

Real-Time Kinematic Imagery-Based Automated Levelness Assessment System for Land Leveling


Abstract
:1. Introduction
2. Materials and Methods
2.1. RTK Techniques
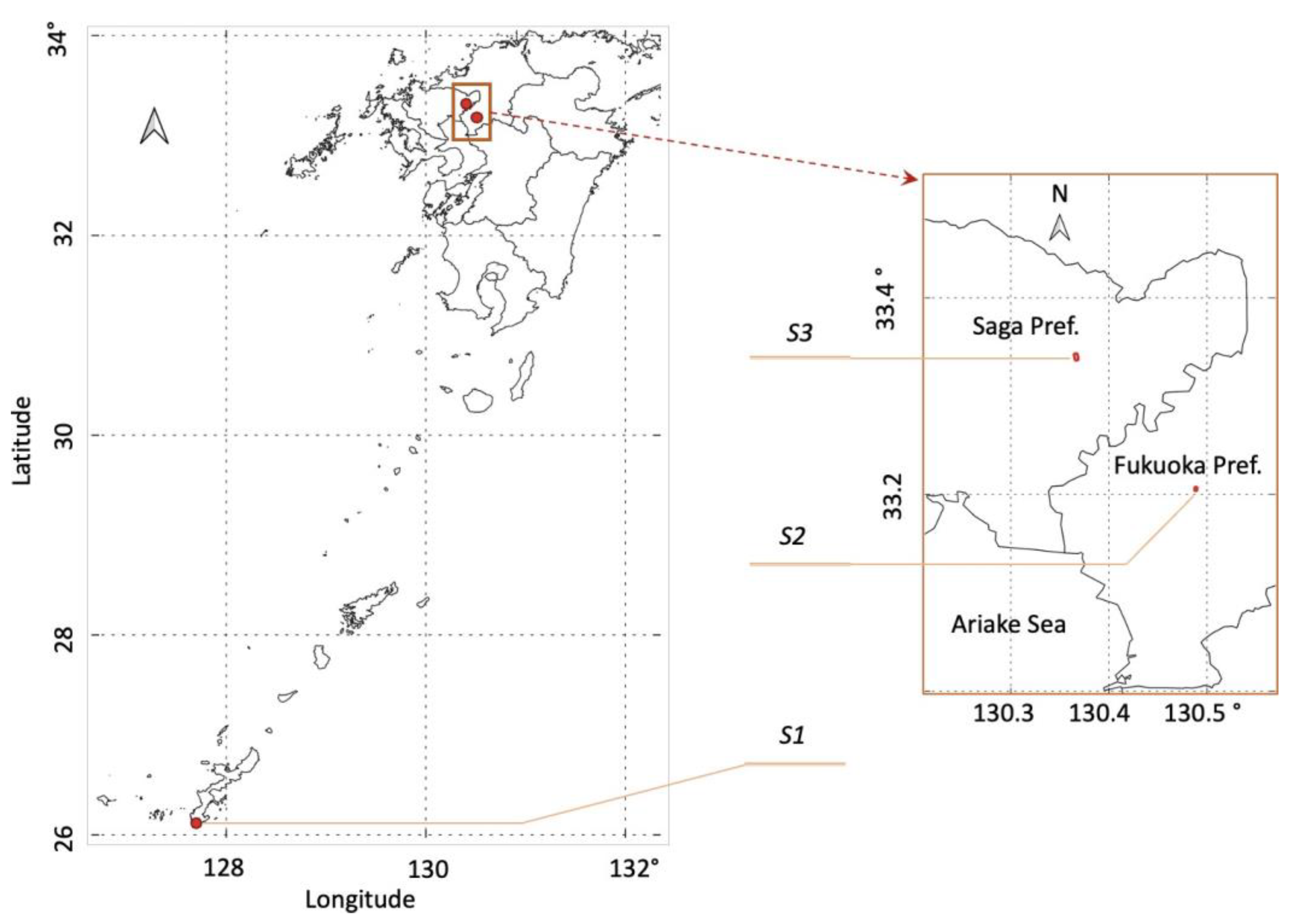
2.2. The Study Sites
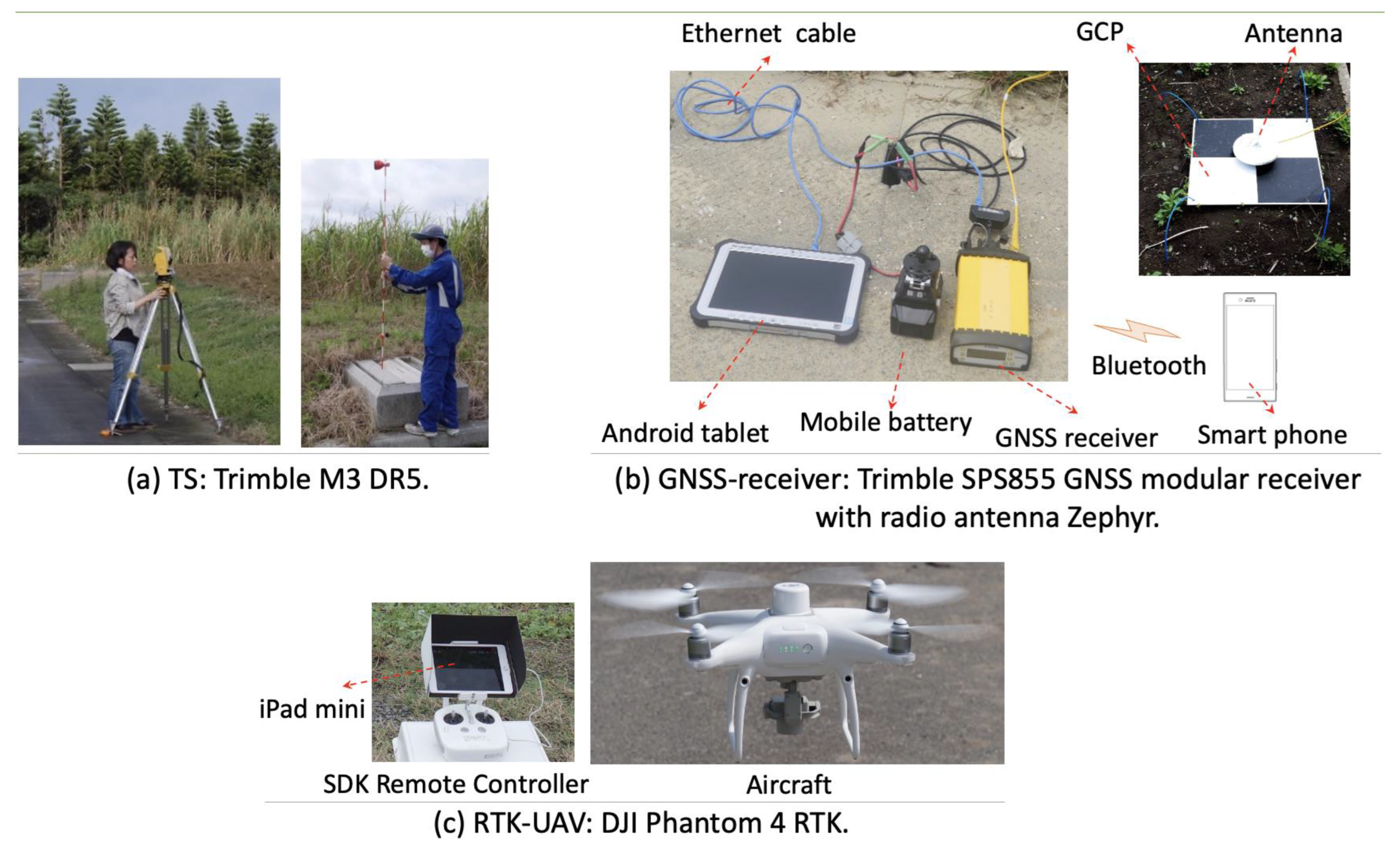
2.3. The Used Instruments and Experimental Conditions
- Calculate the center point (p, p) of all the RTK-UAV-measured points in a universal transverse Mercator (UTM) coordinate system: the UTM zone 52N for our study case.
- Calculate the angles of θp for all points (xp – p, yp – p) (usually by a mathematics function atan2) and their average value p
- Calculate the center point (t, t) of all TS-measured points
- Calculate the angles of θt for all points (xt – t, yt – t) and their average value tCalculate the rotation angle of θ by θ = t – p
- Rotate the points (x, y) by x = xt cos θ + yt sin θ, y = −xt sin θ + yt cos θ
- Transform all the points (x, y) into the UTM coordinate system by x = x + p, y = y + p
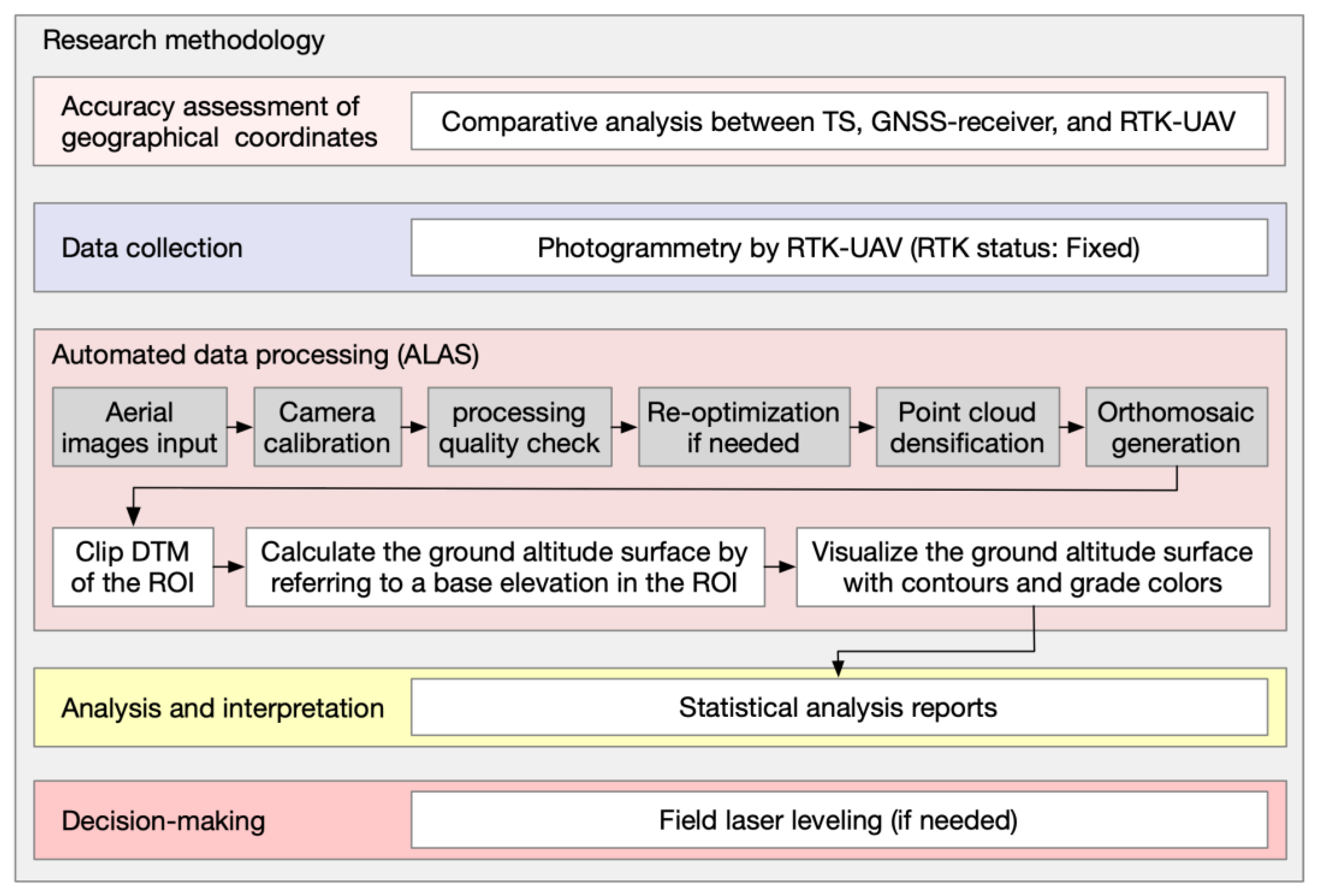
2.4. Description of Research Methodology
3. Results
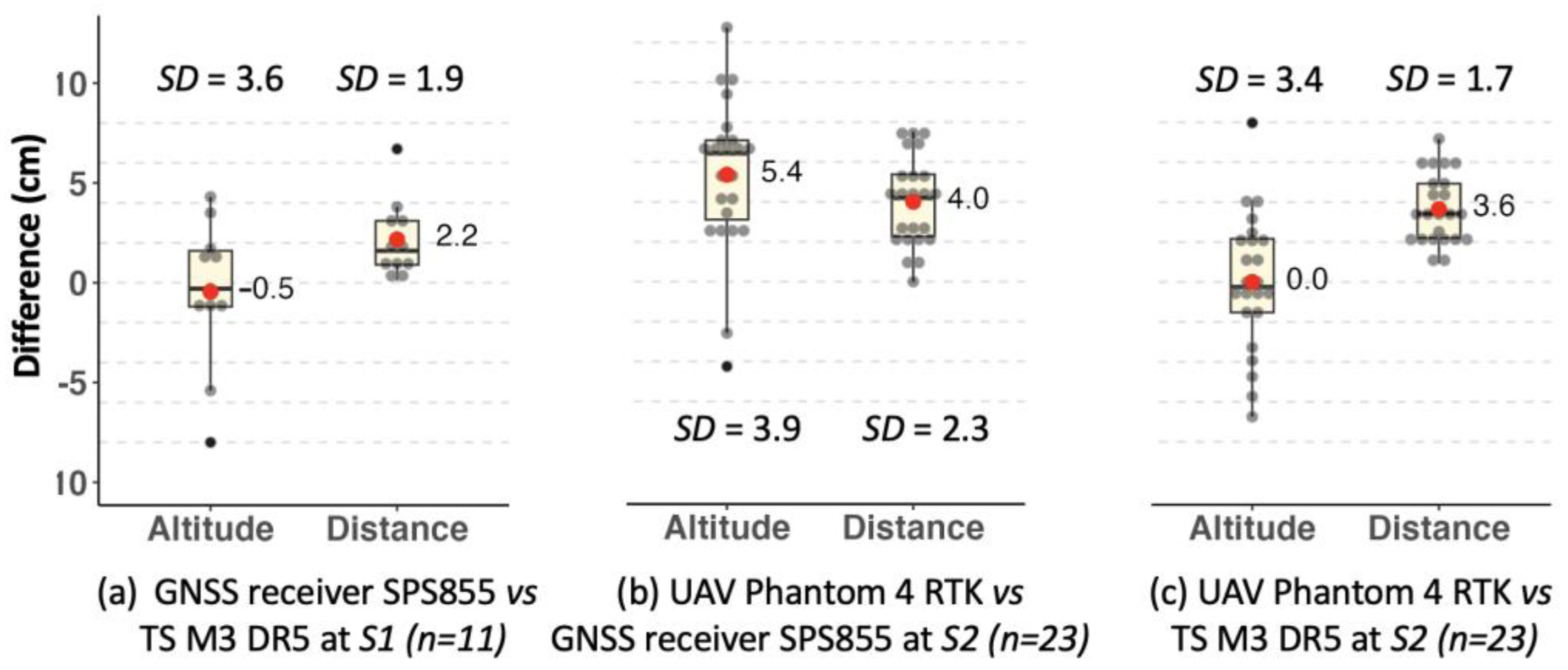
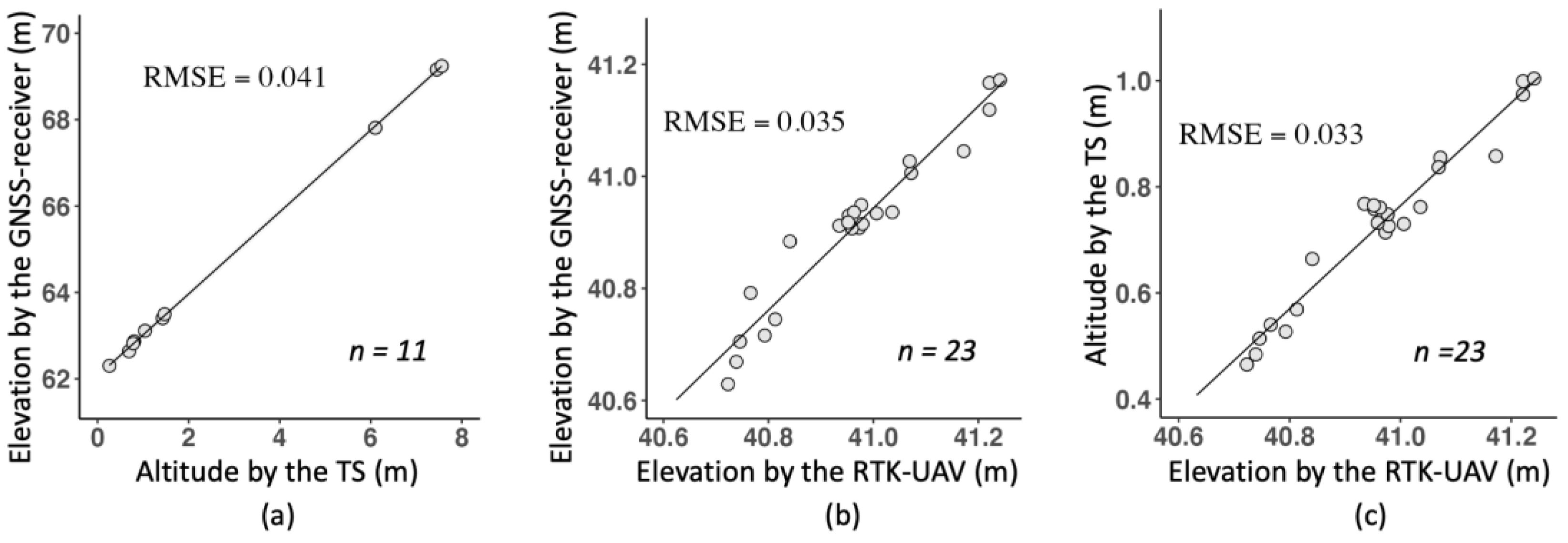
