1. Introduction
Labor shortage and low mechanization have become huge challenges for tea harvest in China [
1,
2,
3], it is urgent to develop efficient and reliable mechanized tea picking technology. Commonly used tea picking machines [
4] harvest tea shoots with the cutter composed of double reciprocating multi-teeth blades like combine-harvesters, but the machine usually results in poor quality of harvested tea shoots due to broken leaves and bad cut surface on the stem. Therefore, it is necessary to analyze interaction between the tea stalk and the cutter for understanding what determines the working performance of the machine. During the harvesting process, the tea stalk is first bended and then clamped and cut off by the teeth of the blades. The process could be separated into two phases: (1) bending and (2) clamping and cutting. Essentially, the bending shape of the stalk and the cut position on the stalk are vital factors that together determine whether the harvested tea shoot can satisfy the processing needs. Hence, it is significant to study the bending behavior of tea stalks to design or optimize the cutter and determine operational parameters such as cutting height, forward speed, and cutting frequency for the machine.
Many studies have been conducted to study relationships between the bending properties and physical properties of plant stalks. Xue and Cao [
5] studied the influences of internode position and tea variety on the elastic modulus and breaking deflection of tea stalks. Du et al. [
6] analyzed the grey correlations and established regression models between physical properties, including stem segment number, stem diameter, moisture content, cellulose content, lignin content and so on, and the elastic modulus of tea stalks. İnce et al. [
7] analyzed the bending properties of sunflower stalk residue under four moisture contents at the lower, middle, and upper regions, respectively. They found that the elastic modulus of the stalk residue decreased with an increase in moisture and stalk diameter, whose effects decreased at lower moisture contents. Ahmad et al. [
8] and Tavakoli et al. [
9] found that the elastic modulus of wheat stalks decreased from the first internode to the third internode down from the ear, and the elastic modulus was negatively correlated with the moisture content. Moreover, similar results were also reported for alfalfa stalk [
10], safflower stalk [
11,
12], rice stalk [
13], and barley stalk [
14].
In most studies, plant stalks are cut into multiple segments at first; then, the moment of inertia of the stalk’s segment is calculated by regarding its cross section as a solid or hollow circle [
15] or ellipse [
16,
17]; next, either three-point bending test or cantilever bending test are performed on the stalk’s segment by universal test machine, texture analyzer, or self-established experimental system; finally, the average value of elastic modulus of the stalk’s segment is calculated by approximate equations of the deflection curves of simply supported beam or cantilever beam subjected to a concentrated load. However, it is difficult to make plant stalks, such as tea stalks, rice stalks and wheat stalks, into ideal test specimens with a standard geometric size, because the cross section is irregular and varied along the axial line of plant stalks. Moreover, the approximate equations, referring to the book edited by Gere and Timoshenko [
18], can only be used when the deflection curves of plant stalks have very small rotation angles, very small deflections, and very small curvatures, which means the rotation angle (in radians) is approximately equal to the slope for the deflection curve. Therefore, big errors may occur if separately calculating the moment of inertia and elastic modulus of plant stalks.
Inoue et al. [
19] derived the differential equation of deflection curve of crop stalks based on cantilever beam with constant flexural rigidity, subject to concentrated load and large deflection, and a method was proposed to get the nodes’ coordinates by line-shift camera and image processing. On this basis, Hirai et al. [
20] proposed a method for calculating the flexural rigidity of crop stalks by the mechanical model based on the actual structure of crop stalks, with no need for cutting crop stalks into small segments. However, multiple markers must be bonded to a crop stalk for obtaining the coordinates of actual nodes, and the flexural rigidities of all internodes were solved by the trial-and-error method one by one. Moreover, calculation for flexural rigidity of an internode only considers the deflection at the corresponding node; therefore, the calculated flexural rigidity could not accurately represent the average flexural rigidity of the whole internode, and the longer the internode is, the greater the error would be. The mechanical model based on the actual structure of crop stalks [
20] was further applied to analyze the dynamic responses of the reaction force and bending posture of rice stalk and wheat stalk [
21,
22,
23,
24].
