
Artificial Neural Network Model for Predicting Carrot Root Yield Loss in Relation to Mechanical Heading

 ,
,  , and
, and
Abstract
1. Introduction
2. Materials and Methods
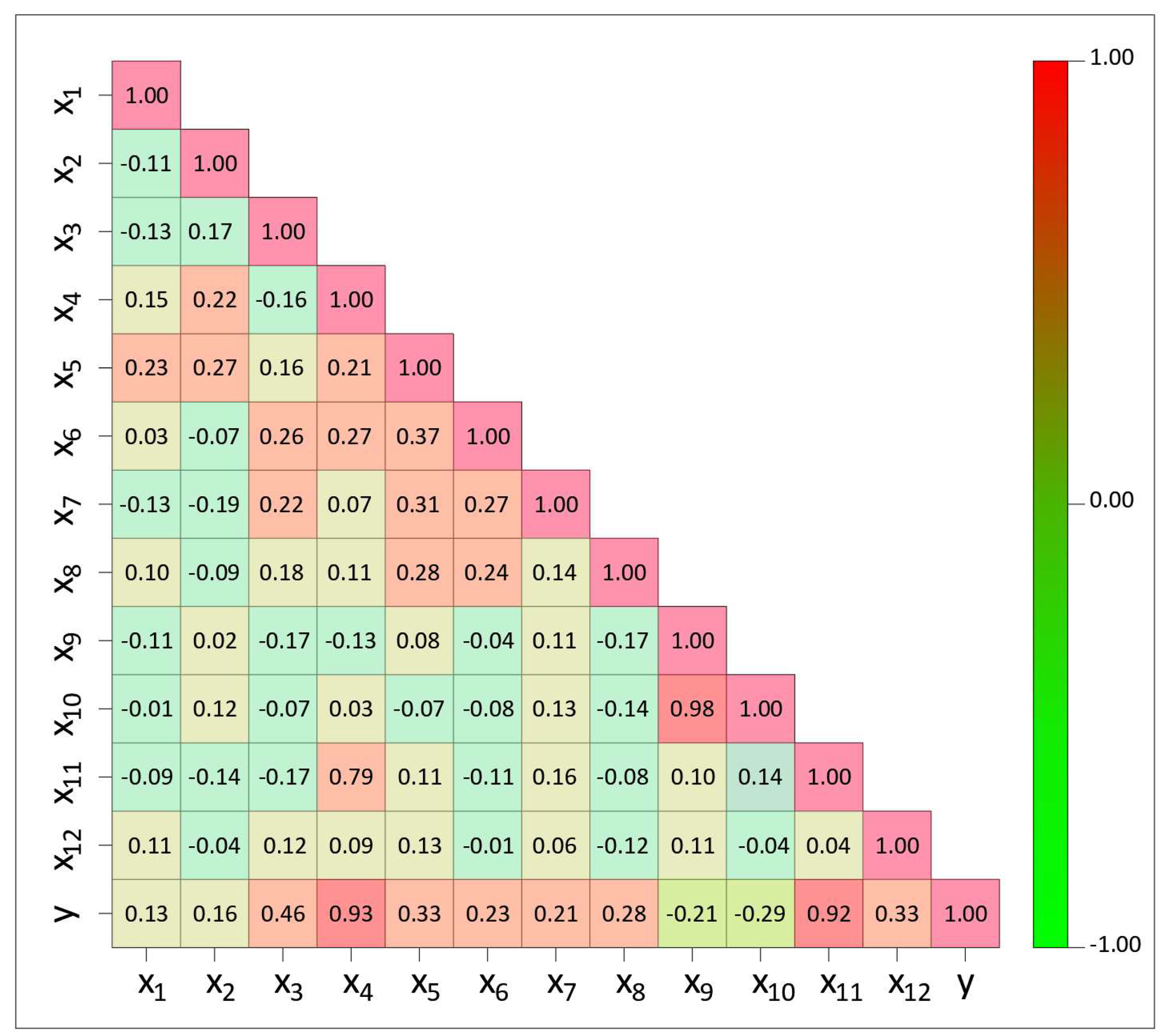
2.1. Definition of Criteria for Predicting Carrot Root Yield Loss
2.2. Dataset Preparation
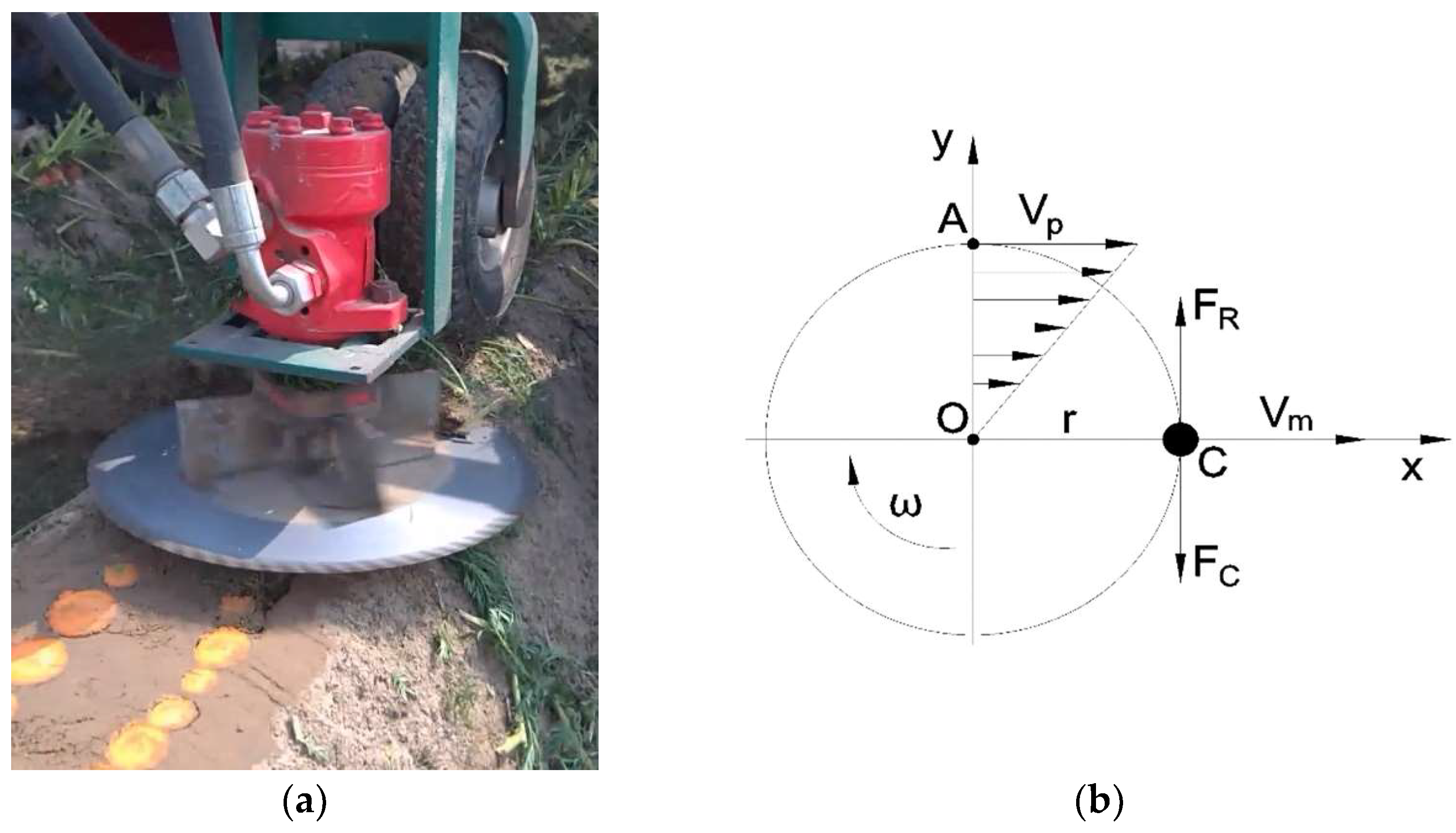
2.3. Design of a Carrot Root Heading Machine
2.4. Predictive Model for Carrot Root Yield Loss
- -
- Mean error:
- -
- Absolute mean error:
- -
- Standard deviation:
- -
- Normalised standard deviation:
- -
- Error variance:
- -
- Mean absolute percentage error:
- -
- the learning set is representative of the modelled yield loss prediction, taking into account the criteria considered;
- -
- the number of learning cases exceeds the number of connections in the network (number of network weights) by a factor of ten;
- -
- the learning process is completed when the minimum error on the test set is reached.
