
Global Navigation Satellite Systems as State-of-the-Art Solutions in Precision Agriculture: A Review of Studies Indexed in the Web of Science




Abstract
:1. Introduction
2. Methodology of WoSCC Search for Literature Review
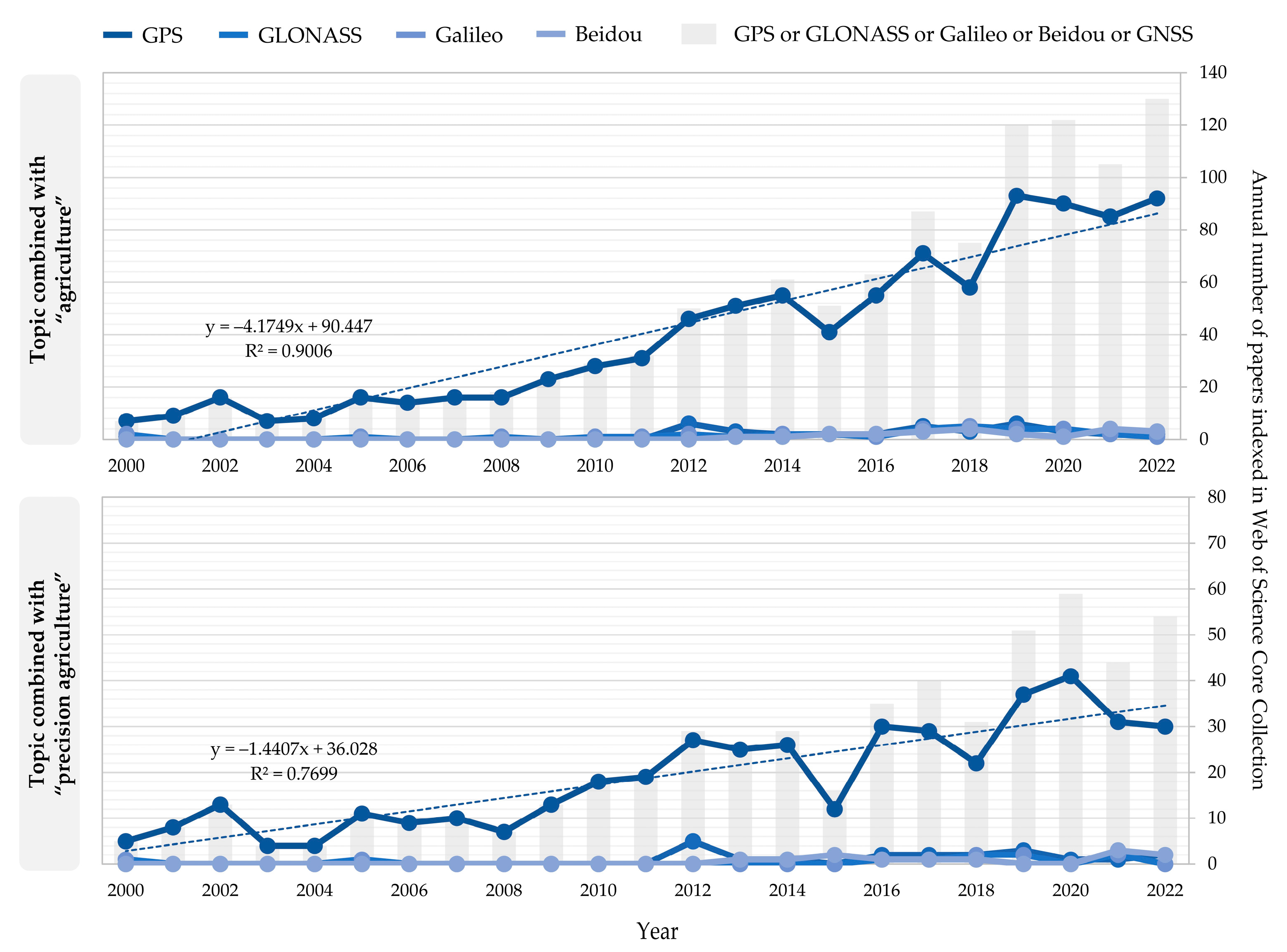
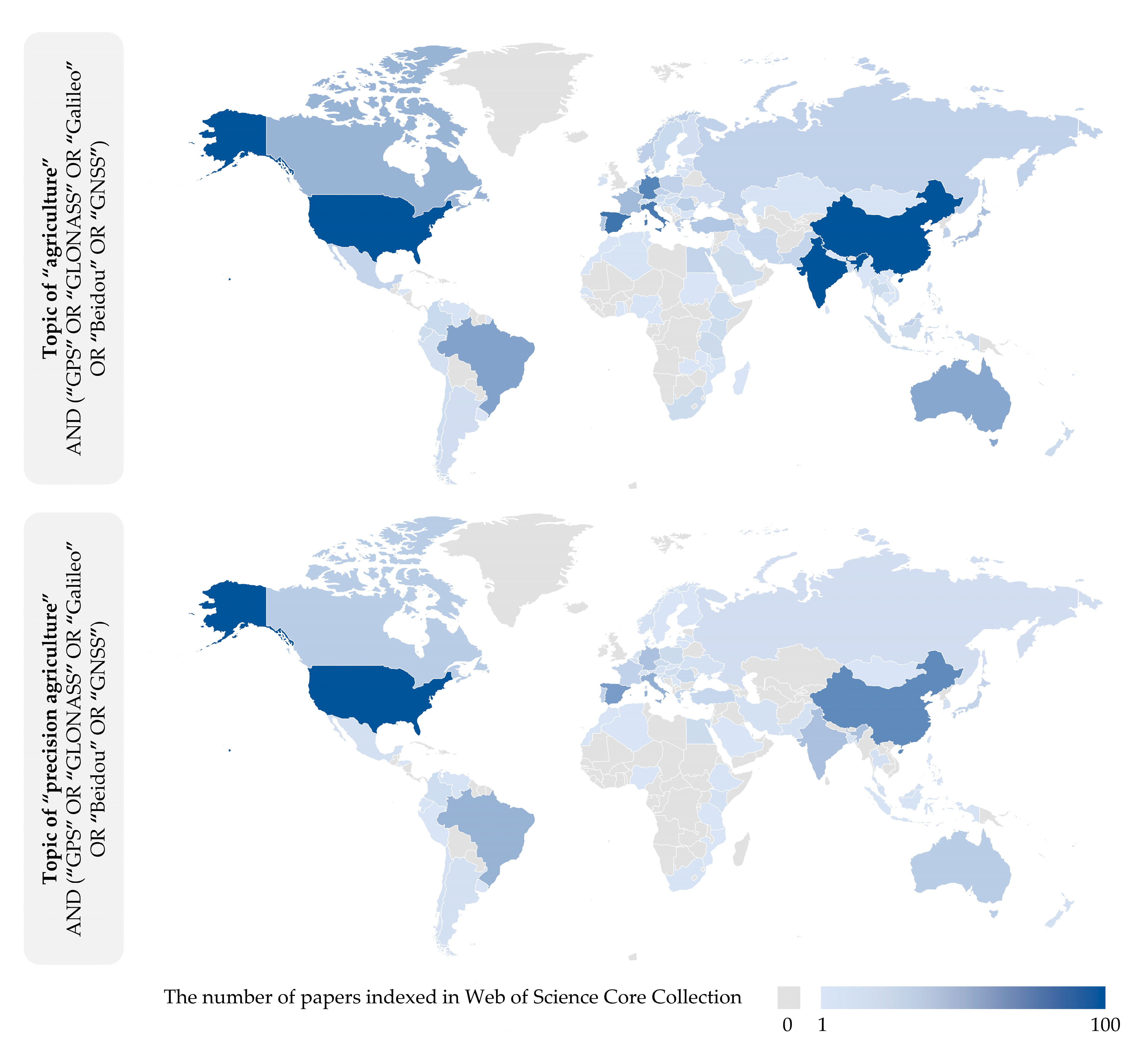
3. State of GNSS in Scientific Studies Indexed in WoSCC Related to PA
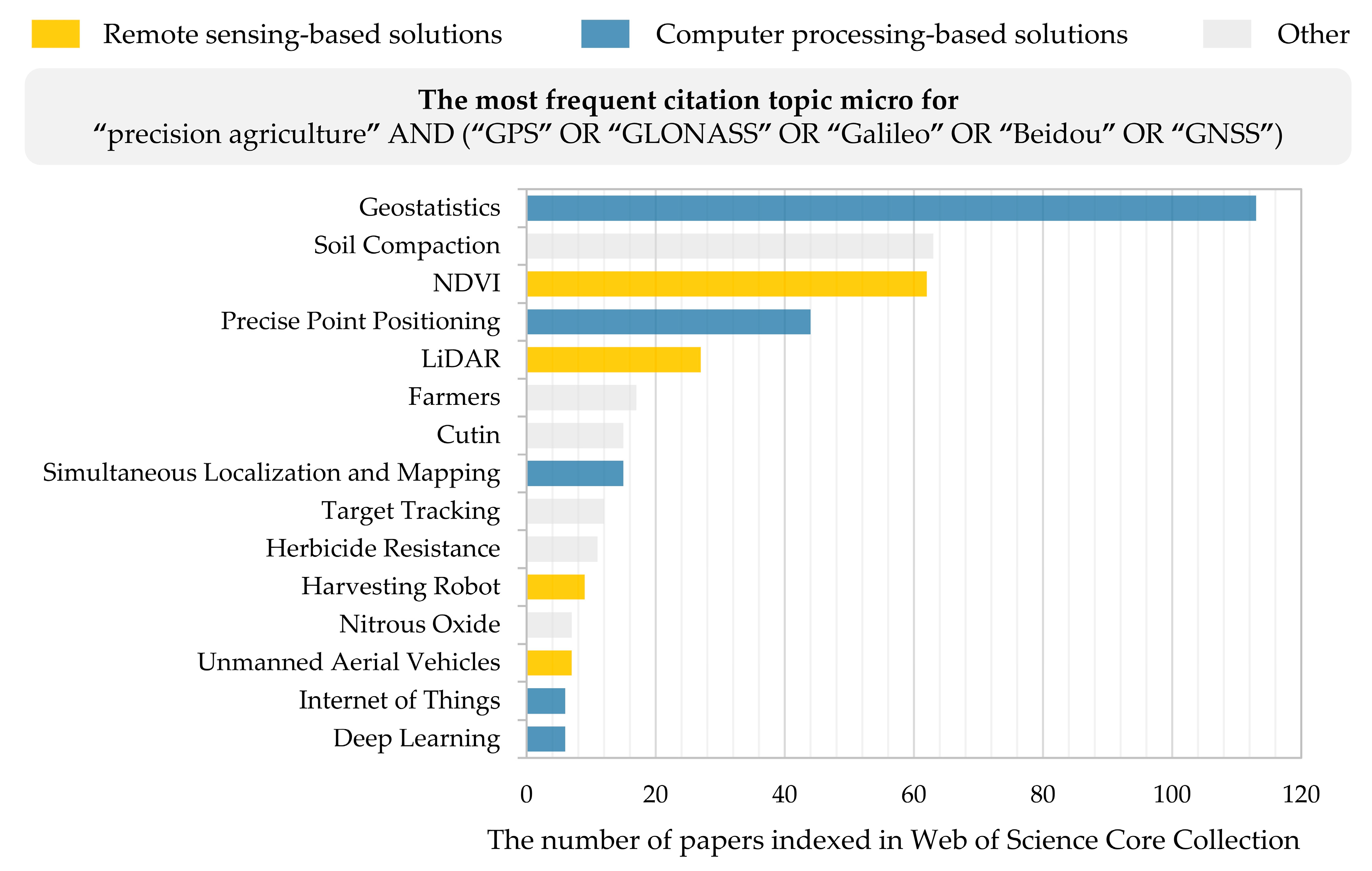
4. GNSS in State-of-the-Art Remote Sensing-Based Solutions in PA
4.1. NDVI
4.2. LiDAR
4.3. Harvesting Robot
4.4. Unmanned Aerial Vehicles
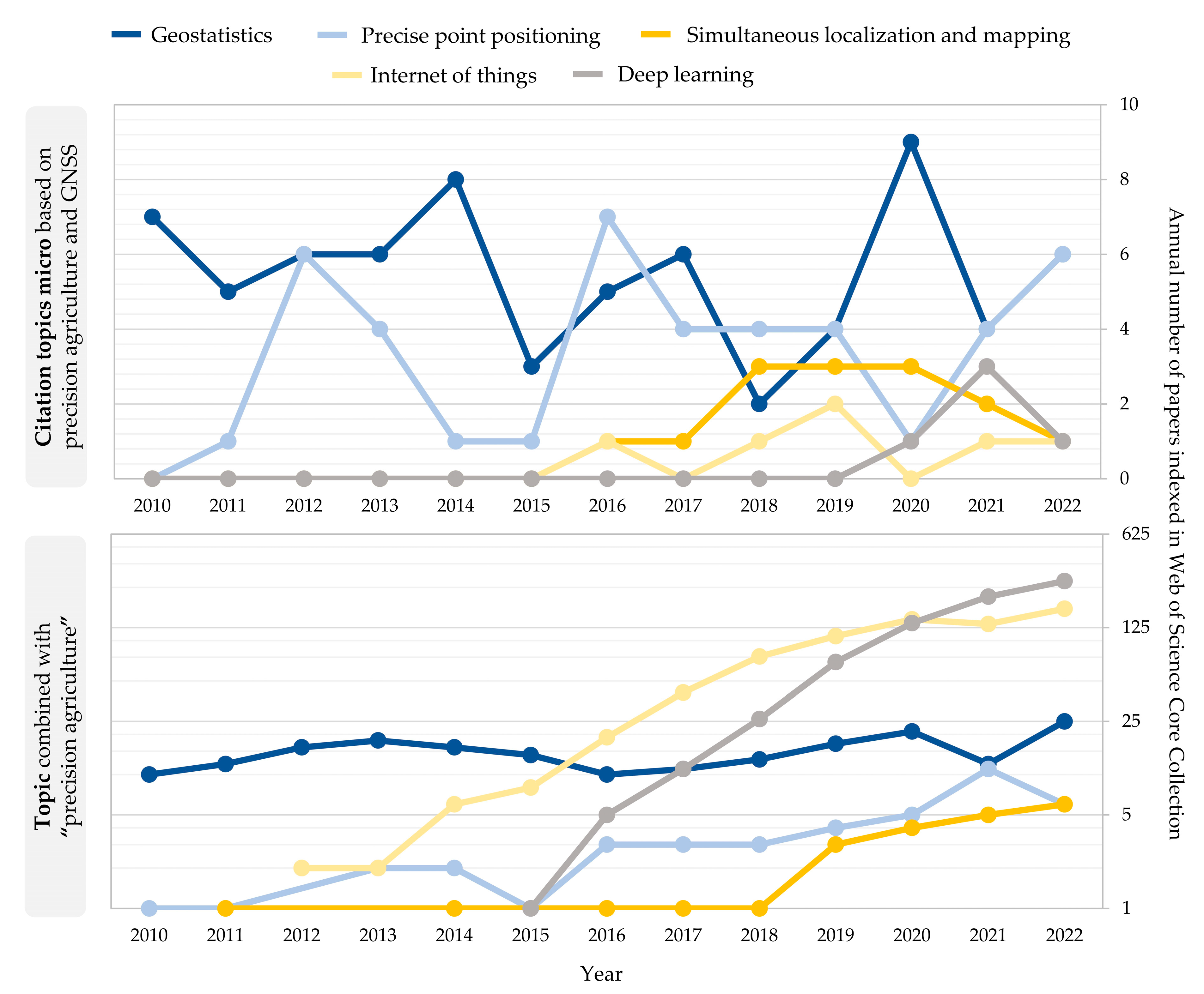
5. GNSS in State-of-the-Art Computer Processing-Based Solutions in PA
5.1. Geostatistics
5.2. Precise Point Positioning
5.3. Simultaneous Localization and Mapping
5.4. Internet of Things
5.5. Deep Learning
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Shannon, D.; Clay, D.E.; Sudduth, K.A. An Introduction to Precision Agriculture. In Precision Agriculture Basics; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2018; pp. 1–12. ISBN 978-0-89118-367-9. [Google Scholar]
- Kumar, P.; Srivastava, P.K.; Tiwari, P.; Mall, R.K. Chapter 20—Application of GPS and GNSS Technology in Geosciences. In GPS and GNSS Technology in Geosciences; Petropoulos, G.P., Srivastava, P.K., Eds.; Elsevier: Amsterdam, The Netherlands, 2021; pp. 415–427. ISBN 978-0-12-818617-6. [Google Scholar]
- Catania, P.; Comparetti, A.; Febo, P.; Morello, G.; Orlando, S.; Roma, E.; Vallone, M. Positioning Accuracy Comparison of GNSS Receivers Used for Mapping and Guidance of Agricultural Machines. Agronomy 2020, 10, 924. [Google Scholar] [CrossRef]
- Radočaj, D.; Plaščak, I.; Heffer, G.; Jurišić, M. A Low-Cost Global Navigation Satellite System Positioning Accuracy Assessment Method for Agricultural Machinery. Appl. Sci. 2022, 12, 693. [Google Scholar] [CrossRef]
- Radicioni, F.; Stoppini, A.; Brigante, R.; Brozzi, A.; Tosi, G. GNSS Network RTK for Automatic Guidance in Agriculture: Testing and Performance Evaluation. In Computational Science and Its Applications—ICCSA 2020, Proceedings of the 20th International Conference, Cagliari, Italy, 1–4 July 2020; Gervasi, O., Murgante, B., Misra, S., Garau, C., Blečić, I., Taniar, D., Apduhan, B.O., Rocha, A.M.A.C., Tarantino, E., Torre, C.M., et al., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 19–35. [Google Scholar]
- Perez-Ruiz, M.; Martínez-Guanter, J.; Upadhyaya, S.K. Chapter 15—High-Precision GNSS for Agricultural Operations. In GPS and GNSS Technology in Geosciences; Petropoulos, G.P., Srivastava, P.K., Eds.; Elsevier: Amsterdam, The Netherlands, 2021; pp. 299–335. ISBN 978-0-12-818617-6. [Google Scholar]
- Liu, R.; Sun, Y.; Li, M.; Zhang, M.; Zhang, Z.; Li, H.; Yang, W. Development and Application Experiments of a Grain Yield Monitoring System. Comput. Electron. Agric. 2022, 195, 106851. [Google Scholar] [CrossRef]
- Neupane, J.; Guo, W. Agronomic Basis and Strategies for Precision Water Management: A Review. Agronomy 2019, 9, 87. [Google Scholar] [CrossRef] [Green Version]
- Saiz-Rubio, V.; Rovira-Más, F. From Smart Farming towards Agriculture 5.0: A Review on Crop Data Management. Agronomy 2020, 10, 207. [Google Scholar] [CrossRef] [Green Version]
- Fu, J.; Ji, C.; Liu, H.; Wang, W.; Zhang, G.; Gao, Y.; Zhou, Y.; Abdeen, M.A. Research Progress and Prospect of Mechanized Harvesting Technology in the First Season of Ratoon Rice. Agriculture 2022, 12, 620. [Google Scholar] [CrossRef]
- Rokhafrouz, M.; Latifi, H.; Abkar, A.A.; Wojciechowski, T.; Czechlowski, M.; Naieni, A.S.; Maghsoudi, Y.; Niedbała, G. Simplified and Hybrid Remote Sensing-Based Delineation of Management Zones for Nitrogen Variable Rate Application in Wheat. Agriculture 2021, 11, 1104. [Google Scholar] [CrossRef]