The bending behavior of plant stalks is the combined effects of external load and self-load caused by the weight of the stalk itself, but the self-weight of plant stalks is often neglected. Fukushima and Sato [
25] established a mechanical model for cabbage hypocotyl to clarify the deformation due to weight of the part above the cotyledonary node. The hypocotyl was regarded as a prismatic beam with constant flexural rigidity, and the results indicate that the flexural rigidity of the hypocotyl increases exponentially proportional to the number of days elapsed during the seedling stage. Stubbs et al. [
26] investigated the effect of plant weight on estimations of stalk lodging resistance, and they found that a significant error would occur when ignoring the effect of self-load on wheat and rice stalks, which have relatively larger ears, whereas no significant errors occurred for large and stiff plants such as maize, bamboo, and sorghum. However, plant stalks were simplified as a prismatic beam with constant flexural rigidity, and approximate equations of deflection curves of beams under the condition of small deflection were used in the study.
Few literatures have been published on the bending behavior of tea stalks. There has been no suitable and convenient method to obtain the deflection curve of plant stalks until now. Plant stalks are usually simplified as either a prismatic beam with constant flexural rigidity or a non-prismatic beam, in which each actual internode was regarded as a prismatic beam with constant flexural rigidity. Although the latter could better characterize the bending behavior of plant stalks in mechanics than the former, it is also limited by the actual internodes of plant stalks. In fact, flexural rigidity varies along the axial line of plant stalks even in the same internode, because of different maturity levels, varied cross-sectional shapes, and the complicated biological tissues of plant stalks.
In this study, we focused on investigating the bending behavior of individual tea stalk to provide a fundamental basis for the optimization design of the cutter and adaptive adjustment techniques of the operational parameters for tea picking machines. A novel method was proposed to obtain the deflection curve of tea stalk based on the binocular vision technique and non-uniform rational B-spline (NURBS) curve fitting technique. Moreover, a mechanical model was developed for tea stalk, and the concepts of virtual node and virtual internode were introduced in the model. With the model, two methods were developed to solve the piecewise flexural rigidities of virtual internodes and predict the deflection curve of tea stalk under given loads, respectively.
3. Results and Discussion
