
Kinematic Analysis of the Vibration Harvesting Process of Lycium barbarum L. Fruit


Abstract
1. Introduction
2. Materials and Methods
2.1. Physical Tests of the Branches
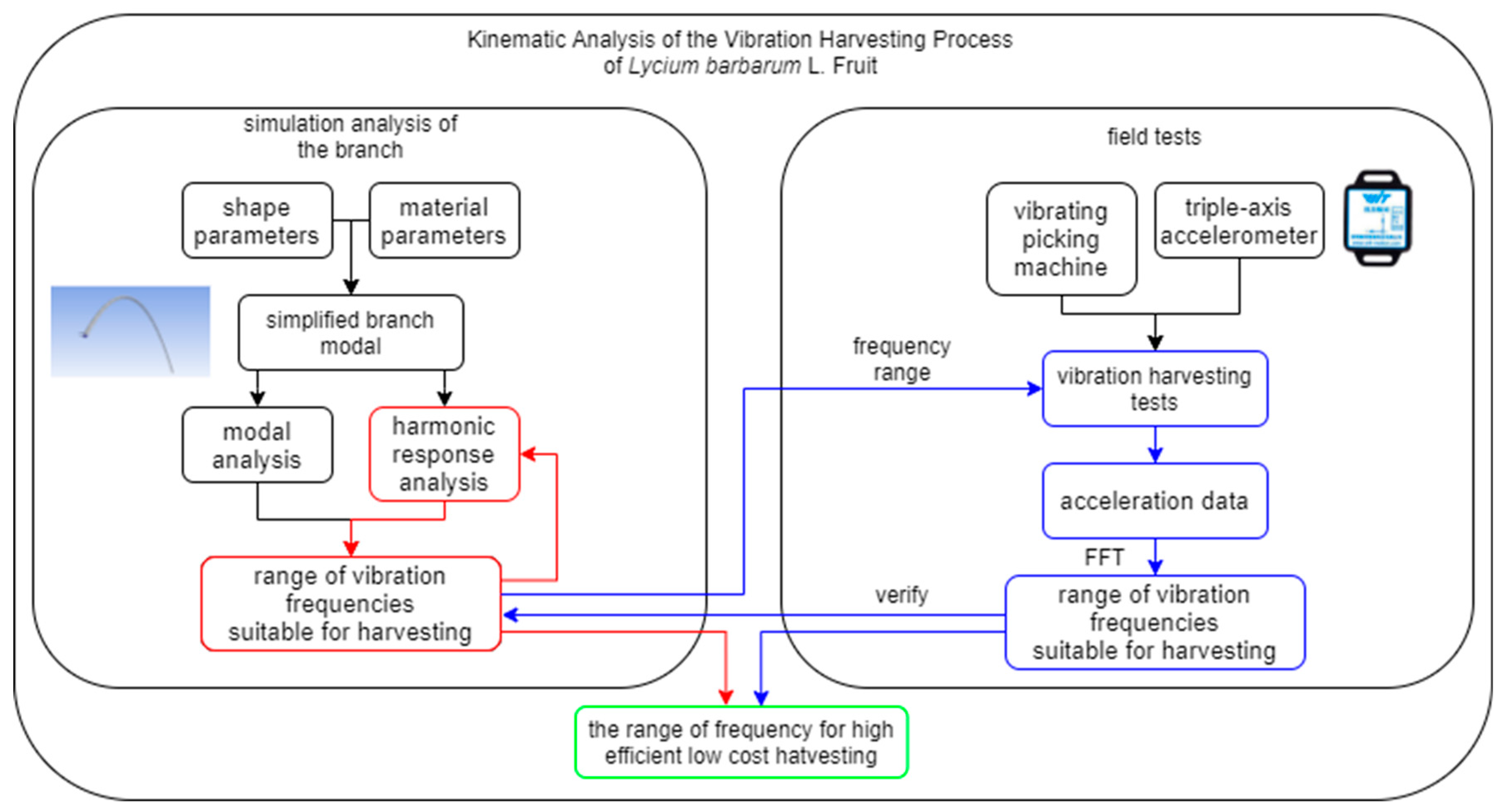
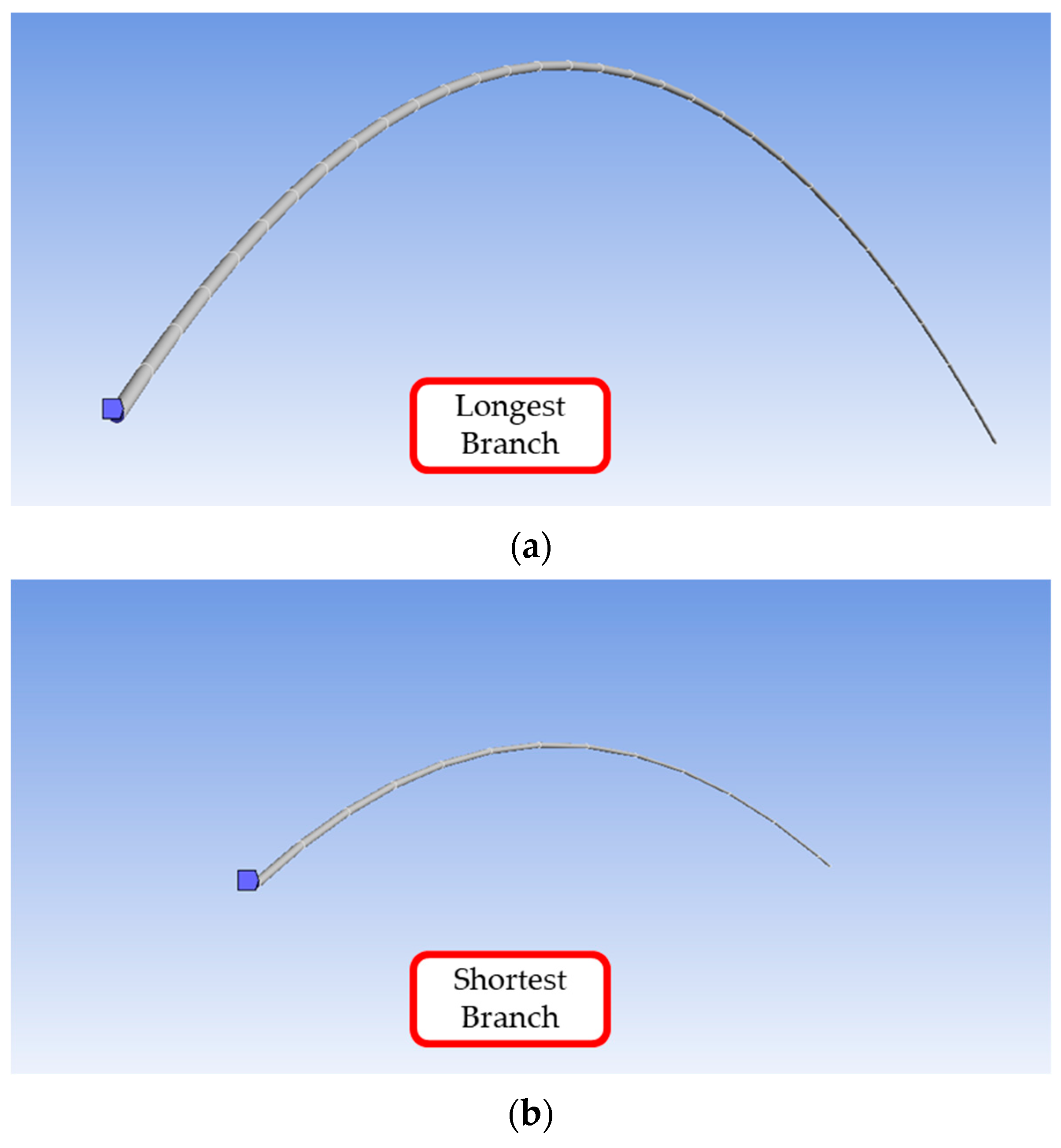
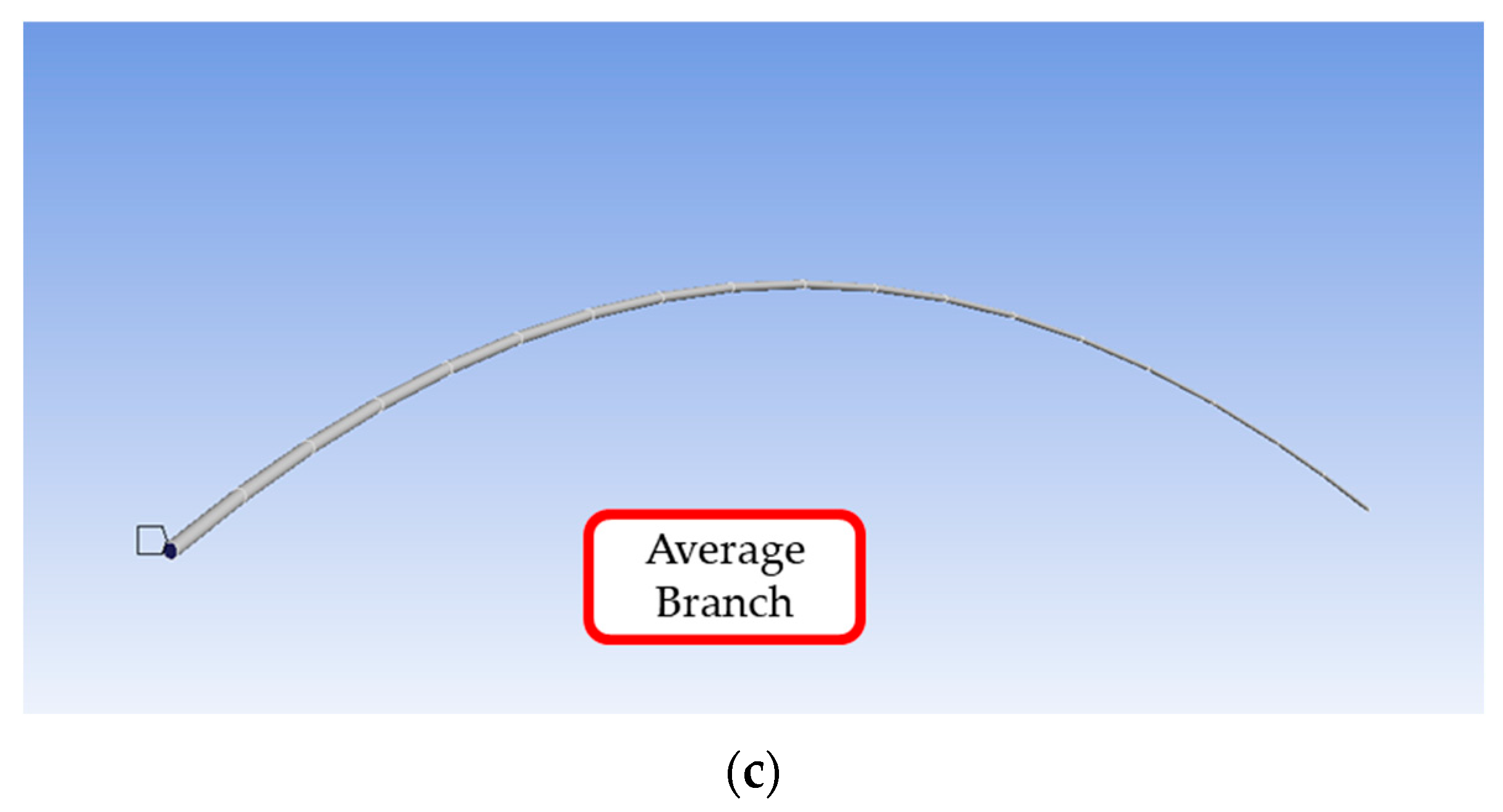
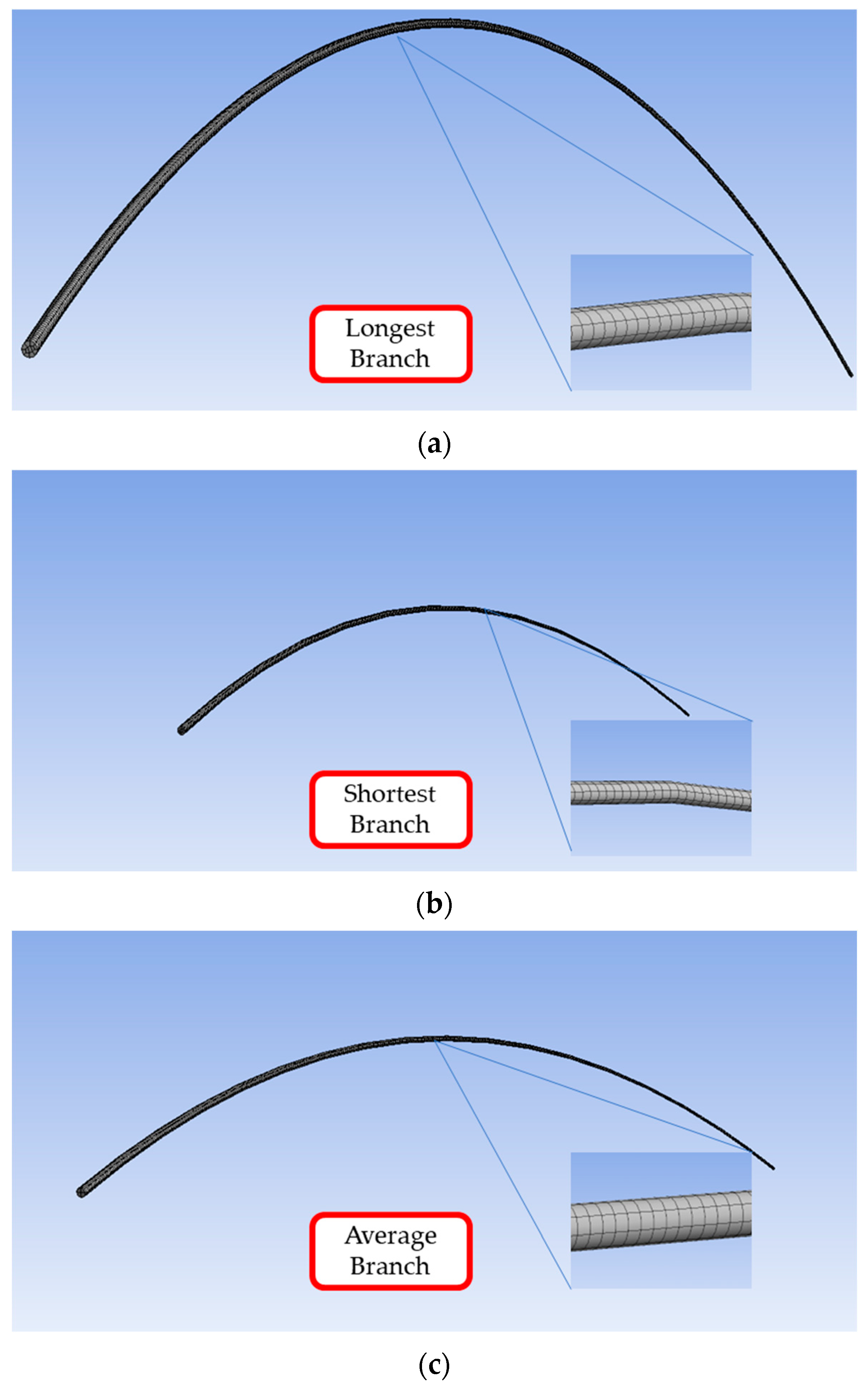
2.2. Establishment of the Simplified 3D Branch Modal
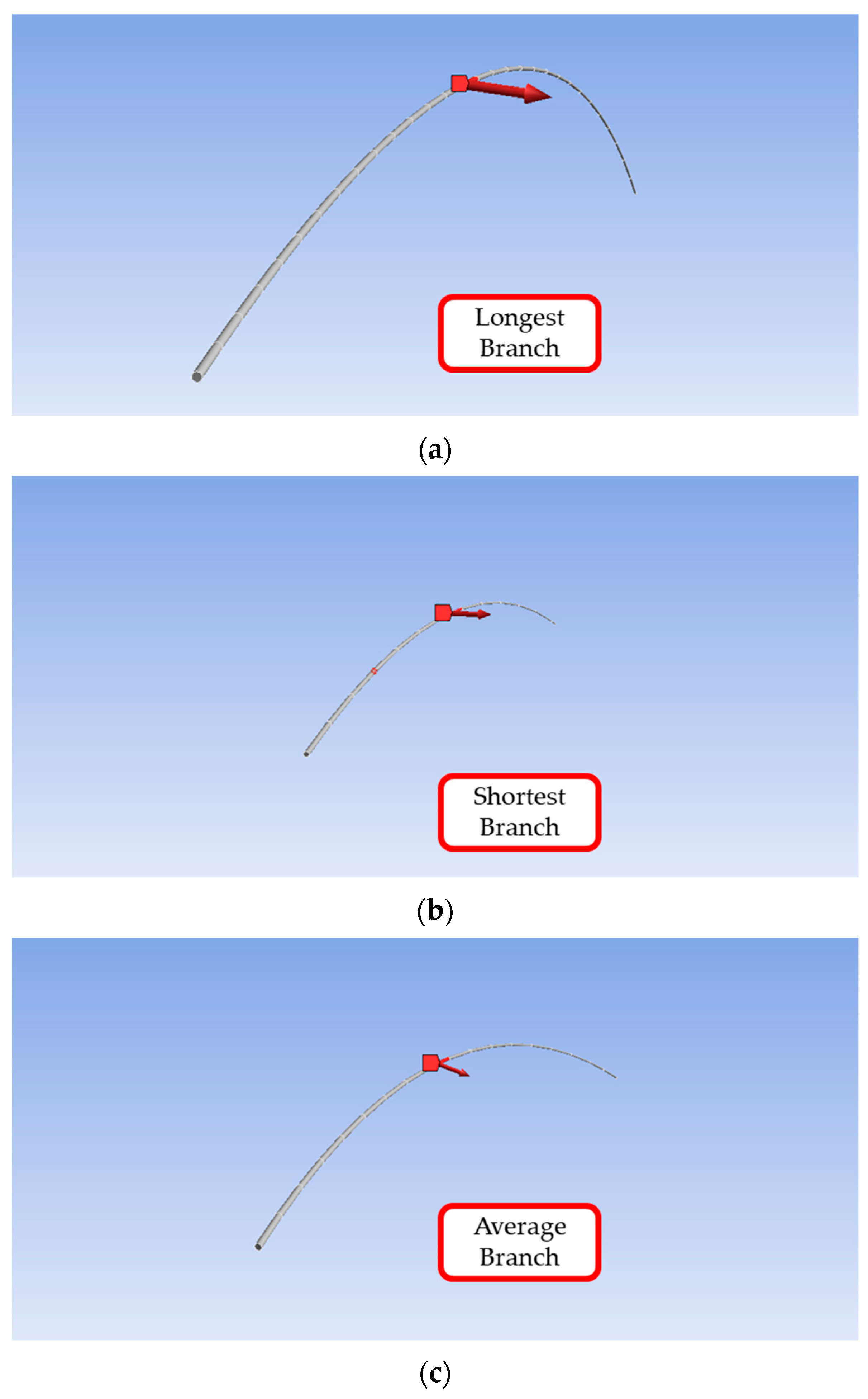
2.3. Modal Analysis and Harmonic Response Analysis
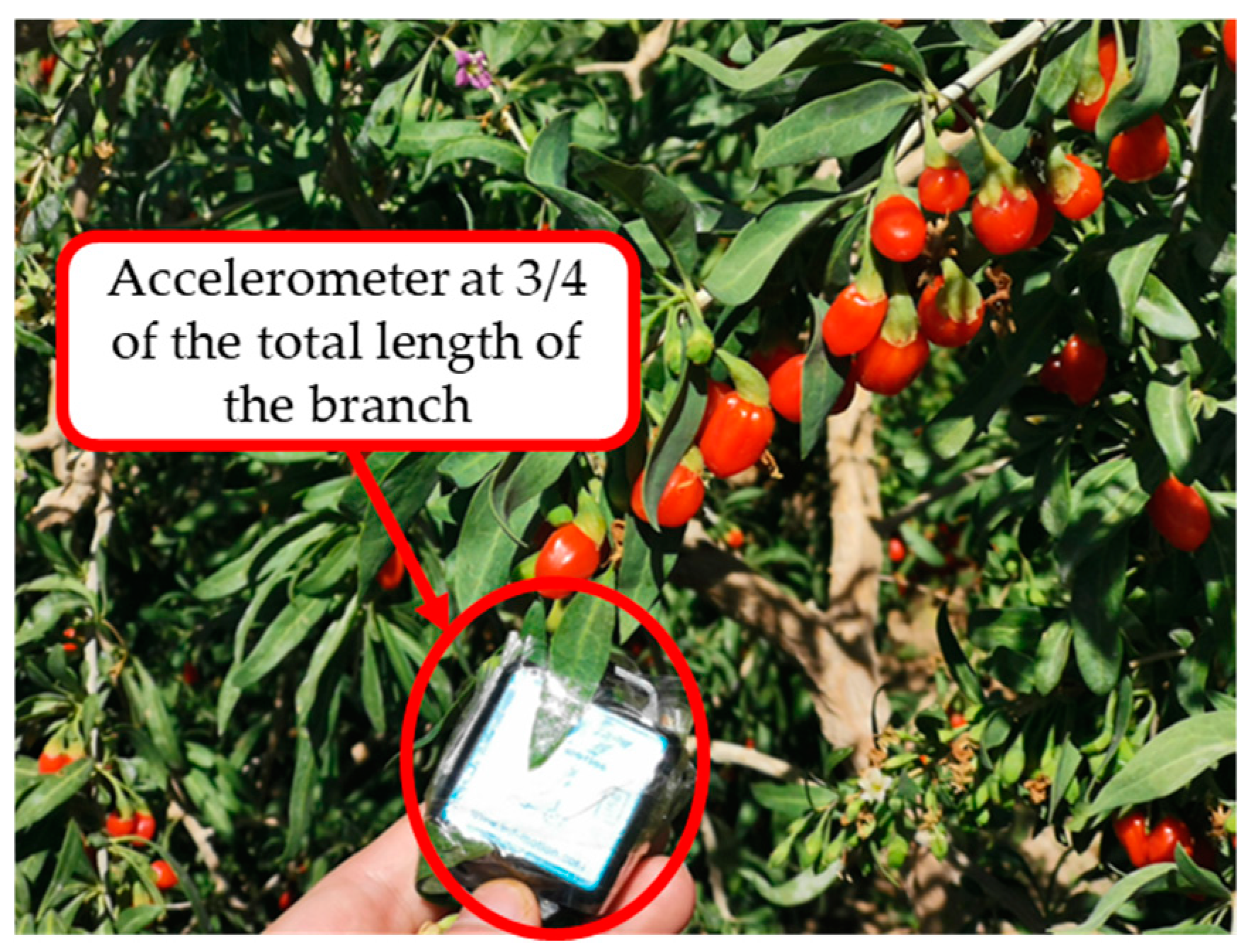
2.4. Field Tests on the Kinetic Characteristics of Branches Using Vibration Harvesting Equipment
3. Results
3.1. Physical Tests Results
3.2. Results of Modal Analysis and Harmonic Response Analysis
3.2.1. Results of Modal Analysis
3.2.2. Results of Harmonic Response Analysis
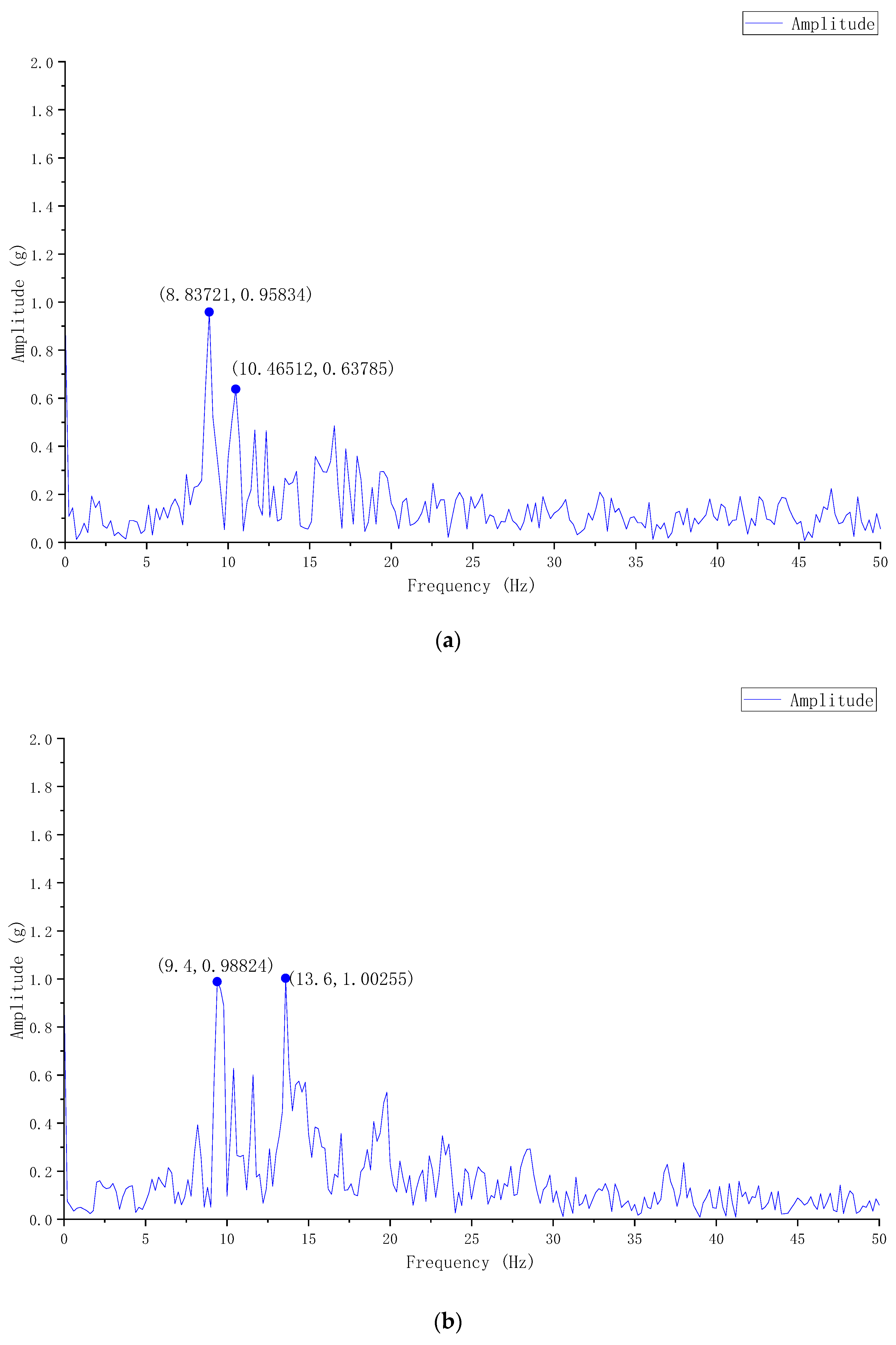
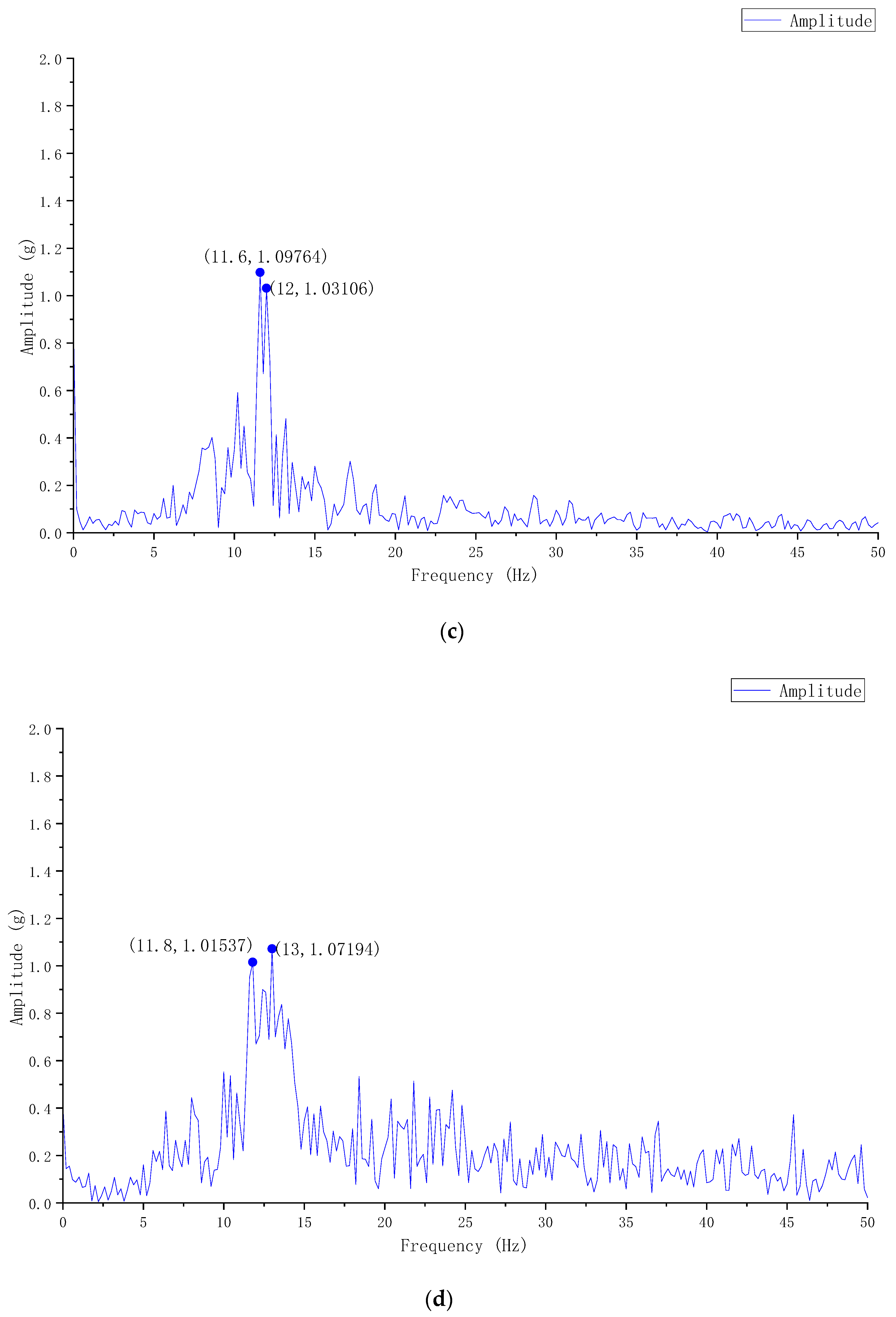
3.3. Results of the Field Tests
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, J.; Chen, J. Detecting Maturity in Fresh Lycium barbarum L. Fruit Using Color Information. Horticulturae 2021, 7, 108. [Google Scholar] [CrossRef]