- Ammoniaci, M.; Kartsiotis, S.-P.; Perria, R.; Storchi, P. State of the Art of Monitoring Technologies and Data Processing for Precision Viticulture. Agriculture 2021, 11, 201. [Google Scholar] [CrossRef]
- Yang, L.; Wang, X.; Li, Y.; Xie, Z.; Xu, Y.; Han, R.; Wu, C. Identifying Working Trajectories of the Wheat Harvester In-Field Based on K-Means Algorithm. Agriculture 2022, 12, 1837. [Google Scholar] [CrossRef]
- dela Torre, D.M.G.; Gao, J.; Macinnis-Ng, C. Remote Sensing-Based Estimation of Rice Yields Using Various Models: A Critical Review. Geo-Spat. Inf. Sci. 2021, 24, 580–603. [Google Scholar] [CrossRef]
- Vargas, J.; Alsweiss, S.; Toker, O.; Razdan, R.; Santos, J. An Overview of Autonomous Vehicles Sensors and Their Vulnerability to Weather Conditions. Sensors 2021, 21, 5397. [Google Scholar] [CrossRef]
- Gao, Y.; Li, G. A New GNSS Spoofing Signal Power Control Algorithm for Receiver Sensors in Acquisition Phase and Subsequent Control. Sensors 2022, 22, 6588. [Google Scholar] [CrossRef]
- Xue, Z.; Lu, Z.; Xiao, Z.; Song, J.; Ni, S. Overview of Multipath Mitigation Technology in Global Navigation Satellite System. Front. Phys. 2022, 10, 1071539. [Google Scholar] [CrossRef]
- Tantalaki, N.; Souravlas, S.; Roumeliotis, M. Data-Driven Decision Making in Precision Agriculture: The Rise of Big Data in Agricultural Systems. J. Agric. Food Inf. 2019, 20, 344–380. [Google Scholar] [CrossRef]
- Behrens, T.; Schmidt, K.; MacMillan, R.A.; Viscarra Rossel, R.A. Multi-Scale Digital Soil Mapping with Deep Learning. Sci. Rep. 2018, 8, 15244. [Google Scholar] [CrossRef] [Green Version]
- Jeppesen, J.H.; Ebeid, E.; Jacobsen, R.H.; Toftegaard, T.S. Open Geospatial Infrastructure for Data Management and Analytics in Interdisciplinary Research. Comput. Electron. Agric. 2018, 145, 130–141. [Google Scholar] [CrossRef]
- Moselhi, O.; Bardareh, H.; Zhu, Z. Automated Data Acquisition in Construction with Remote Sensing Technologies. Appl. Sci. 2020, 10, 2846. [Google Scholar] [CrossRef] [Green Version]
- Ammann, J.; Umstätter, C.; El Benni, N. The Adoption of Precision Agriculture Enabling Technologies in Swiss Outdoor Vegetable Production: A Delphi Study. Precis. Agric. 2022, 23, 1354–1374. [Google Scholar] [CrossRef]
- Botta, A.; Cavallone, P.; Baglieri, L.; Colucci, G.; Tagliavini, L.; Quaglia, G. A Review of Robots, Perception, and Tasks in Precision Agriculture. Appl. Mech. 2022, 3, 830–854. [Google Scholar] [CrossRef]
- Singh, A.P.; Yerudkar, A.; Mariani, V.; Iannelli, L.; Glielmo, L. A Bibliometric Review of the Use of Unmanned Aerial Vehicles in Precision Agriculture and Precision Viticulture for Sensing Applications. Remote Sens. 2022, 14, 1604. [Google Scholar] [CrossRef]
- Loures, L.; Chamizo, A.; Ferreira, P.; Loures, A.; Castanho, R.; Panagopoulos, T. Assessing the Effectiveness of Precision Agriculture Management Systems in Mediterranean Small Farms. Sustainability 2020, 12, 3765. [Google Scholar] [CrossRef]
- Zhu, J.; Liu, W. A Tale of Two Databases: The Use of Web of Science and Scopus in Academic Papers. Scientometrics 2020, 123, 321–335. [Google Scholar] [CrossRef] [Green Version]
- Web of Science Core Collection. Available online: https://webofscience.help.clarivate.com/Content/wos-core-collection/wos-core-collection.htm (accessed on 10 July 2023).
- Thoelert, S.; Steigenberger, P.; Montenbruck, O.; Meurer, M. Signal Analysis of the First GPS III Satellite. GPS Solut. 2019, 23, 92. [Google Scholar] [CrossRef]
- Hein, G.W. Status, Perspectives and Trends of Satellite Navigation. Satell. Navig. 2020, 1, 22. [Google Scholar] [CrossRef]
