
A Method for Calculating the Leaf Area of Pak Choi Based on an Improved Mask R-CNN



Abstract
:1. Introduction
2. Materials and Methods
2.1. Pak Choi Planting and Image Acquisition
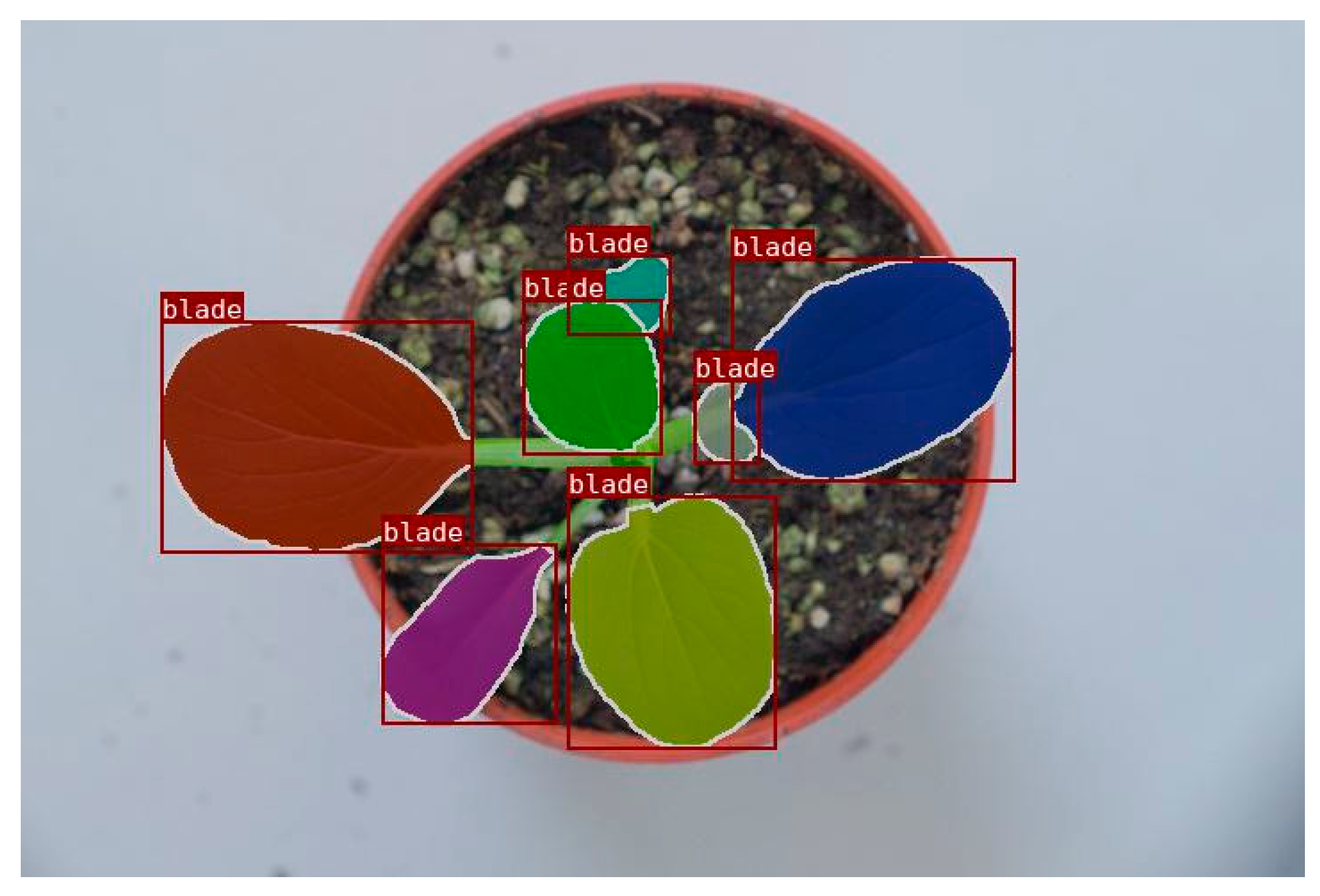
2.2. Image Annotation and Preprocessing
2.3. Improved Mask R-CNN Instance Segmentation Model
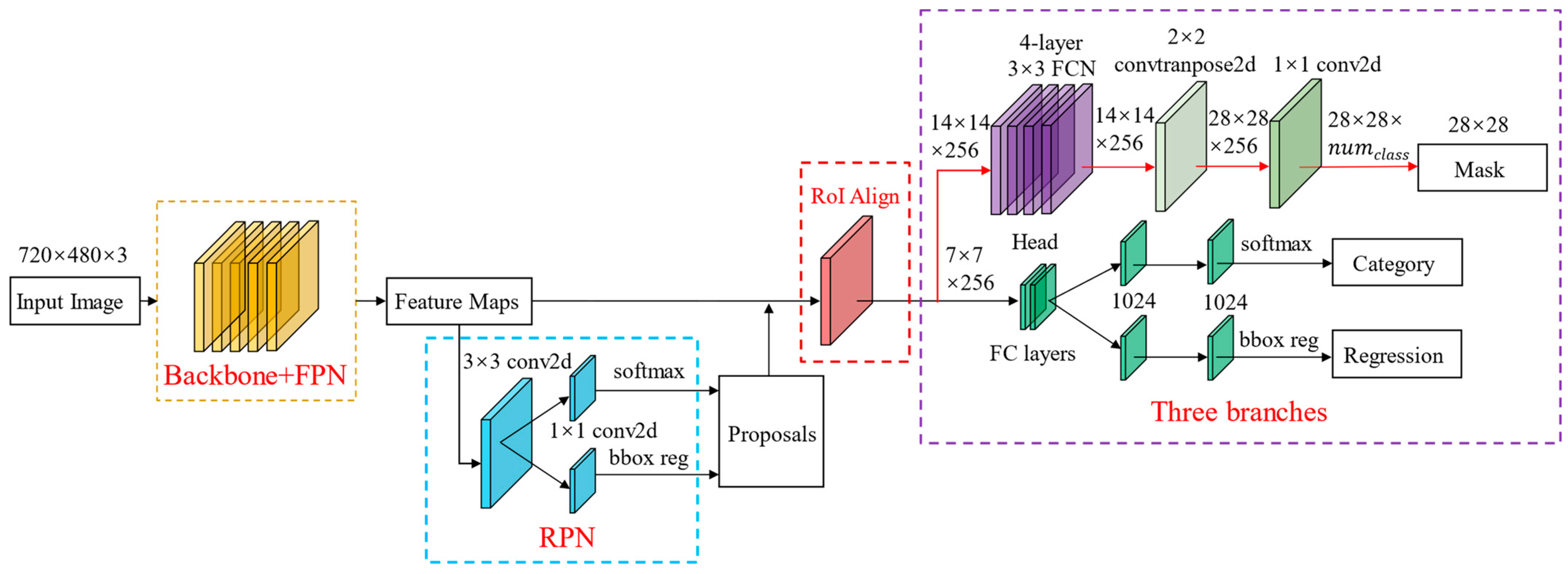
2.3.1. Mask R-CNN
2.3.2. Improved Mask R-CNN Segmentation Branch
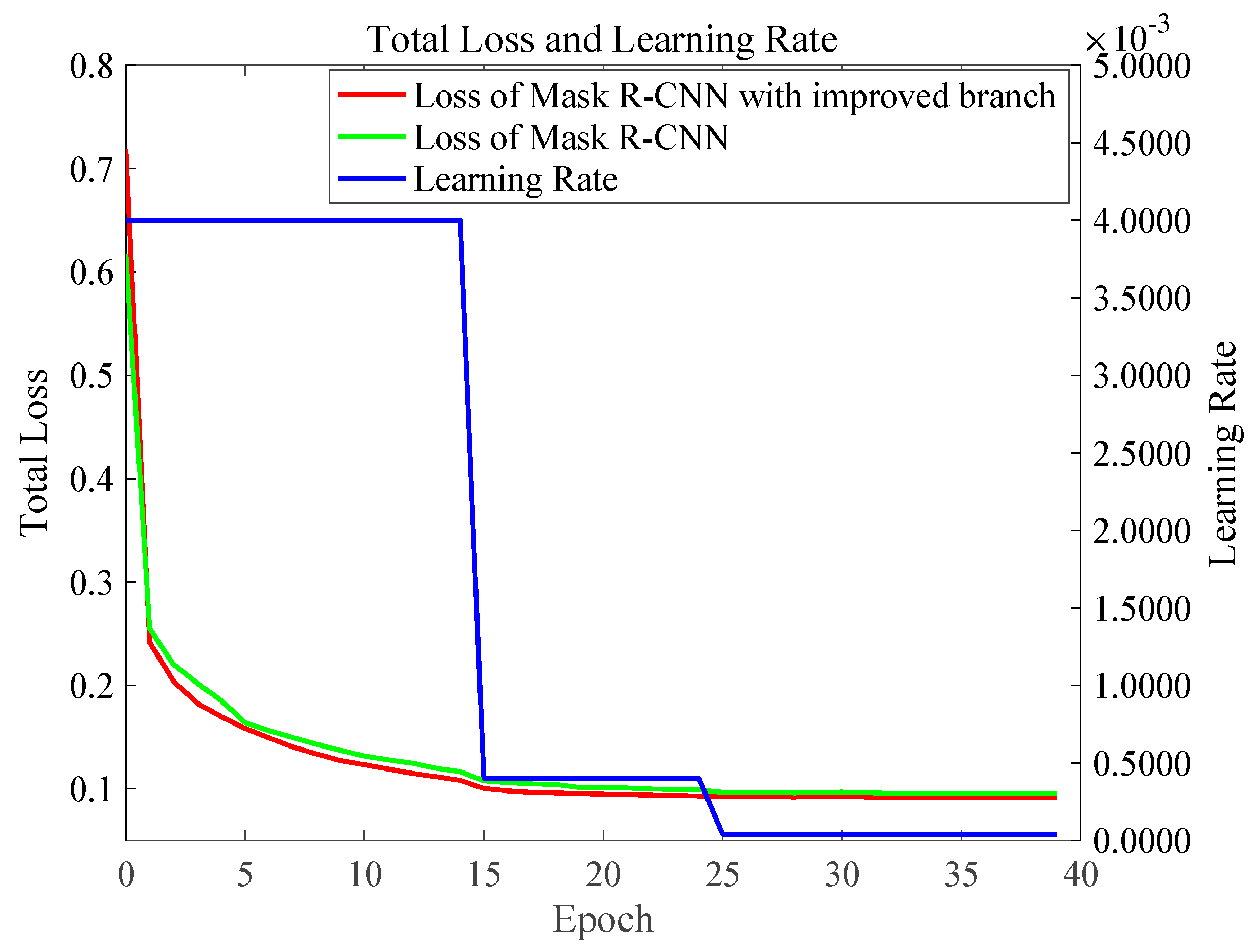
2.3.3. Loss Function
2.4. Algorithm for Calculating the Leaf Area of Pak Choi
2.5. Experimental Environment
2.6. Evaluation Metrics
3. Results and Discussion
3.1. Comparative Experiments Based on Different Backbone Networks
3.2. Comparative Experiments Based on the Improved Segmentation Branch
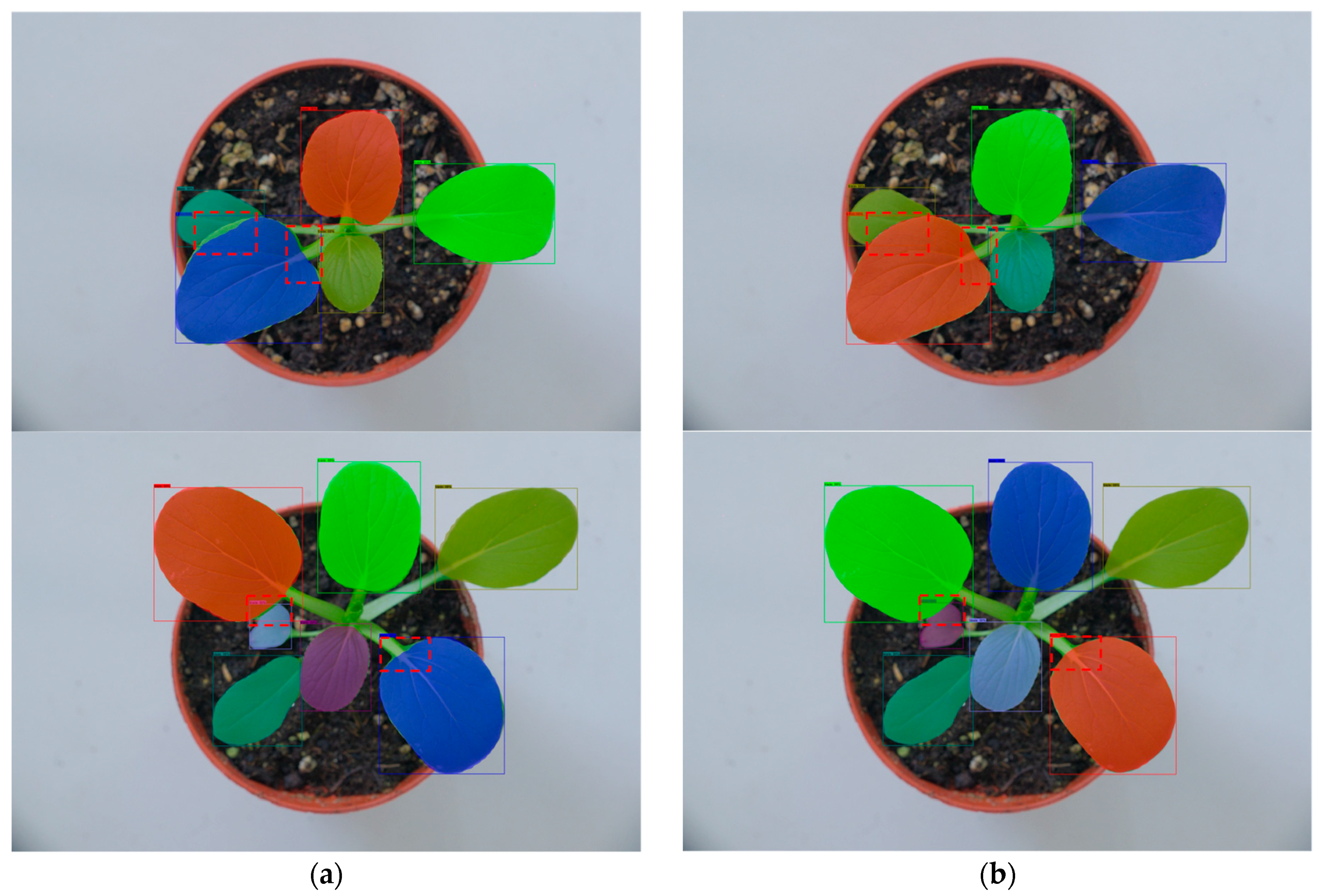
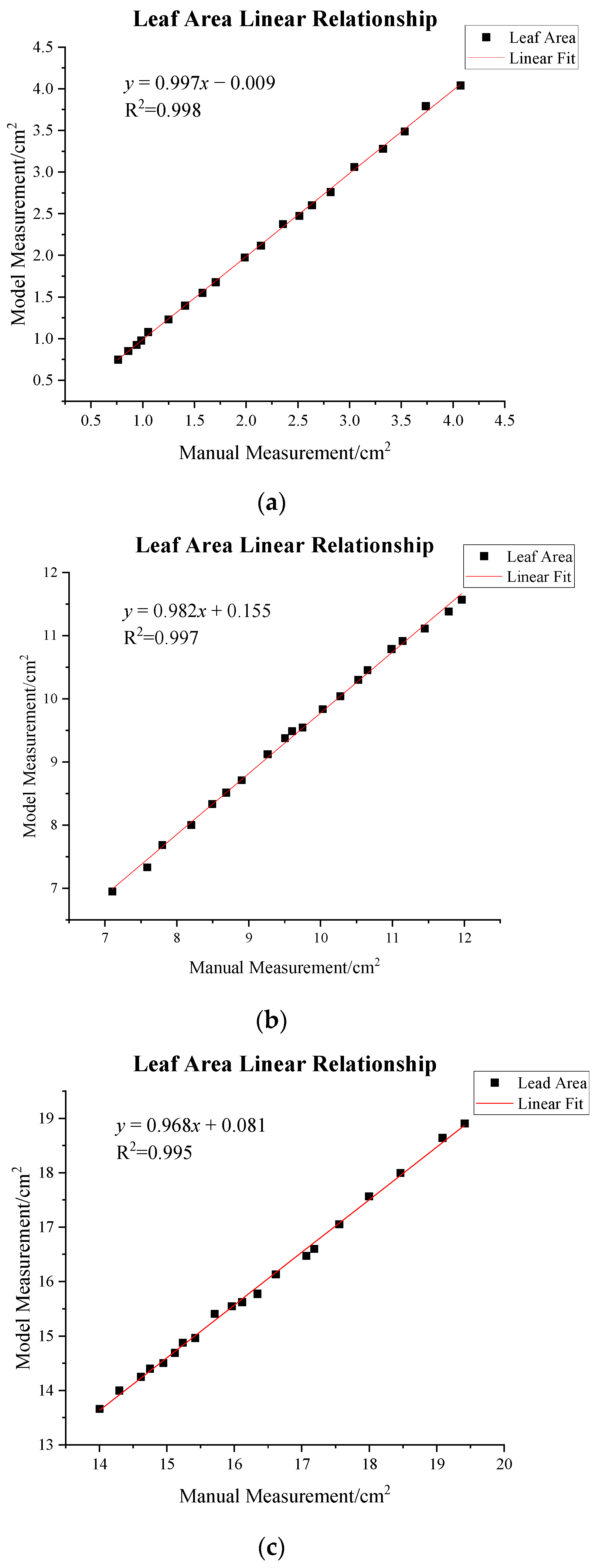
3.3. Analysis of Leaf Area Calculation Results
3.4. Discussion of the Method
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Al-Chalabi, M. Vertical Farming: Skyscraper Sustainability? Sustain. Cities Soc. 2015, 18, 74–77. [Google Scholar] [CrossRef]
- Mao, P.; Duan, F.; Zheng, Y.; Yang, Q. Blue and UV-A Light Wavelengths Positively Affected Accumulation Profiles of Healthy Compounds in Pak-choi. J. Sci. Food Agric. 2021, 101, 1676–1684. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Wang, J.; Liu, Z.; Zhu, J.; Qin, F. Evaluation of a Deep-Learning Model for Multispectral Remote Sensing of Land Use and Crop Classification. Crop J. 2022, 10, 1435–1451. [Google Scholar] [CrossRef]