3.1. Comparisons of the Measurement Accuracy for the TS, the GNSS-Receiver and the RTK-UAV Instruments
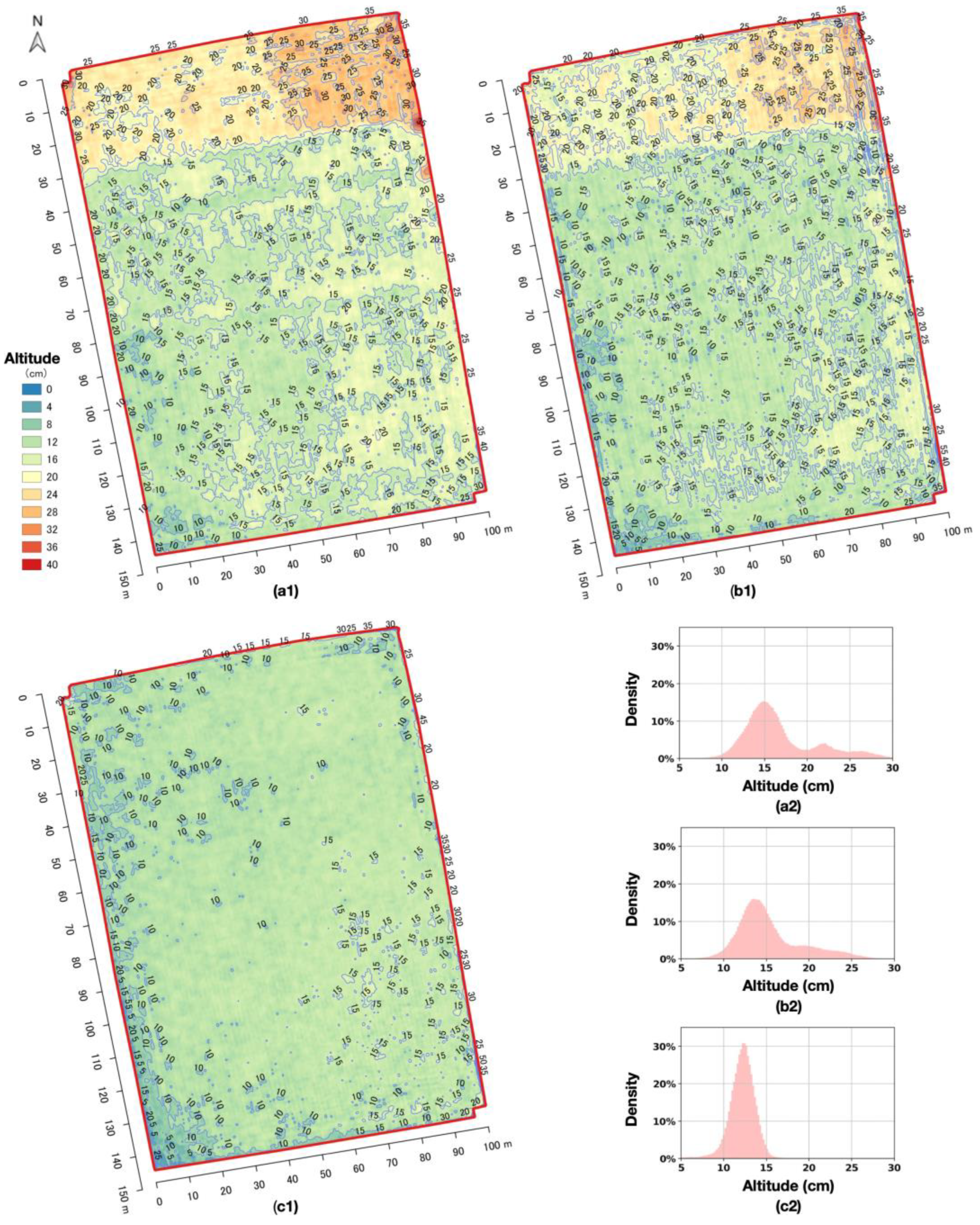
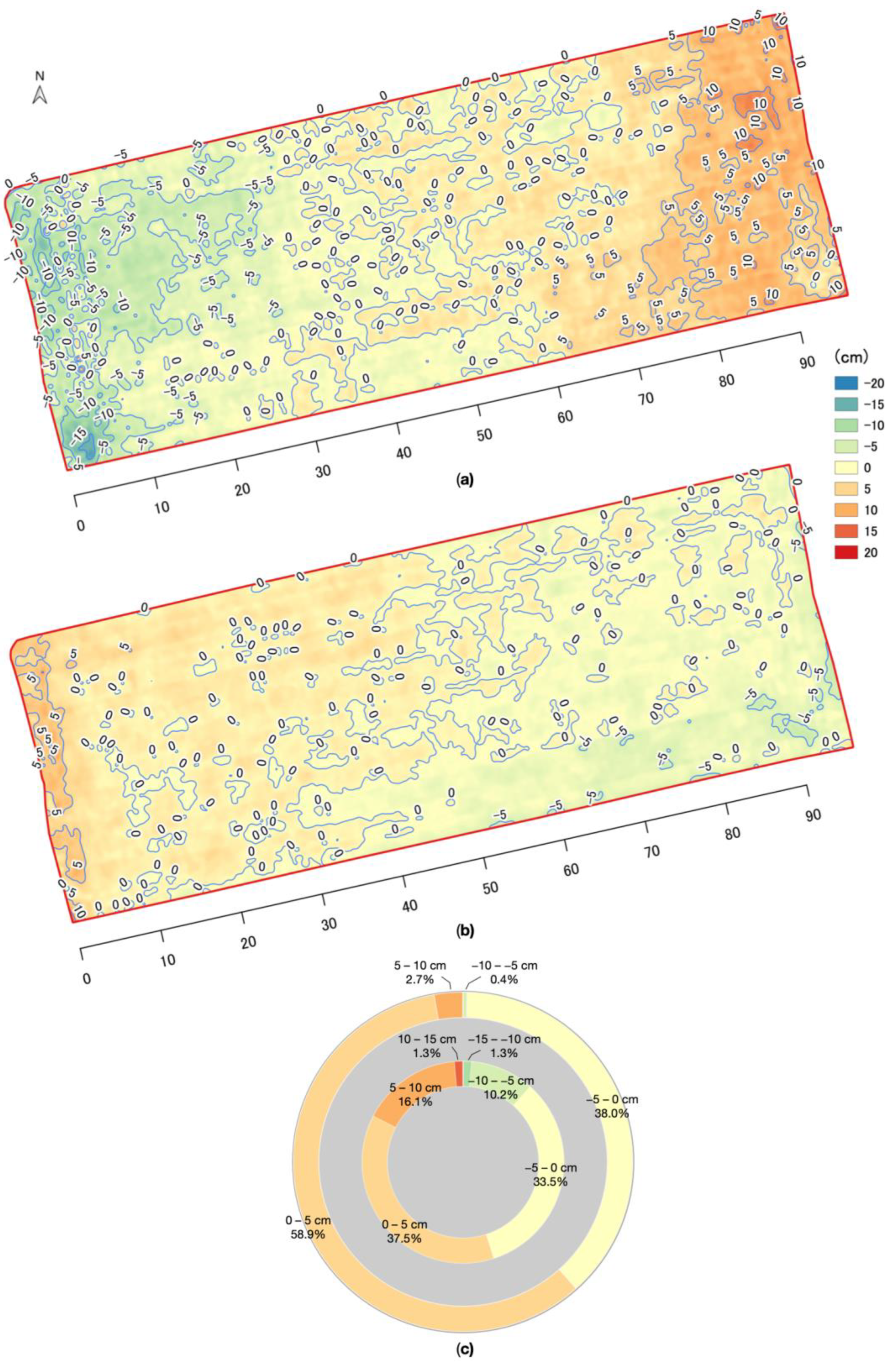
3.2. Data Analysis on the Field Levelness
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AGL | Above Ground Level |
| ALAS | Automated Levelness Assessment System |
| CRS | Coordinate Reference System (CRS) |
| DSM | Digital Surface Model |
| DTM | Digital Terrain Model |
| GCP | Ground Control Point |
| GNSS | Global Navigation Satellite System |
| GSD | Ground Sample Distance |
| NMEA | National Marine Electronics Association |
| NTRIP | Networked Transport of RTCM via Internet Protocol (NTRIP) |
| PIV | Precise Integrated Visual |
| PPP | Precise Point Positioning |
| RMSE | Root Mean Squared Error |
| ROI | Region of Interest |
| RRS | Real Reference Station |
| RTCM | Radio Technical Commission for Maritime Services |
| RTK | Real-Time Kinematic |
| TS | Total Station |
| UAV | Unmanned Aerial Vehicle |
| UTM | Universal Transverse Mercator (UTM) |
| VRS | Virtual Reference Station |
| WGS | World Geodetic System |
References
