
Comparing the Effects of Exoskeletal-Type Robot-Assisted Gait Training on Patients with Ataxic or Hemiplegic Stroke


Abstract
:1. Introduction
2. Methods
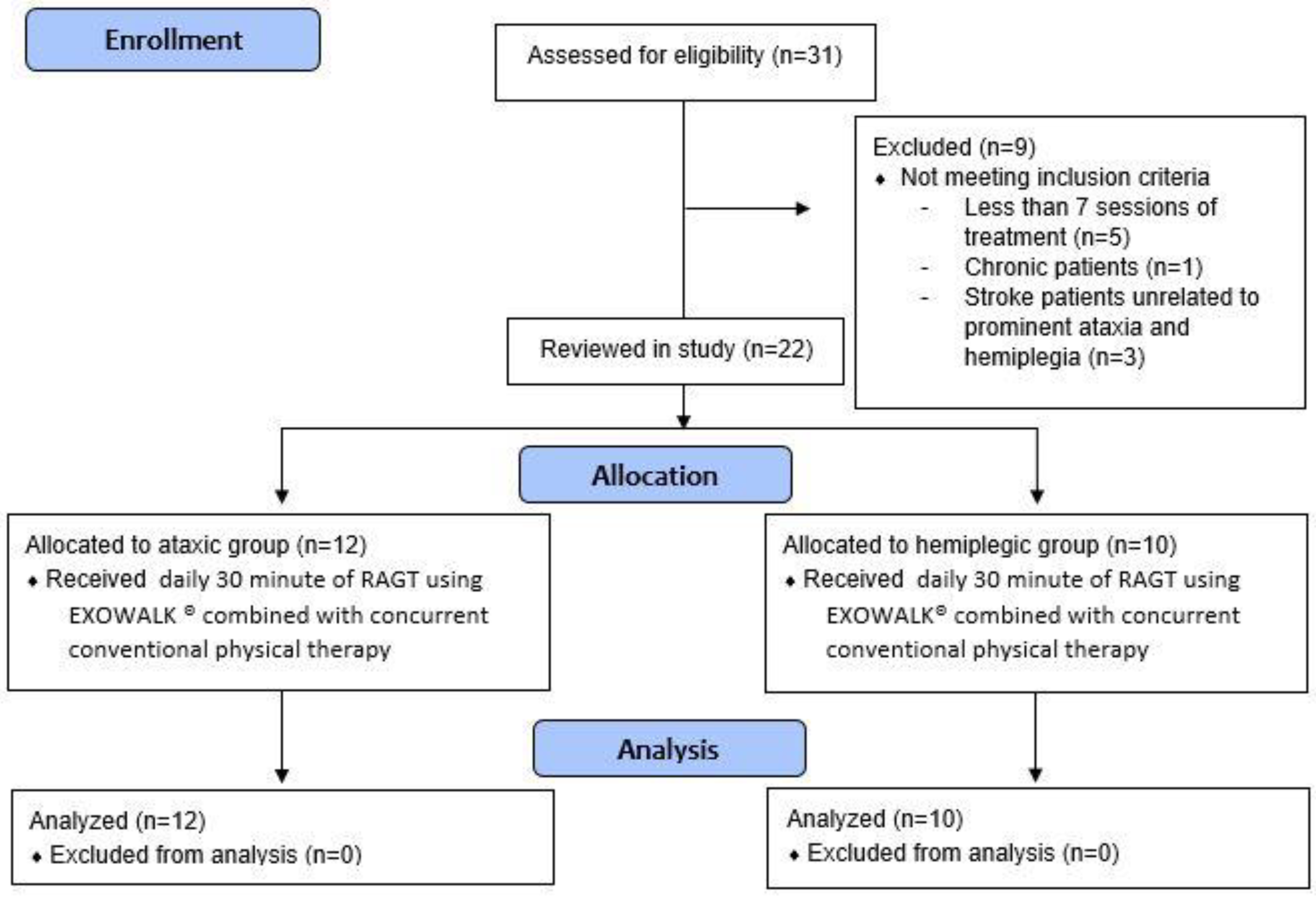
2.1. Patients
2.2. RAGT with EXOWALK®
2.3. Outcome Measures
2.4. Statistical Analysis
3. Results
3.1. Patients’ Characteristics
3.2. Outcome Measures
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| RAGT | Robot-assisted gait training |
| BBS | Berg balance scale |
| FAC | Functional ambulation category |
| MBI-m | Mobility subcategories of the modified Barthel Index |
| ICARS | International cooperative ataxia rating scale. |
References
- Kim, D.Y.; Kim, Y.H.; Lee, J.M.; Chang, W.H.; Kim, M.W.; Pyun, S.B.; Yoo, W.K.; Ohn, S.H.; Park, K.D.; Oh, B.M.; et al. Clinical practice guideline for stroke rehabilitation in Korea 2016. Brain Neurorehabilit. 2017, 14, e11. [Google Scholar] [CrossRef]
- Ebersbach, G.; Sojer, M.; Valldeoriola, F.; Wissel, J.; Müller, J.; Tolosa, E.; Poewe, W. Comparative analysis of gait in Parkinson’s disease, cerebellar ataxia and subcortical arteriosclerotic encephalopathy. Brain 1999, 122, 1349–1355. [Google Scholar] [CrossRef] [PubMed]
- Schöls, L.; Klockgether, T. Ataxia. In Neuropsychiatric Symptoms of Movement Disorders; Reichmann, H., Ed.; Springer: New York, NY, USA, 2015; pp. 277–292. [Google Scholar]
- Bonnì, S.; Ponzo, V.; Caltagirone, C.; Koch, G. Cerebellar theta burst stimulation in stroke patients with ataxia. Funct. Neurol. 2014, 29, 41–45. [Google Scholar] [CrossRef] [PubMed]
- Ng, Z.X.; Yang, W.R.; Seet, E.; Koh, K.M.; Teo, K.J.; Low, S.W.; Chou, N.; Yeo, T.T.; Venketasubramanian, N. Cerebellar strokes: A clinical outcome review of 79 cases. Singapore Med. J. 2015, 56, 145–149. [Google Scholar] [CrossRef] [PubMed]
- Bogousslavsky, J.; Van Melle, G.; Regli, F. The Lausanne Stroke Registry: Analysis of 1000 consecutive patients with first stroke. Stroke 1988, 19, 1083–1092. [Google Scholar] [CrossRef]
