Adaptive Control Design and Stability Analysis of Robotic Manipulators

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Lyapunov Approach
2.1. Background
2.2. Adaptive Control of Robotic Manipulators
2.3. The Role of Friction in Stability Analysis
2.4. Limitations
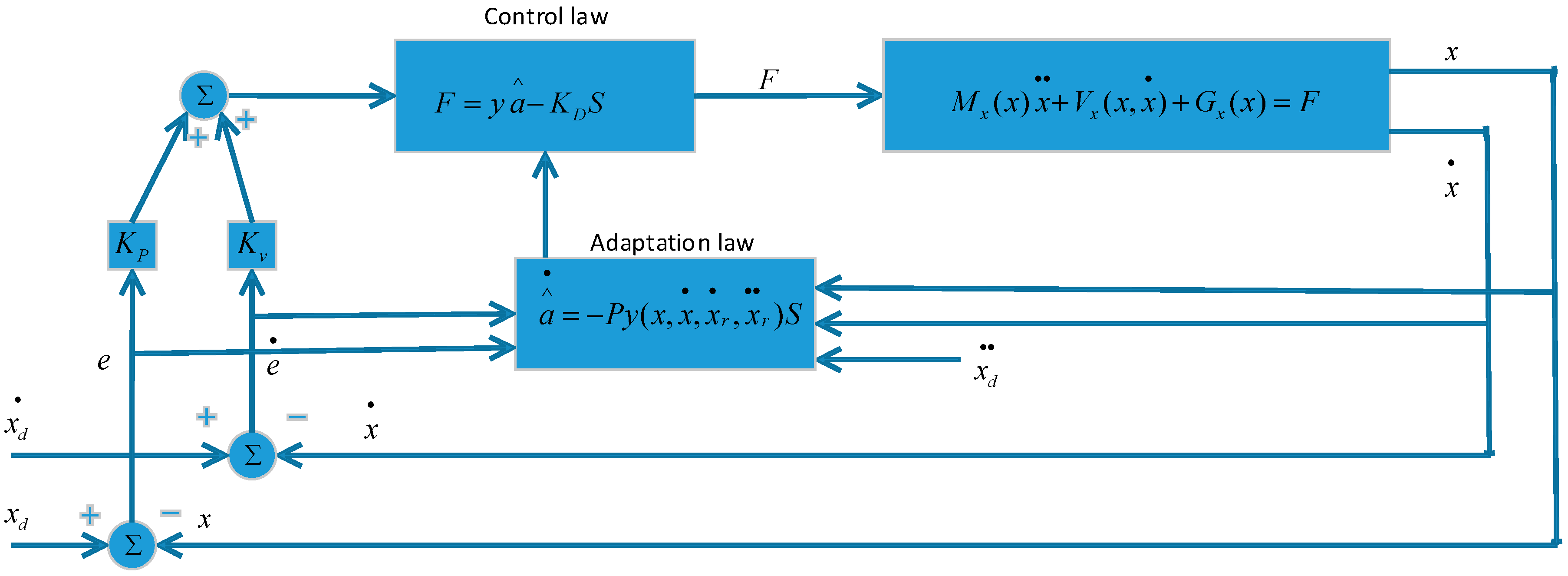
2.5. Operational Space Control Case
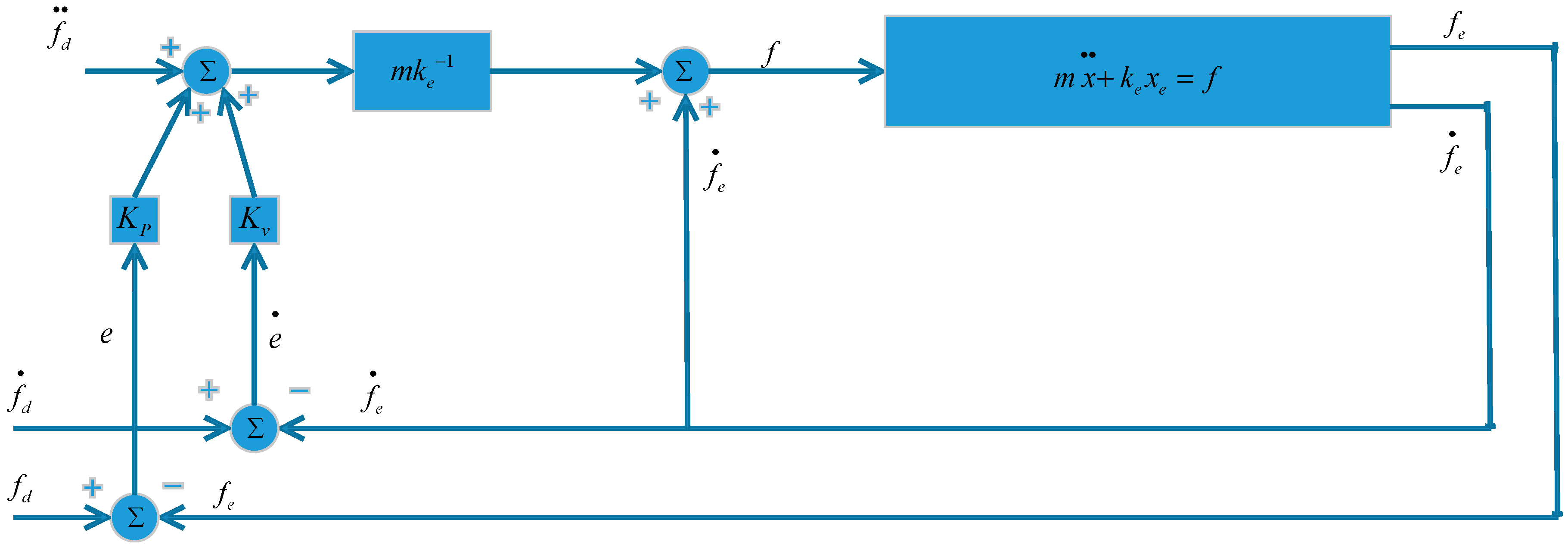
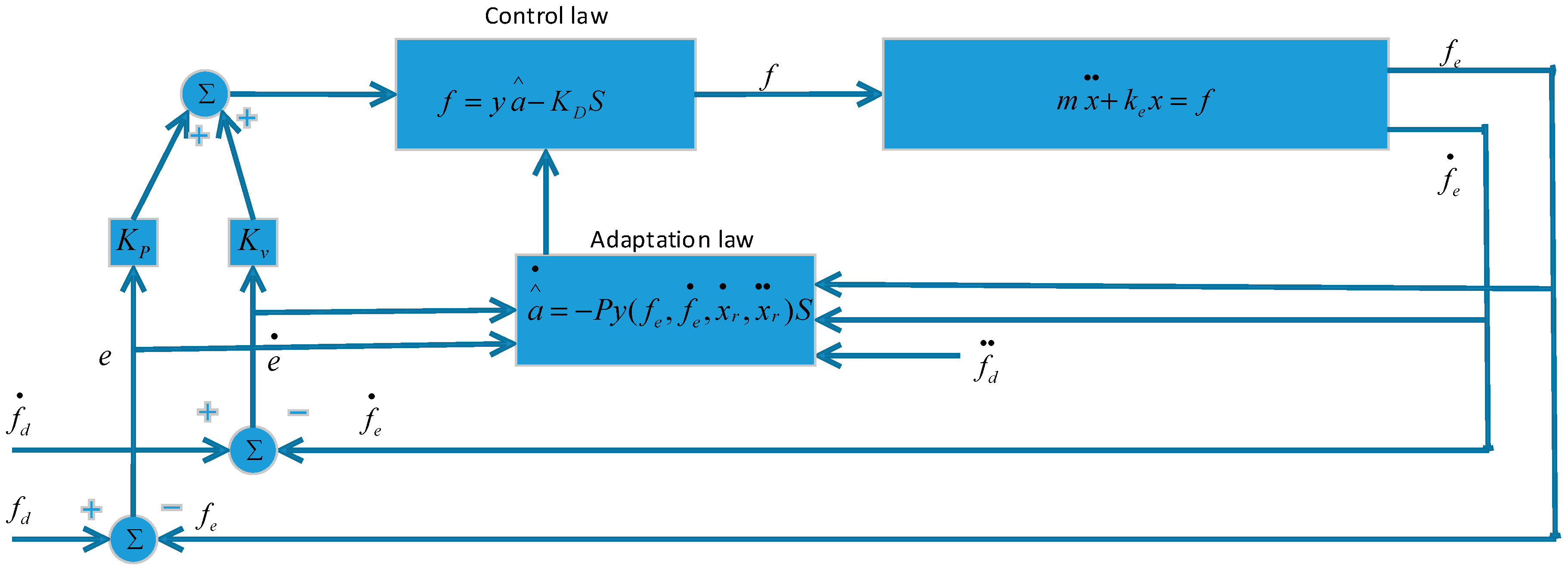
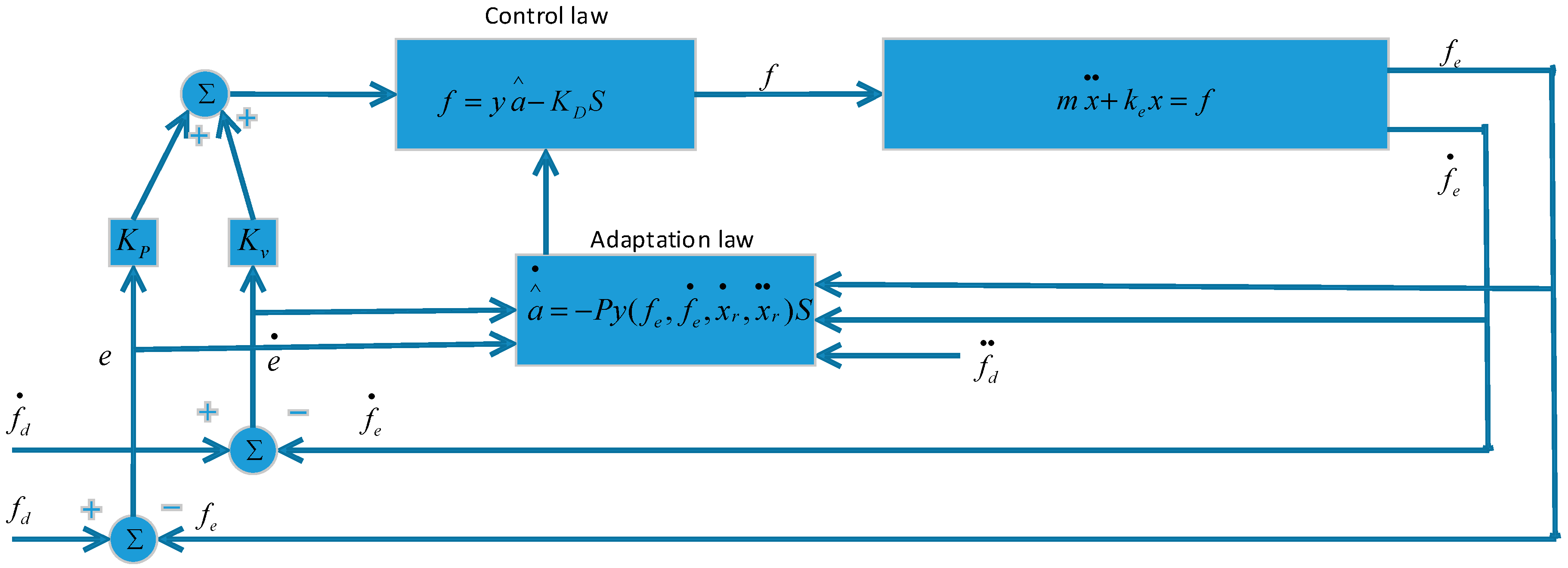
2.6. Force Control Case
3. Hyperstability Approach
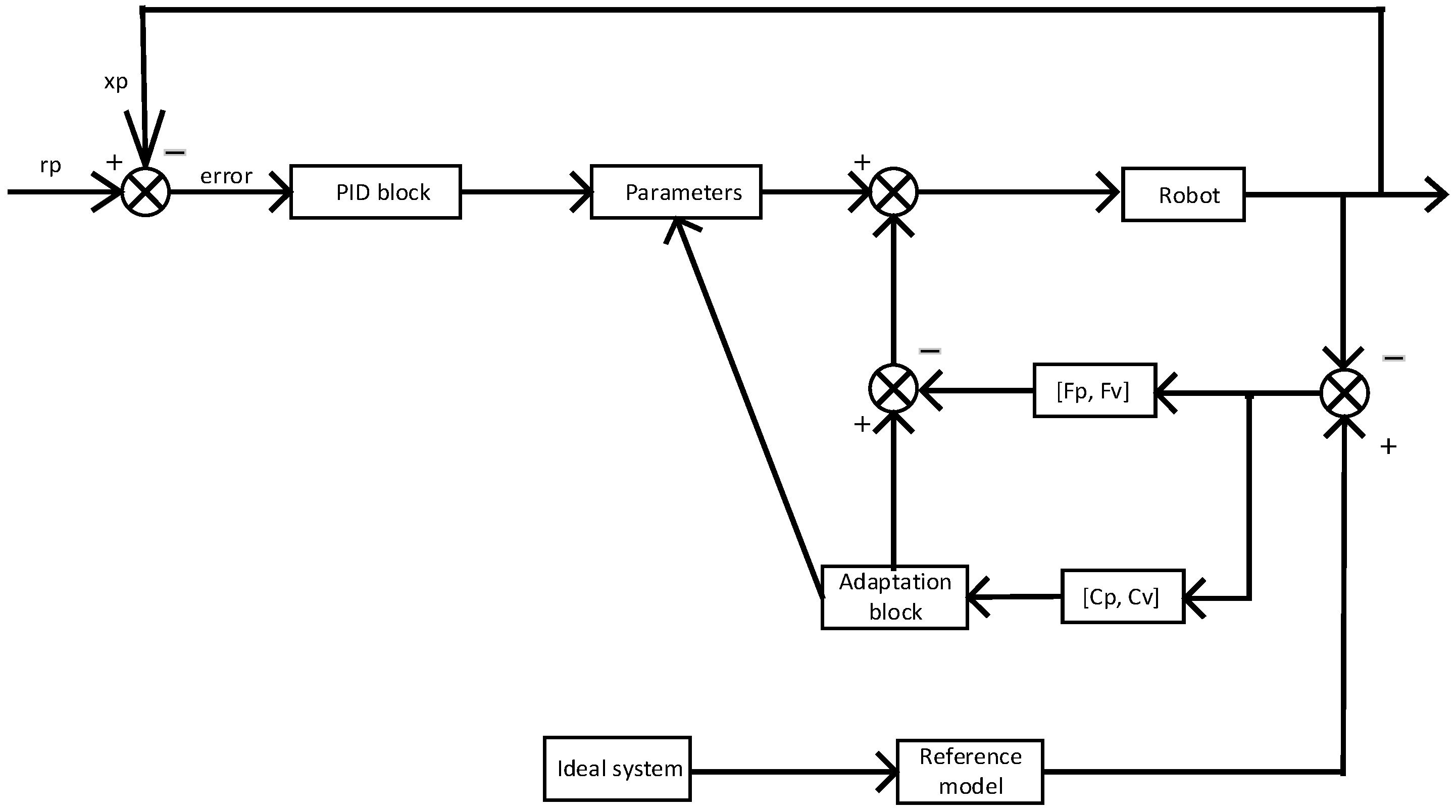
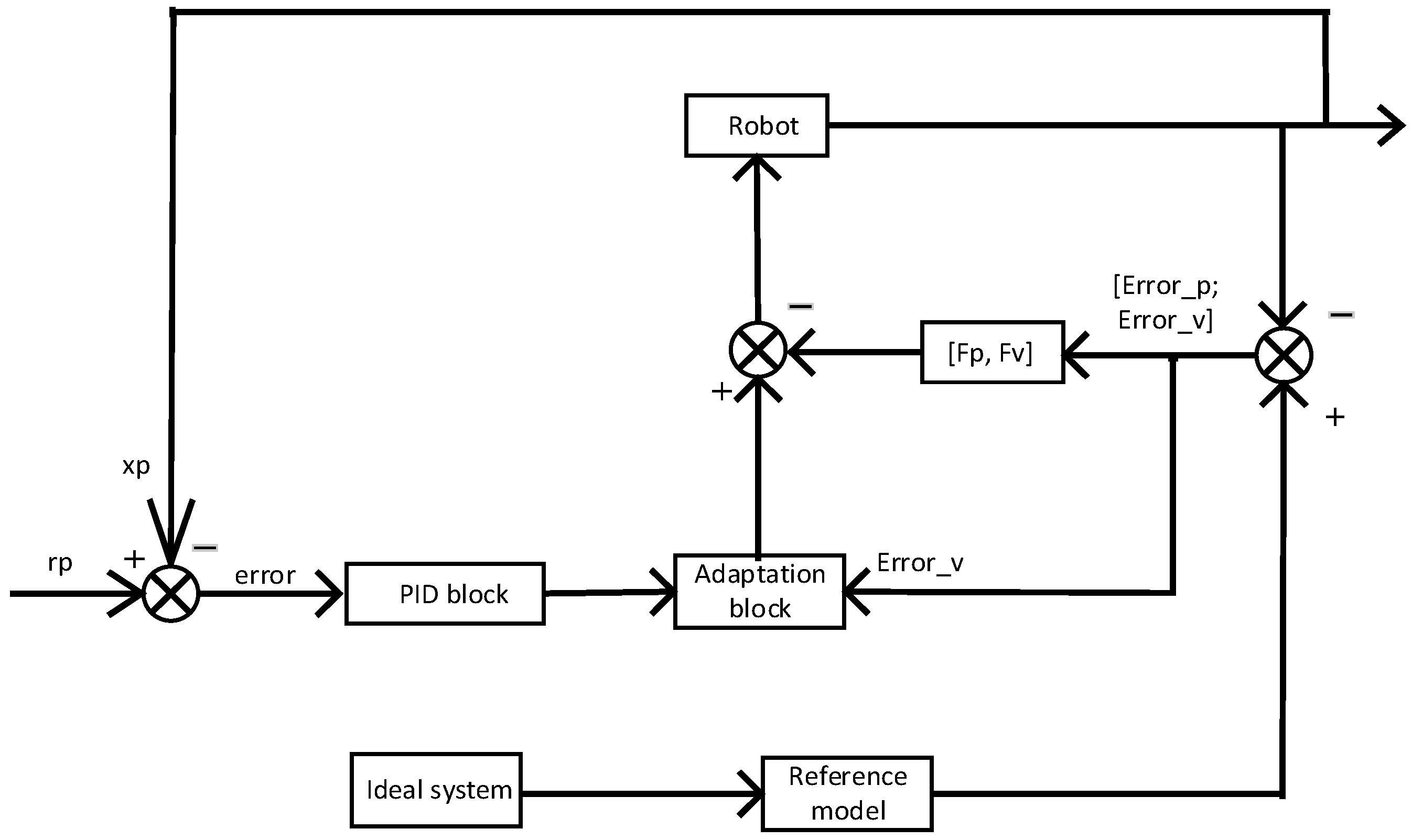
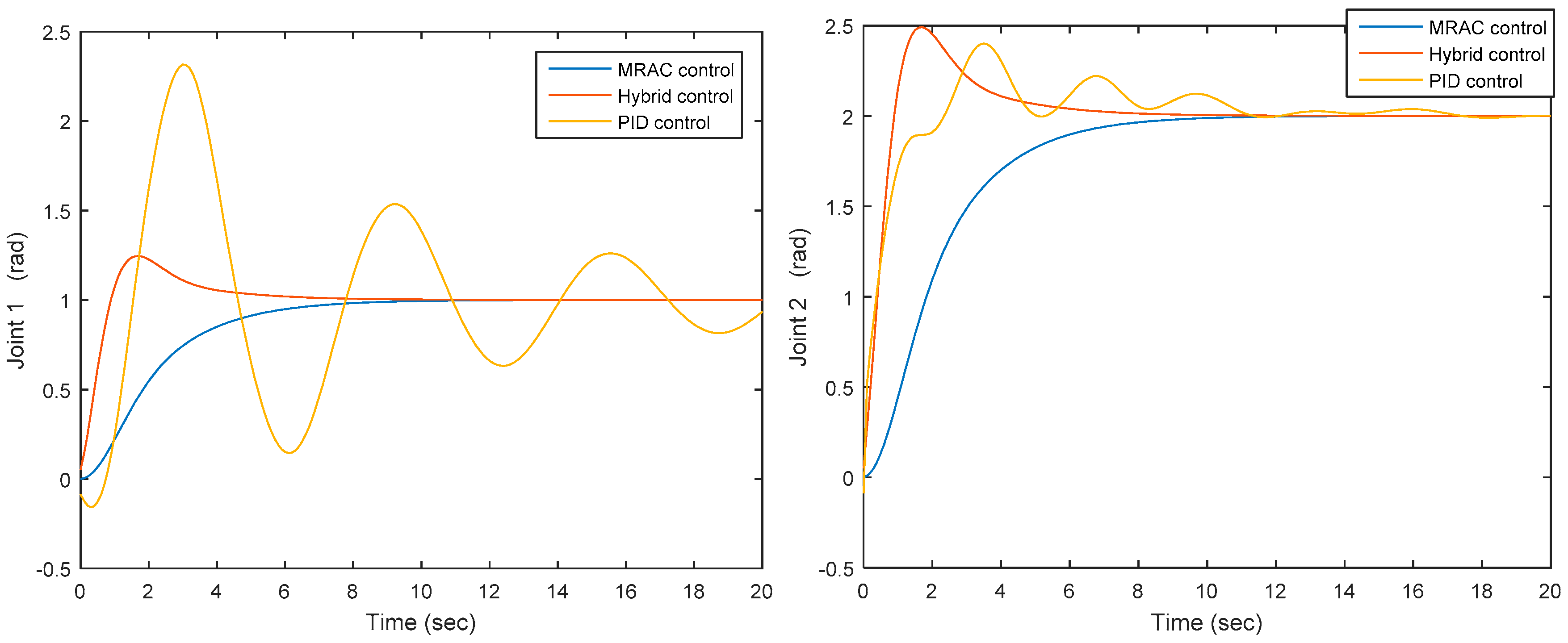
3.1. PID+MRAC Control
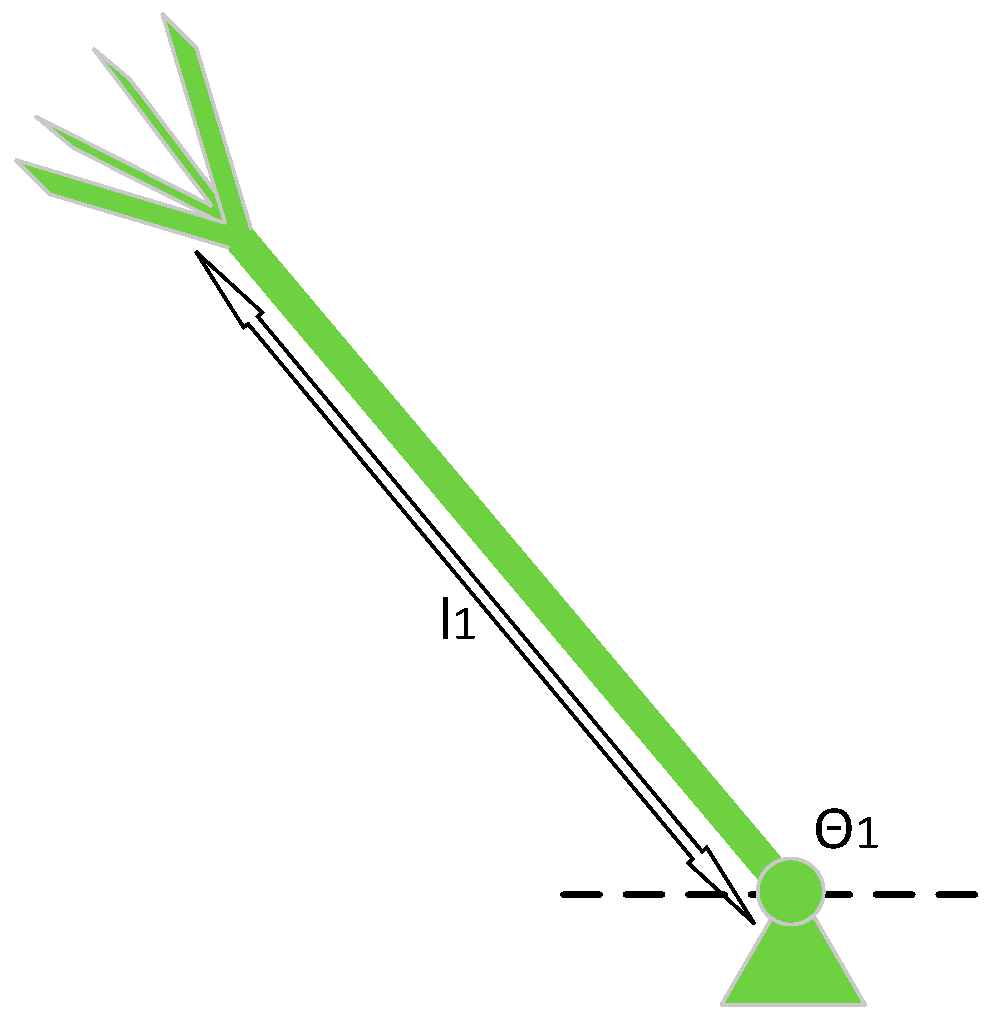
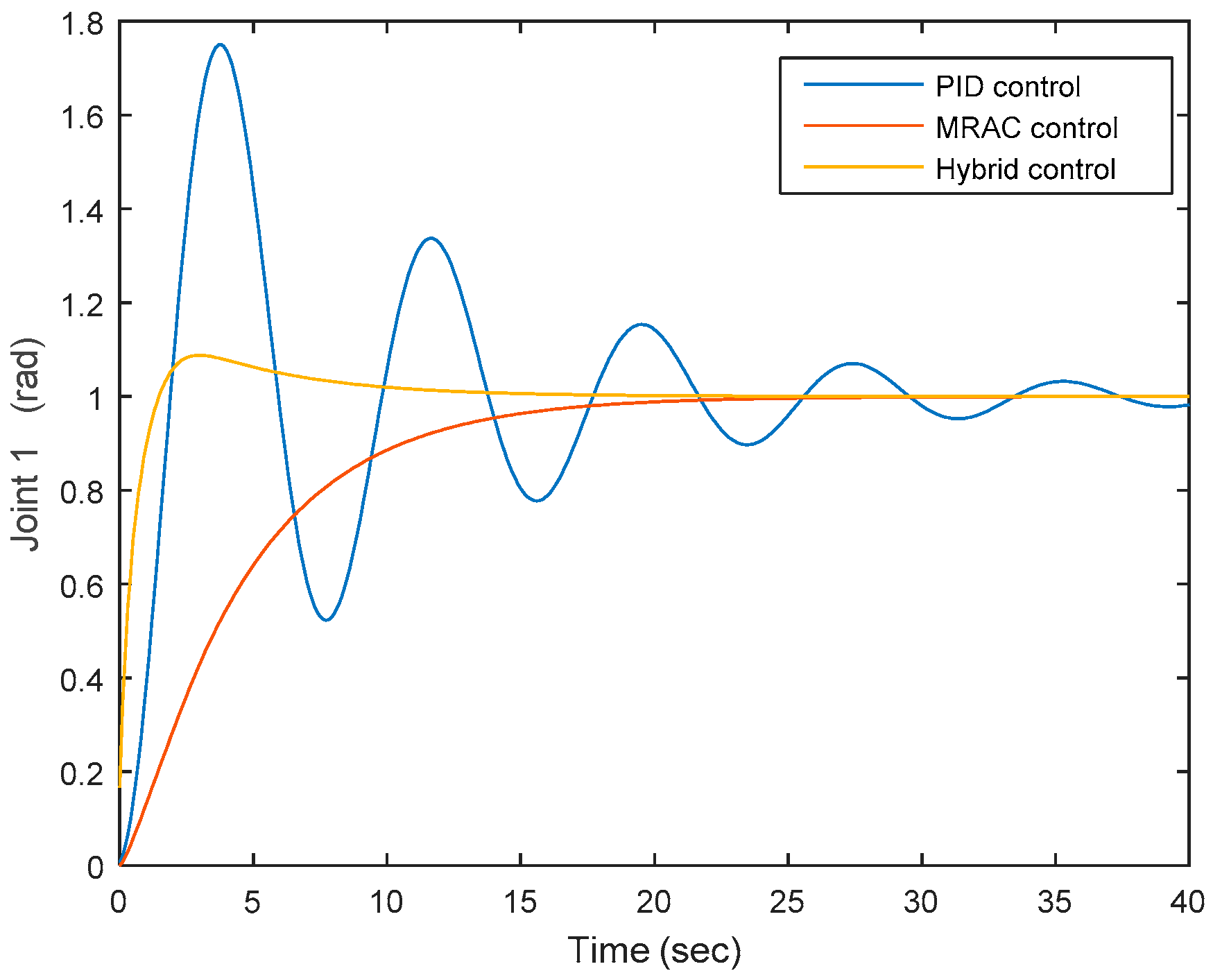
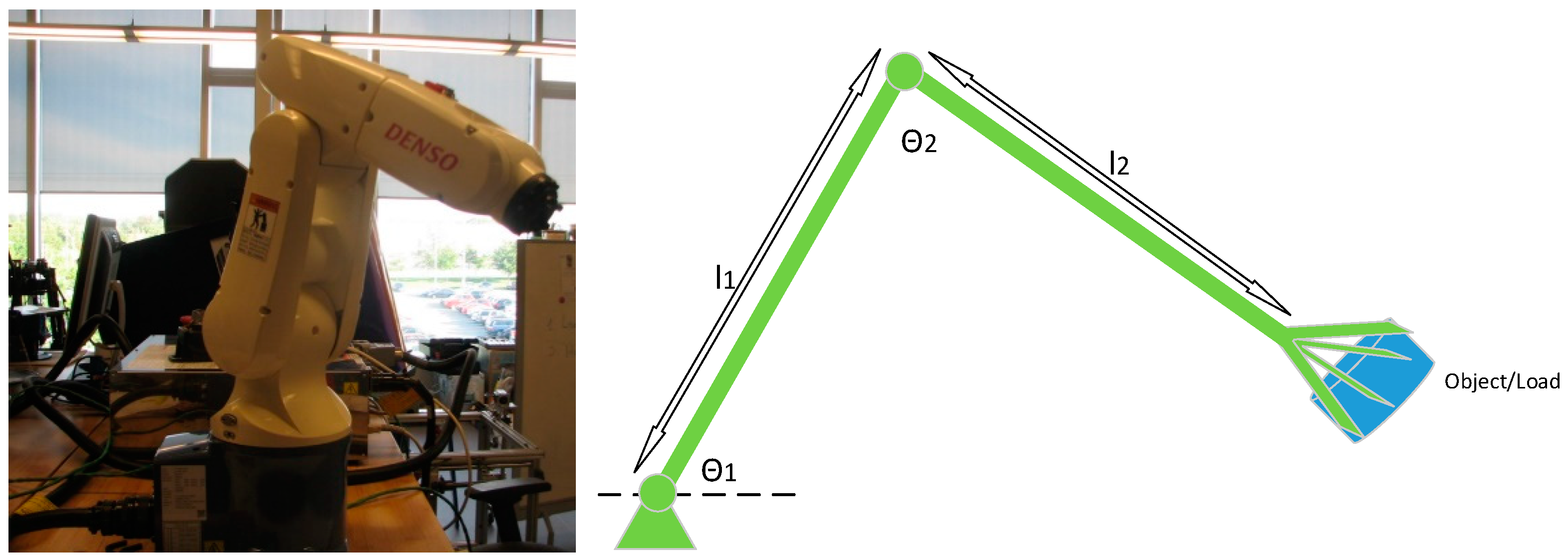
3.2. Modelling and Analysis of One-Linkage Scenario
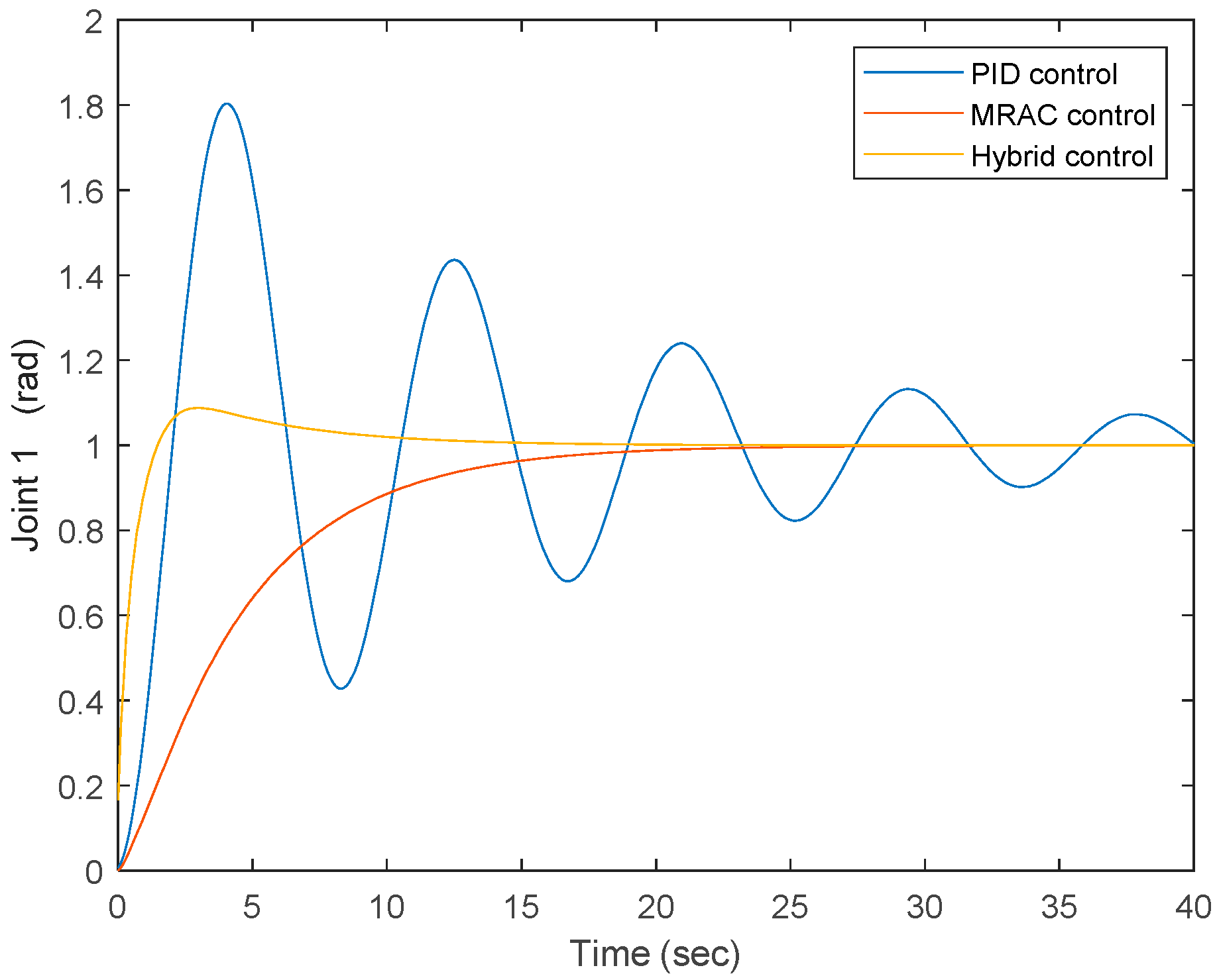