Lengths of tea stalks selected for the experiment ranges from 170 to 290 mm with 5 to 9 internodes. Following sections presented some results of fitted NURBS curves of tea stalks and illustrated how to solve flexural rigidity of the stalk and predict deflection curve under given load conditions based on the developed model with virtual internodes.
3.1. Fitted Non-Uniform Rational B-Spline Curves for Bending Shapes of Tea Stalks
In total, 120 point sets were obtained by the method described in
Section 2.2.1, including 6 point sets of each stalk with 1 for the initial shape and 5 for the bending shapes.
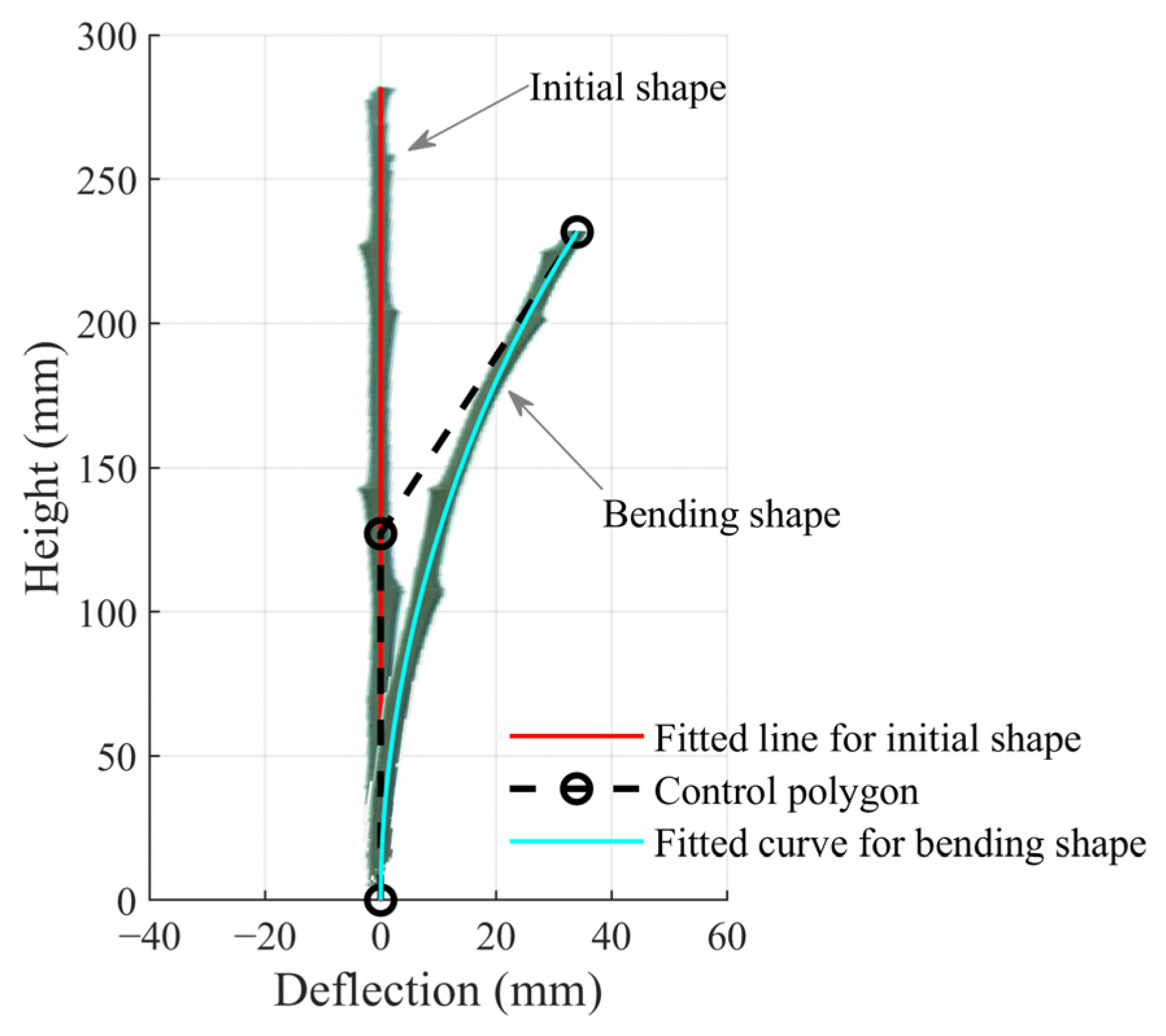
Figure 4 showed an example of a fitted line for the initial shape and a fitted NURBS curve for the bending shape of a tea stalk, respectively. Concretely, the fitted line for the initial shape is
, and the deflection curve for the bending shape was fitted into a 2nd-degree NURBS curve.
The points of tea stalks for the initial shape ranges from 3027 to 7063 with an average of 4894, and the values of coefficient of determination (
R-squared) of the fitted NURBS curves for the point sets
ranges 0.9769 from 0.9937 with an average of 0.9881. Besides, the points of tea stalks for bending shape ranges from 1746 to 5849 with an average of 3523, and
R-squared values of fitted NURBS curves ranged from 0.9576 to 0.9964 with an average of 0.9797. The frequency distributions of the number of points of stalks for bending shape and
R-squared values of fitted NURBS curves were shown in
Figure 5a and
5b, respectively.
Deflection curve reflects the bending characteristics of plant stalks. The existing studies usually provide methods to obtain positions of several discrete points such as the load point and stalk’s nodes, hence it limits the investigation on bending properties such as the flexural rigidity of plant stalks. To deeply study the bending characteristics of plant stalks, it is necessary to obtain the deflection curve of plant stalks. In the study, a novel method was proposed to get the deflection curve of tea stalks. The method includes two important steps: (1) obtain the point set describing the bending shape of tea stalk in the plane, and (2) perform 2nd-degree NURBS curve fitting to obtain the deflection curve of tea stalk. The 2nd-degree NURBS curve used in this study has some advantages: (1) three control points are directly related to geometric shape of deflection curve. Specifically, two control points are two end points of deflection curve, and they also limit the value range of the other control point; (2) the fitted NURBS curve contains information of all points in point set , but only three unknowns (, , ) need to be solved for each bending shape of tea stalk; and (3) all fitted NURBS curves of different bending shapes of the same tea stalk are intersected at a fixed point (origin of the coordinate system), and the angles are 0° between y-axis and the tangent lines at fixed point of fitted curves.