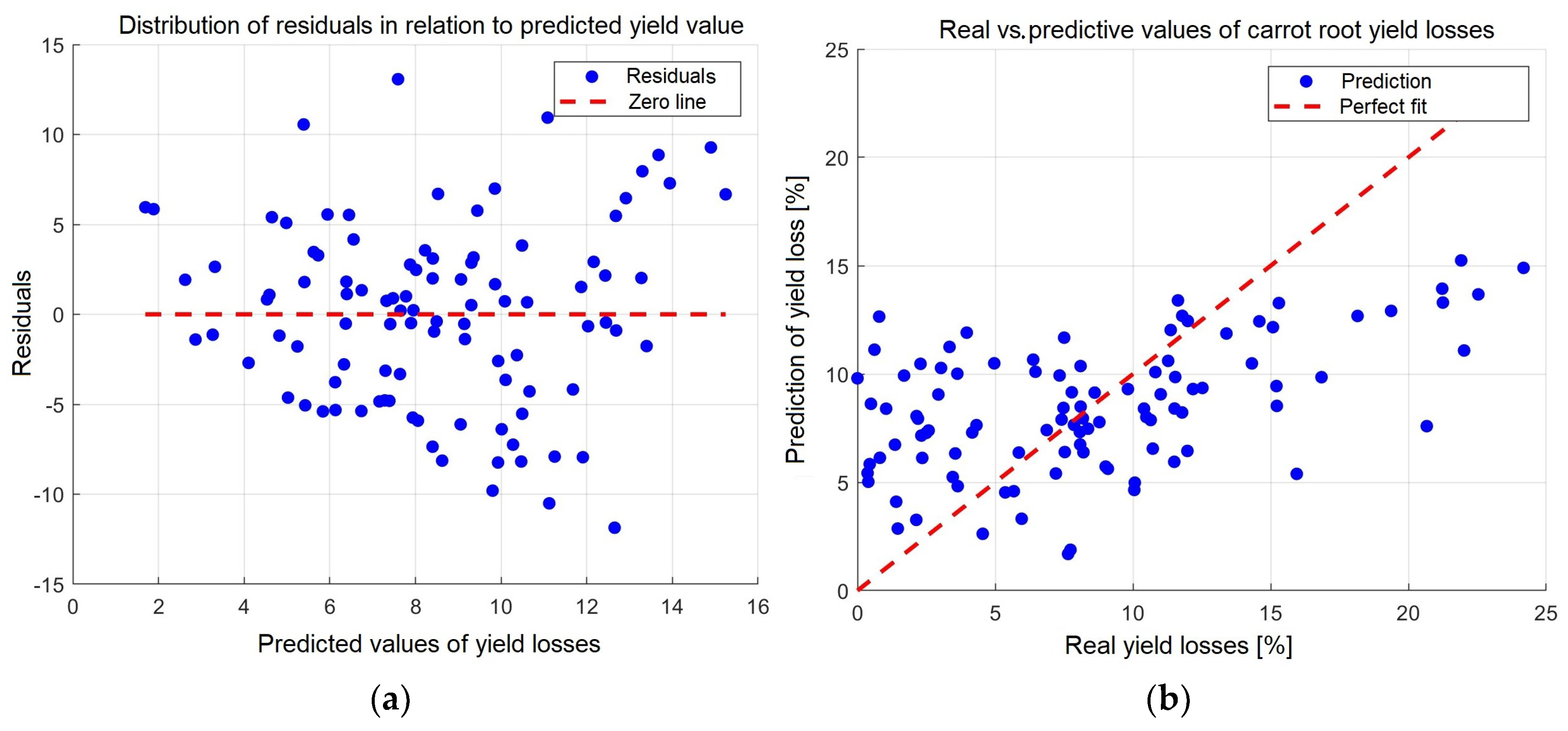
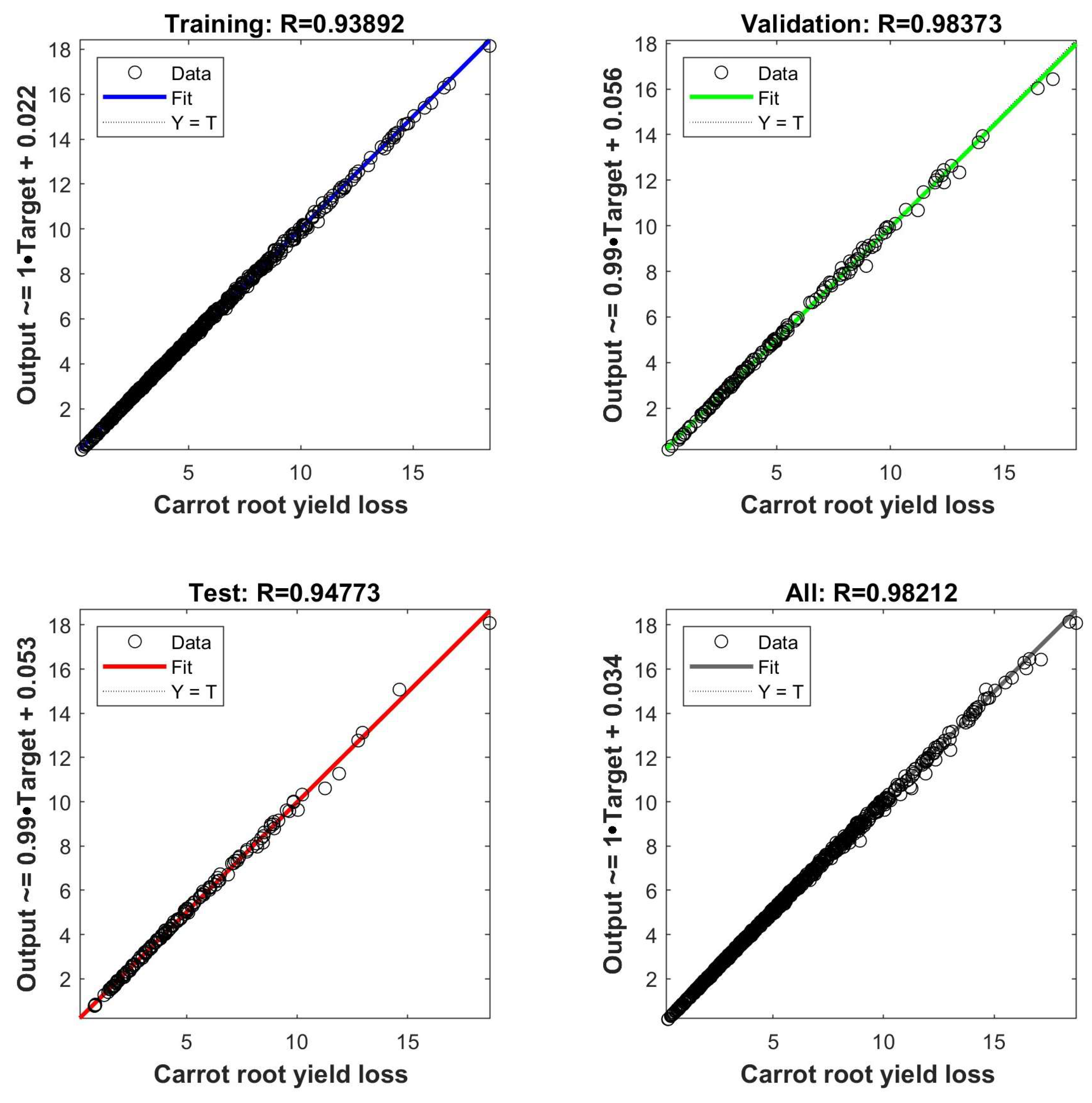
3. Results
4. Discussion
5. Conclusions
6. Patents
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Xie, W.; Wang, F.; Yang, D. Research on Carrot Grading Based on Machine Vision Feature Parameters. IFAC PapersOnLine 2019, 52, 30–35. [Google Scholar] [CrossRef]
- Jahanbakhshi, A.; Kheiralipour, K. Evaluation of image processing technique and discriminant analysis methods in postharvest processing of carrot fruit. Food Sci Nutr. 2020, 18, 3346–3352. [Google Scholar] [CrossRef] [PubMed]
- Szczepańska, J.; Barba, F.J.; Skąpska, S.; Marszałek, K. High pressure processing of carrot juice: Effect of static and multi-pulsed pressure on the polyphenolic profile, oxidoreductases activity and colour. Food Chem. 2020, 307, 125549. [Google Scholar] [CrossRef] [PubMed]
- Eurostat. Available online: https://european-union.europa.eu/index_en (accessed on 25 May 2024).
- Luo, T.; Li, S.; Li, J.; Guo, J.; Feng, R.; Mu, Y.; Hu, T.; Sun, Y.; Guo, Y.; Gong, H. Image Fuzzy Edge Information Segmentation Based on Computer Vision and Machine Learning. J. Grid Comput. 2023, 21, 56. [Google Scholar] [CrossRef]
- Lokesh, Y.; Rithvik, M.; Madhavi, M.; Madhu, S.; Rajeshwar Rao, K. Image Classification Using CNN with CIFAR-10 Dataset. Int. J. Res. Appl. Sci. Eng. Technol. 2024, 12, 229–231. [Google Scholar] [CrossRef]
- Bankar, R.; Bargat, N.; Hanmante, I.; Dakore, H. Face Recognition Using Facenet Deep Learning Network for Attendance System. Int. J. Sci. Res. Comput. Sci. Eng. Inf. Technol. 2022, 8, 458–463. [Google Scholar] [CrossRef]
- Lemley, J.; Bazrafkan, S.; Corcoran, P. Deep learning for consumer devices and services: Pushing the limits for machine learning, artificial intelligence, and computer vision. IEEE Consum. Electron. Mag. 2017, 6, 48–56. [Google Scholar] [CrossRef]
- Lemley, J.; Bazrafkan, S.; Corcoran, P. Smart augmentation learning an optimal data augmentation strategy. IEEE Access. 2017, 5, 5858–5869. [Google Scholar] [CrossRef]
- Davoudi Kakhki, F.; Freeman, S.A.; Mosher, G.A. Use of Neural Networks to Identify Safety Prevention Priorities in Agro-Manufacturing Operations within Commercial Grain Elevators. Appl. Sci. 2019, 9, 4690. [Google Scholar] [CrossRef]
- Li, C.; Lu, Y.; Bian, Y.; Tian, J.; Yuan, M. Design of Safety Evaluation and Risk Traceability System for Agricultural Product Quality. Appl. Sci. 2024, 14, 2980. [Google Scholar] [CrossRef]
- Lu, R.; Wei, R.; Zhang, J. Human-computer interaction based on speech recognition. Appl. Comput. Eng. 2024, 36, 102–110. [Google Scholar] [CrossRef]
- Sainath, T.; Mohamed, A.R.; Kingsbury, B.; Ramabhadran, B. Deep convolutional neural networks for LVCSR. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 8614–8618. [Google Scholar]
