
Horse Jumping and Dressage Training Activity Detection Using Accelerometer Data

 ,
,  ,
,  ,
,  ,
,  , and
, and 
Abstract
:Simple Summary
Abstract
1. Introduction
2. Related Work
3. Materials and Methods
3.1. Animals and Activities
3.1.1. Dressage
- Halt: a stop of all movement with all four feet equally balanced underneath the horse.
- Gaits
- Walk: a four-beat gait with footfalls following one another.
- Trot: a two-beat diagonal gait where diagonal pairs of legs move forward simultaneously with a moment of suspension between each beat.
- Canter: a three-way gait that begins with the inner hind leg, goes to the front with the outer fore leg, then the inner foreleg, also known as the lead leg, and ends with a moment of suspension.
- Paces
- Collected: a gait in which the horse’s neck is raised and arched, and the hocks are well engaged but with shorter steps than the other paces.
- Working: a gait between the collected and extended trots.
- Extended: a gait where the horse lengthens the steps to their maximum length due to strong impulsion from the hindquarters.
- Variations on the Gaits
- Passage: a very collected trot characterized by high knee lifts and hock movement.
- Piaffe: a passage done on the spot.
- Flying change: a change of canter lead in one stride with front and hind legs changing simultaneously at every fourth, third, second or every stride.
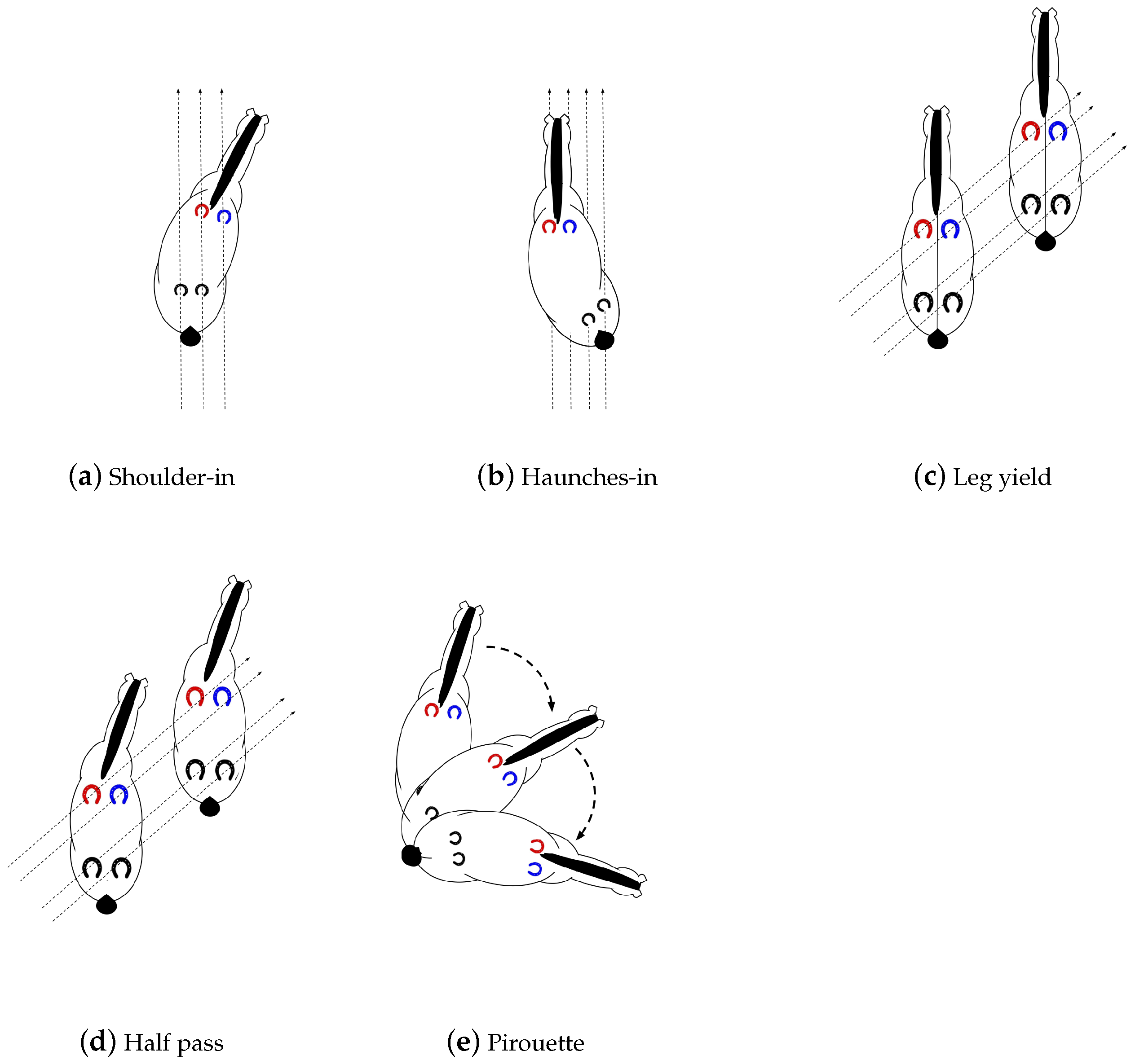
- Movements. Figure 1 shows the different movements.
- Shoulder-in: a three-track movement in collected trot where the horse bends around the inside leg of the rider, away from the movement direction. The inside front leg crosses over in front of the outside front leg, while the inside hind leg stays on the same track as the outside front leg.
- Haunches-in: a four-track movement in collected trot or canter where the horse bends around the inside leg of the rider, towards the movement direction. The front legs and shoulders remain on the original track.
- Leg yield: a lateral movement in working trot which a horse moves forward and sideways at the same time, with the inside legs crossing in front of the outside legs. The horse’s body is relatively straight or with a slight flexion of the poll away from the travel direction.
- Half pass: a leg-yield like movement but the horse is bent towards the direction of travel. The half pass is performed in collected trot or canter.
- Pirouette: a movement which is usually performed at the collected walk or canter where the horse’s forehand circles around the hind limbs while slightly bent in the direction of travel.
3.1.2. Jumping
3.2. Data Collection
3.3. Data Processing
3.4. Datasets
3.5. Classification Process and Feature Extraction
3.5.1. Activity Classification
