
Study on the Vibration Reduction Effect of Piezoelectric Actuation on Flexible Tilting Pad Bearings with Different Structural Parameters

Abstract
:1. Introduction
2. Experimental Procedure
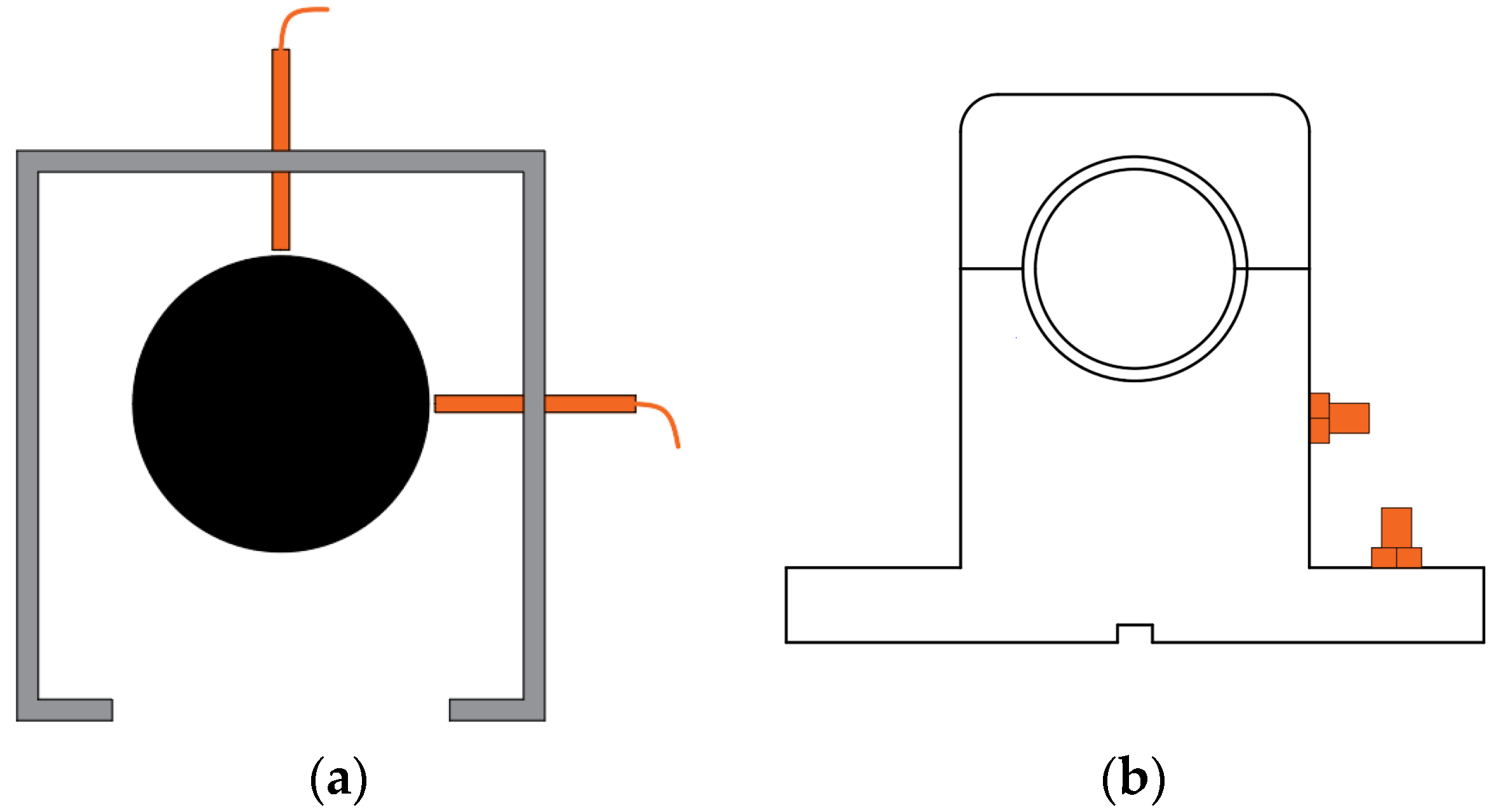
2.1. Design of the Flexible Tilting Pad Bearing Structure and Piezoelectric Drive Structure
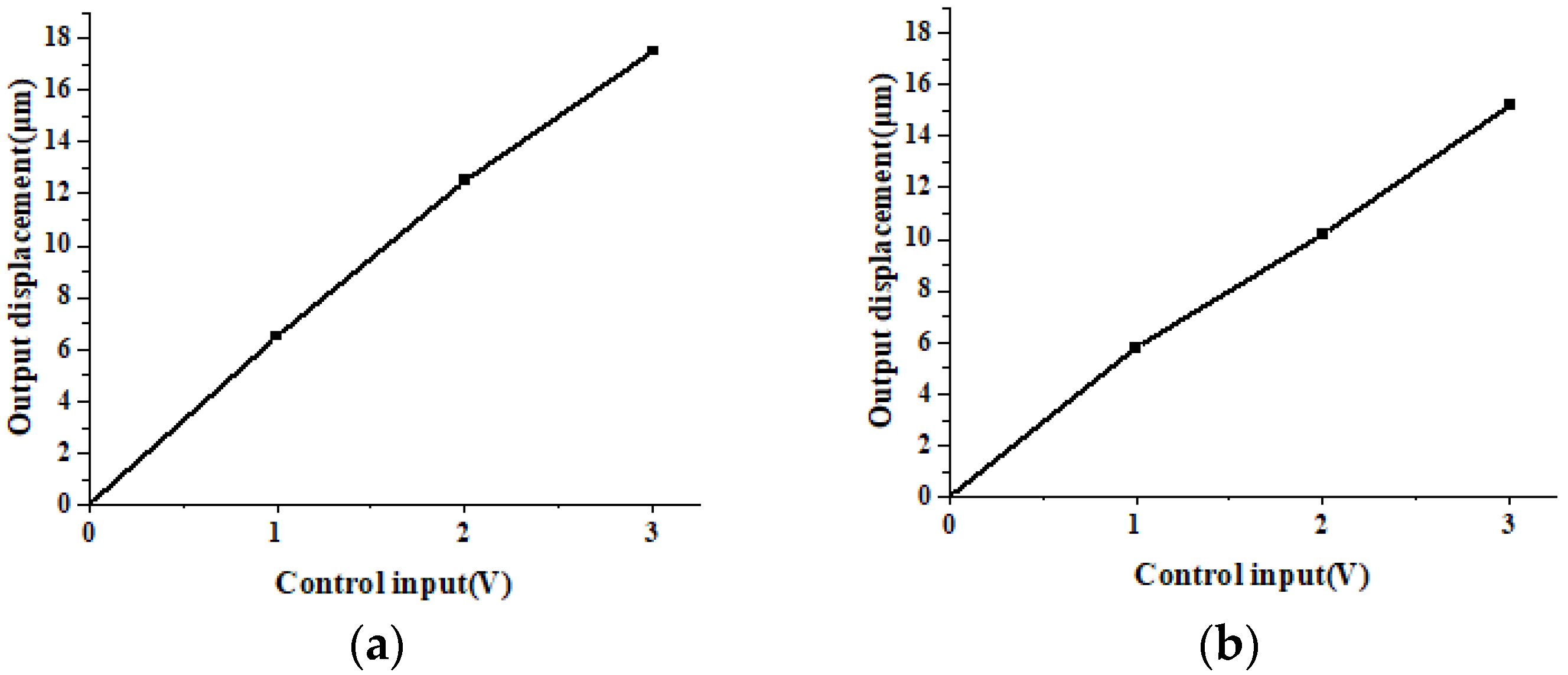
2.2. Calibration of the Piezoelectric Actuator
2.3. Composition of the Experimental Setup
3. Experimental Results and Discussion
3.1. The Effect of Spring Stiffness on Vibration Performance
3.1.1. Loading Condition of 100 N
3.1.2. Loading Condition of 300 N
3.2. The Effect of Radial Clearance on Vibration Performance at Different Speeds
3.2.1. Loading Condition of 100 N
3.2.2. Loading Condition of 300 N
3.3. The Combined Effects of Spring Stiffness and Radial Clearance on Vibration under Different Control Voltages
3.3.1. Loading Condition of 100 N
3.3.2. Loading Condition of 300 N
4. Conclusions
- Four different structural parameter bearings were designed and manufactured. The radial displacement of bearings with different structural parameters was controlled using piezoelectric actuators under 100 N and 300 N loads. The full-time domain vibration amplitude, shaft center trajectories, vibration energy acceleration, and displacement spectra at various speeds were obtained;
- The dynamic performance of two bearings with different spring stiffnesses was analyzed under 100 N and 300 N load conditions using shaft center trajectories and a time–domain waveform analysis. The results showed that the shaft center trajectories and displacement amplitudes of the rotor system with a lower spring stiffness, the DL-FSTPB-1 bearing, significantly decreased at 4000 r/min, 5000 r/min, and 6000 r/min. This indicates that reducing the bearing stiffness can lower the rotor’s resonance amplitude and operational amplitude, aiding in the reduction of the vibration amplitude via piezoelectric actuation, suppressing spindle vibration, and improving the rotor stability;
- The acceleration wavelet analysis and shaft center trajectories of two bearings with different radial clearances at various speeds were compared. The results showed that the shaft center trajectory of the DL-FSTPB-2 bearing with a smaller radial clearance was smaller and closer to the bearing center. At 6000 r/min, the trajectory area significantly decreased, and the fundamental frequency energy peak nearly disappeared. This indicates that reducing the radial clearance increases the pad tilt, bringing the journal closer to the bearing center and adjusting the rotor amplitude;
