
Why Is the Grass the Best Surface to Prevent Lameness? Integrative Analysis of Functional Ranges as a Key for Dairy Cows’ Welfare


Abstract
:Simple Summary
Abstract
1. Introduction
- (1)
- (2)
- (3)
- (4)
Flooring Types
- (1)
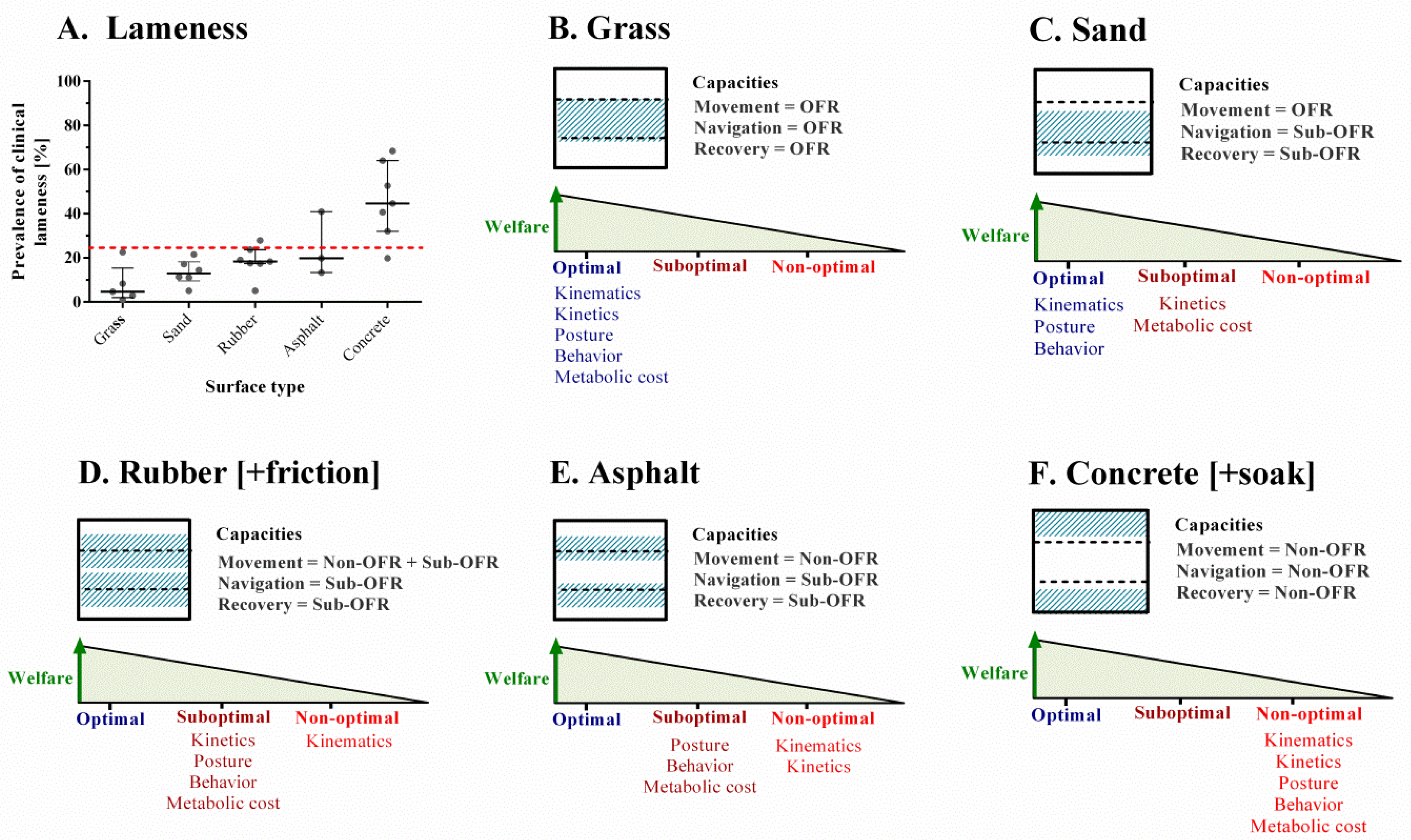
- Grass presents with a 1 to 22.5% prevalence [29,30,31], and it also reduces the clinical signs of lameness in affected animals, which are transferred to this substrate type [32]. This surface prevents sliding, while allowing the homogeneous distribution of the load in the cow’s feet [8,14]. However, pasture systems can expose cows’ feet to several infectious agents, and muddy conditions could affect the incidence or prevalence of lameness in pasture-based herds. Ranjbar et al. (2016) report that the average daily rainfall is a risk factor associated with the prevalence of lameness (odds ratio: 1.06; 95% confidence interval: 1.02 to 1.09) [23].
- (2)
- (3)
- Rubber has a 5 to 27.9% prevalence of lameness [35]. Its unfavorable characteristics under humid conditions make it a high-risk surface for injuries [10], but it does provide reasonably good mechanical load absorption [16]. Rubber flooring decreases slipping and the number of strides and it helps to alleviate pain and reduce wear on the feet.
- (4)
- (5)
- Concrete presents with a 19.8 to 68.4% prevalence of lameness. It is highly slippery under wet conditions, and when covered with slurry, it is abrasive. It is also the most rigid of all of the flooring types [9,22]. An animal’s wellbeing is under the worst possible condition with this type of flooring [9,13].