3.5.2. Velocity Estimation
3.5.3. Pace Classification
3.6. Performance of the Classification
4. Results for Jumping
5. Results for Dressage
5.1. Phase 1: Activity Group
5.2. Phase 2: Effect of Side
5.3. Phase 3: Classification of Walk Movements
5.4. Phase 3: Classification of Trot Movements
Effect of Multiple Sensors
5.5. Phase 3: Classification of Canter Movements
5.6. Phase 4: Collected, Extended and Normal Gaits
5.6.1. Velocity Estimation
5.6.2. Decision Regions
5.6.3. Group Velocity Profile
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Visser, E.K.; Van Wijk-Jansen, E.E. Diversity in horse enthusiasts with respect to horse welfare: An explorative study. J. Vet. Behav. 2012, 7, 295–304. [Google Scholar] [CrossRef]
- Górecka-Bruzda, A.; Kosińska, I.; Jaworski, Z.; Jezierski, T.; Murphy, J. Conflict behavior in elite show jumping and dressage horses. J. Vet. Behav. 2015, 10, 137–146. [Google Scholar] [CrossRef]
- Munsters, C.C.; van Iwaarden, A.; van Weeren, R.; van Oldruitenborgh-Oosterbaan, M.M.S. Exercise testing in Warmblood sport horses under field conditions. Vet. J. 2014, 202, 11–19. [Google Scholar] [CrossRef] [PubMed]
- Clayton, H.M. Comparison of the collected, working, medium and extended canters. Equine Vet. J. 1994, 26, 16–19. [Google Scholar] [CrossRef]
- Casella, E.; Khamesi, A.R.; Silvestri, S. A framework for the recognition of horse gaits through wearable devices. Pervasive Mob. Comput. 2020, 67, 101213. [Google Scholar] [CrossRef]
- Maisonpierre, I.; Sutton, M.; Harris, P.; Menzies-Gow, N.; Weller, R.; Pfau, T. Accelerometer activity tracking in horses and the effect of pasture management on time budget. Equine Vet. J. 2019, 51, 840–845. [Google Scholar] [CrossRef] [PubMed]
- Bragança, F.S.; Broomé, S.; Rhodin, M.; Björnsdóttir, S.; Gunnarsson, V.; Voskamp, J.; Persson-Sjodin, E.; Back, W.; Lindgren, G.; Novoa-Bravo, M.; et al. Improving gait classification in horses by using inertial measurement unit (IMU) generated data and machine learning. Sci. Rep. 2020, 10, 17785. [Google Scholar] [CrossRef]
- Williams, J.; Perlo, M.; Marlin, D. A preliminary analysis of factors that result in faults in amateur (90–120 cm) showjumping. J. Equine Vet. Sci. 2019, 76, 59–60. [Google Scholar] [CrossRef]
- Clayton, H.M. Comparison of the stride kinematics of the collected, working, medium and extended trot in horses. Equine Vet. J. 1994, 26, 230–234. [Google Scholar] [CrossRef]
- Clayton, H.M. Classification of collected trot, passage and piaffe based on temporal variables. Equine Vet. J. 1997, 29, 54–57. [Google Scholar] [CrossRef]
- Eerdekens, A.; Deruyck, M.; Fontaine, J.; Martens, L.; De Poorter, E.; Joseph, W. Automatic equine activity detection by convolutional neural networks using accelerometer data. Comput. Electron. Agric. 2020, 168, 105139. [Google Scholar] [CrossRef]