- Morton, S.M.; Bastian, A.J. Relative contributions of balance and voluntary leg-coordination deficits to cerebellar gait ataxia. J. Neurophysiol. 2003, 89, 1844–1856. [Google Scholar] [CrossRef]
- Sawacha, Z.; Carraro, E.; Contessa, P.; Guiotto, A.; Masiero, S.; Cobelli, C. Relationship between clinical and instrumental balance assessments in chronic post-stroke hemiparesis subjects. J. Neuroeng. Rehabil. 2013, 10, 95. [Google Scholar] [CrossRef]
- Keller, J.L.; Bastian, A.J. A home balance exercise program improves walking in people with cerebellar ataxia. Neurorehabil. Neural Repair 2014, 28, 770–778. [Google Scholar] [CrossRef] [PubMed]
- Mehrholz, J.; Thomas, S.; Pohl, M.; Elsner, B. Electromechanical-assisted training for walking after stroke. Cochrane Database Syst. Rev. 2020, 10, CD006185. [Google Scholar] [CrossRef]
- Głowinski, S.; Ptak, M. A kinematic model of a humanoid lower limb exoskeleton with pneumatic actuators. Acta Bioeng. Biomech. 2022, 24, 2022. [Google Scholar] [CrossRef]
- Yun, N.; Joo, M.C.; Kim, S.C.; Kim, M.S. Robot-assisted gait training effectively improved lateropulsion in subacute stroke patients: A single-blinded randomized controlled trial. Eur. J. Phys. Rehabil. Med. 2018, 54, 827–836. [Google Scholar] [CrossRef] [PubMed]
- Moucheboeuf, G.; Griffier, R.; Gasq, D.; Glize, B.; Bouyer, L.; Dehail, P.; Cassoudesalle, H. Effects of robotic gait training after stroke: A meta-analysis. Ann. Phys. Rehabil. Med. 2020, 63, 518–534. [Google Scholar] [CrossRef] [PubMed]
- Nam, Y.G.; Lee, J.W.; Park, J.W.; Lee, H.J.; Nam, K.Y.; Park, J.H.; Yu, C.S.; Choi, M.R.; Kwon, B.S. Effects of electromechanical exoskeleton-assisted gait training on walking ability of stroke patients: A randomized controlled trial. Arch. Phys. Med. Rehabil. 2019, 100, 26–31. [Google Scholar] [CrossRef] [PubMed]
- dos Santos, M.B.; de Oliveira, C.B.; dos Santos, A.; Pires, C.G.; Dylewski, V.; Arida, R.M. A Comparative study of conventional physiotherapy versus robot-assisted gait training associated to physiotherapy in individuals with ataxia after stroke. Behav. Neurol 2018, 2018, 2892065. [Google Scholar] [CrossRef]
