Design and Experimental Validation of a 3-DOF Force Feedback System Featuring Spherical Manipulator and Magnetorheological Actuators †



Abstract
:1. Introduction
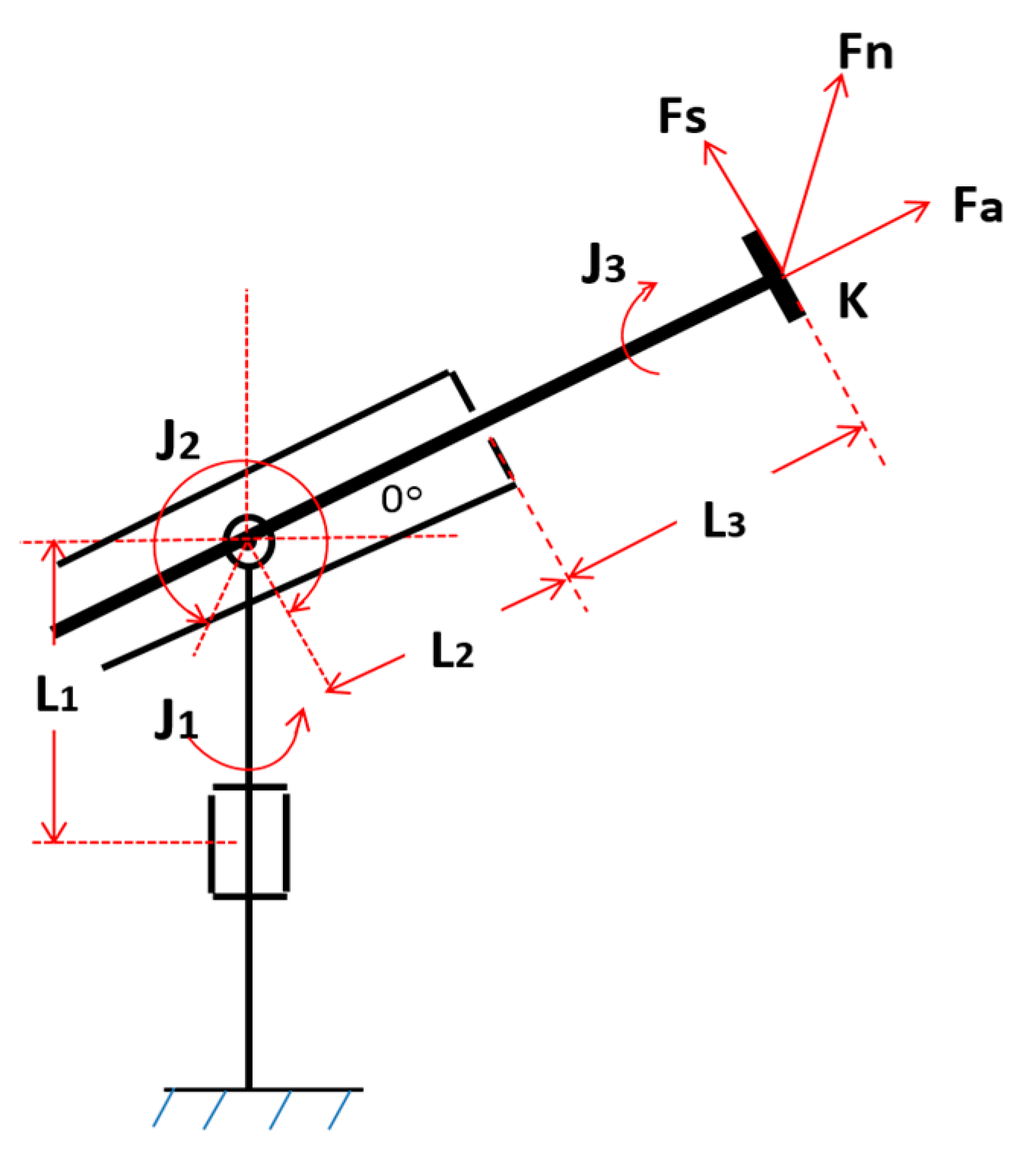
2. The Proposed Spherical Force Feedback System
3. MR Brakes for the 3-DOF Force Feedback System
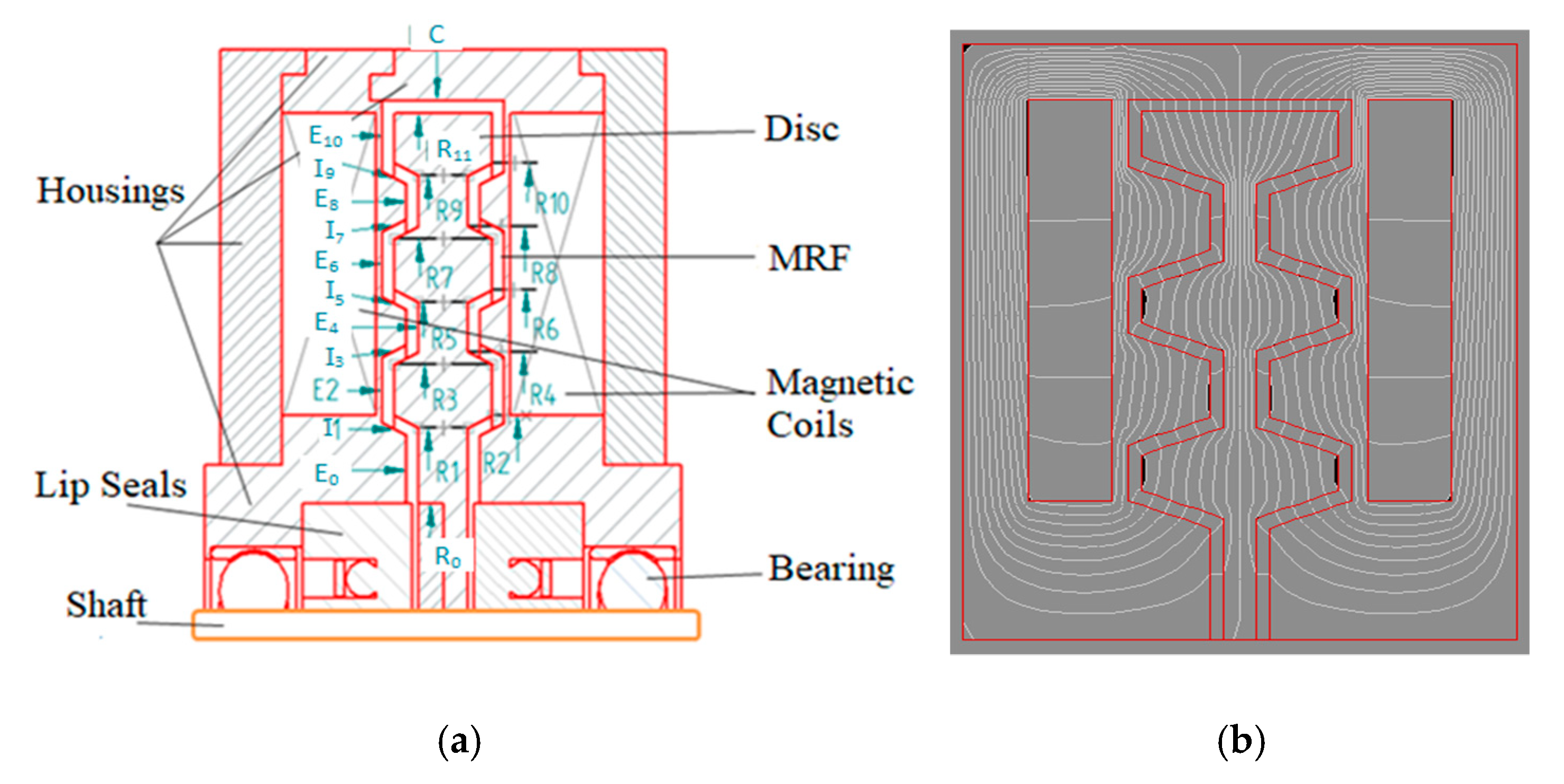
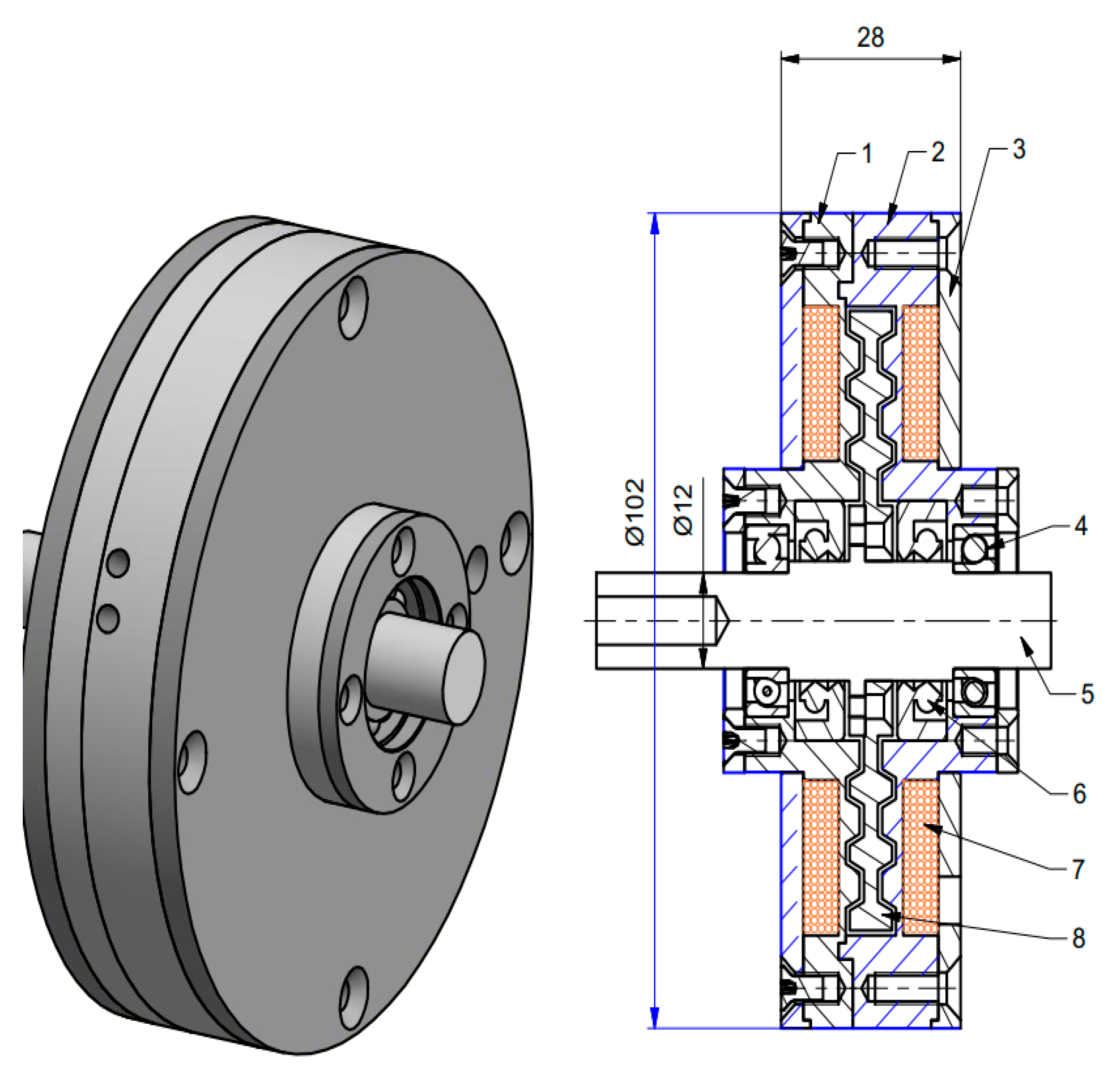
3.1. The Rotary MR Brakes
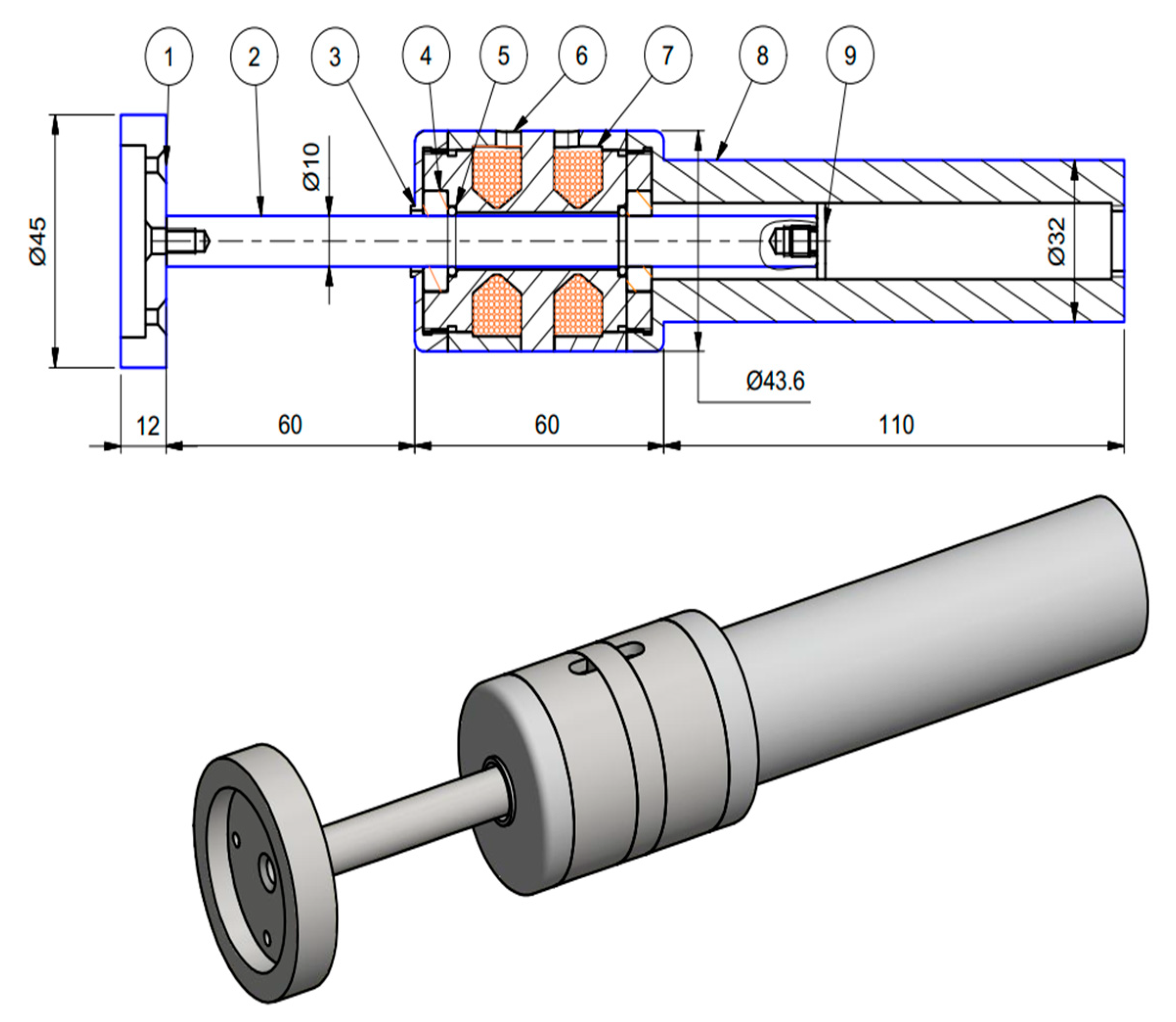
3.2. The Linear MR Brake
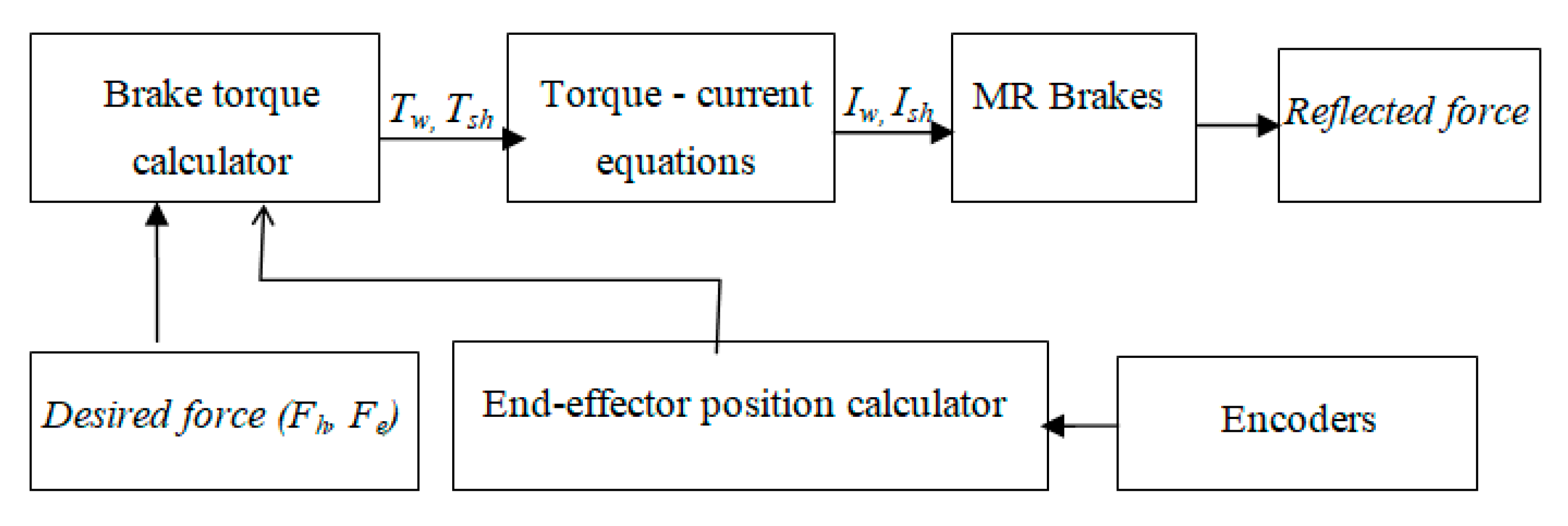
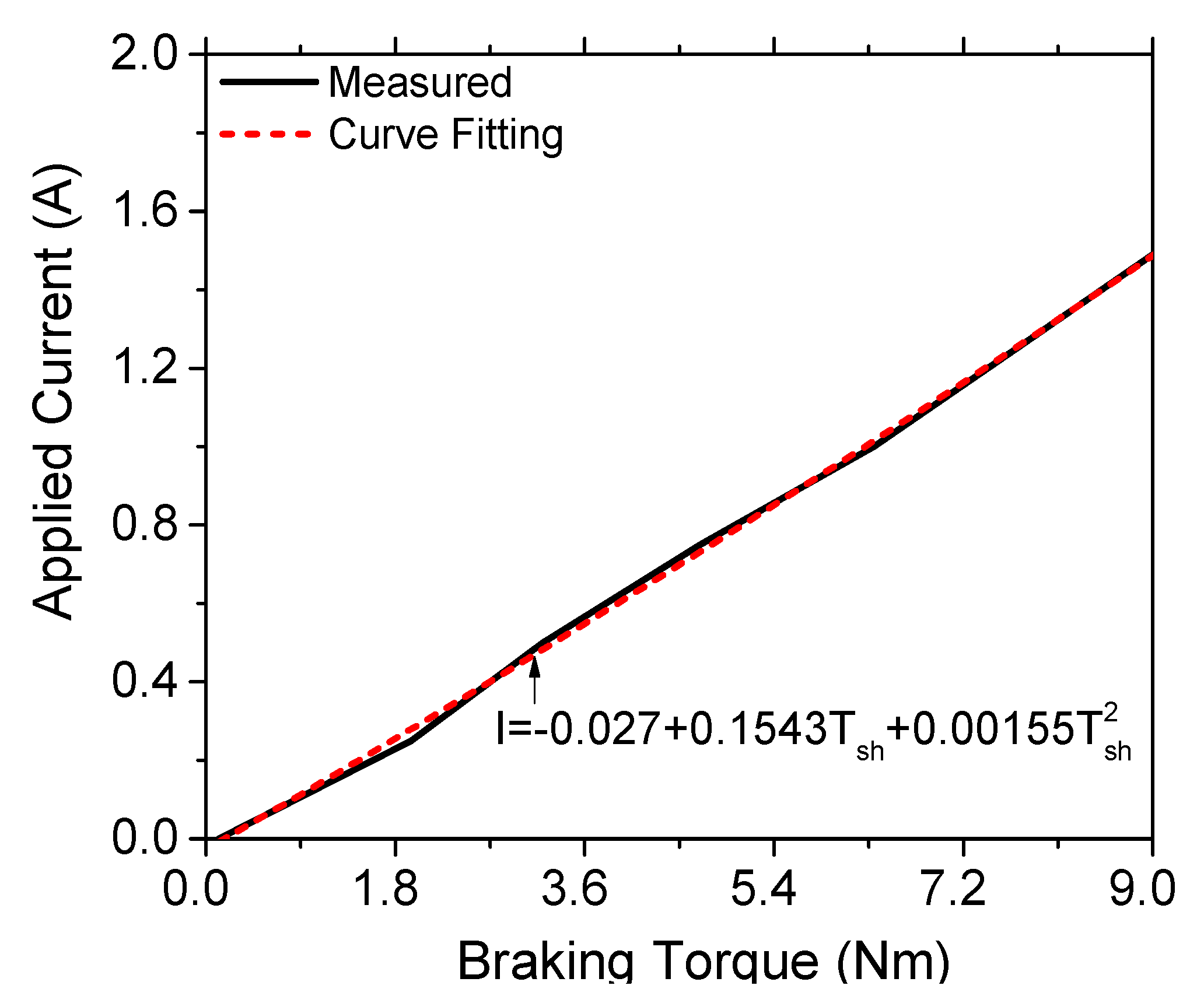
4. Control Design for the Force Feedback System
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Ar | Seal projected area |
| B | Applied magnetic density across the MRF duct |
| ch1, ch2 | Chamfer geometry of the linear MR brake coil |
| d | MRF gap size of the rotary MR brake |
| Fe | Desired feedback elevation tangent force |
| Fh | Desired feedback horizontal tangent force |
| Fr | Desired feedback normal (radial) force |
| For | Friction force between the shaft and the O-ring of the linear MR brake |
| Fsd | Braking force of the linear MR brake |
| fc | Friction per unit length of the shaft circumference |
| fh | Friction force of the O-ring due to fluid pressure acting on a unit seal projected area |
| h | Height of the tooth of the rotary MR brake |
| hc | Height of the MR brake coil |
| hcl | Height of the linear MR brake coil |
| Ir | Current applied to the coils of the linear MR brake |
| Ish | Current applied to the coils of the shoulder MR brake |
| Iw | Current applied to the coils of the waist MR brake |
| L | Length of the MRF duct of the linear MR brake |
| Lo | Seal rubbing surface length (the shaft circumference) |
| l | Length of the inclined gap of the rotary MR brake |
| Ri | Radius of the point i in the disc profile of the rotary MR brake |
| Rs | Radius of the MR brake shaft |
