
Design and Parameter Optimization of Fruit–Soil Separation Device of Lily Harvester



Abstract
:1. Introduction
2. Materials and Methods
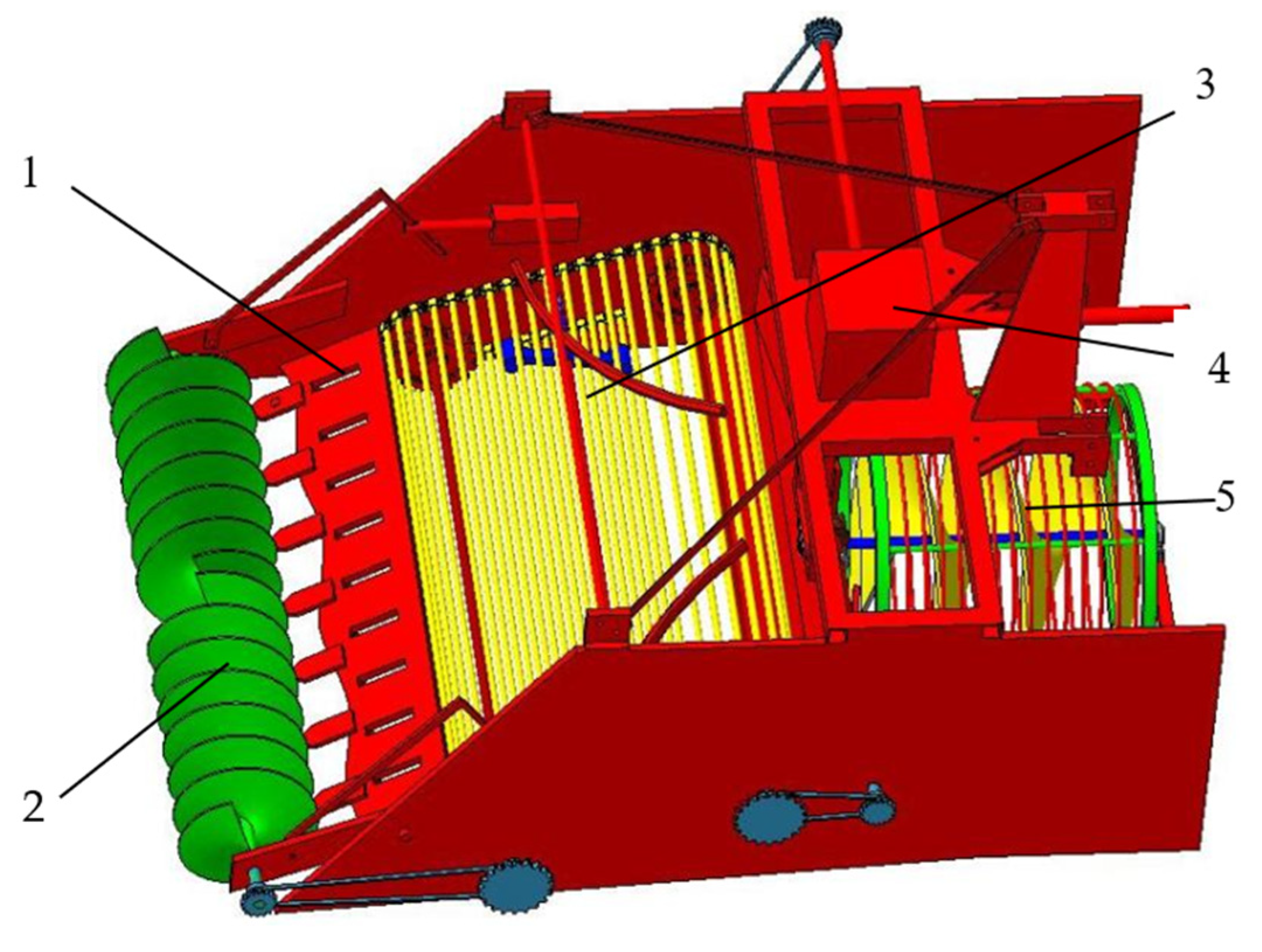
2.1. The Overall Structure and Working Principle
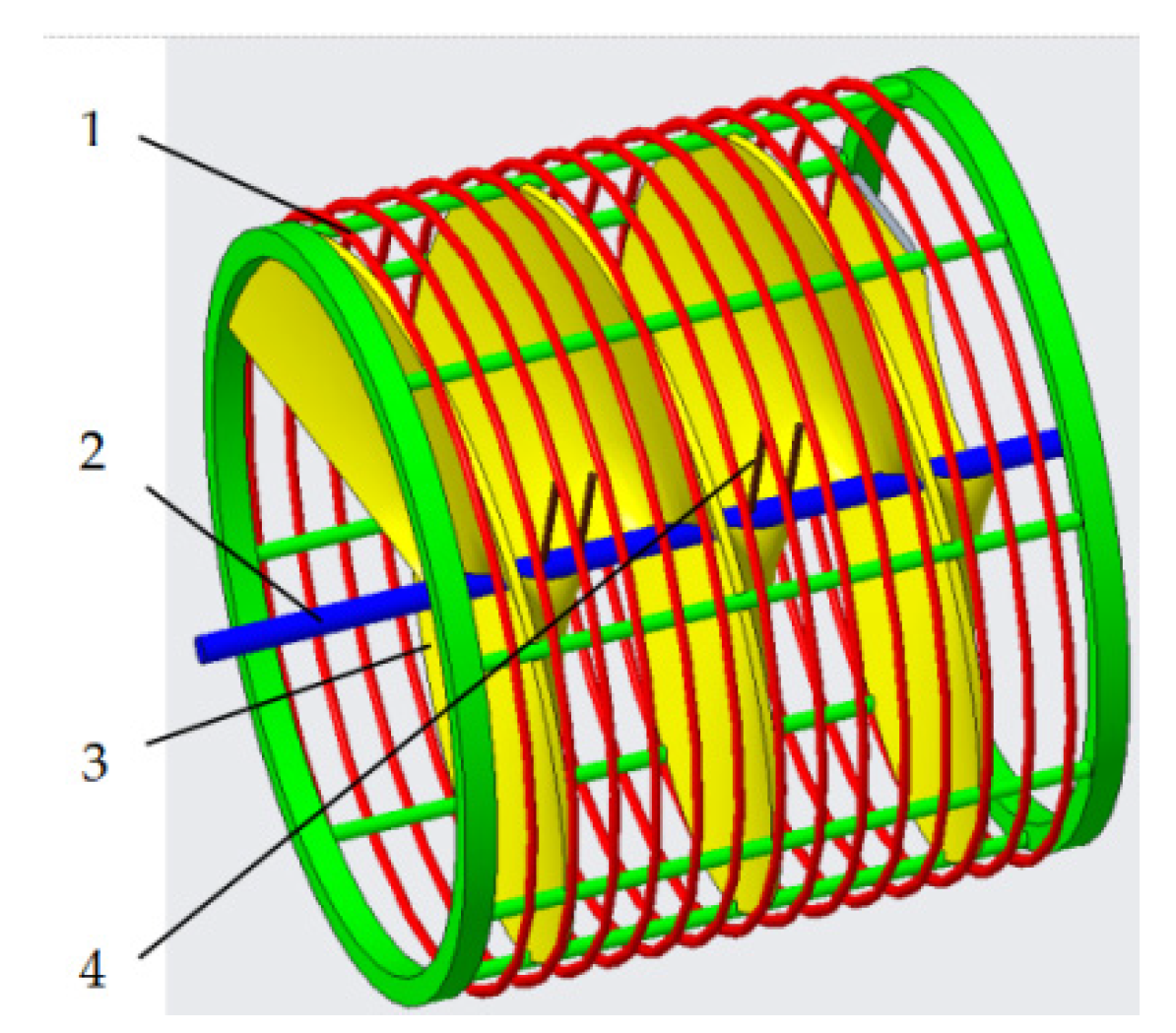
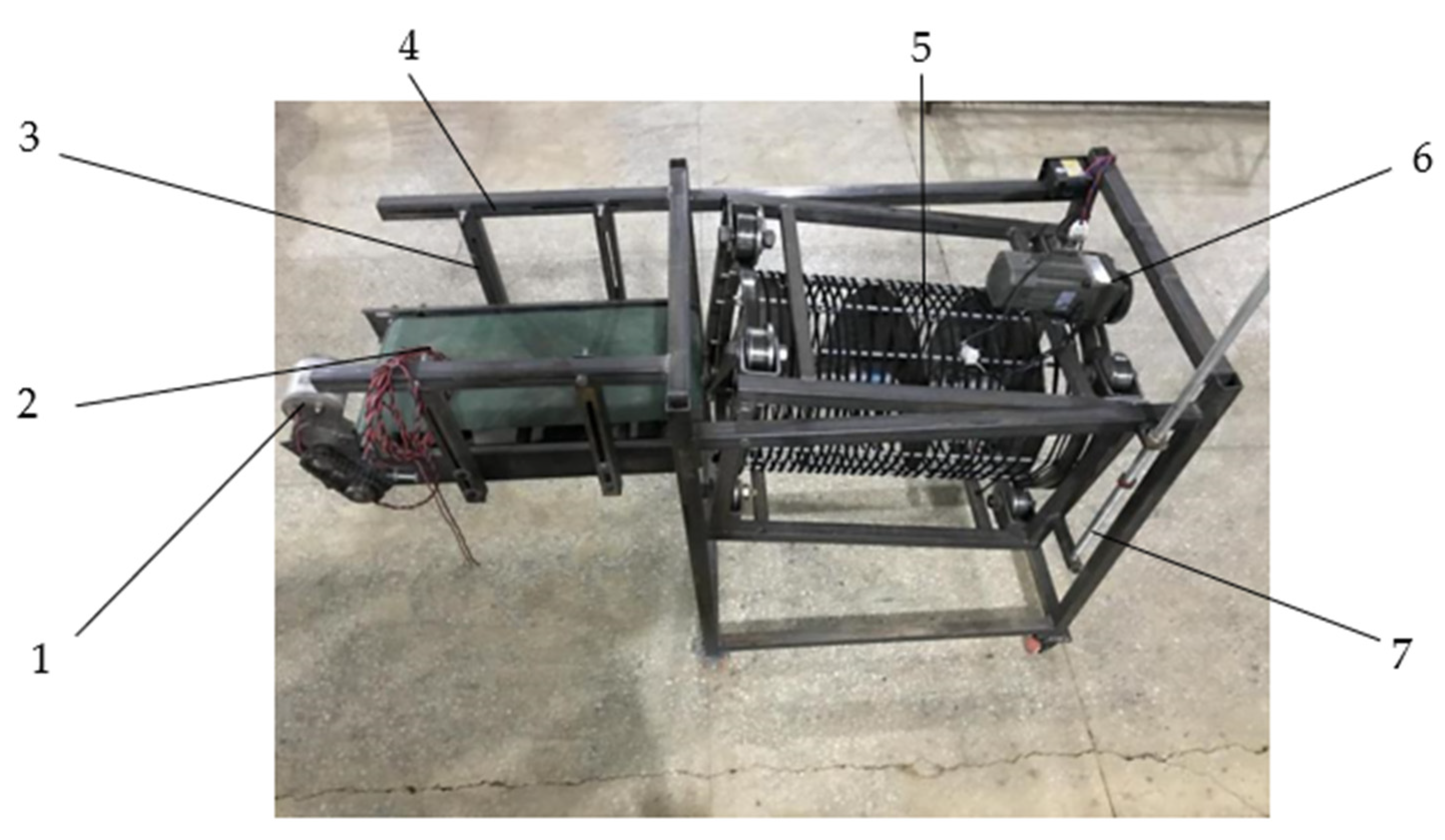
2.1.1. The Whole Structure and the Separation Mechanism Design of Fruit–Soil
2.1.2. Working Principle
2.1.3. Main Technical Parameters
2.2. Analysis of Feeding Amount and Movement Process of Lily Fruit–Soil Separator
2.2.1. Analysis of Fruit–Soil Mixture Feeding Amount on the Front Conveyor Belt
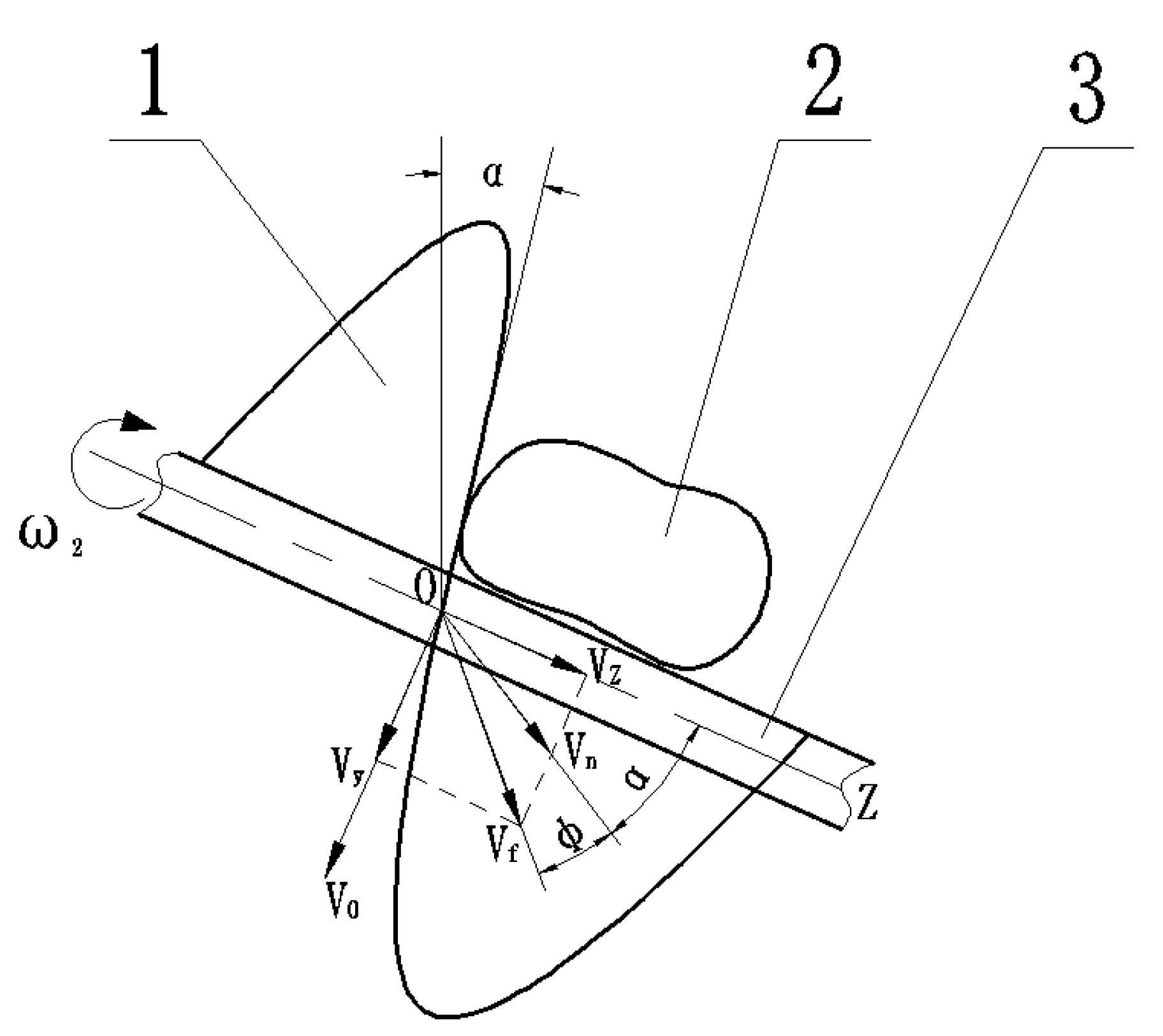
2.2.2. Axial Kinematics Analysis of Fruit–Soil Mixture
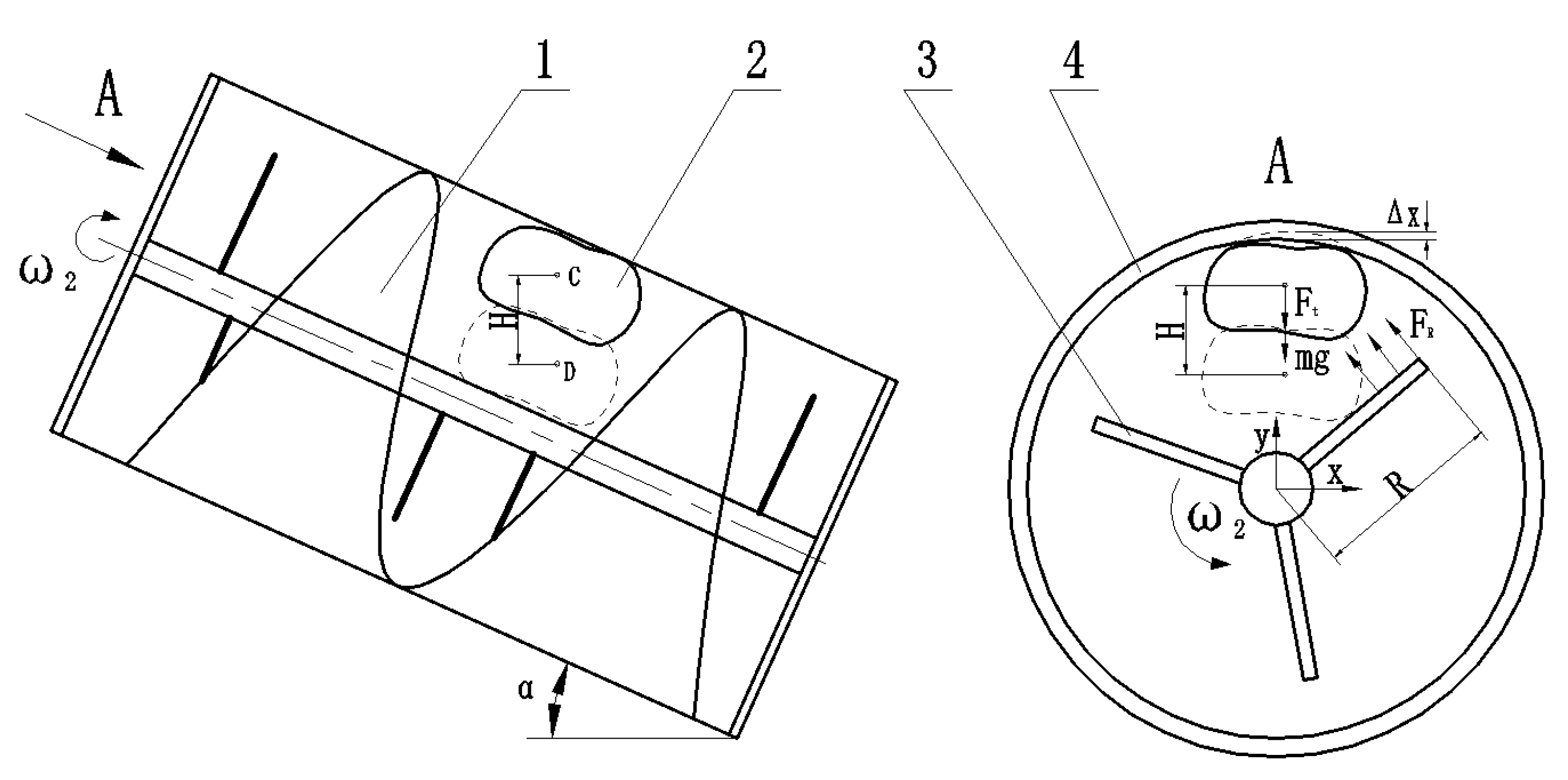
2.2.3. Dynamic Analysis of Radial Impact of Fruit–Soil Separation
3. Bench Test
3.1. Test Conditions and Test Equipment
3.2. The Assessment Index
- (1)
- Soil fragmentation rate
- (2)
- Lily damage rate
3.3. Test Scheme and Results
4. Results and Discussion
4.1. Experiment Scheme and Results
4.2. Analysis of Test Results
4.2.1. Establishment and Significance Analysis of SFR Regression Model of the Soil Fragmentation Rate