3.2. Calculation of the Flexural Rigidity of Tea Stalks
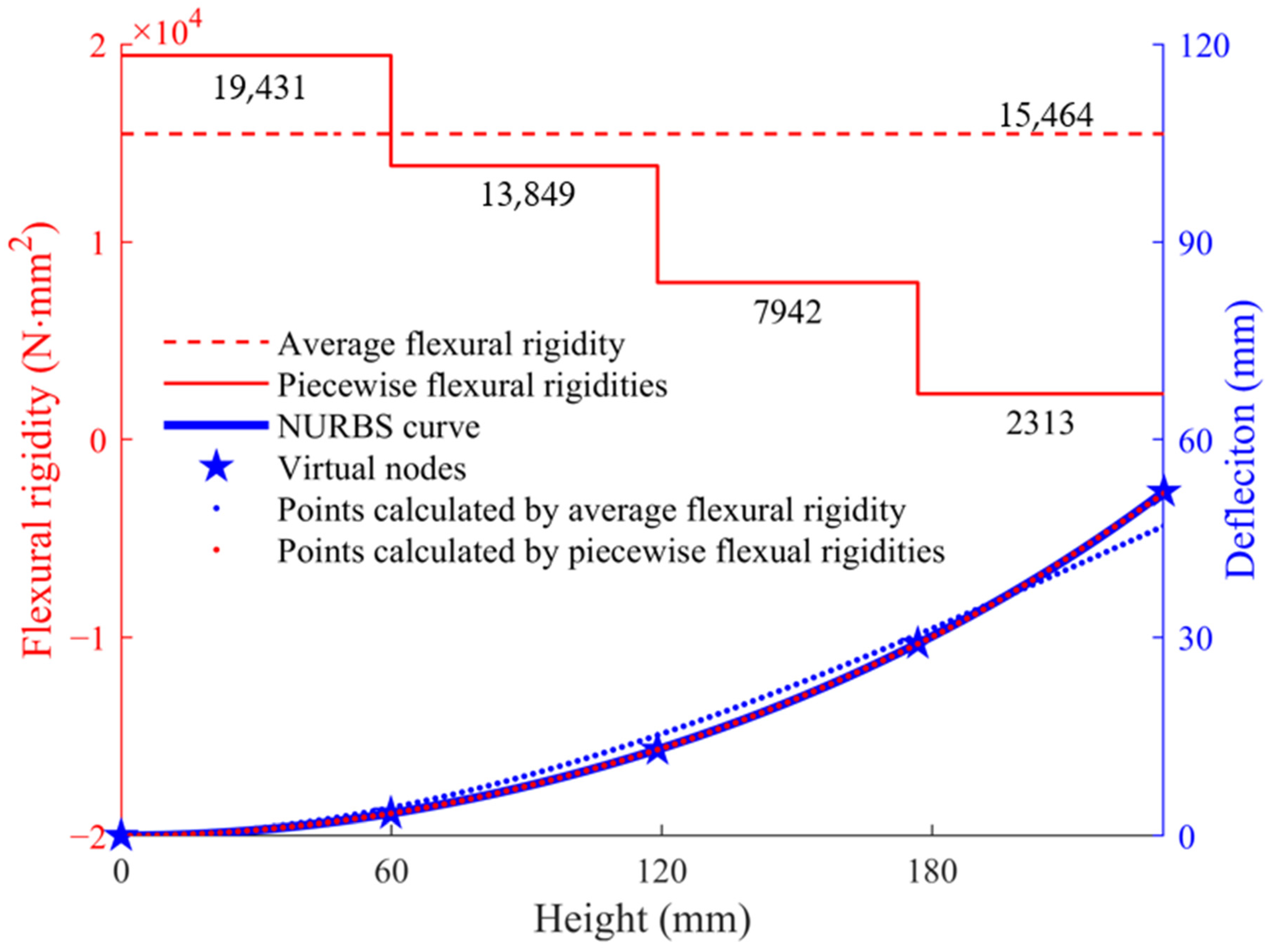
Figure 6 shows an example of the calculated average flexural rigidity and piecewise flexural rigidities according to the method presented in the
Figure 3a. The arc length of the NURBS curve was 239.36 mm and was divided into four virtual internodes, whose lengths of the first three virtual internodes were 60 mm, while the length of the last virtual internode was less than 60 mm. The average flexural rigidity and piecewise flexural rigidities are displayed in
Figure 6, and all digits after decimal point are not displayed in all figures. Using the average flexural rigidity and piecewise flexural rigidities respectively, 30 deflection points were calculated on each virtual internode and a total of 120 deflection points were obtained for each case. The maximum errors between the observed deflections and calculated deflections were −5.21 and 0.26 mm, respectively, and the root-mean-square errors (RMSE) were 1.78 and 0.05 mm, respectively.