- Finally, the experiment analyzed the vibration control performance of piezoelectric actuators under different loads for two bearings with different spring stiffnesses and radial clearances. The displacement spectra and shaft center trajectories indicated that the DL-FSTPB-3 bearing with a lower spring stiffness and a smaller clearance showed a 64% reduction in the peak fundamental frequency displacement and a significant decrease in the shaft center trajectory area. This demonstrates that appropriately reducing the radial clearance and spring stiffness effectively suppresses vibrations, enhances the vibration reduction effect of piezoelectric actuation, and increases the stability of the bearing-rotor system.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, Z.; Ji, F.; Guan, Y.; Yuan, X. Vibration and critical characteristics of the tilting pads journal bearing-rotor system. Ind. Lubr. Tribol. 2018, 71, 295–300. [Google Scholar] [CrossRef]
- Delgado, A.; Vannini, G.; Ertas, B.; Drexel, M.; Naldi, L. Identification and Prediction of Force Coefficients in a Five-Pad and Four-Pad Tilting Pad Bearing for Load-on-Pad and Load-Between-Pad Configurations. J. Eng. Gas Turbines Power 2011, 133, 092503. [Google Scholar] [CrossRef]
- Suh, J.; Palazzolo, A. Three-Dimensional Dynamic Model of TEHD Tilting-Pad Journal Bearing—Part I: Theoretical Modeling. J. Tribol. 2015, 137, 041703. [Google Scholar] [CrossRef]
- Dong, J.; Wang, X.; Zhang, J.; Gu, J. Experimental investigation of dynamic behavior of rotor-bearing system with nitrile rubber support. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2018, 232, 1502–1513. [Google Scholar] [CrossRef]
- Hei, D.; Lu, Y.; Zhang, Y.; Lu, Z.; Gupta, P.; Müller, N. Nonlinear dynamic behaviors of a rod fastening rotor supported by fixed–tilting pad journal bearings. Chaos Solitons Fractals 2014, 69, 129–150. [Google Scholar] [CrossRef]
- Amamou, A.; Chouchane, M. Nonlinear stability analysis of long hydrodynamic journal bearings using numerical continuation. Mech. Mach. Theory 2014, 72, 17–24. [Google Scholar] [CrossRef]
- Feng, K.; Liu, W.; Zhang, Z.; Zhang, T. Theoretical model of flexure pivot tilting pad gas bearings with metal mesh dampers in parallel. Tribol. Int. 2016, 94, 26–38. [Google Scholar] [CrossRef]
