
Review on Multitemporal Classification Methods of Satellite Images for Crop and Arable Land Recognition


Abstract
:1. Introduction
2. Methods
3. Results
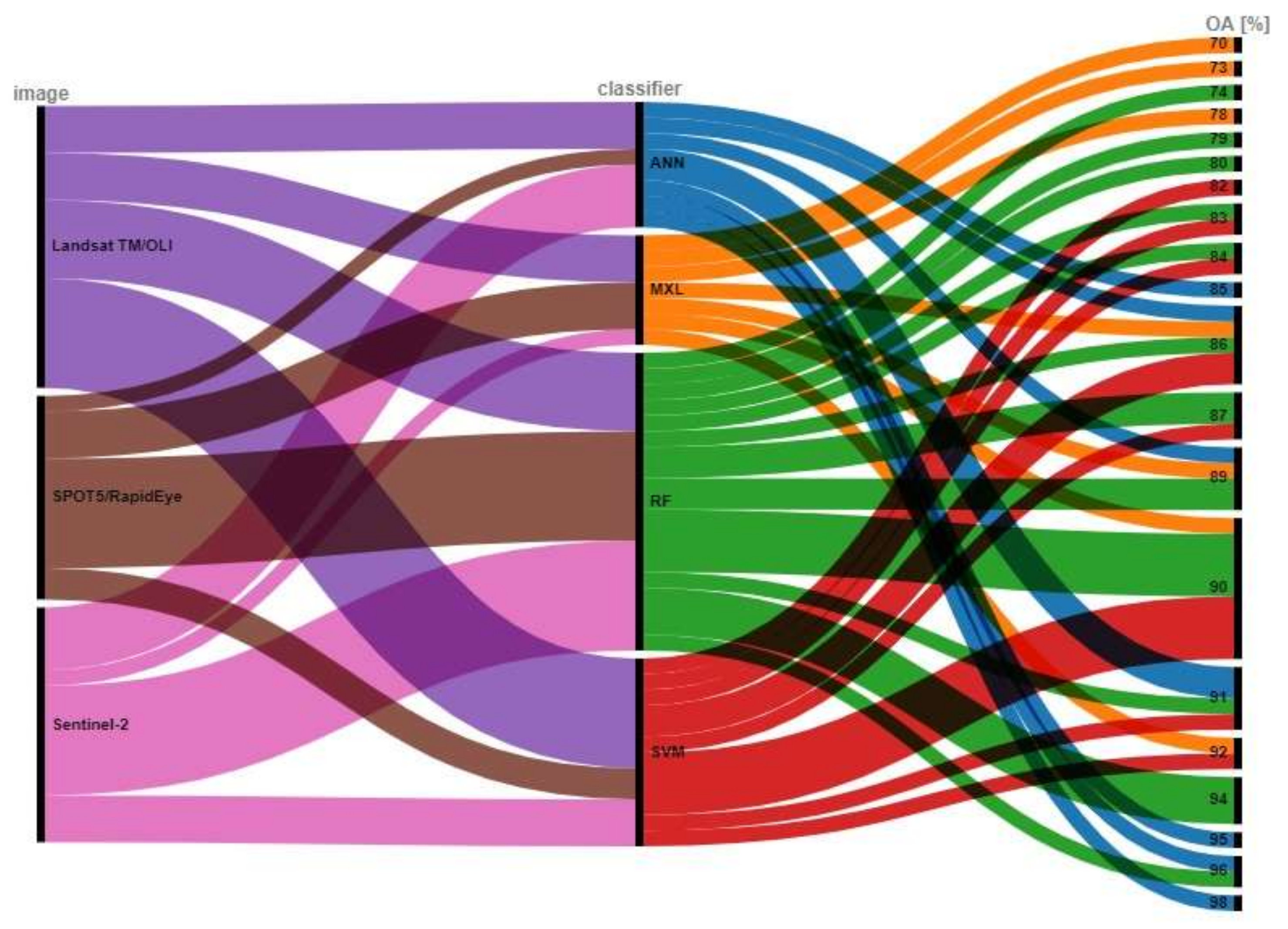
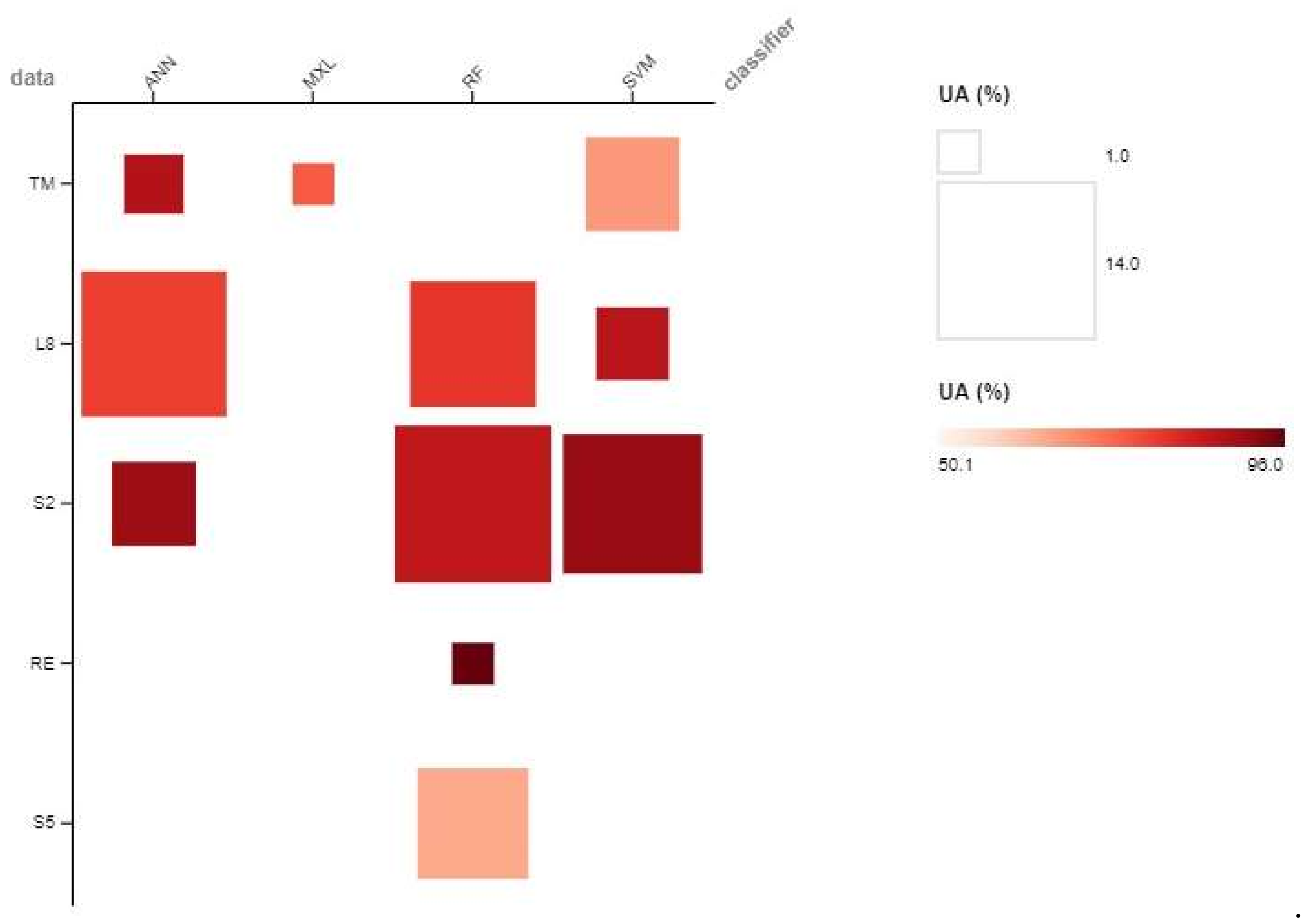
3.1. Approach to Classification
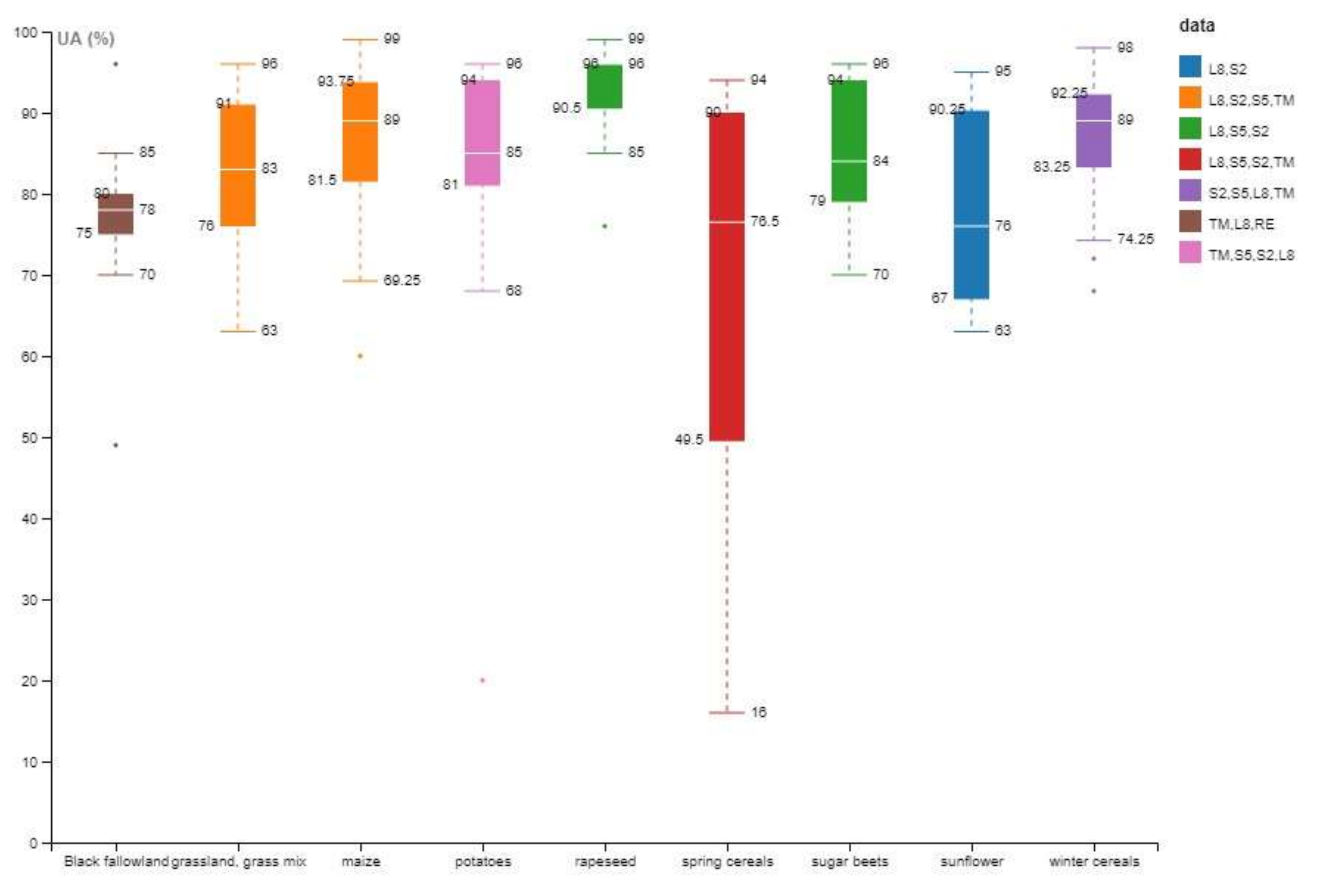
