
Travel Reduction Control of Distributed Drive Electric Agricultural Vehicles Based on Multi-Information Fusion


Abstract
:1. Introduction
2. Materials and Methods
2.1. Drive Control Based on SMC
2.2. Drive Control Based on Incremental PI Control
3. Results and Discussion
3.1. Uniform Surface
3.1.1. Test of Non-Controlled Strategy
3.1.2. Test of SMC
3.1.3. Test of Incremental PI Control
3.2. Separated Pavement Test
3.2.1. Test of Non-Controlled Strategy
3.2.2. Test of SMC
3.2.3. Test of Incremental PI Control
3.3. Discussions
4. Conclusions
- (1)
- According to the difference between the state variables and the target travel reduction, the strategy can effectively distribute the energy and hence driving force of each wheel, so that the travel reduction of the vehicle can be stabilized around the target travel reduction.
- (2)
- Compared with the non-control strategy, the two strategies can effectively reduce the impact of road changes on vehicle velocity.
- (3)
- On a uniform surface, the travel reduction of each wheel can be maintained at the target value by using the incremental PI control strategy, with a less settling time.
- (4)
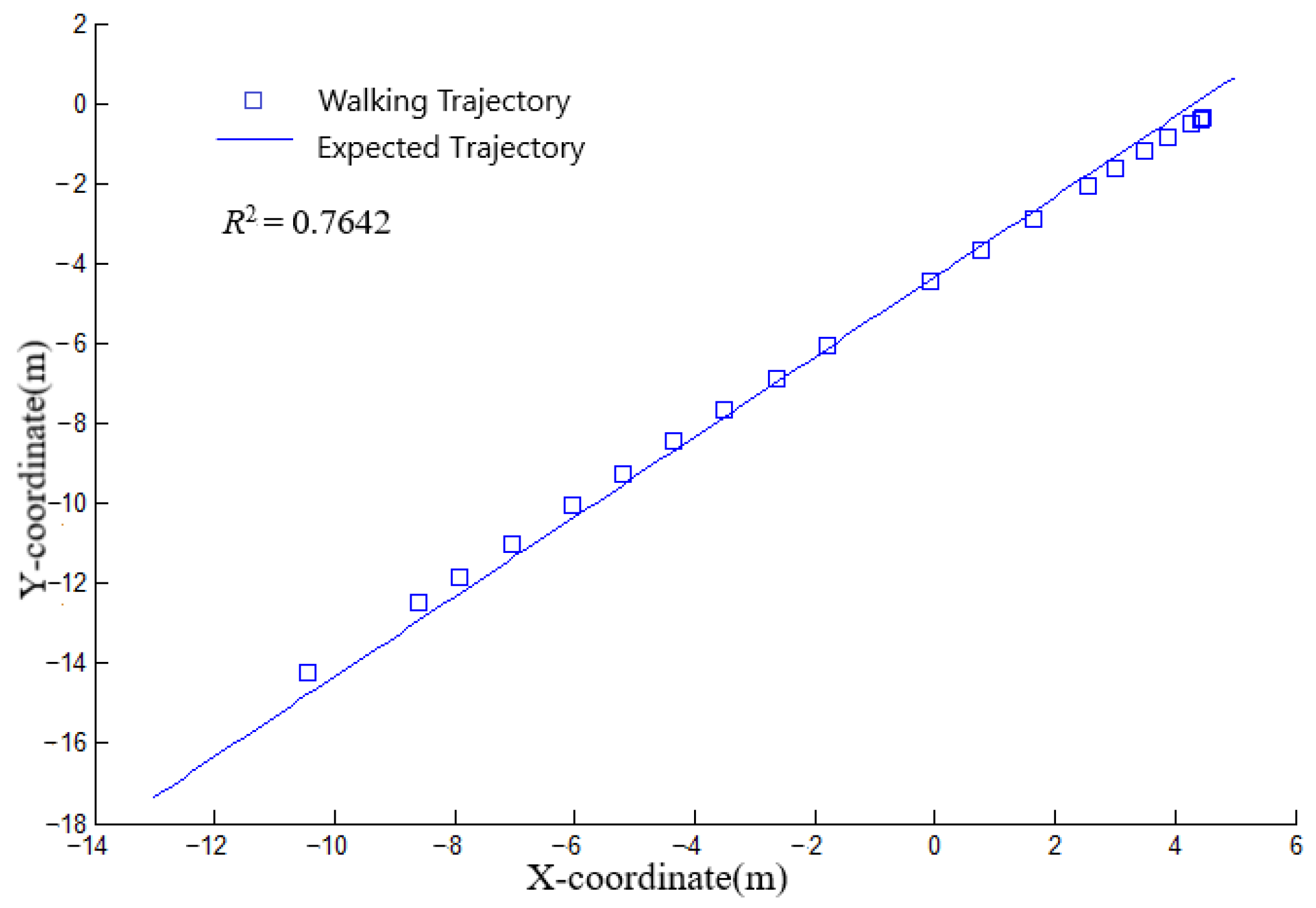
- On a separated surface, the travel reduction of each wheel can be maintained at the target value by using the SMC strategy, with less oscillation. The goodness of fit between walking and expected trajectory was 0.9902, which meant its driving trajectory was closer to the desired straight line.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, C.B.; Yu, Y.C.; Wu, Y.P. Design of high trafficability four wheel self-propelled field machine for tobacco. Trans. Chin. Soc. Agric. Eng. 2011, 27, 37–41. (In Chinese) [Google Scholar] [CrossRef]
- Zhang, J.; Chen, D.; Wang, S.M.; Hu, X.A.; Wang, D. Design and experiment of four-wheel independent steering driving and control system for agricultural wheeled robot. Trans. Chin. Soc. Agric. Eng. 2015, 31, 63–70. (In Chinese) [Google Scholar] [CrossRef]
- Zhang, T.M.; Huang, H.; Huang, P.H. Design and test of drive and control system for electric wheeled mobile car. Trans. Chin. Soc. Agric. Eng. 2014, 30, 11–18. (In Chinese) [Google Scholar] [CrossRef]
- Wang, Y.; Fujimoto, H.; Hara, S. Driving force distribution and control for EV with four in-wheel motors: A case study of acceleration on split-friction surfaces. IEEE Trans. Ind. Electron. 2017, 64, 3380–3388. [Google Scholar] [CrossRef]
- Lenzo, B.; Bucchi, F.; Sorniotti, A. On the handling performance of a vehicle with different front-to-rear wheel torque distributions. Veh. Syst. Dyn. 2019, 57, 1685–1704. [Google Scholar] [CrossRef]
