
Design of Stretchable Style Pick-Up Device for Tomato Seedling Transplanters

Abstract
:1. Introduction
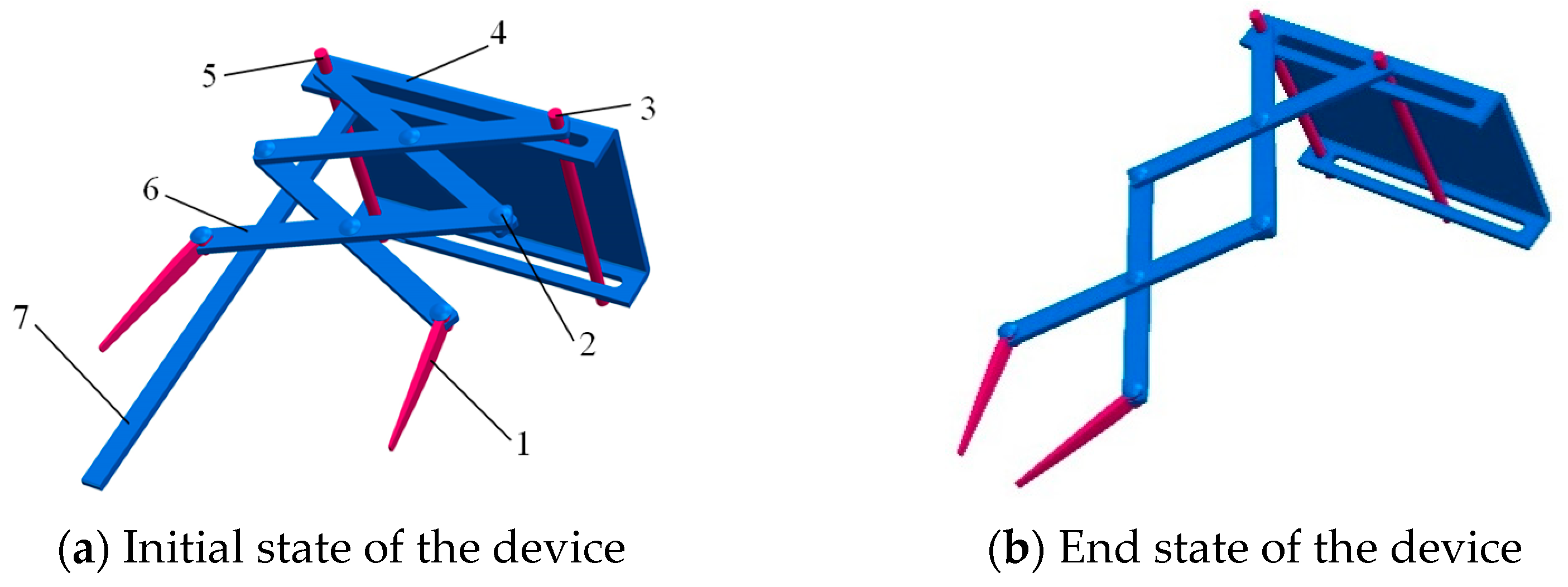
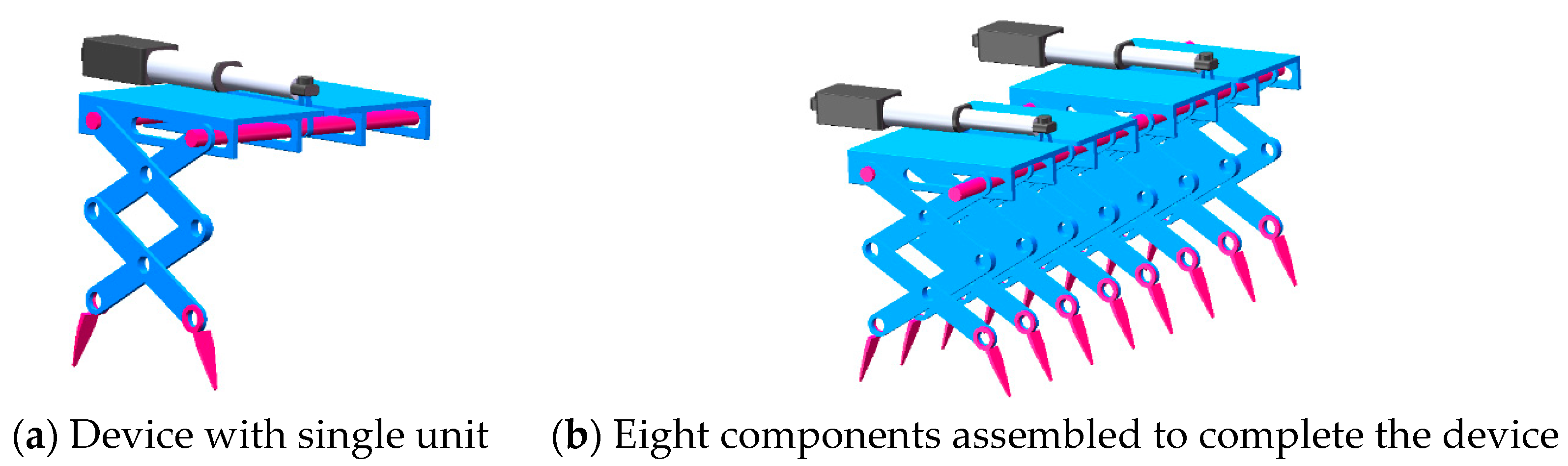
2. Device Structure and Working Principle
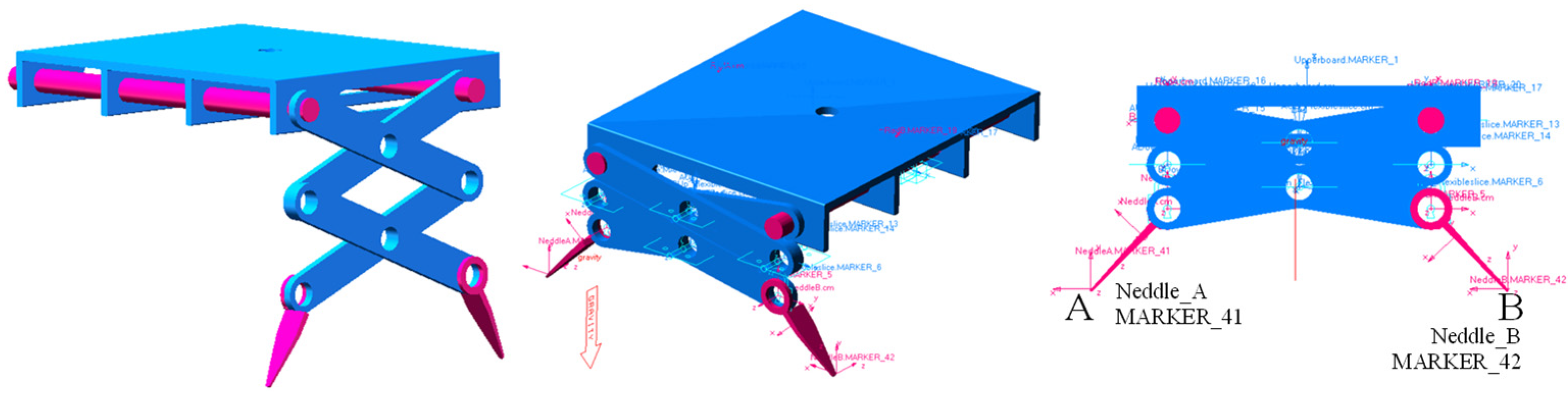
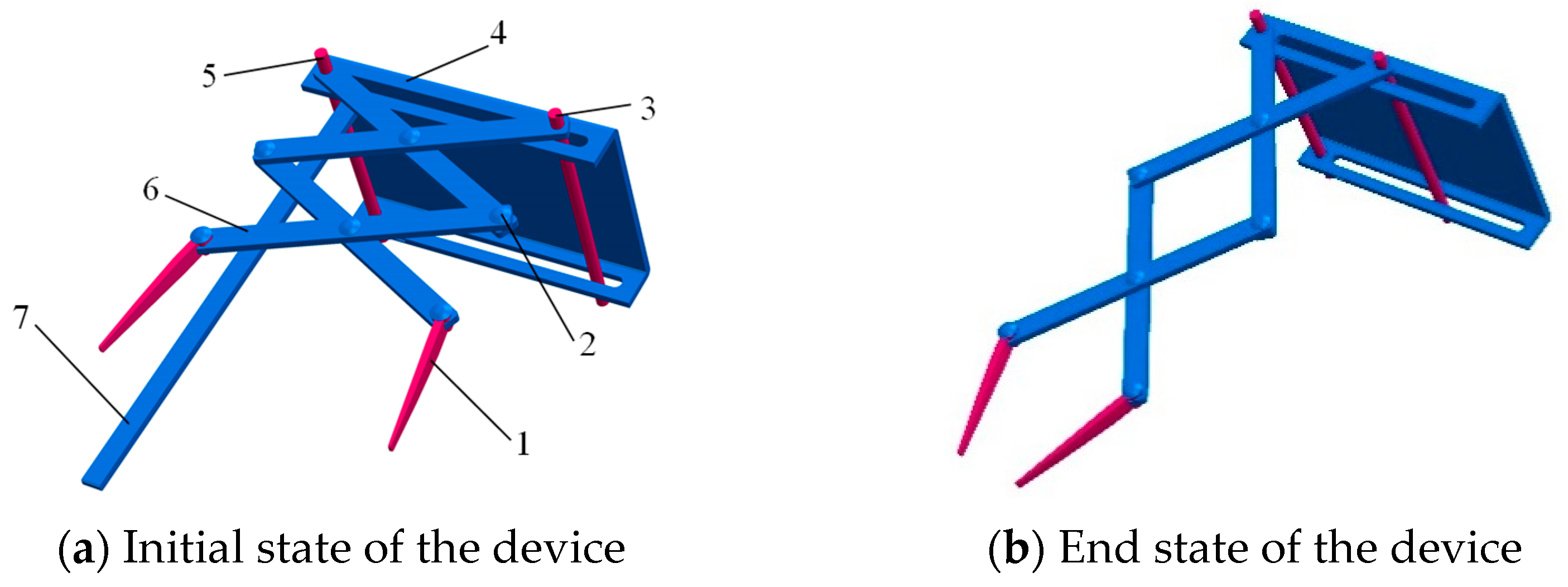
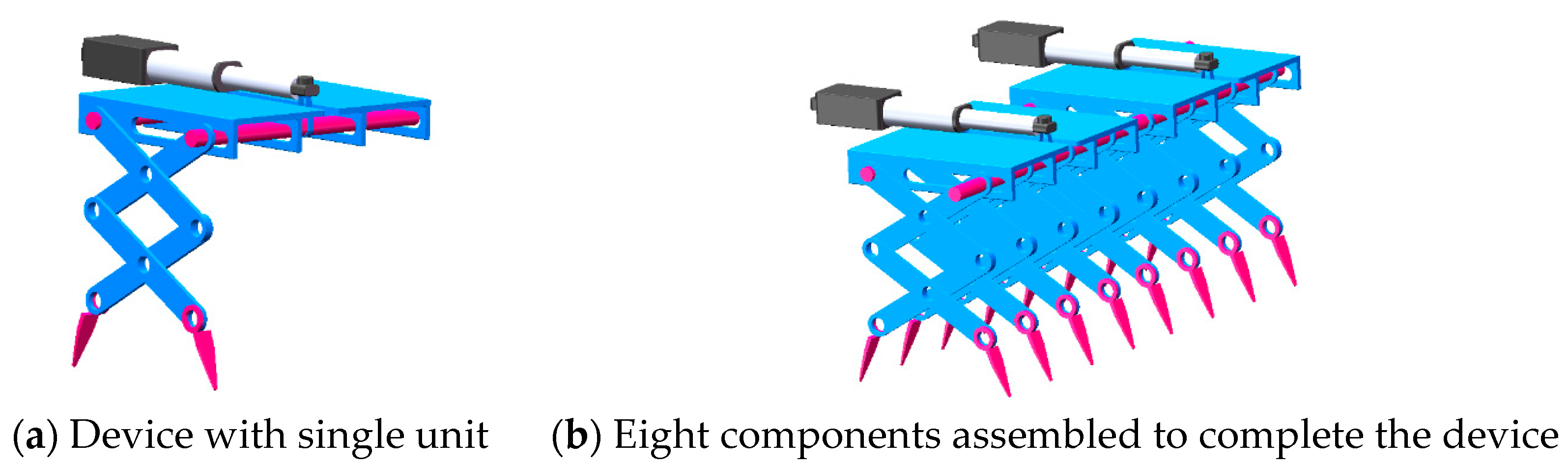
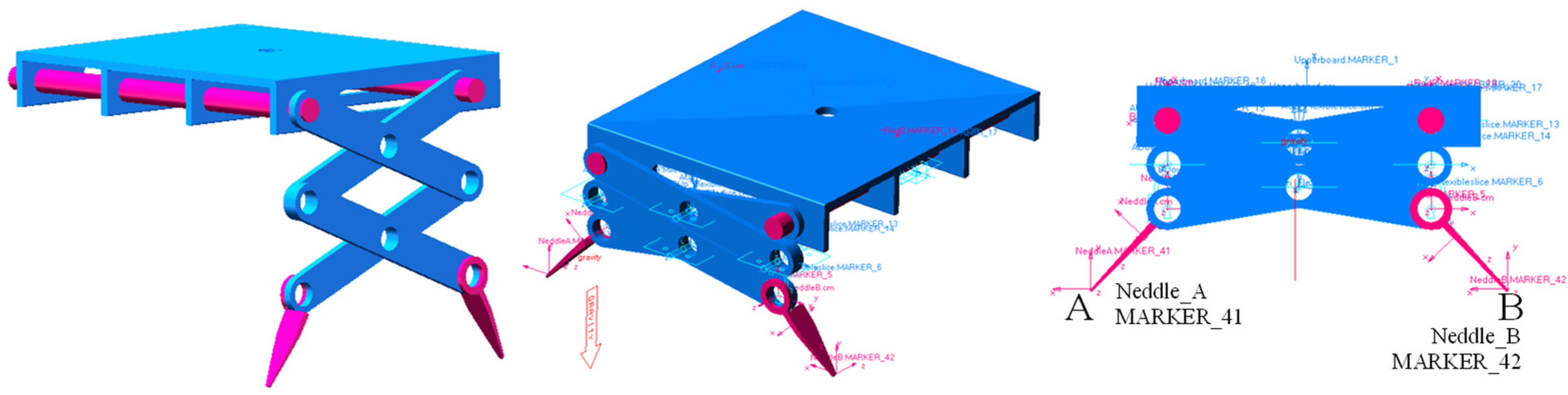
2.1. Structure of the Device
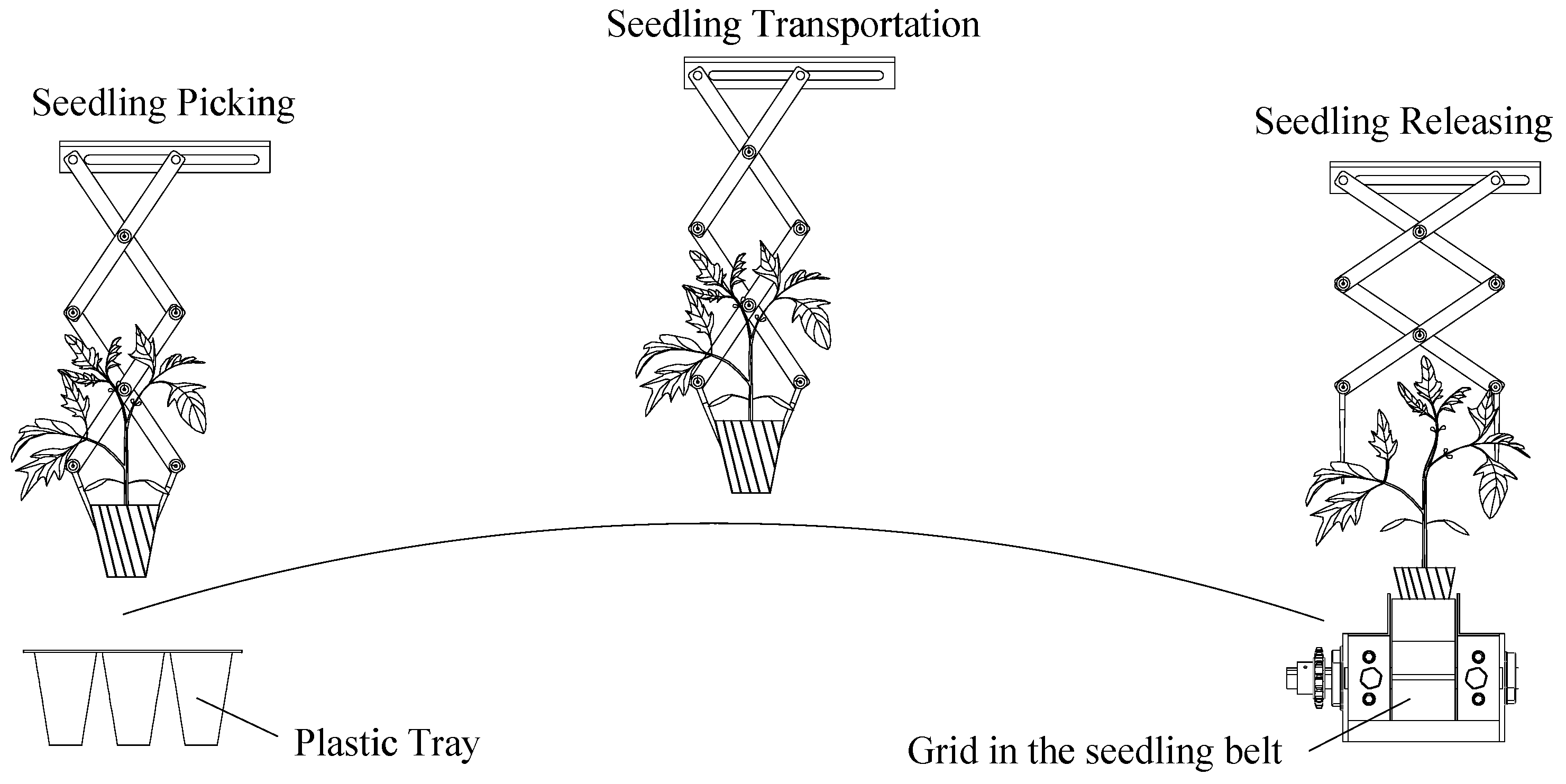
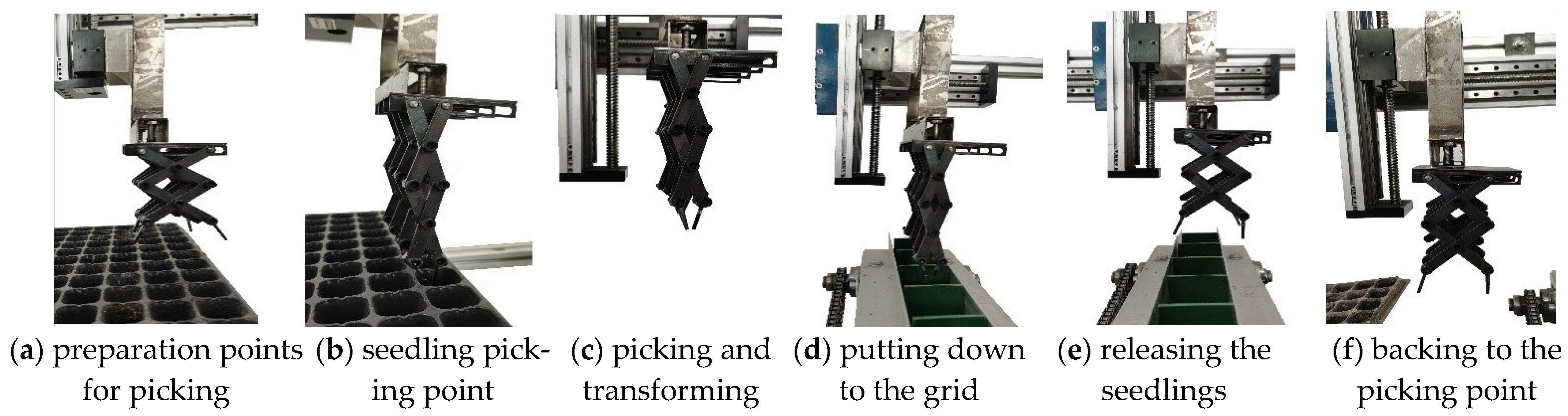
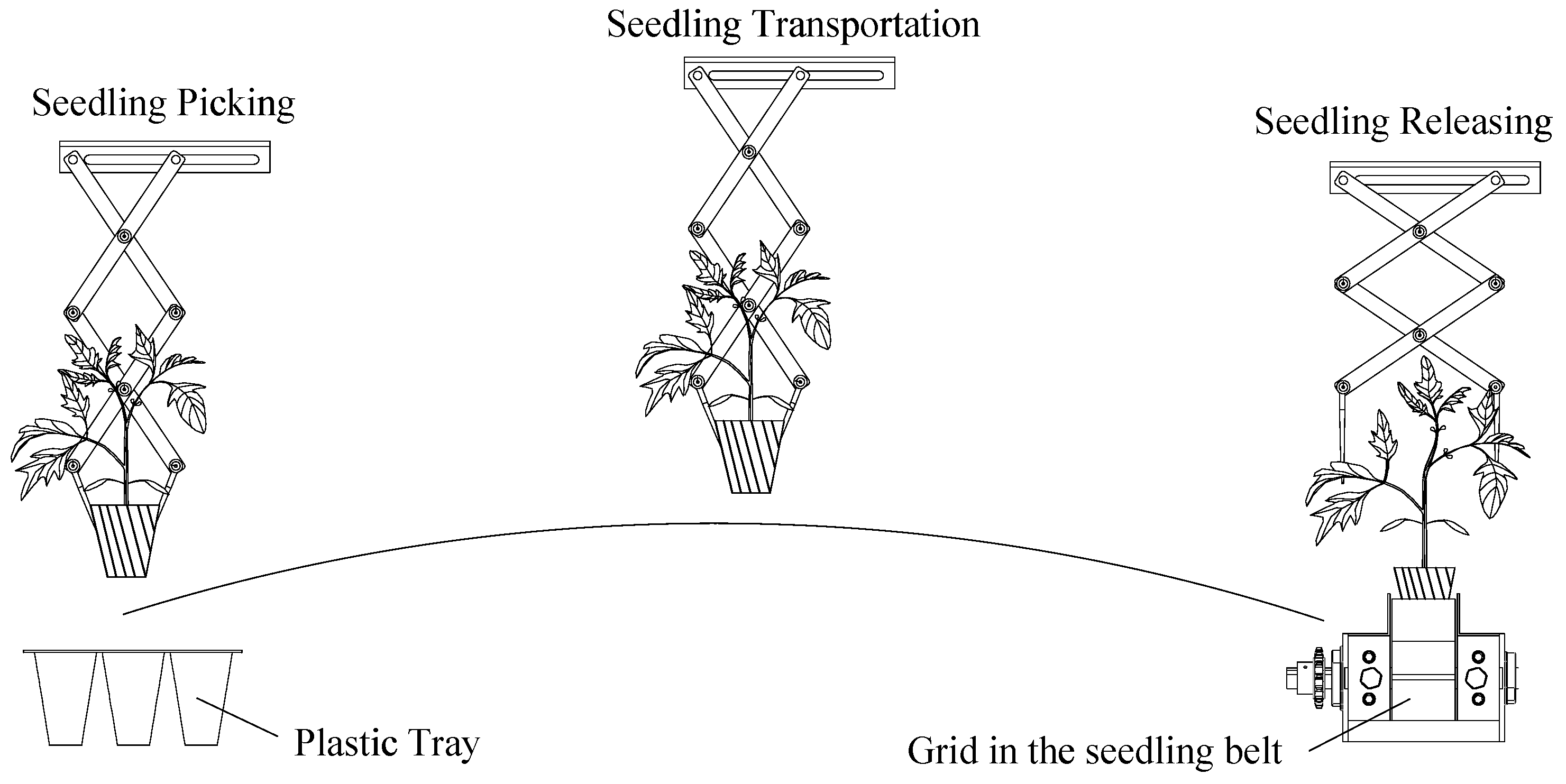
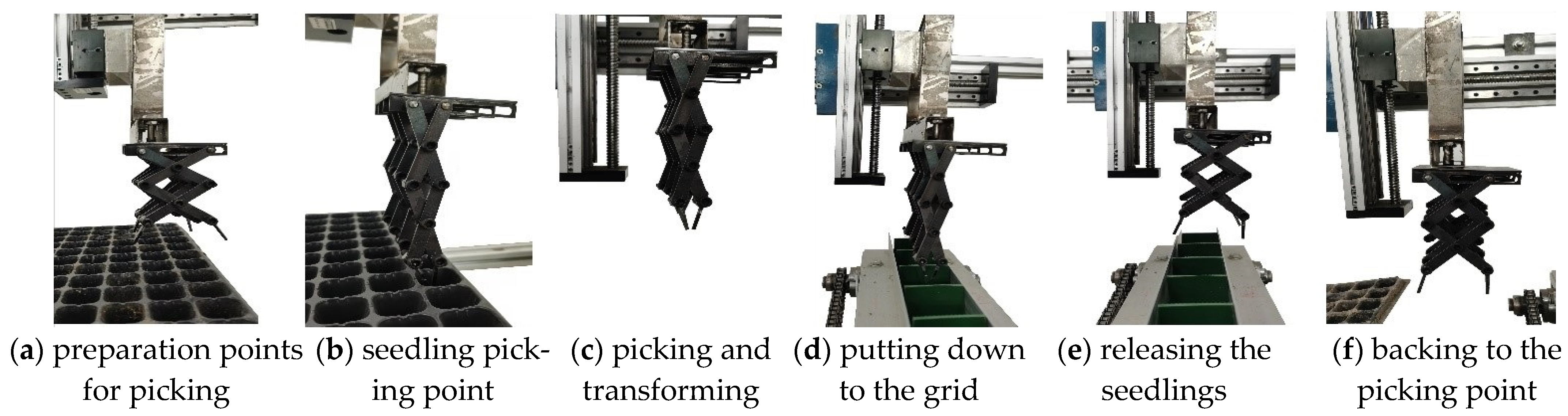
2.2. Working Principle
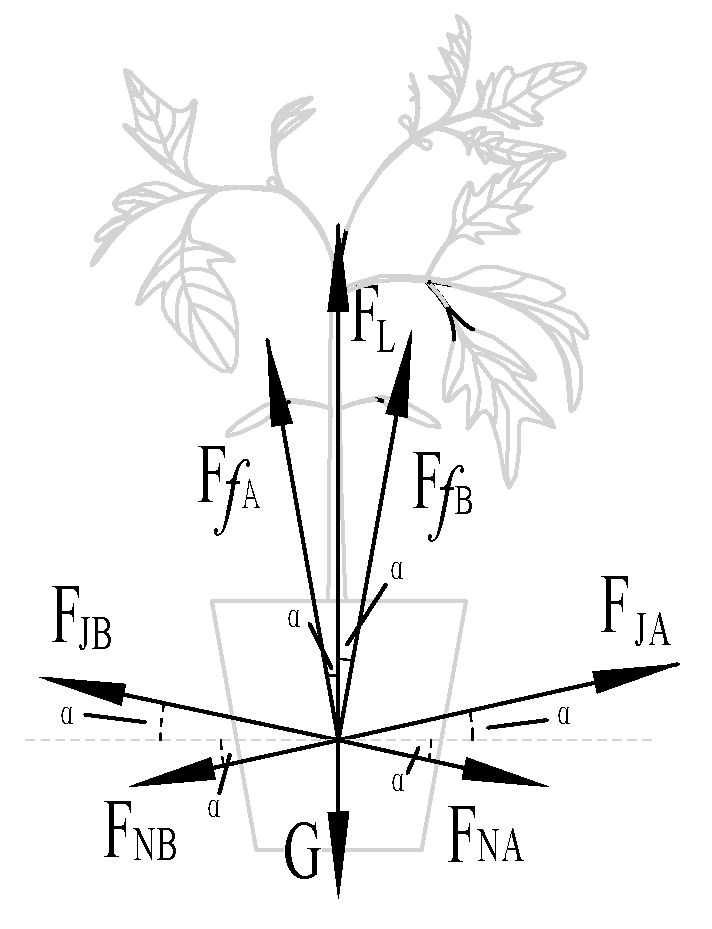
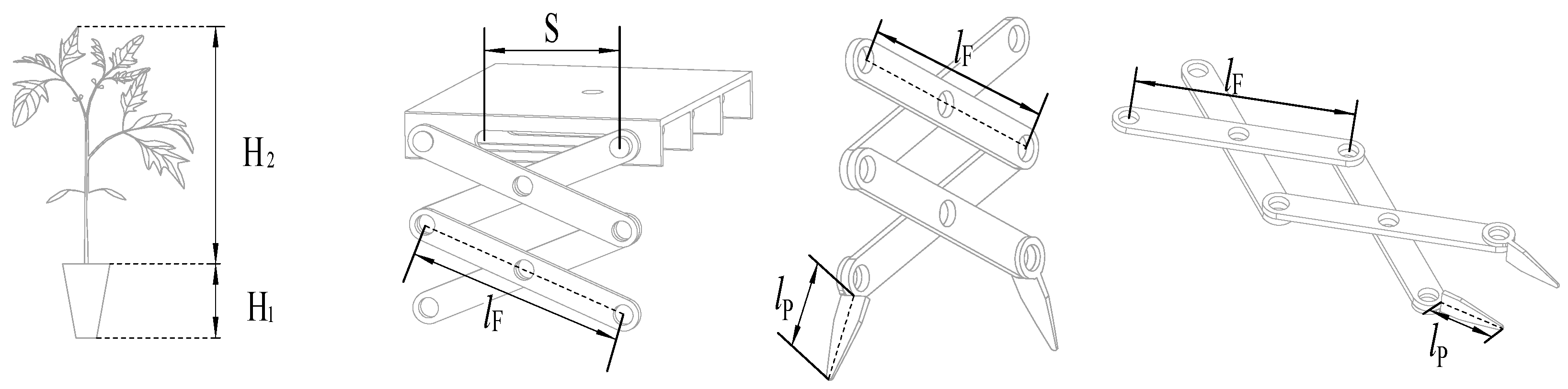
3. Seedling Picking Model
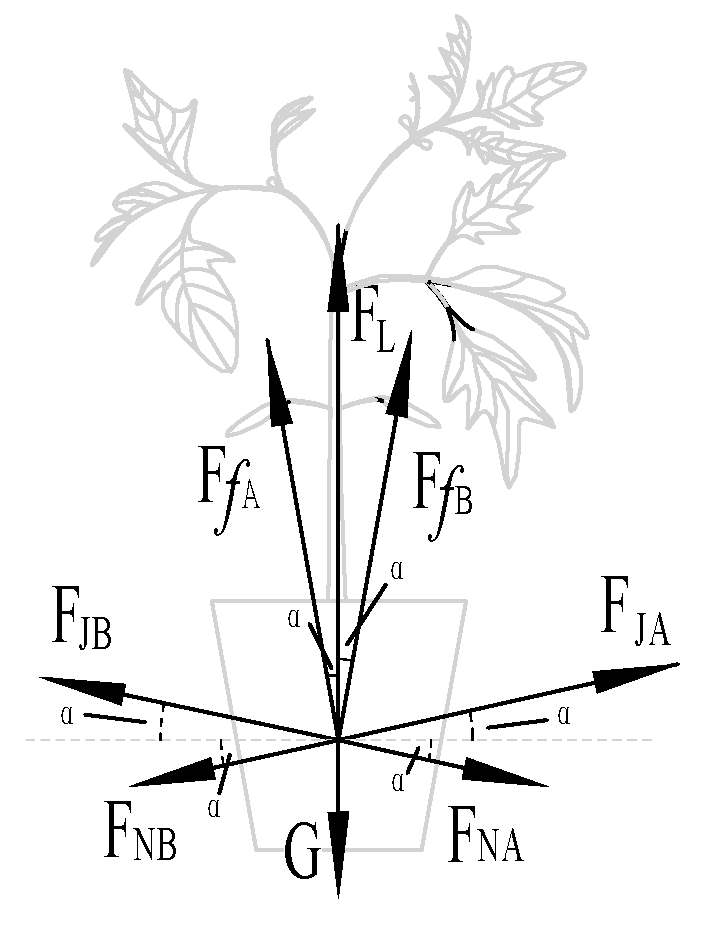
3.1. Force Analysis of the Seedlings
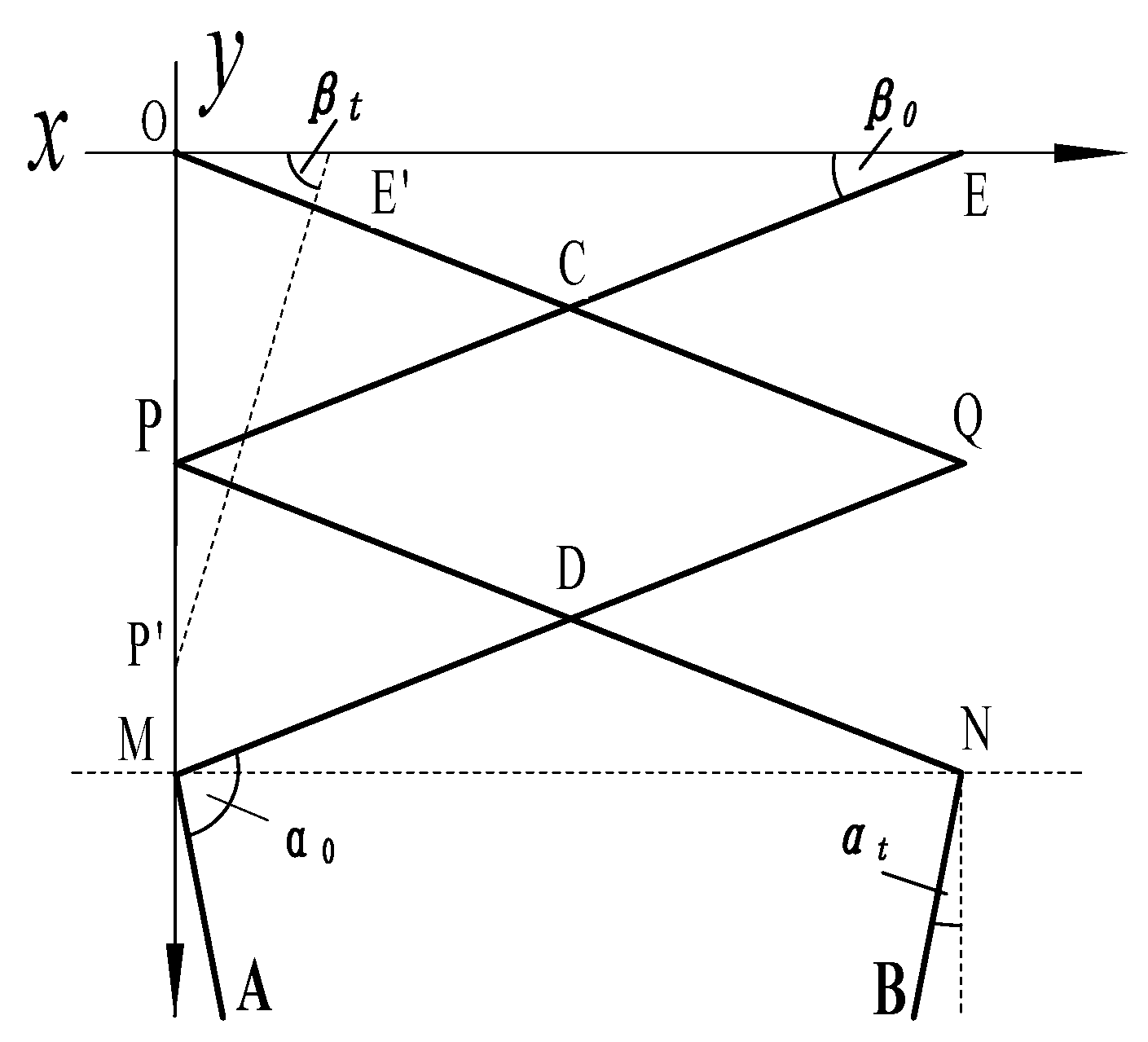
3.2. Device Motion Model
3.3. Evaluation Indicators
4. Component Design and Simulation
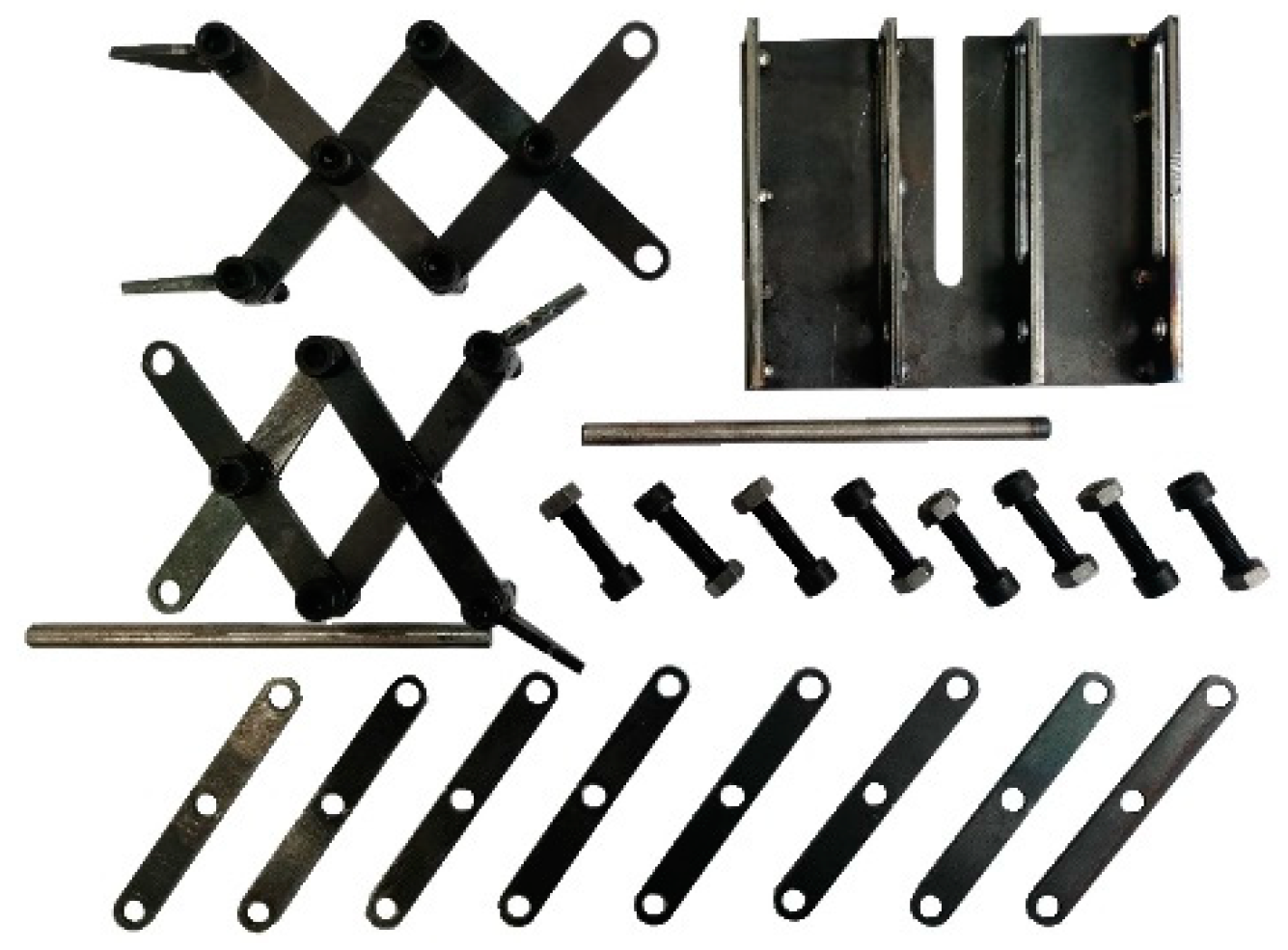
4.1. Component Design
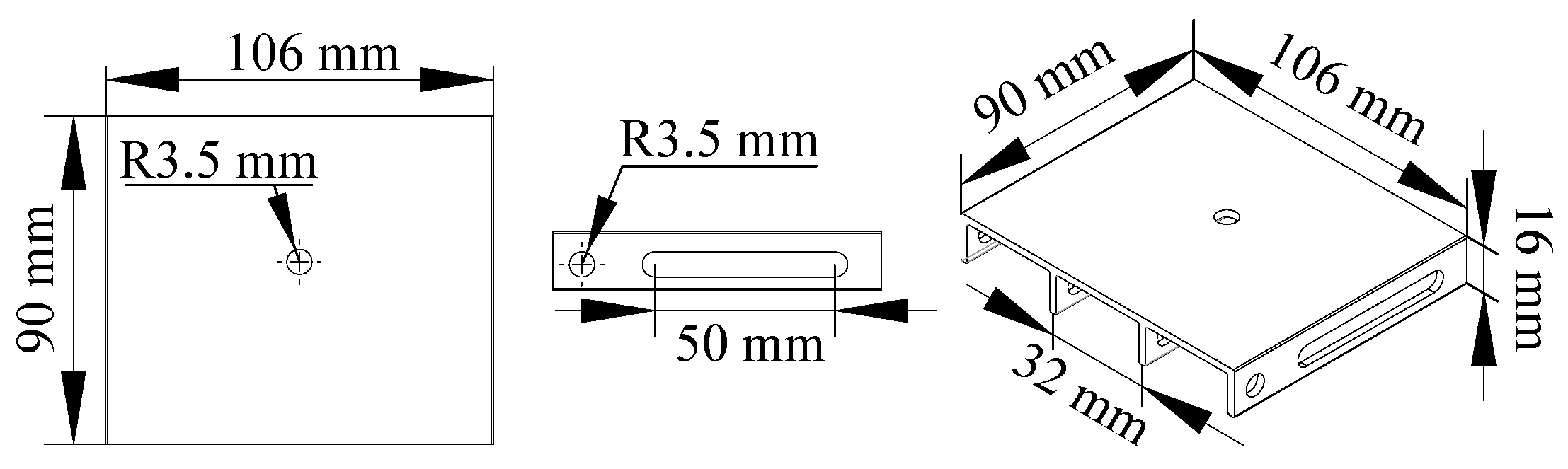
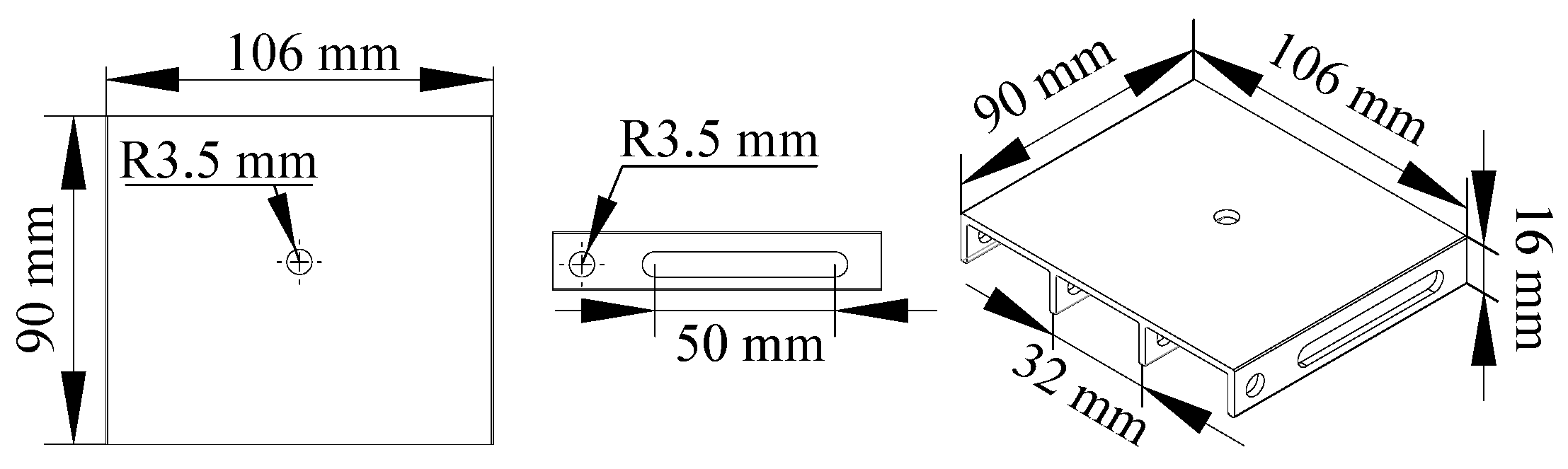