- Wang, L.; Zheng, Y.; Dang, Y.; Teng, M.; Zhang, X.; Cheng, Y.; Zhang, X.; Lu, X. Effects of robot-assisted training on balance function in patients with stroke: A systematic review and meta-analysis. J. Rehabil. Med. 2021, 53, jrm00174. [Google Scholar] [CrossRef] [PubMed]
- Gandolfi, M.; Geroin, C.; Picelli, A.; Munari, D.; Waldner, A.; Tamburin, S.; Marchioretto, F.; Smania, N. Robot-assisted vs. sensory integration training in treating gait and balance dysfunctions in patients with multiple sclerosis: A randomized controlled trial. Front. Hum. Neurosci. 2014, 8, 318. [Google Scholar] [CrossRef] [PubMed]
- Blum, L.; Korner-Bitensky, N. Usefulness of the Berg Balance Scale in stroke rehabilitation: A systematic review. Phys. Ther. 2008, 88, 559–566. [Google Scholar] [CrossRef] [PubMed]
- Mehrholz, J.; Wagner, K.; Rutte, K.; Meissner, D.; Pohl, M. Predictive validity and responsiveness of the functional ambulation category in hemiparetic patients after stroke. Arch. Phys. Med. Rehabil. 2007, 88, 1314–1319. [Google Scholar] [CrossRef] [PubMed]
- Wade, D.T.; Collin, C. The Barthel ADL Index: A standard measure of physical disability. Int. Disabil. Stud. 1988, 10, 64–67. [Google Scholar] [CrossRef]
- Januário, F.; Campos, I.; Amaral, C. Rehabilitation of postural stability in ataxic/hemiplegic patients after stroke. Disabil. Rehabil. 2010, 32, 1775–1779. [Google Scholar] [CrossRef]
- Bultmann, U.; Pierscianek, D.; Gizewski, E.R.; Schoch, B.; Fritsche, N.; Timmann, D.; Maschke, M.; Frings, M. Functional recovery and rehabilitation of postural impairment and gait ataxia in patients with acute cerebellar stroke. Gait Posture 2014, 39, 563–569. [Google Scholar] [CrossRef] [PubMed]
- de Haart, M.; Geurts, A.C.; Huidekoper, S.C.; Fasotti, L.; van Limbeek, J. Recovery of standing balance in postacute stroke patients: A rehabilitation cohort study. Arch. Phys. Med. Rehabil. 2004, 85, 886–895. [Google Scholar] [CrossRef] [PubMed]