- Williams, J.M. Electromyography in the horse: A useful technology? J. Equine Vet. Sci. 2018, 60, 43–58. [Google Scholar] [CrossRef]
- Prochno, H.C.; Barussi, F.M.; Bastos, F.Z.; Weber, S.H.; Bechara, G.H.; Rehan, I.F.; Michelotto, P.V. Infrared thermography applied to monitoring musculoskeletal adaptation to training in Thoroughbred race horses. J. Equine Vet. Sci. 2020, 87, 102935. [Google Scholar] [CrossRef]
- Eerdekens, A.; Deruyck, M.; Fontaine, J.; Martens, L.; De Poorter, E.; Plets, D.; Joseph, W. A framework for energy-efficient equine activity recognition with leg accelerometers. Comput. Electron. Agric. 2021, 183, 106020. [Google Scholar] [CrossRef]
- Burla, J.B.; Ostertag, A.; Westerath, H.S.; Hillmann, E. Gait determination and activity measurement in horses using an accelerometer. Comput. Electron. Agric. 2014, 102, 127–133. [Google Scholar] [CrossRef]
- Schmutz, A.; Chèze, L.; Jacques, J.; Martin, P. A method to estimate horse speed per stride from one IMU with a machine learning method. Sensors 2020, 20, 518. [Google Scholar] [CrossRef] [Green Version]
- Darbandi, H.; Serra Bragança, F.; Van der Zwaag, B.J.; Voskamp, J.; Gmel, A.I.; Haraldsdóttir, E.H.; Havinga, P. Using Different Combinations of Body-Mounted IMU Sensors to Estimate Speed of Horses—A Machine Learning Approach. Sensors 2021, 21, 798. [Google Scholar] [CrossRef]
- Schobesberger, H.; Peham, C. Computerized detection of supporting forelimb lameness in the horse using an artificial neural network. Vet. J. 2002, 163, 77–84. [Google Scholar] [CrossRef]
- Clayton, H.M. Comparison of the stride kinematics of the collected, medium, and extended walks in horses. Am. J. Vet. Res. 1995, 56, 849–852. [Google Scholar]
- Calvert, D.; Bajcar, E.; Stacey, D.; Thomason, J. Analysis of equine gait through strain measurement. In Proceedings of the 25th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (IEEE Cat. No. 03CH37439), Cancun, Mexico, 17–21 September 2003; Volume 3, pp. 2370–2373. [Google Scholar]
- Savelberg, H.; Van Loon, T.; Schamhardt, H. Ground reaction forces in horses, assessed from hoof wall deformation using artificial neural networks. Equine Vet. J. 1997, 29, 6–8. [Google Scholar] [CrossRef]
- Mouloodi, S.; Rahmanpanah, H.; Burvill, C.; Davies, H.M. Prediction of load in a long bone using an artificial neural network prediction algorithm. J. Mech. Behav. Biomed. Mater. 2020, 102, 103527. [Google Scholar] [CrossRef]
- Rahmanpanah, H.; Mouloodi, S.; Burvill, C.; Gohari, S.; Davies, H.M. Prediction of load-displacement curve in a complex structure using artificial neural networks: A study on a long bone. Int. J. Eng. Sci. 2020, 154, 103319. [Google Scholar] [CrossRef]
