
Study the Parametric Effect of Pulling Pattern on Cherry Tomato Harvesting Using RSM-BBD Techniques


Abstract
:1. Introduction
2. Materials and Methods
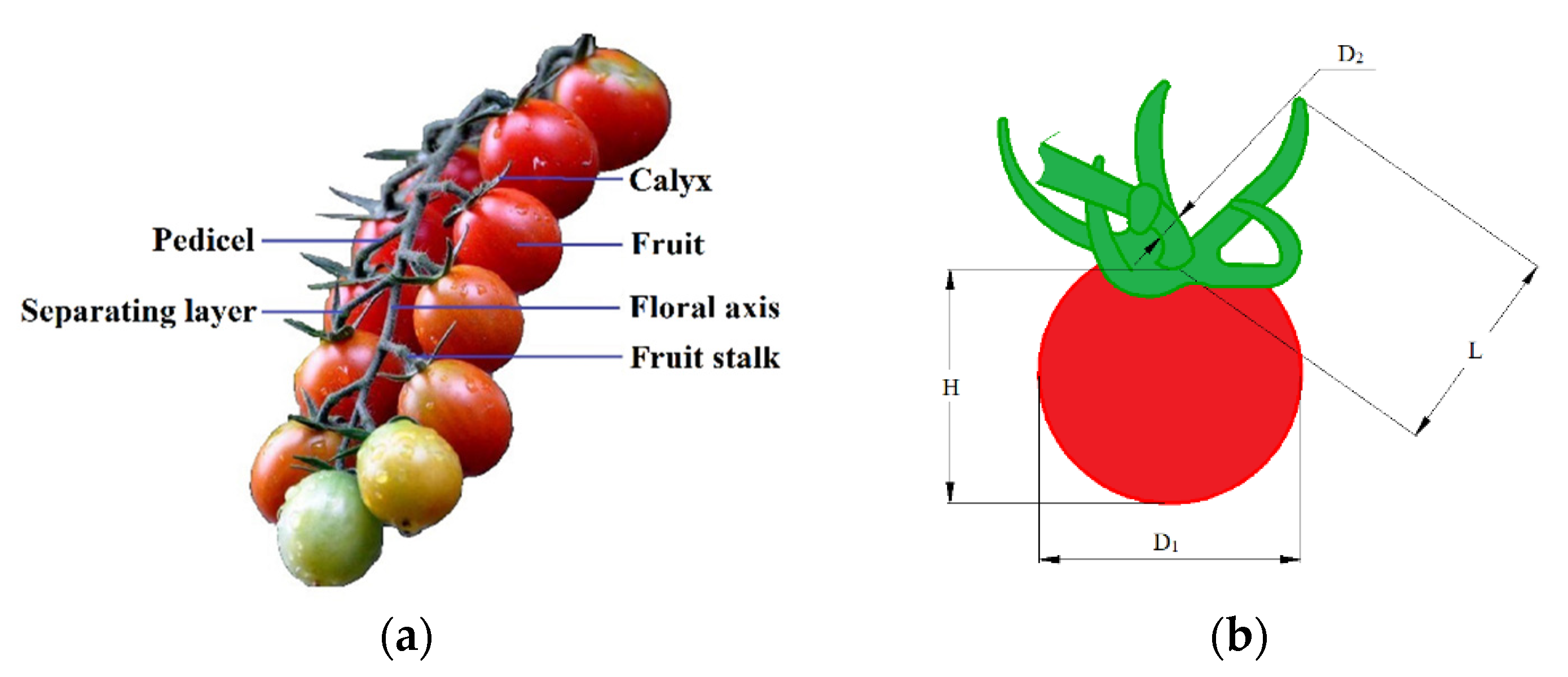
2.1. Cherry Tomato Samples
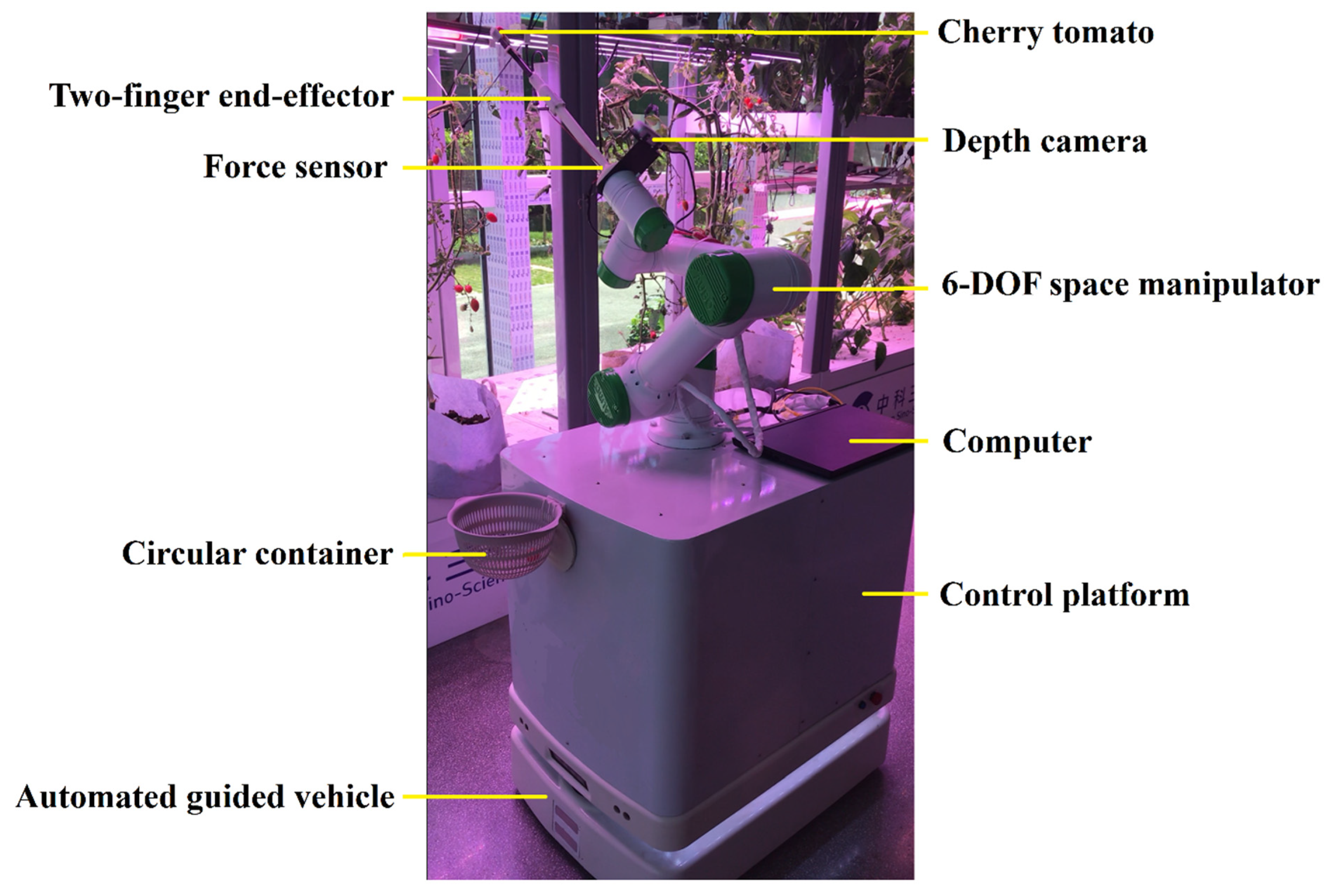
2.2. Main Instruments and Equipment
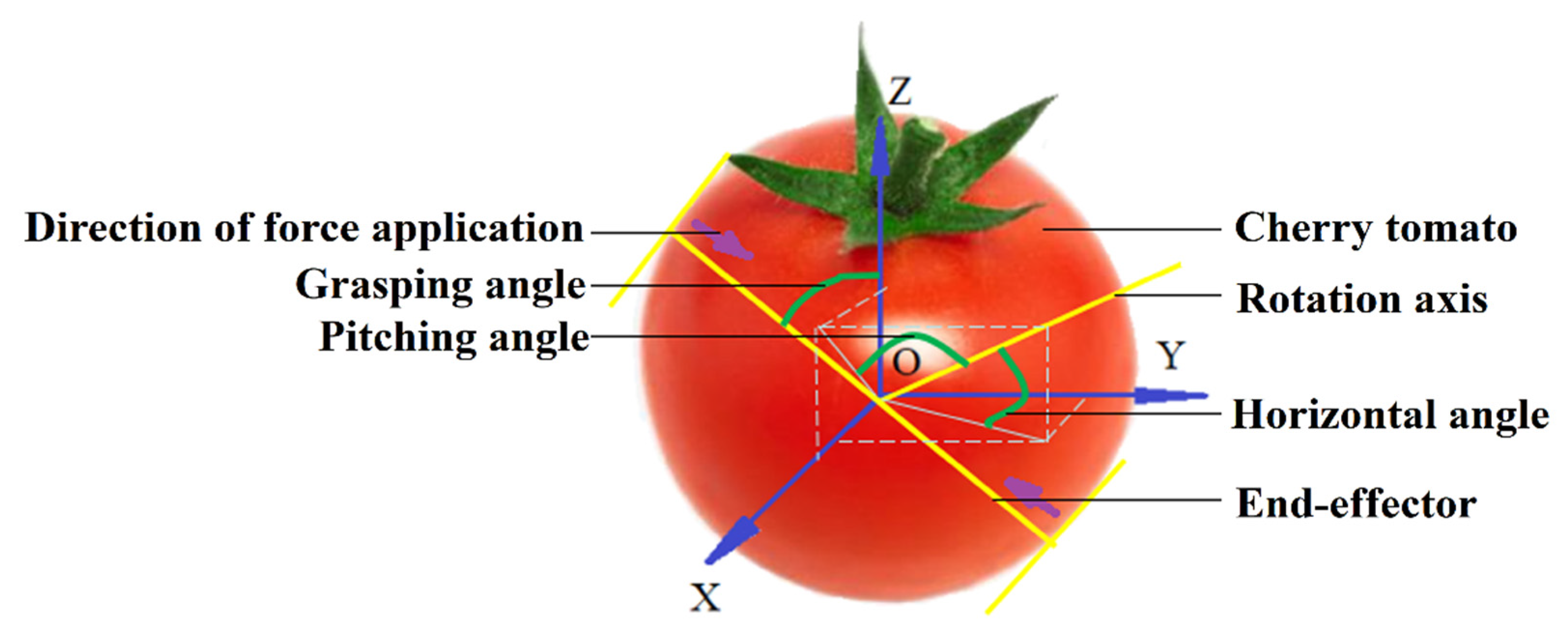
2.3. Experimental Method of Cherry Tomato Harvesting
3. Experimental Design
Response Surface Design
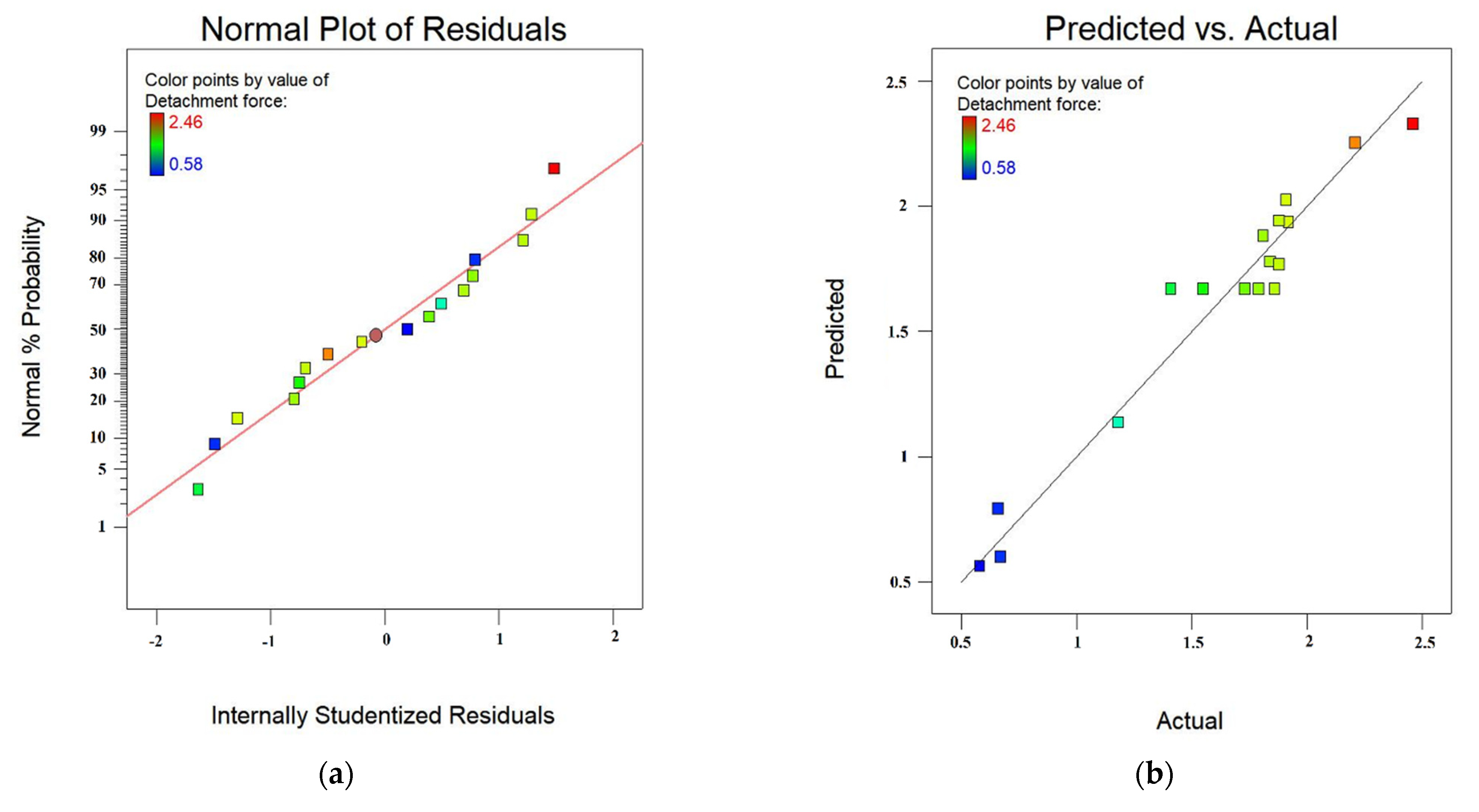
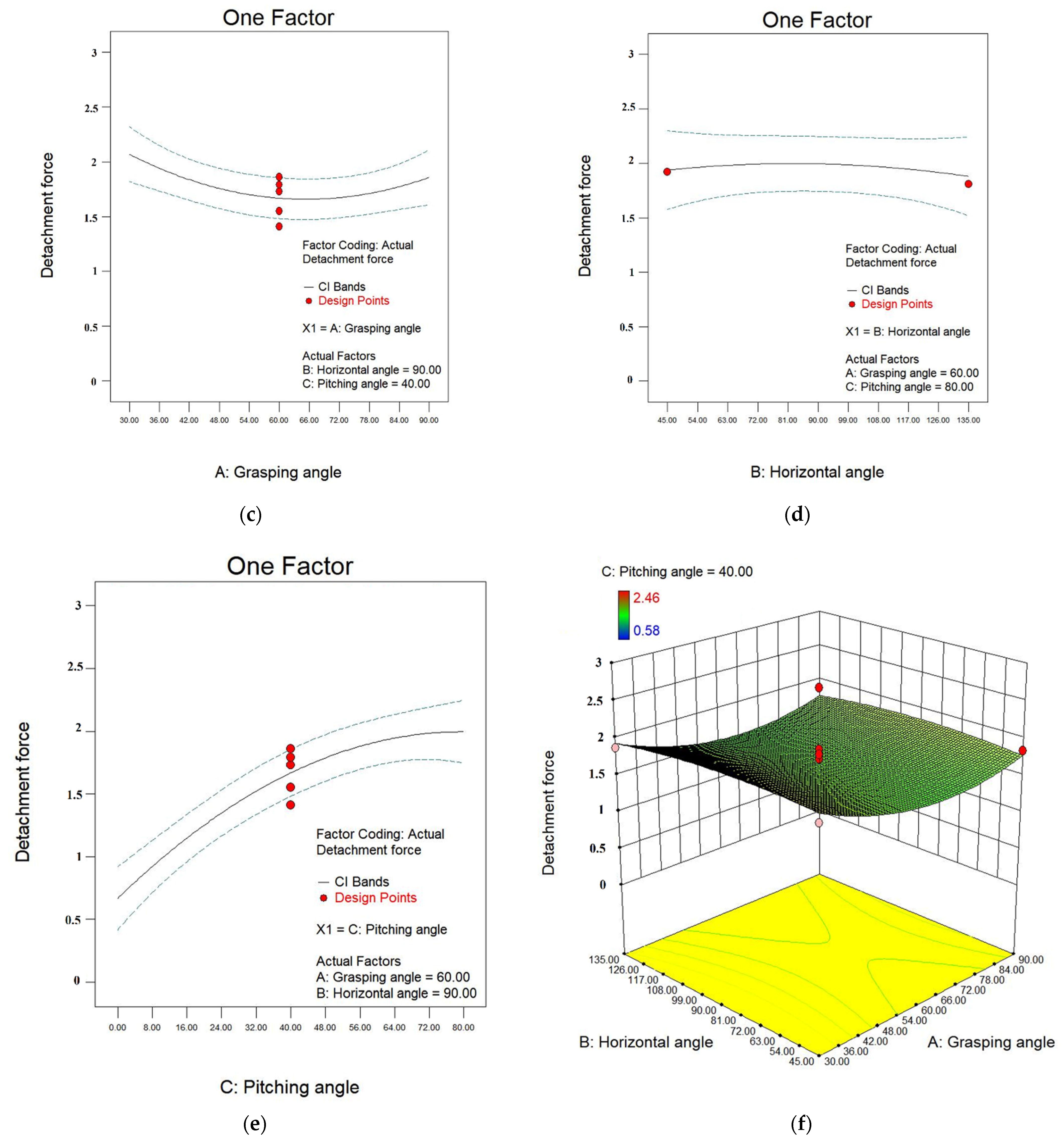
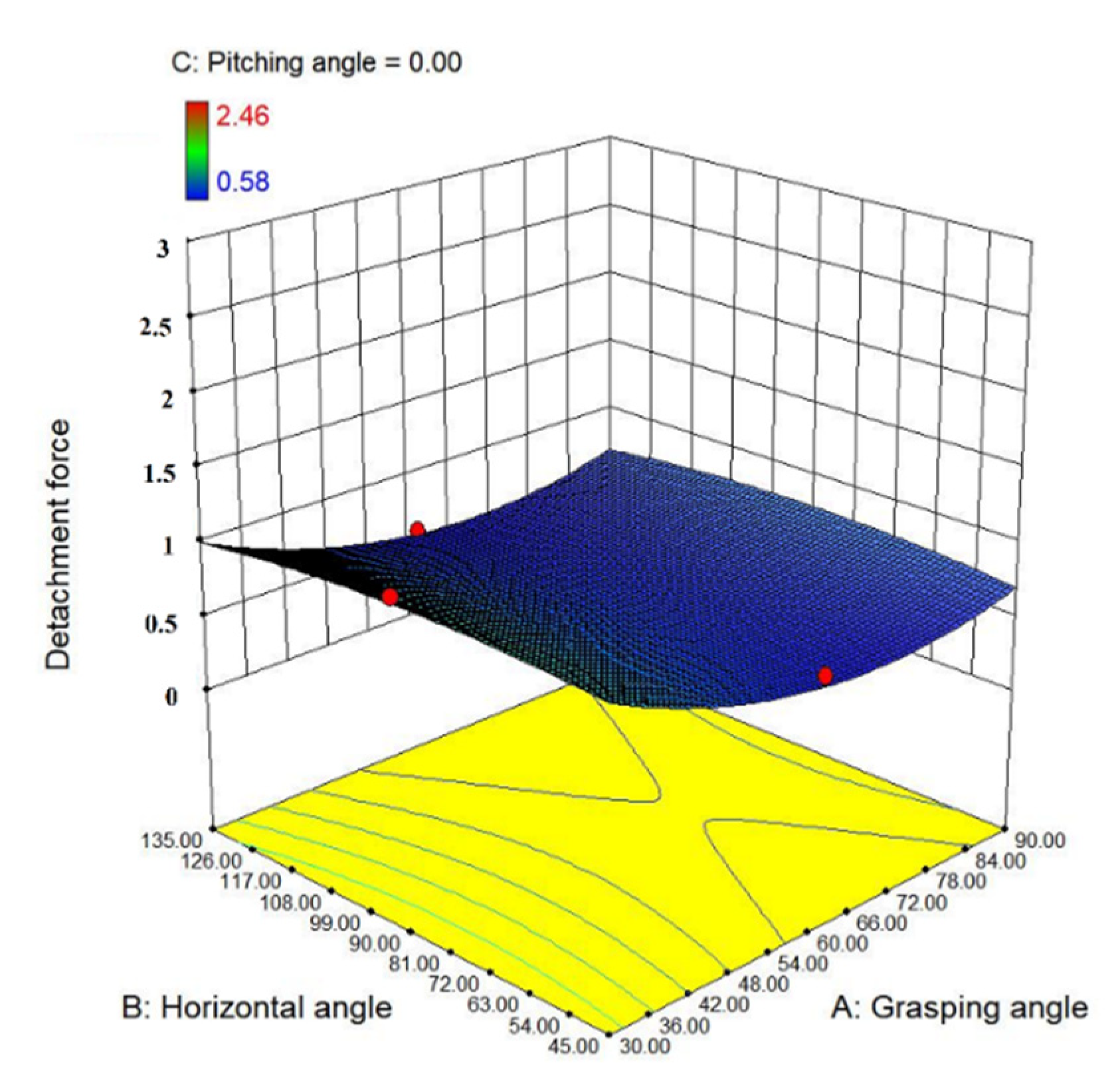
4. Results and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, Z.; Li, P.; Liu, J. Physical and mechanical properties of tomato fruits as related to robot’s harvesting. J. Food Eng. 2011, 103, 170–178. [Google Scholar] [CrossRef]
- Li, Z.; Li, P.; Yang, H.; Liu, J.; Xu, Y. Mechanical properties of tomato exocarp, mesocarp and locular gel tissues. J. Food Eng. 2012, 111, 82–91. [Google Scholar] [CrossRef]
- Sanders, K.F. Orange harvesting systems review. Biosyst. Eng. 2005, 90, 115–125. [Google Scholar] [CrossRef]
- Kondo, N.; Taniwaki, S.; Tanihara, K.; Yata, K.; Monta, M.; Kurita, M.; Tsutumi, M. An end-effector and manipulator control for tomato cluster harvesting robot. In Proceedings of the 2007 ASABE Annual International Meeting, Minneapolis, MN, USA, 17–20 June 2007. [Google Scholar]
- Monta, M.; Kondo, N.; Ting, K.C.; Giacomelli, G.A.; Mears, D.R.; Kim, Y.; Ling, P.P. Harvesting end effector for inverted single truss tomato production systems. J. Jpn. Soc. Agric. Machinery 1998, 60, 97–104. [Google Scholar]
