
Determination of Ellipsoidal Seed–Soil Interaction Parameters for DEM Simulation



Abstract
:1. Introduction
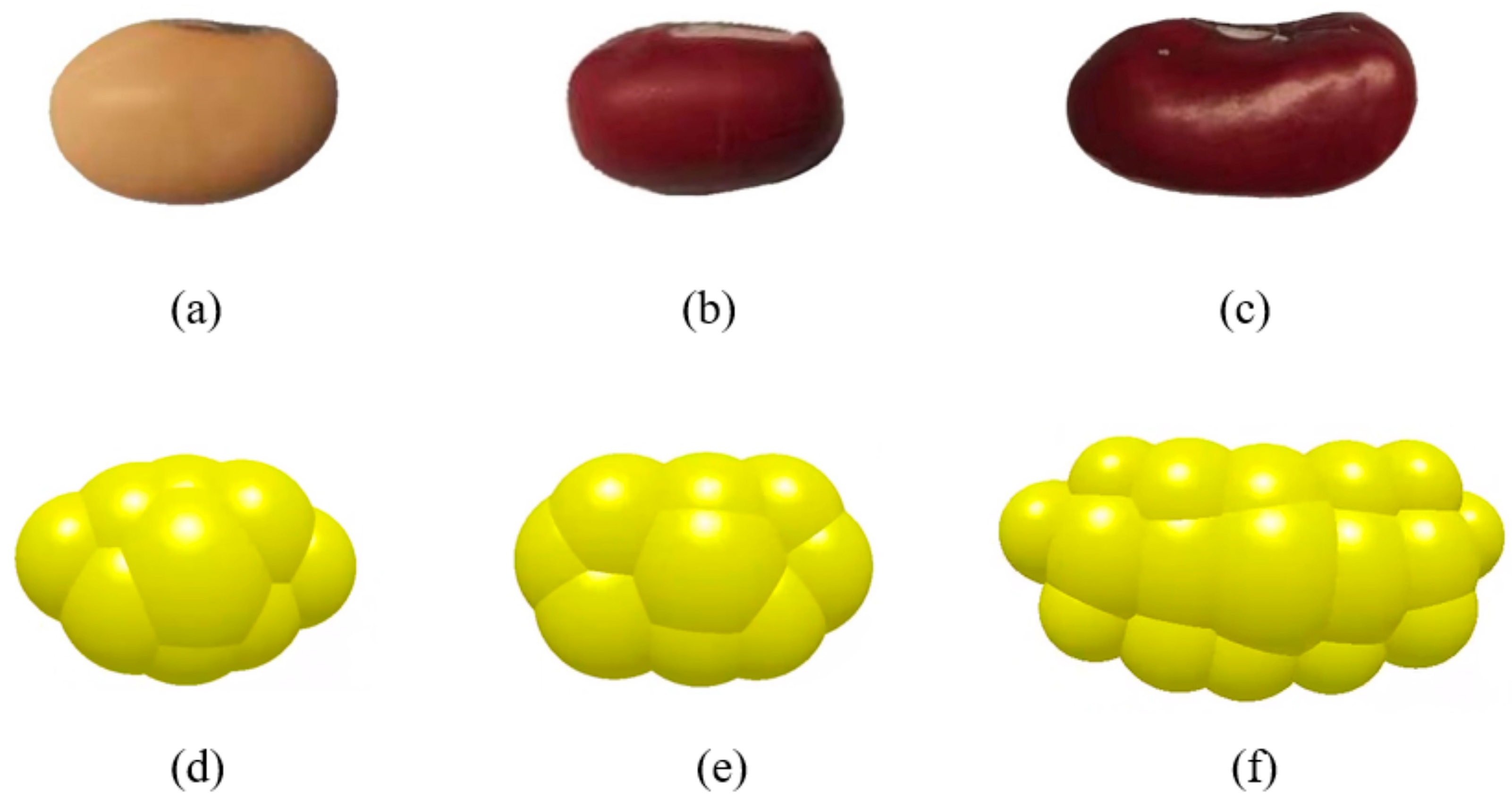
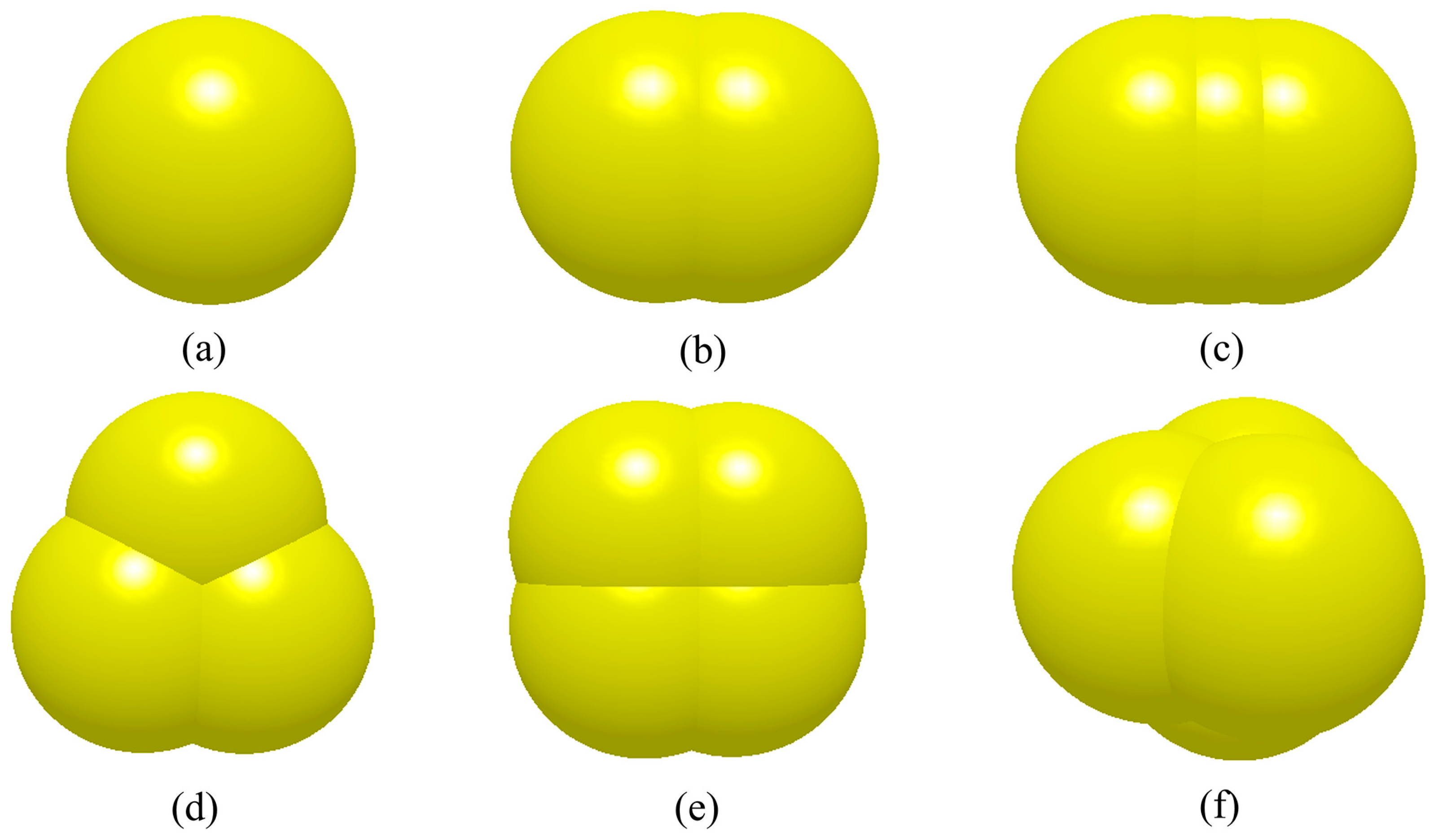
- The multi-sphere filling method was adopted to establish geometric models of ellipsoidal seeds and soil particles;
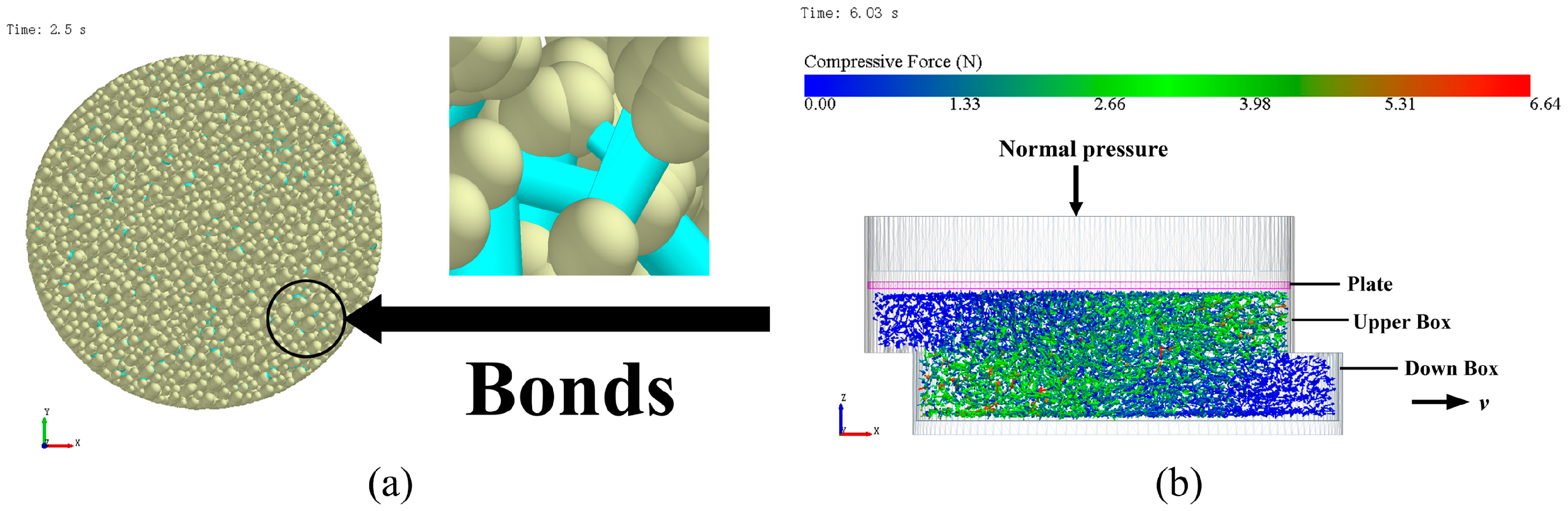
- The Hertz–Mindlin no-slip (HMNS) model was used to establish a model of ellipsoidal seed particles by considering the issue of multiple contact points. Due to the adhesion characteristics of