Let us consider a duopoly market. Let the two firms produce qualities from the set and the second firm can produce qualities from the set , where and are nonempty subsets of a complete metric space . Any of the firms can produce a bundle of products . Assumption 1 ensures the existence and uniqueness of the production bundles of n-goods, that present the equilibrium in a duopoly economy.
4.2.1. A Linear Case, When Each Player Is Producing a Single Product, Goods Being Perfect Substitutes
Let us consider a market with two competing firms, each firm producing just one product, and both goods are perfect substitutes. Let the two firms produce quantities and , respectively, where and be the complete metric space . Let us consider the response functions of player one and player two , where
- (1)
, , ,
- (2)
and
- (3)
D can be defined in three ways:
- (3a)
, provided that
- (3b)
, provided that and
- (3c)
It is easy to check that , and .
Indeed let us consider case (3a). From the assumptions that
we get
and
Therefore
,
and
.
It can be proven in a similar fashion that and for the cases (3b) and (3c).
From the inequalities
and
it follows that
and thus the ordered pair
satisfies Assumption 1 with constants
,
,
,
, because
. Consequently there exists an equilibrium pair
and for any initial start in the economy the iterated sequences
converge to the market equilibrium
. The equilibrium pair is
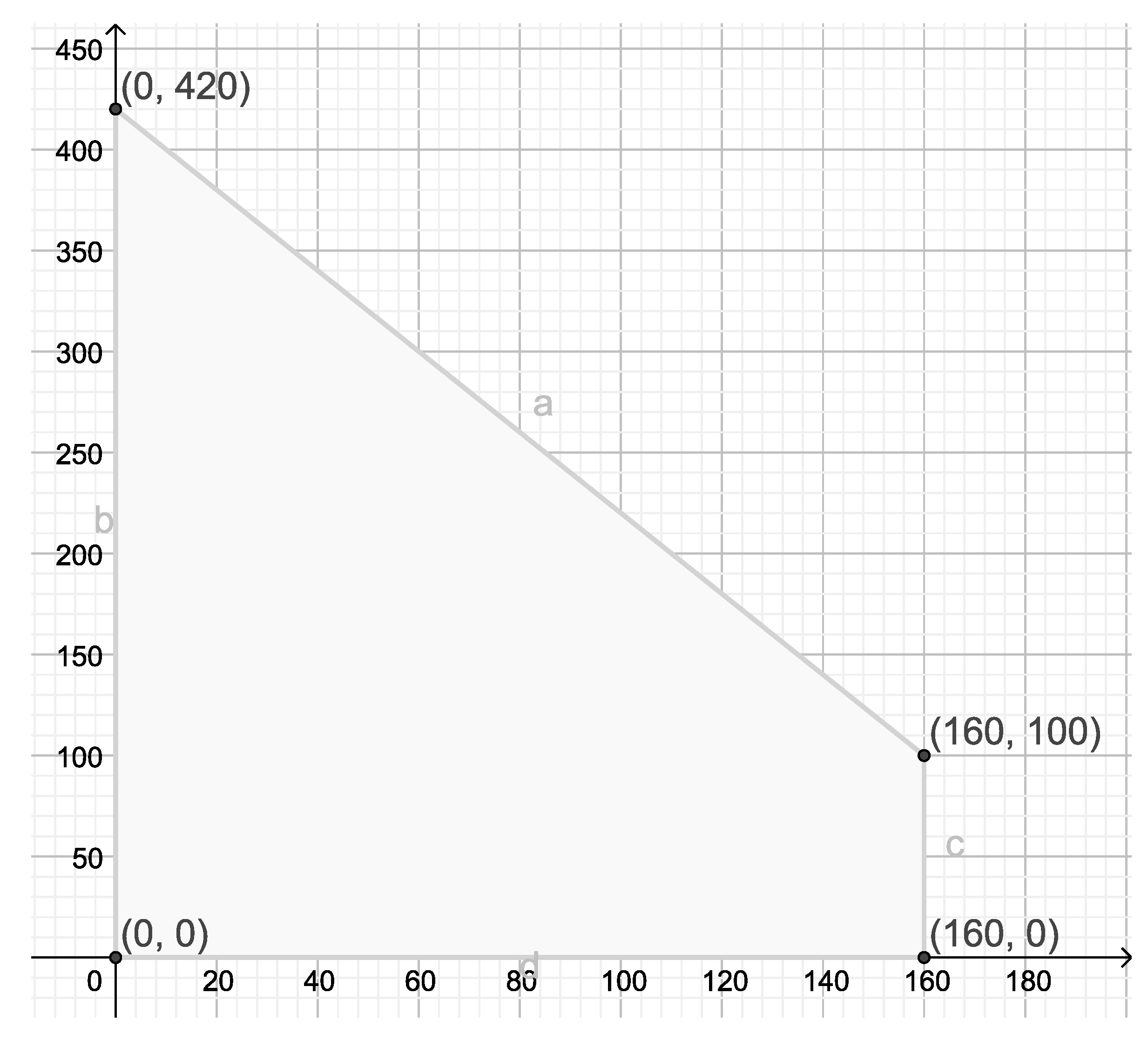
Let us consider a particular case: , , , , , , .
Values selected for this case are arbitrarily chosen with only general conditions in mind. However, in an actual situation the values of p, q, and reflect the actual management and marketing policy of the market participants.
In this case
,
,
,
. The subset
D can be considered either
(3a) or
(3c) (see
Figure 1).