- Bac, C.W.; Hemming, J.; Van Tuijl, B.A.J.; Barth, R.; Wais, E.; Van Henten, E.J. Performance evaluation of a harvesting robot for sweet pepper. J. Field Robot. 2017, 34, 1123–1139. [Google Scholar] [CrossRef]
- Bloch, V.; Degani, A.; Bechar, A. A methodology of orchard architecture design for an optimal harvesting robot. Biosyst. Eng. 2018, 166, 126–137. [Google Scholar] [CrossRef]
- Li, J.; Karkee, M.; Zhang, Q.; Xiao, K.H.; Feng, T. Characterizing apple picking patterns for robotic harvesting. Comput. Electron. Agric. 2016, 127, 633–640. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.G.; Miao, F.L.; Yang, Z.B.; Chai, P.P.; Yang, S.J. Factors affecting human hand grasp type in tomato fruit-picking: A statistical investigation for ergonomic development of harvesting robot. Comput. Electron. Agric. 2019, 157, 90–97. [Google Scholar] [CrossRef]
- Diener, G.; Mohsenin, N.; Jenks, B. Vibration characteristics of trellis-trained apple trees with reference to fruit detachment. Trans. ASAE 1965, 8, 20–24. [Google Scholar] [CrossRef]
- So, J.D. Vibratory harvesting machine of boxthorn (Lycium chinense mill) berries. Trans. ASAE 2003, 46, 211–221. [Google Scholar]
- Dimeas, F.; Sako, D.V. Design and fuzzy control of a robotic gripper for efficient strawberry harvesting. Robotica 2015, 33, 1085–1098. [Google Scholar] [CrossRef]
- Yaguchi, H.; Nagahama, K.; Hasegawa, T.; Inaba, M. Development of an autonomous tomato harvesting robot with rotational plucking gripper. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE 2016, 46, 652–657. [Google Scholar]
- Liu, J.Z.; Hu, Y.; Xu, X.Q.; Li, P.P. Feasibility and influencing factors of laser cutting of tomato peduncles for robotic harvesting. Afr. J. Biotechnol. 2011, 10, 15552–15563. [Google Scholar] [CrossRef]
