1. Introduction
Given that structures are vulnerable to external factors such as earthquakes and hurricanes, structural vibration control is essential and necessary. For systems where many control applications are made, the tuned mass damper (TMD) is among the most frequently used control applications. TMDs, initially applied to ships by Frahm [
1], were later studied by Ormondroyd and Den Hartog in the SDOF structure [
2]. Since the proposal of the optimal design formula by Den Hartog in 1956 [
3], many studies have been carried out. TMDs consist of a mass with damping and stiffness elements designed according to the critical frequency of the structure [
4]. In structural systems, in order to obtain the best performance from TMDs, many active and semi-active control methods have been applied besides optimum design methods.
Several linear [
5,
6,
7] and non-linear [
8,
9] controls have been implemented for active control of TMDs in the literature. Active control applications show high performance in suppressing structural vibrations. However, the equipment costs and continuous energy requirements of this control application create difficulties in its implementation. The performance of TMDs in passive operation is limited. Within TMDs, semi-active control methods not only perform better than passive control methods but are also safer than the application of active control methods. In this study, the vibration suppression capability of the STMD was investigated in an MDOF building model. MR dampers were used as the damping element, providing semi-activity of the STMD. MR dampers are semi-active control elements with many advantages such as large force capacity, low power consumption, low cost, and mechanical simplicity.
In the literature, various simulation studies have been performed in STMDs, including with MR dampers; causal sub-optimal control schemes [
10]; clipped optimal control [
11]; LQR control [
12]; sky-groundhook control with optimal fuzzy control [
13]; multiple-input multiple-output (MIMO) fuzzy logic control (FLC) [
14]; Type 1 and 2 fuzzy logic control [
15]; and Bang-Bang control [
16]. In addition to numerical simulation studies, performances of STMDs have been investigated experimentally using different control methods, such as forward feed control [
17], groundhook control [
18], and LQR control [
19]. Both simulation studies and experimental studies have advantages and disadvantages. In numerical simulation studies, it is easy to execute a performance analysis of structural systems. However, mathematical simulation studies conducted under ideal conditions do not include problems that may occur in real systems such as external disturbances and measurement noise. For these reasons, they may not wholly reflect the truth [