- Wang, L.; Wang, J.; Zhang, X.; Wang, L.; Qin, F. Deep Segmentation and Classification of Complex Crops Using Multi-Feature Satellite Imagery. Comput. Electron. Agric. 2022, 200, 107249. [Google Scholar] [CrossRef]
- Dananjayan, S.; Tang, Y.; Zhuang, J.; Hou, C.; Luo, S. Assessment of State-of-the-Art Deep Learning Based Citrus Disease Detection Techniques Using Annotated Optical Leaf Images. Comput. Electron. Agric. 2022, 193, 106658. [Google Scholar] [CrossRef]
- Khan, A.I.; Quadri, S.M.K.; Banday, S.; Latief Shah, J. Deep Diagnosis: A Real-Time Apple Leaf Disease Detection System Based on Deep Learning. Comput. Electron. Agric. 2022, 198, 107093. [Google Scholar] [CrossRef]
- Zhu, J.; Yang, G.; Feng, X.; Li, X.; Fang, H.; Zhang, J.; Bai, X.; Tao, M.; He, Y. Detecting Wheat Heads from UAV Low-Altitude Remote Sensing Images Using Deep Learning Based on Transformer. Remote Sens. 2022, 14, 5141. [Google Scholar] [CrossRef]
- Li, X.; Geng, H.; Zhang, L.; Peng, S.; Xin, Q.; Huang, J.; Li, X.; Liu, S.; Wang, Y. Improving Maize Yield Prediction at the County Level from 2002 to 2015 in China Using a Novel Deep Learning Approach. Comput. Electron. Agric. 2022, 202, 107356. [Google Scholar] [CrossRef]
- Pieruschka, R.; Schurr, U. Plant Phenotyping: Past, Present, and Future. Plant Phenomics 2019, 2019, 7507131. [Google Scholar] [CrossRef]
