1. Introduction
Imagine that you are washing the dishes with your partner after hosting a party: one washes, the other rinses. A guest who observes you from afar exclaims, ‘Oops…careful,’ just as you are about to fail to grab one of the slippery dishes that your partner hands over. In this scenario, action prediction allows you and your partner to choose suitable complementary actions while washing the dishes together [
1,
2]. Previous literature suggests that besides supporting the execution of social interactions, prediction also facilitates their observation [
3,
4,
5,
6]. Hence, in the previous scenario, the guest’s perception of the interaction is likewise supported by predictive representations. Individuals observing interactions from a third-person perspective create expectations about what might happen next in the interaction even though they are not directly engaged. This study focuses on reassessing the contribution of predictive mechanisms to the perception of social interactions. We note that previous research on this topic has not fully disambiguated between
action prediction and
action integration. Following this observation, we designed the present study to experimentally isolate a priori expectations about action–reaction interactions (
action prediction) from the a posteriori integration of both partners’ actions (
action integration).
In the last two decades, several studies have concluded that, when processing social interactions, the human visual system relies on predictions about how one partner will react to the other [
4,
5,
6,
7,
8]. All of these past studies follow the same experimental strategy. Specifically, two interacting point-light-display actors are presented simultaneously (
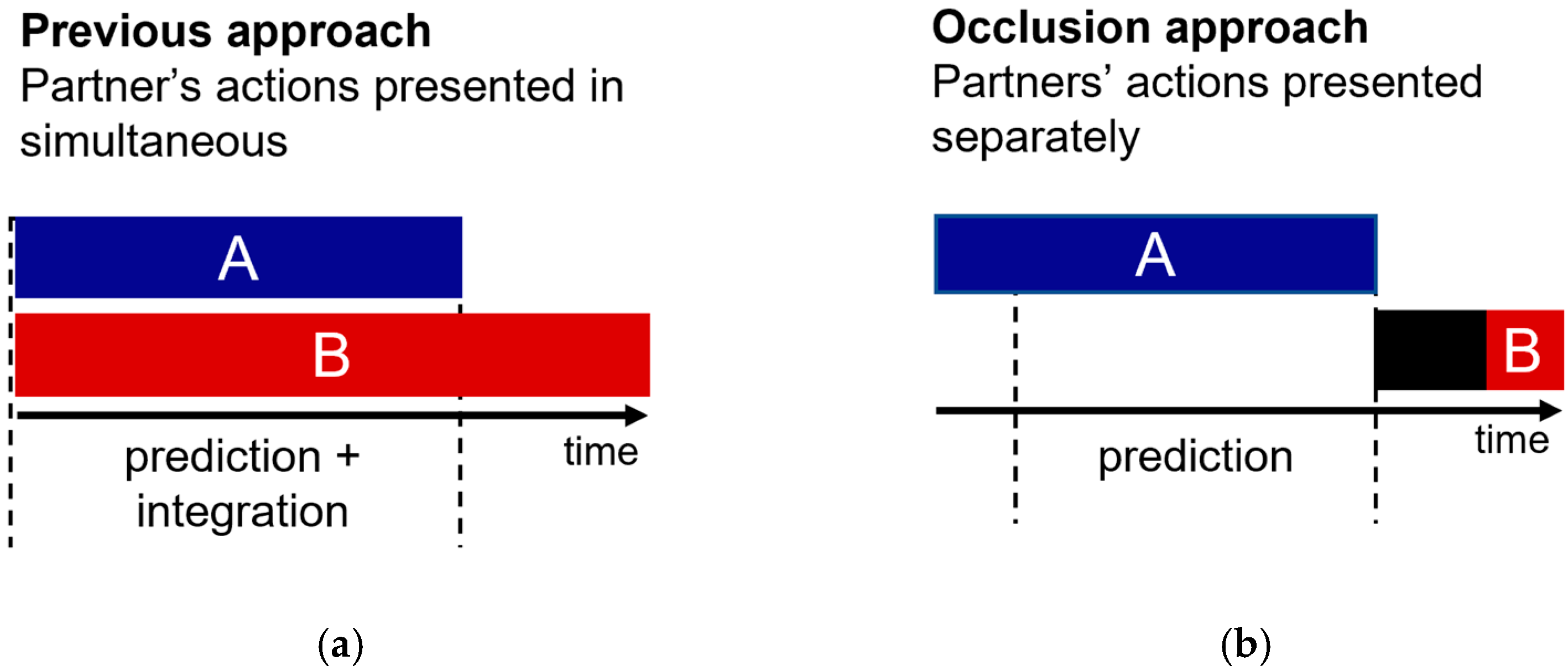
Figure 1a). Critically, one of the actors is easily visible (cue actor), and the other is masked by noise (target actor). Participants must detect the target actor as fast and accurately as possible. Prediction is quantified in the results by faster, or more accurate, visual detection of the target actor when embedded in a meaningful versus non-meaningful interaction (e.g., both actors react to one another versus actors act independently of one another).