We get in this case that the equilibrium pair of the production of the two firms is
and the total production will be
. Values of the iterated sequence are presented in
Table 1 and numbers of iterations needed for the a priori and a posteriori error estimate are shown in
Table 2 and
Table 3, respectively.
To get the data to fill the above tables and the tables in the forthcoming examples we use Maple 2016 software.
Let us consider a classic example, where the price function is linear and so are the cost functions of both players. Assuming the feasible market price is defined by
, it is expected that additional output
x from the first company as well as extra production
y of the second one will cause a decrease in prices. Therefore under equilibrium conditions
will be the total production of the two firms and it will also be reflected in prices. Let the two firms have cost functions equal to
and
, respectively. The profit of the first one is
and the profit of the second one is
Following the Cournot model after solving (
1) we get the response functions
and
of the two firms
and
, where
,
and
. Consequently it is a special case of the general example with
,
,
,
,
,
,
.
It is possible to find the constants in this case with the help of some Computer Algebra System (CAS), such as Maple, MathLab, MathCad or Mathematica. We will illustrate it by using Maple 2016. Writing the command
the software returns that
. The same result can be obtained and for the inequality
. Unfortunately when trying to solve the forthcoming more complicated examples Maple was not of good use, therefore we have preferred to use some of the classical inequalities and to make the calculations by hand.
Thus there exists an equilibrium pair and for any initial start in the economy where iterated sequences converge to the market equilibrium . We estimate in this case that the equilibrium pair of the production is and the total output will be .
Let us assume that the two firms have started with output
and
. In the following table (see
Table 4) we present how, depending on the response functions
F and
f the output of each company will change.
Let us assume that the two firms have started from productions
and
. In the next table (see
Table 5) we present how using the response functions
F and
f the productions of the two firms will change.
Numbers of iterations needed for the a priori and a posteriori error estimate are shown in
Table 6 and
Table 7 are presented in the case
, respectively.
4.2.2. A Nonlinear Case, When Each Player Is Producing a Single Product, While Goods Sold Are Perfect Substitutes
Let us consider a market with two competing firms, producing perfect substitute products with quantities and , respectively, where and is the complete metric space . Let us assume that each firm produces at least one item, i.e., . Let us consider the response functions of player one and player two , where
and
D can be defined as
It is easy to check that , and .
Indeed, we get
and
and therefore
,
and
.
There exists
between the points
y and
v so that there holds
. From the assumption that
we get that
. Using this last inequality we obtain
and
Therefore
and thus the ordered pair
satisfies Assumption 1 with constants
,
,
and
,
. Consequently there exists an equilibrium pair
and for any initial start in the economy the iterated sequences
converge to the market equilibrium
. We get in this case that the equilibrium pair of the production of the two firms is
(see
Table 8) and the total production will be
. Number of the needed iterations is presented in
Table 9 and
Table 10.
If we try to solve the system of equations
and
from the previous section, where for example
and
, with the help of Maple then we will get the exact result. Unfortunately when the response functions are not linear the software can give us just some approximation. No information is available about the uniqueness and the stability of the solution. The same observations have been made in
Zlatanov (
2021), the exact solution is possible to find with the help of the theory of coupled best proximity points, but the approximation solution, regardless of the precision, is never the exact one.
Let us consider again a case with two players, producing two products, but let them know the market demand function and behave rational, i.e., they are trying to maximize their profits, assuming that the rival player will do the same.
Let there be no limit on the market, but let us assume that the total consumption is
. That is, the market will consume a constant 1, which is
, and the production of both firms will be a percentage of the consumption
x and
y, respectively, i.e.,
. Let the market price be defined by
, where
x is the production of one of the firms,
y is the production of the other one, assuming that number 1 presents
. Let the two firms have cost functions equal to
and
, respectively. The profit of the first firm is
and the profit of the second firm is
Following Cournot model after solving (
1) we get the response functions
F and
f of the two players
which satisfy
and
, i.e.,
. Using the inequality
, for any
and some
between
x and
y we obtain
and
Therefore
and thus the ordered pair
satisfies Assumption 1 with constants
,
,
and
. There holds
. Thus there exists an equilibrium pair
and for any initial start in the economy the iterated sequences
converge to the market equilibrium
. We get in this case that the equilibrium pair of the production of the two firms is
, i.e., the first firm will have a share of
and the second one a share of
of the sold goods (see
Table 11 if the starting point is
,
Table 12 if the starting point is
and
Table 13 if the starting point is
). The total production will be
, i.e.,
of the total demand of the market.
4.2.3. Each Player Is Producing Two Product Types, Goods from Each Type Being Perfect Substitutes
Let us consider a market with two competing firms, and each firm is producing two product types. For simplicity we assume that goods from each type produced by major players are perfect substitutes. While it is possible that two types have nothing it common, it still means that within each type customers can freely replace a product from the first company with one manufactured by the second one. Let us assume that each firm produces at least one item from each product, i.e., . Let us denote the production of the two players by and , respectively.
Let the market of the two goods be endowed with the
p norm,
, i.e.,
Let us consider the response functions
and
defined by
where
and
It is easy to see that , whenever .
Using the inequality
, which holds for any
we get the chain of inequalities
and
Therefore
From the inequalities
and
it follows that the ordered pair
satisfies Assumption 1 with constants
,
,
and
. Thus there exists an equilibrium pair
and for any initial start in the economy the iterated sequences
converge to the market equilibrium
. We get in this case that the equilibrium pair of the production of the two firms is
,
(see
Table 14 and
Table 15) and the total production will be
. Numbers of iterations, that a needed to ensure the a priori (see
Table 16) and the a posteriori (see
Table 17) are calculated.




{kind=link}