| Rsl | Radius of the linear MR brake shaft |
| R0 | Outer radius of the MR brake disc |
| R1 | Inner tooth radius of the disc |
| Rsl | Radius of the linear MR brake shaft |
| r | Arm radius of the master manipulator |
| Tb | Braking torque of the brake |
| Tbr | Required braking torque |
| Tc | Friction torque caused by MRF in the circular gap C of the rotary MR brake |
| TEi | Friction torque caused by MRF in the vertical gap Ei of the rotary MR brake |
| TIi | Friction torque caused by MRF in the inclined gap Ii of the rotary MR brake |
| Ts | Friction force of the rotary MR brake seals |
| Tsh | Calculated required torque of the shoulder MR brake |
| Tw | Calculated required torque of the waist MR brake |
| td | Thickness of the MR brake disc |
| t0 | Thickness of the outer MR brake housing |
| th | Thickness of the MR brake side housing |
| thl | Thickness of the linear MR brake housing |
| tg | MRF gap size of the linear MR brake |
| Vd | Volume of the disc of the MR brake |
| Vh | Volume of the housing of the MR brake |
| VMR | Volume of the MRF of the MR brake |
| Vs | Volume of the shaft of the MR brake |
| Vc | Volume of the coil of the MR brake |
| v | Relative velocity between the shaft and the housing of the linear MRR brake |
| Lower bound of the corresponding geometric design variable xi | |
| Upper bound of the corresponding geometric design variable xi | |
| Y0 | Zero-applied field value of rheological parameter Y of MRF |
| Y∞ | Saturation value of rheological parameter Y of MRF |
| wc | Width of the MR brake coil |
| wcl | Width of the linear MR brake coil |
| αSY | Saturation moment index of the rheological parameter Y of MRF |
| μEi, τEi | Post-yield viscosity and induced yield stress of the MRF in the gap Ei |
| μIi, τIi | Post-yield viscosity and induced yield stress of the MRF in the gap Ii |
