
Development of an Orchard Mowing and Sweeping Device Based on an ADAMS–EDEM Simulation

Abstract
:1. Introduction
2. Materials and Methods
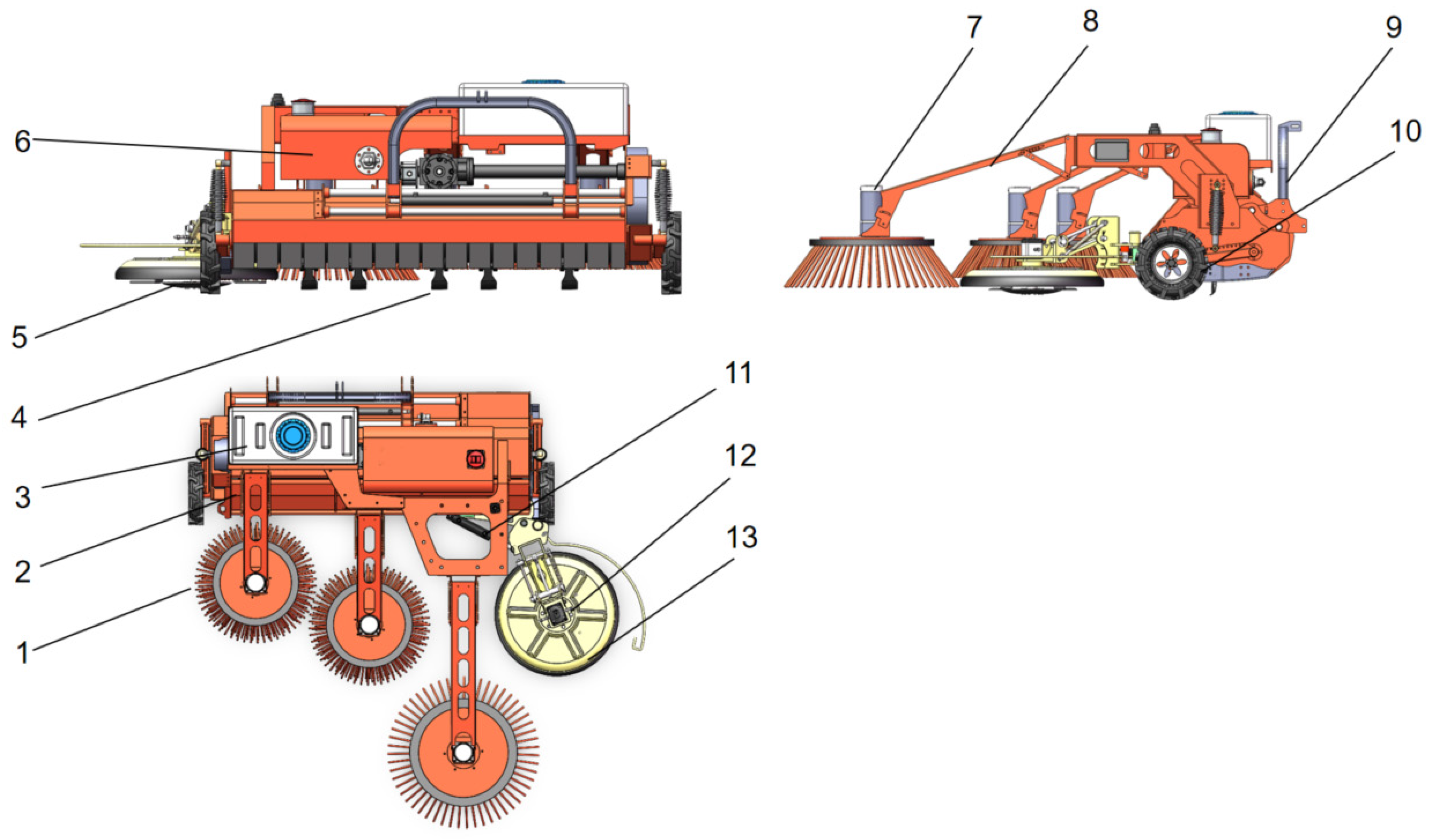
2.1. Overall Structure and Working Principle
2.1.1. Overall Structure
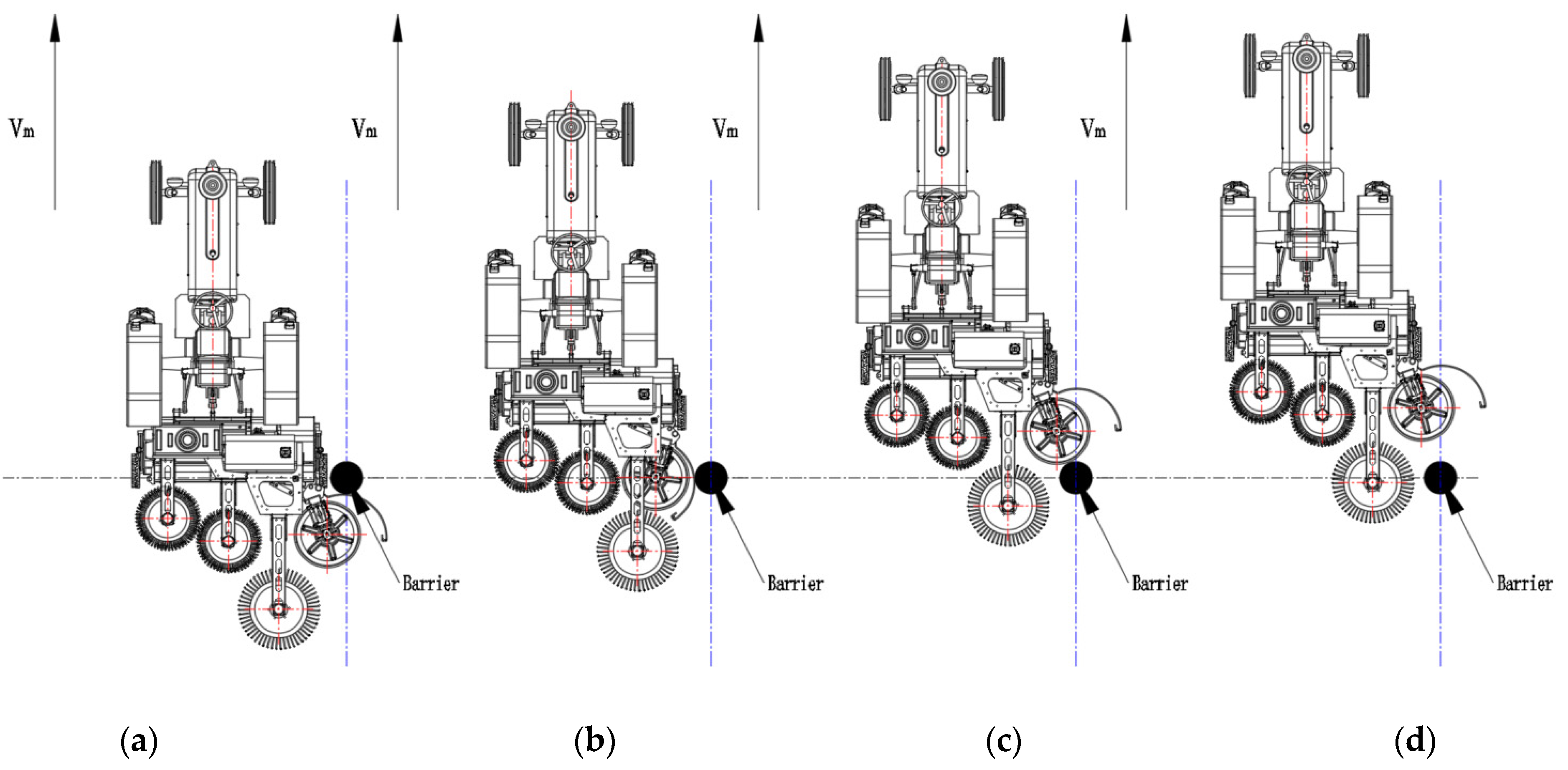
2.1.2. Working Principle
2.2. Design of Key Components
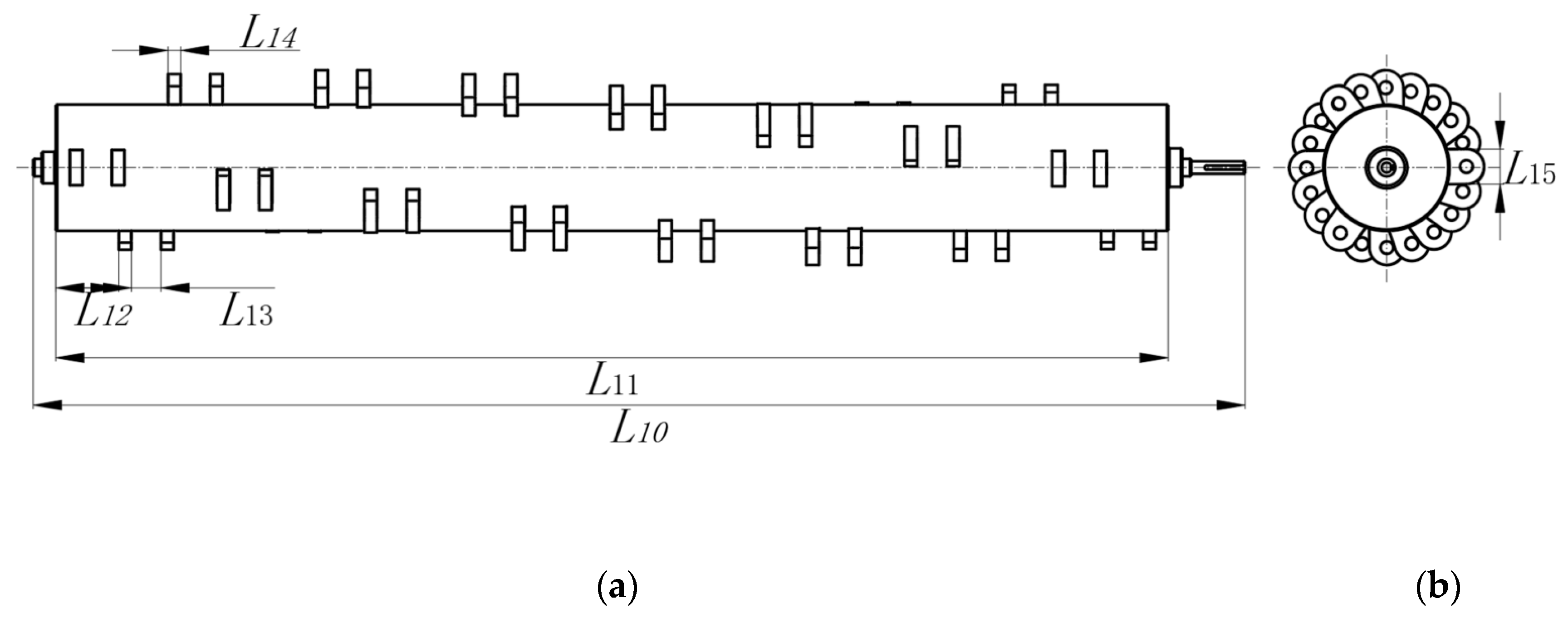
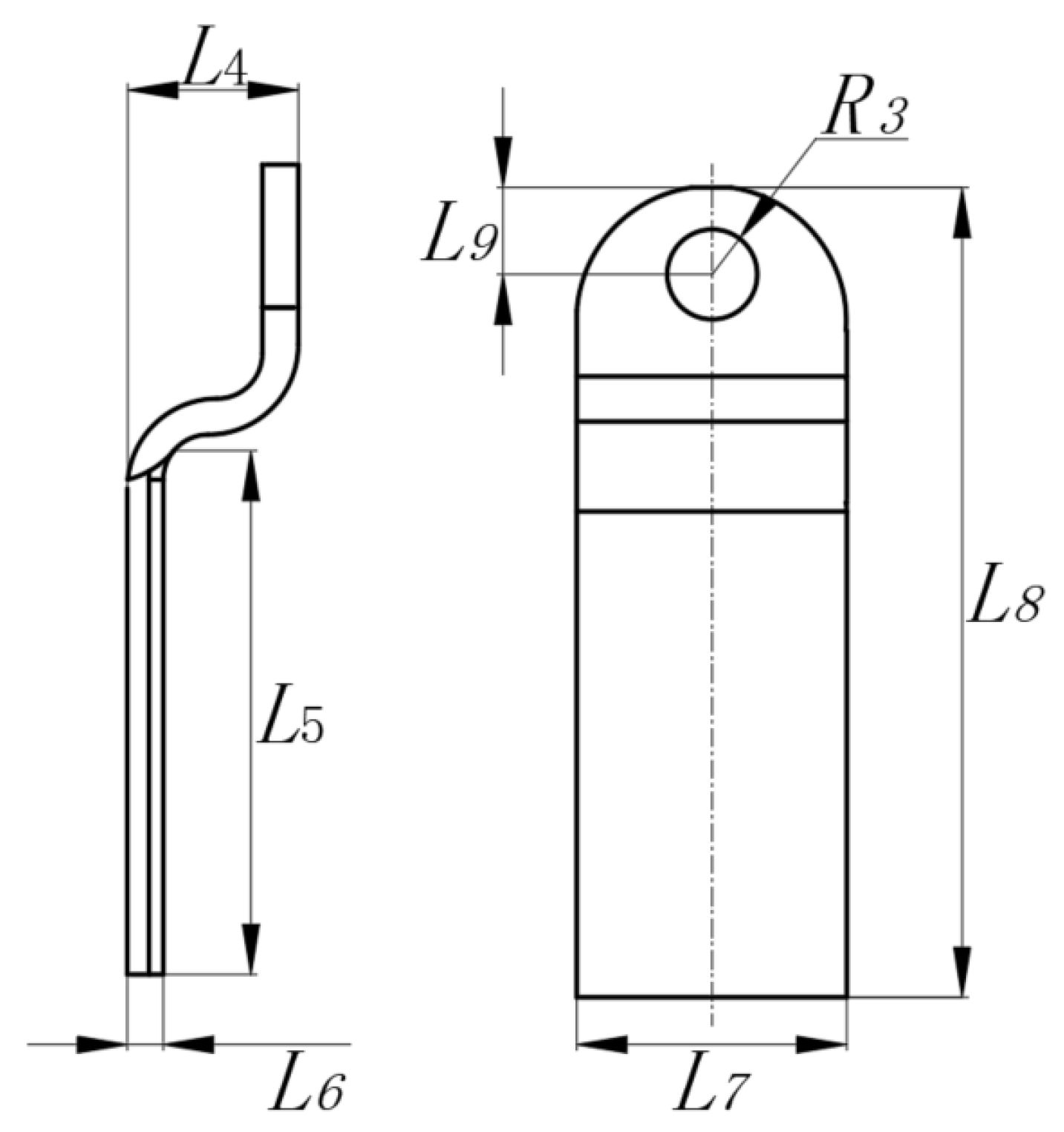
2.2.1. Inter-Row Mowing Components
2.2.2. Inter-Plant Cutting Components
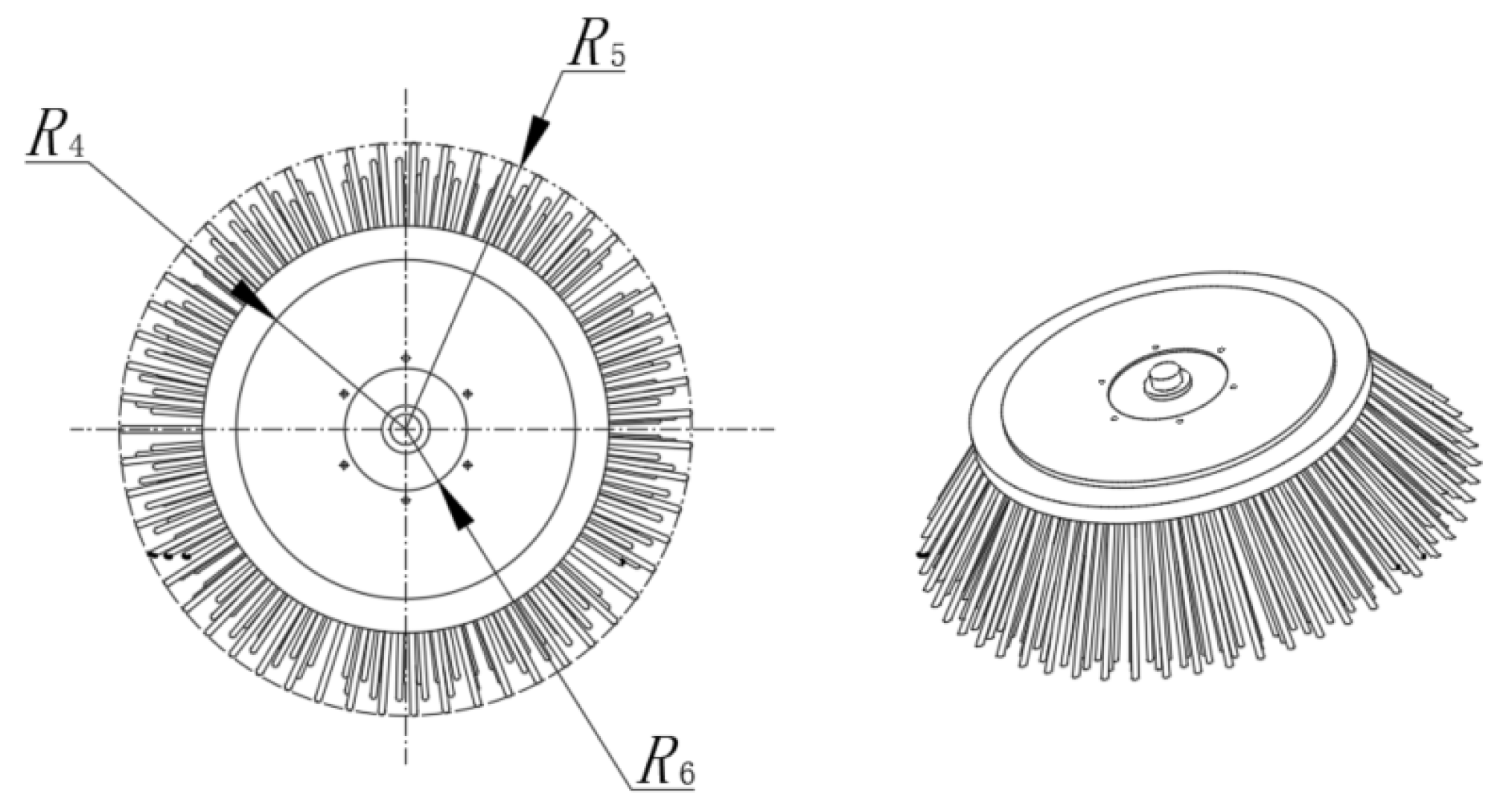
2.2.3. Sweeping Device
2.3. Simulation Test of Grass-Cutting Device
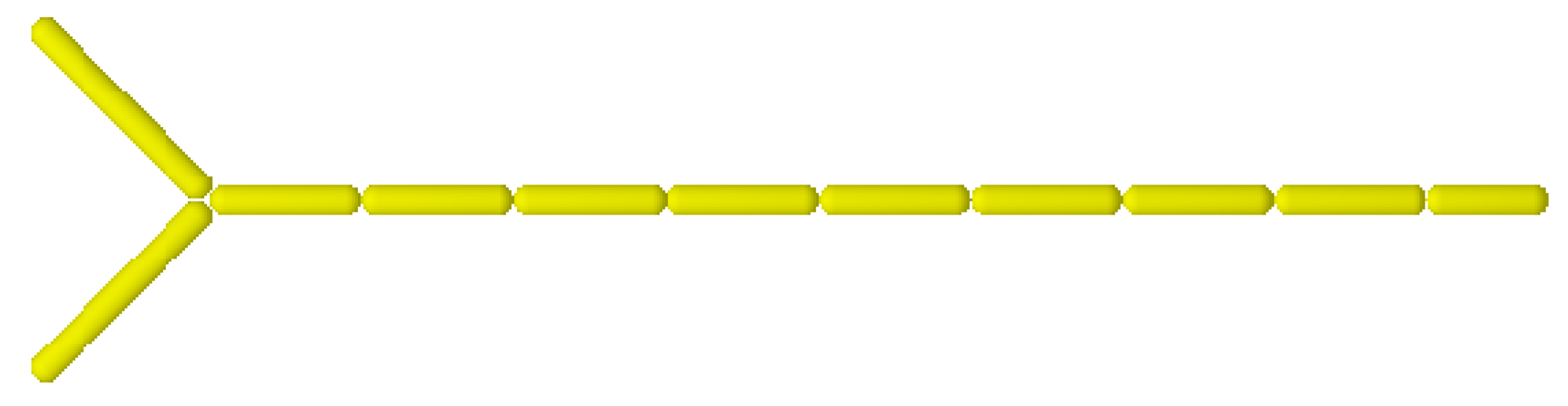
2.3.1. Simulation Modeling in EDEM
- (1)
- Simulation model of weed stalks
- (2)
- Setting of the property parameters of the test materials
- (3)
- Determination of the contact parameters
- (4)
- Earth trough simulation modeling
2.3.2. A Motion Simulation Model Was Constructed in Adams
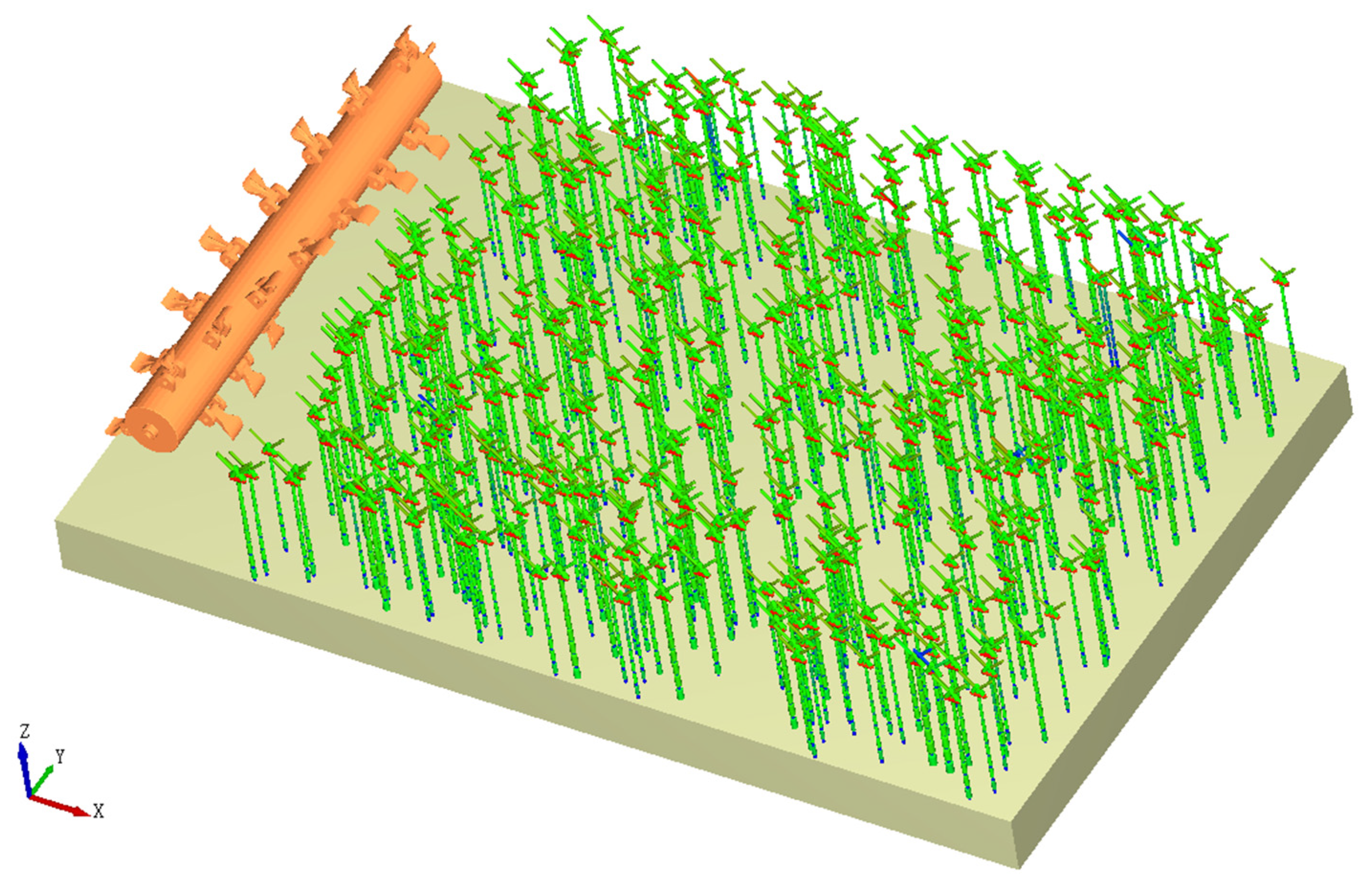
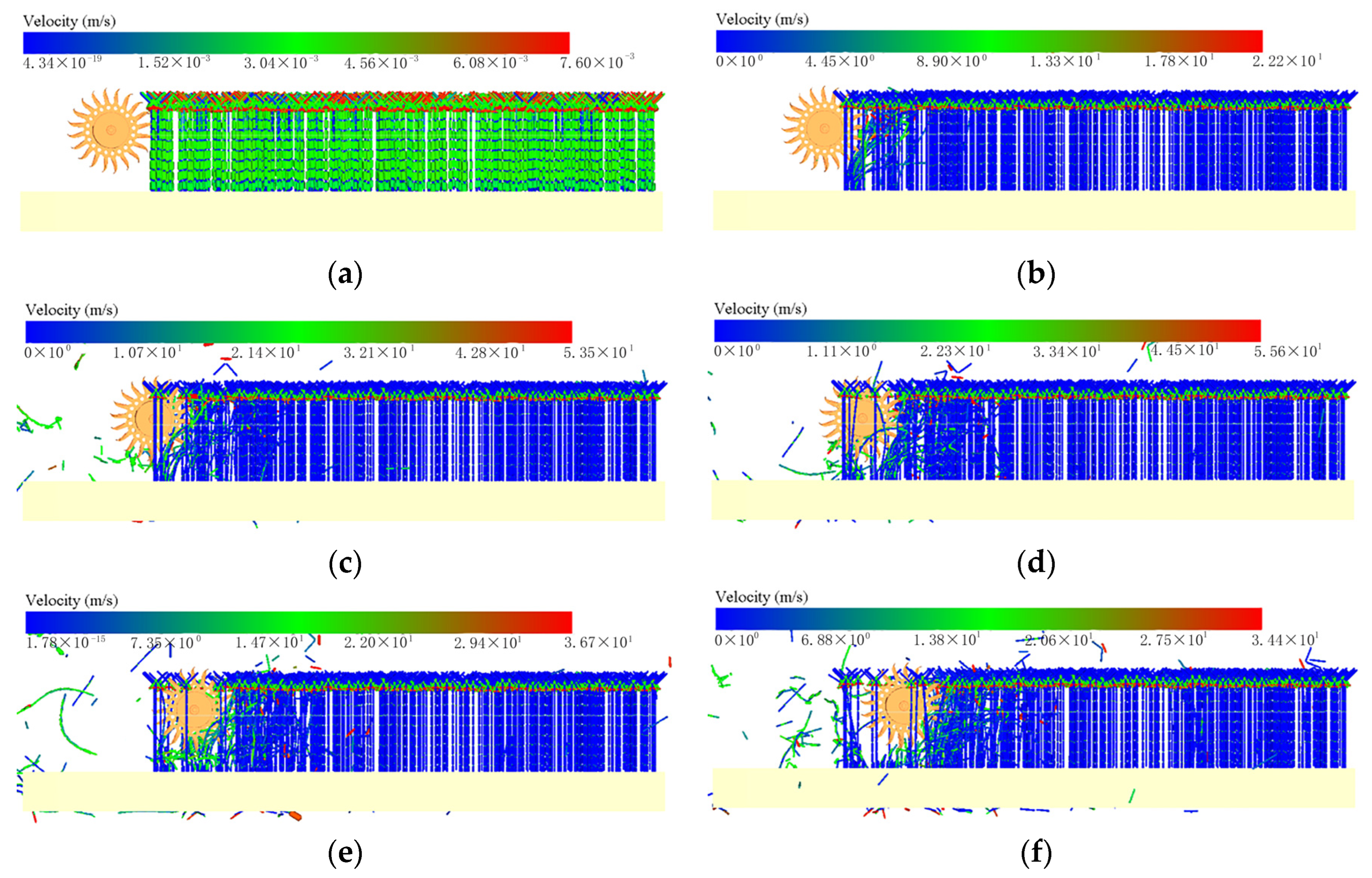
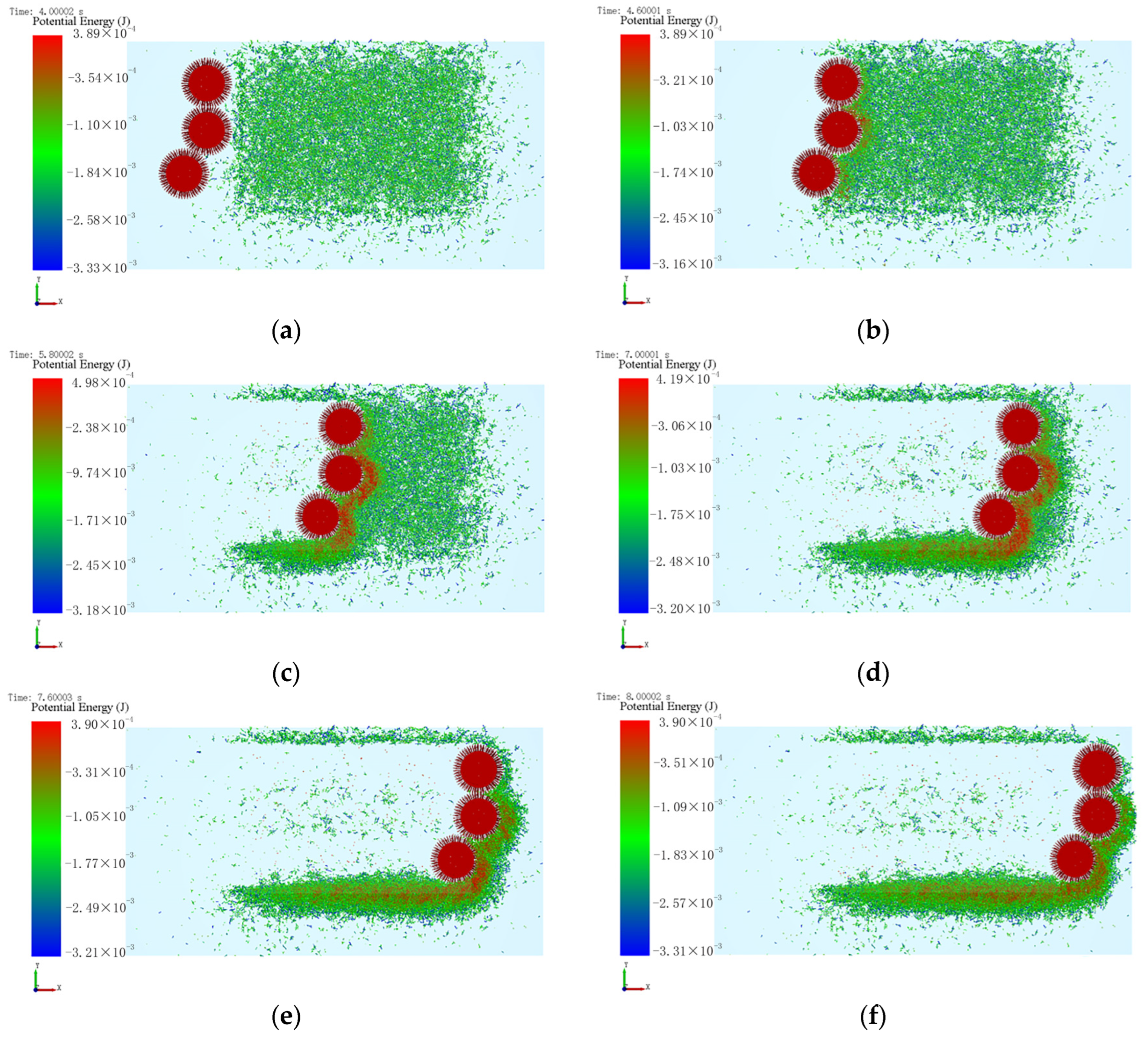
2.3.3. ADAMS–EDEM Coupled Analytical Test
2.3.4. Simulation Analysis of the Sweeping Parts
3. Results and Discussion
3.1. Experimental Scheme and Results
3.2. Analysis of the Experimental Results
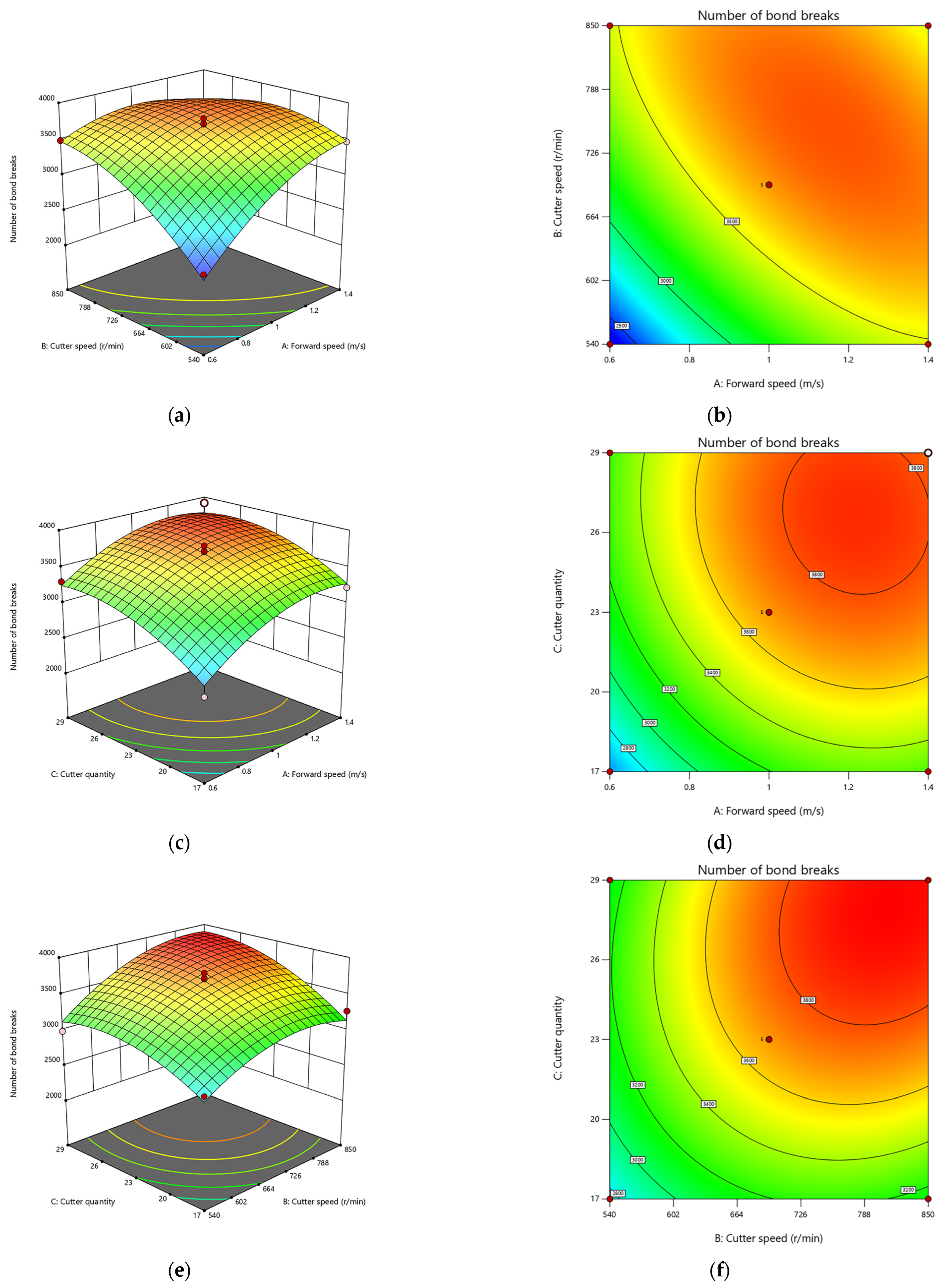
3.3. Fitting Response Surface Method