4.2.2. Establishment and Significance Analysis of LDR Regression Model of the Lily Injury Rate
4.2.3. Response Surface Analysis
4.3. Parameter Optimization and Verification Test
4.3.1. Parameter Optimization
4.3.2. Verification Test
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Campbell, A.; Birt, I.; MacKinnon, B. Modifications of a potato harvester for small plot field research. Am. Potato J. 1990, 67, 799–803. [Google Scholar]
- Kempenaar, C.; Struik, P. The canon of potato science: 33. Haulm killing. Potato Res. 2007, 50, 341–345. [Google Scholar] [CrossRef]
- Shmulevich, I. State of the art modeling of soil–tillage interaction using discrete element method. Soil Tillage Res. 2019, 111, 41–53. [Google Scholar] [CrossRef]
- Vallone, M.; Alleri, M.; Bono, F.; Catania, P. A New Wireless Device for Real-Time Mechanical Impact Evaluation in a Citrus Packing Line. Trans. ASABE 2020, 63, 1–9. [Google Scholar] [CrossRef]
- Zhou, K.; Leck Jensen, A.; Bochtis, D. Simulation model for the sequential in-field machinery operations in a potato production system. Comput. Electron. Agric. 2015, 6, 173–186. [Google Scholar] [CrossRef]