- Kawaguchi, K. Wet Injury of Wheat in Upland Field Converted from Paddy Field in Japan. In Proceedings of the 7th Asian Crop. Science Association Conference, Bogor, Indonesia, 27–30 September 2011; pp. 147–152. [Google Scholar]
- Nomiyama, R.; Matsuo, N.; Wakiyama, Y.; Shibata, S.; Sakae, S.; Ishitsuka, N.; Iwasaki, N.; Sakamoto, T. Effects of the Roughness of Paddy Field After the Kumamoto Earthquake on the Growth and Yield of Soybean. Jpn. J. Crop. Sci. 2018, 87, 176–182. [Google Scholar] [CrossRef] [Green Version]
- Osari, H. A method for assessing land leveling to produce high-quality consolidated paddy fields. Bull. Natl. Res. Inst. Agric. Eng. 2003, 42, 35–41. [Google Scholar] [CrossRef]
- Yamaji, E. Standard and evaluation of paddy field consolidation. In Proceedings of the Soil and Water Engineering for Paddy Field Management, Asian Institute of Technology, Bangkok, Thailand, 28–30 January 1992. [Google Scholar]
- Oguchi, T.; Yuichi, S.H.; Wasklewicz, T. Chapter Seven—Data Sources. In Geomorphological Mapping; Elsevier: Amsterdam, The Netherlands, 2011; Volume 15, pp. 189–224. [Google Scholar] [CrossRef]
