
A Review of Contact Models’ Properties for Discrete Element Simulation in Agricultural Engineering
Abstract
:1. Introduction
- (1)
- Mining engineering: In mining engineering, discrete element simulation is used to study the fracture and destabilization behavior of rocks and minerals and the mining and excavation process of mines. Discrete element simulation predicts mines’ stability and optimizes mining schemes.
- (2)
- Civil engineering: In civil engineering, discrete element simulation is used to structure dynamic behavior and seismic responses. Through discrete element simulation, the stability and safety of structures can be assessed, structural design can be optimized, and the seismic performance of buildings can be improved.
- (3)
- Mechanical engineering: In mechanical engineering, discrete element simulation is used to simulate the flow and separation of particulate matter and mechanical systems’ dynamic behavior and collisions. Through discrete element simulation, the efficiency and reliability of mechanical systems can be improved, and the design and performance of mechanical products can be optimized.
- (4)
- Environmental engineering: In environmental engineering, discrete element simulation is used to simulate the transport and deposition of particulate matter in rivers, lakes, and oceans, as well as the evolution and impact of environmental disasters. Through discrete element simulation, environmental changes and disaster development trends can be predicted, providing a scientific basis for environmental protection and disaster prevention and control.
- (5)
- Agricultural engineering: In agricultural engineering, the operating objects of agricultural implements are usually more discrete and accompanied by a flow or collision rupture after movement, such as the application of seeds and fertilizers and the movement and collision of the soil in touching operation. In such cases, the finite element method can only consider the discrete group as a whole. It is impossible to analyze the movement of the individual particles and the force, so the accuracy and versatility of analytical calculations using the discrete element method are much higher [4,11].
2. Overview of Discrete Element Simulation Models Commonly Used in Agricultural Engineering
2.1. Linear Model
2.2. Hertz–Mindlin (No-Slip) Model
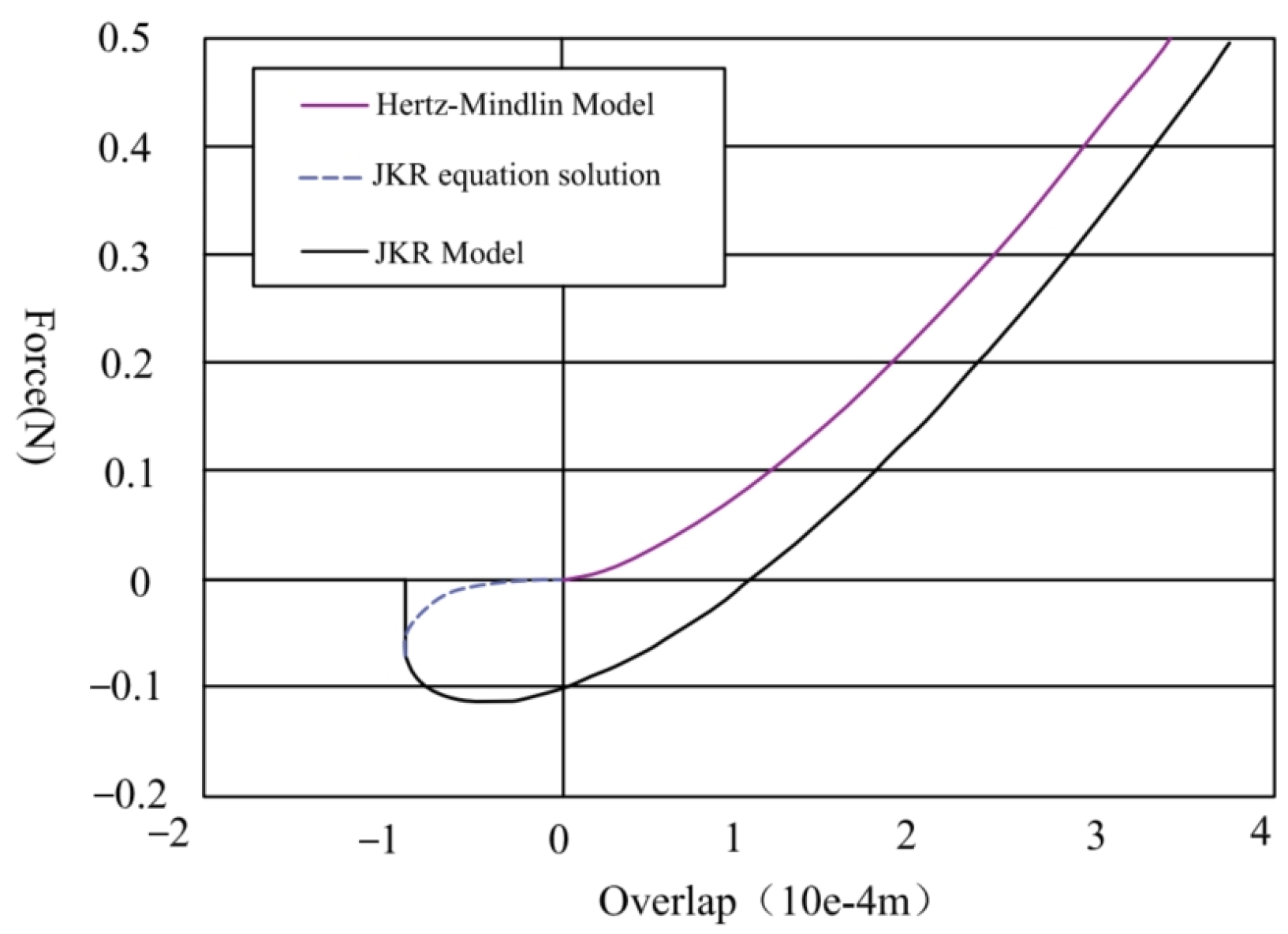
2.3. Hertz–Mindlin with JKR
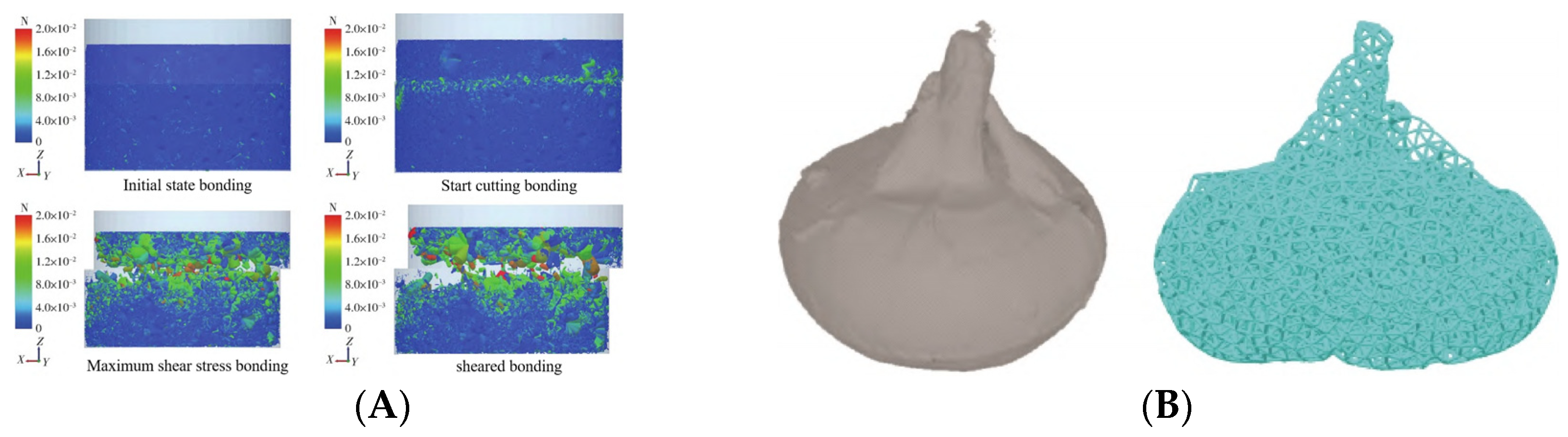