| μc, τc | Post-yield viscosity and induced yield stress of the MRF in the gap C |
| μ | Average post-yield viscosity of the activated MRF of the linear MR brake |
| ϕ | Inclined angle of MRF gap of the rotary MR brake |
| Ω | Angular speed of the brake shaft |
| ρd | Density of material of the MR brake disc |
| ρh | Density of material of the MR brake housing |
| ρMR | Density of material of the MR fluid |
| ρs | Density of material of the MR brake shaft |
| ρc | Density of material of the MR brake coils |
| τy | Average induced yield stress of the activated MRF of the linear MR brake |
| θ | Elevation angle |
References
- Anupam, A.; Pratik, S.; Aditya, J. Haptic Technology: A Comprehensive Review of its Applications and Future prospects. Int. J. Comput. Sci. Inf. Technol. 2014, 5, 6039–6043. [Google Scholar]
- Aude, B.; Stéphane, R. A Review of Haptic Feedback Teleoperation Systems for Micromanipulation and Microassembly. IEEE Trans. Autom. Sci. Eng. 2013, 3, 496–502. [Google Scholar]
- Claudio, P.; Stephen, S.; Massimiliano, S.; Antonio, F.; Vincent, H.; Domenico, P. Wearable Haptic Systems for the Fingertip and the Hand: Taxonomy, Review, and Perspectives. IEEE Trans. Haptics 2017, 10, 580–600. [Google Scholar]
- Nooshin, J.; Kim, D.; Mahdi, T. Haptics to improve task performance in people with disabilities: A review of previous studies and a guide to future research with children with disabilities. J. Rehabil. Assist. Technol. Eng. 2016, 3, 2055668316668147. [Google Scholar]
- Kawasaki, H.; Mouri, T. Design and Control of Five-Fingered Haptic Interface Opposite to Human Hand. IEEE Trans. Robot. 2007, 23, 909–918. [Google Scholar] [CrossRef]
- Gabardi, M.; Solazzi, M.; Leonardis, D.; Frisoli, A. A new wearable fingertip haptic interface for the rendering of virtual shapes and surface features. In Proceedings of the 2016 IEEE Haptics Symposium (HAPTICS), Philadelphia, PA, USA, 8–11 April 2016; pp. 140–146. [Google Scholar]
