This section gives an overview of the current state of the art.
Section 2.1 outlines vertical dynamics components their properties.
Section 2.2 summarizes the objectification methods, while
Section 2.3 and
Section 2.4 provide an overview of passive, semi-active and active suspension systems and the current research into model predictive control in the context of vertical vehicle dynamics control. Finally, the gap in research is outlined in
Section 2.5.
2.1. Suspension Components
The most important suspension components responsible for vertical vehicle dynamics are the springs and dampers, because it is these that have a major effect on the vehicle’s response to road irregularities and the reaction of the vehicle body to longitudinal and lateral accelerations. In combination with the mass of the vehicle body, the unsprung mass and the vertical stiffness of the tires, they define the frequency response of the vehicle in the range of
to
, which includes the body-mode eigenfrequency and the wheel-mode eigenfrequency. A more detailed description of this is given in
Section 2.3. The general characteristics of passive and (semi-)active suspension springs and dampers will be explained in the following. Further information can be found in [
10] (pp. 426–474).
The majority of main suspension springs fitted to road cars are either coil-, leaf- or air-type. Most active springs are air-type that can either switch between different airchambers to change suspension stiffness [
11], or are controlled by air-pressure, mainly for ride-height adjustments in a low-bandwidth system [
5]. An example of a high-bandwidth active spring system for controlling vehicle response is presented in [
12]. Anti-roll bars (ARBs) are another type of springs fitted to vehicles, which connect the wheels (unsprung masses) of an axle to reduce body roll under lateral acceleration. The wheels are coupled, and any road-excitation from one side is transferred to the other. Active ARBs were developed as a means of providing roll stiffness under lateral acceleration, varying the roll-stiffness distribution, and minimizing coupling during straight-line driving. Examples of such systems are described in [
13,
14]. Besides springs, dampers are another integral part of a vehicle suspension. The design and working principles of suspension dampers are described in detail by Dixon [
15]. As will be shown in
Section 2.3, there is a conflict between ride comfort and road-holding. Electronically controlled, semi-active continuously variable dampers (CVD) were invented in an attempt to resolve this conflict. CVDs are usually magnetorheological [
16] or electromechanical [
17] systems. An implementation of a control system for CVDs is described in [
18]. Active dampers are able to generate a desired force independently of the relative velocity of the damper, as introduced by Daimler [
19]. An overview of passive, semi-active and active suspension dampers is given in [
17]. There are also other active elements that cannot be directly classified as springs, dampers or ARBs, for example the fully active system developed by Lotus [
20], or the system introduced by Ovalo and Audi, which can be installed in place of an ARB [
21].
2.2. Objective Performance Measures
To quantify the performance of a vehicle suspension by simulation, it is necessary to define objective performance indicators that reflect human perception while driving a vehicle. In the context of this research, objective measures for vertical vehicle dynamics are needed. In terms of comfort, the main task of the suspension system is to insulate the vehicle occupant from road vibration induced by road irregularities. In order to quantify suspension performance, it is therefore necessary to quantify the vibration of the car body for a given road excitation, as it is this vibration that is transferred to the vehicle occupant through the seat, and it is also the output quantity that is solely dependent on the performance of the suspension system.
Human sense vibration through their visual, vestibular, somatic and auditory systems [
22]. For measuring ride comfort in the context of vehicle suspension, the frequency range of interest is between
to
as stated in
Section 2.1. As this is under the auditory threshold, the auditory system can be neglected in terms of suspension ride comfort, contrary to the field of noise, vibration and harshness. The mechanism of perception is still complex and there is a genuine difference between comfort and discomfort. According to Looze et al. [
23] comfort has not yet been clearly defined, and the exact relationship between comfort and discomfort is still subject to debate. One theory is that comfort and discomfort are independent factors, and so a reduction in discomfort will not automatically yield an increase in comfort [
24]. Furthermore, discomfort is a result of several factors, of which vibration is only one [
25] (p. 44). The automotive term ’ride comfort’ is therefore imprecise, because it is usually suspension vibration discomfort that is the subject of analysis. Other influences, such as noise, can still have an unwanted effect on the subjective rating of suspension vibration discomfort in real vehicles [
26].
There are three standards by which vibration discomfort is generally assessed, these being ISO 2631 [
27], BS 6841 [
28] and VDI 2057 [
29]. They all apply the same method of using acceleration measurements to calculate a weighted root mean square (RMS) acceleration comfort value. Weighting is performed in the frequency domain with factors representing the frequency sensitivity. RMS acceleration values for each direction are calculated from the weighted signals and combined to a discomfort value using directional weighting factors representing the directional sensitivity of human perception. VDI 2057 [
29] extends the method of ISO 2631 [
27] for vibration containing shocks, while BS 6841 [
28] uses slightly different frequency weighting factors. The authors performed a comparison of objectification methods for ride comfort. The results indicate, that the standardized methods are more robust and reliable than methods developed by other researchers [
9]. All of these methods have in common that they objectify the ride comfort (vibration discomfort) as perceived by an untrained customer. Development engineers specializing in vertical vehicle dynamics have a different perception because of their background knowledge. They try to identify such different vibration phenomena as wheel hop, engine shake and copying and then correlate them to different parts and systems of the car. An overview of subjective development criteria is given in [
30] (pp. 530–531).