- Herold, B.; Geyer, M.; Studman, C.J. Fruit contact pressure distributions—Equipment. Comput. Electron. Agric. 2020, 32, 167–179. [Google Scholar] [CrossRef]
- Berardinelli, A.; Donati, V.; Giunchi, A. Damage to pears caused by simulated transport. J. Food Eng. 2015, 66, 219–226. [Google Scholar] [CrossRef]
- Afshari, H.; Saeid, M.; Morteza, A. Examination potato damage under impact loading. Iran. J. Foodence Technol. 2018, 5, 69–80. [Google Scholar]
- Rymuza, K.; Bombik, A.; Stopa, D. The Effect of Potato Ridge Height and Harvest Date on Tuber Injuries. J. Plant Prot. Res. 2014, 54, 225–230. [Google Scholar] [CrossRef]
- Jarimopas, B.; Singh, S.P.; Saengnil, W. Measurement and analysis of truck transport vibration levels and damage to packaged tangerines during transit. Packag. Technol. Sci. 2018, 18, 179–188. [Google Scholar] [CrossRef]
- Bentini, M.; Caprara, C.; Martelli, R. Harvesting Damage to Potato Tubers by Analysis of Impacts recorded with an Instrumented Sphere. Biosyst. Eng. 2016, 94, 75–85. [Google Scholar] [CrossRef]
- Lü, J.; Tian, Z.; Wu, J. Design and experiment on 4U1Z vibrating potato digger. Trans. Chin. Soc. Agric. Eng. Trans. CSAE 2019, 31, 39–47. [Google Scholar]