- Gao, Z.; Chen, Q.; Hu, G.; Chen, C.; Li, C.; Chen, J. Design and test of self-propelled straddle-type Lycium barbarum L. spraying machine. INMATEH 2021, 65, 345–354. [Google Scholar] [CrossRef]
- Zhao, J.; Ma, T.; Inagaki, T.; Chen, Q.; Gao, Z.; Sun, L.; Cai, H.; Chen, C.; Li, C.; Zhang, S.; et al. Finite Element Method Simulations and Experiments of Detachments of Lycium barbarum L. Forests 2021, 12, 699. [Google Scholar] [CrossRef]
- Zhao, J.; Chen, Y.; Wang, Y.; Chen, J. Design and Experimental Study on Feeding and Shunting System of Sugarcane Harvester. J. Agric. Mech. Res. 2019, 41, 176–182. [Google Scholar]
- Zhang, Z.; Xiao, H.; Ding, W.; Hai, S. Mechanism simulation analysis and prototype experiment of Lycium barbarum harvest by vibration mode. Trans. Chin. Soc. Agric. Eng. 2015, 31, 20–28. [Google Scholar]
- Chen, J.; Zhao, J.; Chen, Y.; Bu, L.; Hu, G.; Zhang, E. Design and Experiment on Vibrating and Comb Brushing Harvester for Lycium barbarum. Trans. Chin. Soc. Agric. Mach. 2019, 50, 152–161+95. [Google Scholar]