4.1.1. Upper Plate
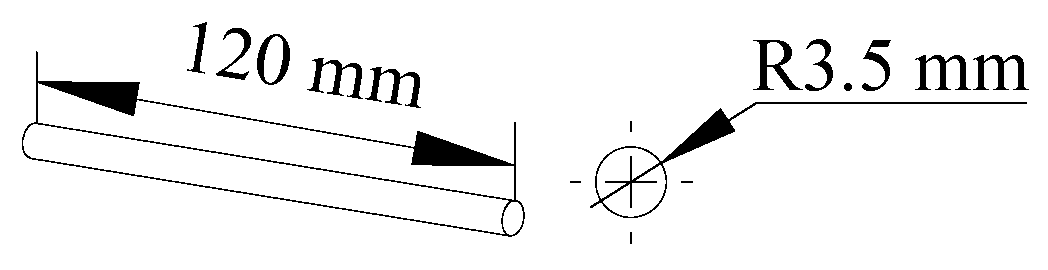
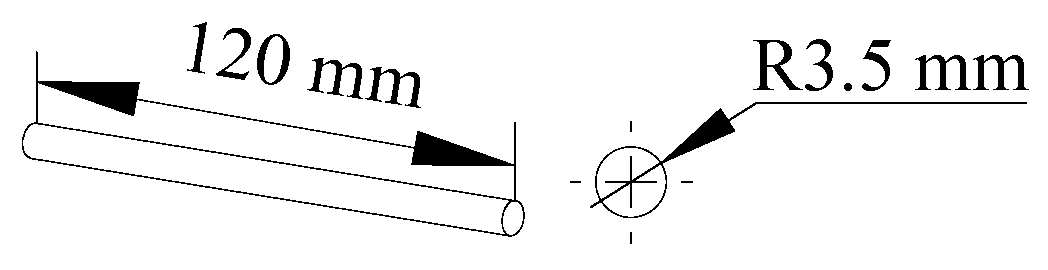
4.1.2. Push/Fixed Rod
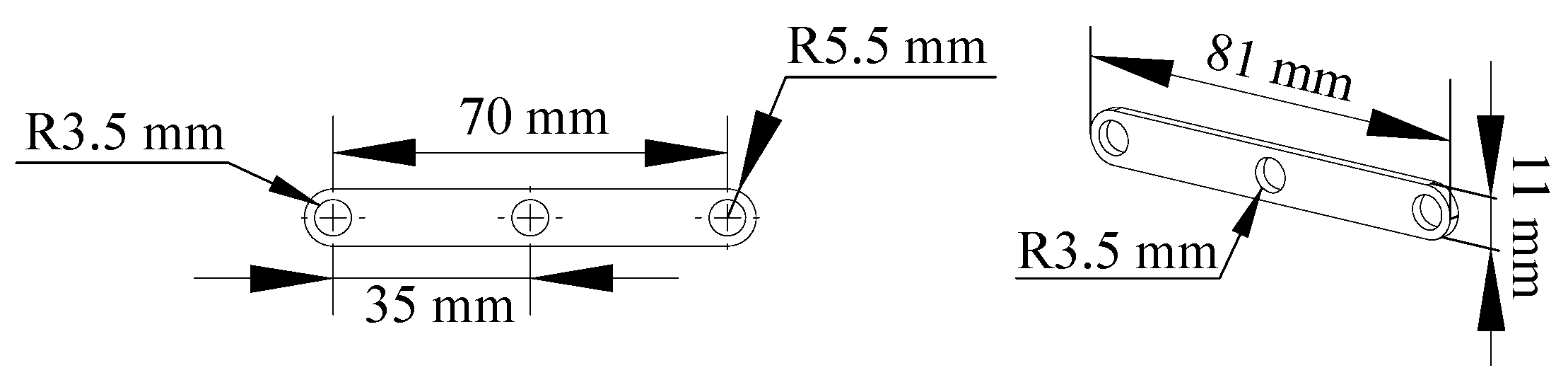
4.1.3. Stretchable Slices
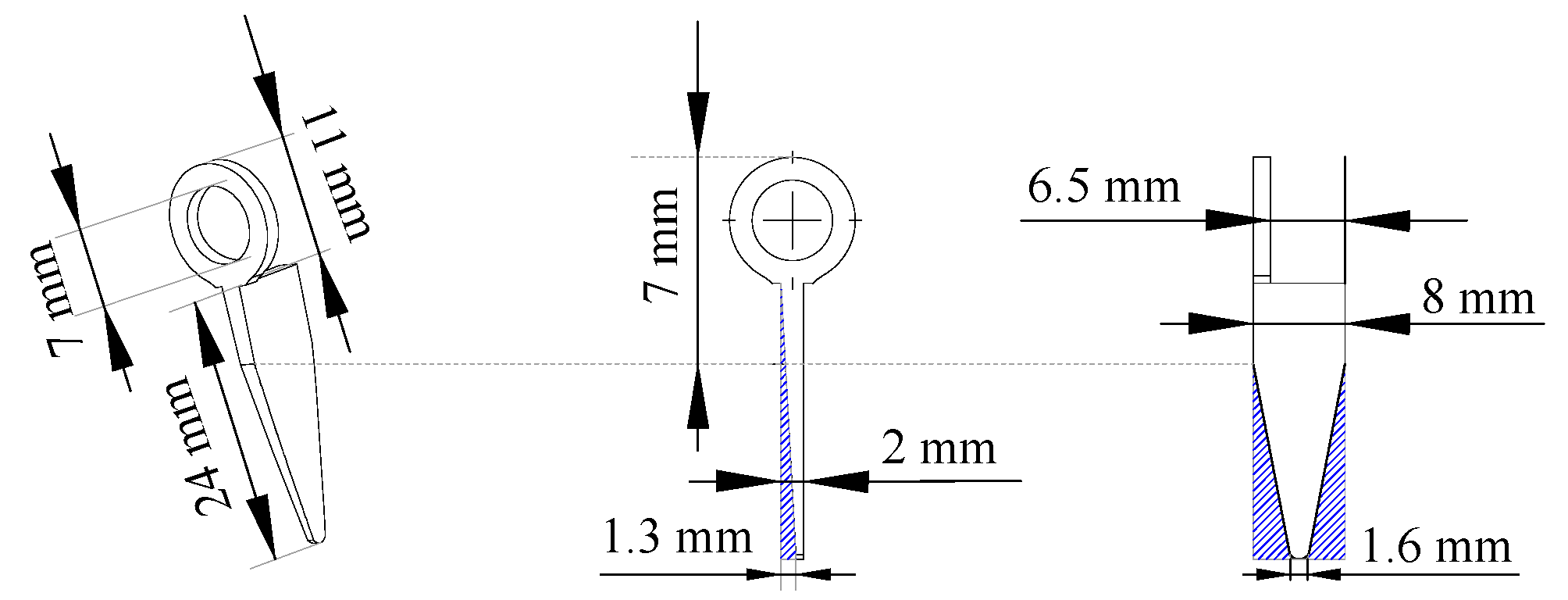
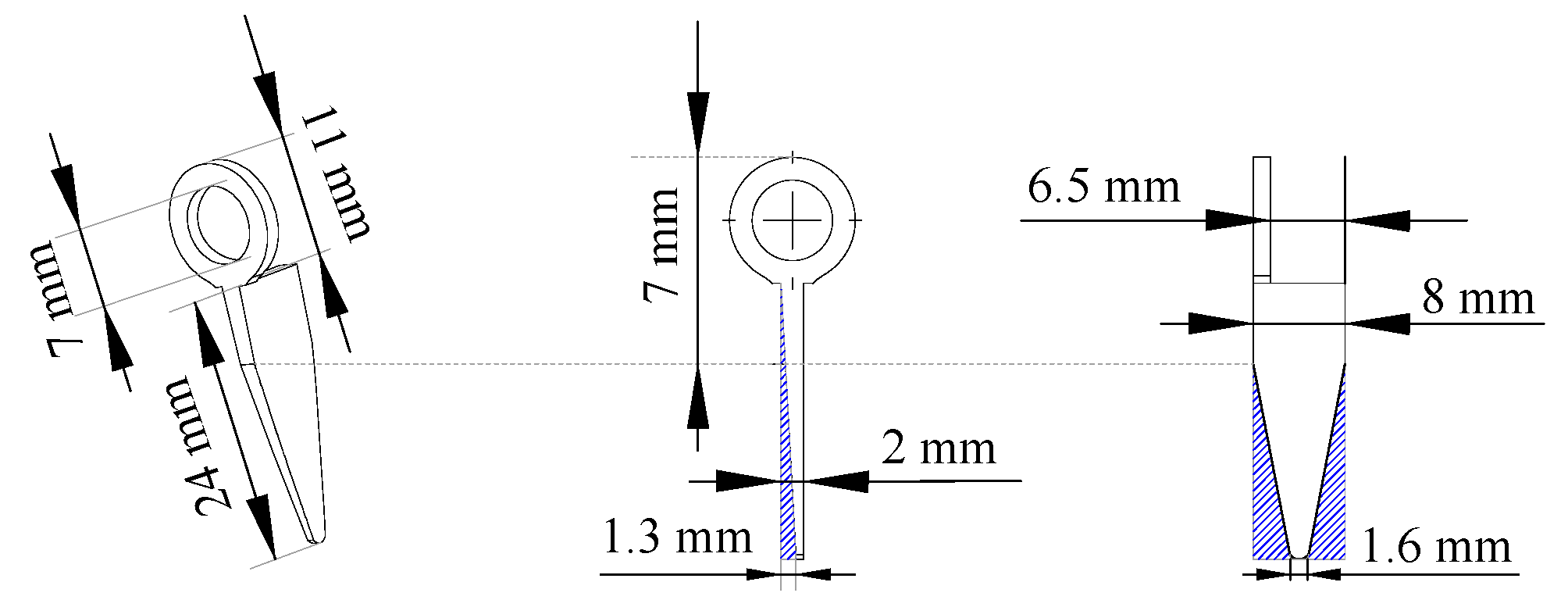
4.1.4. Picking Needle
4.2. Simulation and Optimization
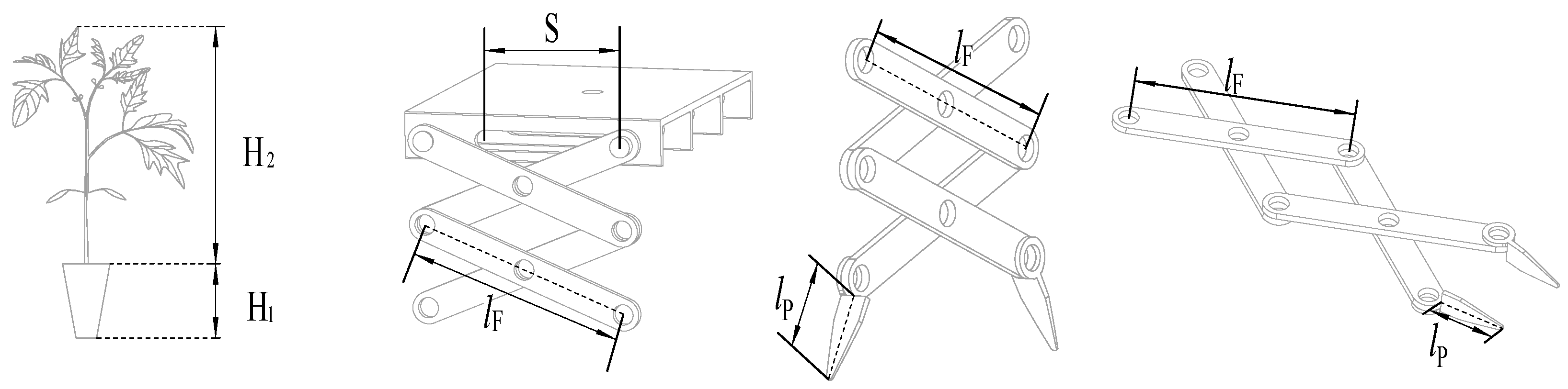
4.2.1. Push Rod Stroke S
4.2.2. Length of the Needle lP
4.2.3. Length of the Stretchable Slices lF
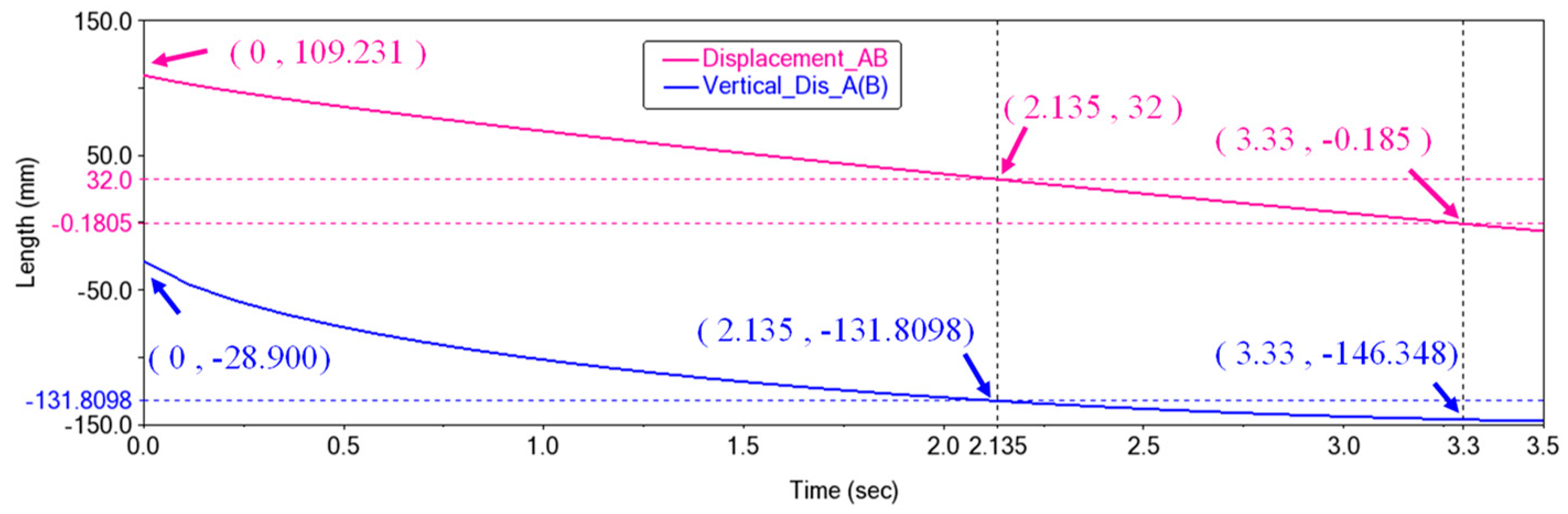
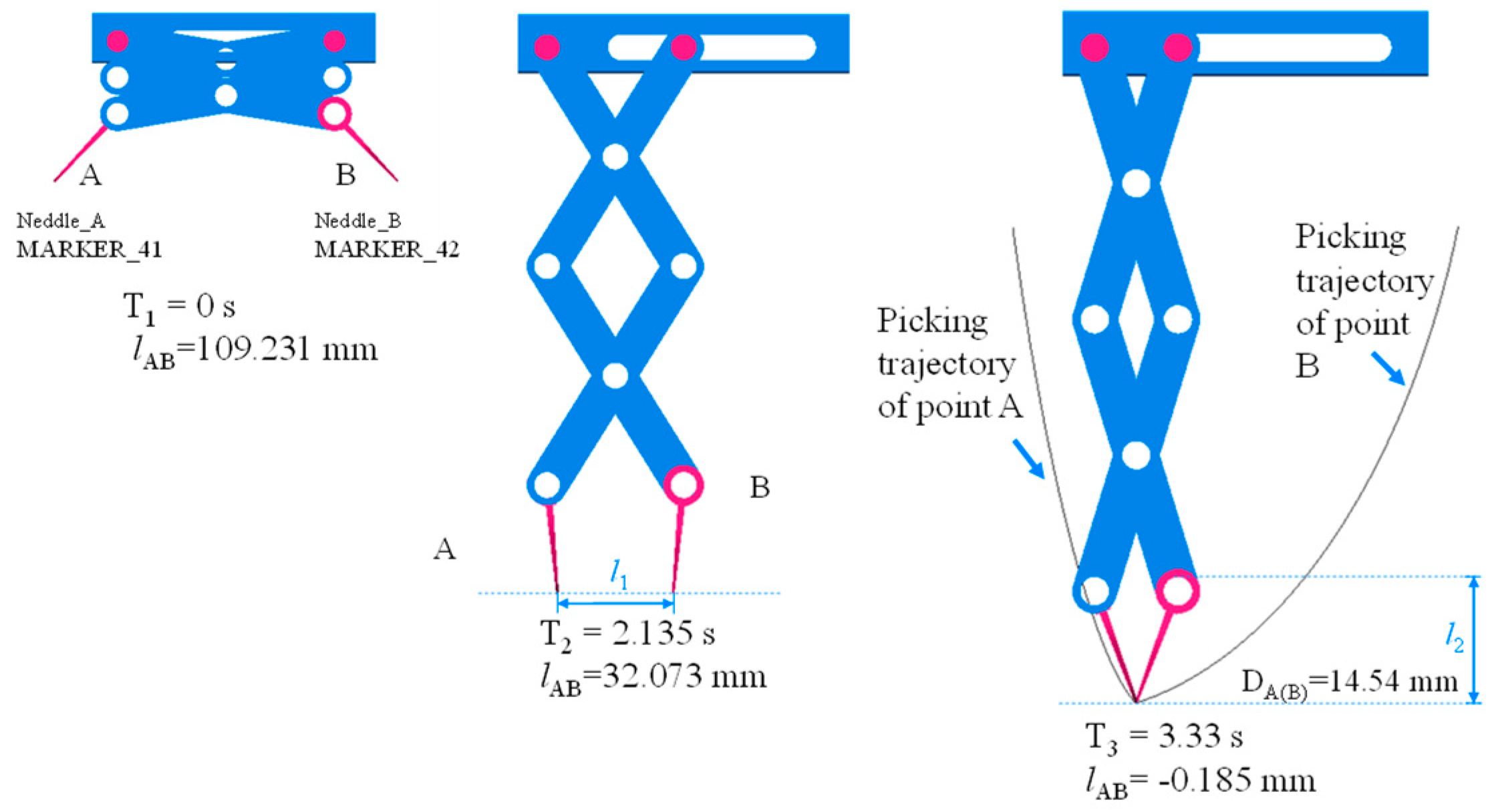
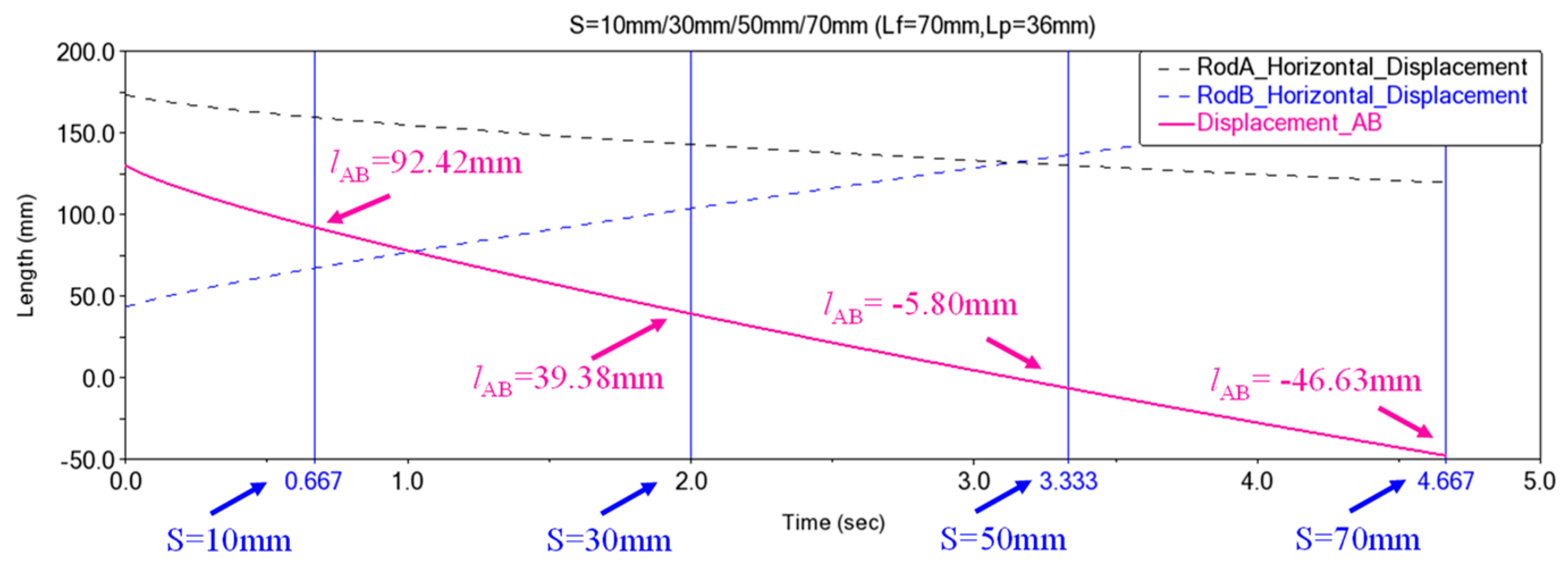
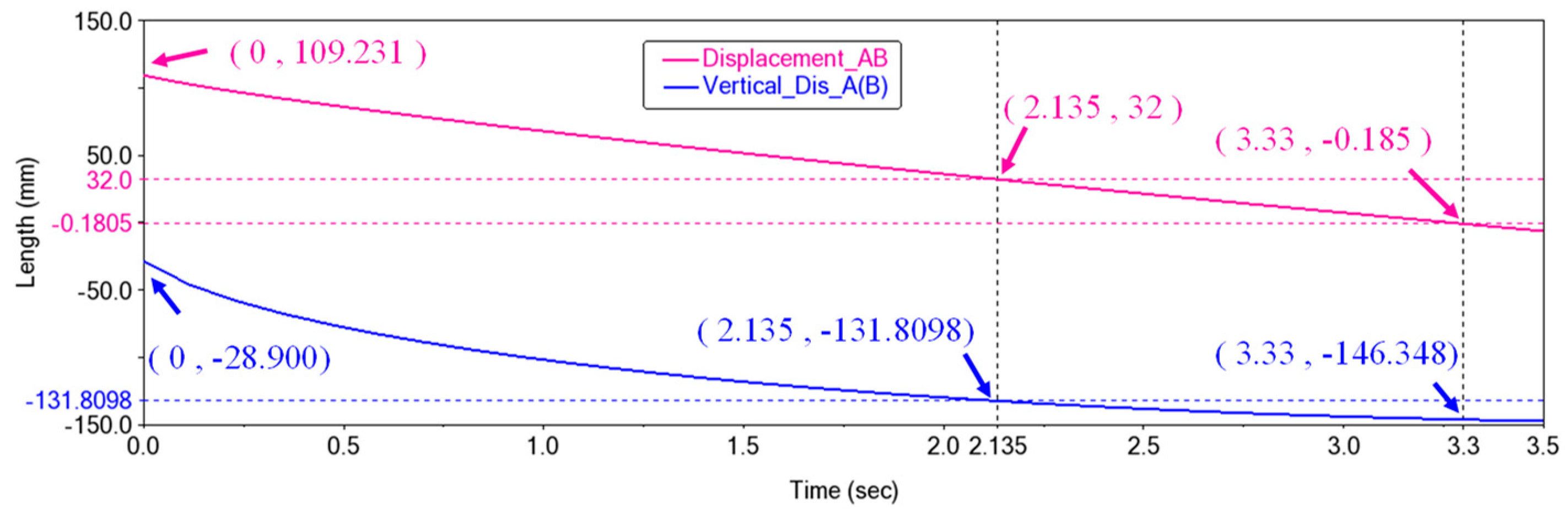
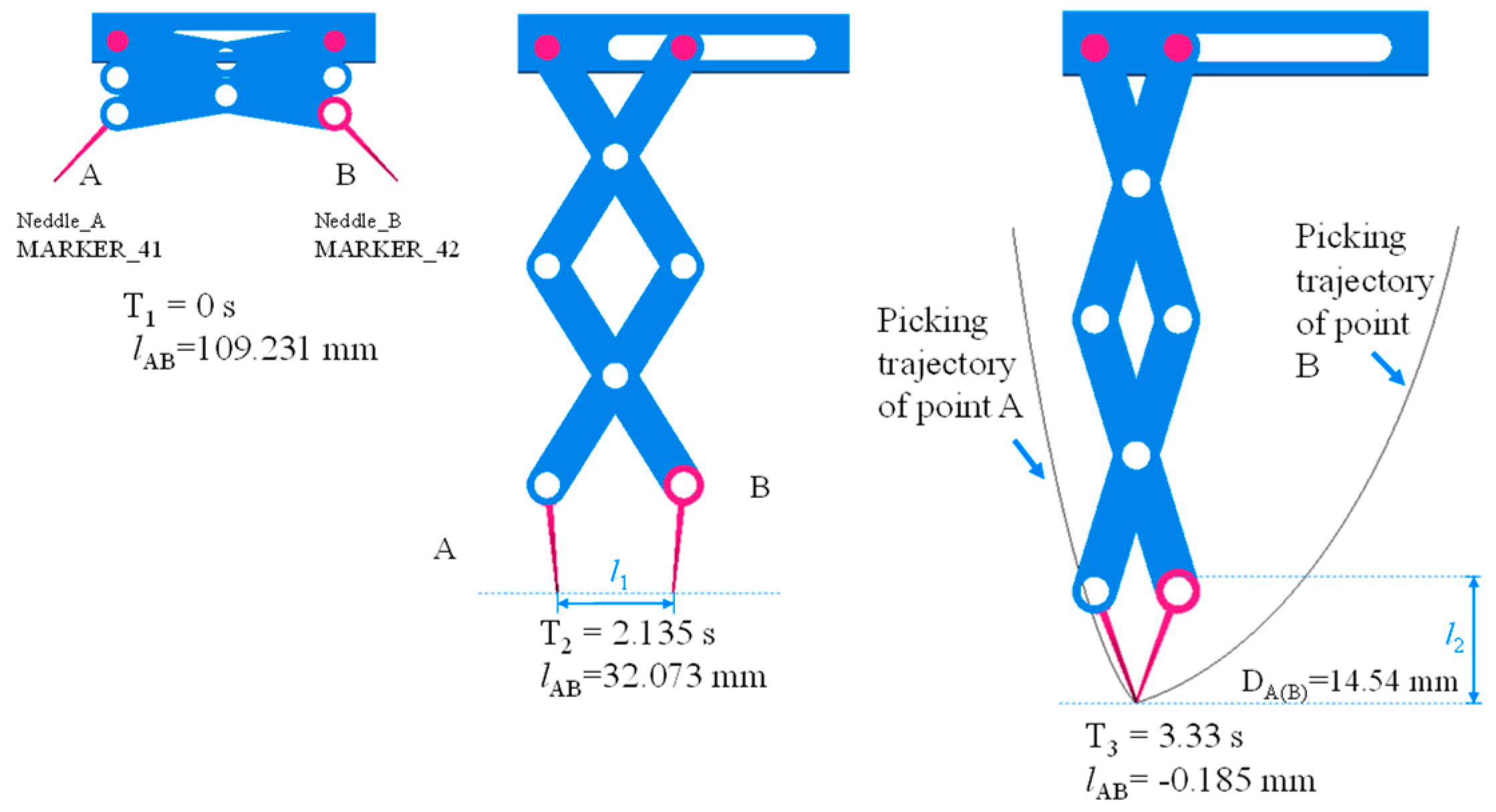
4.2.4. Displacement and Trajectory of Point A and B
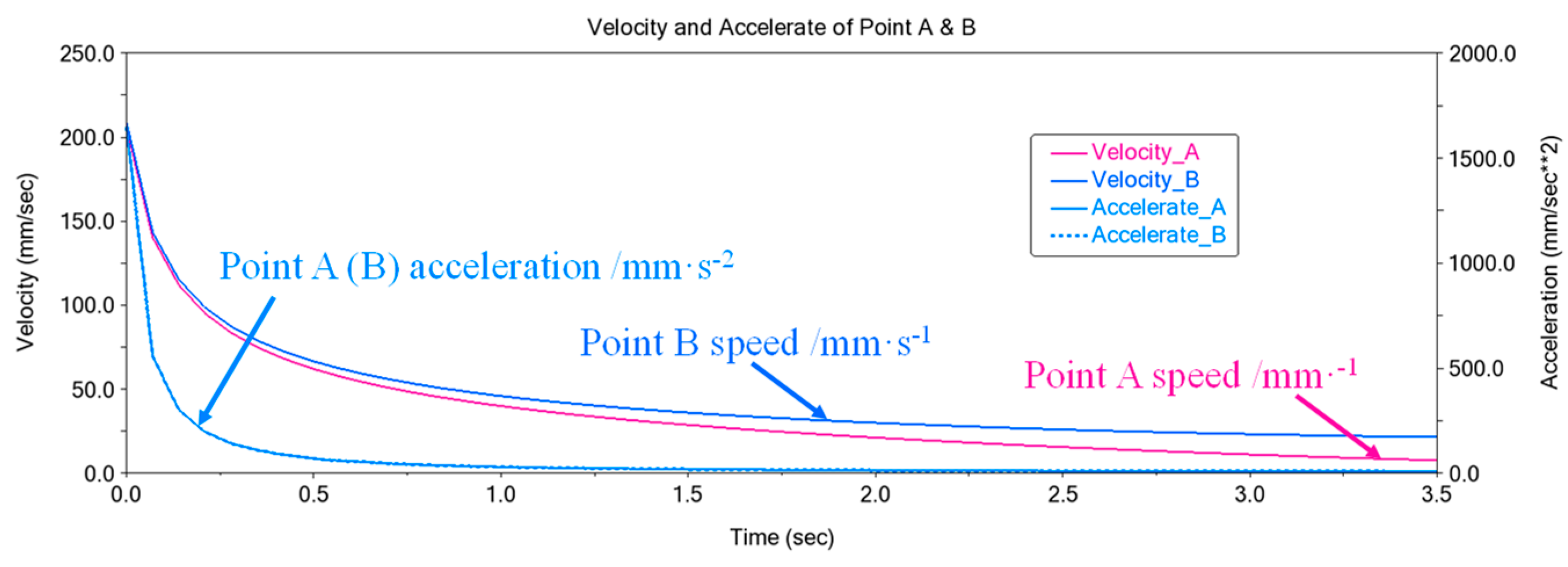
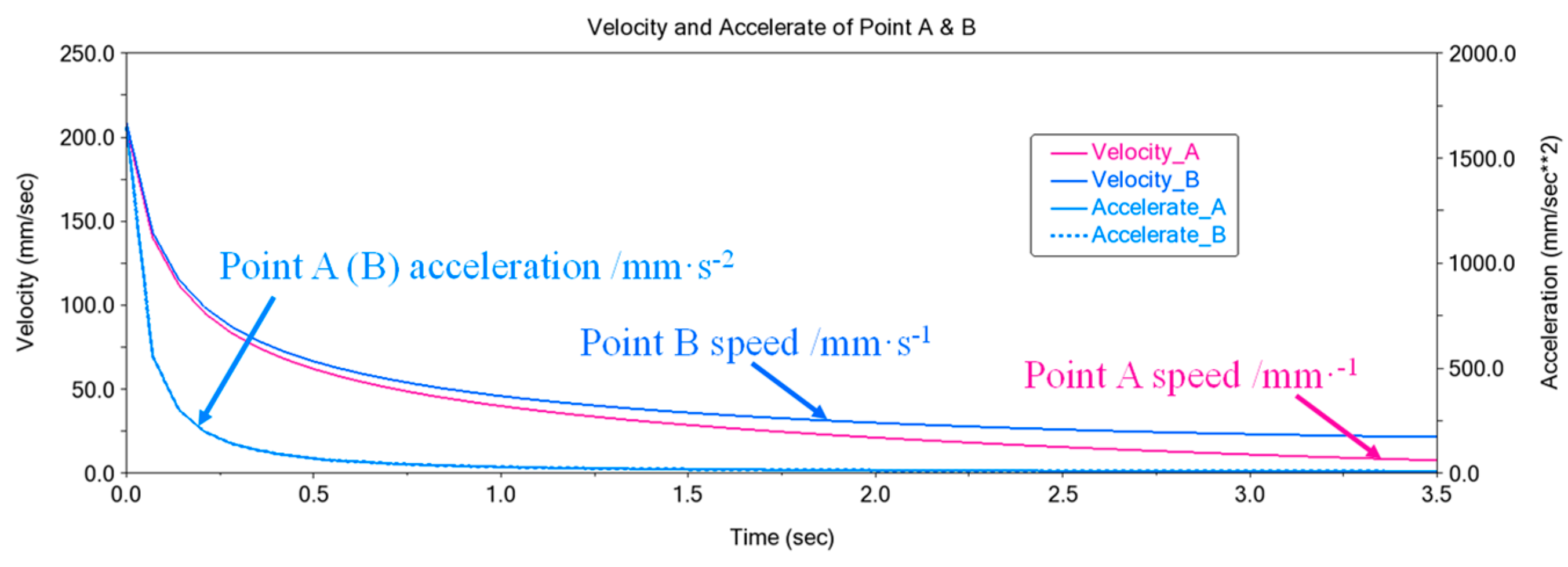
4.2.5. Running Speed and Acceleration
5. Test of the Seedling Pick-Up Device
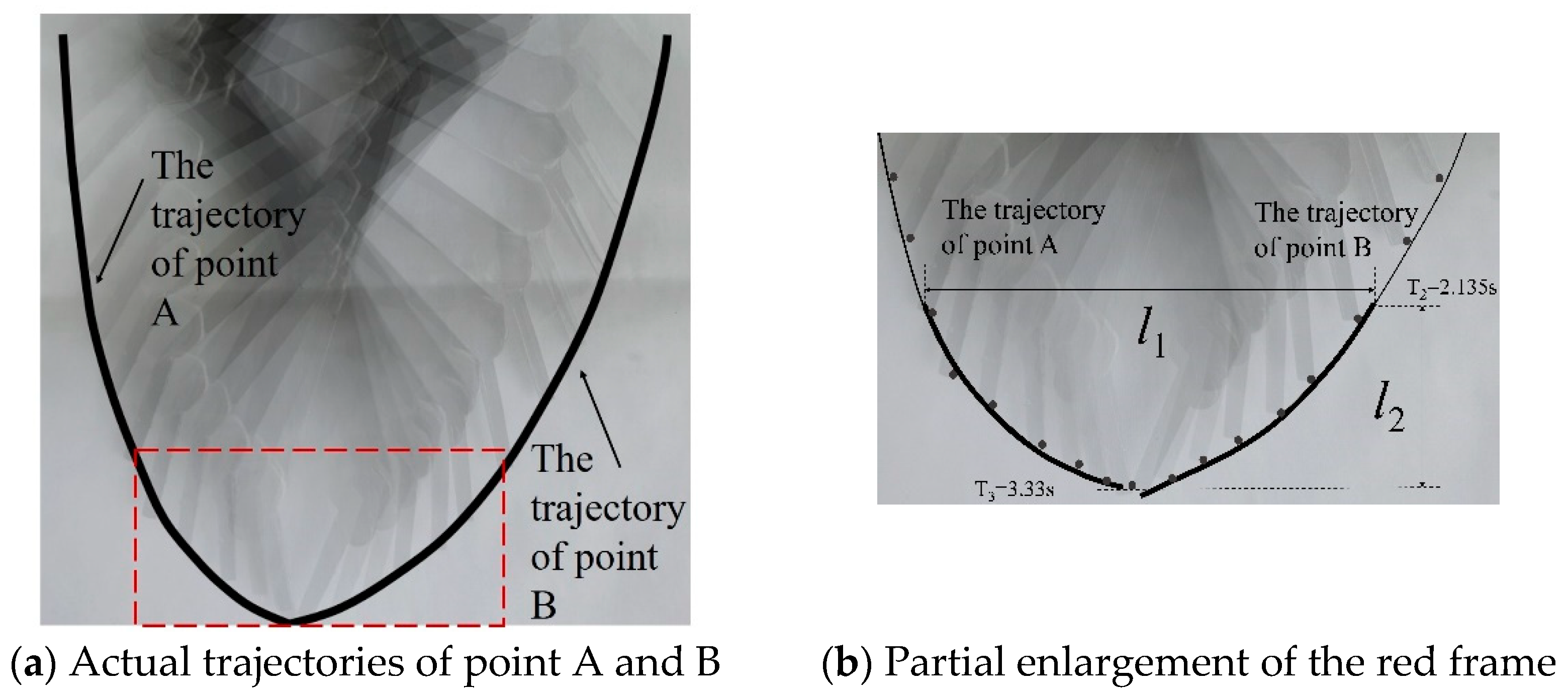
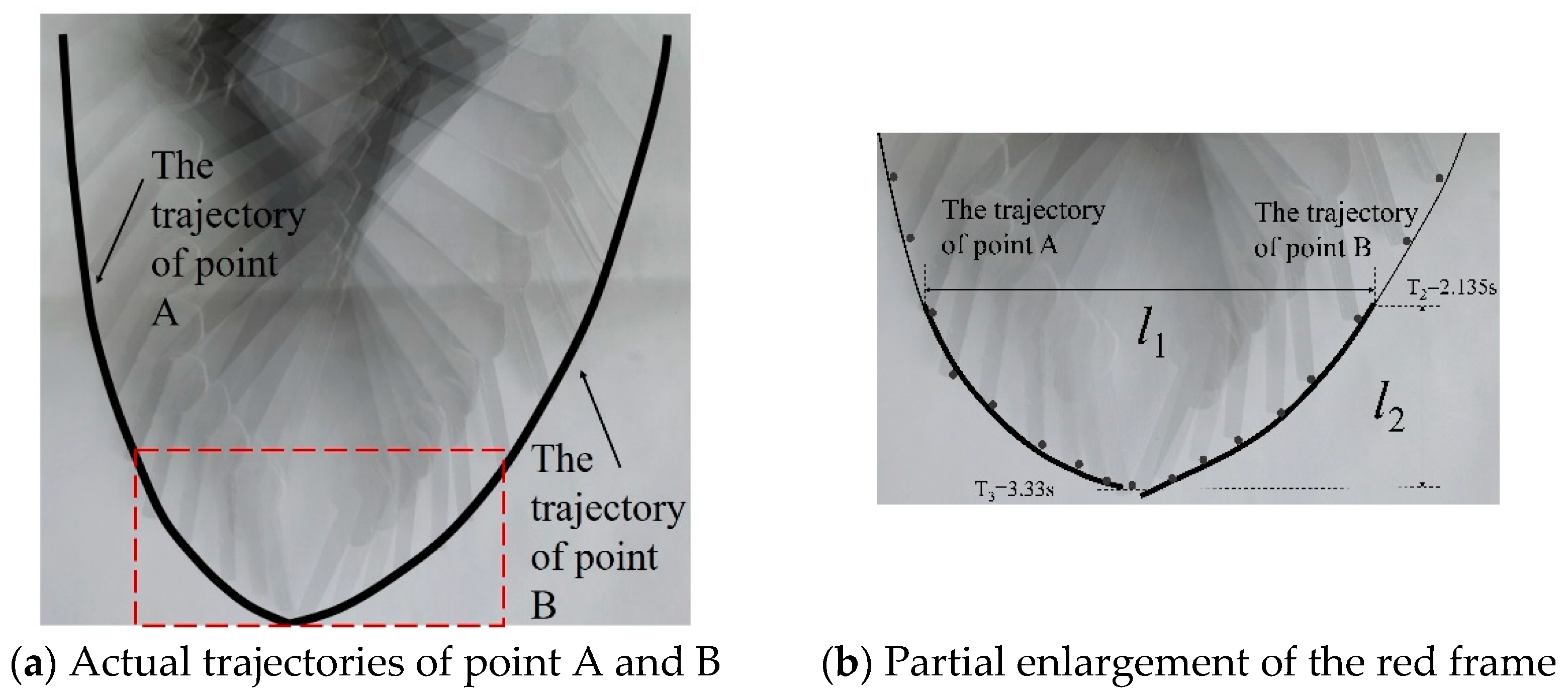
5.1. Trajectory Test
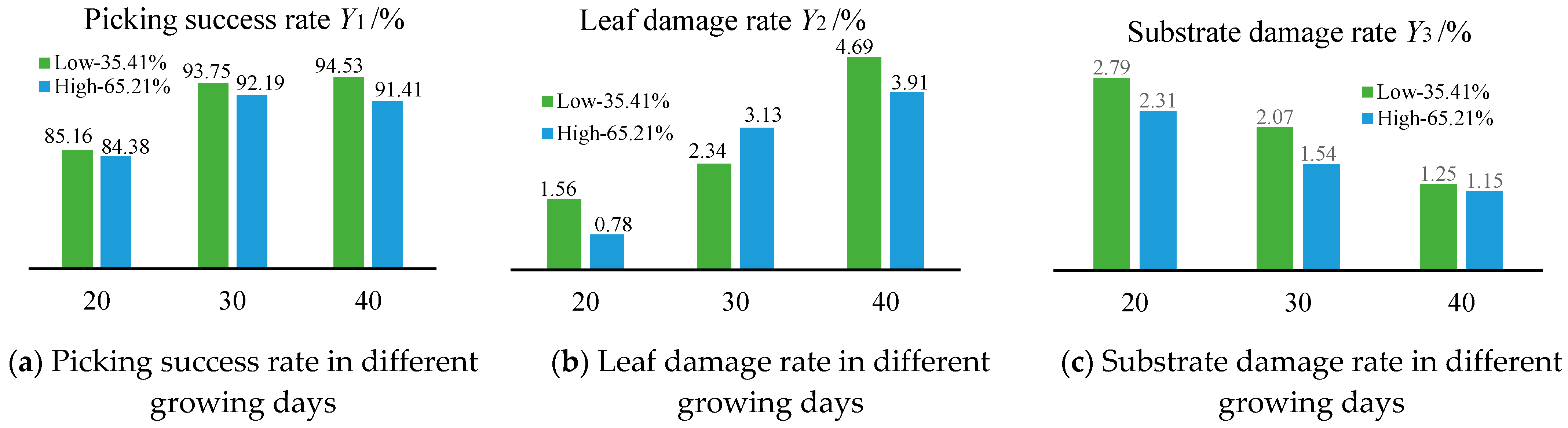
