
Design and Testing of a Closed Multi-Channel Air-Blowing Seedling Pick-Up Device for an Automatic Vegetable Transplanter

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Machine Structure and Working Principle
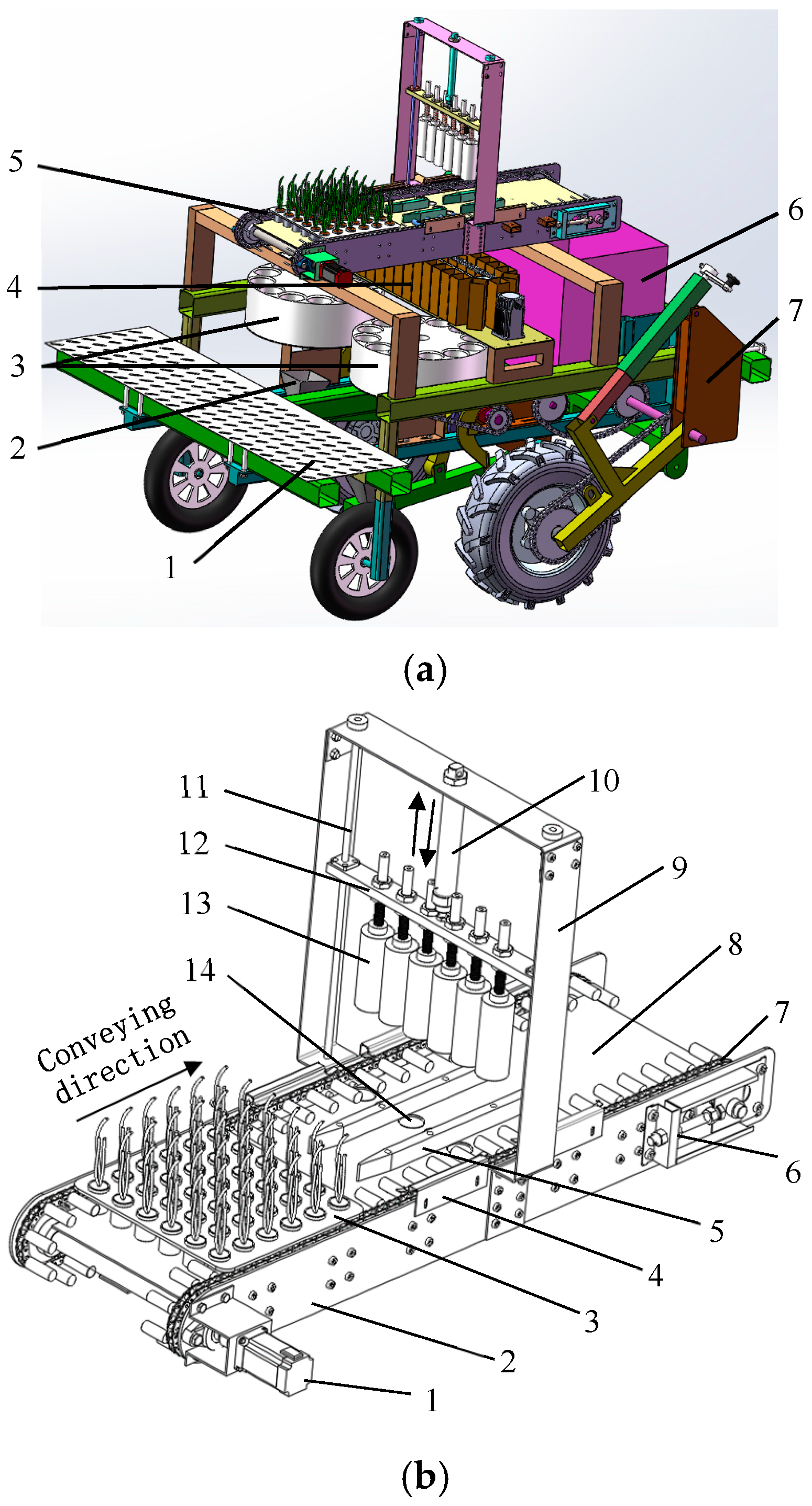
2.1.1. Overall Design of Automatic Transplanter
2.1.2. Working Principle of the Seedling Selection System
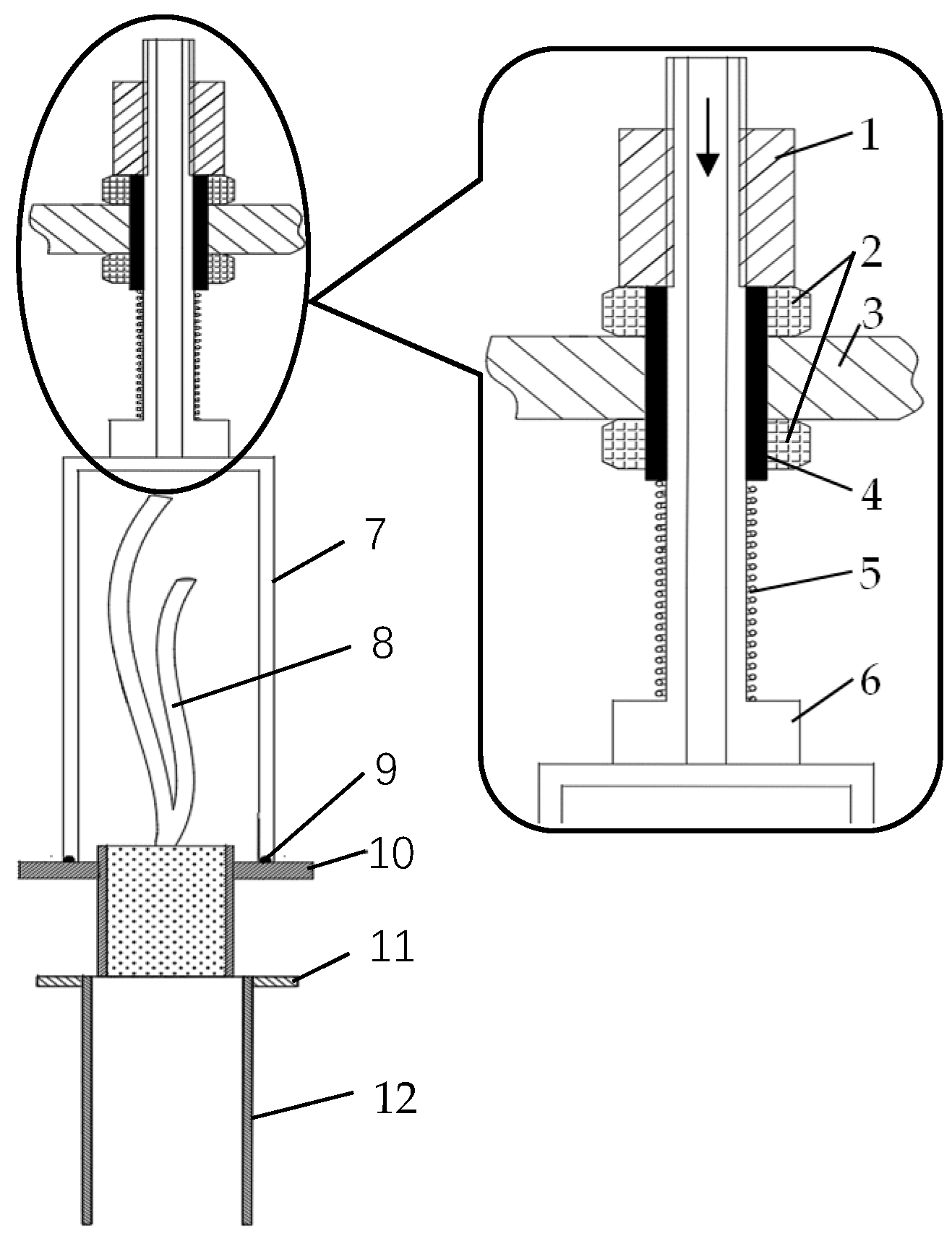
2.1.3. Working Principle of the Seedling Pick-Up
2.2. Mechanical Model of Plug Seedlings in the Process of Picking Seedlings
- (1)
- Pour compressed air into the seedling cup, F1(t) + mg > f1(t) + Fnj, this is the accelerated falling process.
- (2)
- Stop aeration to the seedling cup, F2(t) + mg < f2(t); this is the plug seedling slow down and stop moving process.
- (3)
- The plug seedlings fall along the seedling tube for a certain distance but do not break away from the seedling tube. At this time, F3(t) + mg > f3(t) is the process of acceleration of the falling of the plug.