20]. Although matching experimental studies with real systems is essential, the installation and operation of experimental systems are often challenging and problematic. However, in recent years Hardware In the Loop Simulation (HILS) or Real-Time Hybrid Simulation (RTHS) methods, which combine both simulation and experimental studies, have been used. These methods consist of two parts—the numerical and the experimental—and they allow for data to be obtained experimentally, as well as to be used in real-time numerical simulation. The experimental part consists of system elements that are difficult to model. The data obtained from the experimental part is used in the simulation study. The HILS method has been studied in many systems, such as structural systems [
21] and vehicles [
20].
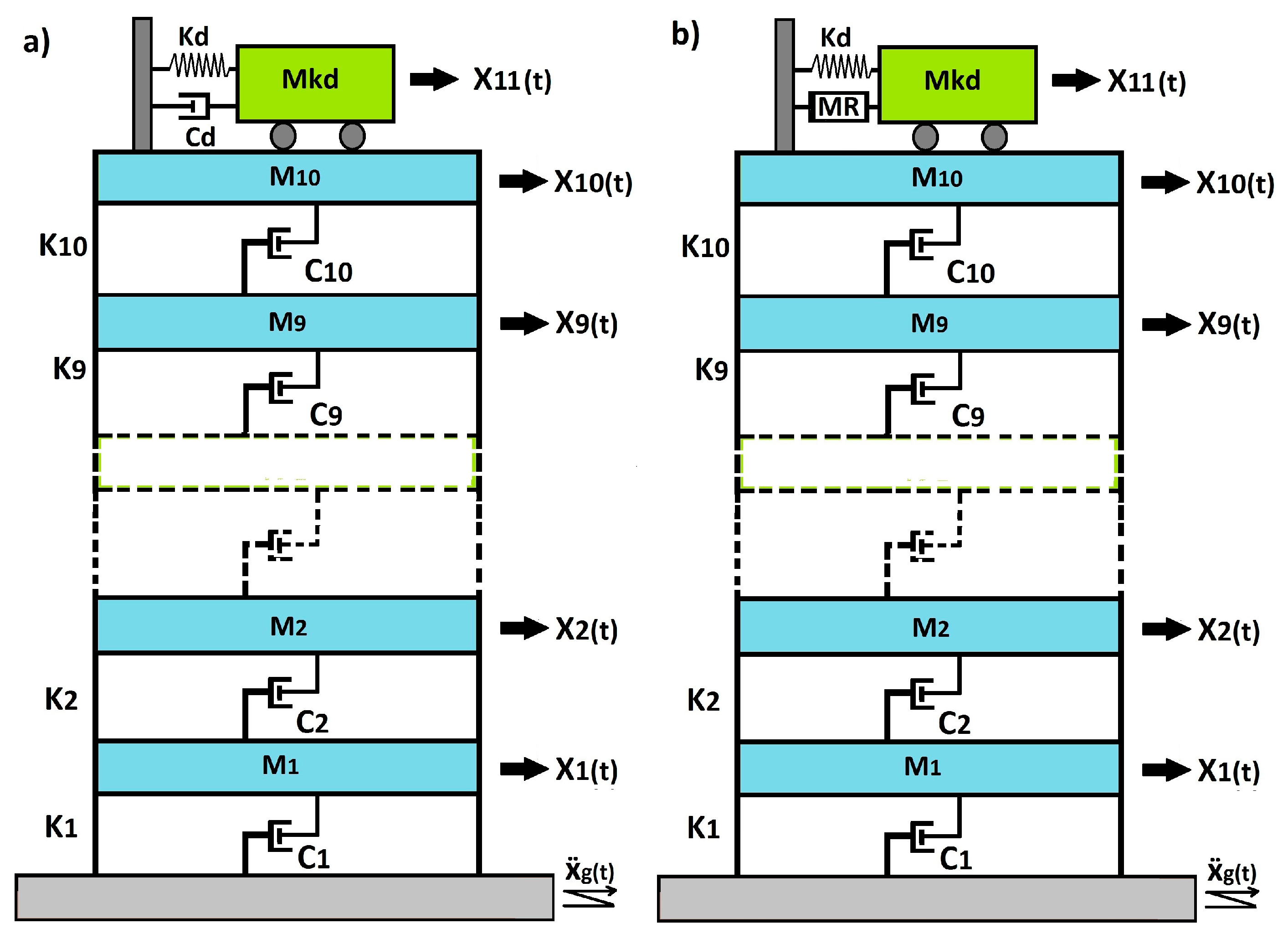
In this study, the performance analysis of STMDs used for structural systems was carried out using the advantages of the HILS method, without the need to establish a purely experimental system. Active control or semi-active control application is performed by adding an actuator to TMDs. For active control applications, these actuators can be servo motors that convert the control force into the motion of the TMD. It can be an MR damper for semi-active control applications. Given the disadvantages of active control applications such as high costs, security problems, and installation costs, MR damper is used in this study. The control element MR damper, which is critical for the system and provides semi-activity of STMD, was set up experimentally, and the other parts of the system were modeled as computer simulations, and the system responses were analyzed by running these two parts simultaneously. The
control theory can be expertly designed to suppress structural system responses [
22,
23,
24,
25]. It can also efficiently improve system responses in active mass dampers [
24]. As seen in the literature, robust
control application for STMDs has not been studied. MR dampers are semi-active control elements that generate force according to the transmitted voltage. Therefore, the robust
control is designed to determine the voltage transmitted to the MR damper.
Contributions of this study: First, the study demonstrates the applicability of the HILS method for the STMDs used in structural vibration control. Here, the MR damper is used as the semi-active control element of the STMD. Second, the study determined the voltage transmitted to the MR damper, which constitutes the experimental part of the HILS method, with the robust control method.
