
Optimization Design and Simulation Experiment of a Press Roller Based on a Lemniscate-Shaped Curve in Rice–Wheat Rotation Region of China

Abstract
:1. Introduction
2. Materials and Methods
2.1. Machine Structure and Working Principles
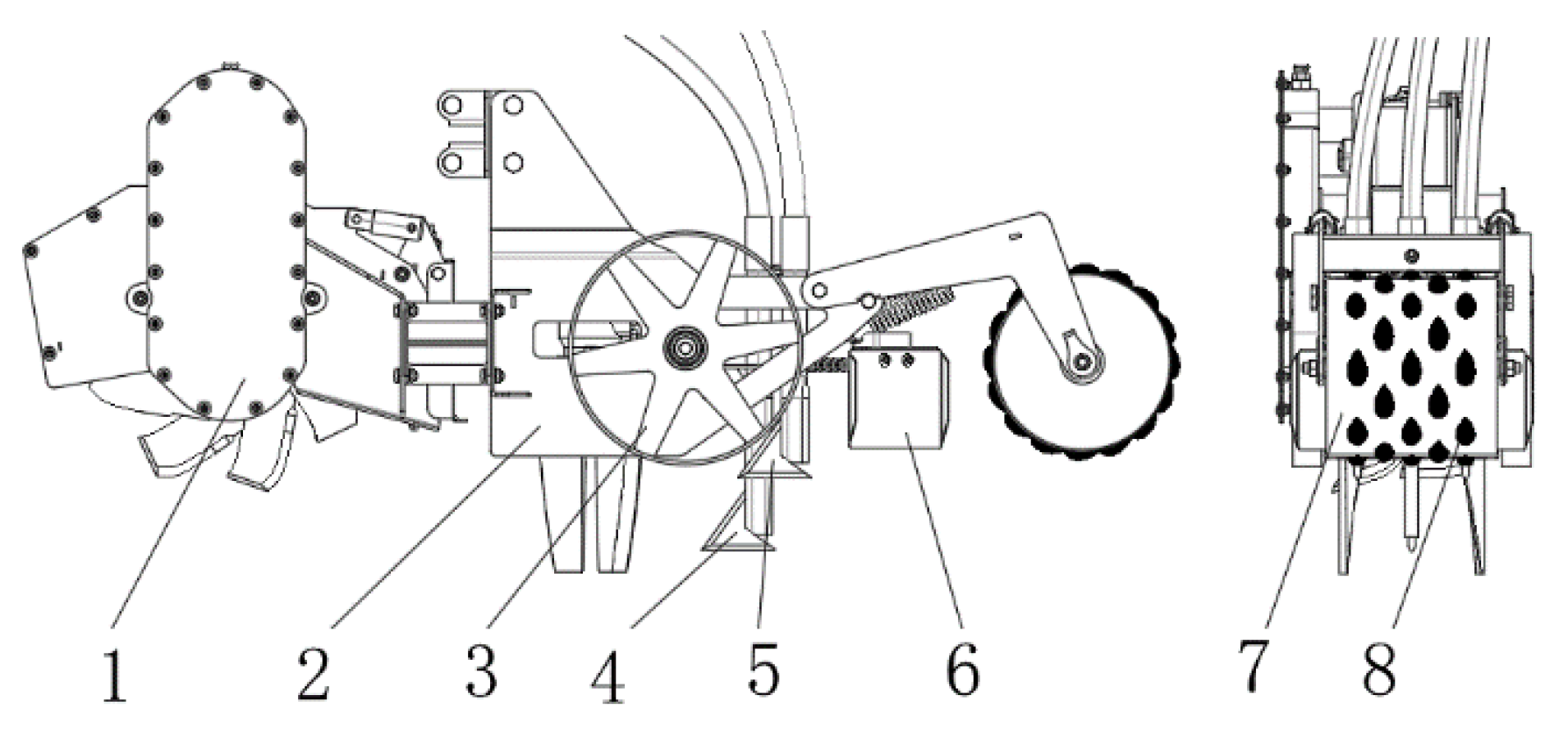
2.1.1. Machine Structure with a Non-Smooth Press Roller
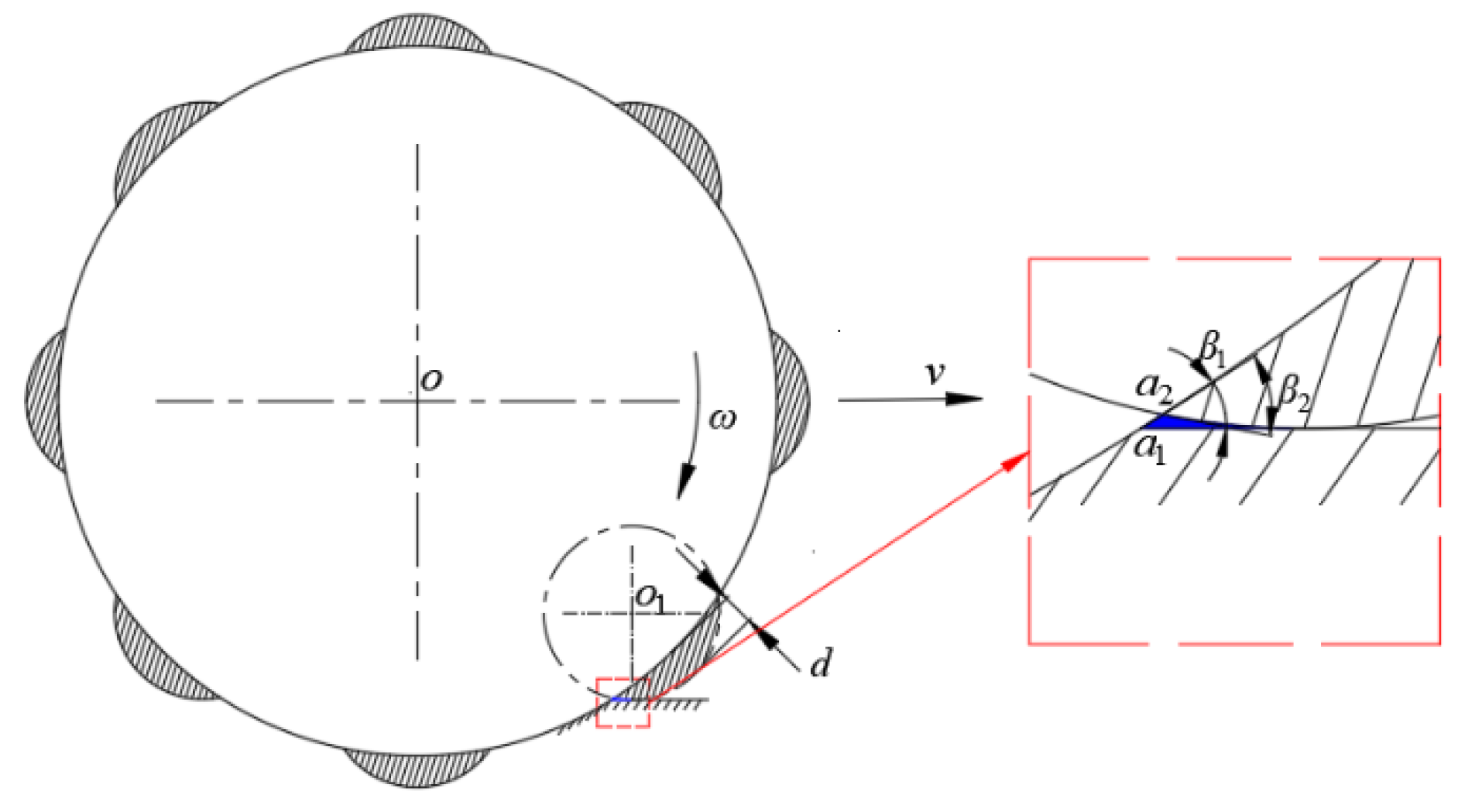
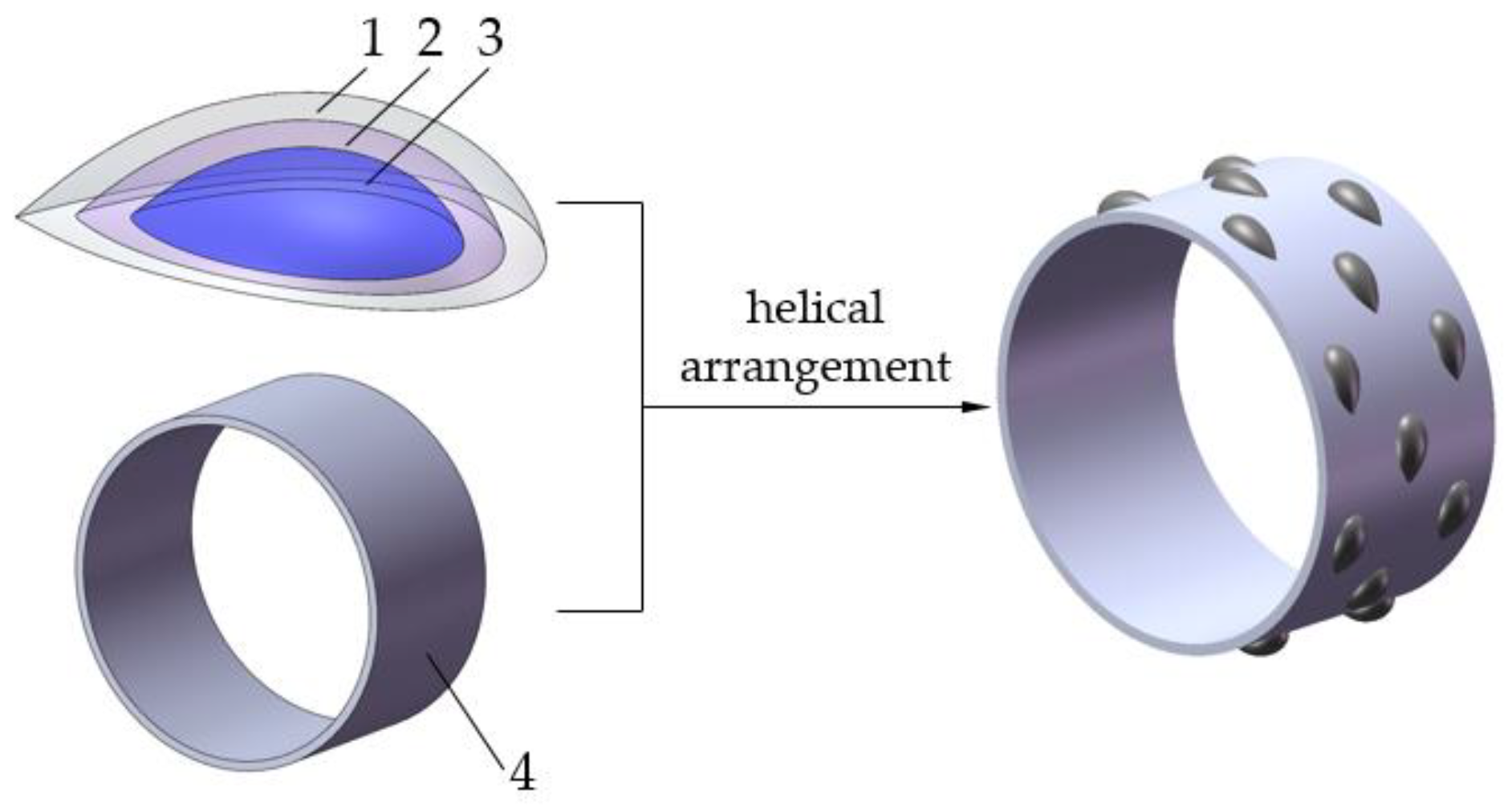
2.1.2. Design of the Low-Adhesion and Low-Resistance Structure of the Press Roller
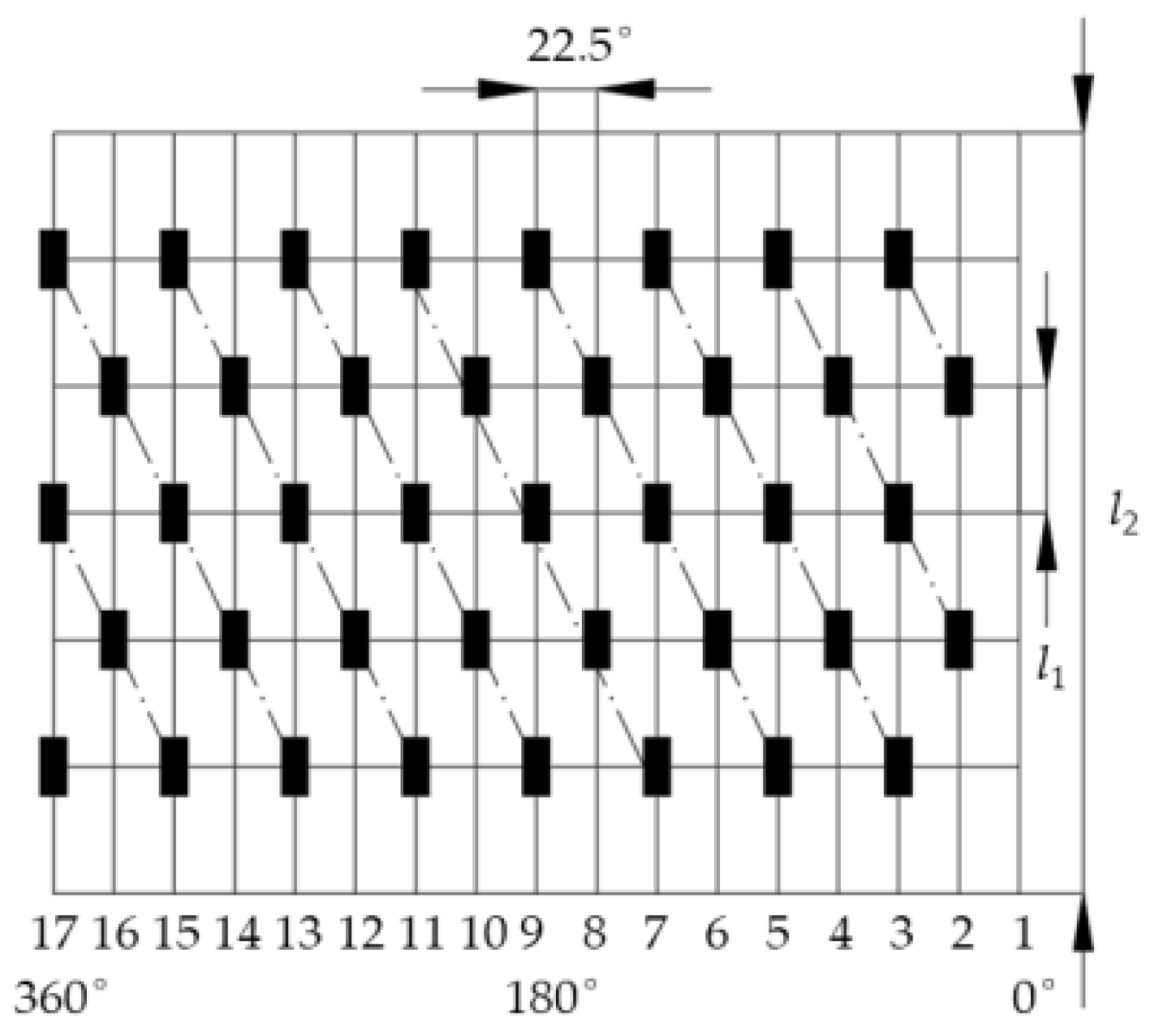
2.1.3. Arrangement of the Convex Geometrical Structure on the Press Roller
2.2. Virtual Interaction Simulation Model Building
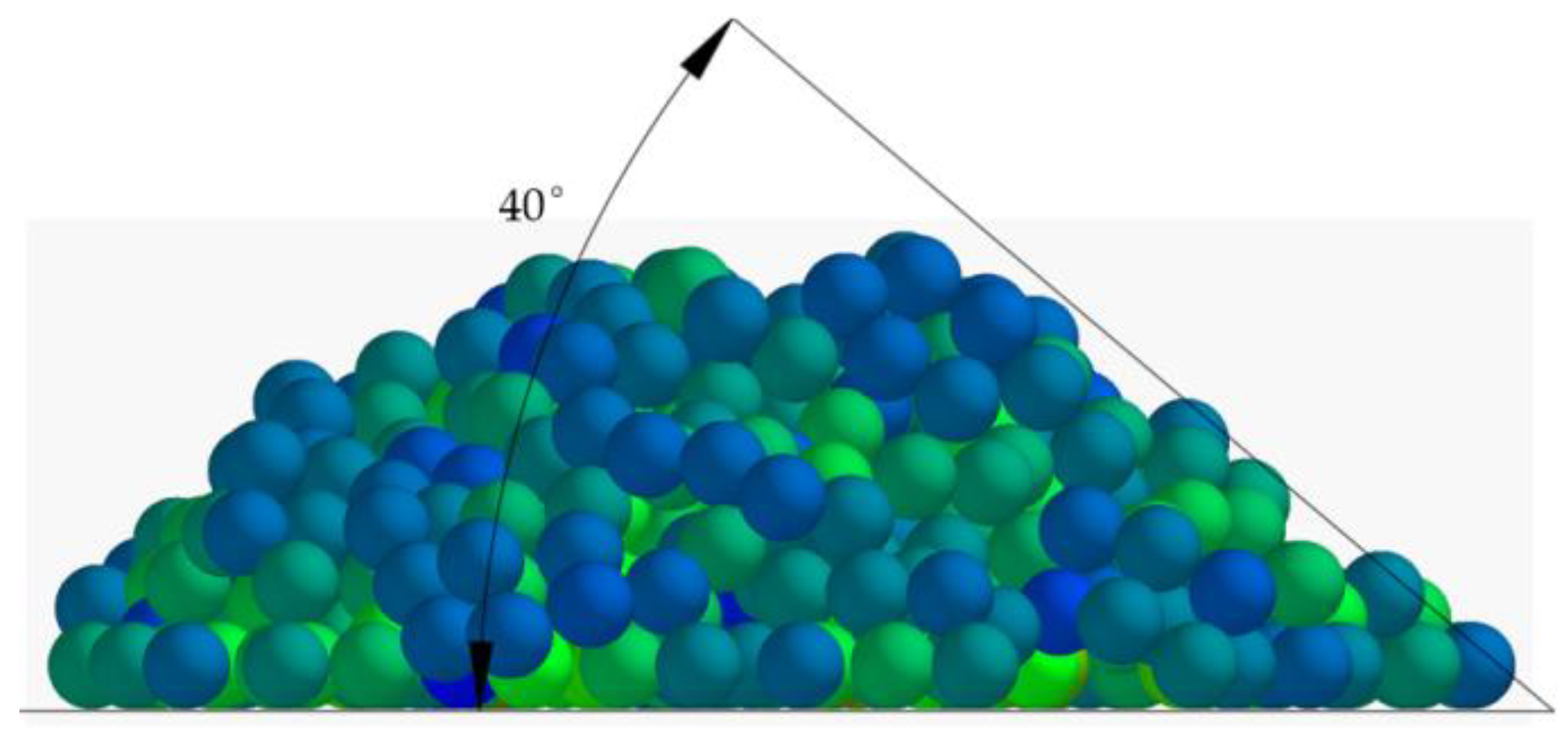
2.2.1. Selection of a Contact Model and Calibration of Model Parameters
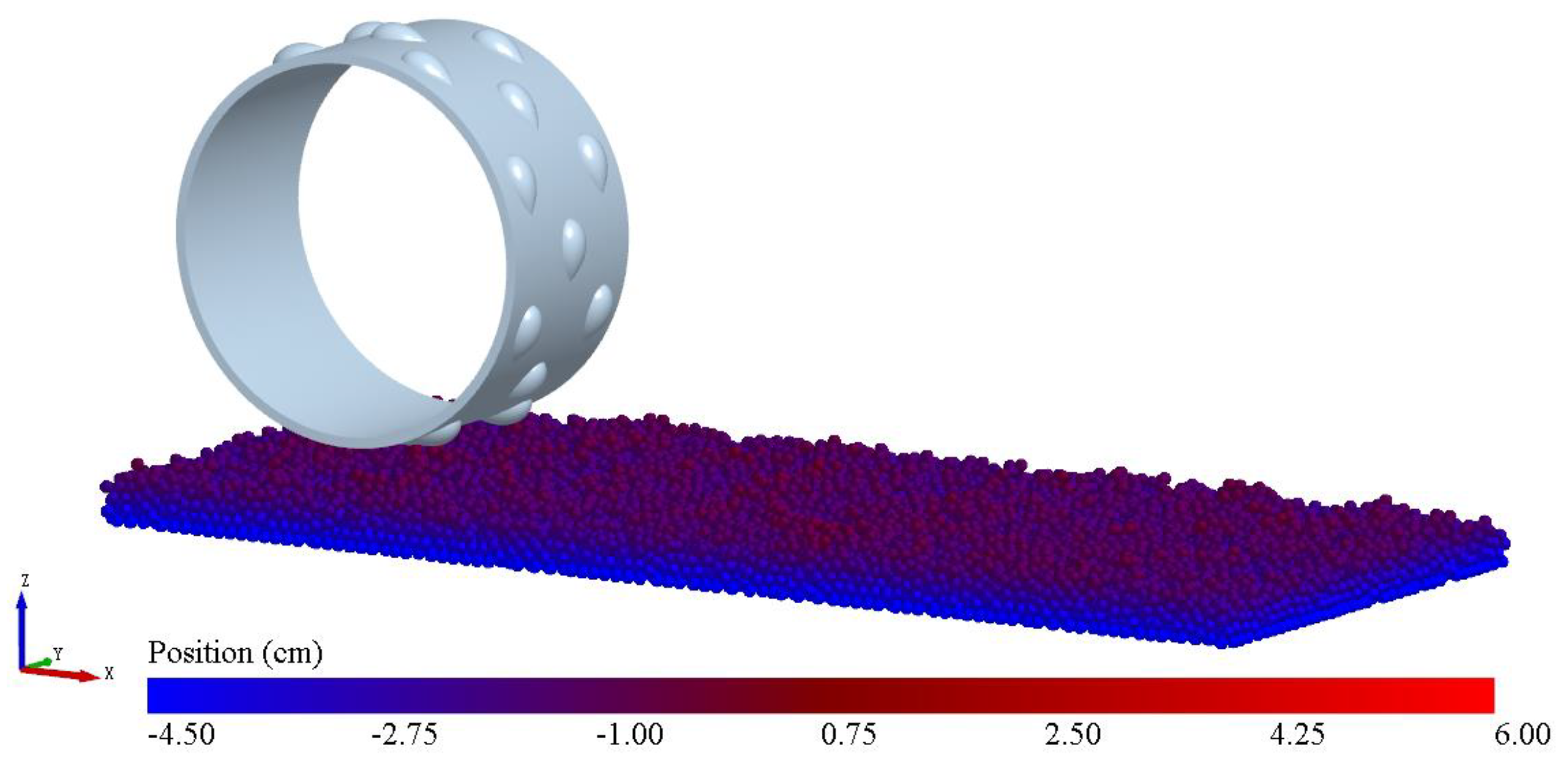
2.2.2. Virtual Soil–Roller Interaction Simulation Model
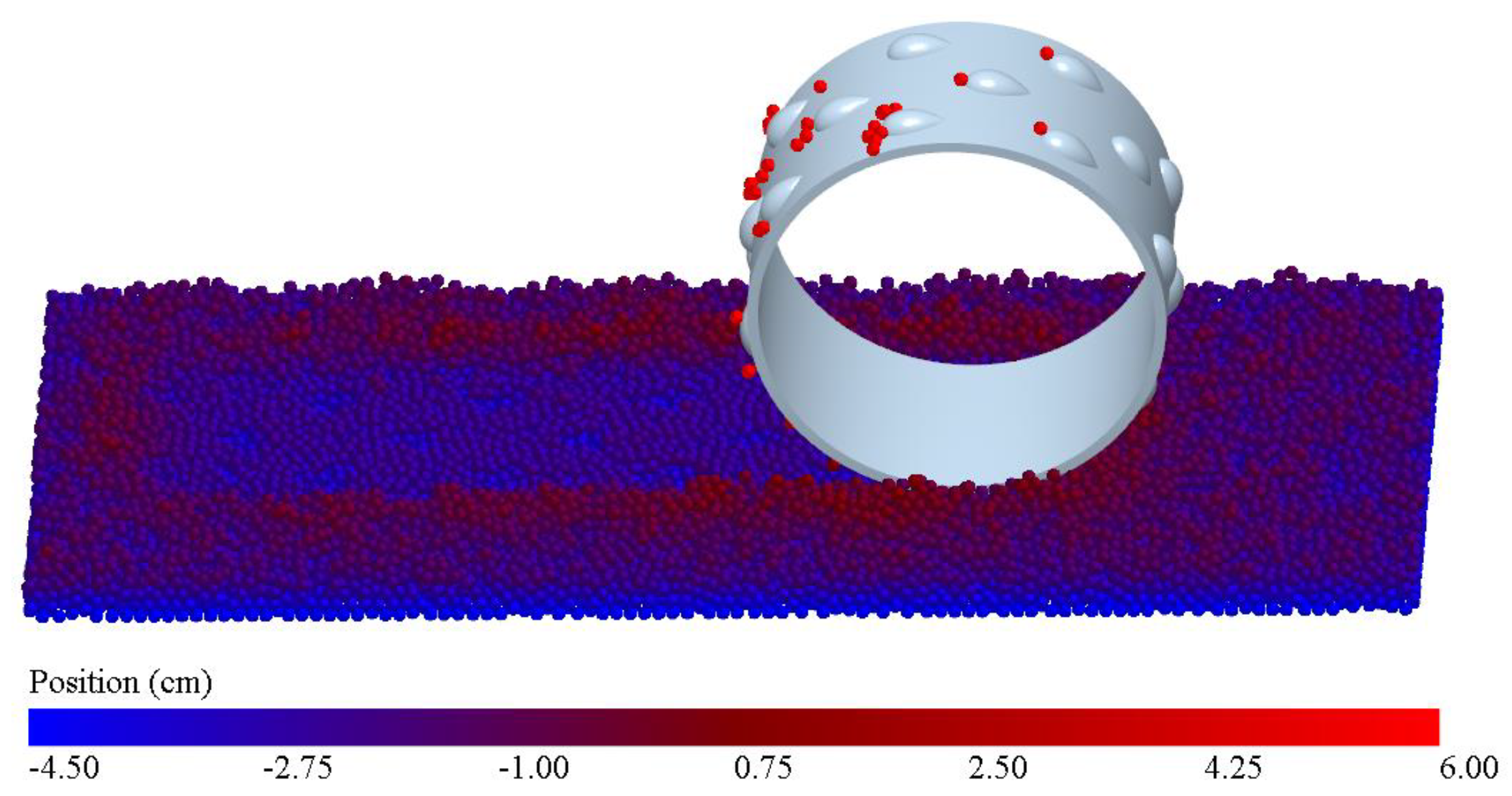
2.2.3. Setting Boundary Conditions
2.2.4. Analysis and Validation of the Simulation Results
2.3. Test Design and Treatment
3. Results and Analysis
3.1. Significance Test
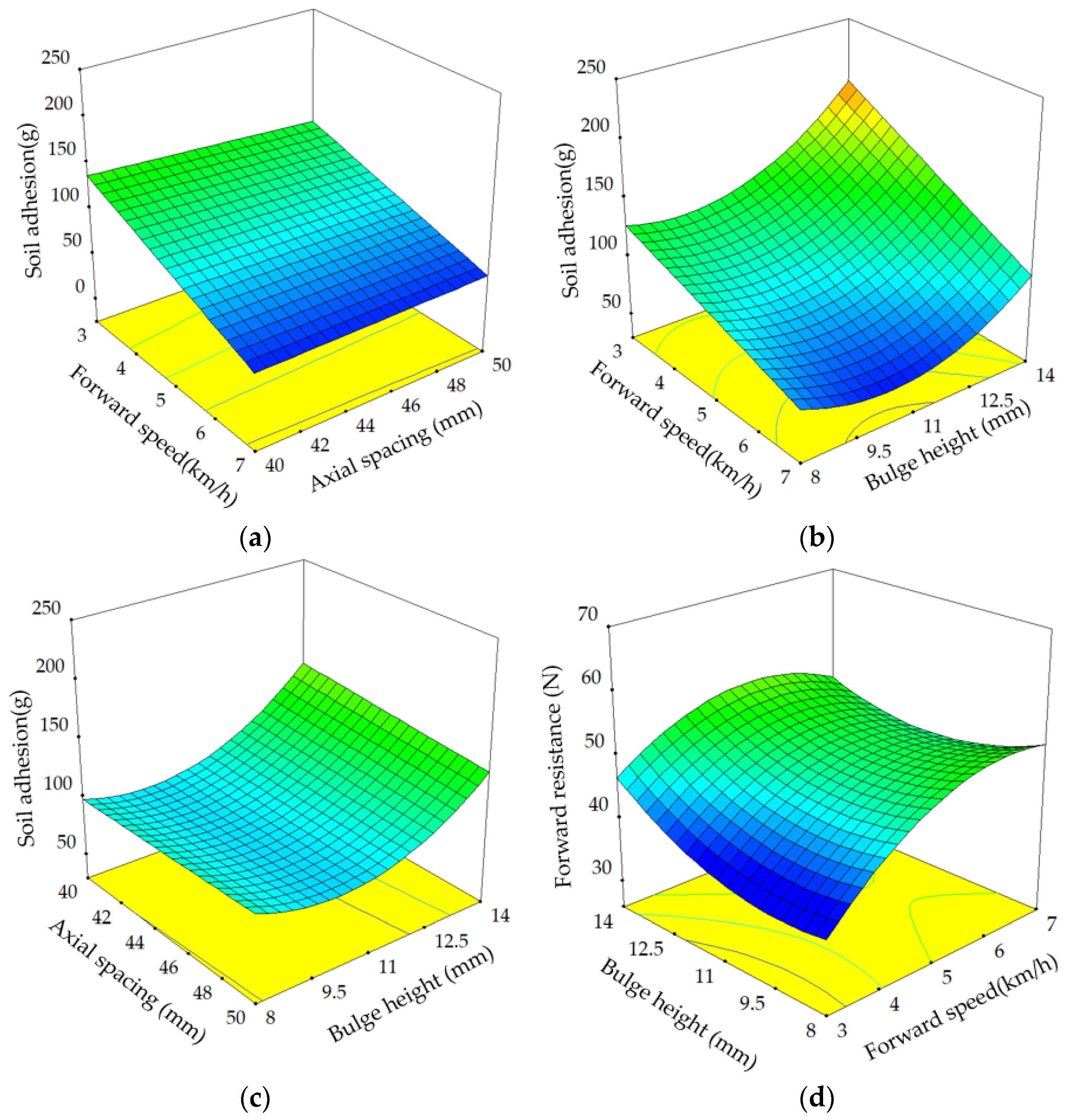
3.2. Analysis of the Response Surface
3.3. Parameter Combination Optimization
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, C.; Li, H.; He, J.; Wang, Q.; Lu, C.; Wang, J. Design and experiment of pneumatic wheat precision seed casting device in rice-wheat rotation areas. Trans. Chin. Soc. Eng. 2020, 51, 43–53. [Google Scholar]