- GEOPAT. GEOPAT Polyflakes. 2021. Available online: https://www.geopat.be/en/geopat (accessed on 21 June 2021).
- Internationale, F.E. Dressage Rules 25th Edition. 2021. Available online: https://inside.fei.org/sites/default/files/FEI_Dressage_Rules_2021_Mark_Up_Version_1.pdf (accessed on 7 April 2021).
- Glossary. In Equine Behavior; McGreevy, P. (Ed.) W.B. Saunders: Oxford, UK, 2004; pp. 351–356. [Google Scholar] [CrossRef]
- Axivity. Axivity AX6 Accelerometer. 2019. Available online: https://axivity.com/files/resources/AX6_Data_Sheet.pdf (accessed on 7 April 2021).
- Max Planck Institute for Psycholinguistics. The Language Archive, N.T.N. ELAN. Available online: https://archive.mpi.nl/tla/elan (accessed on 15 March 2021).
- Brugman, H.; Russel, A.; Nijmegen, X. Annotating Multi-media/Multi-modal Resources with ELAN. In Proceedings of the LREC 2004 (Fourth International Conference on Language Resources and Evaluation), Lisbon, Portugal, 26–28 May 2004. [Google Scholar]
- Liebal, K.; Waller, B.M.; Slocombe, K.E.; Burrows, A.M. Primate Communication: A Multimodal Approach; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Jeong, C.Y.; Kim, M. An energy-efficient method for human activity recognition with segment-level change detection and deep learning. Sensors 2019, 19, 3688. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. Tensorflow: A system for large-scale machine learning. In Proceedings of the 12th USENIX Symposium on Operating Systems Design and Implementation (OSDI 16), Savannah, GA, USA, 2–4 November 2016; pp. 265–283. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Benaissa, S.; Tuyttens, F.A.; Plets, D.; Cattrysse, H.; Martens, L.; Vandaele, L.; Joseph, W.; Sonck, B. Classification of ingestive-related cow behaviours using RumiWatch halter and neck-mounted accelerometers. Appl. Anim. Behav. Sci. 2019, 211, 9–16. [Google Scholar] [CrossRef] [Green Version]
- Le Roux, S.P.; Marias, J.; Wolhuter, R.; Niesler, T. Animal-borne behaviour classification for sheep (Dohne Merino) and Rhinoceros (Ceratotherium simum and Diceros bicornis). Anim. Biotelemetry 2017, 5, 25. [Google Scholar] [CrossRef] [Green Version]
- Xing, H.; Li, J.; Hou, B.; Zhang, Y.; Guo, M. Pedestrian stride length estimation from IMU measurements and ANN based algorithm. J. Sens. 2017, 2017. [Google Scholar] [CrossRef] [Green Version]
- Tang, M.; Xia, L.; Wei, D.; Yan, S.; Du, C.; Cui, H.L. Distinguishing different cancerous human cells by raman spectroscopy based on discriminant analysis methods. Appl. Sci. 2017, 7, 900. [Google Scholar] [CrossRef]
- Ruuska, S.; Hämäläinen, W.; Kajava, S.; Mughal, M.; Matilainen, P.; Mononen, J. Evaluation of the confusion matrix method in the validation of an automated system for measuring feeding behaviour of cattle. Behav. Process. 2018, 148, 56–62. [Google Scholar] [CrossRef] [Green Version]