- Cao, Q.M.; Zhou, Z.L.; Zhang, M.Z.; Xi, Z. Algorithm and verification for estimating tractor driving wheel slip rate. Trans. Chin. Soc. Agric. Eng. 2015, 31, 35–41. (In Chinese) [Google Scholar] [CrossRef]
- Osinenko, P.V.; Geissler, M.; Herlitzius, T. A method of optimal traction control for farm tractors with feedback of drive torque. Biosyst. Eng. 2015, 129, 20–33. [Google Scholar] [CrossRef]
- Li, H.L.; Luo, Y. T Integrated coordination control for distributed drive electric vehicle trajectory tracking. Int. J. Automot. Technol. 2020, 21, 1047–1060. [Google Scholar] [CrossRef]
- Beal, C.E.; Gerdes, J.C. Model predictive control for vehicle stabilization at the limits of handling. IEEE Trans. Control. Syst. Technol. 2013, 21, 1258–1269. [Google Scholar] [CrossRef]
- Choi, M.; Choi, S.B. Model predictive control for vehicle yaw stability with practical concerns. IEEE Trans. Veh. Technol. 2014, 63, 3539–3548. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, C.N. Electronic Stability Control for Improving Stability for an Eight In-Wheel Motor-Independent Drive Electric Vehicle. Shock. Vib. 2019, 2019, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Zhai, L.; Sun, T.; Wang, J. Electronic stability control based on motor driving and braking torque distribution for a four in-wheel motor drive electric vehicle. IEEE Trans. Veh. Technol. 2016, 65, 4726–4739. [Google Scholar] [CrossRef]
- Sun, Z.; Xie, H.; Zheng, J.C. Path-following control of Mecanum-wheels omnidirectional mobile robots using nonsingular terminal sliding mode. Mech. Syst. Signal. Process. 2021, 147, 107128. [Google Scholar] [CrossRef]
- Sun, Z.; Zheng, J.; Man, Z.; Wang, H. Robust control of a vehicle steer-by-wire system using adaptive sliding mode. IEEE Trans. Ind. Electron. 2016, 63, 2251–2262. [Google Scholar] [CrossRef]
- Chen, S.Y.; Gong, S.S. Speed tracking control of pneumatic motor servo systems using observation-based adaptive dynamic sliding-mode control, Mech. Syst. Signal Process. 2017, 94, 111–128. [Google Scholar] [CrossRef]
- Li, S.; Wu, C.; Sun, Z. Design and implementation of clutch control for automotive transmissions using terminal-sliding-mode control and uncertainty observer, IEEE Trans. Veh. Technol. 2016, 65, 1890–1898. [Google Scholar] [CrossRef]
- Feng, Y.; Zheng, J.; Yu, X.; Truong, N.V. Hybrid terminal sliding-mode observer design method for a permanent-magnet synchronous motor control system. IEEE Trans. Ind. Electron. 2009, 56, 3424–3431. [Google Scholar] [CrossRef]
- Zhou, X.S.; Zhou, J. The tracking control study of distributed electric-driven agricultural vehicles based on real-time online estimation. Adv. Mech. Eng. 2019, 11, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.S.; Zhou, J. Data-Driven Driving State Control for Unmanned Agricultural Logistics Vehicle. IEEE Access 2020, 8, 65530–65543. [Google Scholar] [CrossRef]
