Research Progress and Prospect of Mechanized Harvesting Technology in the First Season of Ratoon Rice

Abstract
:1. Introduction
2. Harvest Pattern of Ratoon Rice in the First Season
3. Research Status of Mechanical Harvesting Equipment for Ratoon Rice in the First Season
3.1. Rolling Rate
3.2. Common Harvesters
3.3. Specialized Harvester for the First Season of Ratoon Rice
4. Research Status of Key Components of Ratoon Rice Harvester
4.1. Chassis
4.2. Header
4.3. Threshing and Cleaning
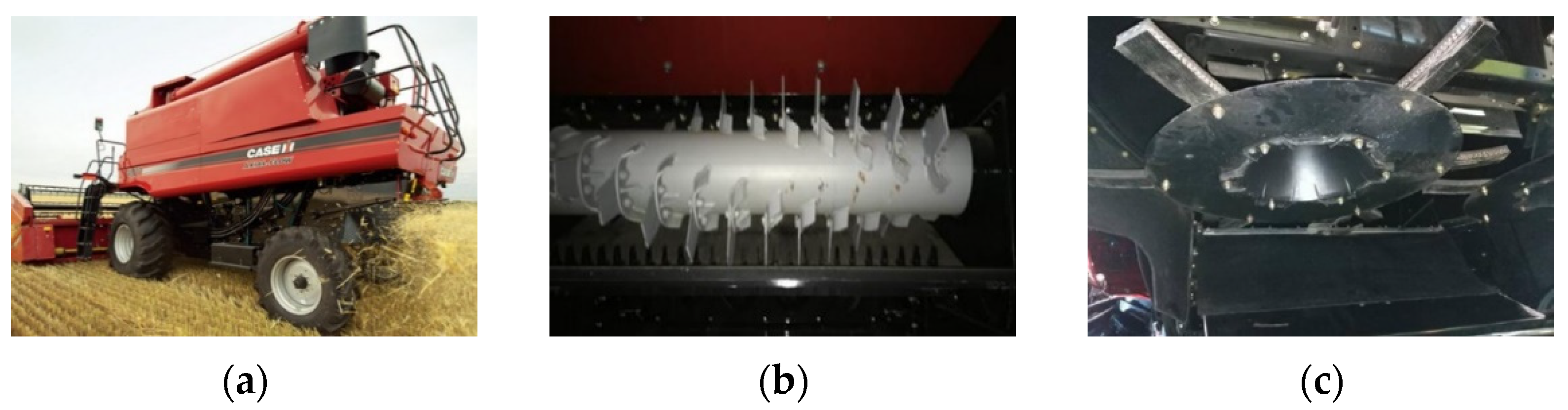
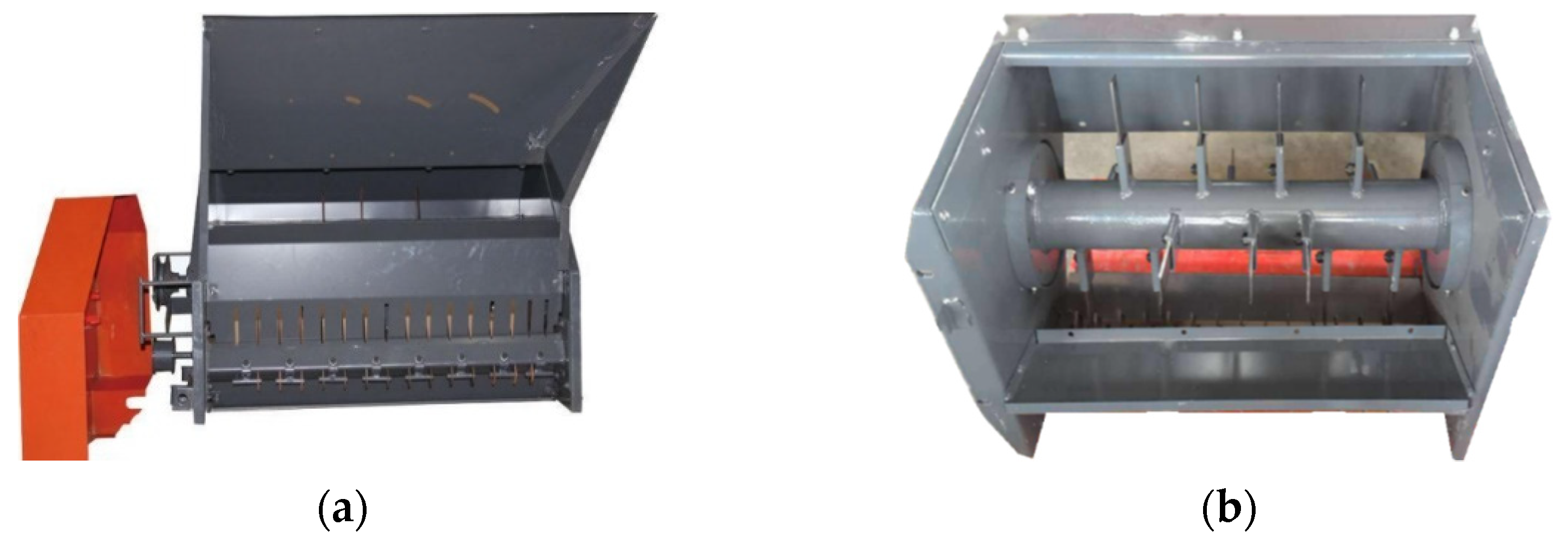
4.3.1. Threshing
4.3.2. Cleaning
4.4. Threshing and Cleaning Straw Disposal
4.4.1. Straw Smashing and Scattering
4.4.2. Straw Baling
4.5. Stubble Management
5. Application of Lightweight Technology
6. Application of Intelligent Harvesting Technology of Ratoon Rice
6.1. Performance Monitoring and Fault Diagnosis
6.2. Detection of Grain Quality
6.3. Automatic Navigation Technology
7. Analysis on Technical Difficulties and Development Trend of First Season Harvest of Ratoon Rice
7.1. Difficulties and Problems in Mechanical Harvesting of Ratoon Rice in the First Season
7.2. Development Trend of Machinery Harvesting in the First Season of Ratoon Rice
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xie, Y. Research of Physiol-Ecological Basis for High Quality and Water Efficiency of Ratoon Rice in Southeast Sichuan. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2015. [Google Scholar]
- Wang, X. Effects of Different Nitrogen Managements on Bud Growth and Nitrogen Utilization Characteristics in Ratoon Rice. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2018. [Google Scholar]
- Dong, H.; Chen, C.; Wang, W.; Peng, S.; Hang, J.; Cui, K.; Nie, L. The growth and yield of a wet-seeded rice-ratoon rice system in central China. Field Crops Res. 2017, 208, 55–59. [Google Scholar] [CrossRef]
- Ma, X. Studies on Variety Screening Ratoon Rice and the Effect of Main Crop Harvesting Model on Ratoon Crop Yield. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2015. [Google Scholar]
- Song, K.; Zhang, G.; Xu, H.; Ma, J. A review of research on influencing factors and sustainability of ratoon rice cultivation in China. Acta Pedol. Sin. 2020, 57, 1365–1377. [Google Scholar]
- Chen, Q.; He, A.; Wang, W.; Peng, S.; Huang, J.; Cui, K.; Nie, L. Comparisons of regeneration rate and yields performance between inbred and hybrid rice cultivars in a direct seeding rice-ratoon rice system in central China. Field Crop. Res. 2018, 223, 164–170. [Google Scholar] [CrossRef]
- Wang, F.; Huang, J.; Peng, S. Research and development of mechanized rice ratooning technology in China. China Rice 2021, 27, 1–6. [Google Scholar]
- Wang, F.; Peng, S. Research progress in rice green and high-yield management practices. Chin. Bull. Life Sci. 2018, 30, 1129–1136. [Google Scholar]
- Dong, C.; Xu, N.; Ding, C.; Gu, H.; Zhang, W.; Sun, L. Developing ratoon rice as forage in subtropical and temperate areas. Field Crops Res. 2020, 245, 135–147. [Google Scholar] [CrossRef]
- He, A.; Wang, W.; Jiang, G.; Sun, H.; Jiang, M.; Man, J.; Cui, K.; Huang, J.; Peng, S.; Nie, L. Source-sink regulation and its effects on the regeneration ability of ratoon rice. Field Crop. Res. 2019, 236, 155–164. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Q.; Zhang, W.; Li, S.; Huang, J.; Zhu, A.; Liu, L. Advances in the effects of the ability of axillary bud germination on grain yield in ratoon rice. Chin. J. Rice Sci. 2020, 34, 205–216. [Google Scholar]