- Collobert, R.; Weston, J.; Bottou, L.; Karlen, M.; Kavukcuoglu, K.; Kuksa, P. Natural Language Processing (Almost) from Scratch. J. Mach. Learn. Res. 2011, 12, 2493–2537. [Google Scholar]
- van den Oord, A.; Dieleman, S.; Zen, H.; Simonyan, K.; Vinyals, O.; Graves, A.; Kalchbrenner, N.; Senior, A.; Kavukcuoglu, K. WaveNet: A generative model for raw audio. arXiv 2016, arXiv:1609.03499v2. [Google Scholar]
- Zhou, J.; Troyanskaya, O.G. Predicting effects of noncoding variants with deep learning-based sequence model. Nat. Methods 2015, 12, 931–934. [Google Scholar] [CrossRef] [PubMed]
- Esteva, A.; Kuprel, B.; Novoa, R.A.; Ko, J.; Swetter, S.M.; Blau, H.M.; Thrun, S. Dermatologist-Level Classification of Skin Cancer with Deep Neural Networks. Nature 2017, 542, 115–118. [Google Scholar] [CrossRef] [PubMed]
- Jermyn, M.; Mok, K.; Mercier, J.; Desroches, J.; Pichette, J.; Saint-Arnaud, K.; Bernstein, L.; Guiot, M.K.; Petrecca, K.; Leblond, F. Intraoperative brain cancer detection with Raman spectroscopy in humans. Sci. Transl. Med. 2015, 7, 274ra19. [Google Scholar] [CrossRef]
- Wang, K.; Wu, F.; Seo, B.R.; Fischbach, C.; Chen, W.; Hsu, L.; Gourdon, D. Breast Cancer Cells Alter the Dynamics of Stromal Fibronectin-Collagen Interactions. Matrix Biol. 2016, 60–61, 86–95. [Google Scholar] [CrossRef]
- Levine, S.; Pastor, P.; Krizhevsky, A.; Ibarz, J.; Quillen, D. Learning hand-eye coordination for robotic grasping with deep learning and large-scale data collection. Int. J. Robot. Res. 2018, 37, 421–436. [Google Scholar] [CrossRef]
- Pfeiffer, M.; Schaeuble, M.; Nieto, J.; Siegwart, R.; Cadena, C. From perception to decision: A data-driven approach to end-to-end motion planning for autonomous ground robots. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Marina Bay Sands, Singapore, 29 May–3 June 2017; pp. 1527–1533. [Google Scholar]
- Gupta, S.; Davidson, J.; Levine, S.; Sukthankar, R.; Malik, J. Cognitive Mapping and Planning for Visual Navigation. In Proceedings of the IEEE 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2616–2625. [Google Scholar]
- Shalev-Shwartz, S.; Shammah, S.; Shashua, A. Safe, Multi-Agent, Reinforcement Learning for Autonomous Driving. arXiv 2016, arXiv:1610.03295. [Google Scholar]
- Deng, L.; Du, H.; Han, Z. A Carrot Sorting System Using Machine Vision Technique. Appl. Eng. Agric. 2017, 33, 149–156. [Google Scholar] [CrossRef]
- Deng, L.; Li, J.; Han, Z. Online defect detection and automatic grading of carrots using computer vision combined with deep learning methods. LWT 2021, 149, 111832. [Google Scholar] [CrossRef]
- Rybacki, P.; Sawinska, Z.; Kačániová, M.; Kowalczewski, P.Ł.; Osuch, A.; Durczak, K. Convolutional neural network model for the qualitative evaluation of geometric shape of carrot root. Agric. Food Sci. 2024, 33, 40–54. [Google Scholar] [CrossRef]