2.4. Hertz–Mindlin with Bonding Model
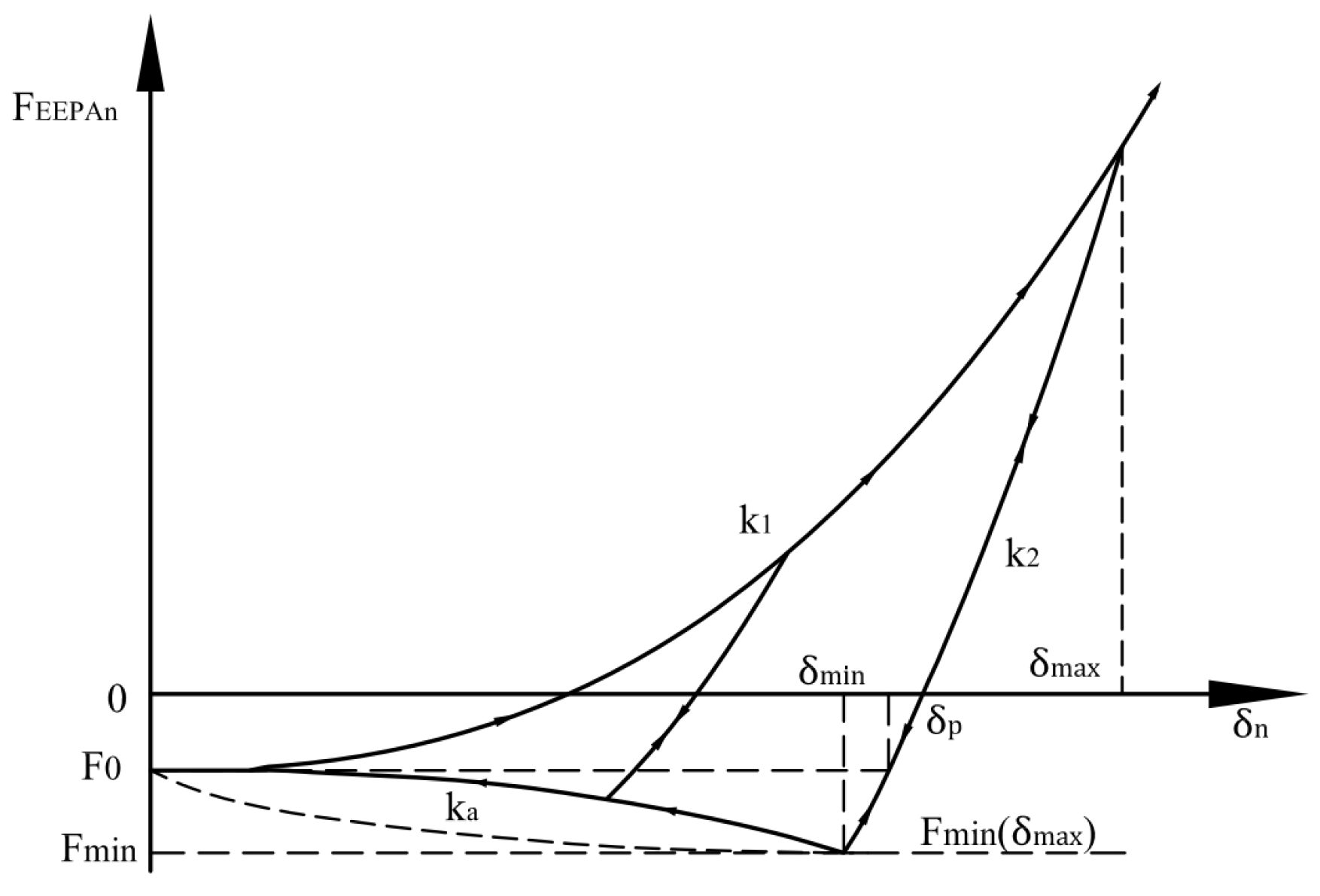
2.5. EEPA Model
3. Overview of Other Discrete Meta-Simulation Models in the Field of Agricultural Engineering
3.1. Rolling Resistance Linear Model
3.2. Adhesive Rolling Resistance Linear Model
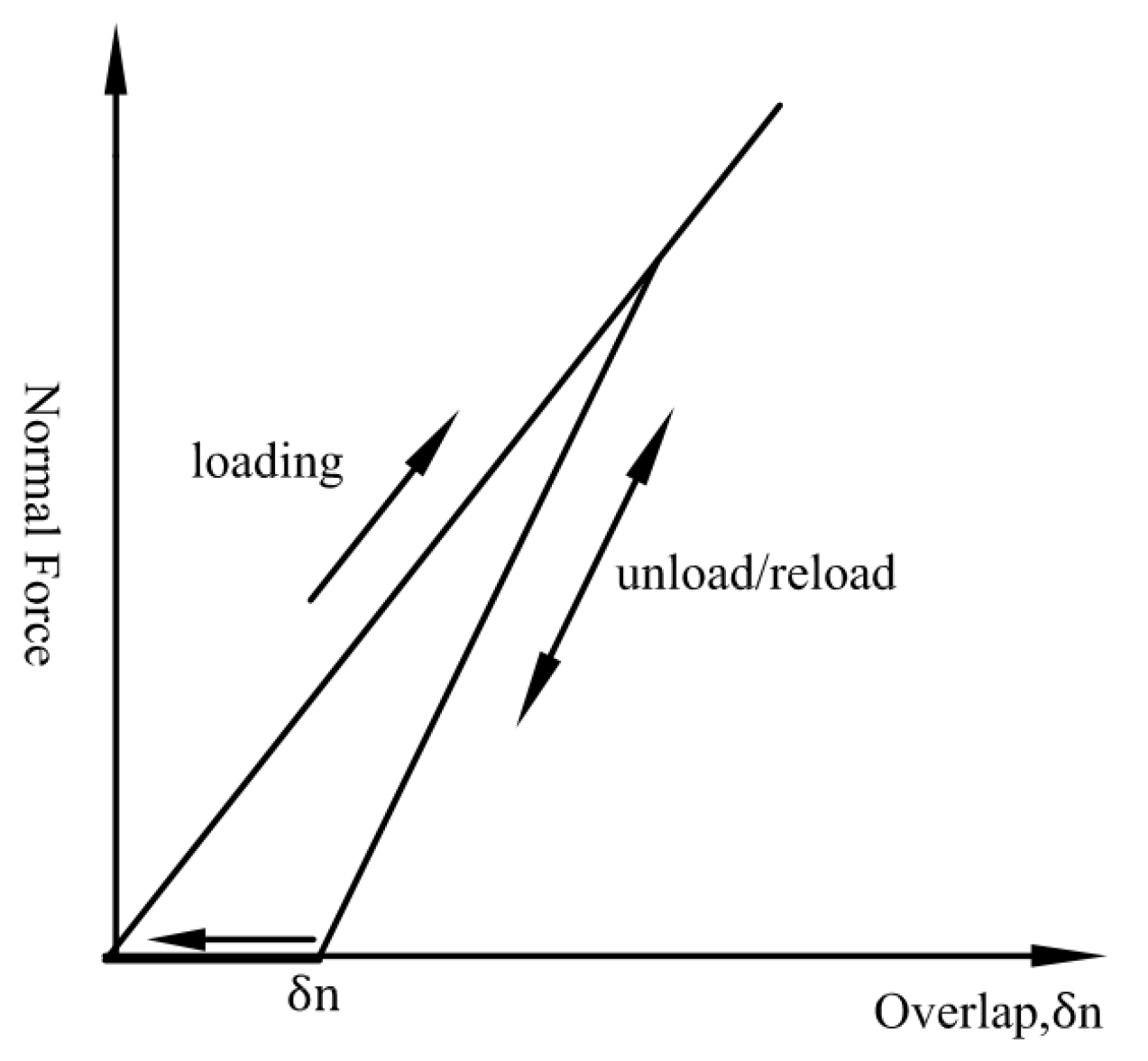
3.3. Hysteretic Model
3.4. Other Models
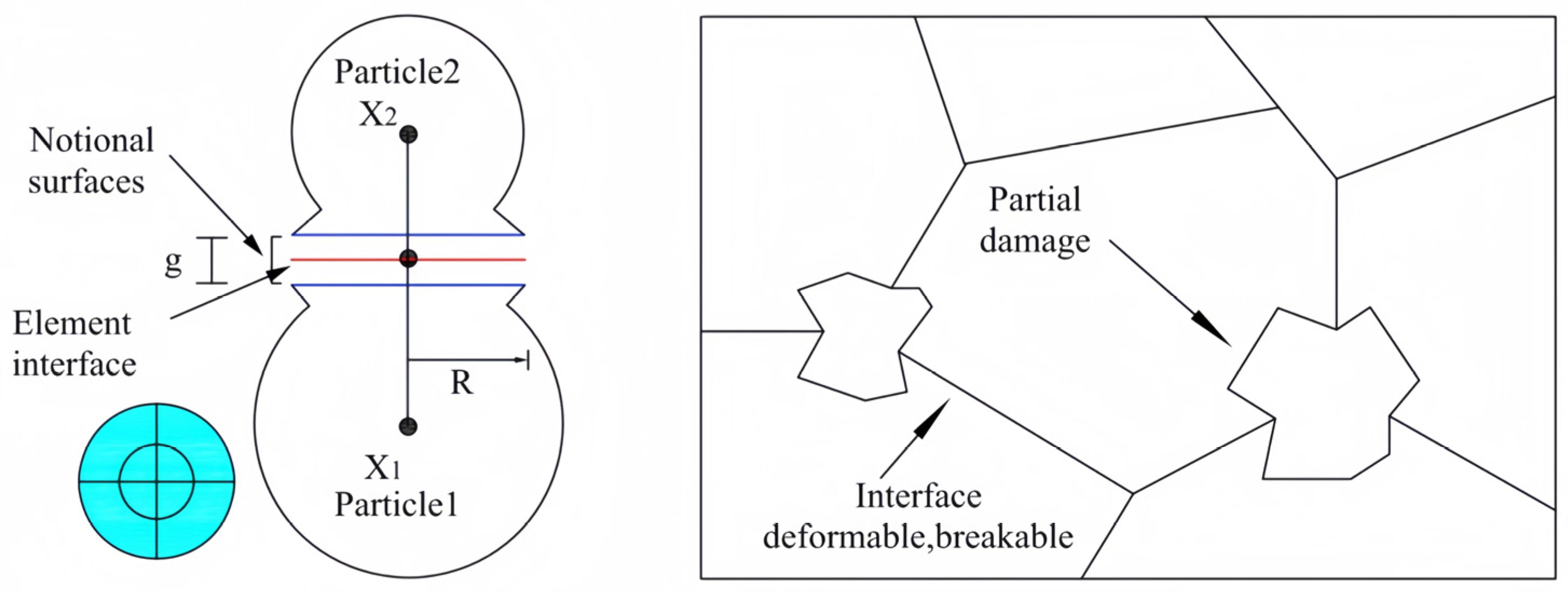
3.4.1. Flat-Joint Model
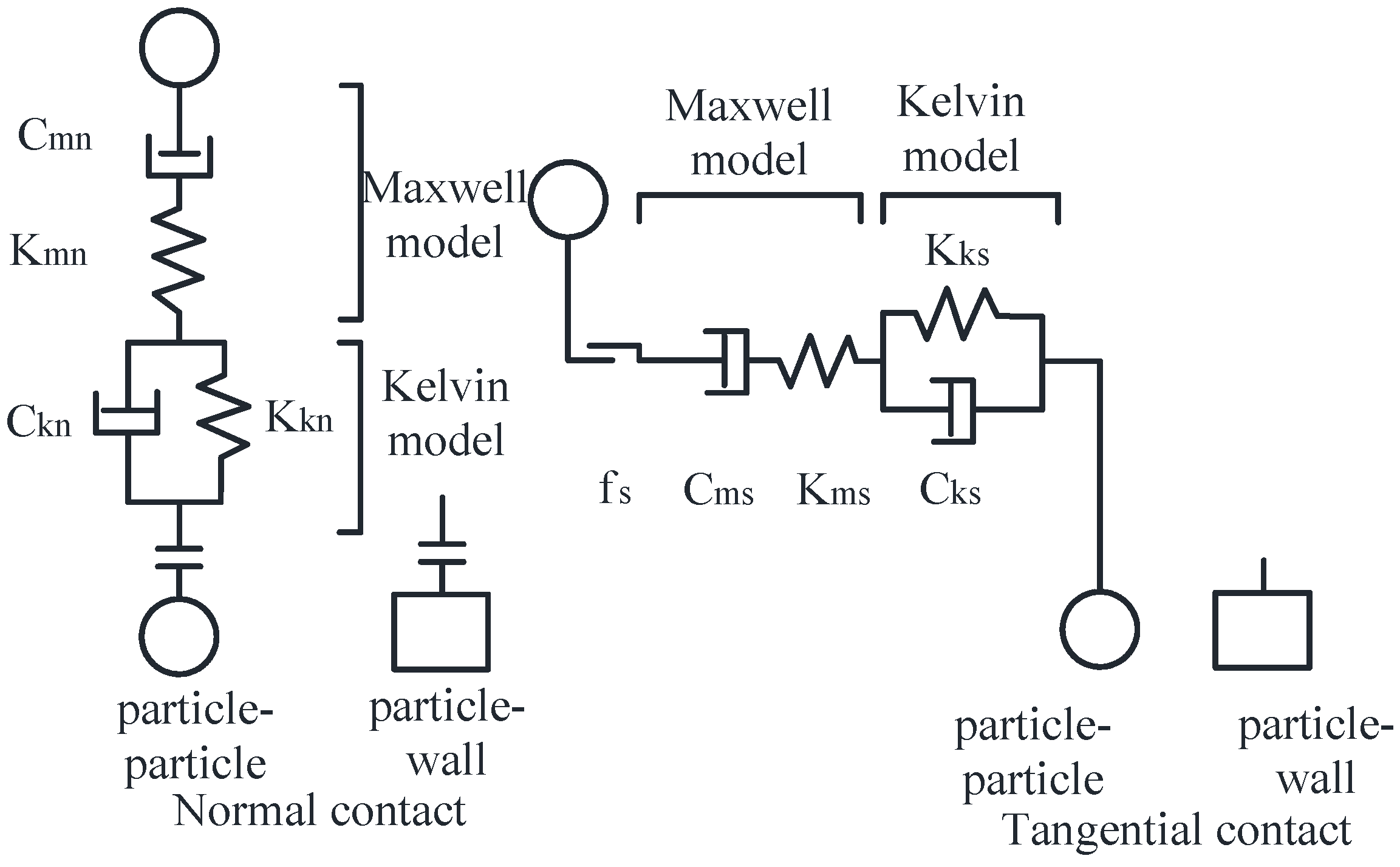
3.4.2. Burgers Model
4. Trends in the Application of Contact Modeling for Discrete Element Simulation
- (1)
- From the analysis of the simulation model application, it can be seen that it is difficult to use a single model to simulate the operating objects in the field of agricultural engineering to thoroughly express all the characteristics of the material, and in the simulation and analysis of the mixture of materials in the process of the contact, the characteristics of the different substances are also different. Therefore, in the future, simulation should be used in combination with the multiple contact model of the discrete unit of the force and displacement for more accurate analysis and calculation. Therefore, the forces and displacements of discrete units should be analyzed and calculated more accurately in the future by mixing multiple contact models.
- (2)
- Many of the contact models used in agricultural engineering are based on the stress–strain calculation method and analyzed using geotechnical theory, and the contact characteristics in the simulation and analysis of crops differ significantly from the actual situation. Therefore, in the future, we need to design a particular contact model for the simulation object in the field of agriculture. By fitting the contact-fracture characteristics of the object through the setting of critical parameters such as spring, damping, slider, contact surface, and bonding key, the degree of similarity of the simulated object is fitted by the model and then assisted by the calibration process. According to the simulation parameters and application scenarios to be obtained on the simulation object, it needs to be determined whether it is a rigid body, whether it is plastic deformation, whether it is fracture damage, etc., for the establishment of a particular model so that the contact model of the force to match the deformation of the computational analysis of the actual situation as much as possible, to ensure the accuracy of the simulation model.