- Nikbakhsh, N.; Baleghi, Y.; Agahi, H. A Novel Approach for Unsupervised Image Segmentation Fusion of Plant Leaves Based on G-Mutual Information. Mach. Vis. Appl. 2021, 32, 5. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, C. Convolutional Neural Networks for Image-Based High-Throughput Plant Phenotyping: A Review. Plant Phenomics 2020, 2020, 4152816. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Wang, Z.; Wang, Z. Method for image segmentation of cucumber disease leaves based on multi-scale fusion convolutional neural networks. Trans. Chin. Soc. Agric. Eng. 2020, 36, 149–157. [Google Scholar]
- Zhao, Q.; Li, L.; Zhang, M.; Lan, T.; Sigrimis, N. Water Stress Diagnosis Algorithm of Greenhouse Tomato Based on Fine-tuning Learning. Trans. Chin. Soc. Agric. Mach. 2020, 51, 340–347+356. [Google Scholar]
- Trivedi, M.; Gupta, A. Automatic Monitoring of the Growth of Plants Using Deep Learning-Based Leaf Segmentation. Int. J. Appl. Sci. Eng. 2021, 18, 2020281. [Google Scholar] [CrossRef]
- Liu, W.; Ye, T.; Li, Q. Tomato Leaf Disease Detection Method Based on Improved SOLO V2. Nongye Jixie Xuebao Trans. Chin. Soc. Agric. Mach. 2021, 52, 213–220. [Google Scholar] [CrossRef]
- Weyler, J.; Magistri, F.; Seitz, P.; Behley, J.; Stachniss, C. In-Field Phenotyping Based on Crop Leaf and Plant Instance Segmentation. In Proceedings of the 2022 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 3–8 January 2022; pp. 2968–2977. [Google Scholar]
- Yuan, H.; Zhu, J.; Wang, Q.; Cheng, M.; Cai, Z. An Improved DeepLab V3+ Deep Learning Network Applied to the Segmentation of Grape Leaf Black Rot Spots. Front. Plant Sci. 2022, 13, 795410. [Google Scholar] [CrossRef] [PubMed]