- Cawood, A.J.; Bond, C.E.; Howell, J.A.; Butler, R.W.; Totake, Y. LiDAR, UAV or compass-clinometer? Accuracy, coverage and the effects on structural models. J. Struct. Geol. 2017, 98, 67–82. [Google Scholar] [CrossRef]
- Lin, Y.C.; Cheng, Y.T.; Zhou, T.; Ravi, R.; Hasheminasab, S.M.; Flatt, J.E.; Troy, C.; Habib, A. Evaluation of UAV LiDAR for mapping coastal environments. Remote Sens. 2019, 11, 2893. [Google Scholar] [CrossRef] [Green Version]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Ulvi, A. Documentation, Three-Dimensional (3D) Modelling and visualization of cultural heritage by using Unmanned Aerial Vehicle (UAV) photogrammetry and terrestrial laser scanners. Int. J. Remote Sens. 2021, 42, 1994–2021. [Google Scholar] [CrossRef]
- Kashani, A.G.; Graettinger, A.J.; Dao, T. Lidar-based methodology to evaluate fragility models for tornado-induced roof damage. Nat. Hazards Rev. 2016, 17, 04016006. [Google Scholar] [CrossRef]
- Mora, O.E.; Suleiman, A.; Chen, J.; Pluta, D.; Okubo, M.H.; Josenhans, R. Comparing sUAS photogrammetrically-derived point clouds with GNSS measurements and terrestrial laser scanning for topographic mapping. Drones 2019, 3, 64. [Google Scholar] [CrossRef] [Green Version]