5.2. Seedling Picking Test
5.2.1. Evaluation Index
5.2.2. Test Design
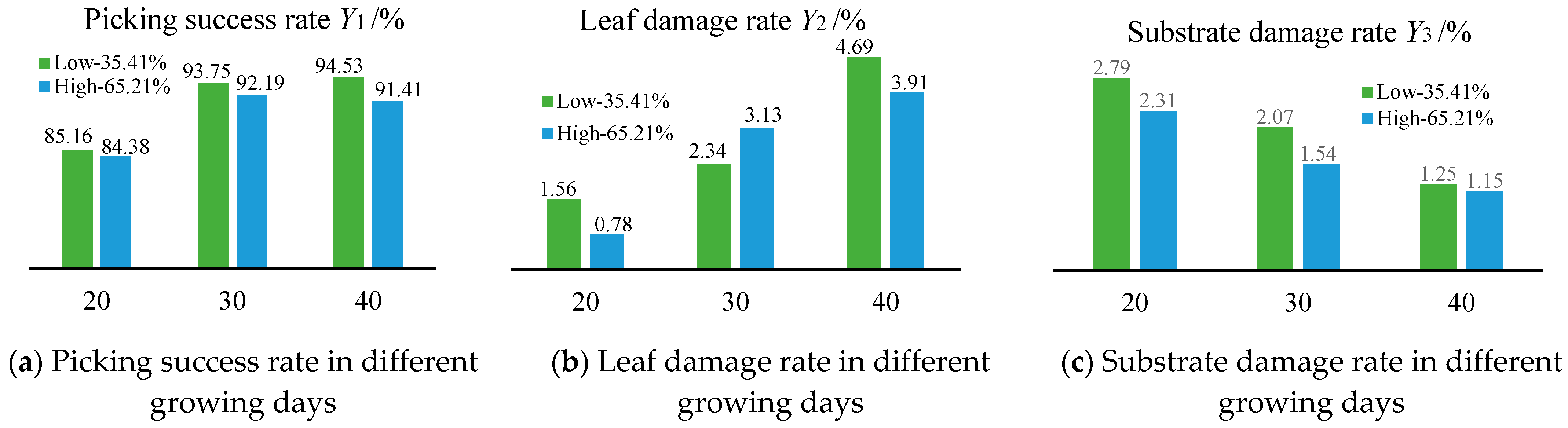
5.2.3. Analysis of Test Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, M.; Guan, Z.; Wu, F. An Overview of the US Tomato Industry; Florida Tomato Institute Program: Immokalee, FL, USA, 2013. [Google Scholar]
- Costa, J.M.; Heuvelink, E. The global tomato industry. In Tomatoes, 2nd ed.; CABI: Boston, MA, USA, 2018; pp. 1–26. [Google Scholar]
- Zhao, D.; Wang, Z. Improving Yield and Quality of Processing Tomato (Lycopersicon esculentum Miller) Using Alternate Partial Root-Zone Drip Irrigation in Arid Northwest China. Water 2019, 11, 1503. [Google Scholar] [CrossRef] [Green Version]
- Kumar, G.P.; Raheman, H. Vegetable transplanters for use in developing countries—A review. Int. J. Veg. Sci. 2008, 14, 232–255. [Google Scholar] [CrossRef]
- Choi, W.C.; Kim, D.C.; Ryu, I.H.; Kim, K.U. Development of a seedling pick–up device for vegetable transplanters. Trans. ASAE 2002, 45, 13. [Google Scholar]