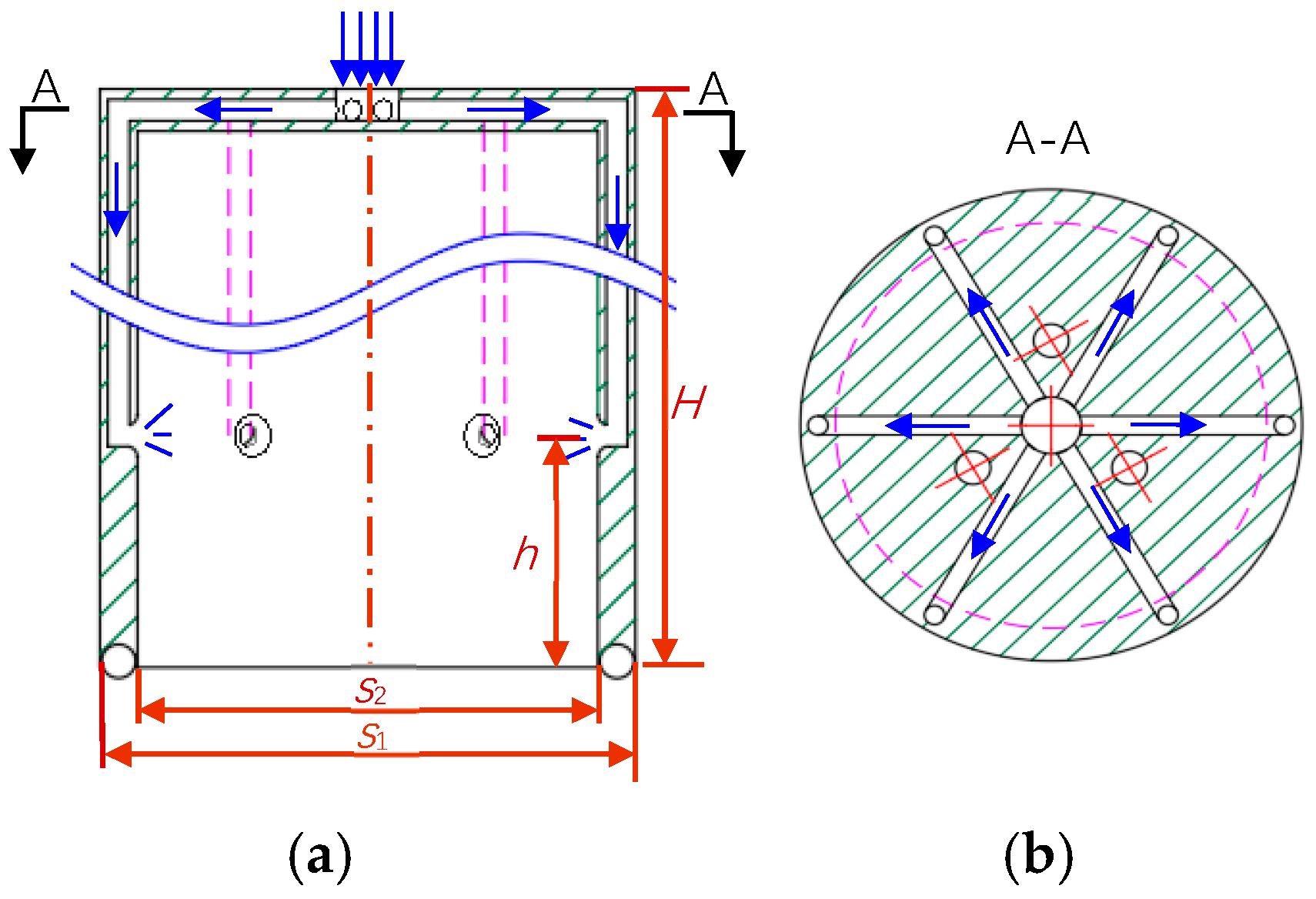
2.3. Airflow Simulation Analysis of Air-Blown Seedling Picking
2.4. Experiment Conditions
2.5. Experiment Method and Index
2.6. Orthogonal Experiment
3. Results and Discussion
3.1. Airflow Simulation Result Analysis
3.1.1. Simulation Analysis of Direct-Blowing Seedling Picking
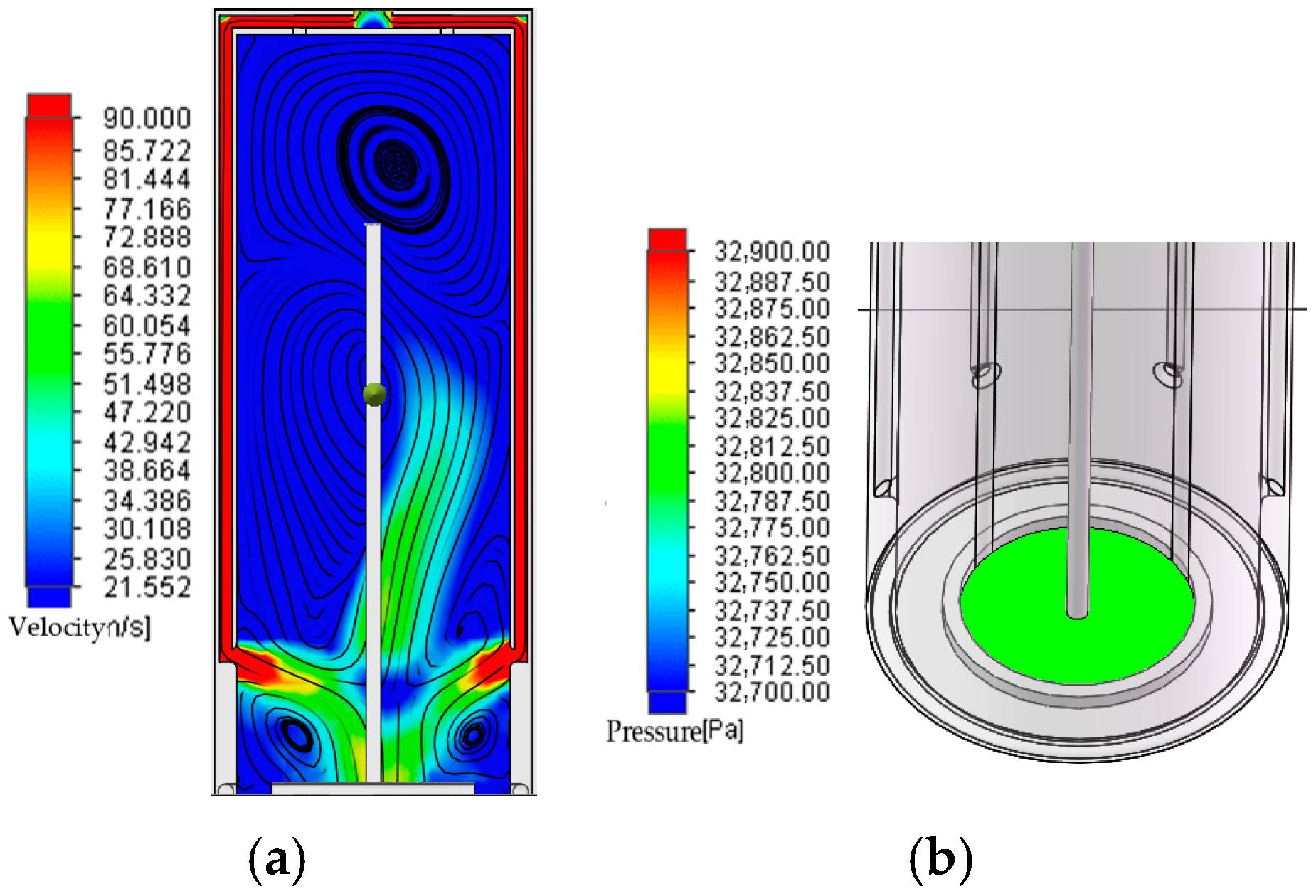
3.1.2. Simulation Analysis of Closed Multi-Channel Air-Blown Seedling Picking
3.2. Single Factor Test
