
Study on Deposition Characteristics of the Electrostatic Sprayer for Pesticide Application in Greenhouse Tomato Crops

Abstract
:1. Introduction
2. Materials and Methods
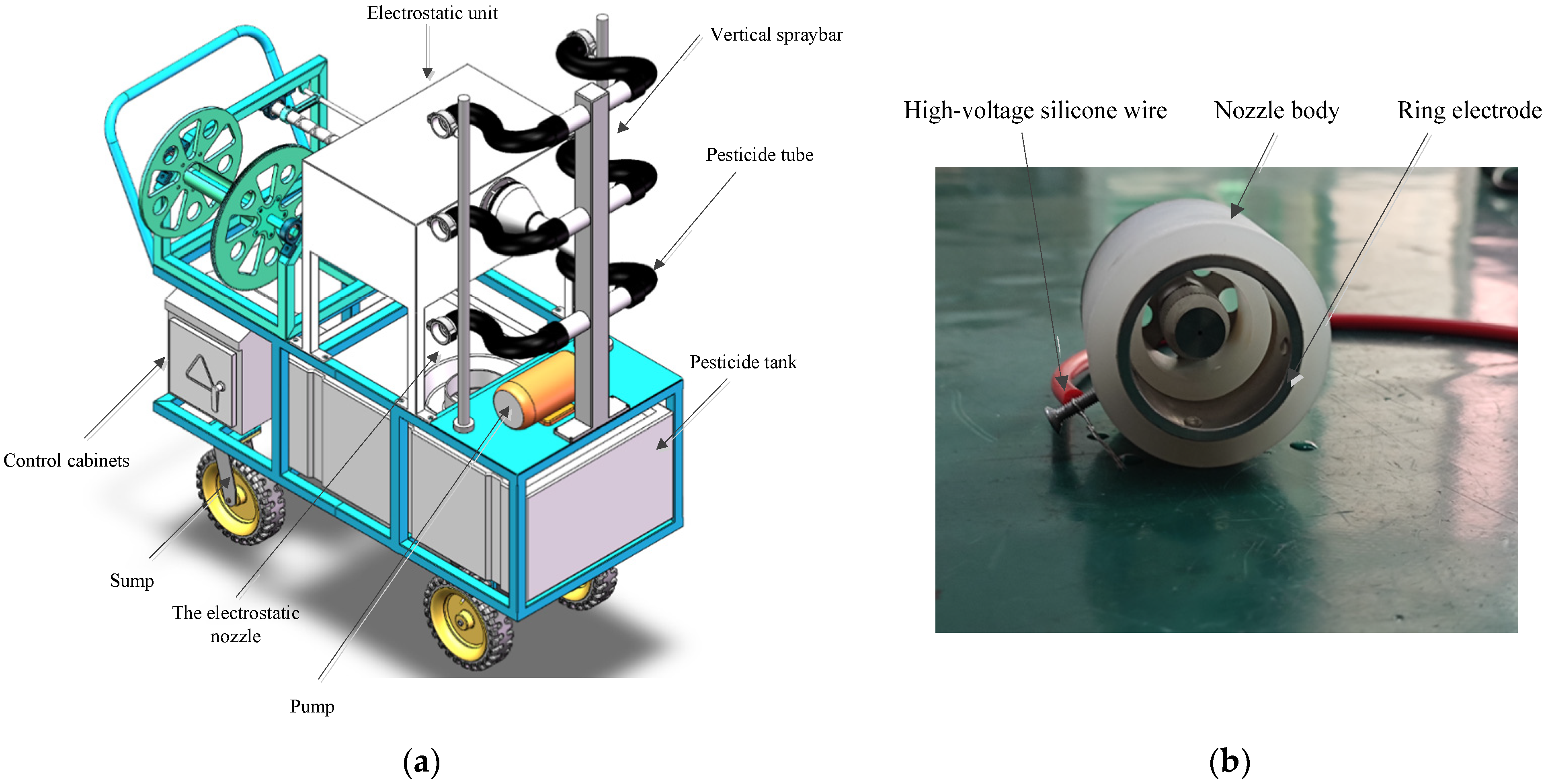
2.1. Design of the Self-Propelled Inter-Row Electrostatic Sprayer
2.2. Characteristics of Tomato Canopy and Equipment Description