- Ji, J.; Cheng, Q.; Jin, X.; Zhang, Z.; Xie, X.; Li, M. Design and test of 2ZLX-2 transplanting machine for oil peony. Int. J. Agric. Biol. Eng. 2020, 13, 61–69. [Google Scholar] [CrossRef]
- Han, L.; Mao, H.; Hu, J.; Tian, K. Development of a doorframe-typed swinging seedling pick-up device for automatic field transplantation. Span. J. Agric. Res. 2015, 13, 13. [Google Scholar] [CrossRef] [Green Version]
- Yung, I.; Maccarana, Y.; Maroni, G.; Previdi, F. Partially structured robotic picking for automation of tomato transplantation. In Proceedings of the 2019 IEEE International Conference on Mechatronics, Ilmenau, Germany, 18–20 March 2019. [Google Scholar]
- Yin, D.; Wang, J.; Zhou, M. Optimal Design and Experiment of Vegetable Potted Seedlings Pick-up Mechanism for Exploring and Picking-Pushing Plugs. Trans. Chin. Soc. Agric. Mach. 2019, 50, 64–71. [Google Scholar]
- Ye, B.; Tang, T.; Yu, G. Dynamic analysis of rotary seedling pick-up mechanism of vegetable transplanting machine with counterweight. Trans. Chin. Soc. Agric. Mach. 2019, 50, 117–122. [Google Scholar]