- Lü, J.; Tian, Z.; Yang, Y.; Shang, Q.; Wu, J. Design and experimental analysis of 4U2A type double-row potato digger. Trans. Chin. Soc. Agric. Eng. 2018, 31, 17–24. [Google Scholar]
- Rady, A.M.; Soliman, N. Evaluation of Mechanical Damage of Lady Rosetta Potato Tubers Using Different Methods. Int. J. Postharvest Technol. Innov. 2019, 5, 125. [Google Scholar] [CrossRef]
- Celik, H.K.; Rennie, A.; Akinci, I. Reverse engineering approach for precise measurement of the physical attributes related to the geometric features of agricultural products. J. Food Meas. Charact. 2016, 11, 117–129. [Google Scholar] [CrossRef] [Green Version]
- Wei, Z.; Li, H.; Su, G. Development of potato harvester with buffer type potato-impurity separation sieve. Trans. Chin. Soc. Agric. Eng. 2019, 35, 1–11. [Google Scholar]
- Wang, D.; Shang, S.; Han, K. Design and test of 4HJL-2 harvester for peanut picking-up and fruit-picking. Trans. Chin. Soc. Agric. Eng. 2018, 29, 27–36. [Google Scholar]
- Yang, R.; Yang, H.; Shang, S. Design and Test of Poking Roller Shoving Type Potato Harvester. Trans. Chin. Soc. Agric. Mach. 2016, 47, 119–126. [Google Scholar]
- Yang, R.; Yang, H.; Shang, S. Design and experiment of vertical circular separating and conveying device for potato combine harvester. Trans. Chin. Soc. Agric. Eng. 2018, 34, 10–18. [Google Scholar]