- Shi, Z.; Jin, Y.; Yuan, X.; Chen, R. Effect of pivot stiffness on nonlinear dynamic characteristics of tilting pad journal bearings. Tribol. Int. 2020, 146, 106222. [Google Scholar] [CrossRef]
- Niu, Y. Effects of textured surfaces on the properties of hydrodynamic bearing. Int. J. Adv. Manuf. Technol. 2022, 118, 1589–1596. [Google Scholar] [CrossRef]
- Wang, M.; Liao, S.; Fang, X.; Fu, S. Active Vibration Suppression Based on Piezoelectric Actuator. In Piezoelectric Actuators; Cheng, T., Li, J., Eds.; IntechOpen: London, UK, 2022. [Google Scholar] [CrossRef]
- Yogaraju, R.; Ravikumar, L.; Saravanakumar, G.; Shravankumar, C.; Kumar, V.A. Feasibility and Performance Studies of a Semi Active Journal Bearing. Procedia Technol. 2016, 25, 1154–1161. [Google Scholar] [CrossRef]
- Kim, M.; Heo, J.; Rodrigue, H.; Lee, H.; Pané, S.; Han, M.; Ahn, S. Shape Memory Alloy (SMA) Actuators: The Role of Material, Form, and Scaling Effects. Adv. Mater. 2023, 35, 2208517. [Google Scholar] [CrossRef] [PubMed]
- Sarath, S.; Paul, P.S.; Lawrance, G. Characterization and performance analysis of magnetorheological foam damper for vibration control during boring process. Multiscale Multidiscip. Model. Exp. Des. 2024, 7, 837–854. [Google Scholar] [CrossRef]
- Sharma, S.C.; Kumar, N. Performance of electro-rheological (ER) lubricant operated hybrid circular thrust pad bearing considering 3D surface irregularities. Tribol. Int. 2023, 185, 108554. [Google Scholar] [CrossRef]
- Shang, T.; Huang, Q.; Wang, Y. Vibration reduction and energy harvesting on the ship thrust bearing unit excited by a measured shaft longitudinal vibration using NES-GMM. Ocean. Eng. 2024, 294, 116914. [Google Scholar] [CrossRef]
- Manjunath, T.C.; Bandyopadhyay, B. Vibration control of Timoshenko smart structures using multirate output feedback based discrete sliding mode control for SISO systems. J. Sound Vib. 2009, 326, 50–74. [Google Scholar] [CrossRef]
- Wang, C.; Xie, X.; Chen, Y.; Zhang, Z. Investigation on active vibration isolation of a Stewart platform with piezoelectric actuators. J. Sound Vib. 2016, 383, 1–19. [Google Scholar] [CrossRef]
- Morosi, S.; Santos, I.F. Active lubrication applied to radial gas journal bearings. Part 1: Modeling. Tribol. Int. 2011, 44, 1949–1958. [Google Scholar] [CrossRef]