- Xie, W.; Wei, S.; Yang, D. Morphological measurement for carrot based on three-dimensional reconstruction with a ToF sensor. Postharvest Biol. Technol. 2023, 197, 112216. [Google Scholar] [CrossRef]
- Abdulridha, J.; Ampatzidis, Y.; Kakarla, S.C.; Roberts, P. Detection of target spot and bacterial spot diseases in tomato using UAV-based and benchtop-based hyperspectral imaging techniques. Precis. Agric. 2020, 21, 955–978. [Google Scholar] [CrossRef]
- Rybacki, P.; Niemann, J.; Bahcevandziev, K.; Durczak, K. Convolutional neural network model for variety classification and seed quality assessment of winter rapeseed. Sensors 2023, 23, 2486. [Google Scholar] [CrossRef] [PubMed]
- Rybacki, P.; Niemann, J.; Derouiche, S.; Chetehouna, S.; Boulaares, I.; Seghir, N.M.; Diatta, J.; Osuch, A. Convolutional Neural Network (CNN) Model for the Classification of Varieties of Date Palm Fruits (Phoenix dactylifera L.). Sensors 2024, 24, 558. [Google Scholar] [CrossRef]
- Grinblat, G.L.; Uzal, L.C.; Larese, M.G.; Granitto, P.M. Deep learning for plant identification using vein morphological patterns. Comput. Electron. Agric. 2016, 127, 418–424. [Google Scholar] [CrossRef]
- Sun, D.; Robbins, K.; Morales, N.; Shu, Q.; Cen, H. Advances in optical phenotyping of cereal crops. Trends Plant Sci. 2022, 27, 191–208. [Google Scholar] [CrossRef] [PubMed]
- Franco, M.O.K.; Suarez, W.T.; dos Santos, V.B.; Resque, I.S. A novel digital image method for determination of reducing sugars in aged and non-aged cachaças employing a smartphone. Food Chem. 2021, 338, 127800. [Google Scholar] [CrossRef]
- Li, L.; Wang, Y.; Jin, S.; Li, M.; Chen, Q.; Ning, J.; Zhang, Z. Evaluation of black tea by using smartphone imaging coupled with micro-near-infrared spectrometer. Spectrochim. Acta Part A 2021, 246, 118991. [Google Scholar] [CrossRef]
- Minz, P.; Sawhney, I.K.; Saini, C.S. Algorithm for processing high definition images for food colourimetry. Measurement 2020, 158, 107670. [Google Scholar] [CrossRef]
- Meenu, M.; Cai, Q.; Xu, B. A critical review on analytical techniques to detect adulteration of extra virgin olive oil. Trends Food Sci. Technol. 2019, 91, 391–408. [Google Scholar] [CrossRef]
- Vithu, P.; Moses, J.A. Machine vision system for food grain quality evaluation: A review. Trends Food Sci. Technol. 2016, 56, 13–20. [Google Scholar] [CrossRef]
- Ramirez-Paredesa, J.P.; Hernandez-Belmonteb, U.H. Visual quality assessment of malting barley using color, shape and texture descriptors. Comput. Electron. Agric. 2020, 168, 105110. [Google Scholar] [CrossRef]
- Hashim, N.; Onwude, D.I.; Maringgal, B. Chapter 15— Technological advances in postharvest management of food grains. In Research and Technological Advances in Food Science; Elsevier: Amsterdam, The Netherlands, 2021; pp. 371–406. [Google Scholar] [CrossRef]