- Qin, K.; Ding, W.; Fang, Z.; Du, T.; Zhao, S.; Wang, Z. Design and experiment of seeding system for harvest ditch and stalk disposing machine. Trans. Chin. Soc. Eng. 2017, 48, 54–62. [Google Scholar]
- Wang, C.; Li, H.; He, J.; Wang, Q.; Lu, C.; Yang, H. Optimization design of a pneumatic wheat-shooting device based on numerical simulation and field test in rice–wheat rotation areas. Agriculture 2022, 12, 56. [Google Scholar] [CrossRef]
- Lu, B.; Ni, X.; Li, S.; Li, K.; Qi, Q. Simulation and experimental study of a split high-speed precision seeding system. Agriculture 2022, 12, 1037. [Google Scholar] [CrossRef]
- Shi, Y.; Yu, H.; Jiang, Y.; Wang, X.; Chen, H.; Liu, H. Optimization of strip fertilization planter for straw throwing and paving. Agriculture 2022, 12, 613. [Google Scholar] [CrossRef]
- Han, L.; Yuan, W.; Yu, J.; Jin, J.; Xie, D.; Xi, X.; Zhang, Y.; Zhang, R. Simulation and experiment of spiral soil separation mechanism of compound planter based on discrete element method (DEM). Agriculture 2022, 12, 511. [Google Scholar] [CrossRef]
- Tong, J.; Zhang, Q.; Guo, L.; Chang, Y.; Guo, Y.; Zhu, F.; Chen, D.; Liu, X. Compaction performance of biomimetic press roller to soil. Biosys. Eng. 2015, 12, 152–159. [Google Scholar] [CrossRef]