2.3. Passive Suspension Systems
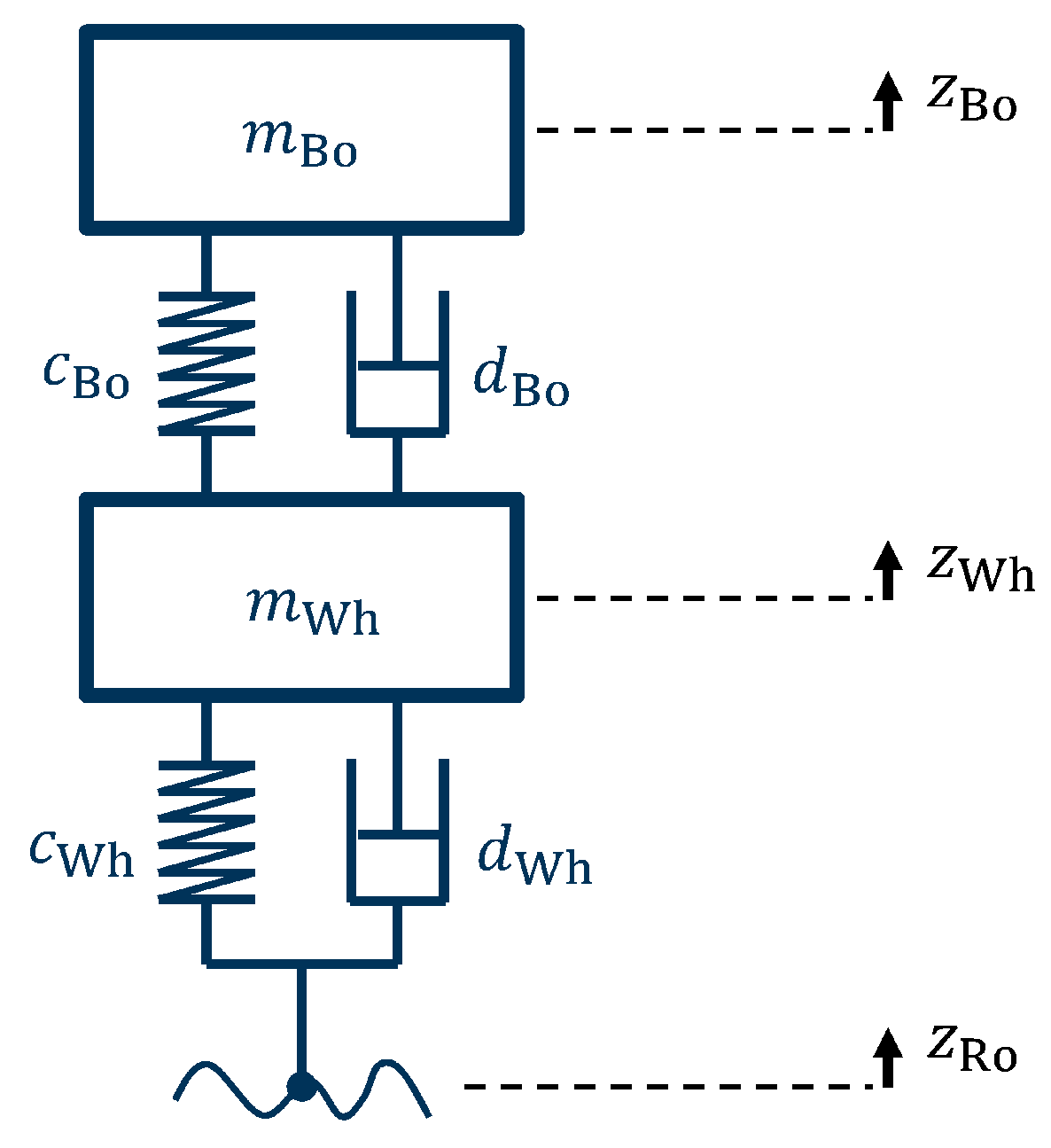
The quarter-vehicle model is used to describe the vertical dynamics of a passenger car. Here, the full vehicle is reduced to one corner and modeled as a two-mass spring-damper system, as illustrated in
Figure 1. The mass
represents the body,
the unsprung mass. The two are connected by a spring and a damper representing the suspension stiffness
and suspension damping
. The wheel and the road are also connected by a spring and a damper, where
is the tire stiffness and
the tire damping. The displacements of the two masses and the road-profile are defined as
,
and
. For a longitudinally symmetric vehicle, the quarter body mass is half of the corresponding axle weight, which itself depends on the front-to-rear weight distribution. The unsprung mass represents the mass of the wheel assembly. Tire stiffness is usually one magnitude higher than suspension stiffness, and tire damping is virtually negligible. The physical derivation of this model is described in [
30] (pp. 295–299). This model has only two degrees of freedom and cannot model the pitch and roll behavior of vehicles. However, it is sufficient for describing the essential vertical dynamic behavior of a vehicle, which is characterized by the objective conflict between ride comfort, suspension travel and road-holding [
31] (p. 112). The advantage of this model is its simplicity as a linear lumped parameter model, which makes it well suited to be used in control systems and for simulation purposes.