- Sarakoglou, I.; Garcia-Hernandez, N.; Tsagarakis, N.G.; Caldwell, D.G. A high performance tactile feedback display and its integration in teleoperation. IEEE Trans. Haptics 2012, 5, 252–263. [Google Scholar] [CrossRef] [PubMed]
- Choi, I.; Culbertson, H.; Miller, M.R.; Olwal, A.; Follmer, S. Grabity: A Wearable Haptic Interface for Simulating Weight and Grasping in Virtual Reality. In Proceedings of the 30th Annual ACM Symposium on User Interface Software and Technology, Quebec City, QC, Canada, 22–25 October 2017. [Google Scholar]
- Kapoor, S.; Arora, P.; Kapoor, V.; Jayachandran, M.; Tiwari, M. Haptics- Touch feedback Technology Widening the Horizon of Medicine. J. Clin. Diagn. Res. 2014, 8, 294–299. [Google Scholar]
- Caldwell, D.G.; Tsagarakis, N.; Giesler, C. An integrated tactile/shear feedback array for stimulation of finger mechanoreceptor. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 1, pp. 287–292. [Google Scholar]
- Moy, G.; Wagner, C.; Fearing, R.S. A compliant tactile display for teletaction. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 4, pp. 3409–3415. [Google Scholar]
- Solazzi, M.; Provancher, W.R.; Frisoli, A.; Bergamasco, M. Design of a SMA actuated 2-DOF tactile device for displaying tangential skin displacement. In Proceedings of the 2011 IEEE World Haptics Conference, Istanbul, Turkey, 21–24 June 2011; pp. 31–36. [Google Scholar]
- Koo, I.M.; Jung, K.; Koo, J.C.; Nam, J.D.; Lee, Y.K.; Choi, H.R. Development of soft-actuator-based wearable tactile display. IEEE Trans. Robot. 2008, 24, 549–558. [Google Scholar] [CrossRef]