3.4. Optimization Model Analysis and Laboratory Test Verification
4. Field Test
4.1. Test Conditions and Equipment
4.2. Test Method
4.2.1. Measurement of the Stubble Height
4.2.2. Determination of the Leakage Rate
4.3. Test Results and Analysis
4.3.1. Measurement of Stubble Height
4.3.2. Determination of the Leakage Rate
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Zhao, Y.; Xiao, H.; Mei, S.; Song, Z.Y.; Ding, W.Q.; Jing, Y.; Xia, X.; Yang, G. Current status and development strategies of orchard mechanization production in China. J. China Agric. Univ. 2017, 22, 116–127. [Google Scholar]
- Zhang, Z.; Zhang, C.; Xu, C. The main weed species in the orchard and the pattern of occurrence of damage. Henan Agric. 2009, 19, 15. [Google Scholar]
- Ma, J.; Zhao, R. Orchard mechanical weeding equipment and technology research status and development trend. Agric. Technol. 2016, 36, 45–46. [Google Scholar]
- Yang, L.; Mao, Y.; Hu, Y.; Wang, Y.; Zhang, L.; Yin, Y.; Pang, H.; Su, X.; Liu, Y.; Shen, X. Effectiveness of raw grasses in improving soil fertility and apple tree nutrition in orchards. J. Plant Nutr. Fertil. 2020, 26, 325–337. [Google Scholar]
- Qin, Q.; Song, K.; Sun, L. Efffect inter-row sod system on the contents and availability of soil nutrients in a kiwifruit orchard. J. Fruit Sci. 2020, 37, 68–76. [Google Scholar]