- (3)
- After determining the contact model, it is also necessary to determine and correct its physical or contact parameters through parameter calibration to ensure the accuracy of the model, and often, the error brought about by the measurement results at this time will also make the model show a big difference from the actual situation. Therefore, in the future, we should carry out a standardized process of physical and contact parameter determination for different contact models, find out the best determination method from the existing contact-parameter-determination method to unify the measurement specifications, and improve the accuracy of the discrete element method in the application of contact simulation in the field of agricultural engineering.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, X. Research on computer simulation technology and its application in agricultural engineering. China Rice 2021, 27, 150. [Google Scholar]
- Chen, S.; Mao, H.; Jia, W. Computer Simulation Technology and Its Application in Agricultural Engineering; Jiangsu University Press: Zhenjiang, China, 2011. [Google Scholar]
- Ma, Z.; Li, Y.; Xu, L. A review of discrete unit motion research in agricultural engineering. J. Agric. Mach. 2013, 44, 22–29. [Google Scholar]
- Yu, J.; Fu, H.; Li, H.; Shen, Y. Discrete element method and its application in the research and design of working parts of agricultural machinery. J. Agric. Eng. 2005, 21, 6. [Google Scholar]
- Zeng, Z.W.; Ma, X.; Cao, X.L.; Li, Z.H.; Wang, X.C. Current status and outlook of the application of discrete element method in agricultural engineering research. J. Agric. Mach. 2021, 52, 1–20. [Google Scholar]
- Clough, R.W. The finite element in plane stress analysis. Proc. Am. Soc. Civ. Eng. 1960, 23, 337–345. [Google Scholar]
- Cundall, P.A. A computer model for simulating progressive, large-scale movements in rocksy block systems. In Proceedings of the International Symposium on Rock Mechanics, Nancy, France, 4–6 October 1971. [Google Scholar]
- Cundall, P.A.; Strack, O. A discrete numerical model for granual assemblies. Geotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Li, L. Research status and prospect of discrete element method in agricultural engineering. Chin. J. Agric. Mech. Chem. 2015, 36, 345–348. [Google Scholar]
- Wang, W.; Li, X. A review of discrete element method and its application in geotechnical engineering. Geotech. Eng. Technol. 2005, 19, 177–181. [Google Scholar]
- Yu, J.; Fu, H. Digital design software based on discrete element method and its application in the research and design of working parts of agricultural machinery. In Proceedings of the Abstracts of the Chinese Mechanics Society Academic Conference 2009, Zhengzhou, China, 24–26 August 2009; p. 435. [Google Scholar]
- He, Y.; Wu, M.; Xiang, W.; Yan, B.; Wang, J.; Bao, P. Progress in the application of discrete element method in agricultural engineering. China Agron. Bull. 2017, 33, 133–137. [Google Scholar]
- Hansong, J.I.; Song, Q.; Gupta, M.K.; Cai, W.; Zhao, Y.; Liu, Z. Grain scale modelling and parameter calibration methods in crystal plasticity finite element researches: A short review. J. Adv. Manuf. Sci. Technol. 2021, 1, 2021005. [Google Scholar]
- Fang, W.; Wang, X.; Han, D.; Chen, X. Review of material parameter calibration method. Agriculture 2022, 12, 706. [Google Scholar] [CrossRef]
- Coetzee, C.J. Calibration of the discrete element method. Powder Technol. 2017, 310, 104–142. [Google Scholar] [CrossRef]
- Coetzee, C.J.; Scheffler, O.C. The Calibration of DEM Parameters for the Bulk Modelling of Cohesive Materials. Processes 2022, 11, 5. [Google Scholar] [CrossRef]
- Itasca. PFC3D User Manual; Itasca Consulting Group Inc.: Minneapolis, MN, USA, 2003. [Google Scholar]
- Hertz, H. Uber die beruhrung fester elastischer korper (On the contact of elastic solids). J. Reine Angew. Math. 1882, 91, 156–171. [Google Scholar] [CrossRef]
- Mindlin, R.D.; Deresiewicz, H. Elastic Spheres in Contact Under Varying Oblique Forces. J. Appl. Mech. 1953, 20, 327–344. [Google Scholar] [CrossRef]
- Tsuji, Y.; Tanaka, T.; Ishida, T. Lagrangian numerical simulation of plug flow of cohesionless particles in a horizontal pipe. Powder Technol. 1992, 71, 239–250. [Google Scholar] [CrossRef]
- Elata, D.; Berryman, J.G. Contact force-displacement laws and the mechanical behavior of random packs of identical spheres. Mech. Mater. 1996, 24, 229–240. [Google Scholar] [CrossRef]
- Ramírez, R.; Pöschel, T.; Brilliantov, N.V.; Schwager, T. Coefficient of restitution of colliding viscoelastic spheres. Phys. Review. E Stat. Phys. Plasmas Fluids Relat. Interdiscip. Top. 1999, 60, 4465–4472. [Google Scholar] [CrossRef] [PubMed]
- Song, S.; Tang, Z.; Zheng, X.; Liu, J.; Meng, X.; Liang, Y. Calibration of discrete elemental parameters of a post-tillage soil model for cotton fields in Xinjiang. J. Agric. Eng. 2021, 37, 63–70. [Google Scholar]
- Dai, F.; Song, X.; Zhao, W.; Zhang, F.; Navy, M.A.; Mingyi, M.A. Simulated calibration of discrete elemental contact parameters for full-film dihedral furrow mulching soil. J. Agric. Mach. 2019, 50, 49–56+77. [Google Scholar]
- Zhang, R.; Han, T.L.; Ji, Q.L.; He, Y.; Li, J.Q. Research on the calibration method of sand and soil parameters in discrete element simulation. J. Agric. Mach. 2017, 48, 49–56. [Google Scholar]
- Yan, D.X. Simulation Analysis and Experimental Research on Discrete Unit Modeling of Soybean Seed and the Process of Seed Casting, Mulching and Suppression. Ph.D. Thesis, Jilin University, Changchun, China, 2021. [Google Scholar]
- Yan, D.; Yu, J.; Liang, L.; Wang, Y.; Liang, P. A Comparative Study on the Modelling of Soybean Particles Based on the Discrete Element Method. Processes 2021, 9, 286. [Google Scholar] [CrossRef]
- Yan, L. A general modelling method for soybean seeds based on the discrete element method. Powder Technol. Int. J. Sci. Technol. Wet Dry Part. Syst. 2020, 372, 212–226. [Google Scholar] [CrossRef]