- Frediani, G.; Mazzei, D.; De Rossi, D.E.; Carpi, F. Wearable wireless tactile display for virtual interactions with soft bodies. Front. Bioeng. Biotechnol. 2014, 2, 31. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pabon, S.; Sotgiu, E.; Leonardi, R.; Brancolini, C.; Portillo-Rodriguez, O.; Frisoli, A.; Bergamasco, M. A data-glove with vibro-tactile stimulators for virtual social interaction and rehabilitation. In Proceedings of the 10th Annual Intl Workshop on Presence, Barcelona, Spain, 25–27 October 2007; pp. 245–248. [Google Scholar]
- Sanfilippo, F.; Hatledal, L.I.; Pettersen, K. A fully–immersive hapto–audio–visual framework for remote touch. In Proceedings of the IEEE International Conference on Innovations in Information Technology, Dubai, UAE, 26–28 October 2015. [Google Scholar]
- Foottit, J.; Brown, D.; Marks, S.; Connor, A. Development of a wearable haptic game interface. EAI Endorsed Trans. Creat. Technol. arXiv 2016, arXiv:1604.08322. [Google Scholar] [CrossRef] [Green Version]
- Turczyn, R.; Kciuk, M. Properties and application of magnetorheological fluids. J. Achiev. Mater. Manuf. Eng. 2006, 18, 127–130. [Google Scholar]
- Satyajit, P.; Suresh, M.S. Experimental Studies on Magnetorheological Brake for Automotive Application. Int. J. Automot. Mech. Eng. 2018, 15, 4893–4908. [Google Scholar]
- Luis Manuel, P.P.; Imperio Anel, P.M.; Luis ML, S.; Oscar, M.R.; Jesús, P.C.; Emmanuel, S.C.; Alex, E.Z. Experimental Investigation of the Magnetorheological Behavior of PDMS Elastomer Reinforced with Iron Micro/Nanoparticles. Polymers 2017, 9, 696–714. [Google Scholar]
- Jesús, G.P.C.; MEdgar, R.M.; Luis MP, P.; Imperio AM, P.; Oscar, M.R.; Alex, E.Z. Fabrication and Characterization of Isotropic and Anisotropic Magnetorheological Elastomers, Based on Silicone Rubber and Carbonyl Iron Microparticles. Polymers 2018, 10, 1343–1356. [Google Scholar]
- Fuchs, A.; Hu, B.; Gordaninejad, F.; Evrensel, C. Synthesis and characterization of magnetorheological polyimide gels. J. Appl. Polym. Sci. 2005, 98, 2402–2413. [Google Scholar] [CrossRef]