- Hu, P.; Gao, X.D.; Zhao, X.N.; Yu, L.Y.; He, N.N. Effects of grassing on orchard ecosystem services: A global meta-analysis. Chin. J. Eco-Agric. 2022, 30, 1238–1248. [Google Scholar]
- Pan, B.; Huang, X. Design and analysis of an integrated flatland and side slope mower. J. Nanchang Univ. (Eng. Technol.) 2023, 45, 183–188. [Google Scholar]
- Dong, G.; Li, H. The design of a mower used for dikes and dams. Agric. Mech. Res. 2011, 33, 111–114. [Google Scholar]
- Li, D.; Zhang, L.; Ge, Z. Current status of research on weed control technology at home and abroad. For. Eng. 2002, 1, 17–18. [Google Scholar]
- Wen, X. Analysis and prospect of the current development status of orchard mechanization equipment in hilly mountainous areas. Guangdong Sci. Technol. 2021, 30, 34–38. [Google Scholar]
- Chen, J.; Zhang, Q.; Yang, M.; Yuan, Z. Effects of growing grass on microclimate environment and apple leaves in apple orchard. J. Agric. Sci. Technol. 2023, 11, 1–10. [Google Scholar]
- Hui, Z.; Li, H.; Zhou, P.; Yue, T. Effects of cover cropping system on soil moisture content and water storage in a vineyard. Acta Prataculturae Sin. 2011, 2, 62–68. [Google Scholar]
- Wang, S.; Li, B.; Zhao, L.; Wang, S.; Qu, S. Effects of grass on soil physical and chemical properties and microorganism of apple orchard in Huanghuai area. North. Hortic. 2021, 4, 87–92. [Google Scholar]