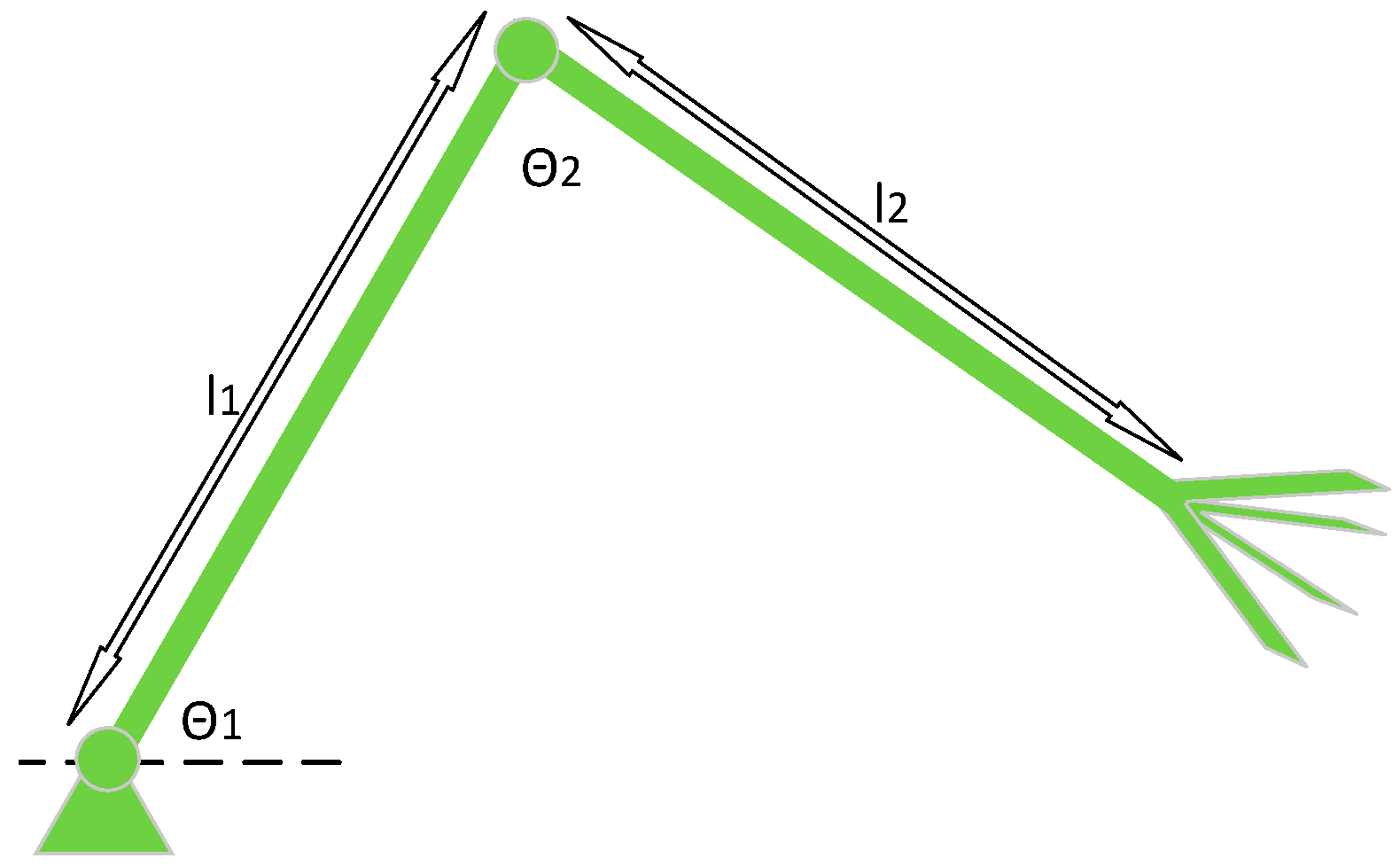
3.3. Modelling and Analysis of Two-DOF Link Scenario
4. Conclusions
Funding
Conflicts of Interest
References
- Liang, Q.; Zhang, D.; Wu, W. Methods and Research for Multi-Component Cutting Force Sensing Devices and Approaches in Machining. Sensors 2016, 16, 1926. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Wei, B. Study on Payload Effects on the Joint Motion Accuracy of Serial Mechanical Mechanisms. Machines 2016, 4, 21. [Google Scholar] [CrossRef]
- Li, Z.; Barenji, A.; Huang, G. Toward a Block-chain Cloud Manufacturing System as a Peer to Peer Distributed Network Platform. Robot. Comput. Integr. Manuf. 2018, 54, 133–144. [Google Scholar] [CrossRef]
- Blanes, C.; Mellado, M.; Beltran, P. Novel Additive Manufacturing Pneumatic Actuators and Mechanisms for Food Handling Grippers. Actuators 2014, 3, 205–225. [Google Scholar] [CrossRef] [Green Version]