2. Materials and Methods
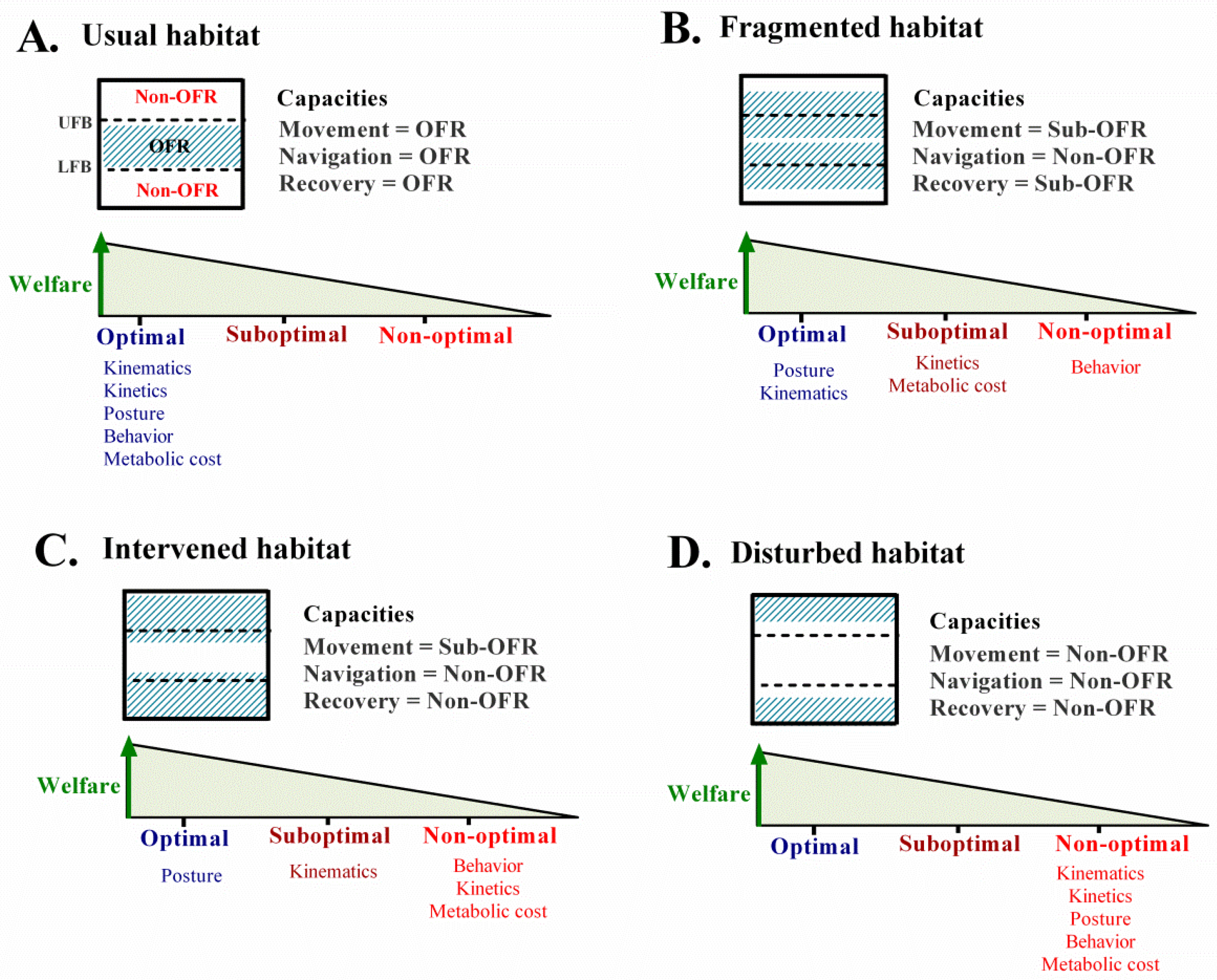
2.1. Integrating Parameters
2.2. Finding the Functional Ranges for the Movement Parameters in Dairy Cows
3. Results and Discussion
3.1. The Optimal Functional Ranges: Which Are the Movement Boundaries for Each Flooring Type?
3.1.1. Why Is the Grass the Best Surface to Prevent Bovine Lameness?
- Movement capacity: Two studies evaluated movement capacity using posture, kinetic, and kinematic parameters in grass [8,14]. Herlin and Drevemo (1997) determined the angle posture of the fore and hind limb while the animals were standing. They found a trend of narrow ranges in the proximal shoulder and hip joints (10°–30°), middle ranges in the elbow, stifle, carpus, and tarsus (40°–50°), and wide ranges in the distal fetlock (80°–100°) [8]. An optimal surface allows for movement in the joint surfaces during the resting posture of dairy cows, which provides lubrication and mechanical support for the joints [55]. Alsaaod et al. (2017) report a higher speed (1.2 m/s) and “confidence” of movement when considering the acceleration at the beginning (7.8 g) and at the end (2.4 g) of the support phase on grass compared to rubber surfaces and asphalt [14].
- Navigation capacity: Smid et al. (2018) [50] found that cows spent more time outdoors on the grass (90 ± 6%, n = 12) compared with sand surfaces (44 ± 6%, n =12). In addition, the grass was considered, together with sand, to be the most comfortable surface for a lying, resting posture, and it provides the comparative advantage of free grazing, which is associated with optimal wellbeing [50].
- Recovery capacity: The grass surface has a lower locomotion cost than artificial surfaces because it causes lower stress levels (253 ± 229 N/cm2) compared to hard surfaces (719 ± 631 N/cm2, n = 1) [16], and it allows for greater vertical acceleration of the hoof in the move towards a standing phase (7.8 ± 0.5 g vs. 6.8 ± 0.5 g, n = 24) [14]. This implies that, during the support to swing transition on the grass (the sequencing of the limbs’ forces during a redirection phase), the acceleration of the push-off is more efficient and timely (before the support of the rear limb), minimizing the collisional energy losses, which conserves kinetic energy by altering the direction of the center of mass velocity vector to match a more parallel push-up of the limb [56]. This mechanism conserves the energy of the center of mass, reducing the amount of work that an animal’s muscles must perform [57].