- Song, X.-F.; Dai, F.; Shi, R.-J.; Wang, F.; Zhang, F.W.; Zhao, W.Y. Simulation and test of vibratory sorting of jute threshing material based on non-spherical discrete unit model. J. Agric. Eng. 2022, 38, 8. [Google Scholar]
- Shu, C.; Yang, J.; Wan, X.; Yuan, J.C.; Liao, Y.T.; Liao, Q.X. Calibration and test of discrete element simulation parameters for combined harvesting of oilseed rape rejects. J. Agric. Eng. 2022, 38, 34–43. [Google Scholar]
- Adajar, J.B.; Alfaro, M.; Chen, Y.; Zeng, Z. Calibration of discrete element parameters of crop residues and their interfaces with soil. Comput. Electron. Agric. 2021, 188, 106349. [Google Scholar] [CrossRef]
- Liang, R.; Chen, X.; Zhang, B.; Wang, X.; Kan, Z.; Meng, H. Calibration and test of the contact parameters for chopped cotton stems based on discrete element method. Int. J. Agric. Biol. Eng. 2022, 15, 9. [Google Scholar] [CrossRef]
- Liao, Y.; Wang, Z.; Liao, Q.; Wan, X.; Zhou, Y.; Liang, F. Parameter calibration of discrete elemental contact model for fodder rape stalks at early fruit pod stage. J. Agric. Mach. 2020, 51, 8. [Google Scholar]
- Yu, Q.; Liu, Y.; Chen, X.; Sun, K.; Lai, Q.H. Calibration and test of simulation parameters of panax pseudoginseng seeds based on discrete elements. J. Agric. Mach. 2020, 51, 10. [Google Scholar]
- Zhou, D. A study on the modelling method of maize-seed particles based on the discrete element method. Powder Technol. Int. J. Sci. Technol. Wet Dry Part. Syst. 2020, 374, 353–376. [Google Scholar] [CrossRef]
- Wu, Q.; Liu, B.; Wang, Z.; Cai, Y. Numerical simulation and experimental study on stacking angle of lignite discrete units. Fertil. Des. 2021, 59, 5–8. [Google Scholar]
- Wang, L.; He, X.; Hu, C.; Guo, W.S.; Wang, X.F.; Xing, J.F.; Hou, S.L. Determination of physical properties of coated cotton seeds and calibration of discrete element simulation parameters. J. China Agric. Univ. 2022, 27, 12. [Google Scholar]
- Liu, F.Y.; Zhang, J.; Li, B. Discrete element parameter analysis and calibration of wheat based on stacking test. J. Agric. Eng. 2016, 32, 7. [Google Scholar]
- Liu, C.; Wang, Y.; Song, J.; Li, Y.; Ma, T. Discrete elemental modeling and test of rice seeds based on three-dimensional laser scanning. J. Agric. Eng. 2016, 32, 7. [Google Scholar]
- Aori, G.L.; Zhang, W.; Wang, S.; Liu, W.H.; Yu, Z.H. Determination of physical contact parameters of sunflower seeds with discrete element simulation calibration. Agric. Mech. Res. 2023, 45, 9. [Google Scholar]
- Johnson, K.L.; Kendall, K.; Roberts, A.D. Surface Energy and the Contact of Elastic Solids. Proc. R. Soc. A Math. Phys. Eng. Sci. 1971, 324, 301–313. [Google Scholar]
- Baran, O.; DeGennaro, A.; Rame, E.; Wilkinson, A. DEM Simulation of a Schulze Ring Shear Tester. In Proceedings of the 6th International Conference on Micromechanics of Granular Media, Golden, CO, USA, 13–17 July 2009; pp. 409–412. [Google Scholar]
- Gilabert, F.A.; Roux, J.-N.; Castellanos, A. Computer simulation of model cohesive powders: Influence of assembling procedure and contact laws on low consolidation states. Phys. Rev. E 2007, 75, 011303. [Google Scholar] [CrossRef]
- Antony, S.J.; Moreno-Atanasio, R.; Musadaidzwa, J.; Williams, R.A. Impact Fracture of Composite and Homogeneous Nanoagglomerates. J. Nanomater. 2008, 2008, 125386. [Google Scholar] [CrossRef]
- Carrillo, J.M.Y.; Raphael, E.; Dobrynin, A.V. Adhesion of nanoparticles. Langmuir ACS J. Surf. Colloids 2010, 26, 12973–12979. [Google Scholar] [CrossRef] [PubMed]
- Hassanpour, A.; Antony, S.J.; Ghadiri, M. Influence of interface energy of primary particles on the deformation and breakage behaviour of agglomerates sheared in a powder bed. Chem. Eng. Sci. 2008, 63, 5593–5599. [Google Scholar] [CrossRef]
- Modenese, C.; Utili, S.; Houlsby, G.T. A Study of the Influence of Surface Energy on the Mechanical Properties of Lunar Soil Using DEM. In Discrete Element Modelling of Particulate Media; Wu, C.Y., Ed.; Chapter 9; RSC Publishing: Washington, DC, USA, 2012; pp. 69–75. ISBN 9781849735032. [Google Scholar]
- Moreno-Atanasio, R.; Antony, S.J.; Ghadiri, M. Analysis of flowability of cohesive powders using Distinct Element Method. Powder Technol. 2005, 158, 51–57. [Google Scholar] [CrossRef]
- Wu, T.; Huang, W.; Chen, X.; Ma, X.; Han, Z.Q.; Pan, T. Parameter calibration of a discrete element model for cohesive soil considering the bonding force between discrete units. J. South China Agric. Univ. 2017, 38, 93–98. [Google Scholar]
- Xian, W.; Wu, M.; Lu, J.; Quan, W.; Ma, L.; Liu, J.J. Calibration of simulated physical parameters of clay loam soil based on stacking test. J. Agric. Eng. 2019, 35, 116–123. [Google Scholar]
- Wang, L.; Fan, S.; Cheng, H.; Meng, H.B.; Shen, Y.J.; Wang, J.; Zhou, H.B. Calibration of contact parameters of swine manure based on EDEM. J. Agric. Eng. 2020, 36, 95–102. [Google Scholar]
- Luo, S.; Yuan, Q.; Shaban, G.; Yang, L.Y. Parameter calibration of earthworm manure substrate discrete element method based on JKR bonding model. J. Agric. Mach. 2018, 49, 343–350. [Google Scholar]
- Wang, W.; Cai, D.; Xie, J.; Zhang, C.; Liu, L.; Chen, L. Parameter calibration of discrete element model for dense molding of corn stover powder. J. Agric. Mach. 2021, 52, 127–134. [Google Scholar]
- Huo, L.; Zhao, L.; Tian, Y.; Yao, Z.L.; Meng, H.B. Viscoelastic intrinsic model for biomass discrete unit fuel molding. J. Agric. Eng. 2013, 29, 200–206. [Google Scholar]
- Dop, A.; Pac, B. A bonded-particle model for rock. Int. J. Rock Mech. Min. Sci. 2004, 41, 1329–1364. [Google Scholar]
- Potyondy, D.O. The bonded-particle model as a tool for rock mechanics research and application: Current trends and future directions. Geosystem Eng. 2015, 18, 1–28. [Google Scholar] [CrossRef]
- Obermayr, M.; Dressler, K.; Vrettos, C.; Eberhard, P. A bonded-particle model for cemented sand. Comput. Geotech. 2013, 49, 299–313. [Google Scholar] [CrossRef]