- Feng, Q.; Zou, W.; Fan, P.; Zhang, C.; Wang, X. Design and test of robotic harvesting system for cherry tomato. Int. J. Agric. Biol. Eng. 2018, 11, 96–100. [Google Scholar] [CrossRef]
- Zhang, B.; Zhou, J.; Meng, Y.; Zhang, N.; Gu, B.; Yan, Z.; Idris, S.I. Comparative study of mechanical damage caused by a two-finger tomato gripper with different robotic grasping patterns for harvesting robots. Biosyst. Eng. 2018, 171, 245–257. [Google Scholar] [CrossRef]
- Fadiji, T.; Coetzee, C.; Chen, L.; Chukwu, O.; Opara, U.L. Susceptibility of apples to bruising inside ventilated corrugated paperboard packages during simulated transport damage. Postharvest Biol. Technol. 2016, 118, 111–119. [Google Scholar] [CrossRef]
- He, L.; Fu, H.; Sun, D.; Karkee, M.; Zhang, Q. Shake-and-catch harvesting for fresh market apples in trellis-trained trees. Trans. Asabe 2017, 60, 353–360. [Google Scholar]
- Komarnicki, P.; Stopa, R.; Kuta, Ł.; Szyjewicz, D. Determination of apple bruise resistance based on the surface pressure and contact area measurements under impact loads. Comput. Electron. Agric. 2017, 142, 155–164. [Google Scholar] [CrossRef]
- Pascoal-Faria, P.; Pereira, R.; Pinto, E.; Belbut, M.; Rosa, A.; Sousa, I.; Alves, N. An integrated experimental and numerical approach to develop an electronic instrument to study apple bruise damage. World Academy of Science, Engineering and Technology. Int. J. Biol. Biomol. Agric. Food Biotechnol. Eng. 2016, 10, 379–383. [Google Scholar]
- Li, G.; Ji, C.; Gu, B.; Xu, W.; Dong, M. Kinematics analysis and experiment of apple harvesting robot manipulator with multiple end-effectors. Trans. Chin. Soc. Agric. Mach. 2016, 47, 14–29. [Google Scholar]