- Wang, M.; Lu, X.; Rao, Y. GNSS Signal Distortion Estimation: A Comparative Analysis of L5 Signal from GPS II and GPS III. Appl. Sci. 2022, 12, 3791. [Google Scholar] [CrossRef]
- Duan, B.; Hugentobler, U.; Hofacker, M.; Selmke, I. Improving Solar Radiation Pressure Modeling for GLONASS Satellites. J. Geod. 2020, 94, 72. [Google Scholar] [CrossRef]
- Wu, J.; Li, X.; Yuan, Y.; Li, X.; Zheng, H.; Zhang, W. Estimation of GLONASS Inter-Frequency Clock Bias Considering the Phase Center Offset Differences on the L3 Signal. GPS Solut. 2023, 27, 130. [Google Scholar] [CrossRef]
- Ogutcu, S. Assessing the Contribution of Galileo to GPS+GLONASS PPP: Towards Full Operational Capability. Measurement 2020, 151, 107143. [Google Scholar] [CrossRef]
- Fernandez-Hernandez, I.; Chamorro-Moreno, A.; Cancela-Diaz, S.; Calle-Calle, J.D.; Zoccarato, P.; Blonski, D.; Senni, T.; de Blas, F.J.; Hernández, C.; Simón, J.; et al. Galileo High Accuracy Service: Initial Definition and Performance. GPS Solut. 2022, 26, 65. [Google Scholar] [CrossRef]
- Wang, N.; Li, Z.; Montenbruck, O.; Tang, C. Quality Assessment of GPS, Galileo and BeiDou-2/3 Satellite Broadcast Group Delays. Adv. Space Res. 2019, 64, 1764–1779. [Google Scholar] [CrossRef]
- Wang, M.; Wang, J.; Dong, D.; Meng, L.; Chen, J.; Wang, A.; Cui, H. Performance of BDS-3: Satellite Visibility and Dilution of Precision. GPS Solut. 2019, 23, 56. [Google Scholar] [CrossRef]
- Yang, Y.; Gao, W.; Guo, S.; Mao, Y.; Yang, Y. Introduction to BeiDou-3 Navigation Satellite System. Navigation 2019, 66, 7–18. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Chen, H.; Song, C.; Wang, Y.; Yuan, P.; Geng, T.; Jiang, W. Beidou-3 Precise Point Positioning Ambiguity Resolution with B1I/B3I/B1C/B2a/B2b Phase Observable-Specific Signal Bias and Satellite B1I/B3I Legacy Clock. Adv. Space Res. 2023, 72, 488–502. [Google Scholar] [CrossRef]
- Onyango, C.M.; Nyaga, J.M.; Wetterlind, J.; Söderström, M.; Piikki, K. Precision Agriculture for Resource Use Efficiency in Smallholder Farming Systems in Sub-Saharan Africa: A Systematic Review. Sustainability 2021, 13, 1158. [Google Scholar] [CrossRef]
- Lowenberg-DeBoer, J.; Erickson, B. Setting the Record Straight on Precision Agriculture Adoption. Agron. J. 2019, 111, 1552–1569. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Li, X.; Li, Z.; Hu, L.; Yang, G.; Zhao, C.; Fairbairn, D.; Watson, D.; Ge, M. Multi-GNSS Precise Point Positioning for Precision Agriculture. Precis. Agric. 2018, 19, 895–911. [Google Scholar] [CrossRef] [Green Version]
- Jin, S.; Wang, Q.; Dardanelli, G. A Review on Multi-GNSS for Earth Observation and Emerging Applications. Remote Sens. 2022, 14, 3930. [Google Scholar] [CrossRef]
- Tomaštík, J.; Everett, T. Static Positioning under Tree Canopy Using Low-Cost GNSS Receivers and Adapted RTKLIB Software. Sensors 2023, 23, 3136. [Google Scholar] [CrossRef]
- Magalhães, A.; Bastos, L.; Maia, D.; Gonçalves, J.A. Relative Positioning in Remote Areas Using a GNSS Dual Frequency Smartphone. Sensors 2021, 21, 8354. [Google Scholar] [CrossRef]
- Li, S.; Zhang, M.; Ji, Y.; Zhang, Z.; Cao, R.; Chen, B.; Li, H.; Yin, Y. Agricultural Machinery GNSS/IMU-Integrated Navigation Based on Fuzzy Adaptive Finite Impulse Response Kalman Filtering Algorithm. Comput. Electron. Agric. 2021, 191, 106524. [Google Scholar] [CrossRef]
- Yuan, W.; Choi, D.; Bolkas, D. GNSS-IMU-Assisted Colored ICP for UAV-LiDAR Point Cloud Registration of Peach Trees. Comput. Electron. Agric. 2022, 197, 106966. [Google Scholar] [CrossRef]
- Yan, Y.; Zhang, B.; Zhou, J.; Zhang, Y.; Liu, X. Real-Time Localization and Mapping Utilizing Multi-Sensor Fusion and Visual–IMU–Wheel Odometry for Agricultural Robots in Unstructured, Dynamic and GPS-Denied Greenhouse Environments. Agronomy 2022, 12, 1740. [Google Scholar] [CrossRef]