- Lei, Z. Design and Performance Experiment of a Tracked Chassis of Harvester for Ratoon Rice. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2017. [Google Scholar]
- Zhang, G.; Zhang, Y.; Huang, J.; Zhai, K.; Zhou, Y.; Huang, H.; Fan, Q. Designing and performance testing a novel head spike harvester of ratoon rice. J. Huazhong Agric. Univ. 2016, 35, 131–136. [Google Scholar]
- Fu, J.; Zhang, G.; Anwer, A.M.; Gao, Y.; Zhou, Y.; Huang, H.; Liu, H.; Tan, A. Development of the high clearance wheel-type ratoon rice harvester. Int. Agric. Eng. J. 2020, 29, 161–171. [Google Scholar]
- Lu, K.; Zhang, G.; Peng, S.; Lei, Z.; Fu, J.; Zha, X.; Zhou, Y. Design and performance of tracked harvester for ratoon rice with double-headers and double-threshing cylinders. J. Huazhong Agric. Univ. 2017, 36, 108–114. [Google Scholar]
- Fu, J.; Zhang, G.; Xie, G.; Wang, Y.; Gao, Y.; Zhou, Y. Development of double-channel feeding harvester for ratoon rice. Trans. CSAE 2020, 36, 11–20. [Google Scholar]
- Yang, Y.; Liu, J.; Huang, D.; Zeng, S.; Lai, Q. Design of full-feeding ratoon rice combine harvester. Hubei Agric. Sci. 2019, 58, 129–132, 140. [Google Scholar]
- Zeng, S.; Huang, P.; Yang, W.; Liu, W.; Wen, Z.; Zeng, L. Design and test of the chassis of triangular crawler reclaiming rice harvester. J. Jilin Univ. Eng. Technol. Ed. 2021, 1–9. [Google Scholar] [CrossRef]
- Shi, M. World joined hands with Jiangsu University to launch low rolling rate harvester. Agric. Mach. Qual. Superv. 2021, 9, 41. [Google Scholar]
- Guo, H.; Lin, J.; Shi, H.; Zhang, X. Present situation and development trend of first harvest mechanization of ratoon rice. Fujian Agric. Mach. 2016, 1, 16–18. [Google Scholar]
- He, S.; Dang, H.; Wang, Y. Mechanized harvest technology of single-season rice and ratoon rice in the first second. J. Zhejiang Agric. Sci. 2015, 56, 787–789. [Google Scholar]
- Qian, T.; Mei, S.; Zhang, J.; Yu, J.; Zhai, Z.; Fang, X.; Chen, J.; Zhang, C.; Wei, T. Yield and yield components of ratoon rice with different stubble height and harvest methods. Hubei Agric. Sci. 2015, 54, 14–17. [Google Scholar]
- Lei, Z.; Zhang, G.; Peng, S.; Lu, K.; Fu, J.; Zha, X.; Zhou, Y. Simulation and analysis of the stubble pushing rate by chassis of the completely tracked harvester for the ratoon rice. J. Anhui Agric. Univ. 2017, 44, 738–743. [Google Scholar]
- Lin, X.; Lei, Z.; Guo, S.; Chen, L.; Wu, X. A Loss Reducing Track for Ratoon Rice Harvest. China Patent No. 209241197U, 13 August 2019. [Google Scholar]
- Lin, F.; Zhang, X.; Ren, J. Diamond-Shaped Four-Wheel Stubble Avoiding Chassis of Ratoon Rice Harvester. China Patent No. 205848037U, 4 January 2017. [Google Scholar]
- Yan, K. John Deere S660 combine harvester. Mod. Agric. 2016, 5, 44. [Google Scholar]
- Liu, J. Nine advantages of CLAAS TUCANO series harvesters. Agric. Mach. Qual. Superv. 2020, 4, 41–42. [Google Scholar]
- Hirai, Y.; Inoue, E.; Mori, K. Application of a quasi-static stalk bending analysis to the dynamic response of rice and wheat stalks gathered by a combine harvester reel. Biosyst. Eng. 2004, 88, 281–294. [Google Scholar] [CrossRef]
- Maughan, J.D.; Mathanker, S.K.; Fehrenbacher, B.M.; Hansen, A.C. Impact of cutting speed and blade configuration on energy requirement for Miscanthus harvesting. Appl. Eng. Agric. 2014, 30, 137–142. [Google Scholar]