- Bhagat, S.; Kokare, M.; Haswani, V.; Hambarde, P.; Kamble, R. Eff-UNet++: A Novel Architecture for Plant Leaf Segmentation and Counting. Ecol. Inform. 2022, 68, 101583. [Google Scholar] [CrossRef]
- Deb, M.; Garai, A.; Das, A.; Dhal, K.G. LS-Net: A Convolutional Neural Network for Leaf Segmentation of Rosette Plants. Neural Comput. Appl. 2022, 34, 18511–18524. [Google Scholar] [CrossRef]
- Zhu, S.; Ma, W.; Lu, J.; Ren, B.; Wang, C.; Wang, J. A Novel Approach for Apple Leaf Disease Image Segmentation in Complex Scenes Based on Two-Stage DeepLabv3+ with Adaptive Loss. Comput. Electron. Agric. 2023, 204, 107539. [Google Scholar] [CrossRef]
- Zhang, Y.; Xie, Y.; Xu, X. Measuring the cucumber leaf area using improved Mask R-CNN. Trans. Chin. Soc. Agric. Eng. 2023, 39, 182–189. [Google Scholar] [CrossRef]
- Banu, A.S.; Deivalakshmi, S. AWUNet: Leaf Area Segmentation Based on Attention Gate and Wavelet Pooling Mechanism. Signal Image Video Process. 2023, 17, 1915–1924. [Google Scholar] [CrossRef]
- Yang, T.; Zhou, S.; Xu, A.; Ye, J.; Yin, J. An Approach for Plant Leaf Image Segmentation Based on YOLOV8 and the Improved DEEPLABV3+. Plants 2023, 12, 3438. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision 2017, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-Excitation Networks. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Chen, H.; Sun, K.; Tian, Z.; Shen, C.; Huang, Y.; Yan, Y. BlendMask: Top-Down Meets Bottom-Up for Instance Segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR, Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Xie, E.; Sun, P.; Song, X.; Wang, W.; Liang, D.; Shen, C.; Luo, P. PolarMask: Single Shot Instance Segmentation with Polar Representation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Wang, X.; Kong, T.; Shen, C.; Jiang, Y.; Li, L. SOLO: Segmenting Objects by Locations. In Proceedings of the Computer Vision—ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Reference | Objective | Dataset | Model | Result |
|---|---|---|---|---|---|
| 1. | Zhang et al. [12] | Cucumber leaf lesion segmentation | 760 diseased cucumber leaf images | Multi-Scale Fusion CNNs | Mean accuracy is 93.12% |
| 2. | Zhao et al. [13] | To diagnose water stress of tomato leaves | 2000 tomato leaf images | Mask R-CNN + DenseNet169 | Segmentation accuracy is 94.37%, Classification accuracy is 94.68% |
| 3. | Trivedi et al. [14] | Leaf segmentation; growth monitoring | Leaf segmentation challenge | Unet | Dice accuracy is 95.05%, MAE of growth index is 0.0019 |
| 4. | Liu et al. [15] | Diseased tomato leaf segmentation | Plant village tomato leaf dataset | SOLO V2+ DCN v2 | Mean average precision is 57.2% |
| 5. | Weyler et al. [16] | In-field phenotyping | 1316 plant images | ERFNet+ Clustering | Average precision is 60.4 |
| 6. | Yuan et al. [17] | Diseased grape leaf segmentation | 1180 images of grape leaves | DeepLabv3+ + ECA | Accuracy is 98.7%, mIOU is 0.848 |
| 7. | Bhagat et al. [18] | Leaf segmentation and counting | KOMATSUNA, MSU-PID, and CVPPP dataset | Eff-UNet++ | BestDice is 83.44, 77.17, and 78.27 |