- Liu, J.Z.; Yun, P.; Muhammad, F. Experimental and theoretical analysis of fruit plucking patterns for robotic tomato harvesting. Comput. Electron. Agric. 2020, 173, 1–11. [Google Scholar] [CrossRef]
- Bac, C.W.; van Henten, E.J.; Hemming, J.; Edan, Y. Harvesting robots for high-value crops: State-of-the-art review and challenges ahead. J. Field Robot. 2015, 31, 888–911. [Google Scholar] [CrossRef]
- Roshanianfard, A.; Noguchi, N. Pumpkin harvesting robotic end-effector. Comput. Electron. Agric. 2020, 174, 105503. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Y.; Yang, C.; Zhao, H.; Chen, G.; Zhang, Z.; Fu, S.; Zhang, M.; Xu, H. End-effector with a bite mode for harvesting citrus fruit in random stalk orientation environment. Comput. Electron. Agric. 2019, 157, 454–470. [Google Scholar] [CrossRef]
- Bu, L.; Hu, G.; Chen, C.; Sugirbay, A.; Chen, J. Experimental and simulation analysis of optimum picking patterns for robotic apple harvesting. Sci. Hortic. 2019, 261, 108937. [Google Scholar] [CrossRef]
- Hayashi, S.; Shigematsu, K.; Yamamoto, S.; Kobayashi, K.; Kohno, Y.; Kamata, M. Evaluation of a strawberry-harvesting robot in a field test. Biosyst. Eng. 2010, 105, 160–171. [Google Scholar] [CrossRef]
- Henten, E.; Slot, D.; Hol, C.; Willigenburg, L. Optimal manipulator design for a cucumber harvesting robot. Comput. Electron. Agric. 2009, 65, 247–257. [Google Scholar] [CrossRef]
- Arad, B.; Balendonck, J.; Barth, R.; Ben-Shahar, O.; Edan, Y.; Hellström, T.; Hemming, J.; Kurtser, P.; Ringdahl, O.; Tielen, T.; et al. Development of a sweet pepper harvesting robot. J. Field Robot. 2020, 37, 1027–1039. [Google Scholar] [CrossRef]