- Sharobeem, Y.F. Development of a special combine header for harvesting canola. J. Soil Sci. Agric. Eng. 2007, 32, 491–502. [Google Scholar] [CrossRef]
- Pari, L.; Assirelli, A.; Suardi, A.; Civitarese, V.; Del Giudice, A.; Costa, C.; Santangelo, E. The harvest of oilseed rape (Brassica napus L.): The effective yield losses at on-farm scale in the Italian area. Biomass Bioenergy 2012, 46, 453–458. [Google Scholar] [CrossRef]
- Fuchs, V.; Veit, P.; Rittershofer, M. Feederhouse for a Combine Harvester. U.S. Patent No. 20160037724, 11 February 2016. [Google Scholar]
- Chaab, R.K.; Karparvarfard, S.H.; Rahmanian, K.H.; Mortezaei, A.; Mohammadi, M. Predicting header wheat loss in a combine harvester, a new approach. J. Saudi Soc. Agric. Sci. 2020, 19, 179–184. [Google Scholar] [CrossRef]
- Zareei, S.; Pour, S.A.; Moghaddam, M.; Sahrayan, H. Optimum setting of combine header for wheat harvesting using Taguchi method. Res. Crop. 2012, 13, 1142–1146. [Google Scholar]
- Hobson, R.N.; Bruce, D.M. Seed loss when cutting a standing crop of oilseed rape with two types of combine harvester header. Biosyst. Eng. 2002, 81, 281–286. [Google Scholar] [CrossRef]
- Lopes, G.T.; Magalhães, P.S.G.; Nóbrega, E.G.O. Ae–automation and engineering technologies: Optimal header height control system for combine harvesters. Biosyst. Eng. 2002, 81, 261–272. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, D.; Xu, Z.; Yang, Y. Experiment of the foldable header of corn harvester. J. Agric. Mech. Res. 2013, 35, 117–120. [Google Scholar]
- Li, H.; Liao, Q.; Li, P.; Huang, P.; Wan, X.; Ji, M. Design on separating-combined header of rape combine harvester. J. Huazhong Agric. Univ. 2014, 33, 111–116. [Google Scholar]
- Ji, M.; Liao, Q.; Li, H.; Wan, X.; Wang, H.; Zhao, Y. Designing rapeseed harvester combined stripping table with cutting table. J. Huazhong Agric. Univ. 2016, 35, 117–124. [Google Scholar]
- Qian, Y. Based on the 4LZ-1.0 Type Combines Lightweight Design Improvements. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2016. [Google Scholar]
- Li, Y.; Yi, Y.; Du, S.; Ding, Q.; Ding, W. Design and experiment on air blowing header of plot combine harvester for grain. Trans. CSAM 2017, 48, 79–87. [Google Scholar]
- Liu, W.; Huang, X.; Ma, L.; Zong, W.; Zhu, Y. Design and experiment of special header of oil sunflower combine harvester. Trans. CSAM 2020, 51, 83–88. [Google Scholar]
- Zhao, Y.; Shi, R.; Dai, F. Design for anti-winding header of the flax combine harvester. Mech. Res. Appl. 2020, 33, 30–33. [Google Scholar]
- Chen, A. Design and Test of Additional Cutters of the Ratoon Rice Harvester. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2020. [Google Scholar]
- Fu, J. Development of Double-Channel Full Feeding Harvester for Ratoon Rice. Ph.D. Thesis, Huazhong Agricultural University, Wuhan, China, 2020. [Google Scholar]
- Chinese Academy of Agricultural Mechanization Sciences. Agricultural Machinery Design Manual (Volume 2); China Agricultural Science and Technology Press: Beijing, China, 2007. [Google Scholar]
- Lu, K. Design and Performance Experiment of a Small Horizontal-Axial Threshing and Separating Device for Ratoon Rice. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2017. [Google Scholar]
- Li, J. Design and Performance Experiment of Feeder House and Threshing Separation Device for Ratoon Rice Combine Harvester. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2020. [Google Scholar]