- Wang, L.; Sun, L.; Xu, Y. Design Method of Transplanting Mechanism of Planetary Gear Train Based on Spatial Trajectory. Trans. Chin. Soc. Agric. Mach. 2021, 52, 51–59. [Google Scholar]
- Jiang, Z.; Jiang, H.; Tong, J. Optimal design of end-effector on automatic plug seedling transplanter. J. Zhejiang Univ. 2017, 51, 1119–1125. [Google Scholar]
- Han, B.; Shen, D.; Guo, C. Design and Experiment of Adjustable End-effector of Cabbage Seedlings. Trans. Chin. Soc. Agric. Mach. 2019, 50, 111–120. [Google Scholar]
- Xie, S.; Yang, S.; Liu, J. Development of the seedling taking and throwing device with oblique insertion and plug clipping for vegetable transplanters. Trans. Chin. Soc. Agric. Eng. 2020, 36, 1–10. [Google Scholar]
- Wang, C.; Liu, C.; Li, Y. Design and Experiment of Pneumatic Punching High-speed Seedling Picking Device for Vegetable Transplanter. Trans. Chin. Soc. Agric. Mach. 2021, 52, 35–43. [Google Scholar]
- Mao, H.; Han, L.; Zhao, H. Design of root lump loosening mechanism using air jets to eject vegetable plug seedlings. Trans. Chin. Soc. Agric. Eng. 2019, 35, 37–45. [Google Scholar]