- Van Henten, E.J.; Hemming, J.; Van Tuijl, B.A.; Kornet, J.G.; Meuleman, J.; Bontsema, J.; Van Os, E.A. An autonomous robot for harvesting cucumbers in greenhouses. Auton. Robot. 2002, 13, 241–258. [Google Scholar] [CrossRef]
- Blanes, C.; Ortiz, C.; Mellado, M.; Beltrán, P. Assessment of eggplant firmness with accelerometers on a pneumatic robot gripper. Comput. Electron. Agric. 2015, 113, 44–50. [Google Scholar] [CrossRef]
- Li, Z.; Li, P.; Yang, H.; Wang, Y. Stability tests of two-finger tomato grasping for harvesting robots. Biosyst. Eng. 2013, 116, 163–170. [Google Scholar] [CrossRef]
- Blume, T.; Van Meerveld, H.J.I. From hillslope to stream: Methods to investigate subsurface connectivity. Wiley Interdiscip. Rev. Water 2015, 2, 177–198. [Google Scholar] [CrossRef] [Green Version]
- Kumar, A.; Kumar, V.; Kumar, J. Multi-response optimization of process parameters based on response surface methodology for pure titanium using wedm process. Int. J. Adv. Manuf. Technol. 2013, 68, 2645–2668. [Google Scholar] [CrossRef]
- Gilman, E.F. Branch-to-stem diameter ratio affects strength of attachment. J. Arboric. 2013, 29, 291–294. [Google Scholar]
- Tong, J.; Zhang, Q.; Karkee, M.; Jiang, H.; Zhou, J. Understanding the dynamics of hand picking patterns of fresh market apples. In Proceedings of the ASABE and CSBE/SCGAB Annual International Meeting, Montreal, QC, Canada, 13–16 July 2014. [Google Scholar]
- Singh, K.; Pardeshi, I.; Kumar, M.; Srinivas, K.; Srivastva, A. Optimisation of machine parameters of a pedal-operated paddy thresher using RSM. Biosyst. Eng. 2008, 100, 591–600. [Google Scholar] [CrossRef]
- Stagnari, F.; Galieni, A.; Pisante, M. Shading and nitrogen management affect quality, safety and yield of greenhouse-grown leaf lettuce. Sci. Hortic. 2015, 192, 70–79. [Google Scholar] [CrossRef]