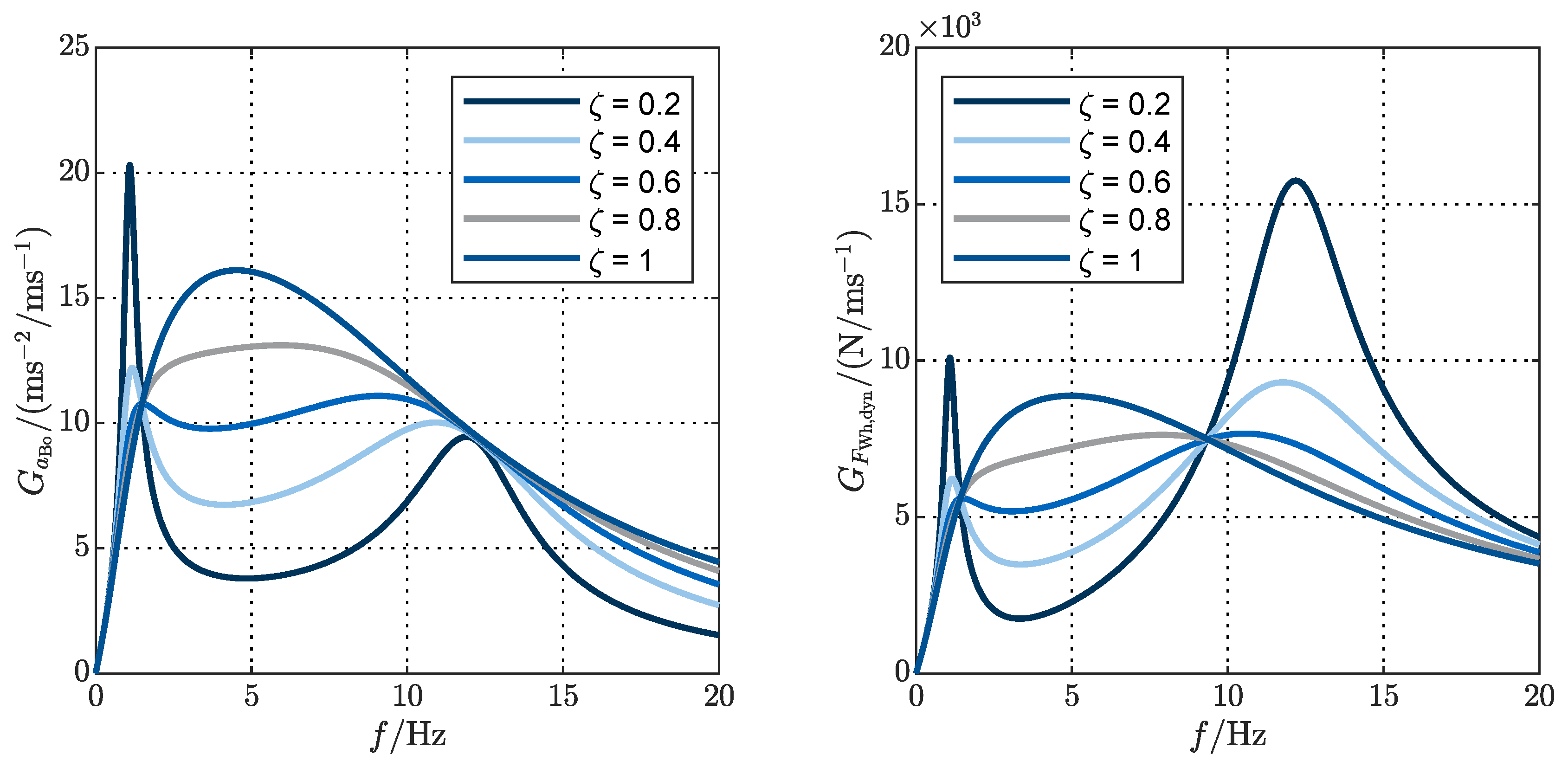
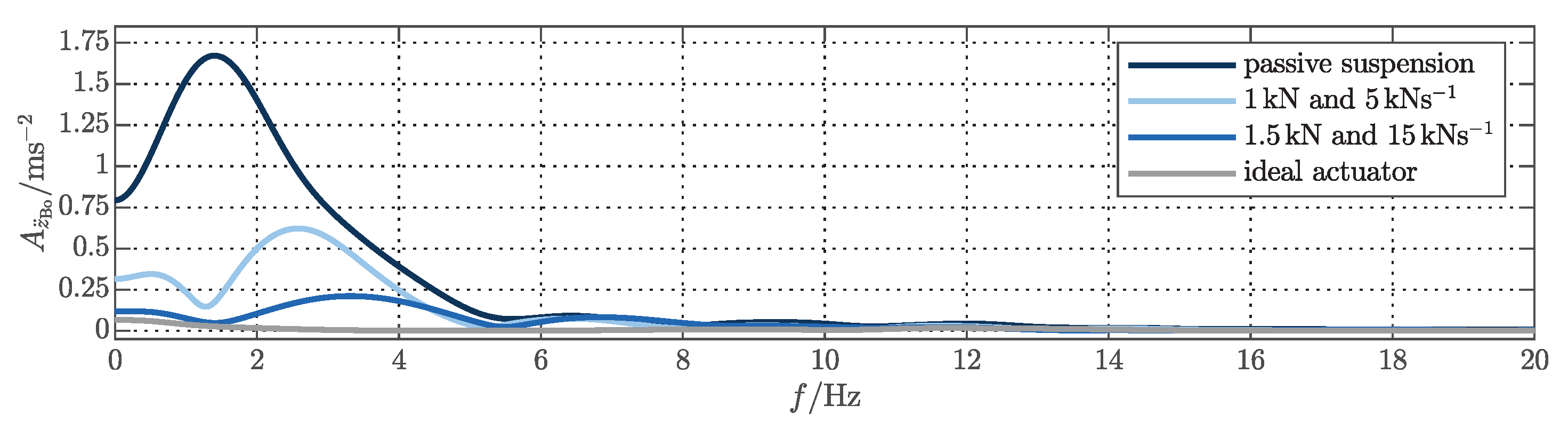
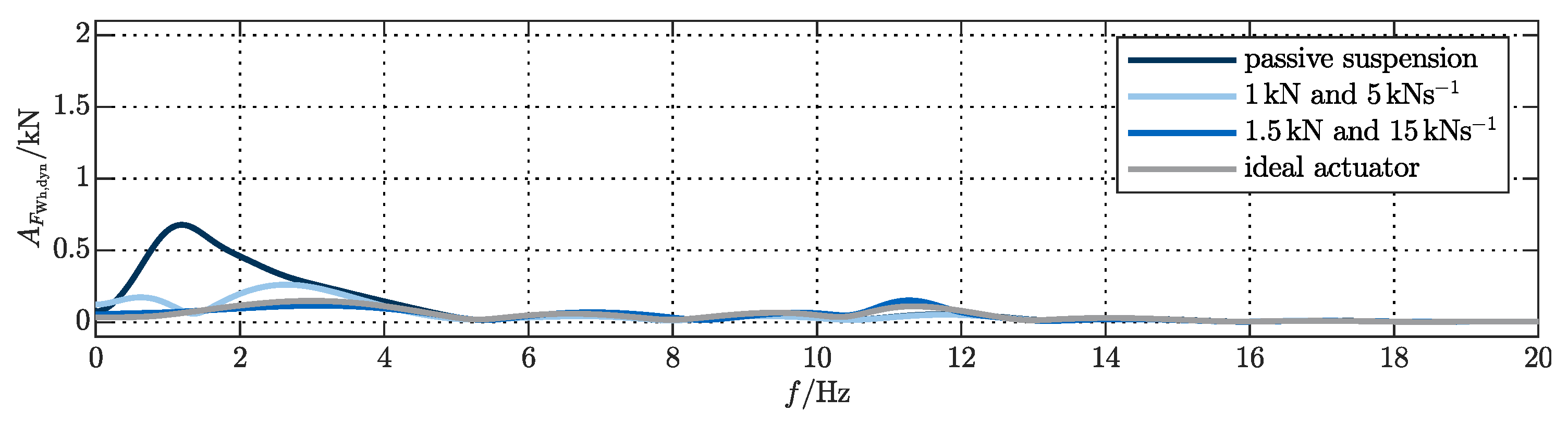