- Hendrawan, Y.; Rohmatulloh, B.; Prakoso, I.; Liana, V.; Fauzy, M.R.; Damayanti, R.; Hermanto, M.B.; Al Riza, D.F.; Sandra, M.S. Classification of soybean tempe quality using deep learning. IOP Conf. Ser. Earth Environ. Sci. 2021, 924, 012022. [Google Scholar] [CrossRef]
- Xie, W.; Wei, S.; Zheng, Z.; Yang, D. A CNN-based lightweight ensemble model for detecting defective carrots. Biosyst. Eng. 2021, 208, 287–299. [Google Scholar] [CrossRef]
- Bhupendra, M.K.; Miglani, A.; Kankar, P.K. Deep CNN-based damage classification of milled rice grains using a high-magnification image dataset. Comput. Electron. Agric. 2022, 195, 106811. [Google Scholar] [CrossRef]
- Ni, J.; Liu, B.; Li, J.; Gao, J.; Yang, H.; Han, Z. Detection of Carrot Quality Using DCGAN and Deep Network with Squeeze-and-Excitation. Food Anal. Methods 2022, 15, 1432–1444. [Google Scholar] [CrossRef]
- Zhang, J.; Qu, M.; Gong, Z.; Cheng, F. Online double-sided identification and eliminating system of unclosed-glumes rice seed based on machine vision. Measurement 2022, 187, 110252. [Google Scholar] [CrossRef]
- Ahmed, I.; Yadav, P.K. Predicting Apple Plant Diseases in Orchards Using Machine Learning and Deep Learning Algorithms. SN Comput. Sci. 2024, 5, 700. [Google Scholar] [CrossRef]
- Hema Swathi, S.; Swetha, B.; Rohini, N.; Subalakshmi, V. Weed Remover Using Machine Learning. Int. J. Adv. Res. Sci. Technol. 2024, 13, 1308–1312. [Google Scholar] [CrossRef]
- Felix, F.C.; Kratz, D.; Ribeiro, R.; Nogueira, A.C. Machine learning in the identification of native species from seed image analysis. J. Seed Sci. 2024, 46, e202446002. [Google Scholar] [CrossRef]
- Mahajan, S.; Das, A.; Sardana, H.K. Image acquisition techniques for assessment of legume quality. Trends Food Sci. Technol. 2015, 42, 116–133. [Google Scholar] [CrossRef]
- Patrício, D.I.; Rieder, R. Computer vision and artificial intelligence in precision agriculture for grain crops: A systematic review. Comput. Electron. Agric. 2018, 153, 69–81. [Google Scholar] [CrossRef]
- Rybacki, P.; Przygodziński, P.; Osuch, A.; Blecharczyk, A.; Walkowiak, R.; Osuch, E.; Kowalik, I. The Technology of Precise Application of Herbicides in Onion Field Cultivation. Agriculture 2021, 11, 577. [Google Scholar] [CrossRef]
- Rybacki, P.; Przygodziński, P.; Blecharczyk, A.; Kowalik, I.; Osuch, A.; Osuch, E. Strip spraying technology for precise herbicide application in carrot fields. Open Chem. 2022, 20, 287–296. [Google Scholar] [CrossRef]
- Batchelor, M.M.; Searcy, S.W. Computer vision determination of the stem/root joint on processing carrots. J. Agric. Eng. Res. 1989, 43, 259–269. [Google Scholar] [CrossRef]
- Howarth, M.S. Reflectance characteristics of fresh-market carrots. Trans. ASAE 1990, 33, 0961–0964. [Google Scholar] [CrossRef]
- Howarth, M.S.; Searcy, S.W. Fresh market carrot inspection by machine vision. Opt. Agric. 1991, 1379, 141–150. [Google Scholar] [CrossRef]