- Xu, L.; Chen, J.; Wu, G.; Yuan, Q.; Ma, S.; Yu, C.; Duan, Z.; Xing, J.; Liu, X. Design and operating parameter optimization of comb brush vibratory harvesting device for wolfberry. Trans. Chin. Soc. Agric. Eng. 2018, 34, 75–82. [Google Scholar]
- Ding, X. Mechanical Design for Chinese Wolfberry Organic Fertilizer Deep Homework. MET 2018, 7, 70–79. [Google Scholar] [CrossRef]
- Geng, R.; Zhang, T.; Luo, H.; Yang, L. Analysis of the development trend of agricultural machinery in China. Trans. Chin. Soc. Agric. Mach. 2004, 4, 208–210. [Google Scholar]
- Song, J.; Zhang, T.; Xu, l.; Yang, X. Research Actuality and Prospect of Picking Robot for Fruits and Vegetables. Trans. Chin. Soc. Agric. Mach. 2006, 37, 158–162. [Google Scholar]
- Zhao, Y.; Wu, C.; Hu, X.; Yu, G. Research progress and problems of agricultural robot. Trans. Chin. Soc. Agric. Eng. 2003, 19, 20–24. [Google Scholar]
- Hu, M.; Wan, F.; Du, X.; Huang, X. Design of vibrating wolfberry picking machine. J. Chin. Agric. Mech. 2018, 39, 25–29. [Google Scholar]
- Liu, Y.; Fan, K.; Du, X. Design and experiment of vibrating machine for picking Lycium barbarum. For. Mach. Woodwork. Equip. 2021, 49, 39–43. [Google Scholar]
- Wang, R.; Zheng, Z.; Xu, L.; Wu, G.; Chen, J.; Yuan, Q.; Ma, S.; Yu, C.; Duan, Z.; Xing, J. Experimental Study on Air-suction Packing Parameters of Lycium barbarum. J. Agric. Mech. Res. 2019, 41, 165–171. [Google Scholar]
- Yu, Z.; Jiang, F.; Yang, J.; Yan, L.; Wu, J. Design and theoretical analysis of comb type Lycium barbarum picking machine. For. Mach. Woodwork. Equip. 2024, 52, 30–36. [Google Scholar]
- Zhang, W.; Li, Z.; Tan, Y.; Li, W. Optimal Design and Experiment on Variable Pacing Combing Brush Picking Device for Lycium barbarum. Trans. Chin. Soc. Agric. Mach. 2018, 49, 83–90. [Google Scholar]
- Sargent, S.A.; Takeda, F.; Williamson, J.G.; Berry, A.D. Harvest of Southern Highbush Blueberry with a Modified, Over-The-Row Mechanical Harvester: Use of Handheld Shakers and Soft Catch Surfaces. Agriculture 2020, 10, 4. [Google Scholar] [CrossRef]