sandy loam soil, the bonding key was added to the JKR model to simulate the contact properties of the soil;
- Through the combination of simulations and tests, the contact parameters between seeds and soil were calibrated. Both the path of steepest ascent test and Box–Behnken design (BBD) were considered, involving direct shear tests. Then, the restitution coefficient, static friction coefficient, and rolling friction coefficient between the ellipsoidal seeds and soil assembly were calibrated by a single-factor test;
- The parameter selection and established models were verified through the piling test between ellipsoidal seeds and soil.
2. Materials and Methods
2.1. Physical and Mechanical Test Analysis of Seeds
2.2. Physical and Mechanical Test Analysis of Soil
3. Seed and Soil Modeling
3.1. Discrete Element Model of Seeds
3.2. Discrete Element Model of Soil
4. Determination of Contact Parameters
4.1. Calibration of Contact Parameters of Soil Models
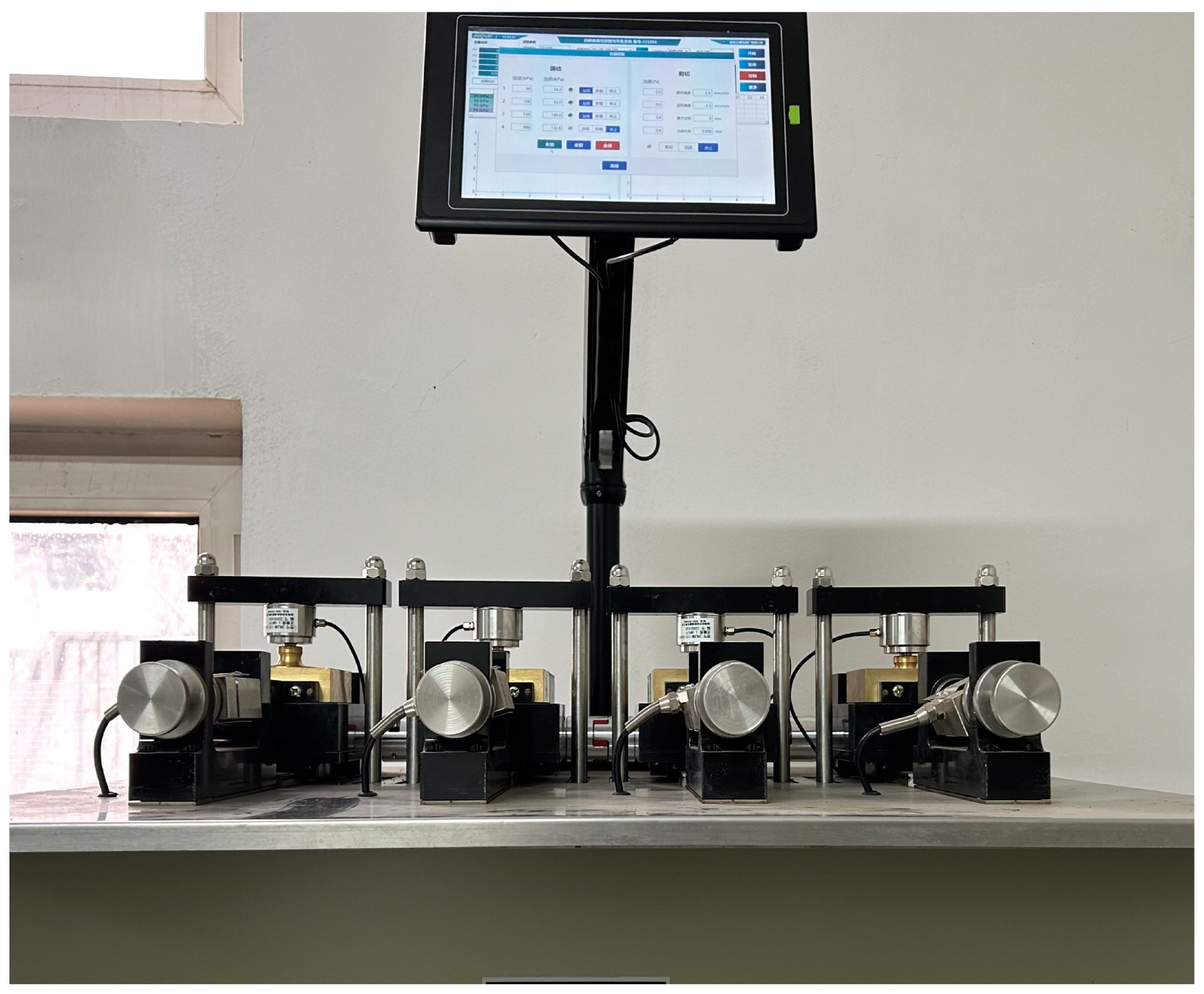
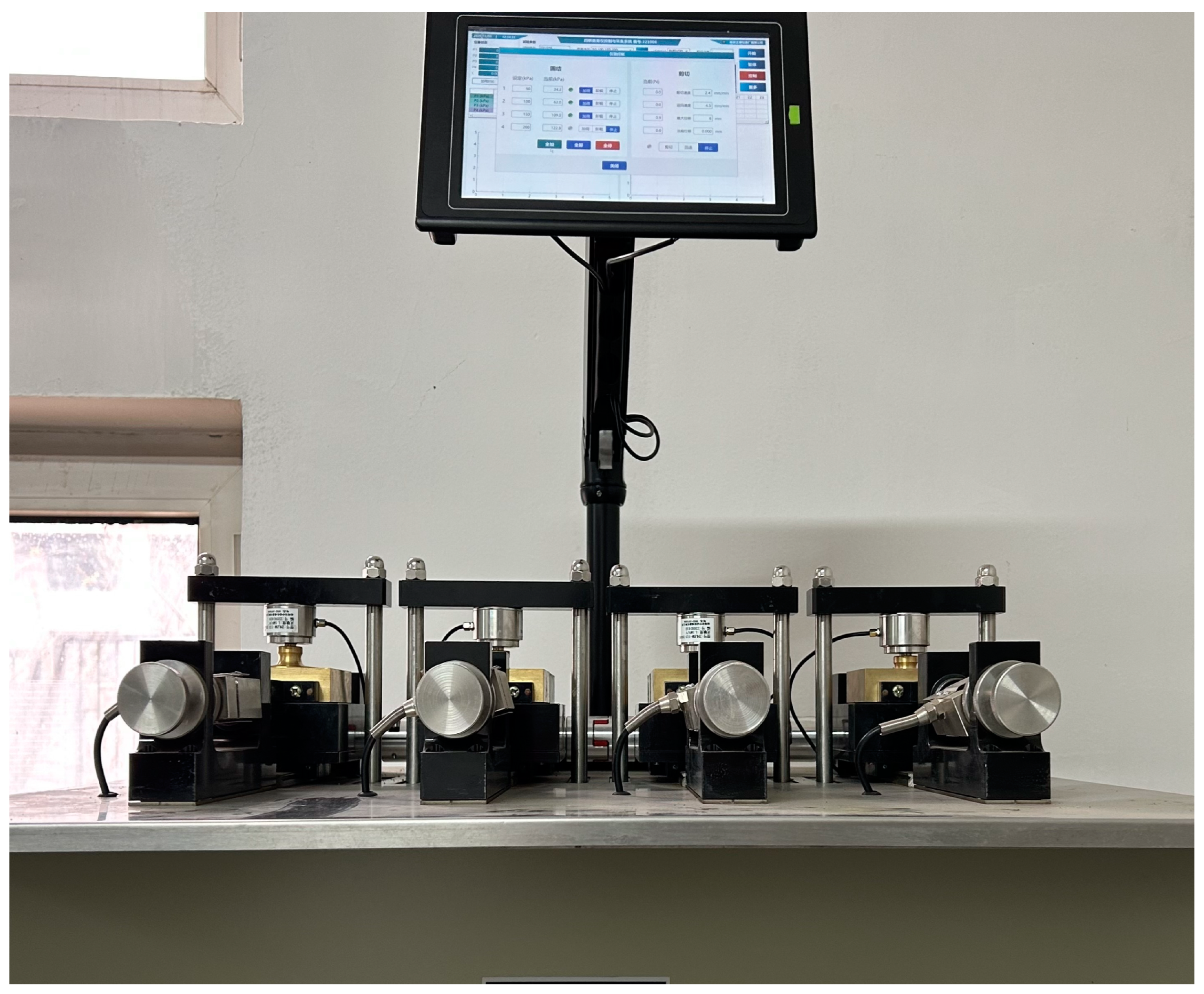
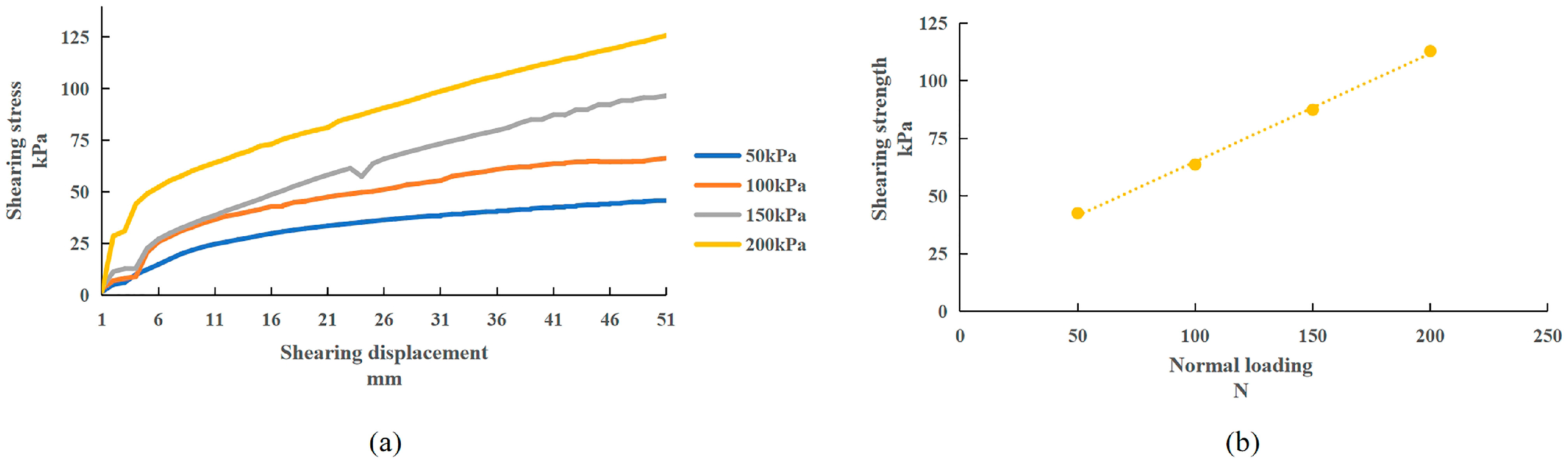
