
The Simulation and Parameter Optimization of the Hole-Forming Process of a Duckbilled Hole-Forming Device
Abstract
:1. Preface
2. Analysis of the Hole-Forming Device Structure and Hole-Forming Process
2.1. The Hole-Forming Device Structure
2.2. Analysis of the Motion Process of the Hole-Forming Device
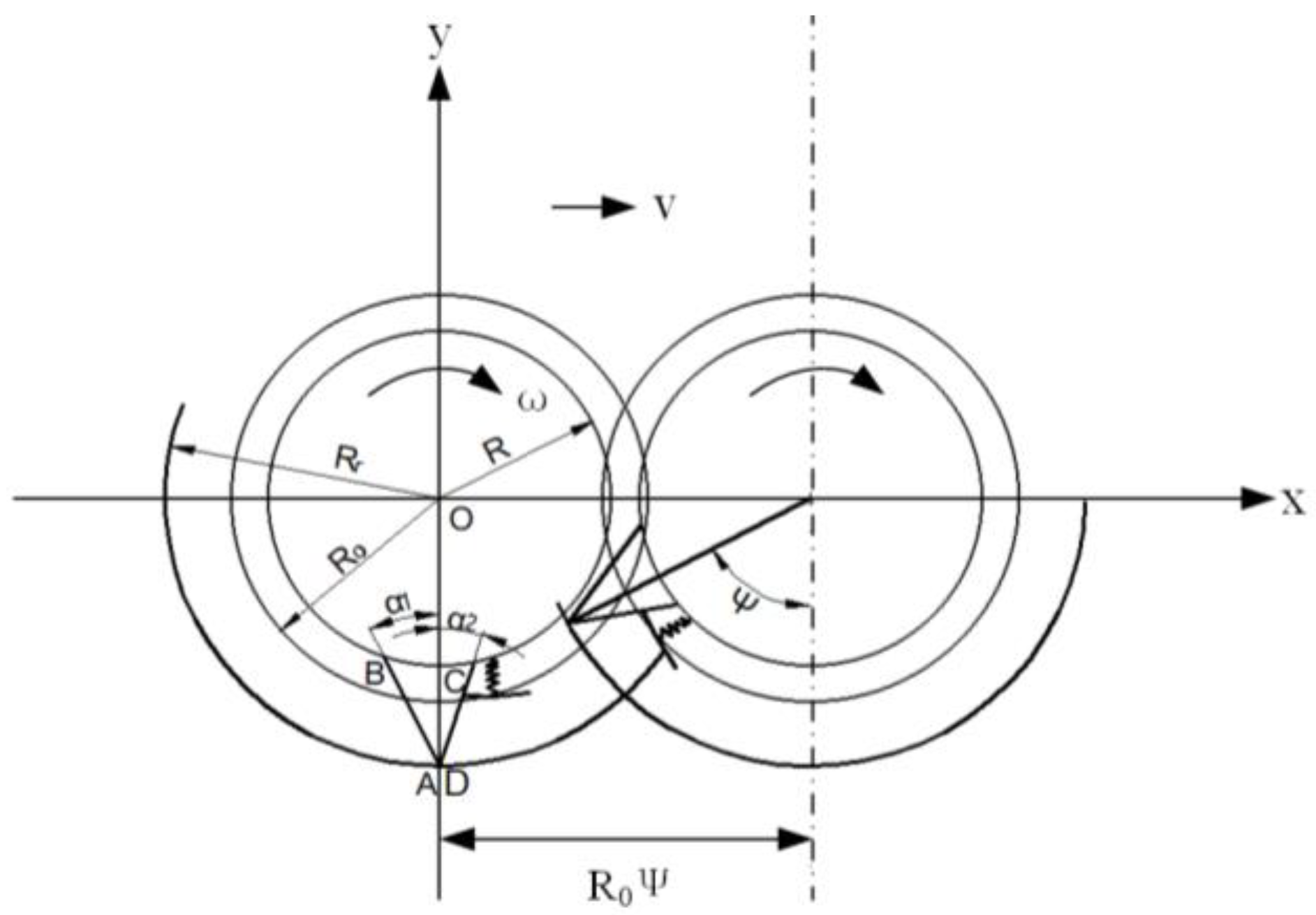
2.2.1. Analysis of Duckbill Motion Trajectory
2.2.2. Soil Hole Contour Analysis
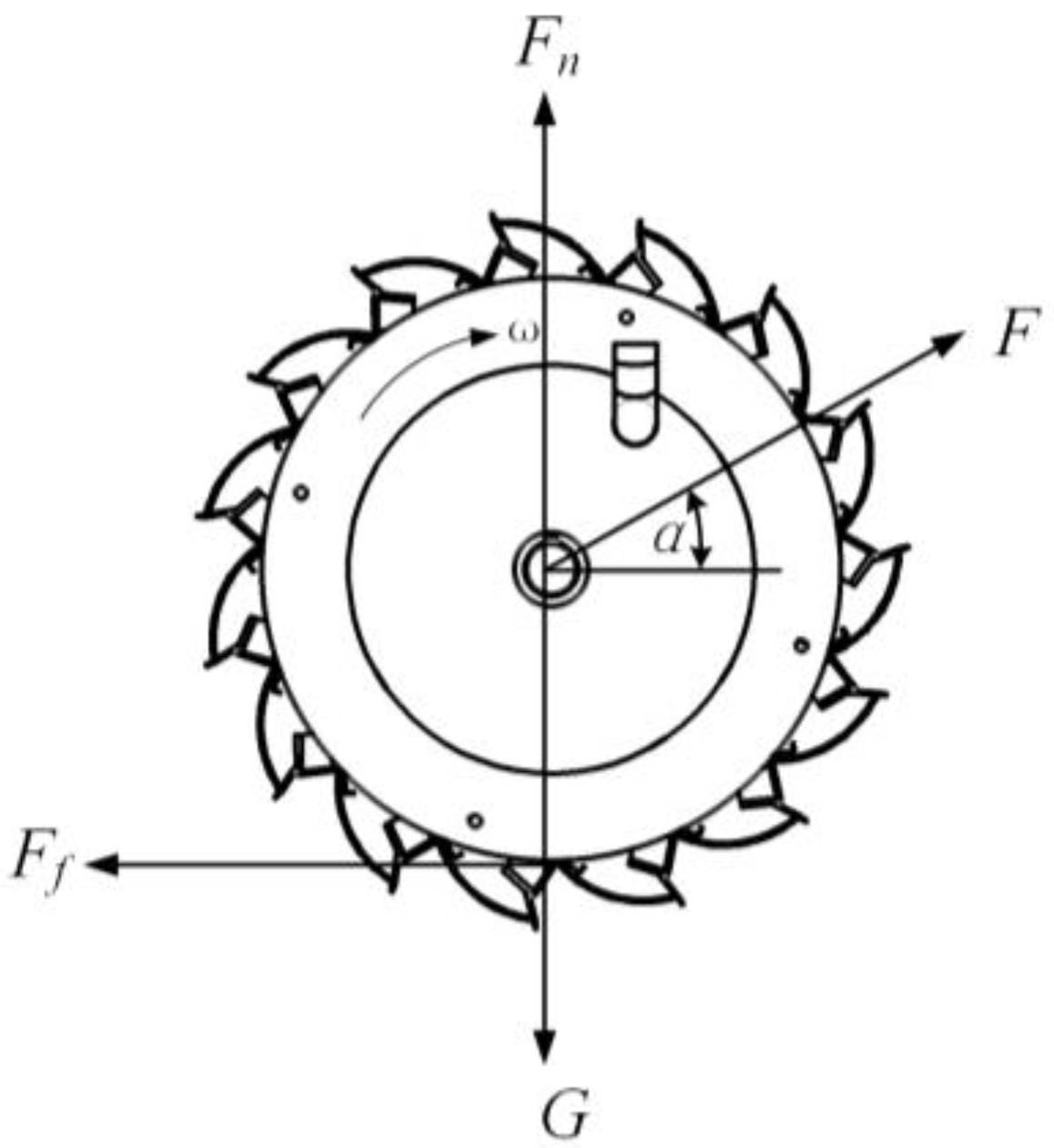