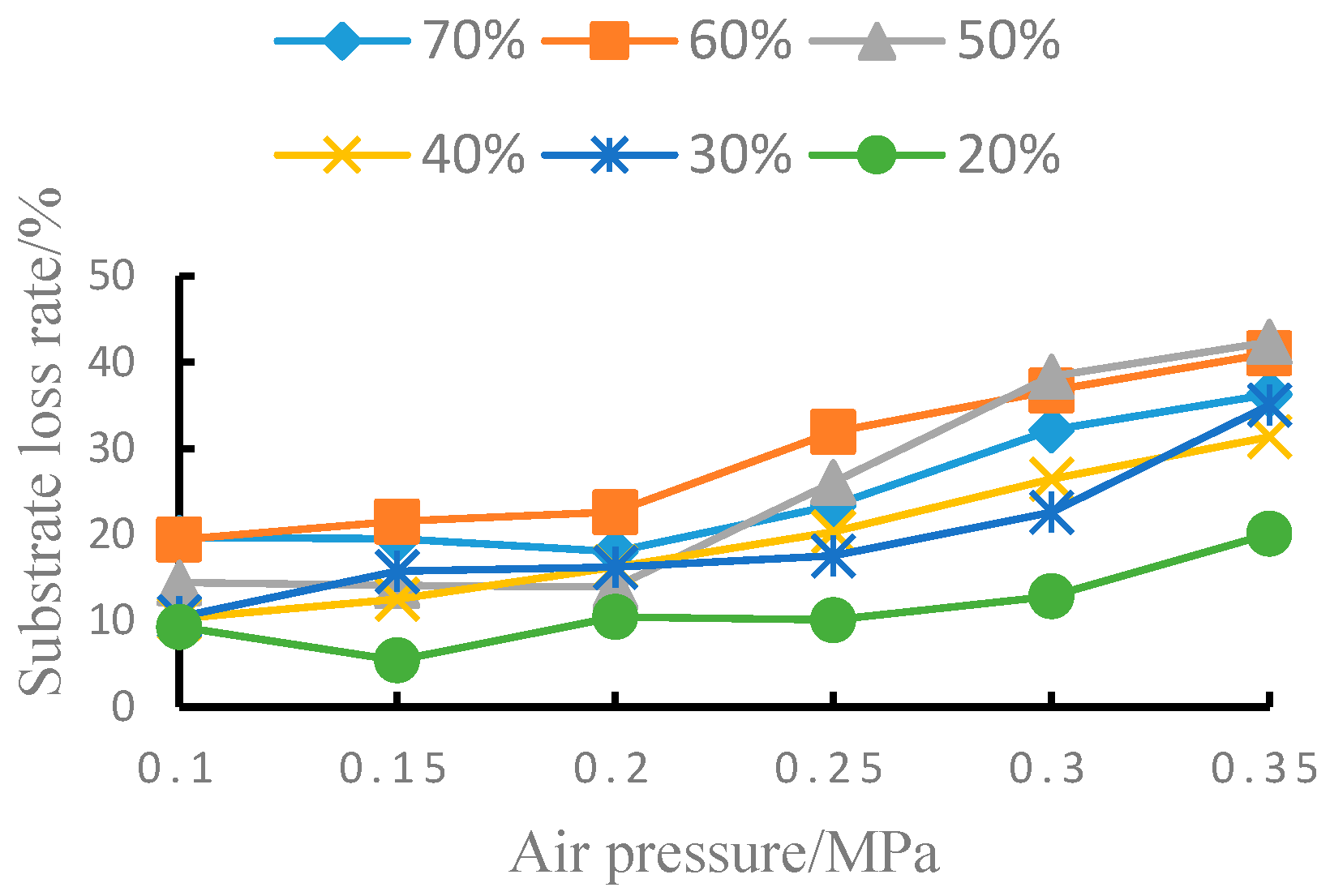
3.2.1. Effects of Plug Moisture Content and Seedling Air Pressure on Substrate Loss Rate
3.2.2. The Relationship between the Qualified Rate of Picking Seedlings and the Time of Air Blowing
3.3. Orthogonal Experiment Results and Analysis
3.4. Discussion
4. Conclusions
- A closed multi-channel air-blowing seedling-picking device was designed, consisting mainly of a combined plug tray, tray feeding device, seedling-picking mechanism, and a seedling-guiding tube. Controlled by a PLC touch screen system, these components work together to achieve low seedling injury, reduced energy consumption, and high-speed seedling picking and placement.
- A dynamic analysis model of plug seedlings was developed to study their movement during the seedling-picking process. Key parameters affecting seedling performance were identified, including the moisture content of the plug, the air pressure for seedling extraction, and the air-blowing duration.