- Štroner, M.; Urban, R.; Línková, L. A New Method for UAV Lidar Precision Testing Used for the Evaluation of an Affordable DJIZENMUSE L1 Scanner. Remote Sens. 2021, 13, 4811. [Google Scholar] [CrossRef]
- Diara, F.; Roggero, M. Quality Assessment of DJI Zenmuse L1 and P1 LiDAR and Photogrammetric Systems: Metric and Statistics Analysis with the Integration of Trimble SX10 Data. Geomatics 2022, 2, 254–281. [Google Scholar] [CrossRef]
- Aksoy, E.; Ozsoy, G.; Dirim, M. Soil mapping approach in GIS using Landsat satellite imagery and DEM data. Afr. J. Agr. Res. 2009, 4, 1295–1302. [Google Scholar]
- Hirano, A.; Welch, R.; Lang, H. Mapping from ASTER stereo image data: DEM validation and accuracy assessment. ISPRS-J. Photogramm. Remote Sens. 2003, 57, 356–370. [Google Scholar] [CrossRef]
- Sari, I.L.; Maulana, R.; Dyatmika, H.S.; Suprijanto, A.; Arief, R.; Ali, S. Study of Digital Elevation Model (DEM) Extraction using Stereo Radargrammetry TerraSAR-X in Madiun Area—Elevation Accuracy Improvement. E3S Web Conf. 2019, 94, 04003. [Google Scholar] [CrossRef]
- Mesas-Carrascosa, F.J.; Notario-García, M.D.; de Larriva, J.E.M.; de la Orden, M.S.; Porras, A.G.F. Validation of measurements of land plot area using UAV imagery. Int. J. Appl. Earth Obs. 2014, 33, 270–279. [Google Scholar] [CrossRef]