- Zhong, W.J.; Gao, Q.; Lu, Z.X. Road conditions tractor driving wheel slip ratio of test and analysis. J. Huazhong Agric. Univ. 2015, 34, 130–136. (In Chinese) [Google Scholar]
- Zhao, L.J.; Deng, N.N.; Ge, Z.H. Real-time road condition estimation for four-wheel-drive vehicle. J. Harbin Inst. Technol. 2014, 46, 42–46. [Google Scholar]
- Chu, W.B. State Estimation and Coordinated Control for Distributed Electric Vehicles. Ph.D. Thesis, Tsinghua University, Beijing, China, December 2013. [Google Scholar]
- Zhang, X.J.; Gao, X.H.; Wang, Y.C. Unified dynamical model of vehicle steering and model-following control. Trans. Chin. Soc. Agric. Eng. 2009, 25, 173–177. (In Chinese) [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Power | 18 KW |
| Vehicle size | 3.2 m × 2.0 m × 2.7 m |
| Trackwidth | 1.6–2.8 m |
| Wheelbase | 2.2 m |
| Vehicle mass | 2000 kg |
| Max mass | 3000 kg |
| Tire | 8.3–24 |
| Centroid coordinate | (1.12, 0, 1.763) m |
| Group | Wheel | Mean | Variance | ||||
|---|---|---|---|---|---|---|---|
| Non-Controlled | SMC | Incremental PI | Non-Controlled | SMC | Incremental PI | ||
| 1 | FL | −0.1324 | 0.0577 | 0.0136 | 0.0988 | 0.0212 | 0.0054 |
| RL | −0.0975 | 0.0554 | 0.0229 | 0.0987 | 0.0242 | 0.0032 | |
| FR | 0.0053 | 0.0458 | 0.0351 | 0.0275 | 0.0205 | 0.0025 | |
| RR | −0.0164 | 0.1299 | 0.0385 | 0.0302 | 0.011 | 0.0036 | |
| 2 | FL | −0.015 | 0.048 | 0.004 | 0.0524 | 0.0248 | 0.0147 |
| RL | 0.0268 | 0.0555 | 0.0304 | 0.0541 | 0.021 | 0.0126 | |
| FR | 0.053 | 0.0768 | 0.0107 | 0.0703 | 0.0139 | 0.0168 | |
| RR | 0.0478 | 0.0679 | 0.0341 | 0.0401 | 0.0189 | 0.0108 | |
| 3 | FL | −0.0402 | 0.0836 | 0.0578 | 0.0468 | 0.0113 | 0.0002 |
| RL | −0.0481 | 0.0487 | 0.0521 | 0.0622 | 0.0246 | 0.0002 | |
| FR | 0.0281 | 0.0975 | 0.0589 | 0.0556 | 0.0167 | 0.0002 | |
| RR | 0.021 | 0.0801 | 0.066 | 0.053 | 0.0109 | 0.0004 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, C.; Sun, P.; Zhou, J.; Mao, J. Travel Reduction Control of Distributed Drive Electric Agricultural Vehicles Based on Multi-Information Fusion. Agriculture 2022, 12, 70. https://doi.org/10.3390/agriculture12010070
Sun C, Sun P, Zhou J, Mao J. Travel Reduction Control of Distributed Drive Electric Agricultural Vehicles Based on Multi-Information Fusion. Agriculture. 2022; 12(1):70. https://doi.org/10.3390/agriculture12010070
Chicago/Turabian StyleSun, Chenyang, Pengfei Sun, Jun Zhou, and Jiawen Mao. 2022. "Travel Reduction Control of Distributed Drive Electric Agricultural Vehicles Based on Multi-Information Fusion" Agriculture 12, no. 1: 70. https://doi.org/10.3390/agriculture12010070