- Khatib, O. A unified approach for motion and force control of robot manipulators: The operational space formulation. IEEE J. Robot. Autom. 1987, 3, 45–53. [Google Scholar] [CrossRef]
- Landau, Y.D. Adaptive Control: The Model Reference Approach; Marcel Dekker: New York, NY, USA, 1979. [Google Scholar]
- Song, A.; Pan, L.; Xu, G. Adaptive motion control of arm rehabilitation robot based on impedance identification. Robotica 2015, 33, 1795–1812. [Google Scholar] [CrossRef]
- Koivumäki, J.; Mattila, J. Stability-guaranteed impedance control of hydraulic robotic manipulators. IEEE/ASME Trans. Mechatron. 2017, 22, 601–612. [Google Scholar] [CrossRef]
- Xu, G.; Song, A. Adaptive impedance control for upper-limb rehabilitation robot using evolutionary dynamic recurrent fuzzy neural network. J. Intell. Robot. Syst. 2011, 62, 501–525. [Google Scholar] [CrossRef]
- Li, P.; Ge, S.S.; Wang, C. Impedance control for human-robot interaction with an adaptive fuzzy approach. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 5889–5894. [Google Scholar]
- Li, Z.; Liu, J.; Huang, Z.; Peng, Y.; Pu, H.; Ding, L. Adaptive Impedance Control of Human–Robot Cooperation Using Reinforcement Learning. IEEE Trans. Ind. Electron. 2017, 64, 8013–8022. [Google Scholar] [CrossRef]
- Sharifi, M.; Behzadipour, S.; Vossoughi, G. Nonlinear model reference adaptive impedance control for human–robot interactions. Control Eng. Pract. 2014, 32, 9–27. [Google Scholar] [CrossRef]
- Dubowsky, S.; Desforges, D. The application of model-referenced adaptive control to robotic manipulators. J. Dyn. Syst. Meas. Control 1979, 101, 193–200. [Google Scholar] [CrossRef]
- Cao, C.; Hovakimyan, N. Design and Analysis of a Novel L1 Adaptive Control Architecture with Guaranteed Transient Performance. IEEE Trans. Autom. Control 2008, 53, 586–591. [Google Scholar] [CrossRef]