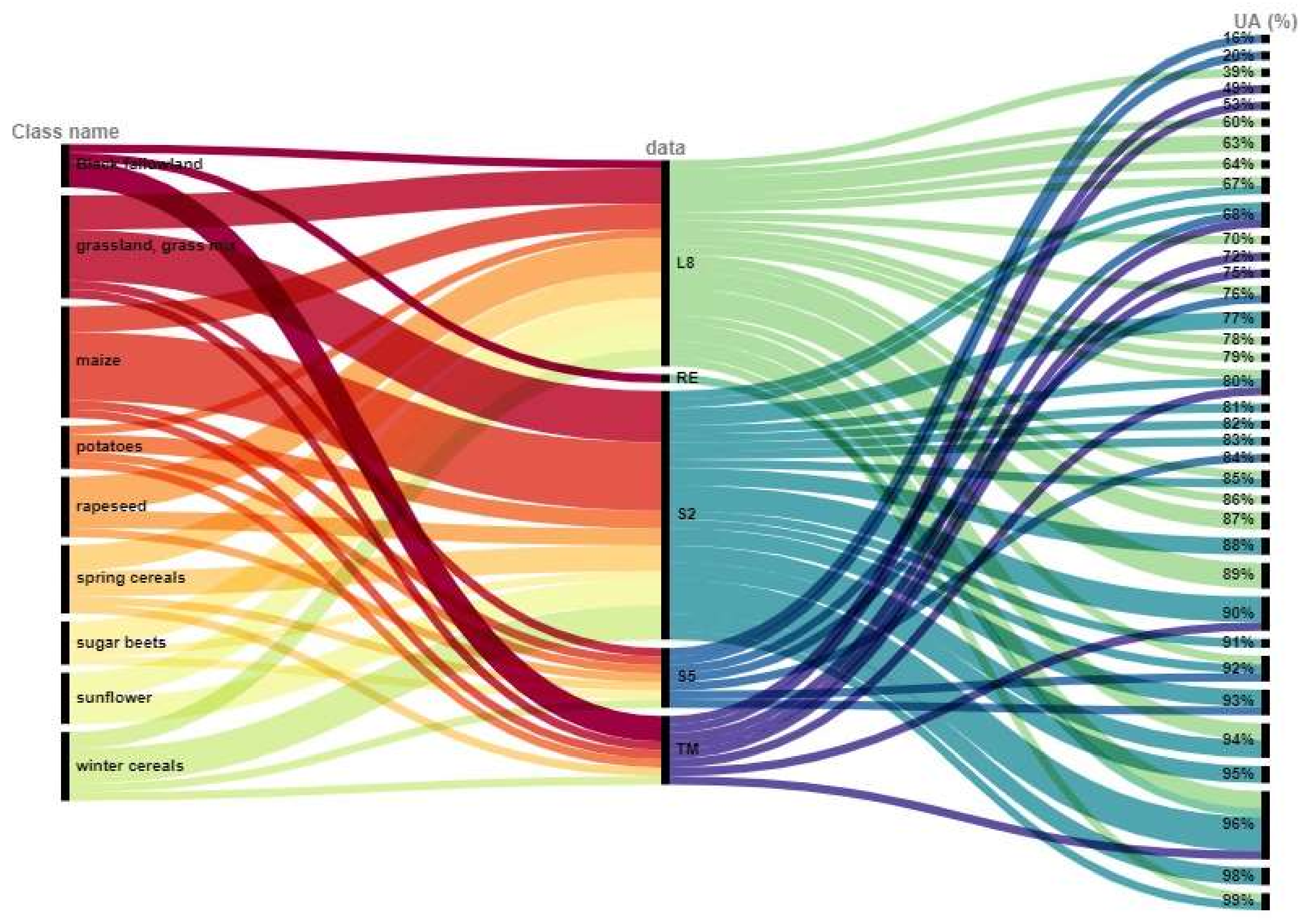
3.2. Dominant Species
3.3. Structure and Size of Agricultural Plots
4. Discussion
5. Conclusions
- There is no significant difference between the accuracy achieved from different ML algorithms, yet on average the ANN classifier is better than the others by a few percentage points.
- For complex, fragmented regions, better results were achieved using Sentinel-2 or SPOT-5 rather than Landsat images, but the level of accuracy can still be improved.
- For areas with large plots there is no difference in the level of accuracy achieved from any HR images.