- Howarth, M.S.; Brandon, J.R.; Searcy, S.W.; Kehtarnavaz, N. Estimation of tip shape for carrot classification by machine vision. J. Agric. Eng. Res. 1992, 53, 123–139. [Google Scholar] [CrossRef]
- Hahn, F.; Sanchez, S. Carrot volume evaluation using imaging algorithms. J. Agric. Eng. Res. 2000, 75, 243–249. [Google Scholar] [CrossRef]
- Zhu, H.; Deng, L.; Wang, D.; Gao, J.; Ni, J.; Han, Z. Identifying carrot appearance quality by transfer learning. J. Food Process Eng. 2019, 42, e13187. [Google Scholar] [CrossRef]
- Ni, J.; Li, J.; Deng, L.; Han, Z. Intelligent detection of appearance quality of carrot grade using knowledge distillation. Trans. CSAE 2020, 36, 181–187. [Google Scholar] [CrossRef]
- Wei, M.C.F.; Maldaner, L.F.; Ottoni, P.M.N.; Molin, J.P. Carrot Yield Mapping: A Precision Agriculture Approach Based on Machine Learning. AI 2020, 1, 229–241. [Google Scholar] [CrossRef]
- de Lima Silva, Y.K.; Furlani, C.E.A.; Canata, T.F. AI-Based Prediction of Carrot Yield and Quality on Tropical Agriculture. AgriEngineering 2024, 6, 361–374. [Google Scholar] [CrossRef]
- Madugundu, R.; Al-Gaadi, K.A.; Tola, E.; Edrris, M.K.; Edrees, H.F.; Alameen, A.A. Optimal Timing of Carrot Crop Monitoring and Yield Assessment Using Sentinel-2 Images: A Machine-Learning Approach. Appl. Sci. 2024, 14, 3636. [Google Scholar] [CrossRef]
- Ulyanov, V.V. From Classical to Modern Nonlinear Central Limit Theorems. Mathematics 2024, 12, 2276. [Google Scholar] [CrossRef]
- Soundararajan, K.; Xu, M.W. Central limit theorems for random multiplicative functions. J. D’anal. Math. 2023, 151, 343–374. [Google Scholar] [CrossRef]
- Suarez, L.A.; Robson, A.; McPhee, J.; O’Halloran, J.; van Sprang, C. Accuracy of carrot yield forecasting using proximal hyperspectral and satellite multispectral data. Precis. Agric. 2020, 21, 1304–1326. [Google Scholar] [CrossRef]
- Suarez, L.A.; Robertson-Dean, M.; Brinkhoff, J.; Robson, A. Forecasting carrot yield with optimal timing of Sentinel 2 image acquisition. Precis. Agric. 2024, 25, 570–588. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Criteria | Unit | Range of Values |
|---|---|---|---|
| x1 | Distance between carrot roots in a row | m | 0.000–0.200 |
| x2 | Distance between carrot roots in a row on a ridge | m | 0.030–0.070 |
| x3 | Heading height of carrot roots | m | 0.000–0.055 |
| x4 | Height of the head above the soil surface | m | 0.000–0.055 |
| x5 | Carrot root yield per 9 m2 area | kg·m−2 | 86.230–94.010 |
| x6 | Weight of a single carrot root | kg | 0.100–0.342 |
| x7 | Diameter of a single carrot root | m | 0.020–0.047 |
| x8 | Length of a single carrot root | m | 0.100–0.270 |
| x9 | Angular speed of the disc | rad·s−1 | 4.710–75.880 |
| x10 | Progressive speed in rotary motion | m·s−1 | 1.649–26.559 |
| x11 | Height of disc above ridge surface | m | 0.000–0.025 |