- Li, Y.; Li, J.; Huang, M.; Wang, H.; Chen, A. Integrated Device for Threshing, Smashing, and Scattering of Ratoon Rice. China Patent No. 110731173A, 31 January 2020. [Google Scholar]
- Li, B.; Qu, Y.; Song, J. Agricultural Machinery; China Agriculture Press: Beijing, China, 2003. [Google Scholar]
- Dai, F. Study on the Separating-Cleaning Mechanism and Key Technology of Flax Threshing Material. Ph.D. Thesis, Gansu Agricultural University, Lanzhou, China, 2020. [Google Scholar]
- Liu, Z.; Zheng, Y.; Wang, Z.; Chen, D.; Wang, J. Design on air-flowing cleaning unit of micro rice-wheat combine harvester. Trans. CSAM 2015, 46, 102–108. [Google Scholar]
- Zhang, M.; Jin, C.; Liang, S.; Tang, Q.; Wu, C. Parameter optimization and experiment on air-screen cleaning device of rapeseed combine harvester. Trans. CSAE 2015, 31, 8–15. [Google Scholar]
- Geng, R.; Mou, X.; Zhang, G.; Wang, Z.; Zhu, J.; Xu, H. Analysis and optimization of cleaning mechanism of wheat combine harvester. J. Jilin Univ. Eng. Technol. Ed. 2022, 52, 219–230. [Google Scholar]
- Wang, H. Design and Experiment of the Cleaning Device for the Combined Harvester of Ratooning Rice. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2020. [Google Scholar]
- CASEIH. CASE 4000 series axial flow harvester. Xinjiang Agric. Mech. 2018, 6, 41–42. [Google Scholar]
- Kubota. KubotamPRO1108 harvester. Farm Mach. 2020, 7, 33. [Google Scholar]
- Luo, X.; Zhi, G. Top 10 harvesters in 2018. Farm Mach. 2019, 6, 22–23. [Google Scholar]
- Thakur, S.S.; Garg, I.K. Paddy straw management by chopping for sowing wheat in combine harvested field. J. Res. 2007, 44, 243–248. [Google Scholar]
- Schillinger, W.F.; Smith, T.A.; Schafer, H.L. Chaff and straw spreader for a plot combine. Agron. J. 2008, 100, 398–399. [Google Scholar] [CrossRef] [Green Version]
- Veikle, E. Modeling the Power Requirements of a Rotary Feeding and Cutting System; University of Saskatchewan: Saskatoon, SK, Canada, 2011. [Google Scholar]
- Korn, C.; Fehrmann, J.; Herlitzius, T.; Flanhardt, M.; Acimas, A. Development of a straw chopper for combines for increased working width. Landtechnik 2012, 67, 11–16. [Google Scholar]
- Lisowski, A.; Świątek, K.; Klonowski, J.; Sypuła, M.; Chlebowski, J.; Nowakowski, T.; Kostyra, K.; Strużyk, A. Movement of chopped material in the discharge spout of forage harvester with a flywheel chopping unit: Measurements using maize and numerical simulation. Biosyst. Eng. 2012, 111, 381–391. [Google Scholar] [CrossRef]
- Virk, G. Performance Evaluation of Paddy Straw Chopper with Combine Cutting Head Mechanism. Ph.D. Thesis, Punjab Agricultural University, Ludhiana, India, 2016. [Google Scholar]
- Chen, L.; Wang, L.; Zhang, J.; Zhang, J.; He, C. Design of 1JHSX-34 straw crusher for whole-feeding combine harvesters. Trans. CSAE 2011, 27, 28–32. [Google Scholar]
- Lu, J.; Miu, M.; Zhao, M.; Cao, L.; Wang, Y. Study on rice and wheat straw scattering and returning machine matched with semi-feeding combine harvester. Agric. Equip. Technol. 2014, 40, 13–16. [Google Scholar]
- Chen, D.; Ma, Y.; Hao, J.; Zhao, J.; Yang, X.; Li, J.; Yan, T. The design for grinding blade of reaping corn and stalk corn harvester. J. Agric. Mech. Res. 2018, 40, 72–77. [Google Scholar]
- Wang, L.; Zhang, Z.; Liu, T.; Wang, Y.; Jia, F.; Jiang, J. Design and experiment of device for chopping stalk of header of maize harvester. Trans. CSAM 2020, 51, 109–117. [Google Scholar]