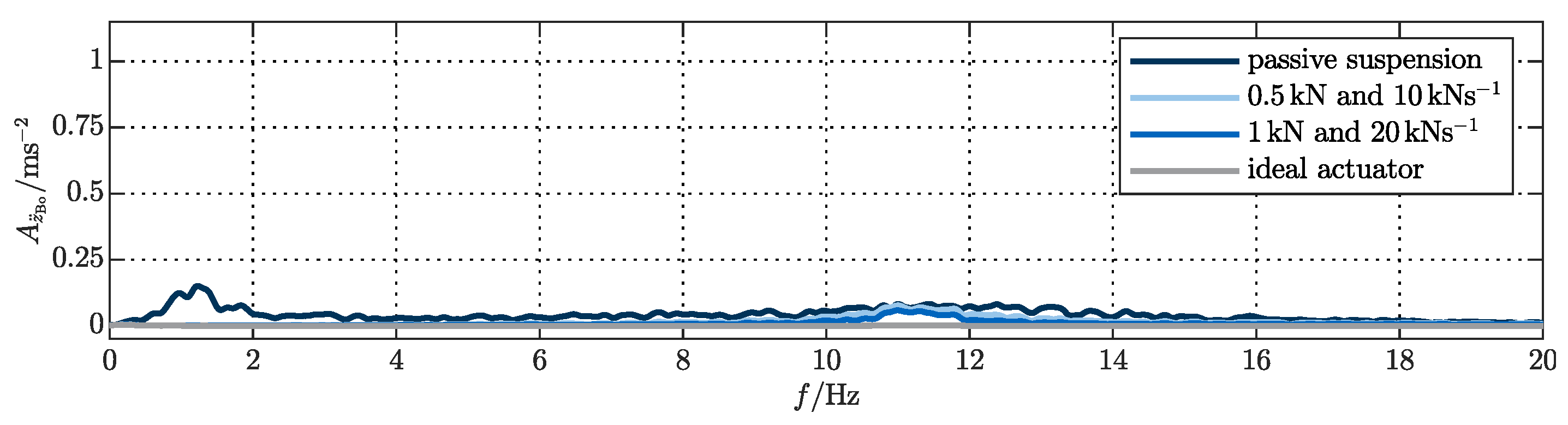
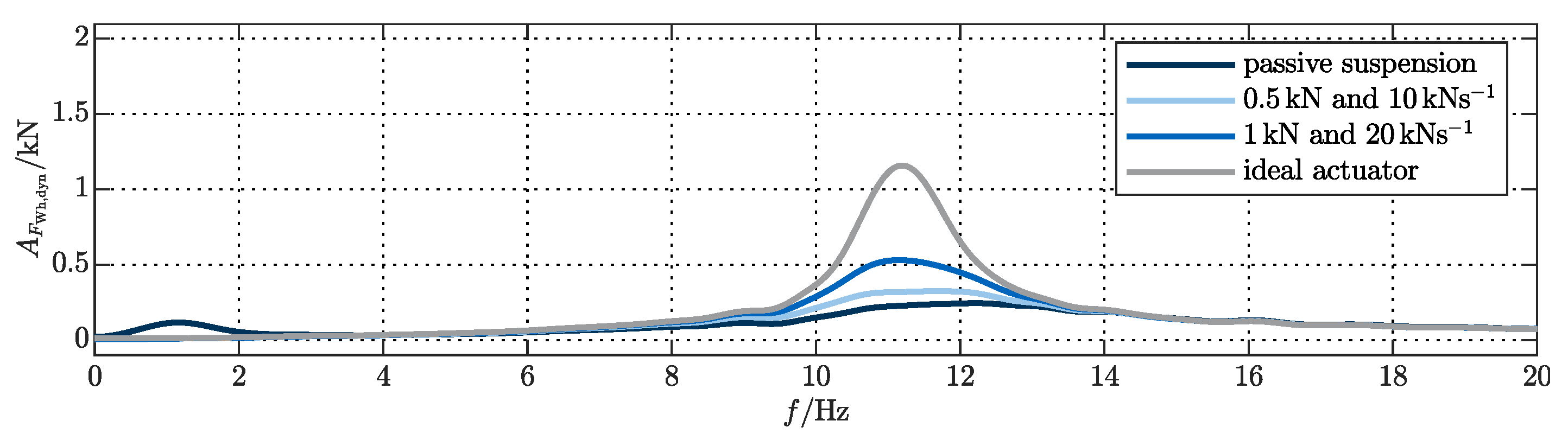