- Wei, B.; Gong, X.; Jiang, W.; Qin, L.; Fan, Y. Study on the properties of magnetorheological gel based on polyurethane. J. Appl. Polym. Sci. 2010, 118, 2765–2771. [Google Scholar] [CrossRef]
- Zielinski, T.; Rak, M. Acoustic absorption of foams coated with MR fluid under the influence of magnetic field. J. Intell. Mater. Syst. Struct. 2010, 21, 125–131. [Google Scholar] [CrossRef]
- Gong, Q.; Wu, J.; Gong, X.; Fan, Y.; Xia, H. Smart polyurethane foam with magnetic field controlled modulus and anisotropic compression property. RSC Adv. 2013, 3, 3241–3248. [Google Scholar] [CrossRef]
- Park, B.; Park, B.; Hato, M.; Choi, H. Soft magnetic carbonyl iron microsphere dispersed in grease and its rheological characteristics under magnetic field. Colloid Polym. Sci. 2011, 289, 381–386. [Google Scholar] [CrossRef]
- Dai, J.; Chang, H.; Zhao, R.; Huang, J.; Li, K.; Xie, S. Investigation of the relationship among the microstructure, rheological properties of MR grease and the speed reduction performance of a rotary micro-brake. Mech. Syst. Signal Process. 2019, 116, 741–750. [Google Scholar] [CrossRef]
- Han, G.G.; Choi, S.B.; Sohn, J.W. Experimental Performance Evaluation of a MR Brake-Based Haptic System for Teleoperation. Front. Mater. 2019, 6, 25. [Google Scholar]
- Nguyen, Q.H.; Nguyen, P.B.; Choi, S.B. Optimal Design of a Hybrid MR brake for Haptic Wrist Application. In Proceedings of the SPIE 7977 Active and Passive Smart Structures and Integrated Systems, San Diego, CA, USA, 27 April 2011. [Google Scholar] [CrossRef]
- Song, B.K.; Oh, J.S.; Choi, S.B. Design of a new 4-DOF haptic master featuring magnetorheological fluid. Adv. Mech. Eng. 2014, 6, 843498. [Google Scholar] [CrossRef] [Green Version]
- Oh, J.S.; Choi, S.H.; Choi, S.B. Design of a 4-DOF MR haptic master for application to robot surgery: Virtual environment work. Smart Mater. Struct. 2014, 23, 095032. [Google Scholar] [CrossRef]