A seminal study by Neri and colleagues [
6] indicated that participants had less difficulty detecting the target when two actors moved synchronously rather than asynchronously to one another while dancing or fighting. Later, Manera and colleagues [
5] extended these observations to the domain of communicative interactions. They found enhanced visual detection of the target actor when both actors behaved congruently (e.g., A asks B to sit down; B sits down) compared to when their actions were incongruent (e.g., A asks B to sit down; B picks something up) or unrelated (e.g., A drinks; B sits down). In addition, visual detection was hindered when the actors’ actions did not match in time [
3]. The proposed interpretation for this corpus of evidence is that observing the cue actor triggers predictions about how the target actor will react. In meaningful interactions, these predictions match the actions embedded in the noise and thus facilitate the perception of the target actor. However, the studies above have an interpretation problem: predictions about the target actor occur during and not before the presentation of the target actor. Therefore, it is possible that these studies measured (at least to some extent) the ease of
integration between the visible actor and the masked actor, rather than measuring the
prediction of the masked actor based on the actions of its visible partner.
The importance of considering the role of perceptual integration in social interaction perception is brought to focus by new observations showing that the visual system prioritizes the processing of social interactions as a whole, over the processing of individual actions [
9,
10,
11,
12,
13,
14]. It is widely accepted that the detection of stimuli encompassing multiple parts is facilitated by representing the parts as a whole [
15,
16]. Therefore, if our visual system processes social configurations as a whole, then the visual detection of interacting partners might be facilitated through perceptual integration. Recent evidence suggests that the visual system treats social scenes in a configurational manner, prioritizing the dyad’s processing over the processing of separate individuals [
9,
10,
11,
12,
13,
14]. Moreover, the observation that Gestalt phenomena are robust to visibility manipulations [
17] further supports the idea that perceptual grouping may occur even when part of the stimuli is masked by noise. Hence, an alternative interpretation for previous social prediction findings [
4,
5,
6,
7,
8] could be delineated as follows: When the point-light displays were spatiotemporally aligned in a meaningful way, their configural patterns tapped into the visual system bias to efficiently bind social information leading to visual detection enhancement. Given this competing account, research directed at understanding the role of prediction in social interaction perception must carefully consider—and control for—a posteriori data integration processes.
The present study investigates the role of prediction in social interaction perception while avoiding the action integration confound identified above. Our hypothesis is in line with past research on this topic: If prediction drives the perception of social interactions, then spatiotemporal simulations of the interaction must be generated in real-time to be compared with the upcoming sensory input. However, in our new test of this old hypothesis, we controlled for action integration confounds by separating the presentation of action and reaction (
Figure 1b).