3.1.2. Sand Is the Best Alternative Natural Surface, but it Presents High Metabolic Cost and Management Challenges
- Navigation capacity: On a sand surface, only the stand-up/lie-down locomotive behavior of dairy cows is considered as an indicator of navigation capacity, because it answers the questions: when and where to move? [42]. Contrary to the normal condition found in the ME concept [42], the animals certainly are not really free to move wherever they want; indeed, they are kept in a closed environment. Therefore, most spatial distribution is led and controlled by the farmer, but even within this restriction, the animal still can decide to stand up or lie down. Sand surface presents, along with grass, the best conditions, having a longer time in a lying position posture (12.4 ± 7 h/day vs. rubber 10.7 ± 5 h/day, n = 208) and less time in a standing posture (11.5 ± 6 h/day vs. rubber 13.2 ± 6 h/day, n = 208) [61], as well as equivalent lying/standing time parameters to the grass “gold standard”. A greater time of lying behavior optimizes milk production through increases in the blood diffusion at the udder (around 5 L/min) compared with a standing animal (around 3 L/min), plasma concentration of the growth hormone, rumination frequency (reducing ruminal acidosis), and avoidance of chronic stress in the animal, according to the negative changes in the response of the hypothalamic–pituitary–adrenal axis [62,63,64]. The longest standing times are associated with the appearance of pedal pathologies, consequent of lameness [65,66].
- Recovery capacity: Sand is a substrate, which reduces the hoof output kinetics; hence, the animal requires a greater effort to break the inertia when walking. Dijkman and Lawrence (1997) [52] reported that the energy expenditure for the locomotive work of cattle and buffalo can be two times higher on incompetent substrates (i.e., mud) vs. concrete (3.34 J/m/kg vs. 1.69 J/m/kg, n = 6). This higher locomotion effort limits, in the long term, the capacity to travel long distances, because that requires greater muscle activation [44,54,57,67]. That situation triggers suboptimal ranges in kinematics and metabolic indicators (Figure 4C).
3.1.3. Rubber Is an Acceptable Artificial Surface, but the Friction Property Is a Notable Weakness
- Movement capacity: The increased friction did not affect limb posture during the support phase of the walking cycle [10]. Though, the speed appeared lower than that recorded on sand (1.01 ± 0.02 m/s vs. 1.12 ± 0.02 m/s, n = 36) [34] and also on grass (1.1 ± 0.01 m/s vs. 1.2 ± 0.01 m/s, n = 24) [14]. Although these differences were statistically different, in all cases, the speed exceeded the documented biological threshold (>0.97 m/s) [34]; in addition, the stride length presented an optimal functional range on all surfaces (Figures S3–S12). The optimal rubber friction range was 0.4 < μ < 0.5, but over the 0.5 value, speed decreased even more (0.81 ± 0.05 m/s vs. 0.85 ± 0.05 m/s, n = 5) [10]. The overall stress accumulation in the hoof was similar when walking on rubber to the one found on concrete [73]. In addition, the rubber registered lower acceleration magnitudes when unloading body weight on limbs than the ones registered in grass (6.2 ± 0.5 g vs. 7.8 ± 0.5 g, n = 24) [14]. This reflects how the cow´s gait behavior was being carried out under “Low Confidence”, as it is referred to in the literature. Surely, this unnatural feeling is produced by a proprioceptive reaction response to substrate competence (i.e., different mechanical properties) [67]. However, the step efficiency remained equivalent to the one observed on natural flooring types because the thoracic/pelvic foot overlap was found to be similar to sand (0.2 ± 1.5 cm vs. 1.7 ± 1.5 cm, n = 36) [34], and the stride length was greater than on concrete (1.55 ± 0.05 m vs. 1.4 ± 0.05 m, n = 645) and asphalt (1.55 ± 0.05 m vs. 1.48 ± 0.07 m, n = 645) [71].
- Navigation capacity: It was assessed through behavioral studies [24,27,62]. The lying time, as well as the frequency of postural transitions, was found to be higher than on concrete surfaces (12.3 ± 0.3 h/day vs. 10.4 ± 0.4 h/day, n = 16) [62]. However, it presented a suboptimal functional range for the slightly shorter time for lying (11.7 ± 0.2 h/day vs. 12.1 ± 0.2 h/day, n = 120), milking (2.6 ± 1 h/day vs. 3.2 ± 1 h/day, n = 120), feeding (4.1 ± 1 h/day vs. 4.7 ± 1 h/day, n = 120), and drinking (2.3 ± 0.5 h/day vs. 2.4 ± 0.5 h/day, n = 120), while showing a slightly higher standing time compared to sand (12.4 ± 4 h/day vs. 12 ± 3 h/day, n = 120) [24,27], Table 1 and Figures S6 and S12). From the biological point of view, these results guarantee a longer rumination time compared to hard and abrasive surfaces (i.e., asphalt and concrete) [53]. In addition, a functional range for welfare and production indicators was shared (Figures S6, S12 and Figure 4).