- Nguyen, N.D.; Nguyen, X.H.; Tuyen, N.N.; Nguyen, Q.H. Development of a 3-DOF Haptic Tele-manipulator System Using Magnetorheological Brakes. In Proceedings of the International Conference on Advances in Computational Mechanics, Lecture Notes in Mechanical Engineering, Phu Quoc, Vietnam, 2–4 August 2018; pp. 793–805. [Google Scholar]
- Nguyen, N.D.; Nguyen, S.D.; Nguyen, N.T.; Nguyen, Q.H. Development of a Haptic Telemanipulator System Based on MR brakes and Estimated Torques of AC Servo Motors. Adv. Intell. Syst. Comput. 2018, 868, 925–935. [Google Scholar]
- Nguyen, Q.H.; Le, D.T.; Nguyen, N.D.; Le, D.T.; Lang, V.T.; Ngo, V.T. Development of 3-DOF Force Feedback System Using Spherical Arm Mechanism and MR Brakes. In Proceedings of the CMMM 2019, Amsterdam, The Netherlands, 16–18 February 2019. [Google Scholar]
- Nguyen, Q.H.; Nguyen, N.D.; Diep, B.T.; Phan, H.B.; Choi, S.B. Development of a novel magneto-rheological brake with multiple pole rotor. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, Denver, CO, USA, 3 April 2018. [Google Scholar] [CrossRef]
- Nguyen, Q.H.; Nguyen, N.D.; Choi, S.B. Design and evaluation of a novel MR brake with coils placed on side housings. Smart Mater. Struct. 2015, 24, 90590. [Google Scholar]
- Nguyen, Q.H.; Han, Y.M.; Choi, S.B.; Wereley, N.M. Geometry optimization of MR valves constrained in a specific volume using the finite element method. Smart Mater. Struct. 2007, 16, 2242–2252. [Google Scholar] [CrossRef]
- Nguyen, Q.H.; Choi, S.B. Optimal design of an automotive magneto-rheological brake considering geometric dimensions and zero-field friction heat. Smart Mater. Struct. 2010, 19, 115024. [Google Scholar] [CrossRef]