- Fu, Y.; Sun, P.; Wang, Y. Optimization of Raspberry Vibration Harvesting Parameters. J. Agric. Mech. Res. 2016, 38, 141–144. [Google Scholar]
- Ding, H.; Li, M.; Peng, J.; Liu, Z. Experimental Study on the Vibration Parameters of Mulberry Picking. J. Agric. Mech. Res. 2016, 38, 183–186+212. [Google Scholar]
- Gao, Z.; Zhao, K.; Li, L.; Pang, G.; Wang, X. Design and experiment of suspended vibratory actuator for picking Camellia olerfera fruits. Trans. Chin. Soc. Agric. Eng. 2019, 35, 9–17. [Google Scholar]
- Lin, H.; Xu, L.; Zhou, H.; Xuan, Y.; Jia, Z.; Chen, Q. Relationship between frequency spectrum characteristics and vibration responses of Ginkgo biloba trees during mechanical harvesting operation. Trans. Chin. Soc. Agric. Eng. 2017, 33, 51–57. [Google Scholar]
- Zhao, J.; Tsuchikawa, S.; Ma, T.; Hu, G.; Chen, Y.; Wang, Z.; Chen, Q.; Gao, Z.; Chen, J. Modal Analysis and Experiment of a Lycium barbarum L. Shrub for Efficient Vibration Harvesting of Fruit. Agriculture 2021, 11, 519. [Google Scholar] [CrossRef]