- Recovery capacity: The rubber friction property played a relevant role on locomotion. Faced with a low coefficient of friction, μ < 0.4, the gait becomes unstable, so the cow must increase cadence with a shorter stride length to maintain a certain speed [10] (Figure S4). The increase in friction generated an increased swing phase of the gait but decreased the accumulation of elastic potential energy to develop the next step [44,57]. Therefore, friction outside the optimal range generated a higher metabolic walking cost, and it was less safe.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Methodology | Main Findings | |||
|---|---|---|---|---|---|
| N | Between- Group Besign | Floor Types (Time) | Movement Parameters (Measurement Units) | ||
| [8] | 10 | Independent | Grass (4) vs. concrete (6).(30 weeks) | ROM at the shoulder, elbow, carpus, MCP, hip, knee, tarsus, and MTP (degrees). |
|
| [9] | 6 | Repeated | Soak increment on concrete: dry vs. wetted vs. shallow slurry vs. deep slurry.(2 weeks) | Speed (m/s), step length (m), and cadence (step/min). ROM at the elbow, carpus, MCP, knee, tarsus, and MTP (degrees). |
|
| [10] | 5 | Repeated | Friction (μ) increment on rubber: μ =0.33 vs. μ =0.74.(2 weeks) | Speed (m/s), step length (m), and cadence (step/min). ROM at the elbow, carpus, MCP, knee, tarsus, and MTP (degrees). |
|
| [13] | 30 | Repeated | Concrete (dry) vs. concrete (soak).(20 weeks) | Stride length (m), asymmetry for step width (m), asymmetry for step length (m), and overlap (m). |
|
| [14] | 24 | Repeated | Grass vs. rubber vs. asphalt.(48 weeks) | Speed (m/s), stride length (m), foot load, and toe-off confidence (g). |
|
| [16] | 1 | Repeated | Soft (rubber) vs. hard (concrete). | Stress total (N/cm2). (Dissected limb model) |
|
| [27] | 120 | Independent | Sand (60) vs. rubber (60).(52 weeks) | Time of lying, standing, milking, feeding, and drinking (hours/day). |
|
| [34] | 36 | Repeated | Sand vs. rubber vs. concrete(instant response, 10m walkways) | Speed (m/s), step length (m), stride length (m), and overlap (mm). |
|
| [61] | 208 | Independent | Sand (89) vs. rubber (119).(36 weeks) | Time of lying, standing, milking, feeding, and drinking (hours/day). |
|
| [71] | 645 | Independent | Rubber (193) vs. asphalt (239) vs. concrete (213).(24 weeks) | Stride length (m). |
|
| [72] | 40 | Repeated | Rubber vs. asphalt vs. concrete.(20 weeks) | Speed (m/s), stride length (m), and asymmetry for step length (m). |
|
| [73] | 45 | Independent | Rubber (16) vs. asphalt (16) vs. concrete (13).(27 weeks) | Pressure at the claw and foot (N/cm2). |
|
| [77] | 16 | Repeated | Rubber vs. concrete.(3 weeks) | Time of lying and standing (hours/day). Frequency of lying and standing (times/day). |
|
3.1.4. Asphalt Is a Harmful Surface: Highly Abrasive for the Hooves
- Movement capacity: The asphalt surface presented the lowest stress values at the hoof and foot compared to rubber (40 ± 2 N/cm2 vs. 57 ± 2 N/cm2, n = 16) and concrete (40 ± 2 N/cm2 vs. 66 ± 2 N/cm2, n = 13) [73]; in addition, a lower “confidence” was reported vs. grass, measured by the acceleration of the foot during the support phase (6.8 ± 0.5 g vs. 7.8 ± 0.5 g, n = 24) [14]. This situation can be explained by proprioceptive mechanisms, which trigger the animal to walk with greater caution and insecurity, decreasing speed (1.3 ± 0.5 m/s vs. 1.4 ± 0.5 m/s, n = 40) [14,72] and stride length (1.48 ± 0.05 m vs. 1.55 ± 0.05 m, n = 645) [71], in addition to increasing the variability in stride length (4.3 ± 0.5 cm vs. 4 ± 0.5 cm, n = 40) [72]. The data reported for the movement capacity, added to the high abrasive component, vs. rubber and concrete surfaces, modifying hooves conformation (reduced claw sole concavity), greater rates of claw wear (5.3 ± 0.3 mm/mo vs. rubber 1.4 ± 0.2 mm/mo vs. concrete 1.6 ± 0.3 mm/mo, n = 23), and lower claw net growth (−0.2 ± 0.4 mm/mo vs. rubber 2.5 ± 0.2 mm/mo vs. concrete 2.5 ± 0.4 mm/mo, n = 23) [12], supporting the inference that it is an uncomfortable surface for the cow.
- Navigation capacity: We can only hypothesize that cows may have a reduced lying time, and an increased standing time, since they were not directly recorded in the investigations found [62,63,64]. However, compared to rubber, a higher alteration of rumination times and milk production have been reported, which point to a suboptimal lying/standing time (7286 ± 1778 kg/cow/year vs. 7535 ± 745 kg/cow/year, n = 645) [71].
- Recovery capacity: When walking with greater caution, the metabolic cost is higher, since the optimal speed threshold would not be reached [44], negatively affecting the recovery capacity (Figure 4E). It would be interesting for future research to quantify the impact of this surface on the specific indicators of behavior and movement cost, in order to evaluate the magnitude of this impact.
3.1.5. Concrete Is a High Impact and the Most Damaging Surface
- Movement capacity: Concrete has been studied according to differences in soak range. Walking speed (0.65 ± 0.05 m/s vs. 0.81 ± 0.05 m/s, n = 6), stride length (1.6 ± 0.01 m vs. 1.7 ± 0.01 m, n = 30), and cadence (0.39 ± 0.05 steps/min vs. 0.58 ± 0.05 steps/min, n = 6) decreased as the floor soak increased [9,13]. These indicators favored the appearance of foot lesions, hemorrhages, dermatitis, and sole erosions, which present lameness as a functional consequence [74,75]. There is a high metabolic cost of locomotion, which makes them prone to pedal lesions given the repetitive mechanical impact over time. The posture was analyzed in two European studies developed in Holstein cows (Table 1). Suboptimal functional ranges compared to grass were observed on joint stiffness at the hip (198 ± 6° vs. 201 ± 4°, n = 17), metacarpo–phalangeal joint (60 ± 60° vs. 166 ± 60°, n = 17), and metatarso–phalangeal joint (171 ± 55 vs. 162 ± 48°, n = 6; 186 ± 24° vs. 183 ± 25°, n = 17) [8].
- Navigation capacity: The concrete surface registered the shortest lying down time (10.4 ± 0.4 h/day vs. 12.3 ± 0.3 h/day, n = 16) and longer standing up times (12.4 ± 4 h/day vs. 12 ± 3 h/day, n = 16) when compared to rubber surfaces [77]. These two behaviors negatively compromise the welfare and production indicators, due to the decrease in rumination time, increased lactic acid metabolism, stress, and high mechanical pressure on the hooves, which is sustained over time and is a potential risk for hoof integrity [53].
- Recovery capacity: Movement indicators suggest poor performance on a concrete surface, a situation that worsens with slippery floors (increased soak). A non-optimal functional range in the overlap feet parameter (37 ± 1 mm vs. 171 ± 1 mm, n = 36) [34], stride length (1.48 ± 0.07 m vs. 1.4 ± 0.05 m, n = 645) [71], and cadence (0.39 ± 0.05 steps/min vs. 0.58 ± 0.05 steps/min, n = 6) [9], and a suboptimal step length variability (3.4 ± 0.5 mm vs. 4.1 ± 0.4 mm, n = 40) [72]. These parameters cause a negative impact on joint health [51]. It is difficult to conserve the body and limbs’ mechanical energy, as well as their energy exchange between potential, kinetic, and elastic energies [57].