- Martini, A.; Rivola, A.; Troncossi, M. Autocorrelation analysis of vibro-acoustic signals measured in a test field for water leak detection. Appl. Sci. 2018, 8, 2450. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Goal | Number of Horses | Sensors | Classification Approach |
|---|---|---|---|---|
| [5] | Detection of walk, trot and canter | 2 | Accelerometer | NN, DT, k-NN and NB |
| [6] | Standing, grazing and ambulating | 6 | Accelerometer | Threshold based |
| [11,14] | Detection of stand, walk, trot, canter, roll, paw, flank-watching | 6 | Accelerometer | CNN |
| [15] | Detection of stand, walk, trot and canter | 20 | Accelerometer | Threshold based |
| [7] | Walk, trot, left canter, right canter, tölt, pace, trocha and paso fino | 120 | Accelerometer + gyroscope | LDA, QDA, DT, RF, SVM, NN and LSTM |
| [16] | Estimation of speed in canter | 58 | Accelerometer + gyroscope | SVM |
| [17] | Estimation of speed in walk, trot, tölt, pace and canter | 40 | Accelerometer + gyroscope | SVM, DT, RF, BT, GPR |
| [18] | Presence/absence and degree of lameness | 175 | Camera | NN |
| [4,9,19] | Detection of collected, working, medium and extended pace | 6 | Camera | Threshold based |
| [10] | Detection of trot, piaffe and passage | 10 | Camera | DA |
| [20] | Gait analysis | 35 | Strain gauge | NN |
| [21] | Hoof wall deformation to determine ground reaction forces | 1 | Strain gauge | NN |
| [22] | Prediction of load in long bone | 9 | Strain gauge | NN |
| [23] | Load-displacement in long bone | 13 | Strain gauge | NN |
| This paper | 6 jumping and 25 dressage training activities | 14 | Accelerometer | Hybrid CNN |
| Subject Number | Height at Withers (m) | Gender | Age | Equestrian Discipline | Level |
|---|---|---|---|---|---|
| 1 | 1.71 | Gelding | 8 | Dressage | Intermediair |
| 2 | 1.68 | Mare | 9 | Dressage | Intermediair |
| 3 | 1.68 | Mare | 7 | Dressage | Advanced Medium |
| 4 | 1.73 | Gelding | 7 | Dressage | Advanced Medium |
| 5 | 1.73 | Mare | 9 | Dressage | Intermediair |
| 6 | 1.80 | Gelding | 14 | Dressage | Grand Prix |
| 7 | 1.82 | Gelding | 11 | Dressage | Grand prix |
| 8 | 1.66 | Mare | 7 | Dressage | Preliminary |
| 9 | 1.46 | Mare | 9 | Dressage | Medium |
| 10 | 1.32 | Gelding | 9 | Dressage | Medium |
| 11 | 1.66 | Gelding | 11 | Dressage | Grand prix |
| 12 | 1.76 | Gelding | 8 | Jumping | 1.30 m |
| 13 | 1.71 | Gelding | 11 | Jumping | 1.50 m |
| 14 | 1.75 | Gelding | 7 | Jumping | 1.10 m |
| Equestrian Discipline | Activities | Horses | Proportion (%) | Samples | |||
|---|---|---|---|---|---|---|---|
| Dressage | Halt | 1, 2, 3, 4, 5, 11 | 7.56% | 16,175 | |||