- Yuan, T.; Wang, D.; Wen, Y. Design and experiment of seedlings unloading mechanism based on methods of air-blowing and vibration for vegetable transplanter. Trans. Chin. Soc. Agric. Mach. 2019, 50, 80–87. [Google Scholar]
- Jin, X. Research on Automatic Transplanting Technology and Device for Vegetable Plug Seedling; China Agriculture University: Beijing, China, 2014. [Google Scholar]
- Zhang, W. The Design and Optimization of Transplanting End-Effector on TRIZ; Nanjing Agricultural University: Nanjing, China, 2015. [Google Scholar]
- Wang, M. Design and Experimental Research on Critical Components of Auto Transplanter with Combined Tray; China Agriculture University: Beijing, China, 2017. [Google Scholar]
- Petrescu, F.I.T. Advanced Dynamics Processes Applied to an Articulated Robot. Processes 2022, 10, 640. [Google Scholar] [CrossRef]
- Hroncová, D.; Binda, M.; Šarga, P.; Kičák, F. Kinematical analysis of crank slider mechanism using MSC Adams/View. Procedia Eng. 2012, 48, 213–222. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length of the Needle lP/mm | Distance between AB at the End Time/mm | Distance of Vertical Movement of Point A or B/mm |
|---|---|---|
| 36 | −10.243 | 116.008 |
| 24 | −0.185 | 117.449 |
| 12 | 6.305 | 114.085 |
| Length of the Stretchable Slices lF/mm | Distance between AB at the End Time/mm | Distance of Vertical Movement of Point A or B/mm |
|---|---|---|
| 75 | −1.700 | 89.437 |
| 85 | −2.549 | 65.950 |
| 95 | −4.743 | 53.675 |
| No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Average |
|---|---|---|---|---|---|---|---|---|---|---|---|
| l1 | 28.6 | 28.7 | 27.2 | 26.6 | 29.2 | 29.8 | 28.5 | 28.3 | 28.8 | 27.3 | 28.3 |
| l2 | 12.8 | 13.5 | 14.5 | 12.7 | 12.9 | 12.5 | 13.8 | 12.5 | 13.8 | 14.2 | 13.34 |
| No. | Factors | Evaluation Index | ||||
|---|---|---|---|---|---|---|
| Growing Days/d | Moisture Content/% | Seedling Picking Success Rate/% | Leaf Damage Rate/% | Substrate Damage Rate/% | ||
| 1 | 20 | 35.41 | 85.16 | 1.56 | 2.79 | |
| 2 | 20 | 65.21 | 84.38 | 0.78 | 2.31 | |