- Liu, H.; Cao, W.; Xu, C.; Li, W.; Li, X.; Xhang, X. Effect od different stubble heights on grass yield and quality of 3 gramminious forages. Grassl. Lawns 2015, 35, 43–49. [Google Scholar]
- Ma, P. Design and Test of Mountain Orchard Profile Mower; Huazhong Agricultural University: Wuhan, China, 2019. [Google Scholar]
- Wu, B.; Wang, D.; Wang, G.; Fu, Z.; Guo, Z. Simulation analysis and experiment of profiling device of small self-propelled mower. Tran. Chin. Soc. Agric. Mach. 2015, 46, 123–129+108. [Google Scholar]
- Yang, T.; Zhao, W.; Xin, S.; Chen, B.; Zhang, X.; Qu, H. Design and test of articulated steering orchard mower. J. China Agric. Univ. 2022, 27, 61–72. [Google Scholar]
- Zhu, L.; You, Y.; Wang, D.; Zhang, N.; Ma, W.; Liu, Z. Optimal design and experiment of folding mechanism and hydraulic profiling system of hanging mower. Tran. Chin. Soc. Agric. Mach. 2022, 27, 122–130. [Google Scholar]
- Hu, W. Modal analysis of reel mower drum based on Ansys Workbench. Mod. Agric. Mach. 2022, 2, 64–65. [Google Scholar]
- Zhang, F.; Dai, F.; Han, Z.; Zhao, C.; Zhao, W.; Feng, Y.; Zhang, J. Improve design on blades of straw returning machine. Mech. Res. Appl. 2009, 22, 83–85. [Google Scholar]
- Sun, Y.; Zhou, F.; Wang, K.; Wei, Y. Design and experiment of hammer claw pick-up and smash device. J. Jiangsu Univ. 2019, 40, 159–166. [Google Scholar]