- A multi-seasons approach dealing with an increasing number of images captured over years;
- the creation of training samples and processing automation archives into the universal and repeatable models.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khan, M.R.; de Bie, C.A.J.M.; van Keulen, H.; Smaling, E.M.A. Disaggregating and mapping crop statistics using hypertemporal remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2010, 12, 36–46. [Google Scholar] [CrossRef]
- Kowalik, W.; Dabrowska-Zielinska, K.; Meroni, M.; Raczka, U.T.; de Wit, A. Yield estimation using SPOT-VEGETATION products: A case study of wheat in European countries. Int. J. Appl. Earth Obs. Geoinf. 2014, 32, 228–239. [Google Scholar] [CrossRef]
- Aronoff, S. Remote Sensing for GIS Managers; ESRI Press: Redlands, CA, USA, 2005; pp. 338–348. [Google Scholar]
- Bochenek, Z.; Ciołkosz, A.; Filipiak, K. Szacowanie powierzchni upraw z wykorzystaniem teledetekcji lotniczej i satelitarnej. Fotointerpret. Geografii. Probl. Telegeoinformacji 2000, 31, 129–136. [Google Scholar]
- Matton, N.; Sepulcre Canto, G.; Waldner, F.; Valero, S.; Morin, D.; Inglada, J.; Arias, M.; Bontemps, S.; Koetz, B.; Defourny, P. An Automated Method for Annual Cropland Mapping along the Season for Various Globally-Distributed Agrosystems Using High Spatial and Temporal Resolution Time Series. Remote Sens. 2015, 7, 13208–13232. [Google Scholar] [CrossRef] [Green Version]
- Foerester, S.; Kaden, K.; Foerester, M.; Itzerott, S. Crop type mapping using spectral-temporal profiles and phenological information. Comput. Electron. Agric. 2012, 89, 30–40. [Google Scholar] [CrossRef] [Green Version]
- Atzberger, C. Advances in Remote Sensing of Agriculture: Context Description, Existing Operational Monitoring Systems and Major Information Needs. Remote Sens. 2013, 5, 949–981. [Google Scholar] [CrossRef] [Green Version]
- Dabrowska-Zielinska, K.; Meroni, M.; Atzberger, C.; Léo, O. Monitoring agriculture and agri-environmental conditions with Earth Observation. Int. J. Appl. Earth Obs. Geoinf. Pref. Spec. Issue 2014. [Google Scholar]
- Devos, W.; Fasbender, D.; Lemoine, G.; Loudjani, P.; Milenov, P.; Wirnhardt, C. Disscusion Document on the Introduction of Monitoring to Substitute OTSC; JRC Technical Report DS/CDP/2017/03; Publications Office of the European Union: Luxembourg, 2017. [Google Scholar]
- eoPortal. Available online: https://earth.esa.int/web/eoportal/satellite-missions/ (accessed on 30 May 2021).
- Schowengerdt, R.A. Remote Sensing. Models and Methods for Image Processing, 3rd ed.; Elsevier Academic Press: Burlington, MA, USA, 2007; pp. 387–427. [Google Scholar]
- Rudin, C. Stop Explaining Black Box Machine Learning Models for High Stakes Decisions and Use Interpretable Models Instead. Nat. Mach. Intell. 2019, 1, 206–215. [Google Scholar] [CrossRef] [Green Version]
- Jensen, J.R. Introductory Digital Image Processing. A Remote Sensing Perspective, 4th ed.; Pearson: London, UK, 2016; pp. 361–457. [Google Scholar]
- Vieira, C.A.O.; Mather, P.; Aplin, P. Agricultural Crop Classification Using the Spectral-Temporal Response Surface. In Proceedings of the Anais XI SBSR, Belo Horizonte, Brasil, 5–10 April 2003; pp. 255–262. [Google Scholar]
- Ormeci, C.; Alganci, U.; Sertel, E. Identification of Crop Areas using SPOT-5 Data. In Proceedings of the FIG Congress, Sydney, NSW, Australia, 11–16 April 2010; pp. 1–12. [Google Scholar]
- Yang, C.; Everitt, J.H.; Murden, D. Evaluating high resolution SPOT 5 satellite imagery for crop identification. Comput. Electron. Agric. 2011, 75, 347–354. [Google Scholar] [CrossRef]
- Inglada, J.; Arias, M.; Tardy, B.; Hagolle, O.; Valero, S.; Morin, D.; Dedieu, G.; Sepulcre, G.; Bontemps, S.; Defourny, P.; et al. Assessment of an Operating System for Crop Type Map Production Using High Temporal and Spatial Resolution Satellite Optical Imagery. Remote Sens. 2015, 7, 12356–12379. [Google Scholar] [CrossRef] [Green Version]
- Valero, S.; Morin, D.; Inglada, J.; Sepulcre, G.; Arias, M.; Hagolle, O.; Dedieu, G.; Bontemps, S.; Defourny, P.; Koetz, B. Production of a Dynamic Cropland Mask by Processing Remote Sensing Images at High Temporal and Spatial Resoluion. Remote Sens. 2016, 8, 55. [Google Scholar] [CrossRef] [Green Version]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data. Principles and Practices, 2nd ed.; CRC Press, Taylor & Francis Group: New York, NY, USA, 2009. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning Internal Representation by Error Propagation. Parallel Distributed Processing: Explorations in the Microstructure of Cognition; MIT Press: Cambridge, MA, USA, 1986; Volume I, pp. 318–362. [Google Scholar]
- Belgiu, M.; Dragut, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Brisco, B.; Brown, R.J. Multidate SAR/TM Synergism for Crop Classification in Western Canada. Photogramm. Eng. Remote Sens. 1995, 61, 1009–1014. [Google Scholar]