- Mizumoto, H.; Arii, S.; Yabuta, Y.; Tazoe, Y. Vibration control of a high-speed air-bearing spindle using an active aerodynamic bearing. In Proceedings of the ICCAS, Gyeonggi-do, Republic of Korea, 27–30 October 2010; pp. 2261–2264. [Google Scholar]
- Chen, R.; Ouyang, W.; Shi, Z.; Wei, Y.; Yuan, X. Characteristic Analysis and Simulated Test of Hybrid Bearing with the Introduction of Piezoelectric Controller. Shock. Vib. 2016, 2016, 6874741. [Google Scholar] [CrossRef]
- Lihua, Y.; Yanhua, S.; Lie, Y. Active control of unbalance response of rotor systems supported by tilting-pad gas bearings. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2012, 226, 87–98. [Google Scholar] [CrossRef]
- da Silveira, A.R.G.; Daniel, G.B. Piezoelectric harvester for smart tilting pad journal bearings. Energy Convers. Manag. 2020, 205, 112338. [Google Scholar] [CrossRef]
- da Silveira, A.R.G.; Daniel, G.B. Optimization analysis of an energy harvester for smart tilting pad journal bearings considering higher vibration modes. Mech. Syst. Signal Process. 2022, 166, 108404. [Google Scholar] [CrossRef]
- Girish, H.; Pai, R. Dynamic performance and stability characteristics of a multi pad externally adjustable fluid film bearing. Aust. J. Mech. Eng. 2024, 22, 133–148. [Google Scholar] [CrossRef]
- Peng, S.; Qin, X.; Wang, X.; Huang, G.; Xiong, X. Experimental Study of Piezoelectric Control for Changing Tilting Pad Journal Bearing Circumferential Angle and Radial Displacement. Lubricants 2023, 11, 510. [Google Scholar] [CrossRef]
- Yan, B.; Brennan, M.; Elliott, S.; Ferguson, N. Active vibration isolation of a system with a distributed parameter isolator using absolute velocity feedback control. J. Sound Vib. 2010, 329, 1601–1614. [Google Scholar] [CrossRef]
- Burkan, R.; Özgüney, Ö.C.; Özbek, C. Model reaching adaptive-robust control law for vibration isolation systems with parametric uncertainty. J. Vibroengineering 2018, 20, 300–309. [Google Scholar] [CrossRef]
- Sang, H.; Yang, C.; Liu, F.; Yun, J.; Jin, G. A fuzzy neural network sliding mode controller for vibration suppression in robotically assisted minimally invasive surgery. Int. J. Med. Robot. Comput. Assist. Surg. 2016, 12, 670–679. [Google Scholar] [CrossRef]
- Huang, G.; Wang, X.; Qin, X.; Zhu, L.; Yi, S. Experimental investigation of dynamic behavior of rotor system with a novel double layers flexible support tilting pad bearing. Adv. Mech. Eng. 2022, 14, 168781322211164. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Bearing Radius Clearance (mm) | Spring Stiffness (N/m) |