- Xie, R. Dynamic Characterization of Hammer Blade Pulverizer. Ph.D. Thesis, Nanjing University of Science and Technology, Nanjing, China, 2008. [Google Scholar]
- Yu, Y.; Zhang, L.; Li, J.; Shi, W. The different air movement under the different blade angle in mower. Res. Des. 2010, 37, 1–2+32. [Google Scholar]
- Zhao, J.; Song, W.; Li, J. Modeling and mechanical analysis of rice straw based on discrete element mechanical model. Chin. J. Soil Sci. 2020, 51, 1086–1093. [Google Scholar]
- Zhu, H.; Wu, X.; Bai, L.; Qian, C.; Zhao, H.; Li, H. Development of the biaxial stubble breaking no-tillage deveice for rice stubble field based on EDEM-ADAMS simulation. Trans. Chin. Soc. Agric. Eng. 2022, 38, 10–22. [Google Scholar]
- Li, F.; Lv, D.; Du, G.; Qi, S. Studies on the suitable moving height of red cloverin sod cultivation apple orchard. J. Jilin Agric. Sci. 2014, 39, 88–91. [Google Scholar]
- Dong, X.; Su, C.; Zheng, H.; Han, R.; Li, Y.; Wan, L.; Song, J.; Wang, J. Analysis of soil disturbance process by vibrating subsoiling based on DEM-MBD coupling algorithm. Trans. Chin. Soc. Agric. Eng. 2022, 38, 34–43. [Google Scholar]
- Xiang, W.; Wu, M.; Lü, J.N.; Quan, W.; Ma, L.; Liu, J. Calibration of simualtion physical parameters of clay loam based on soil accumulation test. Trans. Chin. Soc. Agric. Eng. 2019, 35, 116–123. [Google Scholar]