- Enciso, J.; Jung, J.; Chang, A.; Chavez, J.C.; Yeom, J.; Landivar, J.; Cavazos, G. Assessing land leveling needs and performance with unmanned aerial system. J. Appl. Remote Sens. 2018, 12, 016001. [Google Scholar] [CrossRef] [Green Version]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of unmanned aerial vehicle (UAV) and SfM photogrammetry survey as a function of the number and location of ground control points used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef] [Green Version]
- Urban, R.; Reindl, T.; Broucˇek, J. Testing of drone DJI Phantom 4 RTK accuracy. In Advances and Trends in Geodesy, Cartography and Geoinformatics II.; CRC Press: Boca Raton, FL, USA, 2020; pp. 99–105. [Google Scholar]
- Ekaso, D.; Nex, F.; Kerle, N. Accuracy assessment of real-time kinematics (RTK) measurements on unmanned aerial vehicles (UAV) for direct geo-referencing. Geo Spat Inf Sci. 2020, 23, 165–181. [Google Scholar] [CrossRef] [Green Version]
- Jiménez-Jiménez, S.I.; Ojeda-Bustamante, W.; Marcial-Pablo, M.d.J.; Enciso, J. Digital terrain models generated with low-cost UAV photogrammetry: Methodology and accuracy. ISPRS Int. J. Geo-Inf. 2021, 10, 285. [Google Scholar] [CrossRef]
- Hinge, L.; Gundorph, J.; Ujang, U.; Azri, S.; Anton, F.; Rahman, A.A. Comparative analysis of 3D photogrammetry modeling software packages for drones survey. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 95–100. [Google Scholar] [CrossRef] [Green Version]
- Ihsan, M.; Somantri, L.; Sugito, N.; Himayah, S.; Affriani, A. The Comparison of Stage and Result Processing of Photogrammetric Data Based on Online Cloud Processing. IOP Conf. Ser. Earth Environ. Sci. 2019, 286, 012041. [Google Scholar] [CrossRef]
- PIX4D. Pix4Dengine SDK Quick-Start. PIX4D SA. 2019. Available online: https://developer.pix4d.com/server/1.4.0/quickstart.html (accessed on 6 March 2023).
- GDAL/OGR Contributors. GDAL/OGR Geospatial Data Abstraction software Library. Open Source Geospatial Foundation. 2021. Available online: https://gdal.org/faq.html#how-do-i-cite-gdal (accessed on 6 March 2023).
- QGIS.org. QGIS Geographic Information System. QGIS.org. 2022. Available online: https://qgis.org/en/site/getinvolved/faq/index.html (accessed on 6 March 2023).