We adapted an occlusion task previously used to study individual action prediction [
18]. Participants watched an animated sequence featuring two 3D characters, one red and one blue. Critically, half of the action–reaction sequences were semantically congruent, and the remaining were incongruent. For example,
blue approaches to shake
red’s hand, and
red shake their hand (congruent action–reaction) versus
blue approaches to shake
red’s hand, and
red leans down (incongruent action–reaction). Each sequence starts with an animation of a blue character executing a social action, while a red character is neutral and static. For example,
blue approaches to shake
red’s hand, and
red stands still. Immediately after, instead of presenting the red actor’s reaction (e.g.,
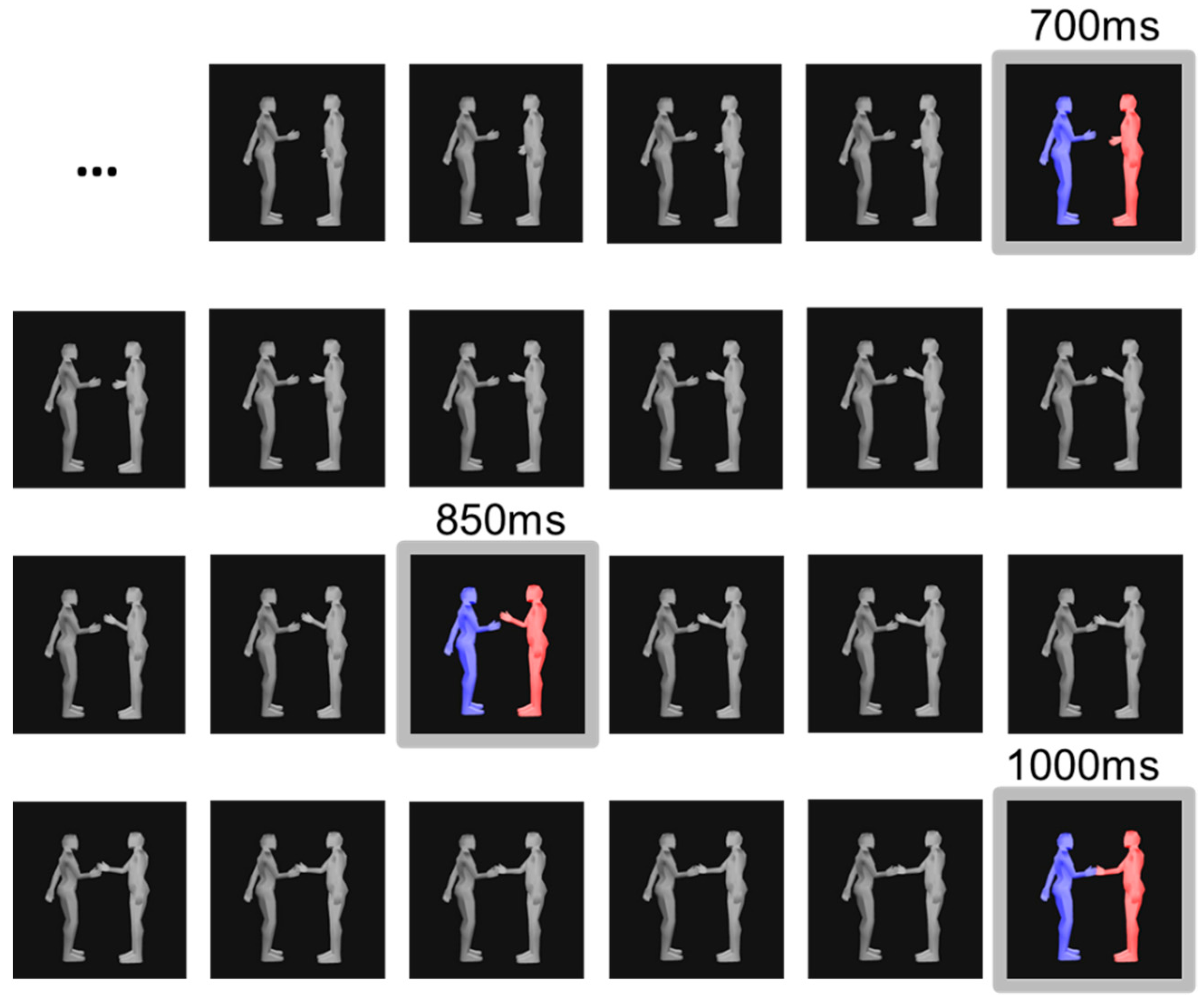
red reciprocally shaking blue’s hand), a black screen covers the animation for a short time (occlusion duration of 700 ms, 850 ms or 1000 ms) until a still frame depicting red’s reaction is shown (reaction frame). The still frame shows
red at a specific instant of its reaction (
Figure 2). In the example of shaking hands, the reaction frame is a still image of
red at a particular stage of extending its hand, either starting to lift the hand (at 700 ms), mid-way through extending the arm forward (at 850 ms) or grabbing blue’s hand (at 1000 ms). After this, participants judged the congruency of the action–reaction sequences.