- Blaschke, T.; Lang, S.; Lorup, E.; Strobl, J.; Zeil, P. Object-oriented image processing in an integrated GIS/remote sensing environment and perspectives for environmental applications. Environ. Inf. Plan. Politics Public 2000, 2, 555–570. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Lambert, M.-J.; Traore, P.C.S.; Blaes, X.; Defourny, P. Estimating smallholder crops production at village level from Sentinel-2 time series in Mali’s cotton belt. Remote Sens. Environ. 2018, 216, 647–657. [Google Scholar] [CrossRef]
- Shelestov, A.; Lavreniuk, M.; Kolotii, A.; Vasiliev, V.; Shumilo, L.; Kussul, N. Cloud Approach to Automated Crop Classification using Sentinel 1 Imagery. In Proceedings of the Conference on Big Data from Space (BiDS’17), Toulouse, France, 28–30 November 2017; p. 122. [Google Scholar]
- Grabska, E. Ocena możliwości wykorzystania satelitarnych danych optycznych i radarowych do identyfikacji typów użytków rolnych. Pr. Geogr. 2017, 148, 135–155. [Google Scholar] [CrossRef]
- Inglada, J.; Vincent, A.; Arias, M.; Marais-Sicre, C. Improved Early Crop Type Identification by Joint Use of High Temporal Resolution SAR and Optical Image Time Series. Remote Sens. 2016, 8, 362. [Google Scholar] [CrossRef] [Green Version]
- Sitokonstantinou, V.; Papoutsis, I.; Kontoes, C.; Arnal, A.L.; Armesto Andrés, A.P.; Garraza Zurbano, J.A. Scalable Parcel-Based Crop Identification Scheme Using Sentinel-2 Data Time-Series for the Monitoring of the Common Agricultural Policy. Remote Sens. 2018, 10, 911. [Google Scholar] [CrossRef] [Green Version]
- Asgarian, A.; Soffianian, A.; Pourmanafi, S. Crop type mapping in a highly fragmented and heterogeneous agricultural landscape: A case of central Iran using multi-temporal Landsat 8 imagery. Comput. Electron. Agric. 2016, 127, 531–540. [Google Scholar] [CrossRef]
- Schmedtmann, J.; Campagnolo, M.L. Reliable Crop Identification with Satellite Imagery in the Context of Common Agriculture Policy Subsidy Control. Remote Sens. 2015, 7, 9325–9346. [Google Scholar] [CrossRef] [Green Version]
- Kussul, N.; Lemoine, G.; Gallego, J.; Skakun, S.; Lavreniuk, M. Parcel Based Classification for Agricultural Mapping and Monitoring using Multi-Temporal Satellite Image Sequences. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 165–168. [Google Scholar] [CrossRef]
- Stankiewicz, K. The Efficiency of Crop Recognition on ENVISAT ASAR Images in Two Growing Seasons. IEEE Trans. Geosci. Remote Sens. 2006, 44, 806–814. [Google Scholar] [CrossRef]
- Ban, Y. Synergy of Multitemporal ERS-1 SAR and Landsat TM Data for Classification of Agricultural Crop. Can. J. Remote Sens. 2003, 29, 518–526. [Google Scholar] [CrossRef]
- Iannini, L.; Molijn, R.A.; Hanssen, R.F. Integration of Multispectral and C-Band SAR Data for Crop Classification. In Proceedings of the SPIE Dresden, Germany, Remote Sensing for Agriculture, Ecosytems, and Hydrology XV, 16 October 2013; Volume 8887, p. 88871D. [Google Scholar] [CrossRef] [Green Version]
- Waldner, F.; Lambert, M.-J.; Li, W.; Weiss, M.; Demarez, V.; Morin, D.; Marais-Sicre, C.; Hagolle, O.; Baret, F.; Defourny, P. Land cover and crop type classification along the season based on biophysical variables retrieved from multi-sensor high-resolution time series. Remote Sens. 2015, 7, 10400–10424. [Google Scholar] [CrossRef] [Green Version]
- Belgiu, M.; Csillik, O. Sentinel-2 cropland mapping using pixel-based and object-based time-weighted dynamic time warping analysis. Remote Sens. Environ. 2018, 204, 509–523. [Google Scholar] [CrossRef]
- Li, M.; Ma, L.; Blaschke, T.; Cheng, L.; Tiede, D. A systematic comparison of different object-based classification techniques using high spatial resolution imagery in agricultural environments. Int. J. Appl. Earth Obs. Geoinf. 2016, 49, 87098. [Google Scholar] [CrossRef]
- Ok, A.; Akar, O.; Gungor, O. Evaluation of random forest method for agricultural crop classification. Eur. J. Remote Sens. 2012, 45, 421–432. [Google Scholar] [CrossRef]
- De Wit, A.; Clevers, J. Efficiency and accuracy of per-field classification for operational crop mapping. Int. J. Remote Sens. 2004, 25, 4091–4112. [Google Scholar] [CrossRef]
- Castillejo-González, I.; López-Granados, F.; García-Ferrer, A.; Peña Barragán, J.; Jurado-Expósito, M.; de la Orden, M.; Gonzaález-Audicana, M. Object—and pixel-based analysis for mapping crops and their agro-environmental associated measures using QuickBird imagery. Comput. Electron. Agric. 2009, 68, 207–215. [Google Scholar] [CrossRef]
- Marshall, M.; Husak, G.; Michaelsen, J.; Funk, C.; Pedreros, D.; Adoum, A. Testing a high-resolution satellite interpretation technique for crop area monitoring in developing countries. Int. J. Remote Sens. 2011, 32, 7997–8012. [Google Scholar] [CrossRef]
- Saini, R.; Ghosh, S.K. Crop classification on single date sentinel-2 imagery using random forest and suppor vector machine. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences, Dehradun, India, 20–23 November 2018. [Google Scholar] [CrossRef] [Green Version]
- Maponya, M.G.; van Niekerk, A.; Mashimbye, Z.E. Pre-harvest classification of crop types using a Sentinel-2 time-series and machine learning. Comput. Electron. Agric. 2020, 169, 105164. [Google Scholar] [CrossRef]
- Data and Information Access Services. Available online: https://www.copernicus.eu/en/access-data/dias (accessed on 24 September 2021).