- Aikins, K.A.; Jensen, T.A.; Antille, D.L.; Barr, J.B.; Ucgul, M.; Desbiolles, J.M.A. Evaluation of bentleg and straight narrow point openers in cohesive soil. Soil Tillage Res. 2021, 211, 105004. [Google Scholar] [CrossRef]
- Guo, H. Research and Experiment of Elastic Press Device for Inter-Row Till-Planter. Ph.D. Thesis, Jilin University, Changchun, China, 2014. [Google Scholar]
- Zhao, J. Research of Key Technology of No-Tillage Seeder for Stubble Retain with ALTERNATING Tillage. Ph.D. Thesis, Jilin University, Changchun, China, 2015. [Google Scholar]
- Wang, W. Bionic Press Device with Profiling Mechanism for Soybean Precision Planter. Ph.D. Thesis, Jilin University, Changchun, China, 2016. [Google Scholar]
- Chen, H.; Xu, Y.; Shi, N. Design and experiment on three-way adjustable V-type soil-covering and soil-compacting device. J. Northeast. Agric. Univ. 2018, 49, 65–73. [Google Scholar]
- Chang, Y. Bionic Soil Press Roller with Convex Geometrical Structure. Master’s Thesis, Jilin University, Changchun, China, 2014. [Google Scholar]
- Tong, J.; Zhang, Q.; Chang, Y.; Chen, D.; Dong, W.; Zhang, L. Reduction of soil adhesion and traction resistance of ridged bionic press rollers. Trans. Chin. Soc. Eng. 2014, 45, 135–140. [Google Scholar]
- Zhang, Z. Interaction of Soil and Rolling Soil Engaging Components for Micro-Topographical Preparation and Their Bionic Geometrical Structures. Ph.D. Thesis, Jilin University, Changchun, China, 2014. [Google Scholar]