- Causa, F.; Asciolla, M.; Opromolla, R.; Molina, P.; Mennella, A.; Nisi, M.; Fasano, G. UAV-Based LiDAR Mapping with Galileo-GPS PPP Processing and Cooperative Navigation. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 938–947. [Google Scholar]
- Wang, L.; Li, Z.; Wang, N.; Wang, Z. Real-Time GNSS Precise Point Positioning for Low-Cost Smart Devices. GPS Solut. 2021, 25, 69. [Google Scholar] [CrossRef]
- Liu, K.; Cheng, G.; Kong, Z. Beidou Agricultural Machinery Automatic Driving Software Design. In Proceedings of the 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 20–22 December 2019; Volume 1, pp. 1770–1775. [Google Scholar]
- Šugar, D.; Kliman, A.; Bačić, Ž.; Nevistić, Z. Assessment of GNSS Galileo Contribution to the Modernization of CROPOS’s Services. Sensors 2023, 23, 2466. [Google Scholar] [CrossRef]
- Roma, E.; Laudicina, V.A.; Vallone, M.; Catania, P. Application of Precision Agriculture for the Sustainable Management of Fertilization in Olive Groves. Agronomy 2023, 13, 324. [Google Scholar] [CrossRef]
- Vinci, A.; Brigante, R.; Traini, C.; Farinelli, D. Geometrical Characterization of Hazelnut Trees in an Intensive Orchard by an Unmanned Aerial Vehicle (UAV) for Precision Agriculture Applications. Remote Sens. 2023, 15, 541. [Google Scholar] [CrossRef]
- Ozer Yigit, C.; Bezcioglu, M.; Ilci, V.; Murat Ozulu, I.; Metin Alkan, R.; Anil Dindar, A.; Karadeniz, B. Assessment of Real-Time PPP with Trimble RTX Correction Service for Real-Time Dynamic Displacement Monitoring Based on High-Rate GNSS Observations. Measurement 2022, 201, 111704. [Google Scholar] [CrossRef]
- Kharel, T.P.; Ashworth, A.J.; Owens, P.R. Evaluating How Operator Experience Level Affects Efficiency Gains for Precision Agricultural Tools. Agric. Environ. Lett. 2022, 7, e20085. [Google Scholar] [CrossRef]
- Radočaj, D.; Šiljeg, A.; Marinović, R.; Jurišić, M. State of Major Vegetation Indices in Precision Agriculture Studies Indexed in Web of Science: A Review. Agriculture 2023, 13, 707. [Google Scholar] [CrossRef]
- Lu, W.; Okayama, T.; Komatsuzaki, M. Rice Height Monitoring between Different Estimation Models Using UAV Photogrammetry and Multispectral Technology. Remote Sens. 2022, 14, 78. [Google Scholar] [CrossRef]
- Segarra, J.; Buchaillot, M.L.; Araus, J.L.; Kefauver, S.C. Remote Sensing for Precision Agriculture: Sentinel-2 Improved Features and Applications. Agronomy 2020, 10, 641. [Google Scholar] [CrossRef]
- Ahmad, L.; Mahdi, S.S. Tool and Technologies in Precision Agriculture. In Satellite Farming: An Information and Technology Based Agriculture; Ahmad, L., Mahdi, S.S., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 31–45. ISBN 978-3-030-03448-1. [Google Scholar]
- Radocaj, D.; Jurisic, M.; Gasparovic, M.; Plascak, I. Optimal Soybean (Glycine max L.) Land Suitability Using GIS-Based Multicriteria Analysis and Sentinel-2 Multitemporal Images. Remote Sens. 2020, 12, 1463. [Google Scholar] [CrossRef]
- Pallottino, F.; Antonucci, F.; Costa, C.; Bisaglia, C.; Figorilli, S.; Menesatti, P. Optoelectronic Proximal Sensing Vehicle-Mounted Technologies in Precision Agriculture: A Review. Comput. Electron. Agric. 2019, 162, 859–873. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, C.; Yang, C.; Jiang, Z.; Zhou, G.; Wang, B.; Shi, Y.; Zhang, D.; You, L.; Xie, J. Evaluation of a UAV-Mounted Consumer Grade Camera with Different Spectral Modifications and Two Handheld Spectral Sensors for Rapeseed Growth Monitoring: Performance and Influencing Factors. Precis. Agric. 2020, 21, 1092–1120. [Google Scholar] [CrossRef]