- Google Earth Engine. Available online: https://earthengine.google.com/ (accessed on 24 September 2021).
- QGIS. A Free and Open Source Geographic Information System. Available online: https://qgis.org (accessed on 24 September 2021).
- STEP—Scientific Toolbox Exploitation Platform. Available online: https://step.esa.int/ (accessed on 24 September 2021).
- Pluto-Kossakowska, J.; Pilarska, M.; Bartkowiak, P. Automatic detection of dominant crop types in Poland based on satellite images. Artif. Satell. 2020, 55, 185–208. [Google Scholar] [CrossRef]
- Immitzer, M.; Vuolo, F.; Atzberger, C. First Experience with Sentinel-2 Data for Crop and Tree Classifications in Central Europe. Remote Sens. 2016, 8, 166. [Google Scholar] [CrossRef]
- Vuolo, F.; Neuwirth, M.; Immitzer, M.; Atzberger, C.; Ng, W.T. How much does multi-temporal Sentinel-2 data improve crop type classification? Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 122–130. [Google Scholar] [CrossRef]
- Conrad, C.; Dech, S.; Dubovyk, O.; Fritsch, S.; Klein, D.; Löw, F.; Zeidler, J. Derivation of temporal windows for accurate crop discrimination in heterogeneous croplands of Uzbekistan using multitemporal RapidEye images. Comput. Electron. Agric. 2014, 103, 63–74. [Google Scholar] [CrossRef]
- Stefanski, J.; Mack, B.; Waske, B. Optimization of object-based image analysis with Random Forests for land cover mapping. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2429–2504. [Google Scholar] [CrossRef]
- Sonobe, R.; Yamaya, Y.; Tani, H.; Wang, X.; Kobayashi, N.; Mochizuki, K. Crop classification from Sentinel-2-derived vegetation indices using ensemble learning. J. Appl. Remote Sens. 2018, 12, 026019. [Google Scholar] [CrossRef] [Green Version]
- Ustuner, M.; Sanli, F.B.; Abdikan, S.; Esetlili, M.T.; Kurucu, Y. Crop type classification using vegetation indices of RapidEye imagery. In Proceedings of the The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Istanbul, Turkey, 9 September–2 October 2014; Volume 40, pp. 195–198. [Google Scholar] [CrossRef] [Green Version]
- Laine, J. Crop Identification with Sentinel-2 Satellite Imagery in Finland. Master’s Thesis, Aalto University, Espoo, Finland, July 2018. Available online: https://aaltodoc.aalto.fi/bitstream/handle/123456789/33726/master_Laine_Joona_2018.pdf?sequence=2 (accessed on 30 May 2021).
- Ji, S.; Zhang, C.; Xu, A.; Shi, Y.; Duan, Y. 3D Convolutional Neural Networks for Crop Classification with Multi-Temporal Remote Sensing Images. Remote Sens. 2018, 10, 75. [Google Scholar] [CrossRef] [Green Version]
- Skakun, S.; Kussul, N.; Shelestov, A.; Lavreniuk, M.; Kassul, O. Efficiency Assessmnet of Multitemporal C-band Radarsat-2 Intensity and Landsat-8 Surface Reflectance Satellite Imagery for Crop Classification in Ukraine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3712–3719. [Google Scholar] [CrossRef]
- Mazzia, V.; Khaliq, A.; Chiaberge, M. Improvement in Land Cover and Crop Classification based on Temporal Features Learning from Sentinel-2 Data Using Recurrent-Convolutional Neural Network (R-CNN). Appl. Sci. 2019, 10, 238. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Zhang, Z.; Feng, L.; Ma, Y.; Du, Q. A new attention-based CNN approach for crop mapping using time series Sentinel-2 images. Comput. Electron. Agric. 2021, 184, 106090. [Google Scholar] [CrossRef]
- Barrett, R.; Crowther, P.; Laurence, R.; Lincolne, R. Agricultural Crop Identification Using Spot And Landsat Images In Tasmania. Int. Arch. Photogramm. Remote Sens. 2000, 33, 133–139. [Google Scholar]
- Feng, S.; Zhao, J.; Liu, T.; Zhang, H.; Zhang, Z.; Guo, X. Crop Type Identification and Mapping Using Machine Learning Algorithms and Sentinel-2 Time Series Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3295–3306. [Google Scholar] [CrossRef]
- Turker, M.; Ozdarici, A. Field-based crop classification using SPOT4, SPOT5, IKONOS and QuickBird imagery for agricultural areas: A comparison study. Int. J. Remote Sens. 2011, 32, 9735–9768. [Google Scholar] [CrossRef]
- Kussul, N.; Skakun, S.; Shelestov, A.; Lavreniuk, M.; Yailymov, B.; Kussul, O. Regional scale crop mapping using multi-temporal satellite imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 45. [Google Scholar] [CrossRef] [Green Version]
- Mróz, M.; Ciołkowska, M. Porównanie możliwości identyfikacji upraw rolniczych na podstawie serii obrazów radarowych ENVISAT/ASAR/IMG i APG oraz wielospektralnych obrazów SPOT XS/XI. Arch. Fotogram. Kartogr. I Teledetekcji 1999, 9, 201–215. [Google Scholar]
- Orynbaikyzy, A.; Gessner, U.; Conrad, C. Crop type classification using a combination of optical and radar remote sensing data: A review. Int. J. Remote Sens. 2019, 40, 6553–6595. [Google Scholar] [CrossRef]
- Sen2Agri—Czech Agriculture National Demonstrator (CzechAgri) Final Report 20/02/2017. Available online: https://www.esa-sen2agri.org/ (accessed on 30 March 2021).