- Lü, J.; Sun, H.; Dui, H. Design and Experiment on Conveyor Separation Device of Potato Digger under Heavy Soil Condition. Trans. Chin. Soc. Agric. Mach. 2017, 48, 146–155. [Google Scholar]
- Zi, L.; Baokang, K.; Yi, J. Agricultural Mechanics, 2nd ed.; China Agricultural Press: Beijing, China, 1996; pp. 46–67. [Google Scholar]
- Böl, M.; Seydewitz, R.; Leichsenring, K.; Sewerin, F. A phenomenological model for the inelastic stress–strain response of a potato tuber. J. Mech. Phys. Solids 2020, 137, 103870. [Google Scholar] [CrossRef]
- Hon, W.; Di, W.; Wen, L.; Shi, Z.; Xiao, Y. Development of 4UFD-1400 type potato combine harvester. Trans. Chin. Soc. Agric. Eng. 2019, 29, 11–19. [Google Scholar]
- Shangpeng, D.; Bai, L.; Yao, Y.; Yue, B.; Fu, Z.; Zheng, Z.; Huang, Y. Discrete element modelling (DEM) of fertilizerdual-banding with adjustable rates. Comput. Electron. Agric. 2018, 152, 32–39. [Google Scholar]
- Wang, Y.; Zhang, Y.; Yang, Y. Discrete element modelling of citrus fruit stalks and its verification. Biosyst. Eng. 2020, 200, 400–414. [Google Scholar] [CrossRef]