- Zhao, J.; Sugirbay, A.; Chen, Y.; Zhang, S.; Liu, F.; Bu, L.; Chen, Y.; Wang, Z.; Chen, J. FEM explicit dynamics simulation and NIR hyperspectral reflectance imaging for determination of impact bruises of Lycium barbarum L. Postharvest Biol. Technol. 2019, 155, 102–110. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | H (mm) | D1 (mm) | M (mm) | D2 (mm) | L (mm) | F (N) |
|---|---|---|---|---|---|---|
| Value | 34.64 ± 5.63 | 29.77 ± 5.14 | 18.75 ± 6.52 | 2.10 ± 0.53 | 71.42 ± 3.96 | 0.57 ± 0.31 |
| Symbols | Input Variables | Units | Values | ||
|---|---|---|---|---|---|
| Minimum | Medium | Maximum | |||
| X1 | Grasping angle | ° | 30 | 60 | 90 |
| X2 | Horizontal angle | ° | 45 | 90 | 135 |
| X3 | Pitching angle | ° | 0 | 40 | 80 |
| Run | Input Parameters | Output Response | ||
|---|---|---|---|---|
| Grasping Angle (X1) | Horizontal Angle (X2) | Pitching Angle (X3) | Detachment Force (Y) | |
| 1 | 90 | 90 | 80 | 2.21 |
| 2 | 60 | 135 | 0 | 0.58 |
| 3 | 60 | 90 | 40 | 1.41 |
| 4 | 60 | 45 | 0 | 0.67 |
| 5 | 60 | 135 | 80 | 1.81 |
| 6 | 30 | 135 | 40 | 1.88 |
| 7 | 30 | 90 | 0 | 1.18 |
| 8 | 60 | 90 | 40 | 1.79 |
| 9 | 60 | 90 | 40 | 1.86 |
| 10 | 60 | 90 | 40 | 1.73 |
| 11 | 90 | 90 | 0 | 0.66 |
| 12 | 90 | 135 | 40 | 1.88 |
| 13 | 60 | 90 | 40 | 1.55 |
| 14 | 90 | 45 | 40 | 1.84 |
| 15 | 30 | 90 | 80 | 2.46 |
| 16 | 30 | 45 | 40 | 1.91 |
| 17 | 60 | 45 | 80 | 1.92 |
| Items | Sum of Squares | DF | Mean Square | f-Value | p-Value |
|---|---|---|---|---|---|
| Model | 4.47 | 9 | 0.5 | 15.95 | <0.01 |
| X1 | 0.088 | 1 | 0.088 | 2.83 | 0.1364 |
| X2 | 4.51 × 10−3 | 1 | 4.51 × 10−3 | 0.14 | 0.7148 |