- Wang, W. Research on Key Technologies of Constructing High-Quality Maize Seedbed and Its Inter-Row Till-Planter. Ph.D. Thesis, Jilin University, Changchun, China, 2019. [Google Scholar]
- Gong, H.; Chen, Y.; Wu, S.; Tang, Z.; Liu, C.; Wang, Z.; Fu, D.; Zhou, Y.; Qi, L. Simulation of canola seedling emergence dynamics under different soil compaction levels using the discrete element method (DEM). Soil Tillage Res. 2022, 223, 1037. [Google Scholar] [CrossRef]
- Jiang, M.; Dai, Y.; Cui, L.; Xi, B. Experimental and DEM analyses on wheel-soil interaction. J. Terramech. 2018, 76, 15–28. [Google Scholar] [CrossRef]
- Acquah, K.; Chen, Y. Discrete element modelling of soil compaction of a press-wheel. AgriEngineering 2021, 3, 278–293. [Google Scholar] [CrossRef]
- Khot, L.R.; Salokhe, V.M.; Jayasuriya, H.P.W.; Nakashima, H. Experimental validation of distinct element simulation for dynamic wheel-soil interaction. J. Terramech. 2007, 44, 429–437. [Google Scholar] [CrossRef]
- Czapla, T.; Pawlak, M. Simulation of the wheel-surface interaction dynamics for all-terrain vehicles. Appl. Mech. 2022, 3, 360–374. [Google Scholar] [CrossRef]
- Fu, J.; Zhang, Y.; Chen, Z.; Ren, L.; Cheng, C. Bionic design and experiment of threshing tooth based on structure of cattle apex tongue filiform papillae. Trans. Chin. Soc. Eng. 2019, 50, 167–176. [Google Scholar]