- Wu, W.; Li, J.; Liao, Y.; Wang, L. Design of rice straw crushing and returning device for combine harvester. Agric. Equip. Veh. Eng. 2020, 58, 11–14. [Google Scholar]
- Huang, J.; Zhang, B.; Tian, K.; Shen, C.; Li, X.; Wang, S. Design and experiment on the 4LYZ-3K corn combine harvesting both stalk and spike. J. Chin. Agric. Mech. 2018, 39, 7–11, 27. [Google Scholar]
- Yan, X.; Zhao, Y.; Cai, D.; Wang, Y.; Tian, M. Design of all-feed crawler self-propelled harvesting and bundling integrated machine. Tract. Fam Transp. 2020, 47, 52–54. [Google Scholar]
- Zhang, S.; Dai, F.; Zhao, W.; Tian, B.; Chen, B. Design and test of matching straw baling device for highland barley combine harvester. Acta Agric. Zhejiangensis 2020, 32, 1289–1301. [Google Scholar]
- Wu, G. Optimal Design and Experiment of Matching Baler for Combine Harvester. Master’s Thesis, Henan Agricultural University, Zhengzhou, China, 2017. [Google Scholar]
- Jin, C.; Tang, Z.; Jin, M.; Wu, C. Design and experiment of straight baler device behind combine. J. Agric. Mech. Res. 2011, 33, 147–150. [Google Scholar]
- Li, Y.; Chen, C.; Xu, L. Design and experiment of baler for 4L-4.0 combine harvester of rice and wheat. Trans. CSAE 2016, 32, 29–35. [Google Scholar]
- Xu, L.; Sun, Y.; Chen, T.; Li, Y. An Automatic Stubble Righting and Guiding Device for Ratoon Rice and Its Regulation Method. China Patent No. CN111296049A, 19 June 2020. [Google Scholar]
- Lin, W.; Zhang, G.; Peng, S.; Zhou, Y.; Jiang, Q.; Xu, J. Stubble Righting Device for Ratoon Rice. China Patent No. CN107006228B, 4 December 2020. [Google Scholar]
- Zhang, X. Design and Experiment of Regenerative Rice Chain Row Claw Type Righting Device. Master’s Thesis, Jiangxi Agricultural University, Nanchang, China, 2019. [Google Scholar]
- Xiong, S. Amphibious Miniature Harvester. China Patent No. 104255180A, 7 January 2015. [Google Scholar]
- Xu, L.; Li, Y.; Zhang, W.; Li, Y. A Combine Harvester for Ratoon Rice. China Patent No. 209732022U, 6 December 2019. [Google Scholar]
- Li, Y.; Wang, H.; Huang, M.; Li, J.; Chen, A. A Double Inlet Cyclone Cleaning Device and Ratoon Rice Combine Harvester. China Patent No. 110140531A, 20 August 2019. [Google Scholar]
- Jiao, C. The Optimization Design of the Body in Combined Harvester. Master’s Thesis, Hebei University of Technology, Tianjin, China, 2015. [Google Scholar]
- Zang, S. Combine Harvester Threshing Machine Finite Element Analysis and Optimization. Master’s Thesis, Anhui Agricultural University, Hefei, China, 2016. [Google Scholar]
- Feng, W.; Pang, Y.; Li, P.; Cui, J.; Zhang, X.; Zhan, X. Lightweight design for rack of small harvester based on ISIGHT. Southwest China J. Agric. Sci. 2019, 32, 174–178. [Google Scholar]
- Zhou, L. Study on Intensity Analysis and Fatigue Life of Corn Combine Chassis Machine Frame. Master’s Thesis, Chinese Academy of Agricultural Mechanization Sciences, Beijing, China, 2015. [Google Scholar]
- Yan, Q.; Deng, X.; Chen, D.; Song, H.; Wang, Y.; Xia, K. Static analysis and topology optimization design of grain thresher rack. J. Yancheng Inst. Technol. Nat. Sci. Ed. 2019, 32, 12–17. [Google Scholar]
- Li, Y.; Li, Y.; Xu, L.; Hu, B.; Wang, R. Structural parameter optimization of combine harvester cutting bench. Trans. CSAE 2014, 30, 30–37. [Google Scholar]
- Long, C.; Jin, Q.; Chen, Z.; Wen, G. Finite element analysis and optimization of rhombus harvester frame. Mech. Sci. Technol. Aerosp. Eng. 2014, 33, 8–12. [Google Scholar]