Occlusion duration (700 ms, 850 ms, 1000 ms) and reaction frame (at 700 ms, at 850 ms, at 1000 ms) were independently varied to create three temporal alignment conditions: Δ0—the moment depicted in the reaction frame was temporally aligned with the time passed since the start of the occlusion (e.g., 1000 ms were occluded, and the frame showed the reaction after 1000 ms had passed); Δ150—the moment showed in the reaction frame occurred 150 ms before or after the occlusion duration (e.g., 1000 ms were occluded, but the frame depicted the reaction at 850 ms) and Δ300—the moment showed in the reaction frame occurred 300 ms before or after the occlusion duration (e.g., 1000 ms were occluded, but the frame depicted the reaction at 700 ms).
We predicted that if participants internally simulate the temporal unfolding of the interaction, their congruency judgments will be faster and more accurate when the reaction frame presented after the occlusion corresponds to the time passed since the start of the occlusion. This reasoning is based on the hypothesis that observers internally simulate time-locked expectations of the reactions. Hence, once a frame of the reaction is shown, participants can quickly compare it to their internal representations and determine if it is a congruent or incongruent reaction. Following this reasoning, we expected that performance would deteriorate with increasing distance between the occlusion duration and the moment depicted in the reaction frame (i.e., responses in the Δ0 condition would be faster and more accurate than responses in the Δ150 condition, which would, in turn, be quicker and more accurate than responses in the Δ300 condition).
Importantly, unlike previous studies, we separated the presentation of the predictive action from the predicted reaction. Our primary goal was to examine action prediction in isolation from action integration. In addition, this study will explore the relationship between individuals’ autistic traits and their sensitivity to temporal deviations in social interactions. A previous study using the simultaneous presentation of two actors in interaction showed that high-functioning-autism (HFA) participants did not automatically use the visible actor’s action to predict the masked partner [
4]. Thus, the authors suggest that individuals with HFA show a lower tendency to rely on predictive mechanisms when observing social interactions. However, the experimental approach used in this previous study does not disambiguate between action prediction and action integration. Therefore, it could be that individuals with HFA differently integrate the information from individual actors in a simultaneous interaction. In support of this alternative interpretation, a recent study shows that individuals with higher autistic traits show a lower tendency to process images of two bodies in a social configuration as unitary percept [
19]. These observations further motivate using an experimental approach that can disambiguate between predictive and integrative mechanisms.