| X3 | 3.52 | 1 | 3.52 | 113.09 | <0.01 |
| X1X2 | 1.23 × 10−3 | 1 | 1.23 × 10−3 | 0.039 | 0.8485 |
| X1X3 | 0.018 | 1 | 0.018 | 0.58 | 0.4694 |
| X2X3 | 1.00 × 10−4 | 1 | 1.00 × 10−4 | 3.21 × 10−3 | 0.9564 |
| X12 | 0.37 | 1 | 0.37 | 11.84 | 0.0108 |
| X22 | 0.032 | 1 | 0.032 | 1.01 | 0.3482 |
| X32 | 0.48 | 1 | 0.48 | 15.3 | <0.01 |
| Residual | 0.22 | 7 | 0.031 | ||
| Lack of Fit | 0.082 | 3 | 0.027 | 0.8 | 0.5533 |
| Pure Error | 0.14 | 4 | 0.034 | ||
| Cor Total | 4.69 | 16 | |||
| Model Summary Statistics | |||||
| Std. Dev. | 0.18 | R-Squared | 0.9535 | ||
| Mean | 1.61 | Adj R-Squared | 0.8937 | ||
| C.V.% | 10.98 | Pred R-Squared | 0.6748 | ||
| PRESS | 1.53 | Adeq Precision | 13.045 | ||
| Name | Goal | Lower Limit | Upper Limit | Importance |
|---|---|---|---|---|
| Grasping angle (°) | is in range | 30 | 90 | 3 |
| Pitching angle (°) | is in range | 45 | 135 | 3 |
| Horizontal angle (°) | is in range | 0 | 80 | 3 |
| Detachment force(N) | Minimize | 0 | 2.46 | 3 |
| Number | X1 | X2 | X3 | Detachment Force (N) | Desirability |
|---|---|---|---|---|---|
| 1 | 67.84 | 135 | 0 | 0.54221 | 0.78 |
| 2 | 67.52 | 135 | 0 | 0.542246 | 0.78 |
| 3 | 67.27 | 135 | 0 | 0.542325 | 0.78 |
| 4 | 67.59 | 134.59 | 0.03 | 0.544893 | 0.778 |
| 5 | 65 | 135 | 0 | 0.544909 | 0.778 |
| 6 | 67.06 | 132.23 | 0 | 0.553648 | 0.775 |
| 7 | 73.8 | 135 | 0 | 0.553847 | 0.775 |
| 8 | 71.85 | 129.34 | 0 | 0.569333 | 0.769 |
| 9 | 69.56 | 45 | 0 | 0.569513 | 0.768 |
| 10 | 69.33 | 45.08 | 0 | 0.56983 | 0.768 |
| 11 | 71.39 | 45 | 0 | 0.570532 | 0.768 |
| 12 | 67.84 | 45 | 0 | 0.57057 | 0.768 |
| 13 | 68.75 | 45.39 | 0 | 0.571145 | 0.768 |
| 14 | 67.28 | 45 | 0 | 0.571327 | 0.768 |