| 3 | 30 | 35.41 | 93.75 | 2.34 | 2.07 | |
| 4 | 30 | 65.21 | 92.19 | 3.13 | 1.54 | |
| 5 | 40 | 35.41 | 94.53 | 4.69 | 1.25 | |
| 6 | 40 | 65.21 | 91.41 | 3.91 | 1.15 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, L.; Zhao, B.; Cao, W.; Song, W.; Zhao, M. Design of Stretchable Style Pick-Up Device for Tomato Seedling Transplanters. Agriculture 2022, 12, 707. https://doi.org/10.3390/agriculture12050707
Ren L, Zhao B, Cao W, Song W, Zhao M. Design of Stretchable Style Pick-Up Device for Tomato Seedling Transplanters. Agriculture. 2022; 12(5):707. https://doi.org/10.3390/agriculture12050707
Chicago/Turabian StyleRen, Ling, Bindong Zhao, Weibin Cao, Wenbin Song, and Ming Zhao. 2022. "Design of Stretchable Style Pick-Up Device for Tomato Seedling Transplanters" Agriculture 12, no. 5: 707. https://doi.org/10.3390/agriculture12050707
APA StyleRen, L., Zhao, B., Cao, W., Song, W., & Zhao, M. (2022). Design of Stretchable Style Pick-Up Device for Tomato Seedling Transplanters. Agriculture, 12(5), 707. https://doi.org/10.3390/agriculture12050707