4. Results
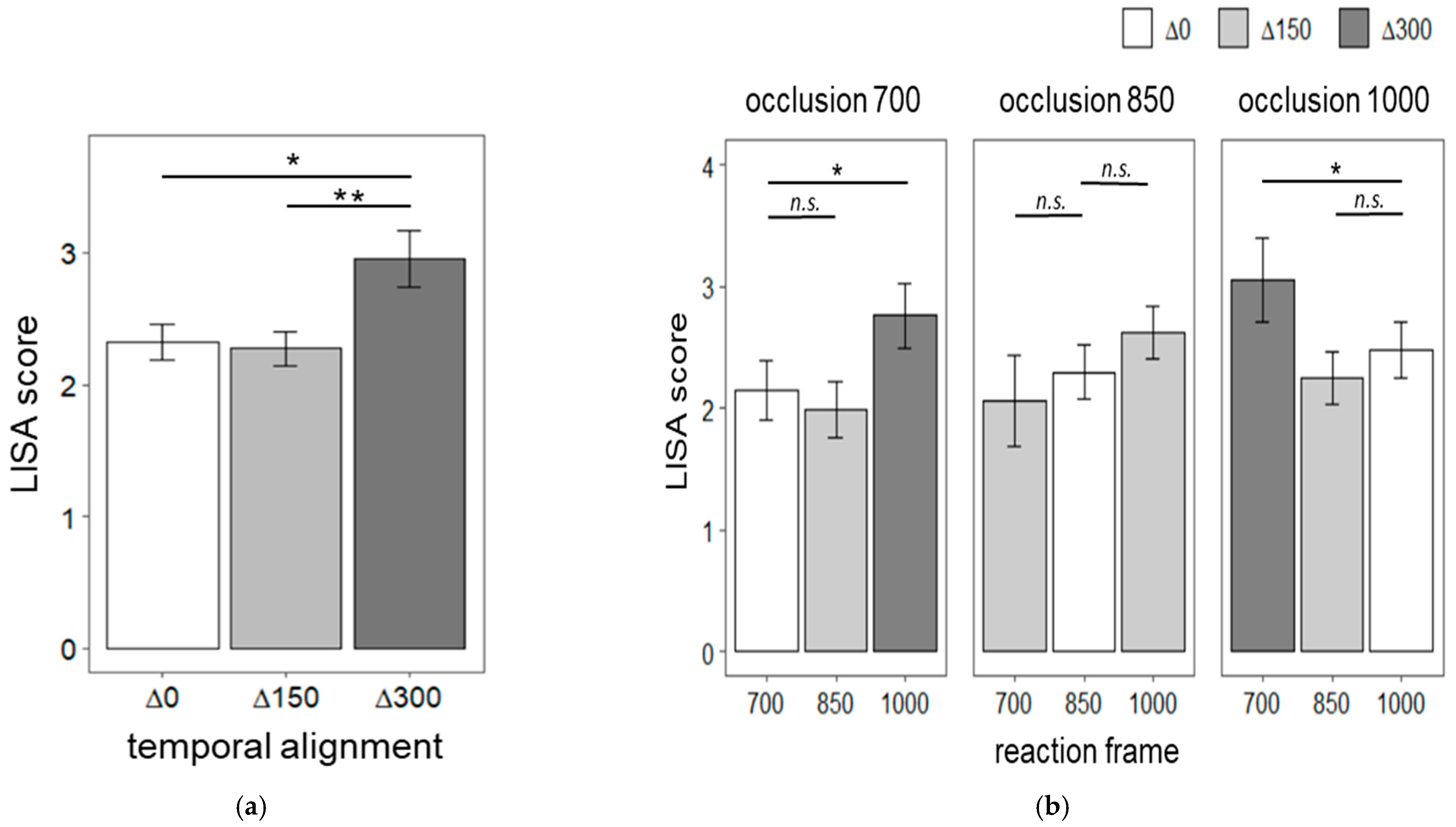
Figure 4a shows the linear speed-accuracy scores (LISAS) for Δ0, Δ150 and Δ300 temporal alignment conditions. A repeated-measures ANOVA indicated that the distance between occlusion duration and reaction frame timing interferes with speed-accuracy scores, F (2,38) = 11.01,
p < 0.0001, η
2 = 0.09. Post-hoc pairwise t-tests with Bonferroni correction showed that both Δ0 (mean = 2.33, SD = 0.84) and Δ150 (mean =2.27, SD = 0.82) had lower speed-accuracy scores than Δ300 (mean = 2.95, SD = 1.27),
t (19) = −3.73,
p < 0.01, 95% CI [1.93 2.72] and
t (19) = −3.34,
p < 0.05, 95% CI [1.89, 2.66], respectively. Δ0 and Δ150 did not significantly differ. Next, we tested if speed-accuracy scores within each occlusion duration level (
Figure 4b). Specifically, we independently tested for each occlusion level if the LISAS in the Δ0 temporal alignment condition (i.e., oclusion700-frame700, oclusion850-frame850 and oclusin1000-frame1000) were lower than the LISAS corresponding to temporal deviations. For example, for the occlusion duration of 700 ms, LISAS for oclusion700-frame700 trials were lower than oclusion700-frame850 and oclusion700-frame1000 LISAS. Planned contrasts revealed that LISAS for 700 ms occlusion followed by a reaction frame at 700 ms were lower than when a reaction frame at 1000 ms followed the same occlusion duration,
t (19) = 2.14,
p < 0.05. Additionally, LISAS for 1000 ms occlusion followed by a reaction frame at 1000 ms were lower than when a reaction frame at 700 ms followed the same occlusion duration,
t (19) = 2.13,
p < 0.05. The remaining comparisons were not significant.
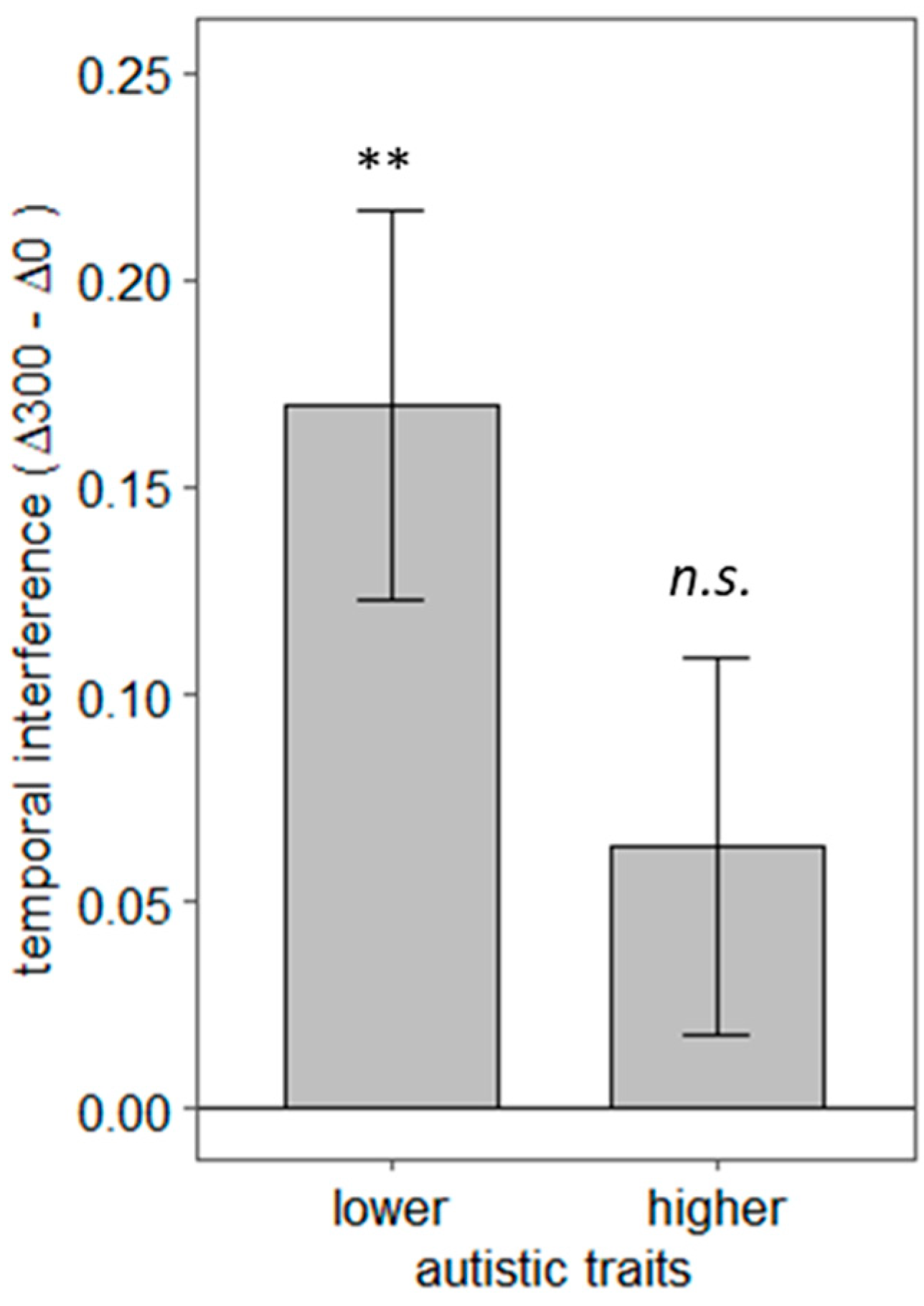