- Banerjee, B.P.; Spangenberg, G.; Kant, S. Fusion of Spectral and Structural Information from Aerial Images for Improved Biomass Estimation. Remote Sens. 2020, 12, 3164. [Google Scholar] [CrossRef]
- Ravi, R.; Shamseldin, T.; Elbahnasawy, M.; Lin, Y.-J.; Habib, A. Bias Impact Analysis and Calibration of UAV-Based Mobile LiDAR System with Spinning Multi-Beam Laser Scanner. Appl. Sci. 2018, 8, 297. [Google Scholar] [CrossRef] [Green Version]
- Mandlburger, G.; Pfennigbauer, M.; Schwarz, R.; Flöry, S.; Nussbaumer, L. Concept and Performance Evaluation of a Novel UAV-Borne Topo-Bathymetric LiDAR Sensor. Remote Sens. 2020, 12, 986. [Google Scholar] [CrossRef] [Green Version]
- Hariz, F.; Bouslimani, Y.; Ghribi, M. High-Resolution Mobile Mapping Platform Using 15-mm Accuracy LiDAR and SPAN/TerraStar C-PRO Technologies. IEEE J. Miniaturization Air Space Syst. 2023, 4, 122–135. [Google Scholar] [CrossRef]
- Esser, F.; Klingbeil, L.; Zabawa, L.; Kuhlmann, H. Quality Analysis of a High-Precision Kinematic Laser Scanning System for the Use of Spatio-Temporal Plant and Organ-Level Phenotyping in the Field. Remote Sens. 2023, 15, 1117. [Google Scholar] [CrossRef]
- Kootstra, G.; Wang, X.; Blok, P.M.; Hemming, J.; van Henten, E. Selective Harvesting Robotics: Current Research, Trends, and Future Directions. Curr. Robot. Rep. 2021, 2, 95–104. [Google Scholar] [CrossRef]
- Karkee, M.; Zhang, Q.; Silwal, A. Agricultural Robots for Precision Agricultural Tasks in Tree Fruit Orchards. In Innovation in Agricultural Robotics for Precision Agriculture: A Roadmap for Integrating Robots in Precision Agriculture; Bechar, A., Ed.; Progress in Precision Agriculture; Springer International Publishing: Cham, Switzerland, 2021; pp. 63–89. ISBN 978-3-030-77036-5. [Google Scholar]
- Mavridou, E.; Vrochidou, E.; Papakostas, G.A.; Pachidis, T.; Kaburlasos, V.G. Machine Vision Systems in Precision Agriculture for Crop Farming. J. Imaging 2019, 5, 89. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, M.; Xu, L.; Chen, X.; Ji, Z.; Zheng, Y.; Jia, W. BFP Net: Balanced Feature Pyramid Network for Small Apple Detection in Complex Orchard Environment. Plant Phenomics 2022, 2022, 9892464. [Google Scholar] [CrossRef] [PubMed]
- Gašparović, M.; Zrinjski, M.; Barković, Đ.; Radočaj, D. An Automatic Method for Weed Mapping in Oat Fields Based on UAV Imagery. Comput. Electron. Agric. 2020, 173, 105385. [Google Scholar] [CrossRef]
- Xu, R.; Li, C.; Bernardes, S. Development and Testing of a UAV-Based Multi-Sensor System for Plant Phenotyping and Precision Agriculture. Remote Sens. 2021, 13, 3517. [Google Scholar] [CrossRef]
- Famiglietti, N.A.; Cecere, G.; Grasso, C.; Memmolo, A.; Vicari, A. A Test on the Potential of a Low Cost Unmanned Aerial Vehicle RTK/PPK Solution for Precision Positioning. Sensors 2021, 21, 3882. [Google Scholar] [CrossRef]
- Merz, M.; Pedro, D.; Skliros, V.; Bergenhem, C.; Himanka, M.; Houge, T.; Matos-Carvalho, J.P.; Lundkvist, H.; Cürüklü, B.; Hamrén, R.; et al. Autonomous UAS-Based Agriculture Applications: General Overview and Relevant European Case Studies. Drones 2022, 6, 128. [Google Scholar] [CrossRef]
- Aslan, M.F.; Durdu, A.; Sabanci, K.; Ropelewska, E.; Gültekin, S.S. A Comprehensive Survey of the Recent Studies with UAV for Precision Agriculture in Open Fields and Greenhouses. Appl. Sci. 2022, 12, 1047. [Google Scholar] [CrossRef]
- Biglia, A.; Grella, M.; Bloise, N.; Comba, L.; Mozzanini, E.; Sopegno, A.; Pittarello, M.; Dicembrini, E.; Alcatrão, L.E.; Guglieri, G.; et al. UAV-Spray Application in Vineyards: Flight Modes and Spray System Adjustment Effects on Canopy Deposit, Coverage, and off-Target Losses. Sci. Total Environ. 2022, 845, 157292. [Google Scholar] [CrossRef]