| 8. | Deb et al. [19] | Leaf segmentation of rosette plants | KOMATSUNA and CVPPP | LS-Net | Accuracy is 98.92%, Dice score is 96.51 |
| 9. | Zhu et al. [20] | Apple leaf disease image segmentation | 1491 diseased apple leaf images | DeepLabv3+ + CAB | IOU of leaf is 98.70%, IOU of disease is 86.56% |
| 10. | Zhang et al. [21] | To measure the area of cucumber leaves | 1025 cucumber leaf images | Mask R-CNN + Sobel | Average precision is 99.1%, Area error rate is 5.45% |
| 11. | Banu et al. [22] | Plant leaf area segmentation | Crop Weed Field Image Dataset | UNet + Wavelet Pooing | IOU score is 94.81% |
| 12. | Yang et al. [23] | Plant leaf image segmentation | 9763 plant leaf images | YOLO v8 + DeepLabv3 | mIOU is 90.8%, Pixel accuracy is 93.0% |
| Parameter | Value |
|---|---|
| CPU | Intel Core i5-11400F |
| Memory/GB | 32 GB |
| GPU | NVIDIA GeForce RTX 4060Ti |
| System | Windows 10 |
| Development tool | PyCharm |
| Network framework | Python 3.8.17 + PyTorch 1.13.1 |
| Batch size | 8 |
| Epoch | 40 |
| Optimizer | SGD |
| Momentum | 0.9 |
| Weight decay coefficient | 0.0001 |
| Basic learning rate | 0.004 |
| Learning rate decay coefficient | 0.1 |
| Epoch of learning rate decay | 15, 25 |
| Input image size | 720 × 480 × 3 |
| Backbone | Training Time/min | Average Loss | mAP (Detection) | mAP (Segmentation) |
|---|---|---|---|---|
| EffcientNet_B0 | 38 | 0.5475 | 0.8258 | 0.8175 |
| MobileNet_V3 | 40 | 0.3254 | 0.8411 | 0.8280 |
| ResNet 50 | 80 | 0.0955 | 0.9035 | 0.9030 |