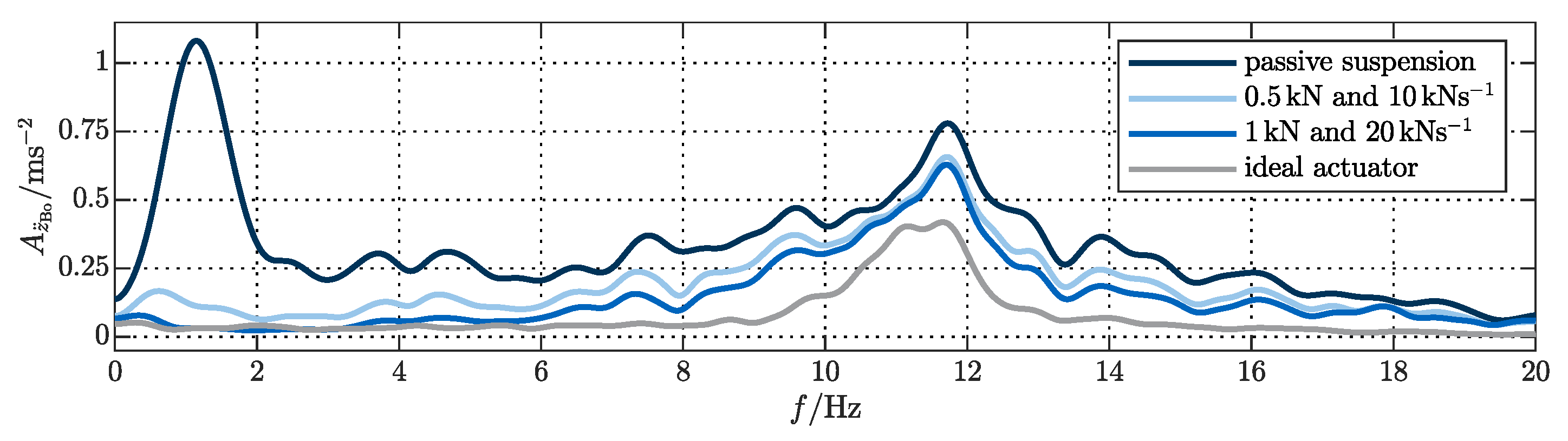
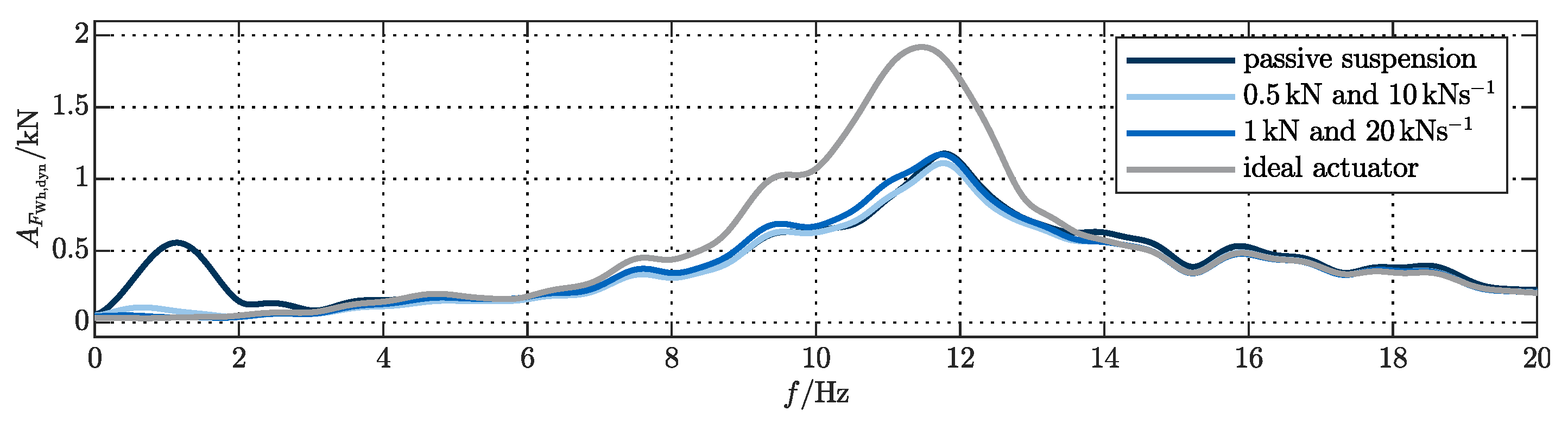
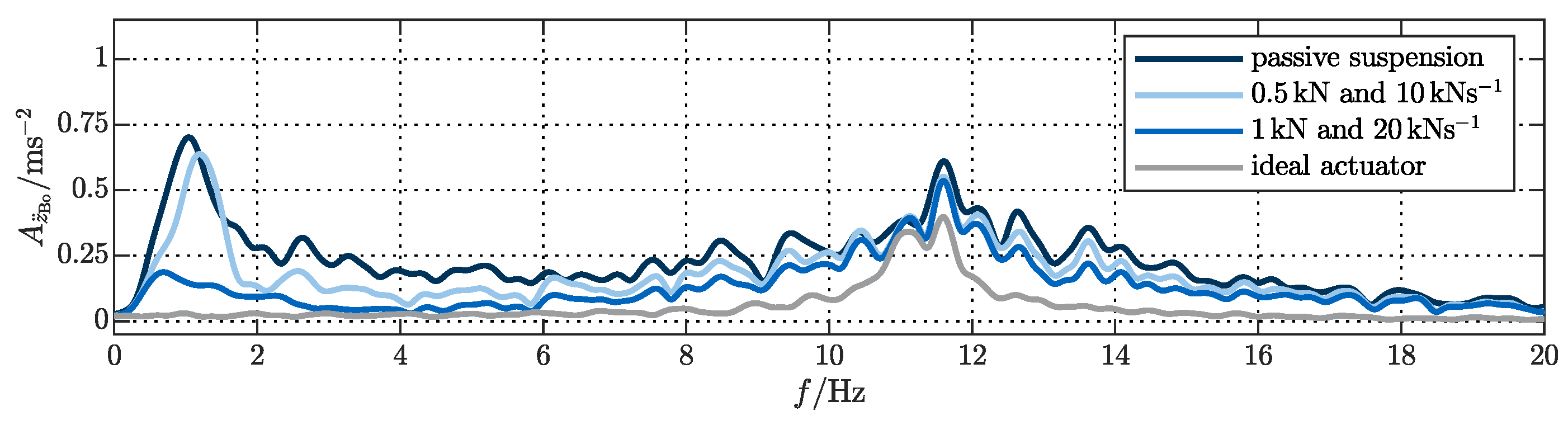