- Bontemps, S.; Bajec, K.; Cara, C.; Defourny, P.; De Vendictis, L.; Heymans, D.; Kucera, L.; Malcorps, P.; Milcinski, G.; Nicola, L.; et al. Sen4CAP—Sentinels for Common Agricultural Policy. System Software User Manual. Sen4CAP_SUM_v1.2. ESA. Available online: http://esa-sen4cap.org/sites/default/files/Sen4CAP_System-Software-User-Manual_v1.1.pdf (accessed on 20 December 2020).
- Precision Farming Apps Based on Satellite Imagery and Machine Learning Technologies. Available online: https://onesoil.ai/en/technologies (accessed on 30 May 2021).
- Jaafar, H.H.; Ahmad, F.A. Crop yield prediction from remotely sensed vegetation indices and primary productivity in arid and semi-arid lands. Int. J. Remote Sens. 2015, 36, 4570–4589. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Resolution | Imaging Width | |
|---|---|---|---|
| Panchromatic Mode | Multispectral Mode (Number of Bands) | ||
| LR–category 1 | |||
| NOAA AVHRR | - | 1 km/8 km (6) | 2400 km |
| (Vegetation] | - | 1.15 km (4) | 2000 km |
| MODIS/Terra | - | 250 m/500 m/1 km (36) | 2330 km |
| HR–category 2 | |||
| SPOT 1–4 | 10 m | 20 m (3–4) | 60 km |
| SPOT 5 | 2.5 m/5 m | 10 m (4) | 60 km |
| SPOT 6–7 | 1.50 m | 6 m (4) | 60 km |
| Landsat 7–8 | 15 m | 30 m (6–8) | 185 km |
| Sentinel 2 | - | 10 m/20 m/60 m (13) | 290 km |
| Gaofen 1–2 | 2 m | 8 m (4) | 93 km |
| VHR–category 3 | |||
| Ikonos | 0.82 m | 3.20 m (4) | 11 km |
| Quick Bird | 0.65 m | 2.62 m (4) | 16 km |
| Geo Eye | 0.46 m | 1.84 m (4) | 15 km |
| World View 1–3 | 0.46–0.31 m | 1.84–1.24 m (8) | 13 km |
| Pleiades/Pleiades Neo | 0.50 m/0.30 m | 2 m/1.2 m (4/6) | 20 km/14 km |
| Super View | 0.50 m | 2 m (4) | 12 km |
| Classifier | Landsat TM/ETM/OLI Country [Reference] | Sentinel-2, S2 + L8 Country [Reference] | SPOT5/RapidEye Country [Reference] |
|---|---|---|---|
| RF | 79% Poland [51] | 80% Mali [27] | 74% Pakistan [45] |
| 90% France [45] | 83% Austria [52] 96% Austria [53] | 86% Uzbekistan [54] | |
| 90% Argentina [30] | 84% India [45] | 87% Germany [55] 87% Luxemburg [55] | |
| 90% South Africa [30] | 86–91% Poland [51] | 94% France, Belgium, Ukraine [18] | |
| 90% USA [30] | 89% Spain [31] | ||
| 89% Japan [56] | |||
| SVM | 84% Portugal [33] | 83% South Africa [46] | 87% Turkey [57] |
| 86% France, China [17] | 82% India [45] | 90% USA [16] | |
| 90% Argentina, South Africa, USA [17] | 91% Spain [31] | ||
| 92% Iran [32] | 91% Japan [56] | ||
| ANN | 85% Ukraine [34] | 91% Finland [58] | 95% China, Gaofen1–2 [59] |
| 86% Ukraine [60] | 96% Italy [61] | ||
| 89% Canada [36] | 98% China [62] | ||
| MXL | 70% Tasmania [63] | 89% China [64] | 78% Turkey [65] |
| 73% Germany [6] | 86% USA [16] | ||
| 90% Canada [24] | 92% Canada [45] |
| Class Name | Maize | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| UA (%) | 60% | 77% | 80% | 88% | 92% | 93% | 87% | 89% | 98% | 99% | 82% | 90% | 96% |
| Classifier | RF | RF | RF | RF | RF | RF | ANN | ANN | ANN | ANN | SVM | SVM | SVM |
| Data [source] | L8 [30] | S2 [52] | S2 [56] | S2 [27] | S5 [55] | S2 [31] | L8 [34] | L8 [60] | S2 [61] | S2 [62] | S2 [66] | TM [33] | S2 [31] |
| Class name | Grassland | ||||||||||||
| UA (%) | 76% | 77% | 91% | 93% | 63% | 68% | 89% | 68% | 80% | 83% | 94% | 96% | |
| Classifier | RF | RF | RF | RF | ANN | ANN | ANN | SVM | SVM | SVM | SVM | SVM | |
| Data [source] | L8 [30] | S2 [31] | S2 [56] | S5 [55] | L8 [60] | S2 [61] | L8 [34] | TM [33] | L8 [32] | S2 [31] | S2 [56] | S2 [46] | |
| Class name | Winter cereals | ||||||||||||
| UA (%) | 98% | 68% | 88% | 92% | 93% | 72% | 87% | 90% | |||||
| Classifier | ANN | RF | RF | RF | RF | SVM | SVM | SVM | |||||
| Data [source] | S2 [58] | S5 [55] | S2 [31] | L8 [51] | S2 [52] | TM [33] | L8 [32] | S2 [31] | |||||