- Costa, L.; Kunwar, S.; Ampatzidis, Y.; Albrecht, U. Determining Leaf Nutrient Concentrations in Citrus Trees Using UAV Imagery and Machine Learning. Precis. Agric. 2022, 23, 854–875. [Google Scholar] [CrossRef]
- Oliver, M.A.; Webster, R. A Tutorial Guide to Geostatistics: Computing and Modelling Variograms and Kriging. Catena 2014, 113, 56–69. [Google Scholar] [CrossRef]
- Hengl, T.; Heuvelink, G.B.M.; Stein, A. A Generic Framework for Spatial Prediction of Soil Variables Based on Regression-Kriging. Geoderma 2004, 120, 75–93. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Chen, Y.; Wu, Z.; Wang, B.; Wang, S. Geographical Detector-Based Stratified Regression Kriging Strategy for Mapping Soil Organic Carbon with High Spatial Heterogeneity. Catena 2021, 196, 104953. [Google Scholar] [CrossRef]
- Radočaj, D.; Jurišić, M.; Antonić, O.; Šiljeg, A.; Cukrov, N.; Rapčan, I.; Plaščak, I.; Gašparović, M. A Multiscale Cost–Benefit Analysis of Digital Soil Mapping Methods for Sustainable Land Management. Sustainability 2022, 14, 12170. [Google Scholar] [CrossRef]
- Vogel, S.; Bönecke, E.; Kling, C.; Kramer, E.; Lück, K.; Philipp, G.; Rühlmann, J.; Schröter, I.; Gebbers, R. Direct Prediction of Site-Specific Lime Requirement of Arable Fields Using the Base Neutralizing Capacity and a Multi-Sensor Platform for on-the-Go Soil Mapping. Precis. Agric. 2022, 23, 127–149. [Google Scholar] [CrossRef]
- Jiménez-Jiménez, S.I.; Ojeda-Bustamante, W.; Marcial-Pablo, M.d.J.; Enciso, J. Digital Terrain Models Generated with Low-Cost UAV Photogrammetry: Methodology and Accuracy. ISPRS Int. J. Geo-Inf. 2021, 10, 285. [Google Scholar] [CrossRef]
- Waqas, H.; Lu, L.; Tariq, A.; Li, Q.; Baqa, M.F.; Xing, J.; Sajjad, A. Flash Flood Susceptibility Assessment and Zonation Using an Integrating Analytic Hierarchy Process and Frequency Ratio Model for the Chitral District, Khyber Pakhtunkhwa, Pakistan. Water 2021, 13, 1650. [Google Scholar] [CrossRef]
- Adhikari, K.; Smith, D.R.; Hajda, C.; Kharel, T.P. Within-Field Yield Stability and Gross Margin Variations across Corn Fields and Implications for Precision Conservation. Precis. Agric. 2023, 24, 1401–1416. [Google Scholar] [CrossRef]
- Jurišić, M.; Radočaj, D.; Plaščak, I.; Rapčan, I. A Comparison of Precise Fertilization Prescription Rates to a Conventional Approach Based on the Open Source Gis Software. Poljoprivreda 2021, 27, 52–59. [Google Scholar] [CrossRef]
- Khanna, M.; Atallah, S.S.; Kar, S.; Sharma, B.; Wu, L.; Yu, C.; Chowdhary, G.; Soman, C.; Guan, K. Digital Transformation for a Sustainable Agriculture in the United States: Opportunities and Challenges. Agric. Econ. 2022, 53, 924–937. [Google Scholar] [CrossRef]
- Hu, W.; Neupane, A.; Farrell, J.A. Using PPP Information to Implement a Global Real-Time Virtual Network DGNSS Approach. IEEE Trans. Veh. Technol. 2022, 71, 10337–10349. [Google Scholar] [CrossRef]
- Zhang, X.; Ren, X.; Chen, J.; Zuo, X.; Mei, D.; Liu, W. Investigating GNSS PPP–RTK with External Ionospheric Constraints. Satell. Navig. 2022, 3, 6. [Google Scholar] [CrossRef]
- Privitera, S.; Manetto, G.; Pascuzzi, S.; Pessina, D.; Cerruto, E. Drop Size Measurement Techniques for Agricultural Sprays:A State-of-The-Art Review. Agronomy 2023, 13, 678. [Google Scholar] [CrossRef]
- MacEachern, C.B.; Esau, T.J.; Zaman, Q.U.; Farooque, A.A. Assessing the Effect of Machine Automation on Operator Heart and Breathing Rate during Mechanical Harvesting of Wild Blueberries. Smart Agric. Technol. 2023, 4, 100171. [Google Scholar] [CrossRef]
- Esau, T.J.; MacEachern, C.B.; Farooque, A.A.; Zaman, Q.U. Evaluation of Autosteer in Rough Terrain at Low Ground Speed for Commercial Wild Blueberry Harvesting. Agronomy 2021, 11, 384. [Google Scholar] [CrossRef]