4.1.1. Direct Shear Test
4.1.2. Path of Steepest Ascent Method
4.2. Calibration of the Contact Parameters of the Seed–Soil Model
4.2.1. Calibration of the Seed–Soil Collision Restitution Coefficient Simulation Parameter
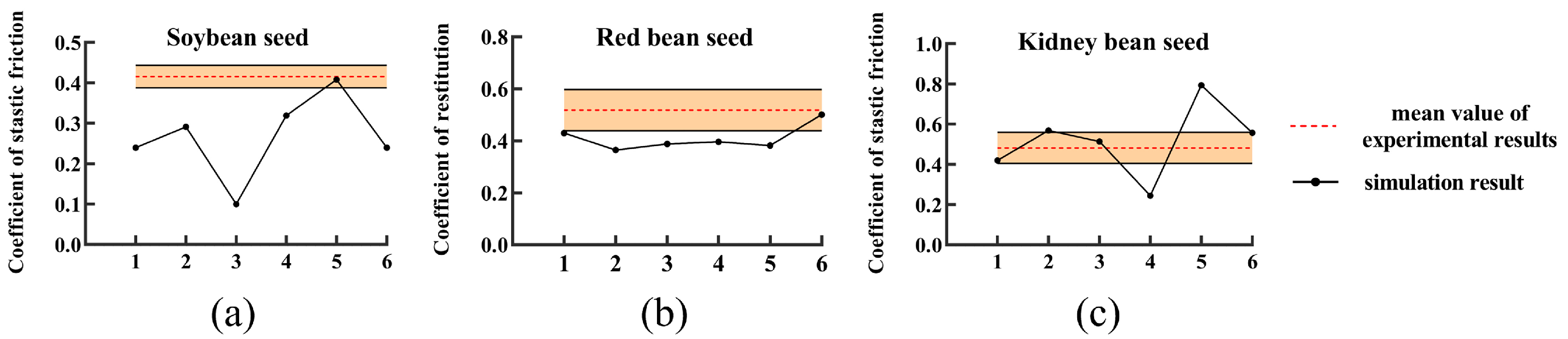
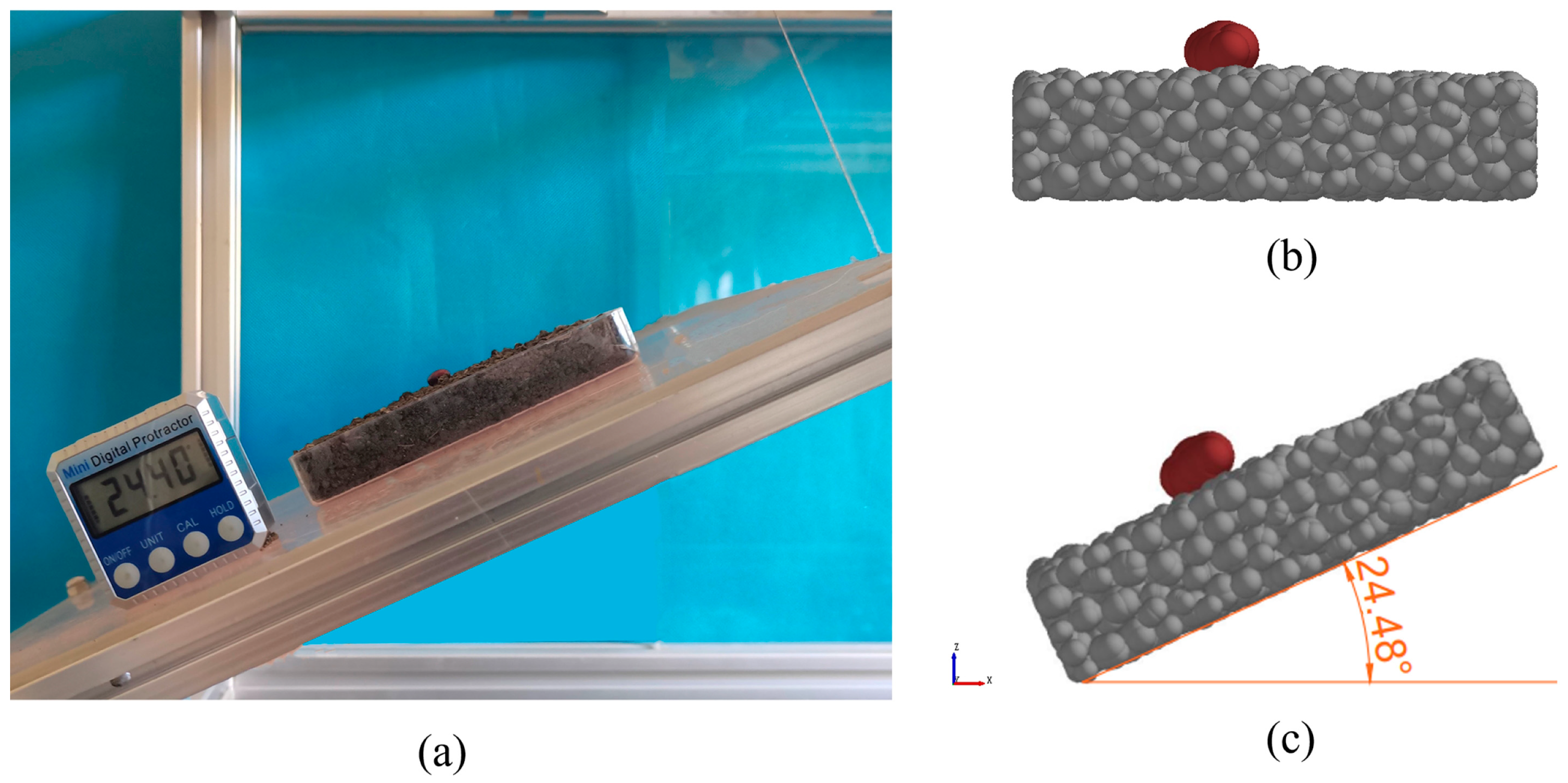
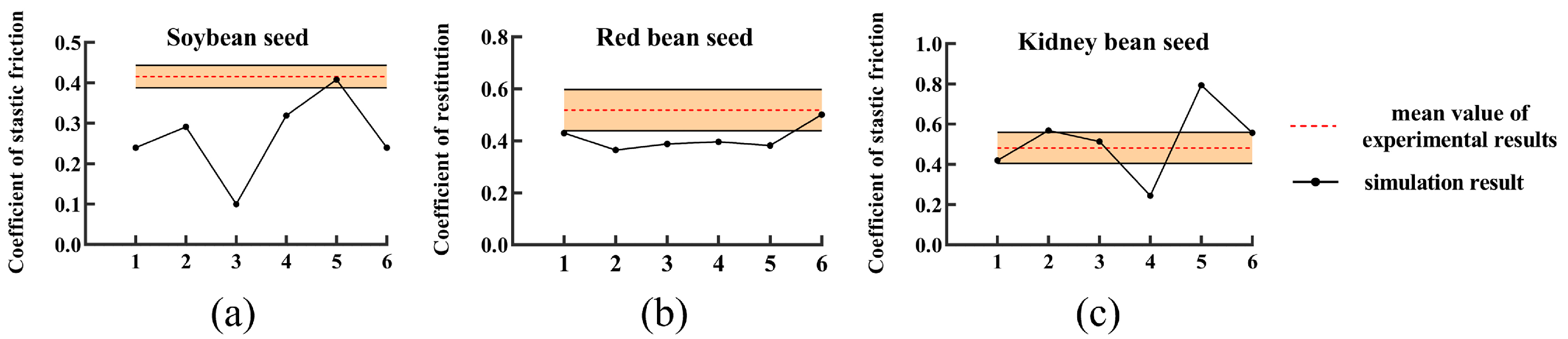
4.2.2. Calibration of the Seed–Soil Static Friction Coefficient Simulation Parameters
4.2.3. Calibration of the Seed–Soil Rolling Friction Coefficient Simulation Parameters
5. Model Accuracy Verification