- Zhang, G.; Chen, L.; Liu, H.; Liu, W.; Zhang, Q.; Kang, Q. Design and experiment of the rotary blade type sychronous cutting device for water chestnut buds and roots. Trans. Chin. Soc. Agric. Eng. 2022, 38, 10–19. [Google Scholar]
- Ma, Y.H.; Song, C.D.; Xuan, C.Z.; Wang, H.Y.; Yang, S.; Wu, P. Parameters calibration of discrete element model for alfalfa straw compression simulation. Trans. Chin. Soc. Agric. Eng. 2020, 36, 22–30. [Google Scholar]
- Du, J.; Heng, Y.; Zheng, K.; Zhang, W.; Zhang, J.; Xia, J. Evaluation of the performance of a combined tillage implement with plough and rotary tiller by experiment and DEM Simulation. Processes 2021, 9, 1174. [Google Scholar] [CrossRef]
- Jia, H.; Deng, J.; Deng, Y.; Chen, T.; Wang, G.; Sun, Z.; Guo, H. Contact parameter analysis and calibration in discrete element simulation of rice straw. Int. J. Agric. Biol. Eng. 2021, 14, 72–81. [Google Scholar] [CrossRef]
- Du, J.; Heng, Y.; Zheng, K.; Luo, C.; Zhu, Y.; Zhang, J.; Xia, J. Investigation of the burial and mixing performance of a rotary tiller using discrete element method. Soil Tillage Res. 2022, 220, 105349. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, L.; Hu, C.; Li, Z.; Tang, J.; Mao, K.; Wang, X. Calibration of wet sand and gravel particles based on JKR contact model. Powder Technol. 2022, 397, 117005. [Google Scholar] [CrossRef]