2.3. Sampling and Measurement Methods for Greenhouse Electrostatic Spraying
2.3.1. Experimental Site
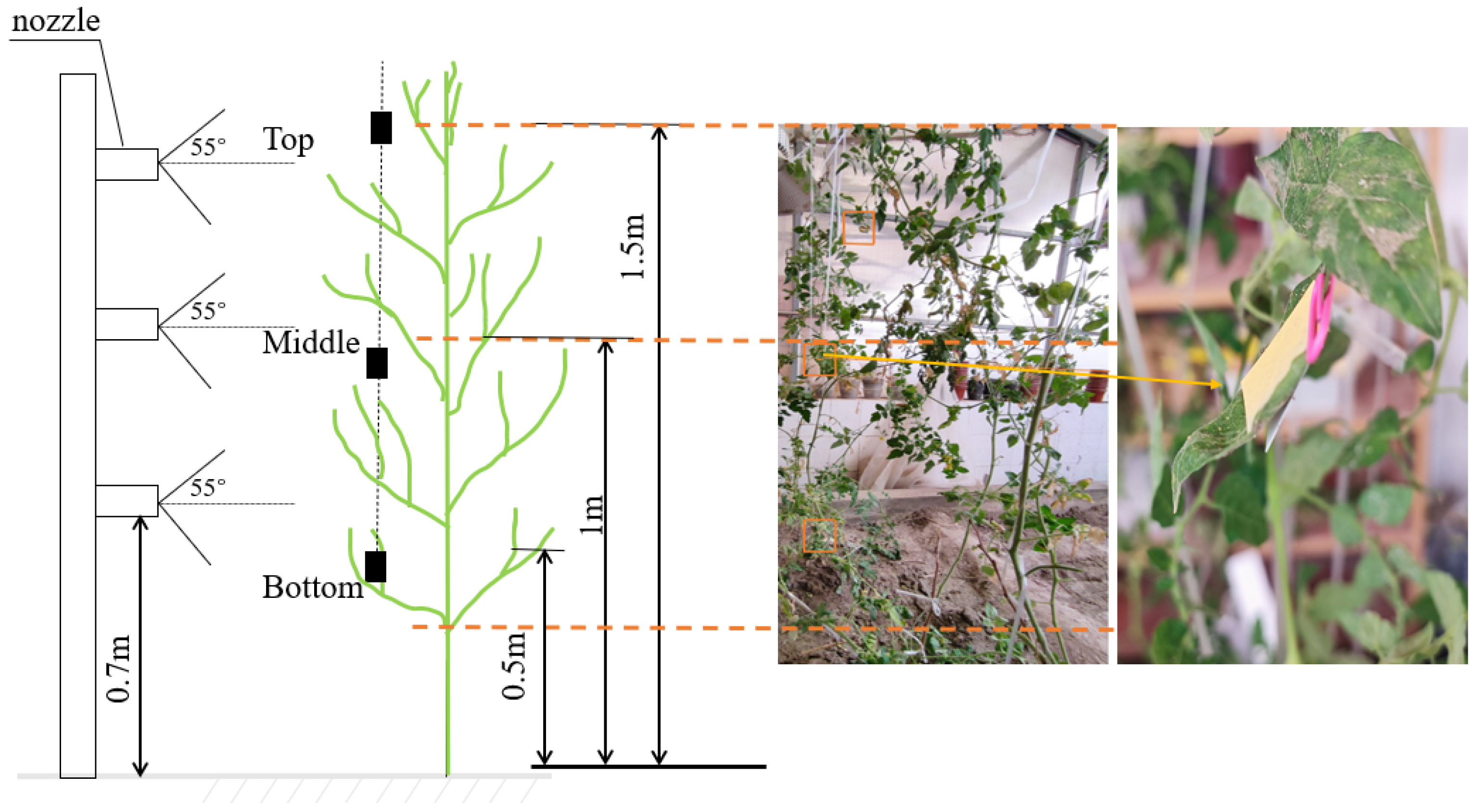
2.3.2. Sampling Point Layout
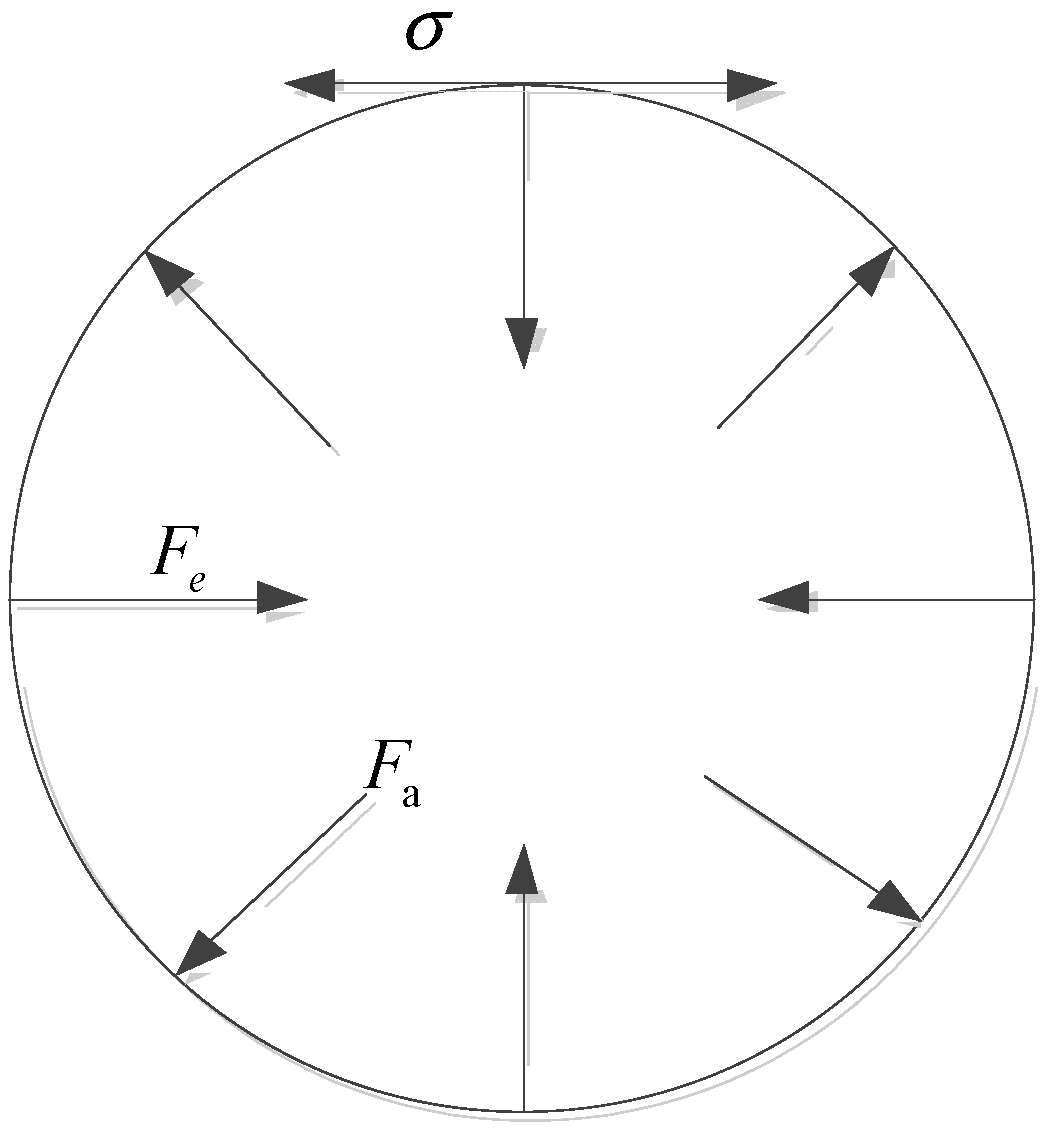
2.3.3. Theoretical Evaluation of Spray Chargeability
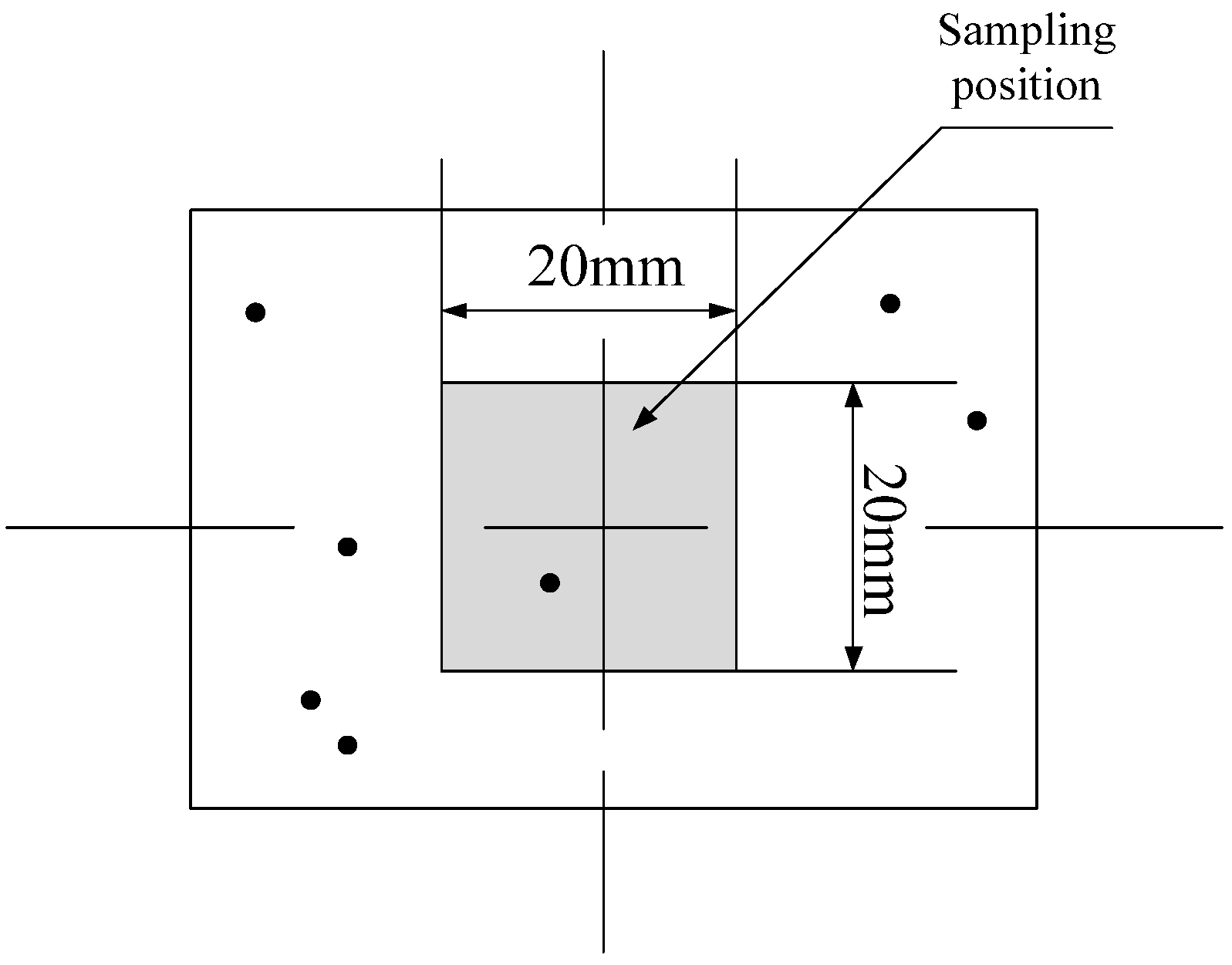