- Sun, X.; Lin, J.; Liu, C.; Li, Z. Lightweight design and economic analysis of header of rice harvester. Jiangsu Agric. Sci. 2019, 47, 182–186. [Google Scholar]
- Ma, L.; Mao, E.; Zhu, Z.; Song, Z. Optimized design of steering axle housing for wheeled combine harvester. Trans. CSAM 2013, 44, 272, 283–287. [Google Scholar]
- Li, Y.; Xu, Z.; Zhang, L.; Du, J.; Jiang, Y. Light weight design of chassis frame for a soybean harvester. J. Chongqing Univ. 2019, 42, 14–21. [Google Scholar]
- Luo, X.; Liao, J.; Hu, L.; Zhou, Z.; Zhang, Z.; Zang, Y.; Wang, P.; He, J. Research progress of intelligent agricultural machinery and practice of unmanned farm in China. J. South China Agric. Univ. 2021, 42, 5, 8–17. [Google Scholar]
- Zhu, K.; Shan, Q.; Yan, K. John Deere 70 series STS combine harvester. Mod. Agric. 2007, 12, 31. [Google Scholar]
- Guan, Q. Upgrade CASE axial flow drum combine harvester. Agric. Mach. Technol. Ext. 2017, 5, 69. [Google Scholar]
- New Holland. New Holland combine harvester. Farm Mach. 2019, 9, 123. [Google Scholar]
- Wei, L.; Che, Y.; Wang, F.; Li, W. Design and experiment of the ground profiling control system of combine header. J. Agric. Mech. Res. 2017, 39, 150–154. [Google Scholar]
- Li, Y.; Wang, J.; Xu, L.; Tang, Z.; Xu, Z.; Wang, K. Design and experiment on adjusting mechanism of concave clearance of combine harvester cylinder. Trans. CSAM 2018, 49, 68–75. [Google Scholar]
- Zhao, S.; Zhang, G.; Zhang, S.; Fu, J.; Xie, G.; Anwer, A.M. Designing a real-time feed measurement system for horizontal axial flow threshing drum based on thin film sensor. J. Huazhong Agric. Univ. 2020, 39, 160–169. [Google Scholar]
- Liao, Y.; Xiang, Y.; Wu, M.; Liu, D.; Chen, Y.; Li, Y. Design and test of the adaptive height adjustment system for header of the combine-harvester. J. Hunan Agric. Univ. Nat. Sci. 2018, 44, 326–329. [Google Scholar]
- Zhang, X.; Li, Y. Header height control strategy of harvester based on robust feedback linearization. Trans. CSAM 2020, 51, 123–130. [Google Scholar]
- Chen, J.; Wang, S.; Lian, Y. Design and test of header parameter keys electric control adjusting device for rice and wheat combined harvester. Trans. CSAE 2018, 34, 19–26. [Google Scholar]
- Chen, J.; Ji, Y.; Li, Y. Monitoring system of combine harvester based on PLC and touch-screen. Instrum. Tech. Sens. 2014, 7, 78–81. [Google Scholar]
- Xi, C.; Yang, G.; Liu, L.; Liu, J.; Chen, X.; Ma, Z. Operation faults monitoring of combine harvester based on SDAE-BP. Trans. CSAE 2020, 36, 46–53. [Google Scholar]
- Xu, K. Blockage Fault Diagnosis and Alarm System for Combine Harvester Based on BPNN and DS Theory. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2016. [Google Scholar]
- Li, Z. Research on Remote Monitoring Platform and Fault Analysis of Combine Harvester. Master’s Thesis, Hubei University of Technology, Wuhan, China, 2019. [Google Scholar]
- Liu, J. Innovative technology of CLAAS harvesting machinery. Agric. Eng. 2019, 9, 18–21. [Google Scholar]
- Pourreza, A.; Pourreza, H.; Abbaspour-Fard, M.H.; Sadrnia, H. Identification of nine Iranian wheat seed varieties by textural analysis with image processing. Comput. Electron. Agric. 2012, 83, 102–108. [Google Scholar] [CrossRef]
- Craessaerts, G.; Baerdemaeker, J.; Missotten, B.; Saeys, W. Fuzzy control of the cleaning process on a combine harvester. Biosyst. Eng. 2010, 106, 103–111. [Google Scholar] [CrossRef]