To explore the link between autistic traits and individual differences in social interaction prediction, we divided our participant sample into two groups using a median split on the autistic quotient. The mean AQ score was 18.55 (SD =7.7). A median split meant that 8 participants scoring between 11 and 16 were considered in the lower autistic traits group, and 12 participants scoring between 17 and 44 were assigned to the higher autistic traits group. A temporal interference score was computed for each participant by calculating the difference between LISAS at Δ300 and LISAS at Δ0. This score allowed us to index participants’ sensitivity to the temporal alignment of the action–reaction sequences. If the difference between LISAS at Δ300 and Δ0 is statistically greater than zero, we can conclude that temporal deviations hindered participants’ congruency judgments.
Figure 5 shows the mean interference scores for lower and higher autistic traits groups. Bonferroni corrected one-tailed t-tests revealed that the lower autistic trait group was affected by the temporal deviation of 300 ms,
t (7) = 3.62,
p < 0.01, 95% CI [−∞, 2.66],
d = 1.28.
In contrast, the higher autistic trait group was not,
t (11) = 1.40,
p = 0.10,
d = 0.40. A Welch two-sample t-test showed that lower and higher autistic groups did not differ significantly in temporal interference,
t (16.82) = 1.63,
p = 0.12,
d = 0.73. To further explore the link between autistic traits and social interaction prediction, we performed a Pearson correlation test between participants AQ scores and their temporal interference index. This test showed a non-significant trend toward a positive link between temporal interference and AQ scores,