The impact of length of virtual internode on flexural rigidity and deflection error have been assessed. As illustrated in
Figure 7, the values of flexural rigidity and deflection error were calculated under three different situations, namely three lengths (40, 60, and 80 mm) of the virtual internode, in which the tea stalk was divided into 6, 4, and 3 virtual internodes, respectively. Additionally, 30 points were calculated on each virtual internode.
The difference was in the low double digits among the calculated values of the average flexural rigidity in the three situations, and its mean value was displayed in
Figure 7a. Apparently, a larger error occurred on the deflections calculated by the average flexural rigidity than piecewise flexural rigidities, especially on the load point. Significantly, the deflections calculated by the average flexural rigidity were first larger and then smaller than the observed deflections as the length increased, as shown in
Figure 7b. More specifically, the deflection error increased from zero at first and then decreased to negative. Both phenomena demonstrated that the actual flexural rigidity decreased from the bottom to the top of the stalk. In all three situations, a downward trend of the flexural rigidity always appeared as the increase of length. The maximum deflection errors calculated by these piecewise flexural rigidities were smaller than 0.5 mm, and the shorter the length of virtual internode was, the smaller the RMSE value of the deflection error would be. Additionally, a relative larger deflection error appeared near the top end of the stalk. Similar results also occurred on other experimental tea stalks.