- Bao, D.; Yang, C.; Zhao, Y.; Liu, X.; Guo, Y. Vibration Characteristics Analysis and Experiment of the Blueberry Shrub. J. Harbin Univ. Sci. Technol. 2018, 23, 18–22. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Longest | Shortest | Average |
|---|---|---|---|
| Thick End Diameter (mm) | 1.13 | 0.82 | 4.32 |
| Thin End Diameter (mm) | 6.09 | 3.56 | 1.11 |
| Length (mm) | 902 | 371 | 552 |
| Project | Value |
|---|---|
| Density (kg/m3) | 1021.6 |
| The Radial Elastic Moduli Ex and Ey (MPa) | 65.49 |
| The Axial Elastic Modulus Ez (MPa) | 498.59 |
| The Poisson’s Ratio uxy | 0.3 |
| The Poisson’s Ratio uyz | 0.17 |
| The Poisson’s Ratio uxz | 0.17 |
| The Axial Shear Modulus Gxy (MPa) | 25.19 |
| The Axial Shear Modulus Gyz and GxZ (MPa) | 6.63 |
| Project | Range of the Value | Average Value |
|---|---|---|
| Length of the Fruit-Bearing branch (mm) | 489~613 | 575 |
| Length of the Fruit-Bearing Area (mm) | 337~565 | 551.9 |