3.2. The Integrative Analysis of Functional Ranges Provides Directions for an Artificial Surface Engineering
3.2.1. Surface Material Properties
3.2.2. Desired Surface Design
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- The Bovine Genome Sequencing and Analysis Consortium; Elsik, C.G.; Tellam, R.L.; Worley, K.C.; Gibbs, R.A.; Muzny, D.M.; Weinstock, G.M.; Adelson, D.L.; Eichler, E.E.; Elnitski, L.; et al. The genome sequence of taurine cattle: A window to ruminant biology and evolution. Science 2009, 324, 522–528. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bollongino, R.; Burger, J.; Powell, A.; Mashkour, M.; Vigne, J.-D.; Thomas, M.G. Modern taurine cattle descended from small number of near-eastern founders. Mol. Biol. Evol. 2012, 29, 2101–2104. [Google Scholar] [CrossRef] [PubMed]
- Cow Milk Production Worldwide. 2020. Available online: https://www.statista.com/statistics/263952/production-of-milk-worldwide (accessed on 26 February 2021).
- Robinson, T.P.; Wint, G.R.W.; Conchedda, G.; Van Boeckel, T.P.; Ercoli, V.; Palamara, E.; Cinardi, G.; D’Aietti, L.; Hay, S.I.; Gilbert, M. Mapping the global distribution of livestock. PLoS ONE 2014, 9, e96084. [Google Scholar] [CrossRef] [Green Version]
- Willham, R.L. Keynote address at the 1985 annual meeting. A Highly Significant Facet of Our Livestock Heritage. J. Anim. Sci. 1986, 62, 1742–1758. [Google Scholar] [CrossRef]
- Whay, H.R.; Shearer, J.K. The impact of lameness on welfare of the dairy cow. Vet. Clin. N. Am. Food Anim. Pract. 2017, 33, 153–164. [Google Scholar] [CrossRef]
- Archer, S.C.; Green, M.J.; Huxley, J.N. Association between milk yield and serial locomotion score assessments in UK dairy cows. J. Dairy Sci. 2010, 93, 4045–4053. [Google Scholar] [CrossRef] [Green Version]
- Herlin, A.H.; Drevemo, S. Investigating locomotion of dairy cows by use of high speed cinematography. Equine Vet. J. Suppl. 1997, 29, 106–109. [Google Scholar] [CrossRef]
- Phillips, C.J.; Morris, I.D. The locomotion of dairy cows on concrete floors that are dry, wet, or covered with a slurry of excreta. J. Dairy Sci. 2000, 83, 1767–1772. [Google Scholar] [CrossRef]
- Phillips, C.J.; Morris, I.D. The locomotion of dairy cows on floor surfaces with different frictional properties. J. Dairy Sci. 2001, 84, 623–628. [Google Scholar] [CrossRef]
- Telezhenko, E. Measurement of spatial gait parameters from footprints of dairy cows. Animal 2009, 3, 1746–1753. [Google Scholar] [CrossRef] [Green Version]
- Telezhenko, E.; Bergsten, C.; Magnusson, M.; Nilsson, C. Effect of different flooring systems on claw conformation of dairy cows. J. Dairy Sci. 2009, 92, 2625–2633. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Van Nuffel, A.; Van De Gucht, T.; Saeys, W.; Sonck, B.; Opsomer, G.; Vangeyte, J.; Mertens, K.C.; De Ketelaere, B.; Van Weyenberg, S. Environmental and cow-related factors affect cow locomotion and can cause misclassification in lameness detection systems. Animal 2016, 10, 1533–1541. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alsaaod, M.; Huber, S.; Beer, G.; Kohler, P.; Schüpbach-Regula, G.; Steiner, A. Locomotion characteristics of dairy cows walking on pasture and the effect of artificial flooring systems on locomotion comfort. J. Dairy Sci. 2017, 100, 8330–8337. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schmid, T.; Weishaupt, M.A.; Meyer, S.W.; Waldern, N.; Peinen, K.; von Nuss, K. High-speed cinematographic evaluation of claw-ground contact pattern of lactating cows. Vet. J. 2009, 181, 151–157. [Google Scholar] [CrossRef] [PubMed]
- Hinterhofer, C.; Ferguson, J.C.; Apprich, V.; Haider, H.; Stanek, C. A finite element model of the bovine claw under static load for evaluation of different flooring conditions. N. Z. Vet. J. 2005, 53, 165–170. [Google Scholar] [CrossRef]
- Lidfors, L. The use of getting up and lying down movements in the evaluation of cattle environments. Vet. Res. Commun. 1989, 13, 307–324. [Google Scholar] [CrossRef]
- Gustafson, G.M.; Lund-Magnussen, E. Effect of daily exercise on the getting up and lying down behaviour of tied dairy cows. Prev. Vet. Med. 1995, 25, 27–36. [Google Scholar] [CrossRef]
- Turner, L.W.; Udal, M.C.; Larson, B.T.; Shearer, S.A. Monitoring cattle behavior and pasture use with GPS and GIS. Can. J. Anim. Sci. 2000, 80, 405–413. [Google Scholar] [CrossRef]
- Van Nuffel, A.; Zwertvaegher, I.; Pluym, L.; Van Weyenberg, S.; Thorup, V.M.; Pastell, M.; Sonck, B.; Saeys, W. Lameness detection in dairy cows: Part 1. How to distinguish between non-lame and lame cows based on differences in locomotion or behavior. Animals 2015, 5, 838–860. [Google Scholar] [CrossRef] [Green Version]
- Hettich, E.; Hinostroza, M.F.; van Schaik, G.; Tadich, N. Factores asociados a la presentación de cojeras en 50 rebaños lecheros de la X. Región, Chile. Arch. Med. Vet. 2007, 39, 247–253. [Google Scholar] [CrossRef]
- Solano, L.; Barkema, H.W.; Pajor, E.A.; Mason, S.; LeBlanc, S.J.; Heyerhoff, J.Z.; Nash, C.G.; Haley, D.B.; Vasseur, E.; Pellerin, D.; et al. Prevalence of lameness and associated risk factors in Canadian Holstein-Friesian cows housed in freestall barns. J. Dairy Sci. 2015, 98, 6978–6991. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ranjbar, S.; Rabiee, A.R.; Gunn, A.; House, J.K. Identifying risk factors associated with lameness in pasture-based dairy herds. J. Dairy Sci. 2016, 99, 7495–7505. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lesion, L.S. Koen og Kalven KvægKongres 2016. Available online: https://sp.landbrugsinfo.dk/Kvaeg/Dansk-Kvaeg-kongres/Sider/Bilag-KK-Nigel-B-Cook-02.pdf?download=true (accessed on 26 February 2021).