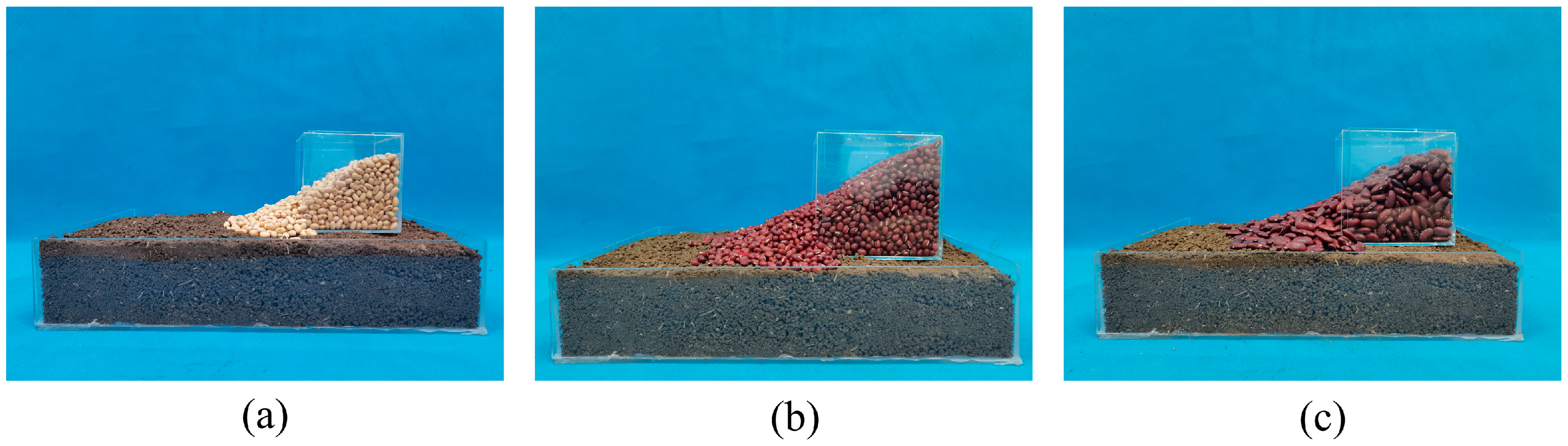
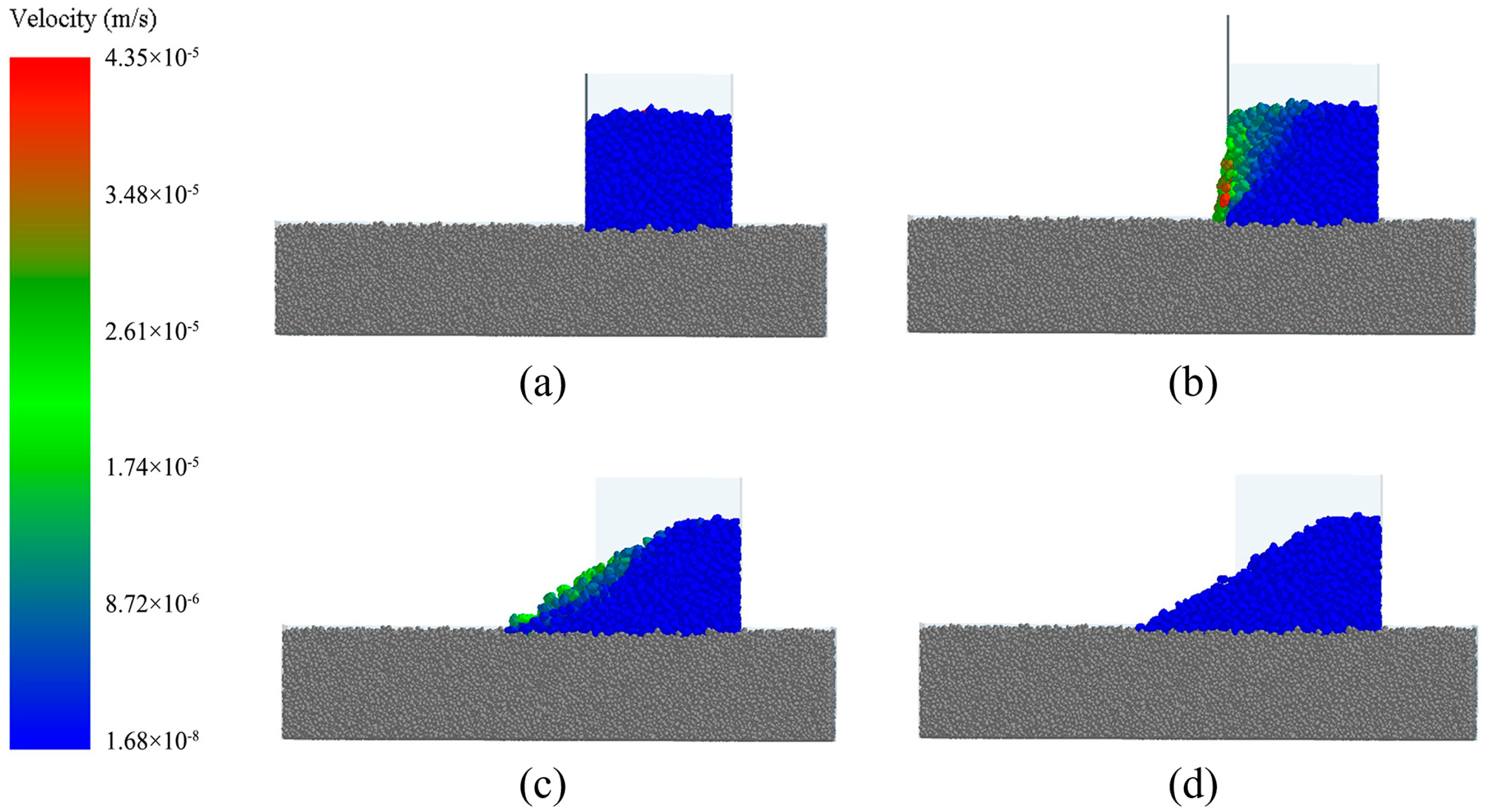
5.1. Seed-Soil Piling Test
5.2. Seed–Soil Piling Test Simulation
6. Discussion
6.1. Seed Modeling
6.2. Contact Model Selection
6.3. Parameter Calibration
7. Conclusions
- Considering the issue of multiple contact points, the HMNS model was used to establish a mechanical model of ellipsoidal seed particles. Considering the adhesion characteristics of sandy loam soil, the JKR + bonding model was selected to simulate the adhesion between the soil particles.