- Jain, P.; Nigam, M.J. Design of a Model Reference Adaptive Controller Using Modified MIT Rule for a Second Order System. Adv. Electron. Electr. Eng. 2013, 3, 477–484. [Google Scholar]
- Nguyen, N.; Krishnakumar, K.; Boskovic, J. An Optimal Control Modification to Model-Reference Adaptive Control for Fast Adaptation. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, Hawaii, 18–21 August 2008; pp. 1–19. [Google Scholar]
- Idan, M.; Johnson, M.D.; Calise, A.J. A Hierarchical Approach to Adaptive Control for Improved Flight Safety. AIAA J. Guid. Control Dyn. 2002, 25, 1012–1020. [Google Scholar] [CrossRef]
- Li, X.; Cheah, C.C. Adaptive regional feedback control of robotic manipulator with uncertain kinematics and depth information. In Proceedings of the American Control Conference, Montreal, QC, Canada, 27–29 June 2012; pp. 5472–5477. [Google Scholar]
- Rossomando, F.G.; Soria, C.; Patiño, D.; Carelli, R. Model reference adaptive control for mobile robots in trajectory tracking using radial basis function neural networks. Latin Am. Appl. Res. 2011, 41, 177–182. [Google Scholar]
- Sharifi, M.; Behzadipour, S.; Vossoughi, G.R. Model reference adaptive impedance control in Cartesian coordinates for physical human–robot interaction. Adv. Robot. 2014, 28, 1277–1290. [Google Scholar] [CrossRef]
- Ortega, R.; Panteley, E. L1—Adaptive Control Always Converges to a Linear PI Control and Does Not Perform Better than the PI. In Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 24–29 August 2014; pp. 6926–6928. [Google Scholar]
- Horowitz, R.; Tomizuka, M. An Adaptive Control Scheme for Mechanical Manipulators—Compensation of Nonlinearity and Decoupling Control. J. Dyn. Syst. Meas. Control 1986, 108, 1–9. [Google Scholar] [CrossRef]