| ResNet101 | 200 | 0.0920 | 0.9050 | 0.9040 |
| Model | Average Loss | mAP (Detection) | mAP (Segmentation) | |
|---|---|---|---|---|
| Mask R-CNN | 0.0955 | 0.9035 | 0.9030 | 5.15% |
| Mask R-CNN + Improved Segmentation Branch | 0.0922 | 0.9136 | 0.9132 | 4.47% |
| Experiment Number | mAP (Detection) | mAP (Segmentation) | |
|---|---|---|---|
| Experiment 1 (Original) | 0.9136 | 0.9132 | 4.47% |
| Experiment 2 | 0.9158 | 0.9153 | 4.42% |
| Experiment 3 | 0.9124 | 0.9121 | 4.48% |
| Experiment 4 | 0.9147 | 0.9143 | 4.45% |
| Experiment 5 | 0.9115 | 0.9112 | 4.52% |
| Average | 0.9136 | 0.9132 | 4.47% |
| Experiment Number | Split Ratio | Train Set Size after Augmentation | Test Set Size | mAP (Detection) | mAP (Segmentation) | |
|---|---|---|---|---|---|---|
| Experiment 1 (Original) | 8:2 | 1920 | 200 | 0.9136 | 0.9132 | 4.47% |
| Experiment 6 | 7:3 | 1680 | 200 | 0.9103 | 0.9101 | 4.65% |
| Experiment 7 | 6:4 | 1440 | 200 | 0.9027 | 0.9022 | 5.17% |
| Experiment 8 | 5:5 | 1200 | 200 | 0.8952 | 0.8950 | 5.68% |
| Stage | mAP | |
|---|---|---|
| Seeding stage | 0.9221 | 2.85% |
| Growth stage | 0.9162 | 3.48% |
| Mature stage | 0.9013 | 4.47% |
| Model | Key Features | Advantage | Limitation |
|---|---|---|---|
| PolarMask | Modeling Contours Based on a Polar Coordinate System | High Efficiency, Simplified Process | Challenges with Extreme Cases |
| BlendMask | Blended Attention Mechanism, Flexible Area Masks | High Precision, Good Performance on Small Objects | Challenges with Extreme Cases |