- Mayr, A.; Kofler, M.; Quirbach, E.; Matzak, H.; Fröhlich, K.; Saltuari, L. Prospective, blinded, randomized crossover study of gait rehabilitation in stroke patients using the Lokomat gait orthosis. Neurorehabil. Neural Repair 2007, 21, 307–314. [Google Scholar] [CrossRef] [PubMed]
- Jung, C.; Kim, D.Y.; Kwon, S.; Chun, M.H.; Kim, J.; Kim, S.H. Morning Walk®-assisted gait training improves walking ability and balance in patients with ataxia: A randomized controlled trial. Brain Neurorehabil. 2020, 13, e23. [Google Scholar] [CrossRef]
- Hesse, S.; Konrad, M.; Uhlenbrock, D. Treadmill walking with partial body weight support versus floor walking in hemiparetic subjects. Arch. Phys. Med. Rehabil. 1999, 80, 421–427. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Total (n = 22) | Ataxic Group (n = 12) | Hemiplegic Group (n = 10) | p-Value | |
|---|---|---|---|---|
| Age (years) | 65.5 (62.0–74.8) | 63.5 (61.0–73.0) | 69.0 (64.3–74.8) | 0.346 |
| Time from onset (days) | 21.0 (15.5–53.3) | 24.5 (17.0–39.5) | 16.0 (12.3–63.8) | 0.628 |
| Sex | ||||
| Male | 16 | 8 | 8 | |
| Female | 6 | 4 | 2 | 0.646 |
| Etiology | ||||
| Ischemic | 19 | 10 | 9 | 1.000 |
| Hemorrhagic | 3 | 2 | 1 | |
| RAGT treatment times | 9.5(8.0–11.0) | 8.5(8.0–11.0) | 10.0(7.5–11.8) | 0.539 |
| Total (n = 22) | Ataxic Group (n = 12) | Hemiplegic Group (n = 10) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Before | After | p-Value | Before | After | p-Value | Before | After | p-Value | |
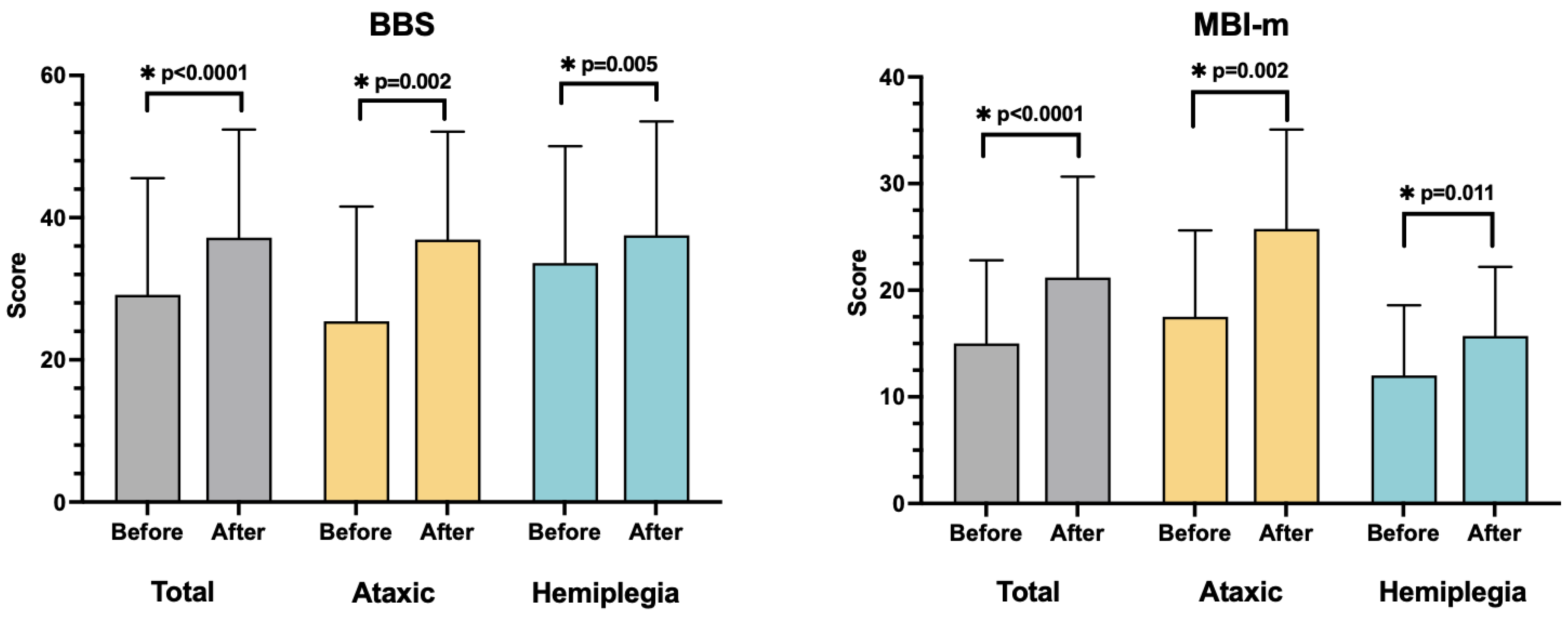
| BBS | 29.14 ± 16.43 | 37.18 ± 15.21 | <0.0001 * | 25.42 ± 16.15 | 36.92 ± 15.19 | 0.002 * | 33.60 ± 16.45 | 37.50 ± 16.04 | 0.005 * |
| MBI-m | 15.00 ± 7.81 | 21.18 ± 9.47 | <0.0001 * | 17.50 ± 8.12 | 25.80 ± 9.31 | 0.002 * | 12.00 ± 6.58 | 15.70 ± 6.48 | 0.011 * |
| Total (n = 22) | Ataxic Group (n = 12) | Hemiplegic Group (n = 10) | |||||
|---|---|---|---|---|---|---|---|
| n (%) | 95% CI | p-Value | n (%) | 95% CI | n (%) | 95% CI | |
| Subjects with FAC Improvement | 20 (90.9) | (70.8, 98.9) | 0.0001 # | 12 (100.0) | - | 8 (80.0) | (44.4, 97.5) |