- Makange, N.R.; Ji, C.; Torotwa, I. Prediction of cutting forces and soil behavior with discrete element simulation. Comput. Electron. Agric. 2020, 179, 105848. [Google Scholar] [CrossRef]
- Meirion-Griffith, G.; Spenko, M. A Modified pressure-sinkage model for small, rigid wheels on deformable. Terrains. J. Terramech. 2011, 48, 149–155. [Google Scholar] [CrossRef]
- McKyes, E. Soil Cutting and Tillage. Dev. Agric. Eng. 1989, 10, 194–229. [Google Scholar]
- Ren, L. Soil Adhesion Mechanics; China Machine Press: Beijing, China, 2011. [Google Scholar]
- Vidal, M.; Bastos, D.; Silva, L.; Gaspar, D.; Paulo, I.; Matos, S.; Vieira, S.; Bordado, J.M.; Galhano dos Santos, R. Up-cycling tomato pomace by thermochemical liquefaction—A response surface methodology assessment. Biomass Bioenergy 2022, 156, 106324. [Google Scholar] [CrossRef]
- Mangili, I.; Lasagni, M.; Huang, K.; Isayev, A.I. Modeling and optimization of ultrasonic devulcanization using the response surface methodology based on central composite face-centered design. Chemom. Intell. Lab. Syst. 2015, 144, 1–10. [Google Scholar] [CrossRef]
- Cucinotta, F.; Scappaticci, L.; Sfravara, F.; Morelli, F.; Mariani, F.; Varani, M.; Mattetti, M. On the morphology of the abrasive wear on ploughshares by means of 3D scanning. Biosyst. Eng. 2019, 179, 117–125. [Google Scholar] [CrossRef]