2.3.4. Measurement Method of Droplet Coverage Rate
3. Experiment Design
3.1. Single-Factor Simulation Experiment
- First, the pump pressure was set to 0.6 MPa, and the electrostatic generator voltage was adjusted to 6 kV. The selected spray distances were 25 cm, 50 cm, 75 cm, and 100 cm;
- Next, the electrostatic generator voltage remained at 6 kV, and the spray distance was fixed at 50 cm. The selected pump pressures were 0.4 MPa, 0.6 MPa, 0.8 MPa, and 1 MPa;
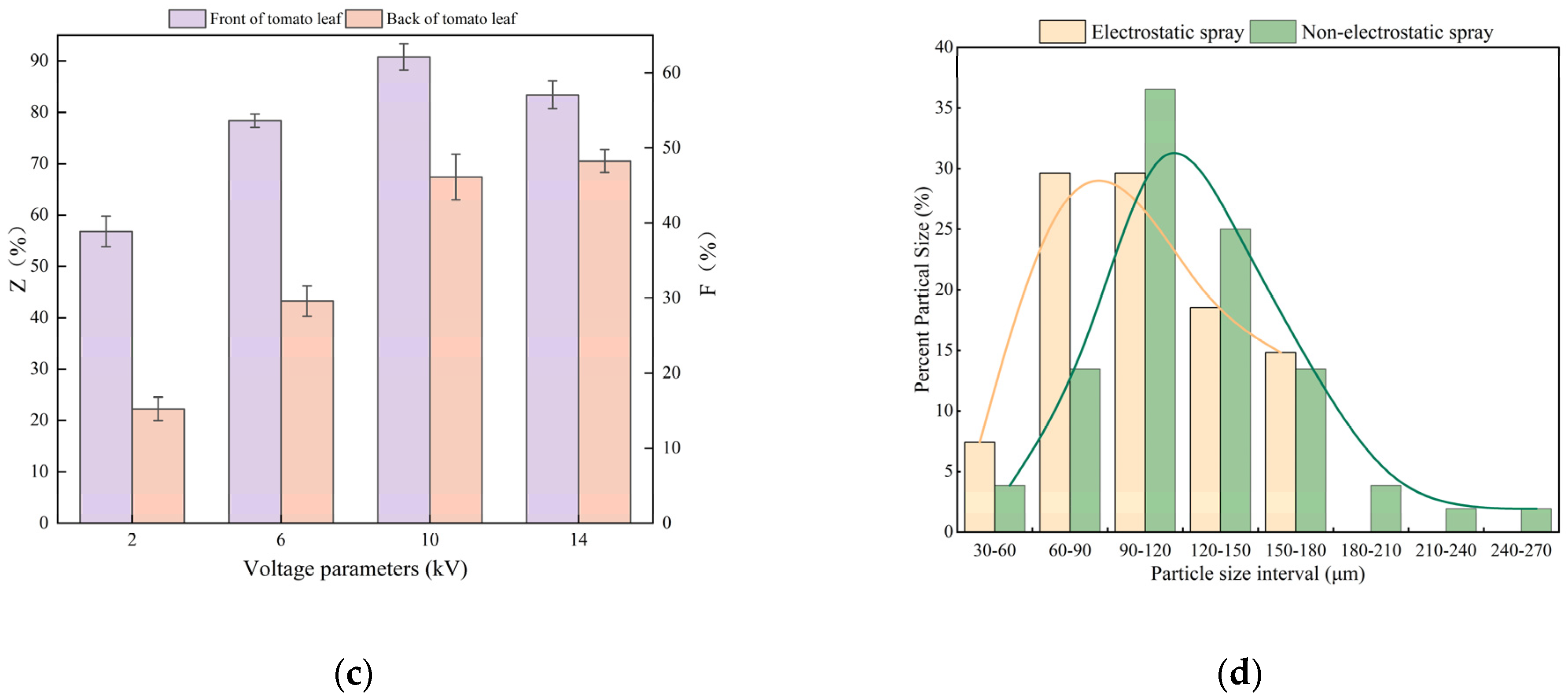
- Finally, the pump pressure was set to 0.6 MPa, and the spray distance was fixed at 50 cm, while the electrostatic generator voltages were adjusted to 2 kV, 6 kV, 10 kV, and 14 kV.