- Song, B.K.; Nguyen, Q.H.; Choi, S.B.; Woo, J.K. The impact of bobbin material and design on magnetorheological brake performance. Smart Mater. Struct. 2013, 22, 105030. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Variable (mm) | Optimized Performance Characteristics |
|---|---|
| Size of coils: width wc = 5.52; height: hc = 15.8; no. of coil turns = 233 Housing: Outer radius R = 34.5; overall length L = 35.8; thickness th = 4.6; thin wall: 1.0 Disc: Inner radius: Ri = 10; outer radius: Rd = 31.2; shaft radius = 6.0; thickness: 2.0 Tooth profile: Total depth = 3.2; top thickness: 2.6, bottom thickness: 4.6 MRF gap: 0.8 | Maximum braking torque: 10 Nm Mass: 1.03 kg Off-state torque: 0.1 Nm Power consumption: 37 W Coil resistant: 2.9 Ω |
| Design Variable (mm) | Optimized Performance Characteristics |
|---|---|
| Size of coils: width wcl = 1.5; height: hcl = 11.3; the chamfer: ch1 = 3.7, ch2 = 5.0, no. of coil turns = 386 Housing: Outer radius R = 21.8; overall length L = 39.2; thin wall: 0.5 Shaft: Shaft radius Rsl = 5.0. MRF gap: 0.6 | Maximum braking force: 40 Nm Mass: 0.46 kg Off-state torque: 6.0 N Power consumption: 11.5 W Coil radius: 2.5 Ω |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Diep, B.T.; Nguyen, N.D.; Tran, T.T.; Nguyen, Q.H. Design and Experimental Validation of a 3-DOF Force Feedback System Featuring Spherical Manipulator and Magnetorheological Actuators. Actuators 2020, 9, 19. https://doi.org/10.3390/act9010019
Diep BT, Nguyen ND, Tran TT, Nguyen QH. Design and Experimental Validation of a 3-DOF Force Feedback System Featuring Spherical Manipulator and Magnetorheological Actuators. Actuators. 2020; 9(1):19. https://doi.org/10.3390/act9010019
Chicago/Turabian StyleDiep, Bao Tri, Ngoc Diep Nguyen, Thanh T. Tran, and Quoc Hung Nguyen. 2020. "Design and Experimental Validation of a 3-DOF Force Feedback System Featuring Spherical Manipulator and Magnetorheological Actuators" Actuators 9, no. 1: 19. https://doi.org/10.3390/act9010019