2.2.3. Dynamic Analysis of the Hole-Forming Device
3. Simulation Analysis of Hole-Forming of the Hole-Forming Device
3.1. Multi-Body Dynamics Modeling
3.2. Soil Discrete Element Modelling
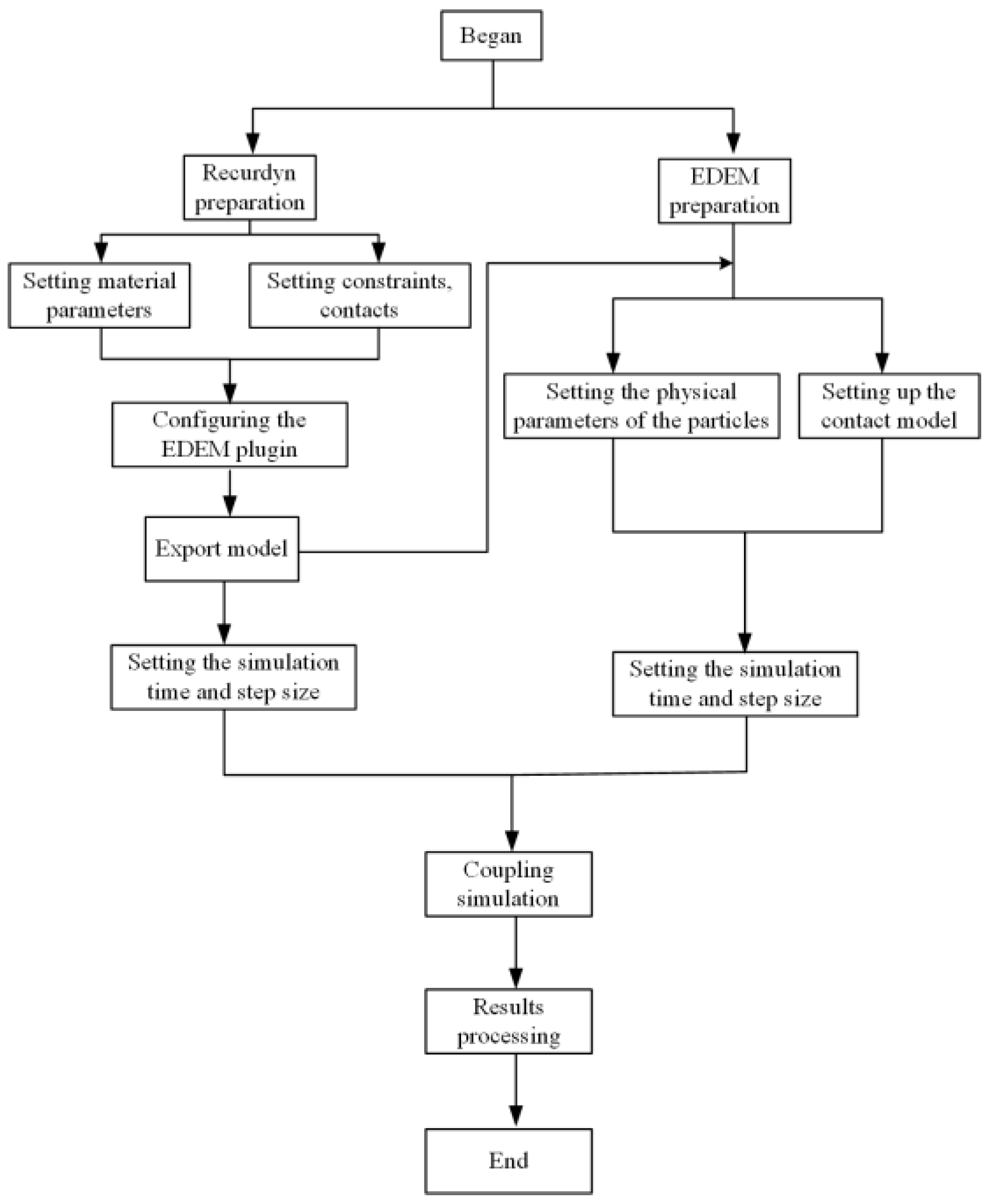