3.2. Multivariate Orthogonal Test Based on Box–Behnkenof Droplet Deposition in Greenhouse Tomato Crops
4. Results and Discussion
4.1. Single-Factor Experiment and Analysis
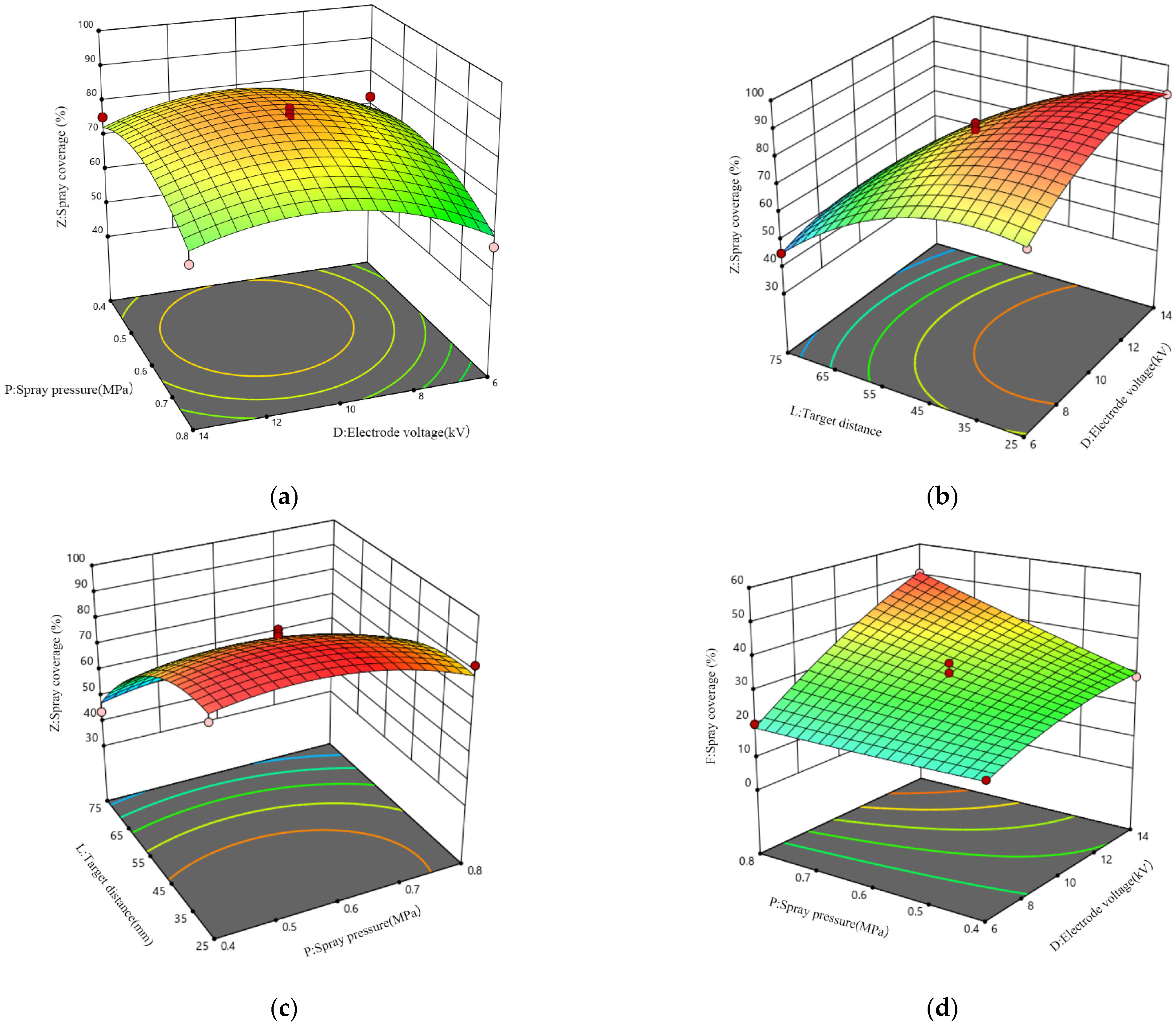
4.2. Analysis of Multivariate Orthogonal Test Based on Box–Behnkenof Droplet Deposition
- Z/F represents the droplet coverage rate (for the upper or lower leaf surfaces);
- L is the target distance, cm;
- D is the electrostatic voltage, kV;
- P is the working pressure, MPa.
4.3. Fitting Response Surface Method
4.4. Field Test Results Analysis
4.5. Applicability and Feasibility Analysis of Electrostatic Sprayer
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Facilities Agriculture Institute, Academy of Agricultural Planning and Engineering. Development status and Suggestions of facility horticultural equipment in China. J. Agric. Mach. Sci. Technol. Promot. 2019, 1, 27–28, 30. [Google Scholar]
- Jiang, Z.H.; Yang, H.M.; Yu, C. Research status and analysis of automatic target spraying technology for facility vegetables. Xinjiang Agric. Sci. 2021, 58, 1547–1557. [Google Scholar]
- Qiu, W.; Feng, C.; Han, R.J.; Feng, X.B.; Meng, P.B.; Wang, F.K. Design and test of air-assisted electrostatics prayer in greenhouse. Res. Agric. Mod. 2016, 37, 1001–1007. [Google Scholar]
- Qin, W.; Chen, X.; Chen, P. “H” sprayer effect on liquid deposition on cucumber leaves and powdery mildew prevention in the shed. Front. Plant Sci. 2023, 14, 1175939. [Google Scholar] [CrossRef] [PubMed]
- Zhou, L.F.; Zhang, L.; Xue, X.Y. Research progress and application status of electrostatic pesticide spray technology. Trans. Chin. Soc. Agric. Eng. 2018, 34, 1–11. [Google Scholar]
- Boukhalfa, H.H.; Massinon, M.; Belhamra, M.; Lebeau, F. Contribution of spray droplet pinning fragmentation to canopy retention. Crop Prot. 2014, 56, 91–97. [Google Scholar] [CrossRef]
- Singh, M.; Ghanshyam, C.; Mishra, P.K.; Chak, R. Current Status of Electrostatic Spraying Technology for Efficient Crop Protection. Ama-Agric. Mech. Asia Afr. Lat. Am. 2013, 44, 46–53. [Google Scholar]
- Jensen, P.K.; Olesen, M.H. Spray mass balance in pesticide application: A review. Crop Prot. 2014, 61, 23–31. [Google Scholar] [CrossRef]
- Gong, C.W.; Liu, Y.; Ma, Y.; Zhan, X.X.; Zhou, Z.M.; Zhu, X.C.; Wang, X.G. Influence of Electrostatic Spraying on Drift and Deposition Distribution. J. Sichuan Agric. Univ. 2022, 40, 220–226+242. [Google Scholar]
- Wang, S.B.; Soong, Y.; Wang, Z.J. Research and application progress of pesticide electrostatic spraying technology in China. Jiangsu Agric. Sci. 2021, 49, 37–42. [Google Scholar]
- Bian, H.L.; Li, J.P.; Wang, P.F.; Yang, X.; Liu, H.J. Experimental research on the performance comparison between multirotor electric UAV and boom sprayer. J. Hebei Agric. Univ. 2023, 46, 96–101. [Google Scholar]
- Lu, X.Y.; Gong, Y.C.; Xiao, W.G.; Liu, D.L.; Hang, X. Design and experiment of electric crawler vertical boom sprayer. J. Chin. Agric. Mech. 2021, 42, 83–91. [Google Scholar]
- Barton, L.; Armsworth, C.; Baxter, I.; Poppy, G.; Gaunt, L.; Nansen, C. Adhesive powder uptake and transfer by Mediterranean fruit flies, (Dipt., Tephritidae). J. Appl. Entomol. 2006, 130, 257–262. [Google Scholar] [CrossRef]
- Law, S.E. Embedded-Electrode Electrostatic-Induction Spray-Charging Nozzle: Theoretical and Engineering Design. Trans. ASAE 1978, 21, 1096–1104. [Google Scholar]