- Song, Z.; Konietzky, H.; Herbst, M. Bonded-particle model-based simulation of artificial rock subjected to cyclic loading. Acta Geotech. 2019, 14, 955–971. [Google Scholar] [CrossRef]
- Potyondy, D.O. Simulating stress corrosion with a bonded-particle model for rock. Int. J. Rock Mech. Min. Sci. 2007, 44, 677–691. [Google Scholar] [CrossRef]
- Yoon, J.S.; Jeon, S.; Zang, A.; Stephansson, O. Bonded particle model simulation of laboratory rock tests for granite using particle clumping and contact unbonding. In Proceedings of the 2nd International FLAC/DEM Symposium, Melbourne, VIC, Australia, 14–16 February 2011. [Google Scholar]
- Song, Z.; Li, H.; Yan, Y.; Tian, F.Y.; Li, Y.D.; Li, F.D. Parameter calibration and test of discrete element simulation model for non-equal-size discrete unit of mulberry soil. J. Agric. Mach. 2022, 53, 21–33. [Google Scholar]
- Hu, J.; Zhao, J.; Pan, H.; Liu, W.; Zhao, X. A discrete element-based power consumption prediction model for a two-axis rotary tiller. J. Agric. Mach. 2020, 51 (Suppl. S1), 16–23. [Google Scholar]
- Zhu, H.; Wu, X.; Bai, L.; Qian, C.; Zhao, H.; Li, H. Development of a dual-axis stubble breaking no-tillage device for rice stubble land based on EDEM-ADAMS simulation. J. Agric. Eng. 2022, 38, 10–22. [Google Scholar]
- Zhang, Z.; Zhao, L.; Lai, Q.; Tong, J. Analysis and test of operating mechanism of shovel-plate type rolling soil touching component based on DEM-MBD coupling. J. Agric. Eng. 2022, 38, 10–20. [Google Scholar]
- Liao, Y.; Liao, Q.; Zhou, Y.; Wang, Z.T.; Jiang, Y.J.; Liang, F. Parameter calibration for discrete element simulation of stalk crushing for fodder rape harvesting at shoot stage. J. Agric. Mach. 2020, 51, 10. [Google Scholar]
- Chai, X.; Zhou, Y.; Xu, L.Z.; Li, Y.; Li, Y.; Lv, L. Effect of guide strips on the distribution of threshed outputs and cleaning losses for a tangential-longitudinal flow rice combine harvester. Biosyst. Eng. 2020, 198, 228–230. [Google Scholar] [CrossRef]
- Zhang, G.; Chen, L.; Liu, H.; Dong, Z.; Zhang, Q.; Liu, Y. Calibration and test of discrete element simulation parameters of water chestnut. J. Agric. Eng. 2022, 38, 10. [Google Scholar]
- Shi, R.; Dai, F.; Zhao, W.; Zhang, F.; Shi, L.; Guo, J. Establishment of discrete element flexibility model and experimental validation of contact parameters of caraway stalk. J. Agric. Mach. 2022, 53, 146–155. [Google Scholar]
- Morrissey, J.P. Discrete Element Modelling of Iron Ore Pellets to Include the Effects of Moisture and Fines. Ph.D. Thesis, University of Edinburgh, Edinburgh, Scotland, 2013. [Google Scholar]
- Wang, X.L.; Hu, H.; Wang, Q.J.; Li, H.W.; He, J.; Chen, W.C. Calibration method of soil model parameters based on discrete elements. J. Agric. Mach. 2017, 48, 78–85. [Google Scholar]
- Wang, X. Research on Soil Compaction Evaluation and Combined Shovel Loosening Technology for Agricultural Machinery Operation. Ph.D. Thesis, China Agricultural University, Beijing, China, 2018. [Google Scholar]
- Wang, X.; Zhong, X.; Geng, Y.; Wei, Z.C.; Hu, J.; Geng, D.Y.; Zhang, X.C. Calibration of no-till soil parameters based on discrete element nonlinear elastic-plastic contact model. J. Agric. Eng. 2021, 37, 100–107. [Google Scholar]
- Li, P.; Li, Y.; Su, C.; Zhao, H.; Dong, Q.; Song, J.; Wang, S. Simulation of soil tillage characteristics based on EEPA contact model and analysis of spherical influence of discrete units. J. China Agric. Univ. 2021, 26, 193–206. [Google Scholar]
- Li, P.; Li, Y.; Zhao, H.; Xu, G.; Song, J.; Dong, Q.; Zhang, C.; Wang, S. Asymptotic throwing characteristics of single-pendulum shovel-grid harvesting device for root crops. J. Agric. Eng. 2021, 37, 9–21. [Google Scholar]
- Li, P.; Li, Y.; Jin, J.; Song, J.; Dong, Q.; Wang, S. Characterization of driving torque of single pendulum shovel fence harvesting device for root and tuber crops. J. Agric. Mach. 2022, 53, 191–200+339. [Google Scholar]
- Dong, Q.; Su, C.; Zheng, H.; Han, R.; Li, Y.; Wan, L.P.; Song, J.; Wang, S. Analysis of soil disturbance process of vibratory deep loosening based on DEM-MBD coupling algorithm. J. Agric. Eng. 2022, 38, 34–43. [Google Scholar]
- Kim, Y.S.; Siddique, M.A.A.; Kim, W.S.; Kim, Y.J.; Lee, S.D.; Lee, D.K.; Lim, R.G. DEM simulation for draft force prediction of moldboard plow according to the tillage depth in cohesive soil. Comput. Electron. Agric. 2021, 189, 106368. [Google Scholar] [CrossRef]
- Thakur, S.C.; Morrissey, J.P.; Sun, J.; Chen, J.F.; Ooi, J.Y. Micromechanical analysis of cohesive granular materials using the discrete element method with an adhesive elasto-plastic contact model. Granul. Matter 2014, 16, 383–400. [Google Scholar] [CrossRef]
- Nan, W.; Wei, P.G.; Rahman, M.T. Elasto-plastic and adhesive contact: An improved linear model and its application. Powder Technol. Int. J. Sci. Technol. Wet Dry Part. Syst. 2022, 407, 117634. [Google Scholar] [CrossRef]
- Xie, F.; Wu, Z.; Wang, X.; Liu, D.; Wu, B.; Zhang, Z. Calibration of soil discrete element parameters based on unconfined compressive strength test. J. Agric. Eng. 2020, 36, 39–47. [Google Scholar]
- Mohajeri, M.J.; Do, H.Q.; Schott, D.L. DEM calibration of cohesive material in the ring shear test by applying a genetic algorithm framework. Adv. Powder Technol. 2020, 31, 1838–1850. [Google Scholar] [CrossRef]
- Janda, A.; Ooi, J.Y. DEM modeling of cone penetration and unconfined compression in cohesive solids. Powder Technol. 2016, 293, 60–68. [Google Scholar] [CrossRef]
- Ai, J.; Chen, J.F.; Rotter, J.M.; Ooi, J.Y. Assessment of Rolling Resistance Models in Discrete Element Simulations. Powder Technol. 2011, 206, 269–282. [Google Scholar] [CrossRef]
- Wensrich, C.M.; Katterfeld, A. Rolling Friction as a Technique for Modelling Particle Shape in DEM. Powder Technol. 2012, 217, 409–417. [Google Scholar] [CrossRef]
- Jiang, M.; Shen, Z.; Wang, J. A Novel Three-Dimensional Contact Model for Granulates Incorporating Rolling and Twisting Resistances. Comput. Geotech. 2015, 65, 147–163. [Google Scholar] [CrossRef]