| Thick End Diameter (mm) | 3.864~6.445 | 4.32 |
| Thin End Diameter (mm) | 0.898~1.252 | 1.11 |
| Weight of Red Fruit (g) | 0.734~1.208 | 1.015 |
| Weight of Yellow Fruit (g) | 0.179~0.545 | 0.341 |
| Weight of Green Fruit (g) | 0.129~0.334 | 0.168 |
| Binding Force of Red Fruit (N) | 0.28~1.29 | 0.59 |
| Binding Force of Yellow Fruit (N) | 0.63~3.20 | 1.28 |
| Binding Force of Green Fruit (N) | 0.68~2.39 | 1.17 |
| Rank | The Longest Branch’s Frequency (Hz) | The Shortest Branch’s Frequency (Hz) | The Average Branch’s Frequency (Hz) |
|---|---|---|---|
| 1 | 0.58362 | 1.9946 | 0.99723 |
| 2 | 0.59644 | 2.0812 | 1.1198 |
| 3 | 0.99122 | 3.8342 | 2.8027 |
| 4 | 1.1347 | 4.2994 | 2.941 |
| 5 | 2.3156 | 9.0007 | 5.236 |
| 6 | 2.5706 | 10.012 | 5.5579 |
| 7 | 4.4582 | 17.43 | 9.424 |
| 8 | 4.6448 | 18.28 | 9.8064 |
| 9 | 6.9348 | 27.697 | 15.356 |
| 10 | 7.0448 | 27.959 | 16.045 |
| Project | Picking Rate | Damage Rate | Efficiency (Piece/s) |
|---|---|---|---|
| Test 1 | 96.91 | 2.13 | 6.23 |