- Fue, K.G.; Porter, W.M.; Barnes, E.M.; Rains, G.C. An Extensive Review of Mobile Agricultural Robotics for Field Operations: Focus on Cotton Harvesting. AgriEngineering 2020, 2, 150–174. [Google Scholar] [CrossRef] [Green Version]
- Ding, H.; Zhang, B.; Zhou, J.; Yan, Y.; Tian, G.; Gu, B. Recent Developments and Applications of Simultaneous Localization and Mapping in Agriculture. J. Field Robot. 2022, 39, 956–983. [Google Scholar] [CrossRef]
- Beloev, I.; Kinaneva, D.; Georgiev, G.; Hristov, G.; Zahariev, P. Artificial Intelligence-Driven Autonomous Robot for Precision Agriculture. Acta Technol. Agric. 2021, 24, 48–54. [Google Scholar] [CrossRef]
- Li, Y.; Li, J.; Zhou, W.; Yao, Q.; Nie, J.; Qi, X. Robot Path Planning Navigation for Dense Planting Red Jujube Orchards Based on the Joint Improved A* and DWA Algorithms under Laser SLAM. Agriculture 2022, 12, 1445. [Google Scholar] [CrossRef]
- Bala, J.A.; Adeshina, S.A.; Aibinu, A.M. Advances in Visual Simultaneous Localisation and Mapping Techniques for Autonomous Vehicles: A Review. Sensors 2022, 22, 8943. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Ayaz, M.; Ammad-Uddin, M.; Sharif, Z.; Mansour, A.; Aggoune, E.-H.M. Internet-of-Things (IoT)-Based Smart Agriculture: Toward Making the Fields Talk. IEEE Access 2019, 7, 129551–129583. [Google Scholar] [CrossRef]
- Chandra Pandey, P.; Tripathi, A.K.; Sharma, J.K. Chapter 16—An Evaluation of GPS Opportunity in Market for Precision Agriculture. In GPS and GNSS Technology in Geosciences; Petropoulos, G.P., Srivastava, P.K., Eds.; Elsevier: Amsterdam, The Netherlands, 2021; pp. 337–349. ISBN 978-0-12-818617-6. [Google Scholar]
- Feng, X.; Yan, F.; Liu, X. Study of Wireless Communication Technologies on Internet of Things for Precision Agriculture. Wirel. Pers. Commun. 2019, 108, 1785–1802. [Google Scholar] [CrossRef]
- Monteiro, A.; Santos, S.; Gonçalves, P. Precision Agriculture for Crop and Livestock Farming—Brief Review. Animals 2021, 11, 2345. [Google Scholar] [CrossRef]
- Alshehri, M. Blockchain-Assisted Internet of Things Framework in Smart Livestock Farming. Internet Things 2023, 22, 100739. [Google Scholar] [CrossRef]
- Darwin, B.; Dharmaraj, P.; Prince, S.; Popescu, D.E.; Hemanth, D.J. Recognition of Bloom/Yield in Crop Images Using Deep Learning Models for Smart Agriculture: A Review. Agronomy 2021, 11, 646. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Hoang, T.D.; Pham, M.T.; Vu, T.T.; Nguyen, T.H.; Huynh, Q.-T.; Jo, J. Monitoring Agriculture Areas with Satellite Images and Deep Learning. Appl. Soft Comput. 2020, 95, 106565. [Google Scholar] [CrossRef]
- Ampatzidis, Y.; De Bellis, L.; Luvisi, A. IPathology: Robotic Applications and Management of Plants and Plant Diseases. Sustainability 2017, 9, 1010. [Google Scholar] [CrossRef] [Green Version]
- Borhani-Darian, P.; Li, H.; Wu, P.; Closas, P. Deep Learning of GNSS Acquisition. Sensors 2023, 23, 1566. [Google Scholar] [CrossRef]
- Aguiar, A.S.; Dos Santos, F.N.; Miranda De Sousa, A.J.; Oliveira, P.M.; Santos, L.C. Visual Trunk Detection Using Transfer Learning and a Deep Learning-Based Coprocessor. IEEE Access 2020, 8, 77308–77320. [Google Scholar] [CrossRef]
- Ukaegbu, U.F.; Tartibu, L.K.; Okwu, M.O.; Olayode, I.O. Development of a Light-Weight Unmanned Aerial Vehicle for Precision Agriculture. Sensors 2021, 21, 4417. [Google Scholar] [CrossRef]
- Chien, Y.-C.; Yeh, Y.-C.; Huang, N.-F. Deep Learning Based Route Information Extraction from Satellite Imagery for Agricultural Machinery Management. In Proceedings of the 36th International Conference on Information Networking (ICOIN 2022), Jeju-si, Republic of Korea, 12–15 January 2022; IEEE: New York, NY, USA, 2022; pp. 101–106. [Google Scholar]