4. Conclusions
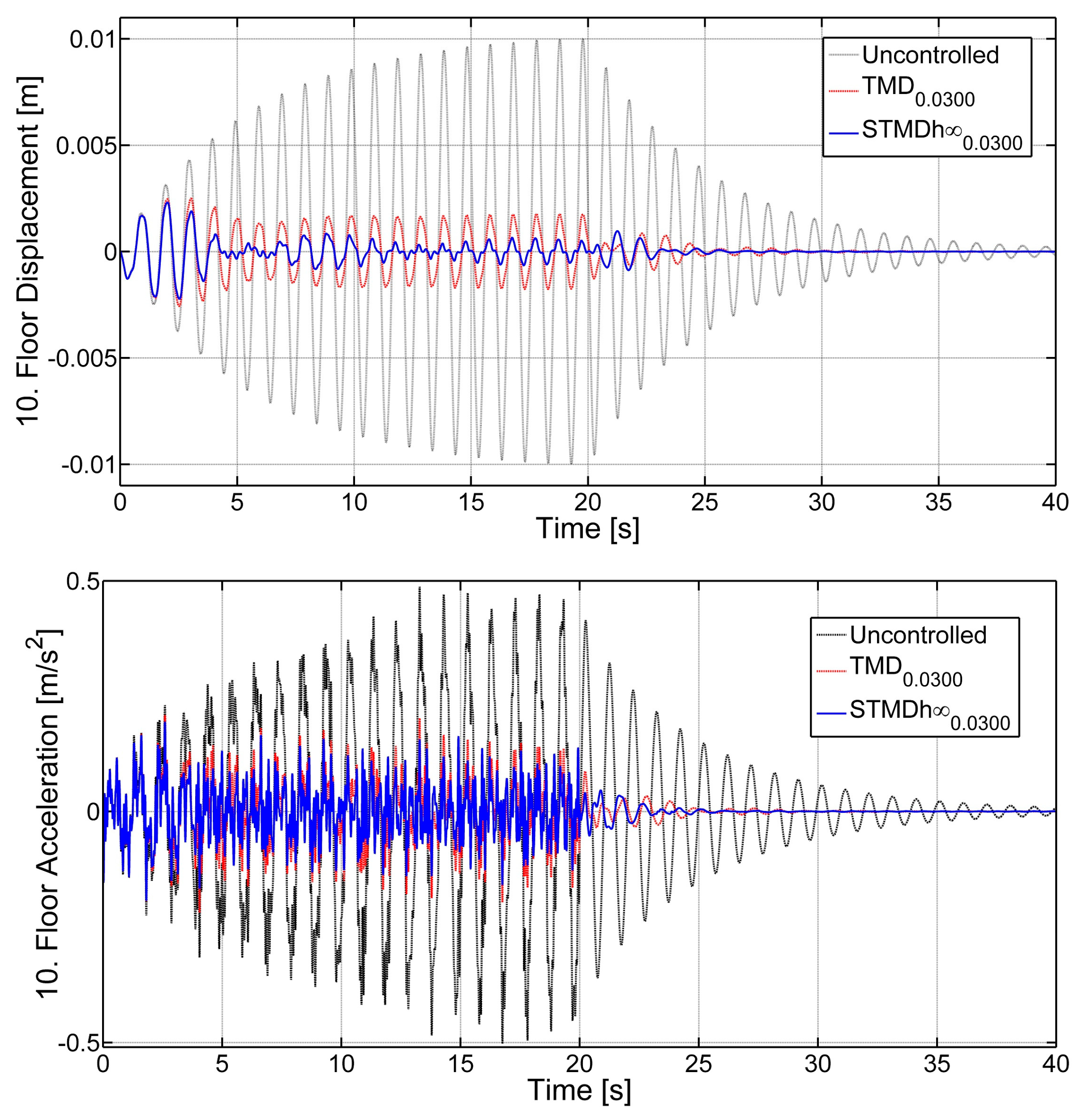
In this study, the performance of STMD—which uses the MR-damper as a semi-active damping element—to improve responses of a building was investigated using the HILS method. The experimental part of the system consisted of MR dampers and sensors, and the simulation part consisted of building model and control algorithms. The connection between these two parts was via an interface. A Robust control was applied to command the MR damper voltage. The system was excited with two different acceleration inputs (the Excitation-1 and the Excitation-2) generated by the natural frequencies of the building model, and the control performances of the TMD and the at different mass ratios were researched. Both excitations appeared to be similar in system displacement responses. However, the system produced completely different results in acceleration responses because frequencies other than the first natural frequency of the system in Excitation-2 affected the acceleration responses more. Moreover, in variable frequency excitations, the voltages transmitted to the MR damper may have caused momentary locking due to its internal structure. For this reason, the control performance decreased in acceleration responses. The results show that the improves system responses more effectively than the TMD in all cases. As seen in all time responses, as the mass ratio of the increases, so do improvements in system responses. The best performance in all control situations was achieved in the . With the control case performing better than the it appears that the performance of the TMD at high mass ratios can be achieved at lower mass ratios than the . The results show that the HILS method is applicable to the STMDs used in structural vibration control. Furthermore, it has been observed that the HILS method improves system responses with the voltage transmitted with control to MR damper, which is critical for the system and experimentally installed.
In future studies, the control performances of STMDs under different earthquake warnings will be investigated with the HILS method. Besides, robust-static output feedback control will be applied to determine the voltage transmitted to the MR damper.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}