- Ge, Y.; Liang, Q.; Wang, G. Experimental Design Method and Application of Design-Expert Software; Harbin Institute of Technology Press: Harbin, China, 2015; pp. 137–148. [Google Scholar]
- Li, Y.; Hu, C. Test Design and Data Processing; Chemical Industry Press: Beijing, China, 2017; pp. 188–193. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Machine Size (Length × Width × Height)/(mm×mm×mm) | 2350 × 1600 × 1300 |
| Engine Power/kW | 44.7–59.6 |
| Dimensions of Fruit–Soil Separation Unit/(mm × mm × mm) | 950 × 500 × 500 |
| Working Width/mm | 1600 |
| Digging Depth/mm | 150~300 (Adjustable) |
| Driving Speed/(Km·h−1) | 3–7 |
| Working Efficiency/(m2·h−1) | 2000–4000 |
| Levels | Experimental Factor | ||
|---|---|---|---|
| e | Front Conveyor Belt Line Speed ×1 (m/s) | Inclination Angle of Fruit–Soil Flexible Separation Unit ×2 (°) | Rotation Speed of Fruit–Soil Flexible Separation Unit ×3 (r/min) |
| +1 | 0.8 | 15 | 50 |
| 0 | 1.4 | 35 | 80 |
| −1 | 2.0 | 55 | 110 |
| Number. | Experimental Factor | Soil Fragmentation Rate SFR/% | Lily Injury Rate LDR/% | ||
|---|---|---|---|---|---|
| X1 (m/s) 1 | X2 (°) | X3 (r/min) | |||
| 1 | 0.0 | 0.0 | 0.0 | 90.6 | 7.8 |
| 2 | 0.0 | 0.0 | 0.0 | 91.3 | 7.9 |