- Alsaaod, M.; Luternauer, M.; Hausegger, T.; Kredel, R.; Steiner, A. The cow pedogram-Analysis of gait cycle variables allows the detection of lameness and foot pathologies. J. Dairy Sci. 2017, 100, 1417–1426. [Google Scholar] [CrossRef] [Green Version]
- Noronha Filho, A.D.F.; Freitas, S.L.R.; Rodrigues, D.F.; Mendes, F.F.; Miguel, M.P.; Cunha, P.H.J.; Fioravanti, M.C.; Silva, L.A. Characterization of ruminal acidosis and initial phase of laminitis inducted by oligofructose in crossbred calves. Pesquisa Veterinária Brasileira 2019, 39, 99–106. [Google Scholar] [CrossRef] [Green Version]
- Cook, N.B.; Bennett, T.B.; Nordlund, K.V. Effect of free stall surface on daily activity patterns in dairy cows with relevance to lameness prevalence. J. Dairy Sci. 2004, 87, 2912–2922. [Google Scholar] [CrossRef] [Green Version]
- Franck, A.; De Belie, N. Concrete floor-bovine claw contact pressures related to floor roughness and deformation of the claw. J. Dairy Sci. 2006, 89, 2952–2964. [Google Scholar] [CrossRef] [Green Version]
- Frankena, K.; Somers, J.G.C.J.; Schouten, W.G.P.; van Stek, J.V.; Metz, J.H.M.; Stassen, E.N.; Graat, E.A. The effect of digital lesions and floor type on locomotion score in Dutch dairy cows. Prev. Vet. Med. 2009, 88, 150–157. [Google Scholar] [CrossRef]
- Somers, J.G.C.J.; Frankena, K.; Noordhuizen-Stassen, E.N.; Metz, J.H.M. Prevalence of claw disorders in Dutch dairy cows exposed to several floor systems. J. Dairy Sci. 2003, 86, 2082–2093. [Google Scholar] [CrossRef]
- Fabian, J.; Laven, R.A.; Whay, H.R. The prevalence of lameness on New Zealand dairy farms: A comparison of farmer estimate and locomotion scoring. Vet. J. 2014, 201, 31–38. [Google Scholar] [CrossRef]
- Hernández-Mendo, O.; von Keyserlingk, M.A.G.; Veira, D.M.; Weary, D.M. Effects of pasture on lameness in dairy cows. J. Dairy Sci. 2007, 90, 1209–1214. [Google Scholar] [CrossRef]
- Husfeldt, A.W.; Endres, M.I. Association between stall surface and some animal welfare measurements in freestall dairy herds using recycled manure solids for bedding. J. Dairy Sci. 2012, 95, 5626–5634. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Telezhenko, E.; Bergsten, C. Influence of floor type on the locomotion of dairy cows. Appl. Anim. Behav. Sci. 2005, 93, 183–197. [Google Scholar] [CrossRef]
- Rahman, M.A.; Imtiaz, M.A.; Ahaduzzaman, M.; Ghosh, K.K.; Masud, A.A.; Chowdhury, S.; Sikder, S. Effects of flooring and rearing system on hoof health of dairy cows in some selected areas of Bangladesh. Bangladesh J. Anim. Sci. 2014, 43, 132–137. [Google Scholar] [CrossRef] [Green Version]
- Salfer, J.A.; Siewert, J.M.; Endres, M.I. Housing, management characteristics, and factors associated with lameness, hock lesion, and hygiene of lactating dairy cattle on Upper Midwest United States dairy farms using automatic milking systems. J. Dairy Sci. 2018, 101, 8586–8594. [Google Scholar] [CrossRef]
- Thomsen, P.T.; Kjeldsen, A.M.; Sørensen, J.T.; Houe, H. Mortality (including euthanasia) among Danish dairy cows (1990–2001). Prev. Vet. Med. 2004, 62, 19–33. [Google Scholar] [CrossRef]
- Telezhenko, E.; Lidfors, L.; Bergsten, C. Dairy cow preferences for soft or hard flooring when standing or walking. J. Dairy Sci. 2007, 90, 3716–3724. [Google Scholar] [CrossRef]
- Nuss, K. The role of biomechanical factors in the development of sole ulcer in dairy cattle. In Proceedings of the Cattle Lameness Conference, Worcester, UK, 7 May 2014. [Google Scholar]
- Goossens, S.; Wybouw, N.; Van Leeuwen, T.; Bonte, D. The physiology of movement. Mov. Ecol. 2020, 8, 5. [Google Scholar] [CrossRef]
- Shaw, A.K. Causes and consequences of individual variation in animal movement. Mov. Ecol. 2020, 8, 12. [Google Scholar] [CrossRef] [Green Version]
- Nathan, R.; Getz, W.M.; Revilla, E.; Holyoak, M.; Kadmon, R.; Saltz, D.; Smouse, P.E. A movement ecology paradigm for unifying organismal movement research. Proc. Natl. Acad. Sci. USA 2008, 105, 19052–19059. [Google Scholar] [CrossRef] [Green Version]
- Schlägel, U.E.; Merrill, E.H.; Lewis, M.A. Territory surveillance and prey management: Wolves keep track of space and time. Ecol. Evol. 2017, 7, 8388–8405. [Google Scholar] [CrossRef] [Green Version]
- Alexander, R.M. Principles of Animal Locomotion; Princeton University Press: Princeton, NJ, USA, 2006. [Google Scholar]
- Zhao, K.; Jurdak, R. Understanding the spatiotemporal pattern of grazing cattle movement. Sci. Rep. 2016, 6, 1. [Google Scholar] [CrossRef]
- About Animal Welfare: OIE—World Organisation for Animal Health. 2008. Available online: https://www.oie.int/en/animal-welfare/animal-welfare-at-a-glance/ (accessed on 26 February 2021).