- Appah, S.; Wang, P.; Ou, M.; Gong, C.; Jia, W. Review of electrostatic system parameters, charged droplets characteristics and substrate impact behavior from pesticides spraying. Int. J. Agric. Biol. Eng. 2019, 12, 1–9. [Google Scholar] [CrossRef]
- Aneesha, V.; Dhalin, D.; Kumar, K.A.; Jacob, X.K. Energy Use Efficacy of Different Sprayers on Crop Pest Management. Curr. J. Appl. Sci. Technol. 2020, 39, 76–85. [Google Scholar] [CrossRef]
- Assuncao, H.H.T.; Cunha, J.P.A.R.; Silva, S.M.; Alves, G.S.; Lemes, E.M. Spray deposition on maize using an electrostatic sprayer. Eng. Agric. 2020, 40, 503–510. [Google Scholar] [CrossRef]
- Sanchez-Hermosilla, J.; Perez-Alonso, J.; Martinez-Carricondo, P.; Carvajal-Ramirez, F.; Aguera-Vega, F. Evaluation of Electrostatic Spraying Equipment in a Greenhouse Pepper Crop. Horticulturae 2022, 8, 541. [Google Scholar] [CrossRef]
- Pathania, M.; Arora, P.K.; Sharma, U. Assessment of Electrostatic Sprayer Against Citrus Psylla Diaphorina citri Kuwayama in Kinnow Mandarin: Modern spray technology for pest management in kinnow mandarin orchards. Indian J. Ento-Mology 2023, 86, 93–97. [Google Scholar] [CrossRef]
- Xue, X.Y.; Zeng, K.; Li, N.; Luo, Q.; Ji, Y.; Li, Z.; Lyu, S.; Song, S. Parameters Optimization and Performance Evaluation Model of Air-Assisted Electrostatic Sprayer for Citrus Orchards. Agriculture 2023, 13, 1498. [Google Scholar] [CrossRef]
- Mamidi, V.R.; Ghanshyam, C.; Kumar, P.M.; Kapur, P. Electrostatic hand pressure knapsack spray system with enhanced performance for small scale farms. J. Electrost. 2013, 71, 785–790. [Google Scholar] [CrossRef]
- Patel, M.K.; Praveen, B.; Sahoo, H.K.; Patel, B.; Kumar, A.; Singh, M.; Nayak, M.K.; Rajan, P. An advance air-induced air-assisted electrostatic nozzle with enhanced performance. Comput. Electron. Agric. 2017, 135, 280–288. [Google Scholar] [CrossRef]
- Zhou, H.T.; Ou, M.X.; Dong, X.; Zhou, W.; Dai, S.Q.; Jia, W.D. Spraying performance and deposition characteristics of an improved air-assisted nozzle with induction charging. Front. Plant Sci. 2024, 15, 1309088. [Google Scholar] [CrossRef] [PubMed]
- Tavares, R.M.; Cunha, J.; Alves, T.C.; Bueno, M.R.; Silva, S.M.; Zandonadi, C.H.S. Electrostatic spraying in the chemical control of Triozoida limbata (Enderlein) (Hemiptera: Triozidae) in guava trees (Psidium guajava L.). Pest Manag. Sci. 2017, 73, 1148–1153. [Google Scholar] [CrossRef] [PubMed]
- Assunçao, H.H.T.; Silva, S.M.; Alves, G.S.; Zandonadi, C.H.S.; da Cunha, J. Electrostatic spraying effect on spray deposition and powdery mildew control in soybean. Eng. Agric. 2019, 39, 721–728. [Google Scholar] [CrossRef]
- Marques, R.S.; da Cunha, J.; Alves, G.S.; Alves, T.C.; Silva, S.M.; Zandonadi, C.H.S. Control of Dalbulus maidis in maize crop with electrostatic spraying. Biosci. J. 2019, 35, 1780–1788. [Google Scholar] [CrossRef]
- Hu, H.; Kaizu, Y.; Huang, J.; Furuhashi, K.; Zhang, H.; Xiao, X.; Li, M.; Imou, K. Design and performance test of a novel UAV air-assisted electrostatic centrifugal spraying system. Int. J. Agric. Biol. Eng. 2022, 15, 34–40. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, X.; Lan, Y.; Wang, L.; Lu, X.; Yan, K.; Deng, J.; Zeng, W. Development and Prospect of UAV-Based Aerial Electrostatic Spray Technology in China. Appl. Sci. 2021, 11, 4071. [Google Scholar] [CrossRef]
- GB/T 33006-2016; Electrostatic Sprayer—Technical Requirements. Standardization Administration of the People’s Republic of China: Beijing, China, 2016.