- Wang, L.; Liu, F.; Wang, Q.; Zhou, J.; Fan, X.; Li, J.; Zhao, X.; Xie, S. Design of a spring-finger potato picker and an experimental study of its picking performance. Agriculture 2023, 13, 945. [Google Scholar] [CrossRef]
- Wu, B.; Zuo, T.; Li, Z.; Qian, H.; Huang, T.; Xiang, Y. Numerical simulation and optimization of the airflow field of a forage drum mower. Appl. Sci. 2023, 13, 5910. [Google Scholar] [CrossRef]
- Hou, S.; Xue, D.; Ji, Z.; Zhou, C.; Chen, H. Parameter Combination optimization of the lateral straw clearing and throwing knife based on discrete element simulation. Agronomy 2023, 13, 1059. [Google Scholar] [CrossRef]
- Liao, Y.; Liao, Q.; Zhou, Y.; Wang, Z.; Jiang, Y.; Liang, F. Parameters calibration of discrete element model of fodder rape crop harvest in bolting stage. Tran. Chin. Soc. Agric. Mach. 2020, 51, 73–82. [Google Scholar]
- Hou, J.; Xie, F.; Wang, X.; Liu, D.; Chen, Z. Measurement of contact physical parameters of flexible rice straw and discrete element simulation calibration. Acta Agric. Univ. Jiangxiensis 2022, 44, 747–758. [Google Scholar]
- Yao, W.; Zhao, D.; Miao, H.; Cui, P.; Wei, M.; Diao, P. Design and experiment of oblique anti-blocking device for no-tillage planter with shallow stubble clearing. Tran. Chin. Soc. Agric. Mach. 2022, 53, 42–52. [Google Scholar]
- GB/T 10938-2008; Rotary Mowers. Standards Press of China: Beijing, China, 2009.