- CFD simulation was conducted for both the closed multi-channel air-blown seedling picking and direct-blowing methods. The results showed that the maximum air velocity on the surface of the closed-type seedling picking plug was 50 m/s, significantly lower than the 100 m/s in the direct-blowing method, resulting in more uniform force distribution on the plug.
- Single-factor test results indicated that when the moisture content of the plug was 20%, air pressure for seedling picking was 0.3 MPa, and air-blowing time exceeded 30 ms, the qualified seedling-picking rate was higher. The orthogonal test results revealed that air-blowing time had a very significant effect on the qualified seedling-picking rate, while the moisture content of the plug and seedling picking pressure had a significant effect. The optimal parameter combination for seedling picking was a plug moisture content of 20%, air pressure of 0.3 MPa, and an air-blowing time of 30 ms. Under these conditions, the qualified seedling picking rate reached 97.22%, and the substrate loss rate was 10.46%, meeting the requirements for pepper seedling picking.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Mao, C.; Luo, H.; Zhu, Y.; Zhang, B.; Xiao, X. Research status and development trend of seedling transplanting machinery. J. Chin. Agric. Mech. 2020, 41, 215–222. [Google Scholar]
- Cui, W.; Zhao, L.; Liu, L.; Liu, Z.; Zhao, J.; Zhao, Z. Kinematic analysis and experiment of rotary pick-up mechanism on seedling pick-up device. Trans. Chin. Soc. Agric. Mach. 2020, 51, 79–84,98. [Google Scholar]
- Sun, L.; Shen, J.; Zhou, Y.; Ye, Z.; Yu, G.; Wu, C. Design of non-circular gear linkage combination driving type vegetable pot seedling transplanting mechanism. Nongye Gongcheng Xuebao 2019, 35, 26–33. [Google Scholar]
- Dang, Y.; Jin, X.; Li, H.; Wang, J.; Lu, Y.; Ding, B.; Li, X. Design of single-degree-of-freedom four-bar seedling-taking and throwing manipulator. Nongye Gongcheng Xuebao 2019, 35, 39–47. [Google Scholar]
- Yang, Q.; Huang, G.; Shi, X.; He, M.; Ahmad, I.; Zhao, X.; Addy, M. Design of a control system for a mini-automatic transplanting machine of plug seedling. Comput. Electron. Agric. 2020, 169, 105226. [Google Scholar] [CrossRef]
- Kumar, G.V.P.; Raheman, H. Development of a walk-behind type hand tractor powered vegetable transplanter for paper pot seedlings. Biosyst. Eng. 2011, 110, 189–197. [Google Scholar] [CrossRef]
- Kumar, G.V.P.; Raheman, H. Automatic feeding mechanism of a vegetable transplanter. Int. J. Agric. Biol. Eng. 2012, 5, 20–27. [Google Scholar]
- Rahul, K.; Raheman, H.; Paradkar, V. Design and development of a 5R 2DOF parallel robot arm for handling paper pot seedlings in a vegetable transplanter. Comput. Electron. Agric. 2019, 166, 105014. [Google Scholar] [CrossRef]
- Choi, W.C.; Kim, D.C.; Ryu, I.H.; Kim, K.U. Development of a seedling pick-up device for vegetable transplanters. Trans. Am. Soc. Agric. Eng. 2002, 45, 13–19. [Google Scholar]
- Ni, Y.; Jin, C.; Liu, J. Design and experiment of system for picking up and delivering seedlings in automatic transplanter. Trans. Chin. Soc. Agric. Eng. 2015, 31, 10–19. (In Chinese) [Google Scholar]