r (18) = −0.30,
p = 0.19. Post-hoc power analyses were conducted. Using eight participants (lower autistic group), the one-sample t-test would be sensitive to an effect size of
d = 0.5 with 37% power. Using 12 participants (higher autistic group), the power of this test is 36%. The Welch two-sample t-test comparing both autistic trait groups would be sensitive to an effect size of
d = 0.5 with only 17% power using the sample sizes in our study. Using 20 participants, a Pearson correlation test would be sensitive to an r value of 0.3 with only 25% power. These post-hoc power analyses show that our study does not have enough power to reliably capture the relationship between participants’ autistic traits and their sensitivity to temporal deviations.
5. Discussion
The current study isolated
action prediction—a priori representations of an upcoming reaction to an observed action—from
action integration—a posteriori processing of simultaneous actions between interacting partners. Our main finding is that judging the congruency of an observed action–reaction sequence was facilitated when the observed reaction was temporally aligned with expectations about its unfolding, compared to when it deviated by 300 ms. Because performance in judging the congruence of the action–reaction sequences depended on temporal alignment, we can conclude that the findings reflect the effects of time-based action predictions rather than a posteriori action integration. Our study thus provides additional evidence supporting the notion that human perceptual systems generate time-locked action predictions about observed social interactions [
1,
2].