- Sadegh, N.; Horowitz, R. Stability Analysis of an Adaptive Controller for Robotic Manipulators. In Proceedings of the 1987 IEEE International Conference on Robotics and Automation, Raleigh, NC, USA, 31 March–3 April 1987; pp. 1223–1229. [Google Scholar]
- Slotine, J.E.; Li, W. On the adaptive control of robotic manipulators. Int. J. Robot. Res. 1987, 6, 49–58. [Google Scholar] [CrossRef]
- Sadegh, N.; Horowitz, R. Stability and Robustness Analysis of a Class of Adaptive Controllers for Robotic Manipulators. Int. J. Robot. Res. 1990, 9, 74–92. [Google Scholar] [CrossRef]
- Sentis, L.; Park, J.; Khatib, O. Compliant control of multi-contact and center of mass behaviors in humanoid robots. IEEE Trans. Robot. 2010, 26, 483–501. [Google Scholar] [CrossRef]
- Craig, J.J. Introduction to Robotics: Mechanics and Control, 3rd ed.; Pearson/Prentice Hall: New York, NY, USA, 2005. [Google Scholar]
- Candelas, F.; García, G.; Puente, S. Experiences on using Arduino for laboratory experiments of automatic control and robotics. IFAC-PapersOnLine 2015, 48, 105–110. [Google Scholar] [CrossRef]










© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, B. Adaptive Control Design and Stability Analysis of Robotic Manipulators. Actuators 2018, 7, 89. https://doi.org/10.3390/act7040089
Wei B. Adaptive Control Design and Stability Analysis of Robotic Manipulators. Actuators. 2018; 7(4):89. https://doi.org/10.3390/act7040089
Chicago/Turabian StyleWei, Bin. 2018. "Adaptive Control Design and Stability Analysis of Robotic Manipulators" Actuators 7, no. 4: 89. https://doi.org/10.3390/act7040089
APA StyleWei, B. (2018). Adaptive Control Design and Stability Analysis of Robotic Manipulators. Actuators, 7(4), 89. https://doi.org/10.3390/act7040089