- Wen, Y.; Zhang, J.; Tian, J.; Duan, D.; Zhang, Y.; Tan, Y.; Yuan, T.; Li, X. Design of a traction double-row fully automatic transplanter for vegetable plug seedlings. Comput. Electron. Agric. 2021, 182, 106017. [Google Scholar] [CrossRef]
- Jin, X.; Du, X.; Yang, C.; Ji, J.; Dong, Z.; Yan, H. Design and experiment on automatic transporting mechanism for vegetable potted seedlings. Trans. Chin. Soc. Agric. Mach. 2016, 47, 103–111. [Google Scholar]
- Wang, P.; Yan, H.; Li, P. Design and experiment of ejecting-clip pneumatic picking-up seedlings device. Agric. Eng. 2020, 10, 76–81. [Google Scholar]
- Ji, J.; Yang, L.; Jin, X.; Ma, H.; Pang, J.; Huang, R.; Du, M. Design of intelligent transplanting system for vegetable pot seedling based on plc control. J. Intell. Fuzzy Syst. 2019, 37, 4847–4857. [Google Scholar] [CrossRef]
- Jin, X.; Li, M.; Li, D.; Ji, J.; Pang, J.; Wang, J.; Peng, L. Development of automatic conveying system for vegetable seedlings. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 178. [Google Scholar] [CrossRef]
- Hu, J.; Chang, H.; Yang, L.; Han, L.; Mao, H.; Zhang, S. Design and experiment of control system for automatic transplanter picking up and spacing casting whole row of seedlings. Trans. Chin. Soc. Agric. Mach. 2018, 49, 78–84. [Google Scholar]
- Liao, Q.; Wang, Y.; Hu, Q.; Zhang, Q.; He, K.; Xiao, L. Analysis and experiment on system of pick-up device for rapeseed substrate seedling transplanter. Trans. Chin. Soc. Agric. Mach. 2020, 51, 93–102. [Google Scholar]
- Yin, D.; Wang, J.; Zhou, M.; Yang, Y.; Wang, J. Optimal design and experiment of vegetable potted seedlings pick-up mechanism for exploring and picking-pushing plugs. Trans. Chin. Soc. Agric. Mach. 2019, 50, 64–71. [Google Scholar]
- Ye, B.; Tang, T.; Yu, G.; Tong, J.; Yi, W.; Zheng, Y. Dynamics analysis and tests on seedling pick-up mechanism of planetary gear train of combined gear transmission with non-circular gears. Trans. Chin. Soc. Agric. Eng. 2018, 49, 74–82. [Google Scholar]
- Tong, J.; Shi, H.; Wu, C.; Ding, Y.; Zhao, X.; Wang, R. Simulation and test of seedling pot grabbing by spade end-effector. Trans. Chin. Soc. Agric. Mach. 2019, 50, 107–116. [Google Scholar]
- Zhao, Y.; Liu, X.; Xue, X.; Zhang, W.; Dan, Y.; Zhou, M. Optimal design and experiment of fully-automated potted eggplant seedling transplanting mechanism. Trans. Chin. Soc. Agric. Mach. 2018, 49, 152–160. [Google Scholar]
- Wang, M. Design and Experimental Research on Critical Components of Auto Transplanter with Combined Tray; China Agricultural University: Beijing, China, 2017. [Google Scholar]
- Han, L.; Mao, H.; Zhao, H.; Liu, Y.; Hu, J.; Ma, G. Design of root lump loosening mechanism using air jets to eject vegetable plug seedlings. Trans. Chin. Soc. Agric. Eng. 2019, 35, 37–45. [Google Scholar]
- Shaw, L.N. Removing and handling modular vegetable seedling from nursery trays. Proc. Fla. State Hortic. Soc. 1999, 112, 153–155. [Google Scholar]
- Feng, S.; Wu, M.; Yan, B.; Quan, W. Research status and prospect of seedling pick-up device of pot seedling transplanter. J. Agric. Mech. Res. 2020, 42, 1–9. [Google Scholar]
- Yu, X.; Zhao, Y.; Chen, B.; Zhou, M.; Zhang, H.; Zhang, Z. Current situation and prospect of transplanter. Trans. Chin. Soc. Agric. Mach. 2014, 45, 44–53. [Google Scholar]
- Yan, X.; Hu, J.; Wu, F.; Miao, X.; He, J. Design and experiment of full-row-pick-up and single-dropping seedling transplanter. Trans. Chin. Soc. Agric. Mach. 2013, 44, 7–13. [Google Scholar]