- Wei, M.; Zhu, L.; Luo, F.; Zhang, J.-W.; Dong, X.-W.; Jen, T.-C. Share-soil interaction load and wear at various tillage conditions of a horizontally reversible plough. Comput. Electron. Agric. 2019, 162, 21–30. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Soil | Steel | |
|---|---|---|---|
| Poisson ratio | 0.3 | 0.25 | |
| Shear modulus (MPa) | 1 | 7.9 × 104 | |
| Density (kg/m3) | 2600 | 7820 | |
| Contact mechanical parameters | Static friction coefficient | Soil-Soil | 0.3 |
| Soil-Steel | 0.3 | ||
| dynamic friction coefficient | Soil-Soil | 0.1 | |
| Soil-Steel | 0.1 | ||
| restitution coefficient | Soil-Soil | 0.17 | |
| Soil-Steel | 0.15 | ||
| surface energy (J/m2) | Soil-Soil | 7 | |
| Soil-Steel | 3.2 | ||
| Levels | Factors | ||
|---|---|---|---|
| Forward Speed x1 (km/h) | Axial Spacing (mm) | Bulge Height x3 (mm) | |
| 1 | 7 | 50 | 14 |
| 0 | 5 | 45 | 11 |
| −1 | 3 | 40 | 8 |
| No. | Factors | Indexes | |||
|---|---|---|---|---|---|
| x1 | x2 | x3 | Y1/g | Y2/N | |
| 1 | 5 | 45 | 11 | 91 | 48.3 |
| 2 | 5 | 45 | 11 | 97 | 47.7 |
| 3 | 5 | 45 | 11 | 96 | 45.6 |
| 4 | 5 | 45 | 14 | 147 | 56.7 |
| 5 | 5 | 45 | 8 | 106 | 51.3 |
| 6 | 5 | 50 | 11 | 98 | 54.7 |
| 7 | 5 | 40 | 11 | 95 | 56.3 |
| 8 | 7 | 45 | 11 | 54 | 47.8 |
| 9 | 3 | 45 | 11 | 127 | 40.7 |
| 10 | 7 | 50 | 14 | 102 | 58.7 |