- Gilabert, F.A.; Roux, J.-N.; Castellanos, A. Computer Simulation of Model Cohesive Powders: Plastic Consolidation, Structural Changes and Elasticity under Isotropic Loads. Phys. Rev. E 2008, 78, 031305. [Google Scholar] [CrossRef]
- Walton, O.R.; Braun, R.L. Viscosity, granular-temperature, and stress calculations for shearing assemblies of inelastic, frictional disks. J. Rheol. 1986, 30, 949–980. [Google Scholar] [CrossRef]
- Walton, O.R. Numerical simulation of inclined chute flows of monodisperse, inelastic, frictional spheres. Mech. Mater. 1993, 16, 239–247. [Google Scholar] [CrossRef]
- Zhang, P.; Ren, Q.; Lei, D. Hysteretic model for concrete under cyclic tension and tension-compression reversals. Eng. Struct. 2018, 163, 388–395. [Google Scholar] [CrossRef]
- Ji, A.; Li, T.A.; Rm, A.; Qu, B. Development of a hysteretic model for steel members under cyclic axial loading. J. Build. Eng. 2022, 46, 103798. [Google Scholar]
- Nip, A.; Gardner, L.; Elghazouli, A.Y. Ultimate behaviour of steel braces under cyclic loading. Proc. Inst. Civ. Eng.-Struct. Build. 2013, 166, 219–234. [Google Scholar] [CrossRef]
- Potyondy, D. PFC3D Flat-Joint Contact Model (Version 1); Technical Memorandum ICG7234-L; Itasca Consulting Group, Inc.: Minneapolis, MN, USA, 2013. [Google Scholar]
- Potyondy, D. PFC2D Flat-Joint Contact Model; Technical Memorandum ICG7138-L; Itasca Consulting Group, Inc.: Minneapolis, MN, USA, 2012. [Google Scholar]
- Potyondy, D.O. A Flat-Jointed Bonded-Particle Material for Hard Rock; In Proceedings of the 46th U. S. Rock Mechanics/Geomechanics Symposium, Chicago, IL, USA, 24–27 June 2012. Paper ARMA 12-501. [Google Scholar]
- Potyondy, D.O. Material-Modeling Support in PFC [fistPkg25]; Technical Memorandum ICG7766-L; Itasca Consulting Group, Inc.: Minneapolis, MN, USA, 2017. [Google Scholar]
- Potyondy, D. Flat-Joint Contact Model [Version 1]; Technical Memorandum 5-8106:16TM47; Itasca Consulting Group, Inc.: Minneapolis, MN, USA, 2016. [Google Scholar]
- Gucunski, N. Fundamentals of Continuum Mechanics of Soils 1991. Soil Sci. 1992, 154, 170. [Google Scholar] [CrossRef]
- Carcione, J.M.; Helle, H.B.; Gangi, A.F. Theory of borehole stability when drilling through salt formations. Geophysics 2006, 71, F31–F47. [Google Scholar] [CrossRef]
- Carcione, J.M.; Poletto, F. Seismic rheological model and reflection coefficients of the brittle–ductile transition. Pure Appl. Geophys. 2013, 170, 2021–2035. [Google Scholar] [CrossRef]
- Sun, X.; Mu, C.; Jiang, M.; Zhang, Y.; Yang, L.; Guo, B. Creep test and theoretical study of sandstone with different water content based on improved Nishihara model. J. Rock Mech. Eng. 2021, 40, 2411–2420. [Google Scholar]
- Song, Y.; Zhang, L.; Ren, J.; Chen, J.; Che, Y.; Yang, H.; Bi, R. Triaxial creep characteristics of red sandstone and its modeling under freeze-thaw environment. J. Geotech. Eng. 2021, 43, 841–849. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Contact Model | Model Type | Mechanical Behavior between Discrete Cells | Model Characteristics | Application Scenario | |
|---|---|---|---|---|---|
| Linear | Linear elasticity Discrete cells are not deformable | Contact force = linear force + damping force Contact torque is always equal to zero | Discrete units in contact produce linearly varying compression and friction and do not resist the relative rotation of the units. | Geotechnics | |
| HM (no-slip) | Nonlinear elasticity Discrete units can undergo small deformations | Contact force = Hertz nonlinear force + damping force Contact torque is always equal to zero | Discrete cells with small deformation variables produce nonlinear variations in squeezing and friction and do not resist relative rotation. | 1. Discrete units for dryland soils 2. Crusty materials 3. Small discrete units of detritus | |
| JKR | nonlinear elasticity | Contact force = JKR nonlinear force + damping force Contact moment = sliding resistance moment | JKR surface adsorption is significant at low pressures between small discrete cells, and adhesion will resist relative rotation. | 1. Dust-like substances that generate mutual adsorption 2. Small discrete units of sticky material (soil, feces, etc.) | |
| Bonding | Before bonding: nonlinear elasticity | Before bonding: | Consistent with HM model | Bonding bonds are generated before simulation and cannot be generated again once broken. | 1. Sandy soils 2. Conformations of straw fruits and exudates and prediction of their shear–extrusion destructive forces |
| Bonding: linear elasticity | When bonding: | Linear forces and damping can be stretched without slipping between discrete cells | |||
| Fracture: linear elasticity | After the break: | Consistent with the linear model | |||
| EEPA | Nonlinear elasticity Plastic deformable | Contact force = EEPA nonlinear force + viscous damping force Contact moment = rolling resistance distance | 1. Record of historical stress changes on discrete unit property changes after load application. 2. Discrete unit adhesion and flow. | 1. Pre-loading of materials that affect discrete units 2. Observation of the flow characteristics of the discrete unit and the study of the final molding of the discrete unit under force | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Wu, M.; Jiang, X. A Review of Contact Models’ Properties for Discrete Element Simulation in Agricultural Engineering. Agriculture 2024, 14, 238. https://doi.org/10.3390/agriculture14020238
Zhao Z, Wu M, Jiang X. A Review of Contact Models’ Properties for Discrete Element Simulation in Agricultural Engineering. Agriculture. 2024; 14(2):238. https://doi.org/10.3390/agriculture14020238
Chicago/Turabian StyleZhao, Zhihao, Mingliang Wu, and Xiaohu Jiang. 2024. "A Review of Contact Models’ Properties for Discrete Element Simulation in Agricultural Engineering" Agriculture 14, no. 2: 238. https://doi.org/10.3390/agriculture14020238