- Yang, F.; Sun, J.; Li, Y.; Zhang, Y.; Liu, Z. Design and performance test of image transmission remote control mower in closed orchard. J. Jilin Univ. (Eng. Technol. Ed.) 2023, 11, 1–18. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Position X (m) | Position Y (m) | Position Z (m) | Rotation Y (deg) |
|---|---|---|---|---|
| particle 0 | 0 | 0 | 0 | 90 |
| particle 1 | 0 | 0 | 0.045 | 90 |
| particle 2 | 0 | 0 | 0.095 | 90 |
| particle 3 | 0 | 0 | 0.145 | 90 |
| particle 4 | 0 | 0 | 0.195 | 90 |
| particle 5 | 0 | 0 | 0.245 | 90 |
| particle 6 | 0 | 0 | 0.295 | 90 |
| particle 7 | 0 | 0 | 0.345 | 90 |
| particle 8 | 0 | 0 | 0.395 | 90 |
| particle 9 | −0.03 | 0 | 0.449 | 45 |
| particle 10 | 0.03 | 0 | 0.449 | −45 |
| Material | Poisson’s Ratio | Densities (kg/m3) | Modulus of Elasticity (Pa) |
|---|---|---|---|
| Mowing device | 0.3 | 7800 | 1.72 × 1011 |
| Sweeping device | 0.3 | 1150 | 1.4 × 1011 |
| Clover stalks | 0.4 | 227 | 1 × 106 |
| Contact Model | Coefficient of Static Friction | Coefficient of Rolling Friction | Coefficient of Restitution |
|---|---|---|---|
| Lucerne–lucerne | 0.3 | 0.3 | 0.01 |
| cast steel–lucerne | 0.3 | 0.3 | 0.01 |
| Nylon–Alfalfa | 0.3 | 0.2 | 0.03 |
| Level | Test Factors | ||
|---|---|---|---|
| A: Forward Speed (m/s) | B: Cutter Speed (r/min) | C: Cutter Quantity | |
| −1 | 1.4 | 850 | 29 |
| 0 | 1 | 695 | 23 |
| 1 | 0.6 | 540 | 17 |
| Serial Number | Test Factors | Test Indicators | |||
|---|---|---|---|---|---|
| A m/s | B r/min | C | Y1 | Y2 kW | |
| 1 | 1 | 540 | 29 | 2789 | 3.23 |
| 2 | 1.4 | 850 | 23 | 3515 | 3.04 |
| 3 | 0.6 | 695 | 29 | 3302 | 3.42 |
| 4 | 1 | 540 | 17 | 3827 | 3.74 |
| 5 | 1 | 695 | 23 | 3503 | 3.01 |
| 6 | 1 | 695 | 23 | 3501 | 3.05 |
| 7 | 0.6 | 695 | 17 | 2473 | 2.78 |
| 8 | 1.4 | 540 | 23 | 3170 | 3.32 |
| 9 | 1.4 | 695 | 29 | 3512 | 3.62 |
| 10 | 1 | 695 | 23 | 3511 | 3.05 |
| 11 | 1 | 695 | 23 | 3505 | 2.99 |
| 12 | 1 | 850 | 17 | 3171 | 3.42 |
| 13 | 1 | 695 | 23 | 3491 | 3.03 |
| 14 | 0.6 | 540 | 23 | 2403 | 2.57 |
| 15 | 1.4 | 695 | 17 | 3021 | 3.11 |
| 16 | 0.6 | 850 | 23 | 3287 | 3.31 |
| 17 | 1 | 850 | 29 | 3827 | 3.74 |
| Source of Variance | Number of Bond Breaks | |||||
| Sum of Squares | Freedom | Mean Square | F-Value | p-Value | Significance | |
| Model | 3.135 × 106 | 9 | 3.483 × 105 | 18.52 | 0.0004 | ** |
| A | 6.903 × 105 | 1 | 6.903 × 105 | 36.70 | 0.0005 | ** |
| B | 6.659 × 105 | 1 | 6.659 × 105 | 35.40 | 0.0006 | ** |
| C | 6.261 × 105 | 1 | 6.261 × 105 | 33.29 | 0.0007 | ** |
| AB | 3.26 × 105 | 1 | 3.260 × 105 | 17.33 | 0.0042 | ** |
| AC | 4761.00 | 1 | 4761.00 | 0.2531 | 0.6303 | |
| BC | 38,809.00 | 1 | 38,809.00 | 2.06 | 0.1940 | |
| A2 | 2.576 × 105 | 1 | 2.576 × 105 | 13.70 | 0.0076 | ** |
| B2 | 2.545 × 105 | 1 | 2.545 × 105 | 13.53 | 0.0079 | ** |
| C2 | 1.890 × 105 | 1 | 1.890 × 105 | 10.05 | 0.0157 | * |
| Residuals | 1.317 × 105 | 7 | 18,808.83 | |||
| Failure to fit | 1.053 × 105 | 3 | 35,112.33 | 5.34 | 0.0698 | |
| Error | 26,324.8 | 4 | 6581.20 | |||
| Total | 3.267 × 106 | 16 | ||||
| Source of Variance | Power kW | |||||
| Sum of Squares | Freedom | Mean Square | F-Value | p-Value | Significance | |
| Model | 1.45 | 9 | 0.1616 | 4.63 | 0.0027 | ** |
| A | 0.5305 | 1 | 0.5305 | 15.19 | 0.0059 | ** |
| B | 0.1250 | 1 | 0.1250 | 3.58 | 0.1003 | |
| C | 0.0545 | 1 | 0.0545 | 1.56 | 0.2519 | |
| AB | 0.0182 | 1 | 0.0182 | 0.5221 | 0.4934 | |
| AC | 0.0462 | 1 | 0.0462 | 1.32 | 0.2876 | |
| BC | 0.1722 | 1 | 0.1722 | 4.93 | 0.0618 | |
| A2 | 0.0281 | 1 | 0.0281 | 0.8061 | 0.3991 | |
| B2 | 0.0864 | 1 | 0.0864 | 2.48 | 0.1597 | |
| C2 | 0.3872 | 1 | 0.3872 | 11.09 | 0.0126 | * |
| Residuals | 0.2444 | 7 | 0.0349 | |||
| Failure to fit | 0.2033 | 3 | 0.0678 | 6.59 | 0.050 | |
| Error | 0.0411 | 4 | 0.0103 | |||
| Total | 1.70 | 16 | ||||
| Serial Number | Mowing Position/m | Stubble Height/m | Average Height/m |
|---|---|---|---|
| 1 | 20 | 0.12 | 0.11 |
| 2 | 25 | 0.13 | |
| 3 | 30 | 0.09 | |
| 4 | 35 | 0.15 | |
| 5 | 40 | 0.08 | |
| 6 | 45 | 0.12 | |
| 7 | 50 | 0.09 | |
| 8 | 55 | 0.11 | |
| 9 | 60 | 0.10 |
| Serial Number | Measurement of Total Area/m2 | Uncut Area/m2 | Undercutting Rate/% | Average Leakage Rate/% |
|---|---|---|---|---|
| 1 | 1.5 | 0.14 | 9.3 | 7.04 |
| 2 | 1.5 | 0.09 | 6.0 | |
| 3 | 1.5 | 0.10 | 6.7 | |
| 4 | 1.5 | 0.09 | 6.0 | |
| 5 | 1.5 | 0.12 | 8.0 | |
| 6 | 1.5 | 0.12 | 8.0 | |
| 7 | 1.5 | 0.10 | 6.7 | |
| 8 | 1.5 | 0.09 | 6.0 | |
| 9 | 1.5 | 0.10 | 6.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, S.; He, Y.; Tang, Z.; Dai, Y.; Wang, Y.; Ma, J. Development of an Orchard Mowing and Sweeping Device Based on an ADAMS–EDEM Simulation. Agriculture 2023, 13, 2276. https://doi.org/10.3390/agriculture13122276
Shen S, He Y, Tang Z, Dai Y, Wang Y, Ma J. Development of an Orchard Mowing and Sweeping Device Based on an ADAMS–EDEM Simulation. Agriculture. 2023; 13(12):2276. https://doi.org/10.3390/agriculture13122276
Chicago/Turabian StyleShen, Shuai, Yichuan He, Zhihui Tang, Yameng Dai, Yu Wang, and Jiaxin Ma. 2023. "Development of an Orchard Mowing and Sweeping Device Based on an ADAMS–EDEM Simulation" Agriculture 13, no. 12: 2276. https://doi.org/10.3390/agriculture13122276