- DB32/T 3574-2019; Electrostatic Sprayer Technical Specification for Operational Quality Assessment. Jiangsu Provincial Department of Agriculture and Rural Affairs of China: Beijing, China, 2019.
- Jing, S.; Ren, L.; Zhang, Y.; Han, X.; Gao, A.; Liu, B.; Song, Y.; Manetto, G.E.; Cerruto, E.; Ramirez-Cuesta, J.; et al. A Simulation and Experiment on the Optimization Design of an Air Outlet Structure for an Air-Assisted Sprayer. Agriculture 2023, 13, 2277. [Google Scholar] [CrossRef]
- Luo, Y.; Huang, D.; Jiang, P.; Xiang, S.; Liu, J.; Xu, M.; Shi, Y. Design and Experimental Testing of an Overhead Rail Automatic Variable-Distance Targeted Spray System for Solar Greenhouses. Agriculture 2023, 13, 1853. [Google Scholar] [CrossRef]
- Hislop, E.C. Electrostatic ground-rig spraying: An overview. Weed Technol. 1988, 2, 94–105. [Google Scholar] [CrossRef]
- Ghafoor, A.; Khan, F.A.; Khorsandi, F.; Khan, M.A.; Nauman, H.M.; Farid, M.U. Development and Evaluation of a Prototype Self-Propelled Crop Sprayer for Agricultural Sustainability in Small Farms. Sustainability 2022, 14, 9204. [Google Scholar] [CrossRef]
- Guo, N.; Liu, S.Y.; Xu, H.; Tian, S.B.; Li, T.L. Improvement on image detection algorithm of droplets deposition characteristics. Trans. Chin. Soc. Agric. Eng. 2018, 34, 176–182. [Google Scholar]
- Kang, J.; Liu, G.; Guo, G.F. Image preprocessing and droplet parameter measurement of water-sensitive paper based on ImagePy. Sci. Technol. Eng. 2021, 21, 5405–5414. [Google Scholar]
- Sanchez-Hermosilla, J.; Rincon, V.J.; Paez, F.; Agueera, F.; Carvajal, F. Field evaluation of a self-propelled sprayer and effects of the application rate on spray deposition and losses to the ground in greenhouse tomato crops. Pest Manag. Sci. 2011, 67, 942–947. [Google Scholar] [CrossRef]
- Sanchez-Hermosilla, J.; Rincon, V.J.; Paez, F.; Fernandez, M. Comparative spray deposits by manually pulled trolley sprayer and a spray gun in greenhouse tomato crops. Crop Prot. 2012, 31, 119–124. [Google Scholar] [CrossRef]
- Zhao, S.; Castle, G.S.P.; Adamiak, K. Factors affecting deposition in electrostatic pesticide spraying. J. Electrost. 2008, 66, 594–601. [Google Scholar] [CrossRef]
- Yuan, H.Z.; Wang, G.B. Effects of droplet size and deposition density on field efficacy of pesticides. Plant Prot. 2015, 41, 9–16. [Google Scholar]
- Gao, X.; Wang, A.T.; Liu, Y.Z. Study on voltage electrostatic for spraying settlement characteristics. Agric. Mech. Study 2012, 9, 180–186. [Google Scholar]
- Han, D.; Zhang, H.; Li, G.; Wang, G.; Wang, X.; Chen, Y.; Chen, X.; Wen, X.; Yang, Q.; Zhao, R. Development of a Bionic Picking Device for High Harvest and Low Loss Rate Pod Pepper Harvesting and Related Working Parameter Optimization Details. Agriculture 2024, 14, 859. [Google Scholar] [CrossRef]
- Salcedo, R.; Llop, J.; Campos, J.; Costas, M.; Gallart, M.; Ortega, P.; Gil, E. Evaluation of Leaf Deposit Quality between Electrostatic and Conventional Multi-Row Sprayers in a Trellised Vineyard. Crop Prot. 2020, 127, 104964. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | L (cm) | P (MPa) | D (kV) |
|---|---|---|---|
| Level | 25~100 | 0.4~1.0 | 2~14 |
| Level | D/kV | P/MPa | L/cm |
|---|---|---|---|
| −1 | 6 | 0.4 | 25 |
| 0 | 10 | 0.6 | 50 |
| 1 | 14 | 0.8 | 75 |
| Item | D/kV | P/MPa | L/cm | Z/% | F/% |
|---|---|---|---|---|---|
| 1 | 6 | 0.4 | 50 | 72.54 | 19.83 |
| 2 | 6 | 0.8 | 50 | 56.58 | 20.07 |