- The soil‒soil interface contact parameters were calibrated through direct shear tests. Both the path of the steepest ascent test and the BBD test were considered. The optimized parameter combination was obtained.
- The ellipsoidal seed‒soil restitution coefficient, static friction coefficient, and rolling friction coefficient were calibrated through a freefall experiment, slope method, and slope rolling method, respectively.
- A seed–soil piling experiment was used to verify the feasibility of the approach. By comparing the simulation and experimental results, the simulation results were close to the experimental results.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, C.; Xu, J.; Zheng, Z. Three-dimensional DEM tillage simulation: Validation of a suitable contact model for a sweep tool operating in cohesion and adhesion soil. J. Terramechanics 2023, 108, 59–67. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, D.; Yang, L. Modeling the interaction of soil and a vibrating subsoiler using the discrete element method. Comput. Electron. Agr. 2020, 174, 105518. [Google Scholar] [CrossRef]
- Shmulevich, I.; Asaf, Z.; Rubinstein, D. Interaction between soil and a wide cutting blade using the discrete element method. Soil. Till Res. 2007, 97, 37–50. [Google Scholar] [CrossRef]
- Gao, X.; Cui, T.; Zhou, Z. DEM study of particle motion in novel high-speed seed metering device. Adv. Powder Technol. 2021, 32, 1438–1449. [Google Scholar] [CrossRef]
- Chen, Y.; Gao, X.; Jin, X. Calibration and Analysis of Seeding Parameters of Cyperus Esculentus Seeds Based on Discrete Element Simulation. Trans. Chin. Soc. Agric. Mach. 2023, 12, 58–69. [Google Scholar]
- Zhou, H.; Chen, Y.; Sadek, M. Modelling of soil-seed contact using the Discrete Element Method (DEM). Biosyst. Eng. 2014, 121, 56–66. [Google Scholar] [CrossRef]
- Zeng, Z.; Chen, Y.; Qi, L. Simulation of cotyledon-soil dynamics using the discrete element method (DEM). Com. Electron. Agr. 2020, 174, 105505. [Google Scholar] [CrossRef]
- Boac, J.; Casada, M.; Maghirang, R.; Harner, J. Material and interaction properties of selected grains and oilseeds for modeling discrete particles. Am. Soc. Agric. Biol. Eng. 2010, 53, 1201–1216. [Google Scholar]
- LoCurto, G.; Zhang, X.; Zakirov, V.; Bucklin, R. Soybean impacts: Experiments and dynamic simulations. Trans. ASAE 1999, 40, 789–794. [Google Scholar] [CrossRef]
- Vu-Quoc, L.; Zhang, X.; Waltion, O. A 3-D discrete-element method for dry granular flows of ellipsoidal particles. Comput. Methods Appl. Mech. Eng. 2000, 187, 483–528. [Google Scholar] [CrossRef]
- Xu, T.; Yu, J.; Yu, Y.; Wang, Y. A modelling and verification approach for soybean seed particles using the discrete element method. Adv. Powder Technol. 2018, 29, 3274–3290. [Google Scholar] [CrossRef]
- Dexter, A.; Hewitt, J. The structure of beds of spherical particles. Eur. J. Soil. Sci. 2006, 29, 146–155. [Google Scholar] [CrossRef]
- Knuth, M.A.; Johnson, J.B.; Hopkins, M.A.; Sullivan, R.J.; Moore, J.M. Discrete element modeling of a Mars Exploration Rover wheel in granular material. J. Terramechanics 2012, 49, 27–36. [Google Scholar] [CrossRef]
- Kruggel-Emden, H.; Rickelt, S.; Wirtz, S.; Scherer, V. A study on the validity of the multi-sphere Discrete Element Method. Powder Technol. 2008, 188, 153–165. [Google Scholar] [CrossRef]
- Kodam, M.; Bharadwaj, R.; Curtis, J. Force model considerations for glued sphere discrete element method simulations. Chem. Eng. Sci. 2009, 64, 3466–3475. [Google Scholar] [CrossRef]
- Höhner, D.; Wirtz, S.; Kruggel-Emden, H.; Scherer, V. Comparison of the multi-sphere and polyhedral approach to simulate non-spherical particles within the discrete element method: Influence on temporal force evolution for multiple contacts. Powder Technol. 2011, 208, 643–656. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, J.; Wang, Y. A study on the modelling method of maize-seed particles based on the discrete element method. Powder Technol. 2020, 374, 353–376. [Google Scholar] [CrossRef]
- Yan, D.; Yu, J.; Liang, A. Comparative Study on the Modelling of Soybean Particles Based on the Discrete Element Method. Processes 2021, 9, 286. [Google Scholar] [CrossRef]
- Mudarisov, S.; Farkhutdinov, I.; Khamaletdinov, R.; Khasanov, E.; Mukhametdinov, A. Evaluation of the significance of the contact model particle parameters in the modelling of wet soils by the discrete element method. Soil. Till. Res. 2022, 215, 105228. [Google Scholar] [CrossRef]
- Yang, L.; Li, J.; Lai, Q.; Zhao, L.; Li, J.; Zeng, R.; Zhang, Z. Discrete element contact model and parameter calibration for clayey soil particles in the Southwest hill and mountain region. J. Terramechanics 2024, 111, 73–87. [Google Scholar] [CrossRef]
- Jaradat, K.A.; Abdelaziz, S.L. Simplifying the physico-chemical contacts in cohesive soils for efficient DEM simulations. Comput. Geotech. 2023, 154, 105155. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, Q.; Huang, Y.; Ji, J. An efficient method for determining DEM parameters of a loose cohesive soil modelled using hysteretic spring and linear cohesion contact models. Biosyst. Eng. 2022, 215, 283–294. [Google Scholar] [CrossRef]
- Smock, D.; Parry, L.R. Drop Test Device. U.S. Patent 5390535 A, 21 February 1995. [Google Scholar]
- Wong, C.; Daniel, M.; Rongong, J. Energy dissipation prediction of particle dampers. J. Sound Vib. 2009, 319, 91–118. [Google Scholar] [CrossRef]
- ASAE S368.2000 (R2017); Compression Test of Food Materials of Convex Shape. ASAE: St. Joseph, Mi, USA, 2000.