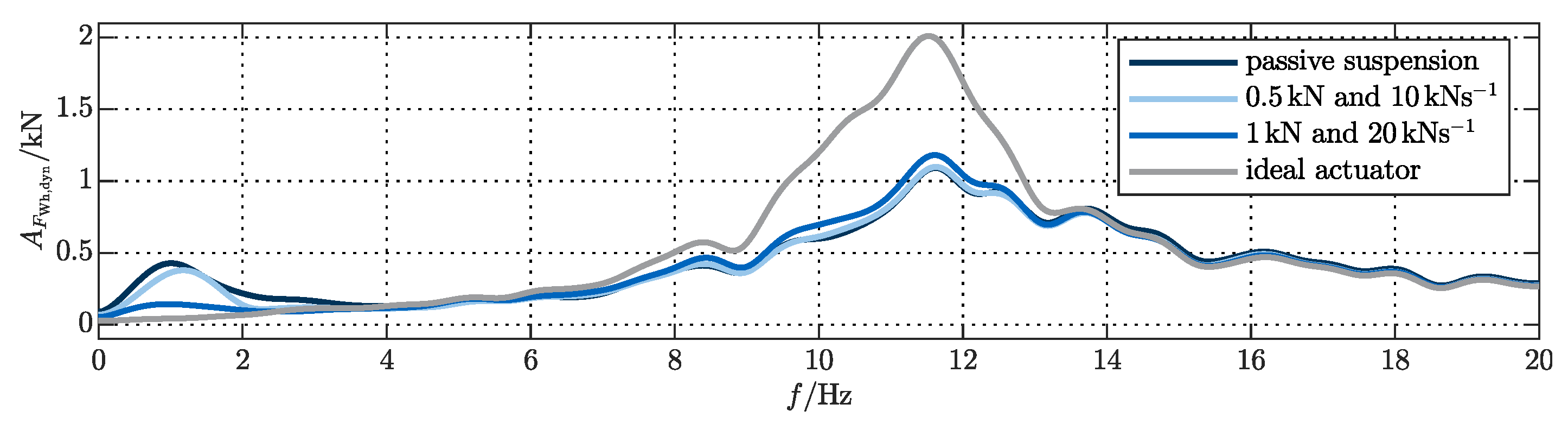
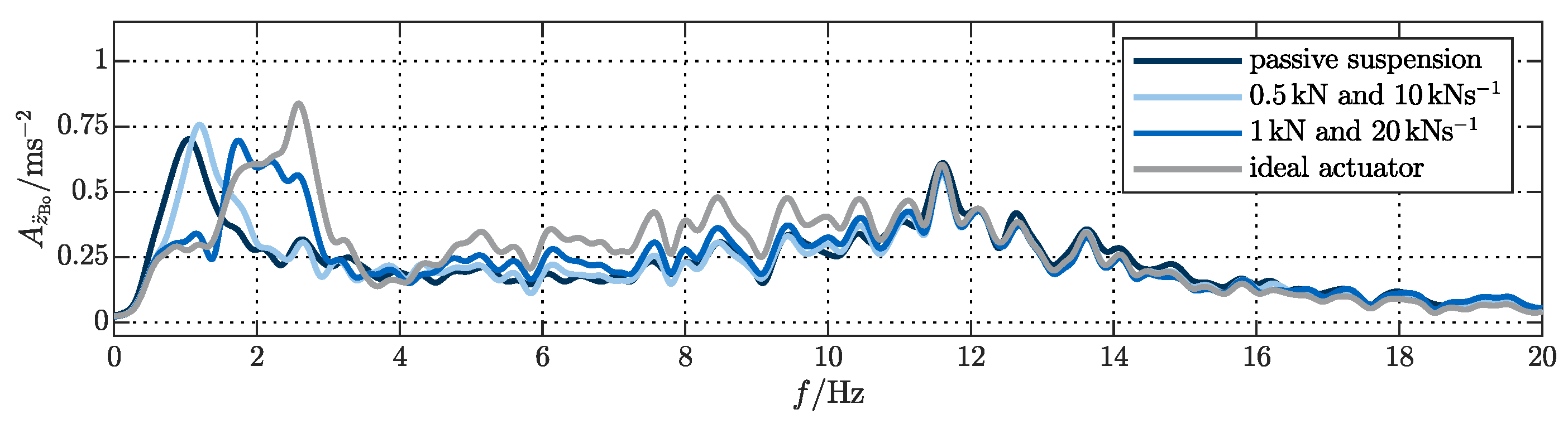
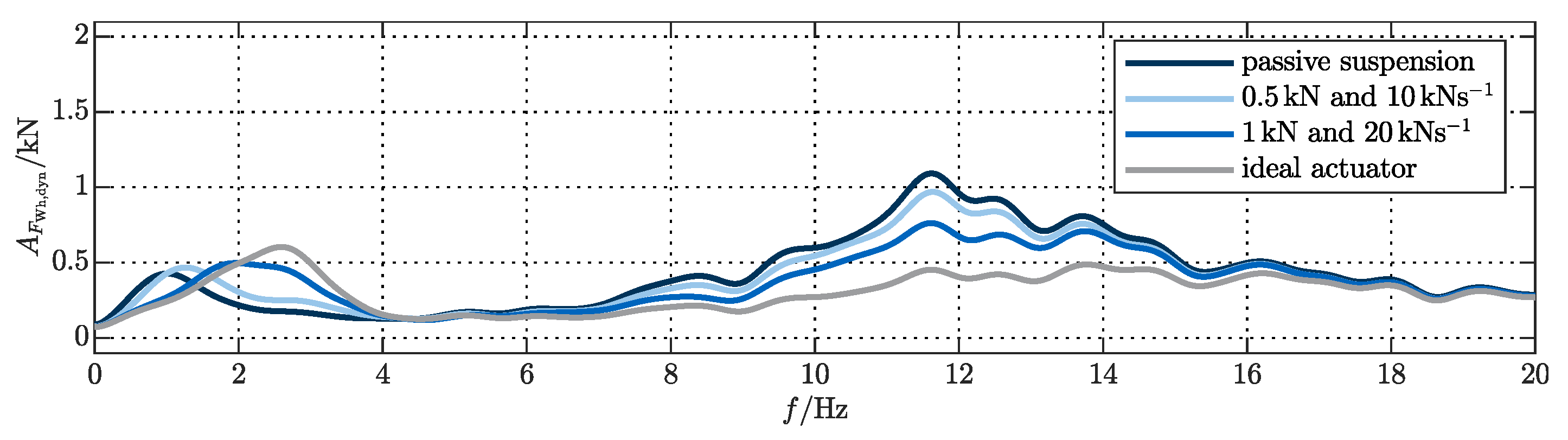
The conflict between ride comfort and road-holding is best described in the frequency domain.