- Fraser, D.; Weary, D.M.; Pajor, E.A.; Milligan, B.N. A Scientific Conception of Animal Welfare that Reflects Ethical Concerns. 1997. Available online: https://www.wellbeingintlstudiesrepository.org/ethawel/1/ (accessed on 26 February 2021).
- von Keyserlingk, M.A.G.; Rushen, J.; de Passillé, A.M.; Weary, D.M. Invited review: The welfare of dairy cattle—Key concepts and the role of science. J. Dairy Sci. 2009, 92, 4101–4111. [Google Scholar] [CrossRef] [PubMed]
- Baguette, M.; Stevens, V.M.; Clobert, J. The pros and cons of applying the movement ecology paradigm for studying animal dispersal. Mov. Ecol. 2014, 2, 13. [Google Scholar] [CrossRef]
- Smid, A.-M.C.; Weary, D.M.; Costa, J.H.C.; von Keyserlingk, M.A.G. Dairy cow preference for different types of outdoor access. J. Dairy Sci. 2018, 101, 1448–1455. [Google Scholar] [CrossRef] [PubMed]
- Shepley, E.; Lensink, J.; Vasseur, E. Cow in Motion: A review of the impact of housing systems on movement opportunity of dairy cows and implications on locomotor activity. Appl. Anim. Behav. Sci. 2020, 230, 105026. [Google Scholar] [CrossRef]
- Dijkman, J.T.; Lawrence, P.R. The energy expenditure of cattle and buffaloes walking and working in different soil conditions. J. Agric. Sci. 1997, 128, 95–103. [Google Scholar] [CrossRef]
- van der Tol, P.P.J.; Metz, J.H.M.; Noordhuizen-Stassen, E.N.; Back, W.; Braam, C.R.; Weijs, W.A. The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 2003, 86, 2875–2883. [Google Scholar] [CrossRef]
- Shepard, E.L.C.; Wilson, R.P.; Rees, W.G.; Grundy, E.; Lambertucci, S.A.; Vosper, S.B. Energy landscapes shape animal movement ecology. Am. Nat. 2013, 182, 298–312. [Google Scholar] [CrossRef] [Green Version]
- Tamer, T.M. Hyaluronan and synovial joint: Function, distribution and healing. Interdiscip. Toxicol. 2013, 6, 111–125. [Google Scholar] [CrossRef]
- Ruina, A.; Bertram, J.E.A.; Srinivasan, M. A collisiona.al model of the energetic cost of support work qualitatively explains leg sequencing in walking and galloping, pseudo-elastic leg behavior in running and the walk-to-run transition. J. Theor. Biol. 2005, 237, 170–192. [Google Scholar] [CrossRef]
- Biewener, A.A. Patterns of mechanical energy change in tetrapod gait: Pendula, springs and work. J. Exp. Zool. Part A Comp. Exp. Biol. 2006, 305, 899–911. [Google Scholar] [CrossRef] [PubMed]
- Faye, B.; Lescourret, F. Environmental factors associated with lameness in dairy cattle. Prev. Vet. Med. 1989, 7, 267–287. [Google Scholar] [CrossRef]
- Frankena, K.; van Keulen, K.A.S.; Noordhuizen, J.P.; Noordhuizen-Straasen, E.N.; Gundelach, J.; de Jong, D.-J.; Saedt, I. A cross-sectional study into prevalence and risk indicators of digital haemorrhages in female dairy calves. Prev. Vet. Med. 1992, 14, 1–12. [Google Scholar] [CrossRef]
- Telezhenko, E. Effect of Flooring System on Locomotion Comfort in Dairy Cows. Ph.D. Thesis, Sveriges Lantbruksuniversitet, Acta Universitatis Agriculturae Sueciae, Skara, Sweden, 2007; pp. 1652–6880. Available online: https://pub.epsilon.slu.se/1558/ (accessed on 15 January 2022).
- Cook, N.B. Free-Stall Design for Maximum Cow Comfort. Available online: http://haasnutrition.com/wp-content/uploads/2015/09/FreeStallDesign-cook.pdf (accessed on 9 March 2021).
- Haley, D.B.; Rushen, J.; de Passillé, A.M. Behavioural indicators of cow comfort: Activity and resting behaviour of dairy cows in two types of housing. Can. J. Anim. Sci. 2000, 80, 257–263. [Google Scholar] [CrossRef]
- Lovarelli, D.; Tamburini, A.; Mattachini, G.; Zucali, M.; Riva, E.; Provolo, G.; Guarino, M. Relating lying behavior with climate, body condition score, and milk production in dairy cows. Front. Vet. Sci. 2020, 7, 565415. [Google Scholar] [CrossRef]
- Temple, D.; Bargo, F.; Mainau, E.; Ipharraguerre, I.; Manteca, X. Lying Behaviour and Performances in Dairy Cattle—Practical case. Fawec.org. Available online: https://www.fawec.org/media/com_lazypdf/pdf/Fact_Sheet_FAWEC15_n15_efficiency_comfort_en.pdf (accessed on 9 March 2021).