Interestingly, while deviations of 300 ms affected most observers’ ability to judge the social interactions, deviations of 150 ms did not show any interference. This observation suggests that temporal resolution in predictive representations is above 150 ms. From a computational point of view, reducing the level of detail of internal representations is a viable strategy to optimize predictive mechanisms. As a result, predictive systems may become more robust to external uncertainty by relaxing their sensitivity to deviations between sensory input and internal predictive representations. However, this strategy comes at the cost of information loss [
24]. We suggest that, in our study, the trade-off point between robust and precise temporal predictions was somewhere between 150 ms and 300 ms. In future research, a parametric manipulation of the temporal deviations in the experimental task can probe this resolution.
Whereas the results from the present study show the involvement of time-based predictive processes in the perception of social interactions, it is essential to acknowledge that it is not possible to conclude if this link is specific to social interactions. Real-time predictions are known to be engaged in the perception of individuals in isolation [
18] and extend to non-biological motion [
25]. Moreover, it is essential to recognize that the present study cannot offer insight into whether action–reaction predictions are purely perceptual or engage the motor system. In contrast to the motor theories that dominated social cognition in the early 2000s [
26], recent neuroscientific evidence supports a purely perceptual account of social interaction perception. Specifically, several recent studies independently reported that the superior temporal sulcus (STS) is selectively involved in the perception of social interactions [
27,
28,
29]. The STS is a visual area known for its engagement in the visual processing of biological motion. However, long-onset latencies in STS cells have been reported, and these could, in theory, allow for the integration of top-down input from pre-motor areas [
30]. Future research is needed to probe if the STS works in tandem with pre-motor areas to formulate time-based interaction predictions.
Furthermore, the current study offers preliminary insights on the link between social predictions and autistic traits. Specifically, we observed that participants with higher autistic traits (i.e., non-clinical propensity to empathize less strongly with others and engage in systemized thinking) are insensitive to temporal deviations of 300 ms when judging the coherence of social interactions. This preliminary observation aligns well with the notion that Autism Spectrum Disorder (ASD) is rooted in disordered predictive mechanisms [
31]. According to this proposition, a decreased ability to recognize predictive links between environmental events may explain the diverse behavioural traits in ASD. We caution against any conclusive interpretations of these findings due to lack of power in our study. Nonetheless, our observations may motivate and inform the design of future studies that are directly aimed at capturing individual differences in social interaction perception. Based on the observed effect sizes in our data, we suggest that future studies should include at least 59 participants in each of the lower and higher autistic traits groups to achieve a power of 85%. The AQ score threshold for the inclusion of participants in lower and higher autistic trait groups should be defined a priori.
The contribution of the present study to our current understanding of social interaction perception is two-fold. First, the study offers new behavioural evidence supporting that prediction underlies social interaction perception. In addition, the study puts forward a new methodological approach to avoid action integration confounds when measuring social interaction prediction. The observation of prediction independently of simultaneous action integration does not preclude the notion that the priors in the predictive process —i.e., the long-term semantic knowledge about social interactions—are encoded in an integrative fashion [
10,
32,
33]. Integrative priors offer a reasonable explanation to the observed facilitation in detecting a congruent partner when observing social interactions [
4,
5,
6,
7,
8]. In line with this reasoning, our study advances an experimental approach to isolate the contribution of integrative priors (a priori expectations about social interactions) from the contribution of online action integration processing to the perception of social interactions. We hope that the current research will stimulate further experimental developments to disentangle the interdependencies between action prediction and action integration mechanisms and, in this way, advance the understanding of how humans perceive dynamic social interactions.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