| x12 | Machine progressive speed | m·s−1 | 0.417–0.972 |
| Variety of Carrot | Length of the Growing Season | Sowing Dates | Sowing Norm | Yield |
|---|---|---|---|---|
| [days] | [day.month] | [million seeds·ha−1] | [t·ha−1] | |
| Bangor | 110–120 | 01.04–15.06 | 0.7–1.2 | 110.0–130.0 |
| Komarno | 155–160 | 15.04–15.05 | 0.7–0.8 | 90.0–100.0 |
| Muleta | 150–160 | 01.04–30.04 | 0.7–0.8 | 95.0–100.0 |
| Warmia | 150–160 | 15.04–15.06 | 0.7–1.0 | 95.0–100.0 |
| Analysis of variance for multiple regression model | ||||
| Source | Degrees of freedom | Sum of squares | Mean square | F statistic |
| Model | 5 | 8953.634 | 1754.1443 | 3848.84 ** |
| Residual | 152 | 133.678 | 0.4103 | |
| Total | 164 | 8756.539 | ||
| Parameter estimation for multiple regression model | ||||
| Parameter | Estimation | Standard error | t statistic | |
| Intercept | 47.4713 | 7.5989 | 7.10 ** | |
| x1 | −0.0541 | 1.1521 | −66.43 ** | |
| x2 | −1.1772 | 0.0162 | −78.37 ** | |
| x3 | 6.5665 | 0.3451 | 22.24 ** | |
| x4 | 7.4795 | 0.2591 | 30.22 ** | |
| x5 | −1.3738 | 0.2343 | −6.34 ** | |
| x11 | 1.9862 | 0.0354 | 67.53 ** | |
| Statistics | Training Set | Test Set | Validation Set |
|---|---|---|---|
| SS | 0.1219 | 1.4133 | 1.3311 |
| MAE | 0.0015 | 0.0155 | 0.0225 |
| MSE | 0.0006 | 0.0186 | 0.0205 |
| RMS | 0.0651 | 0.1388 | 0.1468 |
| R2 | 0.9389 | 0.9477 | 0.9837 |
| SDR | 0.0044 | 0.0255 | 0.0345 |
| MAPE | 90.6900% | ||
| GE | 0.0931 t·ha−1 |
| Statistics | Training Set | Test Set | Validation Set |
|---|---|---|---|
| SS | 0.1223 | 1.4155 | 1.3378 |
| MAE | 0.0021 | 0.0175 | 0.0299 |
| MSE | 0.0016 | 0.0191 | 0.0345 |
| RMS | 0.0678 | 0.1401 | 0.1499 |
| R2 | 0.9409 | 0.9499 | 0.9887 |
| SDR | 0.0051 | 0.0297 | 0.0397 |
| MAPE | 90.0890% | ||
| GE | 0.0991 t·ha−1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rybacki, P.; Przygodziński, P.; Osuch, A.; Osuch, E.; Kowalik, I. Artificial Neural Network Model for Predicting Carrot Root Yield Loss in Relation to Mechanical Heading. Agriculture 2024, 14, 1755. https://doi.org/10.3390/agriculture14101755
Rybacki P, Przygodziński P, Osuch A, Osuch E, Kowalik I. Artificial Neural Network Model for Predicting Carrot Root Yield Loss in Relation to Mechanical Heading. Agriculture. 2024; 14(10):1755. https://doi.org/10.3390/agriculture14101755
Chicago/Turabian StyleRybacki, Piotr, Przemysław Przygodziński, Andrzej Osuch, Ewa Osuch, and Ireneusz Kowalik. 2024. "Artificial Neural Network Model for Predicting Carrot Root Yield Loss in Relation to Mechanical Heading" Agriculture 14, no. 10: 1755. https://doi.org/10.3390/agriculture14101755
APA StyleRybacki, P., Przygodziński, P., Osuch, A., Osuch, E., & Kowalik, I. (2024). Artificial Neural Network Model for Predicting Carrot Root Yield Loss in Relation to Mechanical Heading. Agriculture, 14(10), 1755. https://doi.org/10.3390/agriculture14101755