- Wallays, C.; Missotten, B.; Baerdemaeker, J.; Saeys, W. Hyperspectral waveband selection for on-line measurement of grain cleanness. Biosyst. Eng. 2009, 104, 1–7. [Google Scholar] [CrossRef]
- Chen, J.; Gu, Y.; Lian, Y.; Han, M. Online recognition method of impurities and broken paddy grains based on machine vision. Trans. CSAE 2018, 34, 187–194. [Google Scholar]
- Chen, X. Research on the Methods and Systems for Monitoring Grain’s Crushing Rate and Impurity Rate for Combine Harvester. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2017. [Google Scholar]
- Su, Y. Research on Grain Water Content Detection and Impurities Recognition Method Based on Machine Vision and Hyperspectral Imaging Technique. Master’s Thesis, Zhejiang University, Hangzhou, China, 2011. [Google Scholar]
- Li, Y.; Chen, Y.; Zhao, Z.; Xu, L. Monitoring method and device for cleaning loss of combine harvester. Trans. CSAM 2013, 44, 7–11. [Google Scholar]
- Liang, Z.; Li, Y.; Zhao, Z.; Xu, L.; Tang, Z. Monitoring mathematical model of grain cleaning losses on longitudinal-axial flow combine harvester. Trans. CSAM 2015, 46, 106–111. [Google Scholar]
- Wang, Z.; Che, D.; Bai, X.; Hu, H. Improvement and experiment of cleaning loss rate monitoring device for corn combine harvester. Trans. CSAM 2018, 49, 100–108. [Google Scholar]
- Zhang, G.; Jin, C.; Yang, T.; Liu, Z.; Chen, M.; Zhou, D. Design and implementation of cleaning loss rate monitoring system for combine harvester. J. Chin. Agric. Mech. 2019, 40, 146–150. [Google Scholar]
- Jiang, Q.; Wang, L.; Huang, H.; Zhang, Z.; Wang, R.; Li, B. The multiple nonlinear prediction model of cleaning loss rate of rice-wheat combine harvester in field operation environment. J. Jiangxi Norm. Univ. Nat. Sci. 2021, 45, 126–130. [Google Scholar]
- Kurita, H.; Iida, M.; Cho, W.; Suguri, M. Rice autonomous harvesting: Operation framework. J. Field Robot. 2017, 34, 1084–1099. [Google Scholar] [CrossRef]
- Zhao, T. Development of Automatic Navigation Method for Combine Harvester Based on Laser Scanner. Ph.D. Thesis, Northwest A&F University, Yangling, China, 2017. [Google Scholar]
- Zhang, W.; Guo, Y.; Chen, K.; Wei, L.; Yuan, Y. RAC navigation system of harvester based on pre-adaptive path tracking model. China Agric. Inform. 2020, 32, 1–8. [Google Scholar]
- Sun, J. Research on Auxiliary Navigation System of Combine Harvester Based on Beidou and Vision. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2020. [Google Scholar]
- Guan, Z. The Key Technology of Auxiliary Navigation System for Crawler Rice Combine Harvester. Ph.D. Thesis, Huazhong Agricultural University, Wuhan, China, 2020. [Google Scholar]
- Ding, Y.; Wang, X.; Peng, J.; Xia, Z. Visual navigation system for wheel-type grain combine harvester. Smart Agric. 2020, 2, 89–102. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Feeding Rate/ (kg/s) | Cutting Width/ mm | Track Gauge/ mm | Track Grounding Length/mm | Track Width/ mm | Minimum Ground Clearance/mm | Vehicle Weight/ kg | Straight Rolling Rate/% | Grounding Pressure/ kPa |
|---|---|---|---|---|---|---|---|---|---|
| Liulin 4LZ-4.0B | 4.0 | 2100 | 1150 | 1650 | 450 | 350 | 3280 | 42.86 | 22.09 |
| Kubota PRO988Q | 4.0 | 2300 | 1350 | 1890 | 500 | 290 | 3670 | 43.48 | 19.42 |
| WORLD 4LZ-4.0E | 4.0 | 2000 | 1150 | 1650 | 450 | 320 | 3000 | 45.00 | 20.20 |