- Anbumozhi, V.; Yamaji, E.; Tabuchi, T. Rice crop growth and yield as influenced by changes in ponding water depth, water regime and fertigation level. Agric. Water Manag. 1998, 37, 241–253. [Google Scholar] [CrossRef]
- Freney, J.; Trevitt, A.; Muirhead, W.; Denmead, O.; Simpson, J.; Obcemea, W. Effect of water depth on ammonia loss from lowland rice. Fert. Res. 1988, 16, 97–107. [Google Scholar] [CrossRef]
- Saichuk, J. Louisiana Rice Production Handbook; Louisiana State University Agricultural Center: Baton Rouge, LA, USA, 2009. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RTK Technique | Description | Data Connection |
|---|---|---|
| Conventional RTK | Uses a single base station to provide corrections to a rover receiver. | Radio link to base station |
| Virtual reference station (VRS) | Uses multiple base stations to create a virtual base station at a known location to provide corrections to rover receivers. | Network connection to networked transport of RTCM via Internet protocol (NTRIP) server |
| Real reference station (RRS) | Uses physical reference base stations with known coordinates to provide real-time correction data to rover receivers. | Network connection to NTRIP server |
| Precise integrated visual-RTK (PIV-RTK) | Uses a combination of real-time kinematic positioning from NTRIP caster, inertial sensors, visual odometry to achieve high-accuracy positioning, without the need for a base station. | Network connection to NTRIP caster with connection to NTRIP server |
| Precise Point Positioning (PPP)-RTK | Uses a precise clock and high-quality data from multiple GNSS satellites to calculate precise position, without the need for a base station. | Network connection to a server providing PPP correction data |
| Instrument | Study Site | Date | Weather/Wind Speed (m/s)/ Wind Direction/Temperature (°) | CRS of the Measured Data/ Additional Information |
|---|---|---|---|---|
| TS | S1 | 20 February 2019 | Cloudy/2.3/NE/22.0 | Arbitrary coordinate system/- |
| S2 | 21 January 2020 | Sunny/2.3/NE/9.7 | ||
| GNSS- receiver | S1 | 24 April 2019 | Cloudy/4.2/SSW/24.3 | world geodetic system (WGS) 84/RTK: VRS |
| S2 | 25 April 2019 | Sunny/1.5/ENE/22.7 | ||
| RTK-UAV | S2 | 30 April 2021 | Sunny/6/SW/22.9 | WGS 84/ Flight altitude: 100 m Flight speed: 6.7 m/s Forward overlap: 80 Side overlap: 75 RTK: VRS |
| S3 (F1) | 15 January 2021 19 March 2021 2 June 2021 | Sunny/0.5/NE/8.1 Cloudy/1.4/W/19.6 Cloudy/2.5/ESE/26.8 | ||
| S3 (F2) | 21 January 2022 9 June 2022 | Sunny/7.4/EWE/9.9 Sunny/0.4/NS/25.1 |
| Altitude from the Mean Value (cm) | Before the Land Leveling (a1) | After the First Land Leveling (b1) | After the Final Land Leveling (c1) |
|---|---|---|---|
| −20 to −15 | - | - | - |
| −15 to −10 | - | - | - |
| −10 to −5 | 3.4 | 2.6 | 0.8 |
| −5 to 0 | 55.2 | 53.9 | 34.0 |
| 0–5 | 23.4 | 29.1 | 64.6 |
| 5–10 | 12.9 | 12.0 | 0.4 |
| 10–15 | 4.4 | 2.2 | 0.2 |
| 15–20 | 0.2 | 0.1 | 0.1 |
| >20 | 0.5 | - | - |
| The percentage between [−5, 5] cm | 78.6 | 83.0 | 98.6 |
| The standard deviation of the ground altitudes (cm) | 4.4 | 3.9 | 2.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, S.; Takahashi, K.; Nakano, K.; Fukami, K.; Cho, W. Real-Time Kinematic Imagery-Based Automated Levelness Assessment System for Land Leveling. Agriculture 2023, 13, 657. https://doi.org/10.3390/agriculture13030657
Guan S, Takahashi K, Nakano K, Fukami K, Cho W. Real-Time Kinematic Imagery-Based Automated Levelness Assessment System for Land Leveling. Agriculture. 2023; 13(3):657. https://doi.org/10.3390/agriculture13030657
Chicago/Turabian StyleGuan, Senlin, Kimiyasu Takahashi, Keiko Nakano, Koichiro Fukami, and Wonjae Cho. 2023. "Real-Time Kinematic Imagery-Based Automated Levelness Assessment System for Land Leveling" Agriculture 13, no. 3: 657. https://doi.org/10.3390/agriculture13030657
APA StyleGuan, S., Takahashi, K., Nakano, K., Fukami, K., & Cho, W. (2023). Real-Time Kinematic Imagery-Based Automated Levelness Assessment System for Land Leveling. Agriculture, 13(3), 657. https://doi.org/10.3390/agriculture13030657