|---|---|---|
| DL-FSTPB | 0.05 | 2.4 × 106 |
| DL-FSTPB-1 | 0.05 | 1.6 × 106 |
| DL-FSTPB-2 | 0.0375 | 2.4 × 106 |
| DL-FSTPB-3 | 0.0375 | 1.6 × 106 |
| Parameter | Value |
|---|---|
| Bearing pad radius (R), mm | 15.05 |
| Bearing length (B), mm | 25 |
| Pad arc angle (°) | 72 |
| Thickness of pads (t), mm | 5 |
| Number of pads | 4 |
| Babbitt alloy thickness, mm | 1 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Nominal Stroke (μm) ± 10% | 38 | Capacitance (μF) | 1.6 |
| Stiffness (N/μm) | 12 | Resonant Frequency (kHz) | 20 |
| Thrust/Tensile Force (N) | 500/100 | Length (mm) | 46 |
| Parameter | Value |
|---|---|
| Young’s modulus (E), GPa | 210 |
| Density (ρ), kg/m3 | 7850 |
| Poisson’s ratio (μ) | 0.3 |
| Shaft diameter (d),mm | 30 |
| Shaft length (L), mm | 750 |
| Mass of shaft (M), kg | 4.17 |
| Supply oil pressure (P), MPa | 0.1 |
| Type of lubricant | ISO-VG32 |
| Type | Rotational Speed | Maximum Energy Value |
|---|---|---|
| DL-FSTPB | 67 Hz (4000 r/min) | 8.205 |
| 83 Hz (5000 r/min) | 7.322 | |
| 100 Hz (6000 r/min) | 2.531 | |
| DL-FSTPB-2 | 67 Hz (4000 r/min) | 7.429 |
| 83 Hz (5000 r/min) | 6.237 | |
| 100 Hz (6000 r/min) | 1.750 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Y.; Wang, X.; Huang, G.; Zhang, X.; Yi, S. Study on the Vibration Reduction Effect of Piezoelectric Actuation on Flexible Tilting Pad Bearings with Different Structural Parameters. Actuators 2024, 13, 365. https://doi.org/10.3390/act13090365
Qin Y, Wang X, Huang G, Zhang X, Yi S. Study on the Vibration Reduction Effect of Piezoelectric Actuation on Flexible Tilting Pad Bearings with Different Structural Parameters. Actuators. 2024; 13(9):365. https://doi.org/10.3390/act13090365
Chicago/Turabian StyleQin, Yanyan, Xiaojing Wang, Guangyao Huang, Xiaohan Zhang, and Shuxiang Yi. 2024. "Study on the Vibration Reduction Effect of Piezoelectric Actuation on Flexible Tilting Pad Bearings with Different Structural Parameters" Actuators 13, no. 9: 365. https://doi.org/10.3390/act13090365
APA StyleQin, Y., Wang, X., Huang, G., Zhang, X., & Yi, S. (2024). Study on the Vibration Reduction Effect of Piezoelectric Actuation on Flexible Tilting Pad Bearings with Different Structural Parameters. Actuators, 13(9), 365. https://doi.org/10.3390/act13090365