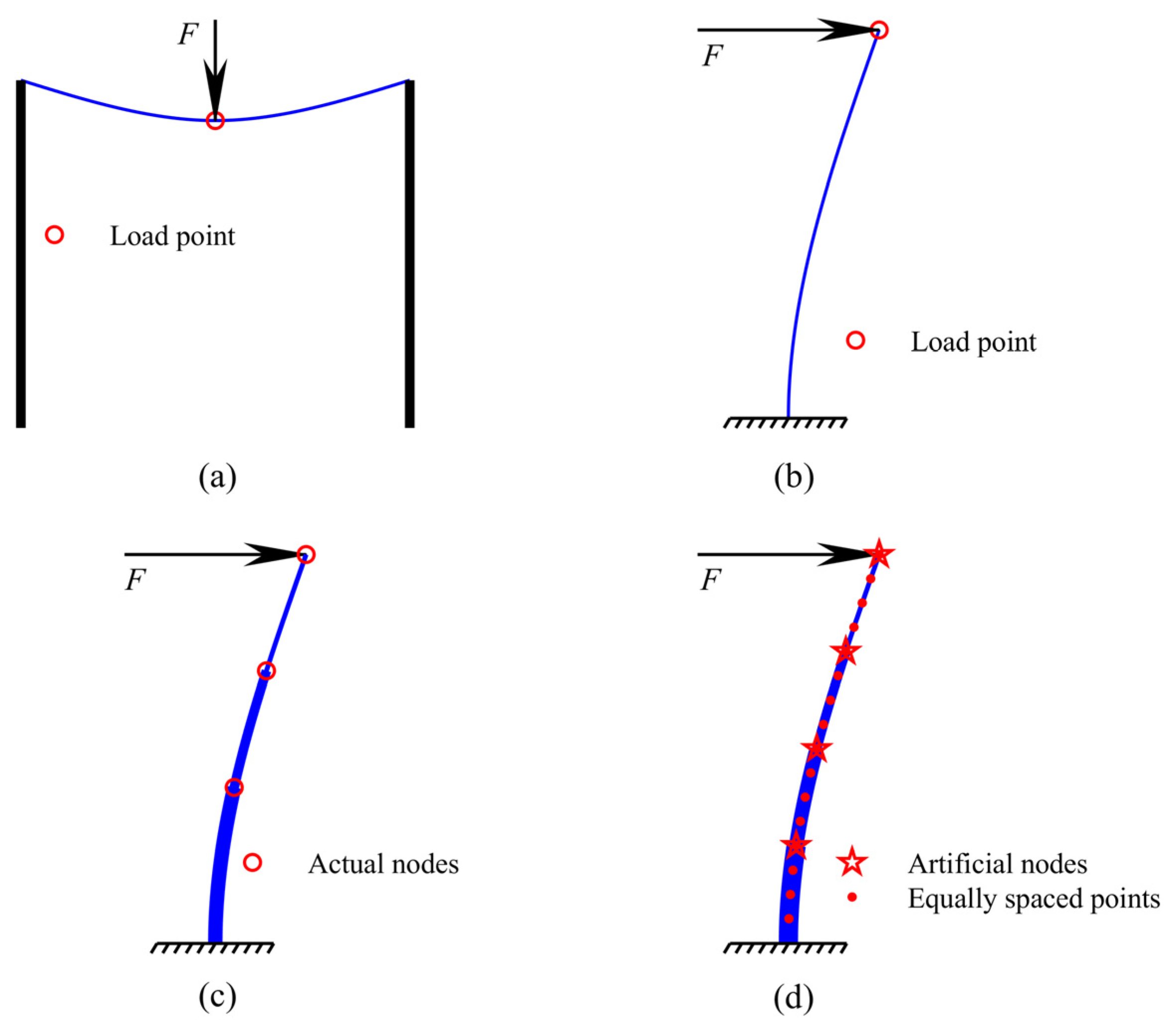
To calculate the flexural rigidity of the plant stalks, they are usually regarded as either a prismatic beam with constant flexural rigidity or a non-prismatic beam, in which each internode of the plant stalks is regarded as a prismatic beam with constant flexural rigidity. As shown in
Figure 8a and 8b, the whole stalk or the stalk’s segment was bended through a three-point bending test or cantilever test, and the average flexural rigidity was calculated according to the given load and deflection at load point by the approximate equations of the deflection curve of the simply supported beam or cantilever beam. The increase of deflection at the load point and length of test specimen would result in greater error in the calculated average flexural rigidity. To obtain the flexural rigidity of the crop stalks, Hirai et al. [
20] proposed an interesting calculation method, in which the flexural rigidities of all actual internodes were computed one-by-one based on the coordinates of each actual node, as shown in
Figure 8c. However, the flexural rigidity of an internode is very sensitive to the accuracy of the corresponding node’s coordinates, which is defined as the center coordinates of a black marker bonded to the node. Considering the measurement error, the obtained nodes may not be precisely located on the actual deflection curve. Additionally, a large error is likely to occur if only a node is considered when calculating the flexural rigidity of an internode, and the error would directly influence the subsequent calculations.