| Pre/Post | 0 | 1 | 2 | 3 | 4 | Total | p-value |
| 0 | 1 | 2 | 4 | 0 | 0 | 7 | 0.0056 § |
| 1 | 0 | 1 | 2 | 2 | 2 | 7 | |
| 2 | 0 | 0 | 0 | 4 | 4 | 8 | |
| 3 | 0 | 0 | 0 | 0 | 0 | 0 | |
| Parameter | Estimate | SE | p-Value | ||
|---|---|---|---|---|---|
| BBS | Total | Intercept | −15.43 | 12.02 | 0.2464 |
| Count | 2.45 | 1.44 | 0.1393 | ||
| Ataxic vs. Hemiplegic | 9.44 | 2.87 | 0.0167 | ||
| Ataxic | Intercept | −14.00 | 34.65 | 0.7132 | |
| Count | 3.50 | 4.55 | 0.4977 | ||
| Hemiplegic | Intercept | −13.89 | 10.73 | 0.3249 | |
| Count | 2.26 | 1.29 | 0.2208 | ||
| MBI-m | Total | Intercept | 3.15 | 13.16 | 0.8188 |
| Count | 0.16 | 1.57 | 0.9206 | ||
| Ataxic vs. Hemiplegic | 6.01 | 3.15 | 0.1048 | ||
| Ataxic | Intercept | −20.00 | 37.22 | 0.6284 | |
| Count | 4.00 | 4.89 | 0.4731 | ||
| Hemiplegic | Intercept | 8.78 | 7.60 | 0.3676 | |
| Count | −0.52 | 0.91 | 0.6264 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Son, S.; Lim, K.-B.; Kim, J.; Lee, C.; Cho, S.I.; Yoo, J. Comparing the Effects of Exoskeletal-Type Robot-Assisted Gait Training on Patients with Ataxic or Hemiplegic Stroke. Brain Sci. 2022, 12, 1261. https://doi.org/10.3390/brainsci12091261
Son S, Lim K-B, Kim J, Lee C, Cho SI, Yoo J. Comparing the Effects of Exoskeletal-Type Robot-Assisted Gait Training on Patients with Ataxic or Hemiplegic Stroke. Brain Sciences. 2022; 12(9):1261. https://doi.org/10.3390/brainsci12091261
Chicago/Turabian StyleSon, Sungsik, Kil-Byung Lim, Jiyong Kim, Changhun Lee, Sung II Cho, and Jeehyun Yoo. 2022. "Comparing the Effects of Exoskeletal-Type Robot-Assisted Gait Training on Patients with Ataxic or Hemiplegic Stroke" Brain Sciences 12, no. 9: 1261. https://doi.org/10.3390/brainsci12091261
APA StyleSon, S., Lim, K.-B., Kim, J., Lee, C., Cho, S. I., & Yoo, J. (2022). Comparing the Effects of Exoskeletal-Type Robot-Assisted Gait Training on Patients with Ataxic or Hemiplegic Stroke. Brain Sciences, 12(9), 1261. https://doi.org/10.3390/brainsci12091261