- Olechnowicz, J.; Jaskowski, J.M. Behaviour of lame cows: A review. Vet. Med. 2011, 56, 581–588. [Google Scholar] [CrossRef] [Green Version]
- Vermunt, J.J.; Greenough, P.R. Predisposing factors of laminitis in cattle. Br. Vet. J. 1994, 150, 151–164. [Google Scholar] [CrossRef]
- Gatesy, S. Direct and indirect track features: What sediment did a dinosaur touch? Ichnos 2003, 10, 91–98. [Google Scholar] [CrossRef]
- Cook, N.B. Prevalence of lameness among dairy cattle in Wisconsin as a function of housing type and stall surface. J. Am. Vet. Med. Assoc. 2003, 223, 1324–1328. [Google Scholar] [CrossRef]
- Vokey, F.J.; Guard, C.L.; Erb, H.N.; Galton, D.M. Effects of alley and stall surfaces on indices of claw and leg health in dairy cattle housed in a free-stall barn. J. Dairy Sci. 2001, 84, 2686–2699. [Google Scholar] [CrossRef]
- Espejo, L.A.; Endres, M.I.; Salfer, J.A. Prevalence of lameness in high-producing holstein cows housed in freestall barns in Minnesota. J. Dairy Sci. 2006, 89, 3052–3058. [Google Scholar] [CrossRef] [Green Version]
- Haufe, H.C.; Gygax, L.; Steiner, B.; Friedli, K.; Stauffacher, M.; Wechsler, B. Influence of floor type in the walking area of cubicle housing systems on the behaviour of dairy cows. Appl. Anim. Behav. Sci. 2009, 116, 21–27. [Google Scholar] [CrossRef]
- Telezhenko, E.; Magnusson, M.; Bergsten, C. Gait of dairy cows on floors with different slipperiness. J. Dairy Sci. 2017, 100, 6494–6503. [Google Scholar] [CrossRef] [PubMed]
- Telezhenko, E.; Bergsten, C.; Magnusson, M.; Ventorp, M.; Nilsson, C. Effect of different flooring systems on weight and pressure distribution on claws of dairy cows. J. Dairy Sci. 2008, 91, 1874–1884. [Google Scholar] [CrossRef] [Green Version]
- Cramer, G. Quantification of Foot Lesions and an Evaluation of Early Detection Methods for Lameness in Ontario Dairy Farms. 2007. Available online: https://atrium.lib.uoguelph.ca/xmlui/handle/10214/20472 (accessed on 9 March 2021).
- Cook, N.B.; Hess, J.P.; Foy, M.R.; Bennett, T.B.; Brotzman, R.L. Management characteristics, lameness, and body injuries of dairy cattle housed in high-performance dairy herds in Wisconsin. J. Dairy Sci. 2016, 99, 5879–5891. [Google Scholar] [CrossRef] [Green Version]
- Buijs, S.; Scoley, G.; McConnell, D. Artificial grass as an alternative laneway surface for dairy cows walking to pasture. Animals 2019, 9, 891. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Haley, D.B.; de Passillé, A.M.; Rushen, J. Assessing cow comfort: Effects of two floor types and two tie stall designs on the behaviour of lactating dairy cows. Appl. Anim. Behav. Sci. 2001, 71, 105–117. [Google Scholar] [CrossRef]
- Hogan, J.S.; Smith, K.L.; Hoblet, K.H.; Todhunter, D.A.; Schoenberger, P.S.; Hueston, W.D.; Pritchard, D.E.; Bowman, G.L.; Heider, L.E.; Brockett, B.L.; et al. Bacterial counts in bedding materials used on nine commercial dairies. J. Dairy Sci. 1989, 72, 250–258. [Google Scholar] [CrossRef]
- Ruunaniemi, J.; Hautala, M.; Ahokas, J. Physical properties of synthetic bedding materials for free-stall dairy cow. Agric. Food Sci. 2008, 14, 134. [Google Scholar] [CrossRef] [Green Version]
- van der Tol, P.P.J.; Metz, J.H.M.; Noordhuizen-Stassen, E.N.; Back, W.; Braam, C.R.; Weijs, W.A. Frictional forces required for unrestrained locomotion in dairy cattle. J. Dairy Sci. 2005, 88, 615–624. [Google Scholar] [CrossRef]
- Polsky, L.; von Keyserlingk, M.A.G. Invited review: Effects of heat stress on dairy cattle welfare. J. Dairy Sci. 2017, 100, 8645–8657. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Määttä, J.; Kuisma, R.; Kymäläinen, H.-R. Cleanability of synthetic mats for use in cattle barns. Biosyst. Eng. 2010, 107, 372–376. [Google Scholar] [CrossRef]
- Bisi, M.C.; Stagni, R. Changes of human movement complexity during maturation: Quantitative assessment using multiscale entropy. Comput. Methods Biomech. Biomed. Engin. 2018, 21, 325–331. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Xu, N.; Jiang, A. Tortuosity entropy: A measure of spatial complexity of behavioral changes in animal movement. J. Theor. Biol. 2015, 364, 197–205. [Google Scholar] [CrossRef] [PubMed]
- Codling, E.A.; Plank, M.J.; Benhamou, S. Random walk models in biology. J. R. Soc. Interface 2008, 5, 813–834. [Google Scholar] [CrossRef] [PubMed]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Medina-González, P.; Moreno, K.; Gómez, M. Why Is the Grass the Best Surface to Prevent Lameness? Integrative Analysis of Functional Ranges as a Key for Dairy Cows’ Welfare. Animals 2022, 12, 496. https://doi.org/10.3390/ani12040496
Medina-González P, Moreno K, Gómez M. Why Is the Grass the Best Surface to Prevent Lameness? Integrative Analysis of Functional Ranges as a Key for Dairy Cows’ Welfare. Animals. 2022; 12(4):496. https://doi.org/10.3390/ani12040496
Chicago/Turabian StyleMedina-González, Paul, Karen Moreno, and Marcelo Gómez. 2022. "Why Is the Grass the Best Surface to Prevent Lameness? Integrative Analysis of Functional Ranges as a Key for Dairy Cows’ Welfare" Animals 12, no. 4: 496. https://doi.org/10.3390/ani12040496