Figure 2 shows the frequency response of a quarter-vehicle model in terms of dynamic wheel-load and body acceleration to road excitation for different suspension damping coefficients. The first peak of around
corresponds to the body eigenmode, the second peak around
to the wheel eigenmode. Low damping results in a high response amplitude of the body acceleration at the body eigenfrequency and low response amplitude between the invariant points [
32]. For high damping, the opposite applies. The response of the dynamic wheel-load with low damping is high at the body and the wheel eigenfrequencies. Because humans are sensitive to frequencies between
and
, it is desirable to have low suspension damping, but this results in high dynamic wheel-load variations, which in turn results in bad road-holding, because the side force potential of the tire decreases with increasing wheel-load variations. Higher damping would be beneficial for good road-holding, but this entails higher body accelerations and less ride comfort. Active systems can resolve this conflict but still have to find a balance between these objectives [
33] (p. 267).
2.4. Semi-Active and Active Suspension Control
To resolve the conflict between ride comfort and road-holding, a suitable control algorithm needs to be implemented that outputs the required forces, which in turn need to be supplied by the actuators. Suspension systems can be classified as, passive, slowly-variable/adaptive, semi-active and active systems [
34]. In the following, research on control strategies for semi-active and active systems will be summarized, including the application of model predictive control.
The first concept for the vertical dynamics control of active vehicle suspensions was developed by Karnopp [
35]. This approach was later extended to semi-active force generators [
36]. Ten years after the introduction of the skyhook principle, a modal control concept for fully active suspensions was developed by Wright and Williams [
20]. A comparison of SHC and LMC, as well as more information on each controller can be found in [
37]. Linear optimal control theory, developed by Anderson [
38], was also applied to vertical vehicle dynamics control [
39,
40,
41]. A thorough literature review on the application of LQ-optimal control can be found in [
42]. Another important research topic is the use of preview information for suspension control, which is investigated in [
43,
44,
45,
46]. Furthermore, model and parameter uncertainties can be incorporated by using
-control [
47,
48]. An example of adaptive non-linear control is given in [
49]. The skyhook control logic is extended to triple-skyhook control in [
50], while an alternative to the skyhook principle is acceleration-driven damping, which was developed by Savaresi et al. [
51,
52]. General summaries of control methods for semi-active suspensions can be found in [
53,
54] and for active suspensions in [
55]. An analytic derivation of performance constraints and limitations in vertical vehicle dynamics control is given in [
56].
The latest research in the field focuses on new signal differentiation methods [
57], improved vehicle stability control with active suspension systems [
58], optimal control application [
59,
60], preview strategies [
61,
62,
63], incorporating physiological and psychological effects [
64], adaptive controllers [
65,
66,
67,
68] and fault tolerant control [
69]. A multi-objective optimization method for semi-active suspensions is shown in [
70]. A non-linear controller considering actuator and state constraints is developed in [
71]. Actuator time delays are included in [
72,
73], while actuator dynamics are introduced in [
74,
75,
76]. Clipped optimal control for vehicle suspensions is presented in [
77]. Another way to incorporate system and actuator constrains is model predictive control.
Model predictive control (MPC) can be regarded as an advancement of optimal control. An overview of the history and industrial application of MPC is given in [
78]. The first application of MPC to vertical vehicle dynamics control of which the authors are aware is presented in [
79,
80]. Robust MPC [
81] and fast MPC [
82,
83] were applied later. A comparison of MPC to clipped optimal control is given in [
84]. One of the main problems of real-time MPC in vertical vehicle dynamics control is the requirement of optimization convergence within sampling times of 1–10 ms and the required quality of the road-profile preview. A recent implementation of MPC in low-bandwidth suspension systems is presented by Göhrle [
85,
86]. He also compares the performance of MPC to other control strategies [
61,
87] and shows different methods of road-profile estimation [
62]. For real-time capable implementations explicit MPC is used, as presented in [
88,
89,
90]. Other recent publications are focusing especially on MPC for semi-active suspension [
91,
92]. Fault estimation for electro-rheological semi-active dampers is present in [
93].
2.5. Research Gap
Recapitulating the previous sections, it is clear that a lot of effort has been invested in developing various kinds of control strategies for active and semi-active suspension systems. A number of different suspension actuators exist, and research has been carried out to understand actuator system properties and performance. However, the current state-of-the-art lacks information on the effect of actuator system properties, such as maximum force and maximum rate of change, on achievable ride comfort. This is not trivial to investigate, because the control system performance depends on actuator performance in conjunction with the performance of the control logic. To fill this research gap, the authors present a new method in this article, which makes it possible to quantify the effect of actuator limitations on achievable ride comfort, while assuring best possible control logic performance through the application of MPC. This approach allows to deduct the actuator characteristics required to achieve desired ride comfort targets and displays the sensitivity of ride comfort with respect to these actuator attributes. It shows the pure influence of the actuator properties for the best possible control input. To the best knowledge of the authors, no method and results comparable to this have previously been published in the literature.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


