- Xu, T.; Fu, H.; Liu, M. Ellipsoidal seed modeling and simulation parameter selection based on the discrete element method. Mater. Today Commun. 2023, 37, 106923. [Google Scholar] [CrossRef]
- Xu, T.; Zhang, R.; Jiang, X. Simulation and Analysis of the Working Process of Soil Covering and Compacting of Precision Seeding Units Based on the Coupling Model of DEM with MBD. Processes 2022, 10, 1103. [Google Scholar] [CrossRef]
- Johnson, K.; Kendall, K.; Roberts, A. Surface energy and the contact of elastic solids. Proc. R. Soc. Lond. Ser. A-Math. Phys. Eng. Sci. 1971, 324, 301–313. [Google Scholar]
- Thornton, C.; Yin, K. Impact of elastic spheres with and without adhesion. Powder Technol. 1991, 65, 153–166. [Google Scholar] [CrossRef]
- Gong, H.; Chen, Y.; Wu, S.; Tang, Z. Simulation of canola seedling emergence dynamics under different soil compaction levels using the discrete element method (DEM). Soil. Till. Res. 2022, 223, 105461. [Google Scholar] [CrossRef]
- Song, Z.; Li, H.; Yan, Y. Calibration Method of Contact Characteristic Parameters of Soil in Mulberry Field Based on Unequal-diameter Particles DEM Theory. Trans. Chin. Soc. Agric. Mach. 2022, 53, 1000–1298. [Google Scholar]
- Liu, F.; Chen, J. Effect of calibration experiments on the micro-parameters of wheat required in discrete element simulations. In ASABE Annual International Meeting; American Society of Agricultural and Biological Engineers: Spokane, DC, USA, 2017. [Google Scholar]
- Liu, M.; Wang, J.; Feng, W. Calibration of Model Parameters for Soda Saline Soil-Subsoiling Component Interaction Based on DEM. Appl. Sci. 2023, 13, 11596. [Google Scholar] [CrossRef]
- Xu, T.; Zhang, R.; Jiang, X. Study on Verification Approach and Multicontact Points Issue When Modeling Cyperus esculentus Seeds Based on DEM. Processes 2023, 11, 825. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Seed Name | MC/ % | L/ mm | W/ mm | T/ mm | S | SD | Sphericity/ % | Density/ kg/m3 |
|---|---|---|---|---|---|---|---|---|
| Soybean | 14.77 | 8.38 | 5.48 | 4.48 | 1.5347 | 0.1293 | 70.49 | 1370 |
| Red bean | 18.50 | 7.54 | 5.24 | 4.87 | 1.4418 | 0.0891 | 76.55 | 1300 |
| Kidney bean | 13.78 | 16.41 | 7.93 | 5.69 | 2.0735 | 0.1125 | 55.14 | 1330 |
| No. | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| JKR surface energy (J/m2) | 3.5 | 4.5 | 5.5 | 6.5 | 7.5 |
| Normal stiffness per unit area (N/m3) | 1 × 106 | 2 × 106 | 3 × 106 | 4 × 106 | 5 × 106 |
| Shear stiffness per unit area (N/m3) | 7 × 105 | 6 × 105 | 5 × 105 | 4 × 105 | 3 × 105 |
| Critical normal stress (Pa) | 1000 | 1800 | 2600 | 3400 | 4000 |
| Critical shear stress (Pa) | 4000 | 3400 | 2600 | 1800 | 1000 |
| Maximum shear strength (kPa) | 38.5 | 41.1 | 38.6 | 40.1 | 39.5 |
| Relative error | 9.6% | 3.5% | 9.4% | 5.9% | 7.3% |
| No. | Level | −1 | 0 | +1 |
|---|---|---|---|---|
| A | JKR surface energy (J/m2) | 3.5 | 4.5 | 5.5 |
| B | Normal stiffness per unit area (106 N/m3) | 1 | 2 | 3 |
| C | Shear stiffness per unit area (105 N/m3) | 7 | 6 | 5 |
| D | Critical normal stress (Pa) | 1000 | 1800 | 2600 |
| E | Critical shear stress (Pa) | 4000 | 3400 | 2600 |
| No. | JKR Surface Energy (J/m2) | Normal Stiffness per Unit Area (106 N/m3) | Shear Stiffness per Unit Area (105 N/m3) | Critical Normal Stress (Pa) | Critical Shear Stress (Pa) | Maximum Shear Strength (kPa) |
|---|---|---|---|---|---|---|
| 1 | 3.5 | 1 | 6 | 1800 | 3300 | 38.6 |
| 2 | 5.5 | 1 | 6 | 1800 | 3300 | 39.7 |
| 3 | 3.5 | 3 | 6 | 1800 | 3300 | 40.2 |
| 4 | 5.5 | 3 | 6 | 1800 | 3300 | 40 |
| 5 | 4.5 | 2 | 5 | 1000 | 3300 | 39.1 |
| 6 | 4.5 | 2 | 7 | 1000 | 3300 | 39.6 |
| 7 | 4.5 | 2 | 5 | 2600 | 3300 | 38.3 |
| 8 | 4.5 | 2 | 7 | 2600 | 3300 | 38.4 |
| 9 | 4.5 | 1 | 6 | 1800 | 2600 | 38.3 |
| 10 | 4.5 | 3 | 6 | 1800 | 2600 | 40.2 |
| 11 | 4.5 | 1 | 6 | 1800 | 4000 | 39.8 |
| 12 | 4.5 | 3 | 6 | 1800 | 4000 | 38.7 |
| 13 | 3.5 | 2 | 5 | 1800 | 3300 | 38.4 |
| 14 | 5.5 | 2 | 5 | 1800 | 3300 | 39.1 |
| 15 | 3.5 | 2 | 7 | 1800 | 3300 | 38.7 |
| 16 | 5.5 | 2 | 7 | 1800 | 3300 | 38.2 |
| 17 | 4.5 | 2 | 6 | 1000 | 2600 | 39.9 |
| 18 | 4.5 | 2 | 6 | 2600 | 2600 | 38.9 |
| 19 | 4.5 | 2 | 6 | 1000 | 4000 | 38.9 |
| 20 | 4.5 | 2 | 6 | 2600 | 4000 | 39.3 |
| 21 | 4.5 | 1 | 5 | 1800 | 3300 | 39.1 |
| 22 | 4.5 | 3 | 5 | 1800 | 3300 | 39.4 |
| 23 | 4.5 | 1 | 7 | 1800 | 3300 | 37.5 |
| 24 | 4.5 | 3 | 7 | 1800 | 3300 | 38.9 |
| 25 | 3.5 | 2 | 6 | 1000 | 3300 | 39.5 |
| 26 | 5.5 | 2 | 6 | 1000 | 3300 | 39.3 |
| 27 | 3.5 | 2 | 6 | 2600 | 3300 | 37.9 |
| 28 | 5.5 | 2 | 6 | 2600 | 3300 | 40.2 |
| 29 | 4.5 | 2 | 5 | 1800 | 2600 | 38.2 |
| 30 | 4.5 | 2 | 7 | 1800 | 2600 | 38.2 |
| 31 | 4.5 | 2 | 5 | 1800 | 4000 | 38.1 |
| 32 | 4.5 | 2 | 7 | 1800 | 4000 | 38.4 |
| 33 | 3.5 | 2 | 6 | 1800 | 2600 | 39.2 |
| 34 | 5.5 | 2 | 6 | 1800 | 2600 | 39.3 |
| 35 | 3.5 | 2 | 6 | 1800 | 4000 | 38.3 |
| 36 | 5.5 | 2 | 6 | 1800 | 4000 | 39.8 |
| 37 | 4.5 | 1 | 6 | 1000 | 3300 | 40.9 |
| 38 | 4.5 | 3 | 6 | 1000 | 3300 | 39.2 |
| 39 | 4.5 | 1 | 6 | 2600 | 3300 | 39.1 |
| 40 | 4.5 | 3 | 6 | 2600 | 3300 | 40.1 |
| 41 | 4.5 | 2 | 6 | 1800 | 3300 | 41.8 |