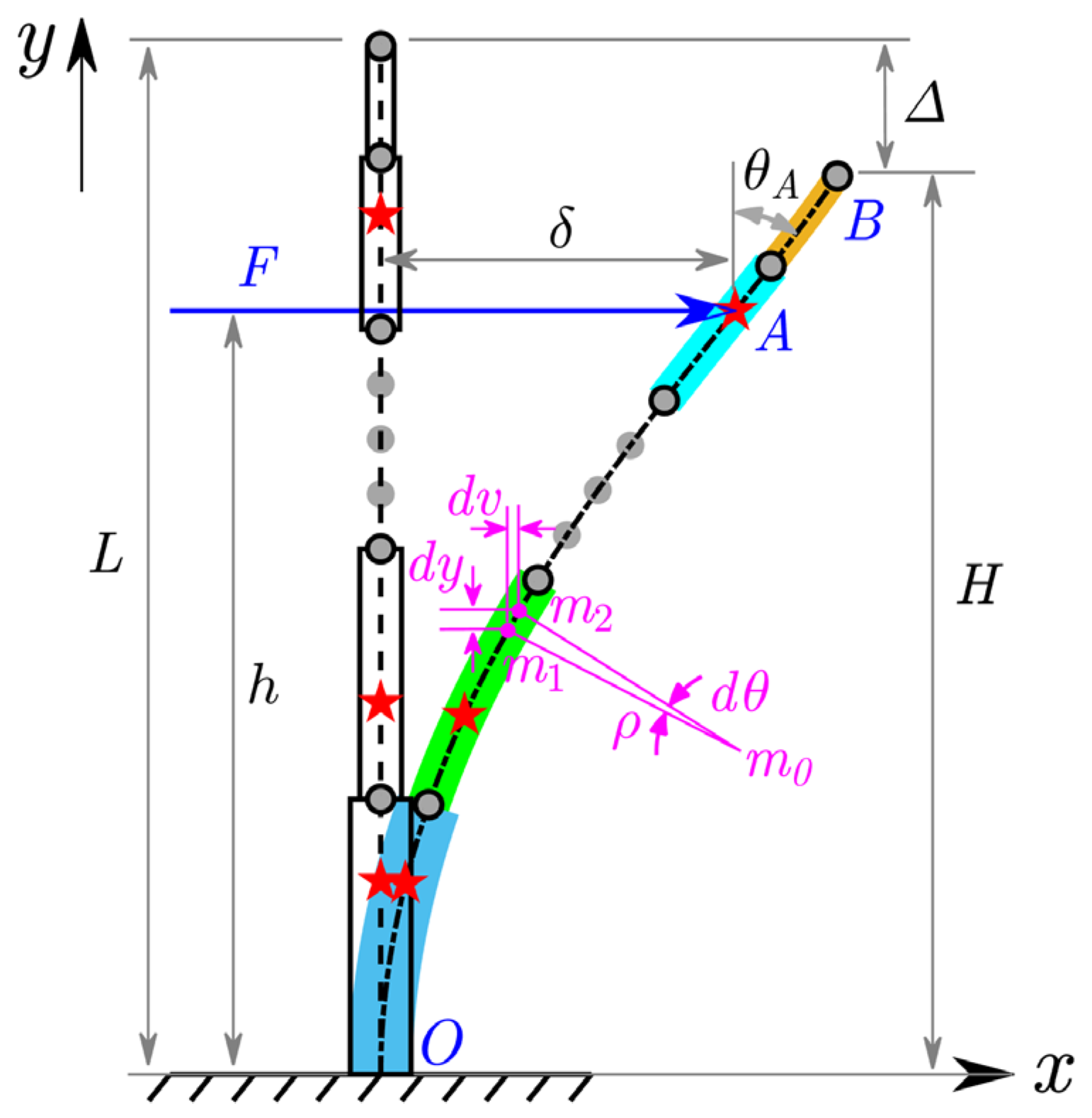
Generally, the diameter and maturity of tea stalk decreases from the lower end to the upper end, and it is harder to bend the lower region than the upper region. Intuitively, the flexural rigidity of the tea stalk decreases upward, and the trend may appear even at the same internode. Moreover, a large deflection usually occurs during the interaction between tea stalks and tea picking machines. Considering the shortcomings of traditional methods and the bending characteristics of tea stalks, the mechanical model based on a non-prismatic beam with virtual internodes was developed, by which the tea stalk can be freely divided into multiple virtual internodes by the given virtual nodes, which could be different from the actual nodes. The application of virtual nodes eliminates the limitations of actual nodes and therefore largely improves the flexibility of the model. Theoretically, the average flexural rigidity of any part, not only the actual internodes, of the plant stalk could be obtained. Flexural rigidities of all virtual internodes are determined simultaneously by solving an optimization problem, in which more points, not only virtual nodes, but also multiple equally spaced points in each virtual internode, as shown in
Figure 8d, are considered.
3.3. Deflection Prediction of Tea Stalks
According to the flow chart described in
Figure 3b, the deflection curve of tea stalk can be calculated approximately.