| 3 | 0.0 | −1.0 | 1.0 | 96.5 | 9.7 |
| 4 | 0.0 | 1.0 | −1.0 | 83.0 | 5.2 |
| 5 | 1.0 | −1.0 | 0.0 | 85.4 | 8.1 |
| 6 | −1.0 | 0.0 | −1.0 | 81.5 | 6.0 |
| 7 | 0.0 | 0.0 | 0.0 | 91.7 | 7.7 |
| 8 | −1.0 | 0.0 | 1.0 | 94.6 | 9.1 |
| 9 | −1.0 | −1.0 | 0.0 | 87.6 | 8.0 |
| 10 | 1.0 | 0.0 | −1.0 | 81.20 | 6.2 |
| 11 | 0.0 | −1.0 | −1.0 | 82.9 | 6.5 |
| 12 | 0.0 | 0.0 | 0.0 | 90.8 | 7.7 |
| 13 | 1.0 | 1.0 | 0.0 | 86.3 | 7.3 |
| 14 | 1.0 | 0.0 | 1.0 | 93.0 | 9.3 |
| 15 | 0.0 | 1.0 | 1.0 | 97.1 | 8.9 |
| 16 | −1.0 | 1.0 | 0.0 | 88.9 | 7.2 |
| 17 | 0.0 | 0.0 | 0.0 | 91.1 | 7.9 |
| Sources | Soil Fragmentation Rate (SFR) | Lily Injury Rate (LDR) | ||||||
|---|---|---|---|---|---|---|---|---|
| Sum of Squares | Degrees of Freedom | F Value | p Value 2 | Sum of Squares | Degrees of Freedom | F Value | p Value | |
| Model | 400.67 | 9 | 105.13 | <0.0001 | 23.32 | 9 | 140.34 | <0.0001 |
| X1 | 3.67 | 1 | 8.67 | 0.0216 * | 0.0376 | 1 | 2.04 | 0.1964 |
| X2 | 0.7273 | 1 | 1.72 | 0.2314 | 1.75 | 1 | 94.65 | <0.0001 ** |
| X3 | 200.77 | 1 | 474.08 | <0.0001 ** | 12.86 | 1 | 696.86 | <0.0001 ** |
| X1X2 | 0.0506 | 1 | 0.1195 | 0.7397 | 0.002 | 1 | 0.1097 | 0.7502 |