| 42 | 4.5 | 2 | 6 | 1800 | 3300 | 42.2 |
| 43 | 4.5 | 2 | 6 | 1800 | 3300 | 42.8 |
| 44 | 4.5 | 2 | 6 | 1800 | 3300 | 42.6 |
| 45 | 4.5 | 2 | 6 | 1800 | 3300 | 42.4 |
| 46 | 4.5 | 2 | 6 | 1800 | 3300 | 42.1 |
| Source | Sum of Squares | df | Mean Square | F-Value | p-Value | |
|---|---|---|---|---|---|---|
| Model | 74.15 | 20 | 3.71 | 22.12 | <0.0001 | Significant |
| A | 1.44 | 1 | 1.44 | 8.59 | 0.0071 | |
| B | 0.8556 | 1 | 0.8556 | 5.11 | 0.0328 | |
| C | 0.2025 | 1 | 0.2025 | 1.21 | 0.2822 | |
| D | 1.10 | 1 | 1.10 | 6.58 | 0.0167 | |
| E | 0.0506 | 1 | 0.0506 | 0.3021 | 0.5875 | |
| AB | 0.4225 | 1 | 0.4225 | 2.52 | 0.1249 | |
| AC | 0.3600 | 1 | 0.3600 | 2.15 | 0.1552 | |
| AD | 1.56 | 1 | 1.56 | 9.32 | 0.0053 | |
| AE | 0.4900 | 1 | 0.4900 | 2.92 | 0.0997 | |
| BC | 0.3025 | 1 | 0.3025 | 1.80 | 0.1912 | |
| BD | 1.82 | 1 | 1.82 | 10.87 | 0.0029 | |
| BE | 2.25 | 1 | 2.25 | 13.42 | 0.0012 | |
| CD | 0.0400 | 1 | 0.0400 | 0.2387 | 0.6294 | |
| CE | 0.0225 | 1 | 0.0225 | 0.1342 | 0.7172 | |
| DE | 0.4900 | 1 | 0.4900 | 2.92 | 0.0997 | |
| A2 | 20.13 | 1 | 20.13 | 120.11 | <0.0001 | |
| B2 | 13.50 | 1 | 13.5 | 80.55 | <0.0001 | |
| C2 | 44.26 | 1 | 44.26 | 264.10 | <0.0001 | |
| D2 | 15.56 | 1 | 15.56 | 92.86 | <0.0001 | |
| E2 | 27.05 | 1 | 27.05 | 161.37 | <0.0001 | |
| Residual | 4.19 | 25 | 0.1676 | |||
| Lack of fit | 3.54 | 20 | 0.1771 | 1.37 | 0.3923 | Not significant |
| Pure error | 0.6483 | 5 | 0.1297 | |||
| Cor total | 78.34 | 45 |
| Materials | Parameters | Values | Source |
|---|---|---|---|
| Soils | Density/kg·m−3 | 1950 | Measured |
| Shear modulus/Pa | 2.73 × 106 | Reference [27] previous work | |
| Poisson’s ratio | 0.2 | Reference [27] previous work | |
| Coefficient of restitution | 0.3 | Reference [27] previous work | |
| Static friction coefficient | 0.5 | Reference [27] previous work | |
| Coefficient of rolling friction | 0.03 | Reference [27] previous work | |
| Surface energy/J·m−2 | 4.436 | Calibrated (direct shear test) | |
| Normal stiffness per unit area (106 N/m3) | 2.86 | Calibrated (direct shear test) | |
| Shear stiffness per unit area (105 N/m3) | 5.54 | Calibrated (direct shear test) | |
| Critical normal stress (Pa) | 1833 | Calibrated (direct shear test) | |
| Critical shear stress (Pa) | 3332 | Calibrated (direct shear test) | |
| Kidney beans | Density/kg·m−3 | 1340 | Measured |
| Shear modulus/Pa | 4.535 × 107 | Measured | |
| Poisson’s ratio | 0.4 | Reference [26] | |
| Coefficient of restitution | 0.45 | Measured | |
| Static friction coefficient | 0.48 | Measured | |
| Coefficient of rolling friction | 0 | Measured | |
| Coefficient of restitution with soil | 0.25 | Calibrated (single factor experiments) | |
| Static friction coefficient with soil | 0.5 | Calibrated (single factor experiments) | |
| Coefficient of rolling friction with soil | 0.14 | Calibrated (single factor experiments) | |
| Red beans | Density/kg·m−3 | 1300 | Measured |
| Shear modulus/Pa | 1.414 × 107 | Measured | |
| Poisson’s ratio | 0.4 | Reference [26] | |
| Coefficient of restitution | 0.45 | Measured | |
| Static friction coefficient | 0.48 | Measured | |
| Coefficient of rolling friction | 0 | Measured | |
| Coefficient of restitution with soil | 0.25 | Calibrated (single factor experiments) | |
| Static friction coefficient with soil | 0.65 | Calibrated (single factor experiments) | |
| Coefficient of rolling friction with soil | 0.14 | Calibrated (single factor experiments) | |
| Soybean | Density/kg·m−3 | 1370 | Measured |
| Shear modulus/Pa | 1.768 × 107 | Measured | |
| Poisson’s ratio | 0.4 | Reference [26] | |
| Coefficient of restitution | 0.45 | Measured | |
| Static friction coefficient | 0.48 | Measured | |
| Coefficient of rolling friction | 0.04 | Measured | |
| Coefficient of restitution with soil | 0.25 | Calibrated (single factor experiments) | |
| Static friction coefficient with soil | 0.6 | Calibrated (single factor experiments) | |
| Coefficient of rolling friction with soil | 0.10 | Calibrated (single factor experiments) |
| Seed | Stacking Angle θ/° | SD/° |
|---|---|---|
| Soybean | 29.12 | 0.9945 |
| Red bean | 26.57 | 0.2354 |
| Kidney bean | 27.09 | 0.5801 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, T.; Fu, H.; Yu, J.; Li, C.; Wang, J.; Zhang, R. Determination of Ellipsoidal Seed–Soil Interaction Parameters for DEM Simulation. Agriculture 2024, 14, 376. https://doi.org/10.3390/agriculture14030376
Xu T, Fu H, Yu J, Li C, Wang J, Zhang R. Determination of Ellipsoidal Seed–Soil Interaction Parameters for DEM Simulation. Agriculture. 2024; 14(3):376. https://doi.org/10.3390/agriculture14030376
Chicago/Turabian StyleXu, Tianyue, Hao Fu, Jianqun Yu, Chunrong Li, Jingli Wang, and Ruxin Zhang. 2024. "Determination of Ellipsoidal Seed–Soil Interaction Parameters for DEM Simulation" Agriculture 14, no. 3: 376. https://doi.org/10.3390/agriculture14030376
APA StyleXu, T., Fu, H., Yu, J., Li, C., Wang, J., & Zhang, R. (2024). Determination of Ellipsoidal Seed–Soil Interaction Parameters for DEM Simulation. Agriculture, 14(3), 376. https://doi.org/10.3390/agriculture14030376