| Class name | Spring cereals | ||||||||||||
| UA (%) | 39% | 64% | 16% | 89% | 90% | 94% | 53% | 90% | |||||
| Classifier | ANN | ANN | RF | RF | RF | RF | SVM | SVM | |||||
| Data [source] | L8 [34] | L8 [60] | S5 [55] | L8 [51] | S2 [31] | S2 [58] | TM [33] | S2 [31] | |||||
| Class name | Rapeseed | ||||||||||||
| UA (%) | 76% | 86% | 95% | 96% | 96% | 99% | 96% | ||||||
| Classifier | RF | RF | RF | RF | ANN | ANN | SVM | ||||||
| Data [source] | S5 [55] | L8 [51] | S2 [31] | L8 [30] | L8 [60] | L8 [34] | S2 [31] | ||||||
| Class name | Sunflower | ||||||||||||
| UA (%) | 67% | 85% | 63% | 67% | 92% | 95% | |||||||
| Classifier | ANN | ANN | RF | RF | RF | SVM | |||||||
| Data [source] | L8 [60] | L8 [34] | L8 [30] | S2 [52] | S2 [31] | S2 [31] | |||||||
| Class name | Black fallow land | ||||||||||||
| UA (%) | 80% | 75% | 78% | 96% | 49% | ||||||||
| Classifier | ANN | MXL | RF | RF | SVM | ||||||||
| Data [source] | TM [14] | TM [24] | L8 [30] | RE [54] | TM [33] | ||||||||
| Class name | Potatoes | ||||||||||||
| UA (%) | 96% | 20% | 81% | 85% | 94% | ||||||||
| Classifier | ANN | RF | RF | SVM | SVM | ||||||||
| Data [source] | TM [14] | S5 [55] | S2 [56] | S2 [56] | L8 [32] | ||||||||
| Class name | Sugar beets | ||||||||||||
| UA (%) | 70% | 94% | 79% | 84% | 96% | ||||||||
| Classifier | ANN | ANN | RF | RF | SVM | ||||||||
| Data [source] | L8 [60] | L8 [34] | L8 [51] | S5 [55] | S2 [56] | ||||||||
| Method Data | RF | SVM | ANN |
|---|---|---|---|
| Landsat | 79% [30] | 76% [33] 85% [32] | 92% [34] 98% [60] |
| Sentinel2 | 83% [31] 95% [44] | 91% [31] 96% [56] | 98% [61] 90–99% [62] |
| SPOT5/RE | 88% [55] 89% [52] |
| Algorithm | Disadvantages | Advantages |
|---|---|---|
| RF | Increase in the amount of training data does not increase accuracy; Difficulty interpreting the results; Variability of the results | Effective for big data sets and small amount of training samples; Low sensitivity to the amount of data input, resistance to “noise”; Lack of overfitting (resistance to overtraining); Low number of parameters defined by the user; Analysis of feature (variable) importance; Low computational requirements |
| SVM | Multitude of parameters to be optimised; Difficulty building a universal model; Sensitivity to feature (variable) choice; High computational requirements | Accuracy even for a low number of training grounds, including mixels; Possibility of adjusting parameters to specific cases (optimisation) |
| ANN | Long period of building and optimising the network; Large training set required; Relatively long computation process; Possibility of “overtraining” | High tolerance to lack of data, weak representation or noise interference in the training data; Adaptive learning from the training data streams–minimising errors; Varied types of variables used in the model |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pluto-Kossakowska, J. Review on Multitemporal Classification Methods of Satellite Images for Crop and Arable Land Recognition. Agriculture 2021, 11, 999. https://doi.org/10.3390/agriculture11100999
Pluto-Kossakowska J. Review on Multitemporal Classification Methods of Satellite Images for Crop and Arable Land Recognition. Agriculture. 2021; 11(10):999. https://doi.org/10.3390/agriculture11100999
Chicago/Turabian StylePluto-Kossakowska, Joanna. 2021. "Review on Multitemporal Classification Methods of Satellite Images for Crop and Arable Land Recognition" Agriculture 11, no. 10: 999. https://doi.org/10.3390/agriculture11100999
APA StylePluto-Kossakowska, J. (2021). Review on Multitemporal Classification Methods of Satellite Images for Crop and Arable Land Recognition. Agriculture, 11(10), 999. https://doi.org/10.3390/agriculture11100999