| Walk | Walk paces | Walk paces | Collected walk | 2, 3, 4, 5, 7, 8, 9, 10, 11 | 3.70% | 7912 | |
| Working walk | 1, 2, 3, 4, 5, 7, 8, 9, 10, 11 | 22.70% | 48,565 | ||||
| Extended walk | 2, 3, 4, 7, 8, 9, 10, 11 | 4.69% | 10,035 | ||||
| Walk movements | Shoulder-in walk * | 5 | 0.63% | 1343 | |||
| Lateral walk movements | Haunches-in walk * | 3, 5 | 0.29% | 623 | |||
| Half pass walk * | 3, 5 | 0.75% | 1606 | ||||
| Pirouette walk | Pirouette walk | 2, 3, 4, 5, 11 | 1.24% | 2652 | |||
| Collected trot | 2, 3, 4, 5, 7, 8, 9, 10, 11 | 2.78% | 5947 | ||||
| Trot paces | Trot paces | Working trot | 1, 2, 3, 4, 5, 7, 8, 9, 10, 11 | 15.56% | 33,281 | ||
| Extended trot | 2, 3, 4, 5, 7, 8, 9, 10, 11 | 1.43% | 3059 | ||||
| Trot movements and variations | Variations on the trot gait | Passage | 2, 11 | 2.30% | 4927 | ||
| Trot | Piaffe | 11 | 0.56% | 1197 | |||
| Lateral trot movements | Shoulder-in trot | 2, 3, 4, 5, 11 | 2.96% | 6325 | |||
| Haunches-in trot | 2, 3, 4, 5, 11 | 2.46% | 5269 | ||||
| Leg yield trot | 3, 4 | 1.32% | 2814 | ||||
| Half-pass-trot | 2, 3, 4, 5, 11 | 2.72% | 5829 | ||||
| Canter | Collected canter | 1, 2, 3, 4, 7, 8, 9, 10, 11 | 3.19% | 6818 | |||
| Canter paces | Canter paces | Working canter | 1, 2, 3, 4, 5, 7, 8, 9, 10, 11 | 14.22% | 30,421 | ||
| Extended canter | 1, 2, 3, 4, 5, 7, 8, 9, 10, 11 | 1.88% | 4012 | ||||
| Flying change | Flying change | 1, 2, 3, 5, 11 | 2.06% | 4404 | |||
| Shoulder-in canter * | 2, 3 | 0.63% | 1337 | ||||
| Canter movements and variations | Lateral canter movements | Haunches-in canter | 2, 3, 4, 5 | 0.68% | 1447 | ||
| Half pass canter | 1, 2, 3, 4, 5, 11 | 1.25% | 2666 | ||||
| Pirouette canter | Pirouette canter | 1, 2, 3, 5 | 2.46% | 5254 | |||
| Jumping | Gaits | Walk | 12, 13, 14 | 29.56% | 46,835 | ||
| Trot | 12, 13, 14 | 24.98% | 39,581 | ||||
| Left canter | 12, 13, 14 | 20.07% | 31,800 | ||||
| Right canter | 12, 13, 14 | 18.36% | 29,091 | ||||
| Jumping movements | Flying change | 13,14 | 0.32% | 503 | |||
| Jump | 12, 13, 14 | 6.70% | 10,611 | ||||
| Mode 1 | Accuracy (%) | Mode 2 | Accuracy (%) | Mode 3 | Accuracy (%) | Mode 4 | Accuracy (%) | Mode 5 | Accuracy (%) |
|---|---|---|---|---|---|---|---|---|---|
| halt | 100% | halt | 100% | halt | 100% | halt | 100% | halt | 100% |
| collected-walk | 99.32% | ||||||||
| walk paces | 99.32% | walk paces | 99.32% | working-walk | 99.32% | ||||
| extended-walk | 86.91% | ||||||||
| walk superclass | 100% | walk superclass with side | 97.67% | walk movements | 100% | walk lateral movements | 100% | shoulder-in-walk | 69.35% |
| haunches-in-walk | 84.00% | ||||||||
| half-pass-walk | 100% | ||||||||
| pirouette-walk | 100% | pirouette-walk | 100% | ||||||