| 11 | 3 | 50 | 14 | 180 | 54.3 |
| 12 | 7 | 40 | 14 | 107 | 55.7 |
| 13 | 3 | 40 | 14 | 213 | 48.7 |
| 14 | 7 | 50 | 8 | 74 | 65.3 |
| 15 | 3 | 50 | 8 | 125 | 45.3 |
| 16 | 7 | 40 | 8 | 69 | 50.7 |
| 17 | 3 | 40 | 8 | 129 | 38.6 |
| Source | Sum of Squares | DF | Mean Square | F Value | p Value | Significant |
|---|---|---|---|---|---|---|
| Model | 24,787.6 | 9 | 2754.2 | 114.6 | <0.0001 | *** |
| x1 | 13,542.4 | 1 | 13,542.4 | 563.5 | <0.0001 | *** |
| x2 | 115.6 | 1 | 115.6 | 4.81 | 0.0644 | * |
| x3 | 6051.6 | 1 | 6051.6 | 251.8 | <0.0001 | *** |
| x1x2 | 171.1 | 1 | 171.1 | 7.12 | 0.0321 | ** |
| x1x3 | 666.1 | 1 | 666.1 | 27.7 | 0.0012 | *** |
| x2x3 | 190.1 | 1 | 190.1 | 7.9 | 0.026 | ** |
| x12 | 40.8 | 1 | 40.5 | 1.7 | 0.2354 | |
| x22 | 11.9 | 1 | 11.9 | 0.5 | 0.5034 | |
| x32 | 2762.9 | 1 | 2762.9 | 114.9 | <0.0001 | *** |
| Residual | 168.2 | 7 | 24.03 | |||
| Lack of Fit | 147.6 | 5 | 29.5 | 2.9 | 0.2794 | |
| Pure Error | 20.7 | 2 | 10.3 | |||
| Total | 24,955.9 | 16 |
| Source | Sum of Squares | DF | Mean Square | F Value | p Value | Significant |
|---|---|---|---|---|---|---|
| Model | 652.07 | 9 | 72.45 | 6.82 | 0.0096 | ** |
| x1 | 256.04 | 1 | 256.04 | 24.11 | 0.0017 | *** |
| x2 | 80.09 | 1 | 80.09 | 7.54 | 0.0287 | ** |
| x3 | 52.44 | 1 | 52.44 | 4.94 | 0.0617 | * |
| x1x2 | 3.51 | 1 | 3.51 | 0.33 | 0.5833 | |
| x1x3 | 53.56 | 1 | 53.56 | 5.04 | 0.0596 | ** |