- Andrew, W.; Gao, J.; Mullan, S.; Campbell, N.; Dowsey, A.W.; Burghardt, T. Visual Identification of Individual Holstein-Friesian Cattle via Deep Metric Learning. Comput. Electron. Agric. 2021, 185, 106133. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Global Navigation Satellite Systems | Recent Major Upgrades | Impacts on PA | References |
|---|---|---|---|
| GPS | GPS III satellites | Improved signal strength | [28] |
| L5 civil signal | Increased resistance to multipath interference and signal blockages | [29,30] | |
| GLONASS | GLONASS-K satellites | Increased satellite availability and improved signal strength | [31,32] |
| Galileo | Full operational capability | Global coverage and constant and reliable signal reception | [33] |
| High Accuracy Service | An experimental service aiming to provide centimeter-level positioning accuracy | [34] | |
| BeiDou | BeiDou-3 satellites | Global coverage and constant and reliable signal reception | [35,36] |
| New signals (B1C, B2a, and B2b) | Improved positioning accuracy and increased resistance to signal interference | [37,38] |
| Global Navigation Satellite System | Total Studies Indexed in WoSCC during 2000–2022 | Top Percentages of Published Papers per Country | ||
|---|---|---|---|---|
| “Agriculture” | “Precision Agriculture” | “Agriculture” | “Precision Agriculture” | |
| “GPS” | 928 | 431 | USA (28.3%), China (10.1%), India (9.4%) | USA (31.4%), China (10.8%), Spain (9.2%) |
| “GLONASS” | 37 | 20 | USA (18.4%), Germany, Russia (13.2%) | France, Germany, USA (18.2%) |
| “Galileo” | 34 | 10 | USA (17.6%), England, Spain (14.7%) | England, China (21.4%), France, Spain (14.3%) |
| “BeiDou” | 23 | 12 | China (73.9%), England, Germany, Poland, USA (8.7%) | China (66.7%), Germany (13.3%), England, Spain, USA (6.7%) |
| “GPS” + “GLONASS” + “Galileo” + “BeiDou” + “GNSS” | 1110 | 534 | USA (26.6%), China (10.8%), India (8.8%) | USA (29.3%), China (11.6%), Spain (9.5%) |
| Citation Topic Micro | NDVI | LiDAR | Harvesting Robot | Unmanned Aerial Vehicles |
|---|---|---|---|---|
| Total with GNSS | 62 | 27 | 9 | 7 |
| Total without GNSS | 602 | 206 | 82 | 1145 |
| Percentage with GNSS | 10.3% | 13.1% | 11.0% | 0.6% |
| Citation Topic Micro | Geostatistics | Precise Point Positioning | Simultaneous Localization and Mapping | Internet of Things | Deep Learning |
|---|---|---|---|---|---|
| Total with GNSS | 113 | 44 | 15 | 6 | 6 |
| Total without GNSS | 253 | 47 | 25 | 760 | 847 |
| Percentage with GNSS | 44.7% | 93.6% | 60.0% | 0.8% | 0.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Radočaj, D.; Plaščak, I.; Jurišić, M. Global Navigation Satellite Systems as State-of-the-Art Solutions in Precision Agriculture: A Review of Studies Indexed in the Web of Science. Agriculture 2023, 13, 1417. https://doi.org/10.3390/agriculture13071417
Radočaj D, Plaščak I, Jurišić M. Global Navigation Satellite Systems as State-of-the-Art Solutions in Precision Agriculture: A Review of Studies Indexed in the Web of Science. Agriculture. 2023; 13(7):1417. https://doi.org/10.3390/agriculture13071417
Chicago/Turabian StyleRadočaj, Dorijan, Ivan Plaščak, and Mladen Jurišić. 2023. "Global Navigation Satellite Systems as State-of-the-Art Solutions in Precision Agriculture: A Review of Studies Indexed in the Web of Science" Agriculture 13, no. 7: 1417. https://doi.org/10.3390/agriculture13071417
APA StyleRadočaj, D., Plaščak, I., & Jurišić, M. (2023). Global Navigation Satellite Systems as State-of-the-Art Solutions in Precision Agriculture: A Review of Studies Indexed in the Web of Science. Agriculture, 13(7), 1417. https://doi.org/10.3390/agriculture13071417