| 15 | 65.97 | 45 | 0 | 0.573911 | 0.767 |
| 16 | 70.14 | 45 | 0.15 | 0.574725 | 0.766 |
| 17 | 74.14 | 45 | 0 | 0.576203 | 0.766 |
| 18 | 75.21 | 45 | 0 | 0.579754 | 0.764 |
| 19 | 69.12 | 45 | 0.43 | 0.584194 | 0.763 |
| 20 | 66.71 | 48.76 | 0 | 0.584924 | 0.762 |
| 21 | 56.45 | 135 | 0 | 0.584974 | 0.762 |
| 22 | 56.19 | 134.99 | 0 | 0.587001 | 0.761 |
| 23 | 69.68 | 50.4 | 0 | 0.587454 | 0.761 |
| 24 | 61.9 | 45.01 | 0 | 0.589164 | 0.761 |
| 25 | 69.46 | 56.03 | 0 | 0.603476 | 0.755 |
| Exp. no. | RSM Model Prediction(N) | Experimental Results (N) | Prediction Error (%) |
|---|---|---|---|
| 1 | 0.542249 | 0.56 ± 0.02 | 2.5 |
| 2 | 0.544909 | 0.52 ± 0.03 | 1.9 |
| 3 | 0.573911 | 0.61 ± 0.05 | 3.2 |
| 4 | 0.593594 | 0.56 ± 0.03 | 4.2 |
| 5 | 0.600328 | 0.63 ± 0.05 | 3.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, H.; Kong, D.; Shan, J.; Xu, F. Study the Parametric Effect of Pulling Pattern on Cherry Tomato Harvesting Using RSM-BBD Techniques. Agriculture 2021, 11, 815. https://doi.org/10.3390/agriculture11090815
Xie H, Kong D, Shan J, Xu F. Study the Parametric Effect of Pulling Pattern on Cherry Tomato Harvesting Using RSM-BBD Techniques. Agriculture. 2021; 11(9):815. https://doi.org/10.3390/agriculture11090815
Chicago/Turabian StyleXie, Huaibei, Deyi Kong, Jianhua Shan, and Feng Xu. 2021. "Study the Parametric Effect of Pulling Pattern on Cherry Tomato Harvesting Using RSM-BBD Techniques" Agriculture 11, no. 9: 815. https://doi.org/10.3390/agriculture11090815
APA StyleXie, H., Kong, D., Shan, J., & Xu, F. (2021). Study the Parametric Effect of Pulling Pattern on Cherry Tomato Harvesting Using RSM-BBD Techniques. Agriculture, 11(9), 815. https://doi.org/10.3390/agriculture11090815