- Ma, X.; Ma, C.; Sun, Y.; Zhang, S.; Yang, H. The study of feeding and dropping seedling mechanism on air-pruning tray seedling growing transplanting unit. Trans. Chin. Soc. Agric. Mach. 1996, S1, 52–56. [Google Scholar]
- Sun, Y.; Ma, C.; Ji, C. A development of air-pruning tray seedling growing and transplanting system. Trans. Chin. Soc. Agric. Eng. 1991, 2, 86–91. [Google Scholar]
- Yuan, T.; Wang, D.; Wen, Y.; Zhu, S.; Chen, Y.; Tan, Y. Design and experiment of air-blowing combined with vibration type seedlings unloading mechanism of vegetable transplanter. Trans. Chin. Soc. Agric. Mach. 2019, 50, 80–87. [Google Scholar]
- DS SOLIDWORKS Company. SOLIDWORKS 2022: SOLIDWORKS Flow Simulation; DS SOLIDWORKS Company: Waltham, MA, USA, 2022. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Factor | ||
|---|---|---|---|
| Moisture Content/% A | Seedling Air Pressure/MPa B | Blow Time/ms C | |
| 1 | 20 | 0.2 | 30 |
| 2 | 30 | 0.25 | 35 |
| 3 | 40 | 0.3 | 40 |
| Test Number | Influencing Factors | Evaluation Indicators | |||
|---|---|---|---|---|---|
| A | B | C | Qualified Rate η1/% | Loss Rate η2/% | |
| 1 | 1 | 1 | 1 | 97.22 | 12.33 |
| 2 | 1 | 2 | 2 | 91.67 | 15.74 |
| 3 | 1 | 3 | 3 | 94.44 | 17.56 |
| 4 | 2 | 1 | 2 | 91.67 | 14.23 |
| 5 | 2 | 2 | 3 | 86.11 | 26.78 |
| 6 | 2 | 3 | 1 | 94.44 | 18.87 |
| 7 | 3 | 1 | 3 | 88.89 | 22.33 |
| 8 | 3 | 2 | 1 | 91.67 | 24.34 |
| 9 | 3 | 3 | 2 | 94.44 | 19.80 |
| Index | Factor | K1 | K2 | K3 | R | Better Solution |
|---|---|---|---|---|---|---|
| η1 | A | 283.33 | 272.22 | 275 | 11.11 | A1 |
| B | 277.78 | 269.45 | 283.32 | 13.87 | B3 | |
| C | 283.33 | 277.78 | 269.44 | 13.89 | C1 | |
| Influence | C > B > A | |||||
| η2 | A | 45.63 | 59.88 | 66.47 | 20.84 | A1 |
| B | 48.89 | 66.86 | 56.23 | 17.97 | B1 | |
| C | 55.54 | 49.77 | 66.67 | 16.90 | C2 | |
| Influence | A > B > C | |||||
| Index | Source | Sum of Square | Degrees of Freedom | Mean Square | F | p |
|---|---|---|---|---|---|---|
| η1 | A | 22.28 | 2 | 11.14 | 13.02 | 0.071 |
| B | 32.50 | 2 | 16.25 | 18.99 | 0.05 | |
| C | 32.59 | 2 | 16.29 | 19.04 | 0.049 | |
| Error | 1.71 | 2 | 0.86 | |||
| sum | 89.08 | 8 | ||||
| η2 | A | 75.64 | 2 | 37.82 | 55.51 | 0.0177 |
| B | 54.42 | 2 | 27.21 | 39.93 | 0.0244 | |
| C | 49.20 | 2 | 24.60 | 36.10 | 0.027 | |
| Error | 1.36 | 2 | 0.68 | |||
| sum | 180.63 | 8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Wen, X.; Wen, Y.; Wang, X.; Zhu, H.; Pan, Z.; Yang, Z. Design and Testing of a Closed Multi-Channel Air-Blowing Seedling Pick-Up Device for an Automatic Vegetable Transplanter. Agriculture 2024, 14, 1688. https://doi.org/10.3390/agriculture14101688
Zhang B, Wen X, Wen Y, Wang X, Zhu H, Pan Z, Yang Z. Design and Testing of a Closed Multi-Channel Air-Blowing Seedling Pick-Up Device for an Automatic Vegetable Transplanter. Agriculture. 2024; 14(10):1688. https://doi.org/10.3390/agriculture14101688
Chicago/Turabian StyleZhang, Bingchao, Xiangyu Wen, Yongshuang Wen, Xinglong Wang, Haoqi Zhu, Zexin Pan, and Zhenyu Yang. 2024. "Design and Testing of a Closed Multi-Channel Air-Blowing Seedling Pick-Up Device for an Automatic Vegetable Transplanter" Agriculture 14, no. 10: 1688. https://doi.org/10.3390/agriculture14101688