| SOLO | Direct Instance Segmentation, Class-Agnostic Segmentation | High Efficiency, Simplified Process | Challenges with Small Objects |
| Mask R-CNN | ROI Align layer, Simultaneous Detection and Segmentation | High Precision Segmentation, Adaptability to Different Objects | High Computational Cost |
| Model | Backbone | mAP (Segmentation) | Time (s) | |
|---|---|---|---|---|
| PolarMask | ResNet 50 | 0.8257 | 7.28% | 0.092 |
| BlendMask | ResNet 50 | 0.8668 | 6.76% | 0.099 |
| SOLO | ResNet 50 | 0.8861 | 6.30% | 0.076 |
| Mask R-CNN | ResNet 50 | 0.9030 | 5.15% | 0.078 |
| Improved Mask R-CNN | ResNet 50 | 0.9132 | 4.47% | 0.079 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, F.; Li, Y.; Liu, Z.; Gong, L.; Liu, C. A Method for Calculating the Leaf Area of Pak Choi Based on an Improved Mask R-CNN. Agriculture 2024, 14, 101. https://doi.org/10.3390/agriculture14010101
Huang F, Li Y, Liu Z, Gong L, Liu C. A Method for Calculating the Leaf Area of Pak Choi Based on an Improved Mask R-CNN. Agriculture. 2024; 14(1):101. https://doi.org/10.3390/agriculture14010101
Chicago/Turabian StyleHuang, Fei, Yanming Li, Zixiang Liu, Liang Gong, and Chengliang Liu. 2024. "A Method for Calculating the Leaf Area of Pak Choi Based on an Improved Mask R-CNN" Agriculture 14, no. 1: 101. https://doi.org/10.3390/agriculture14010101
APA StyleHuang, F., Li, Y., Liu, Z., Gong, L., & Liu, C. (2024). A Method for Calculating the Leaf Area of Pak Choi Based on an Improved Mask R-CNN. Agriculture, 14(1), 101. https://doi.org/10.3390/agriculture14010101