| Test 2 | 96.63 | 2.33 | 6.53 |
| Test 3 | 97.56 | 1.25 | 5.74 |
| Test 4 | 91.14 | 2.78 | 6.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Wu, J.; Jiang, F.; Xing, H.; Yan, L.; Yang, J. Kinematic Analysis of the Vibration Harvesting Process of Lycium barbarum L. Fruit. Agriculture 2024, 14, 1715. https://doi.org/10.3390/agriculture14101715
Yu Z, Wu J, Jiang F, Xing H, Yan L, Yang J. Kinematic Analysis of the Vibration Harvesting Process of Lycium barbarum L. Fruit. Agriculture. 2024; 14(10):1715. https://doi.org/10.3390/agriculture14101715
Chicago/Turabian StyleYu, Ziheng, Jian Wu, Fang Jiang, Hong Xing, Lei Yan, and Jianhua Yang. 2024. "Kinematic Analysis of the Vibration Harvesting Process of Lycium barbarum L. Fruit" Agriculture 14, no. 10: 1715. https://doi.org/10.3390/agriculture14101715
APA StyleYu, Z., Wu, J., Jiang, F., Xing, H., Yan, L., & Yang, J. (2024). Kinematic Analysis of the Vibration Harvesting Process of Lycium barbarum L. Fruit. Agriculture, 14(10), 1715. https://doi.org/10.3390/agriculture14101715