Figure 8a showed an example of the observed deflection curves and predicted deflection points of two bending shapes under given horizontal loads, using the same tea stalk as shown in
Figure 6. Specifically, 51 equally spaced heights from fixed point to load point were generated to calculate their deflections by the developed model of average flexural rigidity and that of piecewise flexural rigidities (the length of virtual internode was 60 mm), respectively. As shown in
Figure 9b, for shape 1, the maximum errors in deflection were 2.03 and 1.42 mm respectively, and the corresponding RMSE values of the deflection error were 1.27 and 0.64 mm, respectively; for shape 2, the maximum errors in deflection were 3.27 and −0.87 mm, respectively, and the corresponding RMSE values of deflection error were 1.98 and 0.51 mm, respectively. Generally, the deflection calculated by the developed model of piecewise flexural rigidities is much closer to the observed deflection than that calculated by the developed model of flexural rigidities.
It was noticed that the observed deflections were smaller than the calculated deflections for Shape 2 using the average flexural rigidity, which indicated that the actual average flexural rigidity of shape 2 was larger than the used average flexural rigidity. This phenomenon may be explained from two hands. On the one hand, the flexural rigidity decreases from the bottom to the top of the stalk. On the other hand, the arc length of shape 2 was shorter than the arc length corresponding to the used average flexural rigidity. According to the NURBS form expressions of the observed curves, the former was 193.37 mm, while the latter was 239.36 mm.
3.4. Analysis of the Flexural Rigidity of Tea Stalks
To analyze the influence of variety on the flexural rigidity, we calculate the average flexural rigidity and piecewise flexural rigidities of stalks of
Zhongcha 108 and
Maolv.
Table 1 presented part of the results, and the first four samples are stalks of
Zhongcha 108 while the last four samples are stalks of
Maolv. The flexural rigidity was calculated by the bending shape, whose load point was located on the third actual internode of the stalk. Each stalk was evenly divided into 4 virtual internodes, and 30 equally spaced
y-coordinates were generated to calculate the deflections in every virtual internode when solving the flexural rigidity.
RMSE1 and
RMSE2 are the RMSE values of the deflection error at the generated
y-coordinates for the mean value and piecewise flexural rigidities. The results showed that the average flexural rigidity changes largely for all the samples of the stalk. The calculated piecewise flexural rigidities illustrates that the flexural rigidity decreased from the bottom to the top region of the stalk, and they can calculate the deflection curve more accurately than the mean value. Qualitatively, there are no significant differences between the two varieties of tea plants.
4. Conclusions
The study focused on the bending behavior of tea stalk under the condition of large deflection. A method was proposed for determining the deflection curve of tea stalk based on the binocular vision technique and NURBS curve fitting technique. The results show that fitted 2nd-degree NURBS curves could accurately represent the deflection curves of tea stalks. According to the difference in resistance to bending among the different parts of tea stalk, the stalk model based on non-prismatic beam with virtual internodes was developed. By introducing the concepts of virtual internode and virtual node, tea stalk could be freely divided into multiple virtual internodes without the limitations of the actual internodes. With the NURBS curve and the model, the flexural rigidity of tea stalks and the deflection curve under given load can be calculated. The results illustrate that the stalks of two varieties of tea plants (Zhongcha 108 and Maolv) show similar bending characteristics. The flexural rigidity decreased from the bottom to the top of the stalk, and the flexural rigidity shows large differences among the experimental tea stalks.
The calculation method for flexural rigidity can be used to calculate the flexural rigidity of other plant stalks. The research work can be employed to investigate the relationship between quality indicators (length, breakage ratio of leaves, etc.) of harvested tea shoots and operational parameters such as the cutter’s structure, cutting height, forward speed, and cutting frequency of tea picking machines. Therefore, it can be further applied to the optimization design of the cutter and adaptive adjustment techniques for the machine.
Further study should be carried out to obtain the deflection curve of tea stalk with leaves, as well as the real time curve fitting technique. Additionally, it is necessary to study other appropriate methods to determine the positions of virtual nodes of tea stalk. More efficient algorithms should be developed to solve the optimization problems for the NURBS curve fitting and the calculation of flexural rigidity of tea stalk, respectively. Moreover, the developed model could be improved by: (1) considering the curvature of initial shape for curving stalks; (2) considering the impact of the weight of ear or fruits such as rice, wheat, and sunflower stalks.






 ) and pentagrams (
) and pentagrams (  ) represent the actual nodes and virtual nodes, respectively.
) represent the actual nodes and virtual nodes, respectively.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}