| Donghe 4LZ-4.0Z | 4.0 | 2000 | 1150 | 1650 | 450 | 345 | 3170 | 45.00 | 21.35 |
| Yanmar 4LZ-4.5A | 4.5 | 2060 | 1215 | 1885 | 550 | 350 | 4030 | 53.40 | 19.10 |
| Zoomlion PL60 4LZT-6.0ZC1 | 6.0 | 2100 | 1150 | 1650 | 450 | 315 | 3310 | 42.86 | 22.29 |
| R&D Unit | Type | Structure and Effect | Structure Features and Main Performance |
|---|---|---|---|
| Huazhong Agricultural University | Grain header |  | Harvest the ear head only; Transplanter chassis; No rolling walking in the row; Cutting width 1600 mm; Wheel width 90 mm; Working speed 0.37–0.69 m/s; Walking power 9.5 kW; Working power 6.3 kW; Feeding rate 1.8 kg/s; Productivity 3.6 mu/h. |
| Huazhong Agricultural University | Light high clearance wheel harvester |  | Transplanter chassis; No rolling walking in the row; Cutting width 1600 mm; Wheel width 90 mm; Working speed 0.35 m/s; Walking power 9.5 kW; Working power 20.1 kW; Feeding rate 1.4 kg/s; Productivity 2.2 mu/h. |
| Huazhong Agricultural University | Track harvester with double headers double threshing cylinders |  | Crawler chassis; Rolling rate 28%; 1 walking chassis; 2 sets of headers; 2 sets of threshing and cleaning devices; peg-tooth transverse axial flow drum; pneumatic cleaning; Cutting width 2550 mm; Working speed 0.24 m/s; Walking power 13.2 kW; Working power 20 kW; Feeding rate 1.6 kg/s; Productivity 2.0 mu/h; Rolling rate 27.5%. |
| Huazhong Agricultural University | 4LZ-4.0-type double-channel feeding harvester |  | 1 crawler chassis; 1 double-channel header; 2 sets of symmetrically arranged threshing and cleaning devices and smashing and scattering devices; 1 grain bin; Cutting width 3000 mm; Gauge of the chassis 1500 mm; Track grounding length 1800 mm; Track width 400 mm; Working speed 0.8 m/s; Feeding rate 4.0 kg/s; Productivity 2.0 mu/h; Rolling rate 26.7%. |
| South China Agricultural University | Wheel-type harvester |  | High clearance 4WD Chassis; 125 mm solid narrow wheel for paddy field; Ground clearance 600 mm; Cutting width 2100 mm; Working speed 0.53 m/s; Power 36.8 kW; Feeding rate 2.0 kg/s; Productivity 2.0 mu/h. |
| South China Agricultural University | Triangular crawler harvester |  | Triangular crawler; Track width 280 mm; Wheel track 1500 mm; Wheelbase 1800 mm; Track grounding length 800 mm; Minimum ground clearance 600 mm; Working speed 0–4.5 m/s; Power 74.5 kW; Feeding rate 4.0 kg/s; Productivity 4.0 mu/h; Rolling rate 31.7%; |
| Jiangsu University | 4LZ-5.0-type combine harvester |  | Crawler chassis; Cutting width 2800 mm; Track width 300 mm; Feeding rate 5.0 kg/s; Productivity 2.0 mu/h; Rolling rate 26.9%. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, J.; Ji, C.; Liu, H.; Wang, W.; Zhang, G.; Gao, Y.; Zhou, Y.; Abdeen, M.A. Research Progress and Prospect of Mechanized Harvesting Technology in the First Season of Ratoon Rice. Agriculture 2022, 12, 620. https://doi.org/10.3390/agriculture12050620
Fu J, Ji C, Liu H, Wang W, Zhang G, Gao Y, Zhou Y, Abdeen MA. Research Progress and Prospect of Mechanized Harvesting Technology in the First Season of Ratoon Rice. Agriculture. 2022; 12(5):620. https://doi.org/10.3390/agriculture12050620
Chicago/Turabian StyleFu, Jianwei, Chao Ji, Haopeng Liu, Weikang Wang, Guozhong Zhang, Yuan Gao, Yong Zhou, and Mohamed Anwer Abdeen. 2022. "Research Progress and Prospect of Mechanized Harvesting Technology in the First Season of Ratoon Rice" Agriculture 12, no. 5: 620. https://doi.org/10.3390/agriculture12050620