| x2x3 | 20.16 | 1 | 20.16 | 1.90 | 0.2107 | |
| x12 | 89.65 | 1 | 89.65 | 8.44 | 0.0228 | ** |
| x22 | 80.03 | 1 | 80.03 | 7.54 | 0.0287 | |
| x32 | 42.13 | 1 | 42.13 | 3.97 | 0.0866 | * |
| Residual | 74.33 | 7 | 10.62 | |||
| Lack of Fit | 70.31 | 5 | 14.06 | 7.00 | 0.1298 | |
| Pure Error | 4.02 | 2 | 2.01 | |||
| Total | 726.40 | 16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Zhang, W. Optimization Design and Simulation Experiment of a Press Roller Based on a Lemniscate-Shaped Curve in Rice–Wheat Rotation Region of China. Agriculture 2022, 12, 1599. https://doi.org/10.3390/agriculture12101599
Liu H, Zhang W. Optimization Design and Simulation Experiment of a Press Roller Based on a Lemniscate-Shaped Curve in Rice–Wheat Rotation Region of China. Agriculture. 2022; 12(10):1599. https://doi.org/10.3390/agriculture12101599
Chicago/Turabian StyleLiu, Hongjun, and Wenyi Zhang. 2022. "Optimization Design and Simulation Experiment of a Press Roller Based on a Lemniscate-Shaped Curve in Rice–Wheat Rotation Region of China" Agriculture 12, no. 10: 1599. https://doi.org/10.3390/agriculture12101599
APA StyleLiu, H., & Zhang, W. (2022). Optimization Design and Simulation Experiment of a Press Roller Based on a Lemniscate-Shaped Curve in Rice–Wheat Rotation Region of China. Agriculture, 12(10), 1599. https://doi.org/10.3390/agriculture12101599