| collected-trot | 99.48% | ||||||||
| trot paces | 99.48% | trot paces | 99.48% | working-trot | 99.48% | ||||
| extended-trot | 99.48% | ||||||||
| trot movements | 97.04% | variations on the trot gait | 97.92% | passage | 97.92% | ||||
| trot superclass | 100% | trot superclass with side | 93.36% | piaffe | 89.02% | ||||
| trot lateral movements | 96.69% | shoulder-in-trot | 87.54% | ||||||
| haunches-in-trot | 71.60% | ||||||||
| leg-yield-trot | 78.25% | ||||||||
| half-pass-trot | 83.68% | ||||||||
| canter superclass | 100% | canter superclass with side | 100% | canter paces | 99.74% | canter paces | 99.74% | collected-canter | 99.74% |
| working-canter | 99.74% | ||||||||
| extended-canter | 99.74% | ||||||||
| canter movements | 97.61% | flying-change | 86.77% | flying-change | 86.77% | ||||
| canter lateral movements | 97.61% | shoulder-in-canter | 82.60% | ||||||
| haunches-in-canter | 79.02% | ||||||||
| half-pass-canter | 97.61% | ||||||||
| pirouette-canter | 97.61% | pirouette-canter | 97.61% | ||||||
| Overall accuracy (%) | 100% | 97.08% | 99.10% | 98.87% | 96.29% |
| Leg Accelerometers | Accuracy (%) |
|---|---|
| LF RF | 65.15% |
| LF LH | 72.73% |
| RF RH | 80.30% |
| LH RH | 77.27% |
| LF RH | 75.76% |
| RF LH | 84.85% |
| LF RF LH RH | 81.82% |
| Horse Type | Gait | Collected | Normal | Extended | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| (v) (m/s) | T (s) | (L) (m) | (v) (m/s) | T (s) | (L) (m) | (v) (m/s) | T (s) | (L) (m) | ||
| Pony | Walk | |||||||||
| Trot | ||||||||||
| Canter | ||||||||||
| Horse | Walk | |||||||||
| Trot | ||||||||||
| Canter | ||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eerdekens, A.; Deruyck, M.; Fontaine, J.; Damiaans, B.; Martens, L.; De Poorter, E.; Govaere, J.; Plets, D.; Joseph, W. Horse Jumping and Dressage Training Activity Detection Using Accelerometer Data. Animals 2021, 11, 2904. https://doi.org/10.3390/ani11102904
Eerdekens A, Deruyck M, Fontaine J, Damiaans B, Martens L, De Poorter E, Govaere J, Plets D, Joseph W. Horse Jumping and Dressage Training Activity Detection Using Accelerometer Data. Animals. 2021; 11(10):2904. https://doi.org/10.3390/ani11102904
Chicago/Turabian StyleEerdekens, Anniek, Margot Deruyck, Jaron Fontaine, Bert Damiaans, Luc Martens, Eli De Poorter, Jan Govaere, David Plets, and Wout Joseph. 2021. "Horse Jumping and Dressage Training Activity Detection Using Accelerometer Data" Animals 11, no. 10: 2904. https://doi.org/10.3390/ani11102904
APA StyleEerdekens, A., Deruyck, M., Fontaine, J., Damiaans, B., Martens, L., De Poorter, E., Govaere, J., Plets, D., & Joseph, W. (2021). Horse Jumping and Dressage Training Activity Detection Using Accelerometer Data. Animals, 11(10), 2904. https://doi.org/10.3390/ani11102904