| 3 | 10 | 0.4 | 25 | 85.36 | 21.82 |
| 4 | 14 | 0.8 | 50 | 63.95 | 50.46 |
| 5 | 10 | 0.6 | 50 | 79.45 | 31.66 |
| 6 | 14 | 0.4 | 50 | 75.45 | 28.85 |
| 7 | 10 | 0.6 | 50 | 85.74 | 35.56 |
| 8 | 14 | 0.6 | 25 | 89.56 | 45.24 |
| 9 | 10 | 0.4 | 75 | 43.85 | 7.16 |
| 10 | 10 | 0.6 | 50 | 80.09 | 30.11 |
| 11 | 14 | 0.6 | 75 | 41.45 | 10.28 |
| 12 | 6 | 0.6 | 25 | 73.49 | 4.79 |
| 13 | 10 | 0.6 | 50 | 84.24 | 32.65 |
| 14 | 10 | 0.6 | 50 | 83.14 | 30.17 |
| 15 | 10 | 0.8 | 25 | 82.48 | 40.62 |
| 16 | 6 | 0.6 | 75 | 45.31 | 5.42 |
| 17 | 10 | 0.8 | 75 | 44.92 | 7.42 |
| (a) The regression model of leaf frontal coverage | |||||
| Source | Sum of Squares | Degree Freedom | Mean Square | F-Value | p-Value |
| Model | 4478.08 | 9 | 497.56 | 30.90 | <0.0001 |
| D | 63.23 | 1 | 63.23 | 3.93 | 0.0880 |
| P | 107.09 | 1 | 107.09 | 6.65 | 0.0365 |
| L | 3017.09 | 1 | 3017.09 | 187.38 | <0.0001 |
| DP | 4.97 | 1 | 4.97 | 0.3088 | 0.5957 |
| DL | 99.30 | 1 | 99.30 | 6.17 | 0.0420 |
| PL | 3.90 | 1 | 3.90 | 0.2422 | 0.6376 |
| D2 | 307.87 | 1 | 307.87 | 19.12 | 0.0033 |
| P2 | 197.63 | 1 | 197.63 | 12.27 | 0.0099 |
| L2 | 559.61 | 1 | 559.61 | 34.75 | 0.0006 |
| Residual | 112.71 | 7 | 16.10 | ||
| Lack-of-Fit | 83.67 | 3 | 27.89 | 3.84 | 0.1132 |
| Error | 29.04 | 4 | 7.26 | ||
| Total | 4590.79 | 16 | |||
| (b) The regression model of leaf back coverage | |||||
| Source | Sum of Squares | Degree Freedom | Mean Square | F-Value | p-Value |
| Model | 3232.05 | 9 | 359.12 | 52.01 | <0.0001 |
| D | 897.18 | 1 | 897.18 | 129.93 | <0.0001 |
| Pr | 209.20 | 1 | 209.20 | 30.30 | 0.0009 |
| L | 844.40 | 1 | 844.40 | 122.29 | <0.0001 |
| DPr | 114.17 | 1 | 114.17 | 16.53 | 0.0048 |
| DL | 316.66 | 1 | 316.66 | 45.86 | 0.0003 |
| PrL | 85.93 | 1 | 85.93 | 12.45 | 0.0096 |
| D2 | 26.84 | 1 | 26.84 | 3.89 | 0.0893 |
| Pr2 | 0.3727 | 1 | 0.3727 | 0.0540 | 0.8229 |
| L2 | 719.54 | 1 | 719.54 | 104.21 | <0.0001 |
| Residual | 48.34 | 7 | 6.91 | ||
| Lack-of-Fit | 28.21 | 3 | 9.40 | 1.87 | 0.2757 |
| Error | 20.13 | 4 | 5.03 | ||
| Total | 3280.38 | 16 | |||
| Serial Number | Front Coverage of Blades (%) | Back Coverage of Blades (%) |
|---|---|---|
| 1 | 84.11 | 33.88 |
| 2 | 87.38 | 35.12 |
| 3 | 79.08 | 39.71 |
| Average | 83.52 | 36.24 |
| Relative error | 2.63 | 1.31 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Zhang, J.; Chen, L.; Wang, Z.; Wang, H.; Wang, X. Study on Deposition Characteristics of the Electrostatic Sprayer for Pesticide Application in Greenhouse Tomato Crops. Agriculture 2024, 14, 1981. https://doi.org/10.3390/agriculture14111981
Guo Z, Zhang J, Chen L, Wang Z, Wang H, Wang X. Study on Deposition Characteristics of the Electrostatic Sprayer for Pesticide Application in Greenhouse Tomato Crops. Agriculture. 2024; 14(11):1981. https://doi.org/10.3390/agriculture14111981
Chicago/Turabian StyleGuo, Zhanhong, Jiajia Zhang, Lining Chen, Zhaoyang Wang, Hongbiao Wang, and Xufeng Wang. 2024. "Study on Deposition Characteristics of the Electrostatic Sprayer for Pesticide Application in Greenhouse Tomato Crops" Agriculture 14, no. 11: 1981. https://doi.org/10.3390/agriculture14111981
APA StyleGuo, Z., Zhang, J., Chen, L., Wang, Z., Wang, H., & Wang, X. (2024). Study on Deposition Characteristics of the Electrostatic Sprayer for Pesticide Application in Greenhouse Tomato Crops. Agriculture, 14(11), 1981. https://doi.org/10.3390/agriculture14111981