| X2X3 | 0.4032 | 1 | 0.9522 | 0.3617 | 0.0012 | 1 | 0.0664 | 0.8041 |
| X1X3 | 0.0552 | 1 | 0.1304 | 0.7287 | 0.0552 | 1 | 2.99 | 0.1273 |
| X1 2 | 41.45 | 1 | 97.89 | <0.0001 ** | 0.0062 | 1 | 0.3337 | 0.5816 |
| X2 2 | 3.21 | 1 | 7.57 | 0.0284 * | 0.0406 | 1 | 2.2 | 0.1814 |
| X3 2 | 0.4946 | 1 | 1.17 | <0.0001 ** | 0.0805 | 1 | 4.36 | 0.0752 |
| Residual | 2.96 | 7 | 0.1292 | 7 | ||||
| Lack of Fit | 2.19 | 3 | 3.8 | 0.1149 | 0.0727 | 3 | 1.72 | 0.3011 |
| Pure Error | 0.7699 | 4 | 0.0565 | 4 | ||||
| Total | 403.63 | 16 | 23.44 | 16 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, Z.; Wu, M.; Fang, Z.; Qu, Y. Design and Parameter Optimization of Fruit–Soil Separation Device of Lily Harvester. Agriculture 2022, 12, 175. https://doi.org/10.3390/agriculture12020175
Dai Z, Wu M, Fang Z, Qu Y. Design and Parameter Optimization of Fruit–Soil Separation Device of Lily Harvester. Agriculture. 2022; 12(2):175. https://doi.org/10.3390/agriculture12020175
Chicago/Turabian StyleDai, Zhenwei, Mingliang Wu, Zhichao Fang, and Yongbo Qu. 2022. "Design and Parameter Optimization of Fruit–Soil Separation Device of Lily Harvester" Agriculture 12, no. 2: 175. https://doi.org/10.3390/agriculture12020175