3.3. Coupling Simulation
3.3.1. Coupling Simulation of a Single Duckbill
3.3.2. Integral Simulation of the Hole-Forming Device
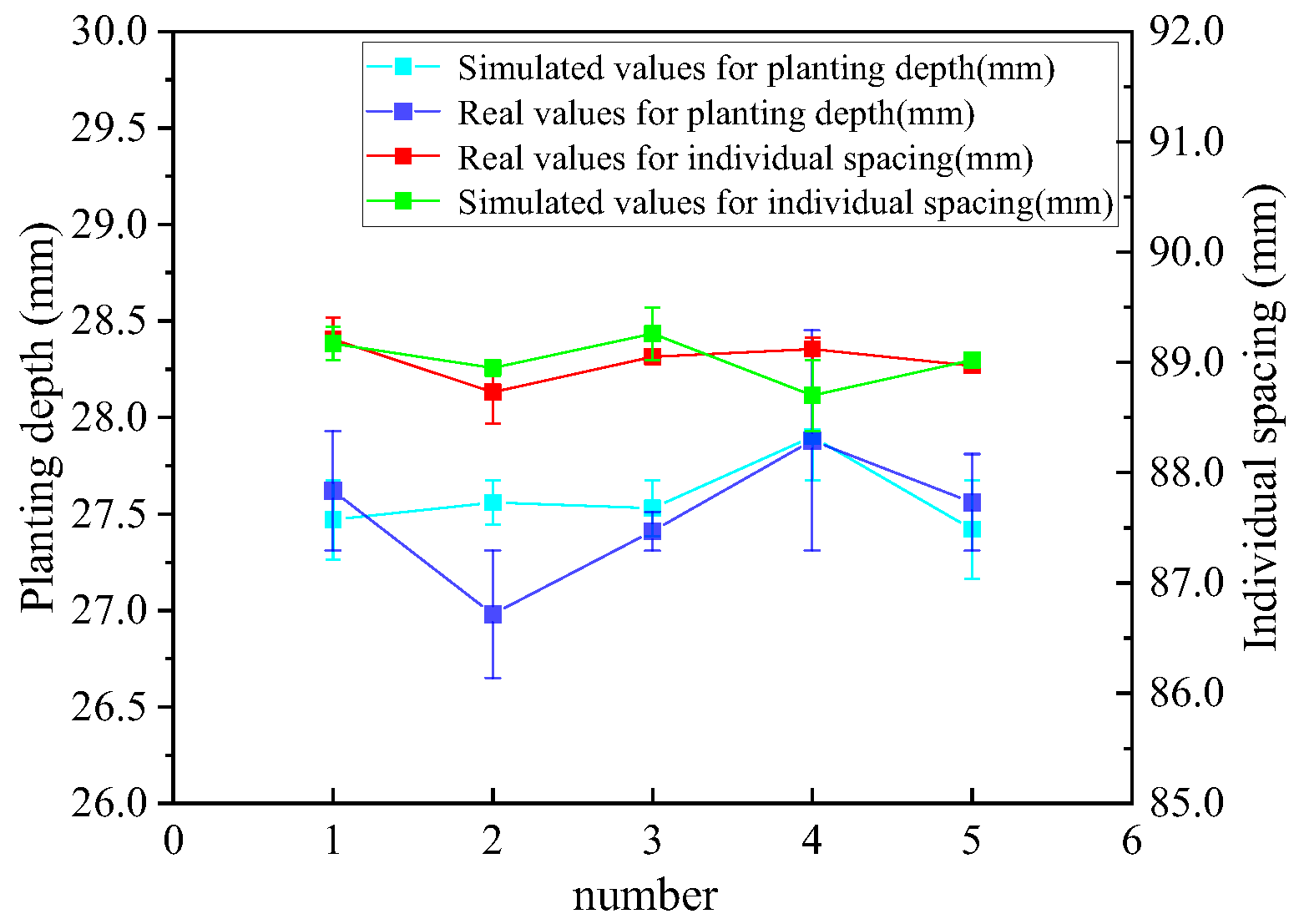
3.4. Model Validation
4. Analysis of Simulation Results
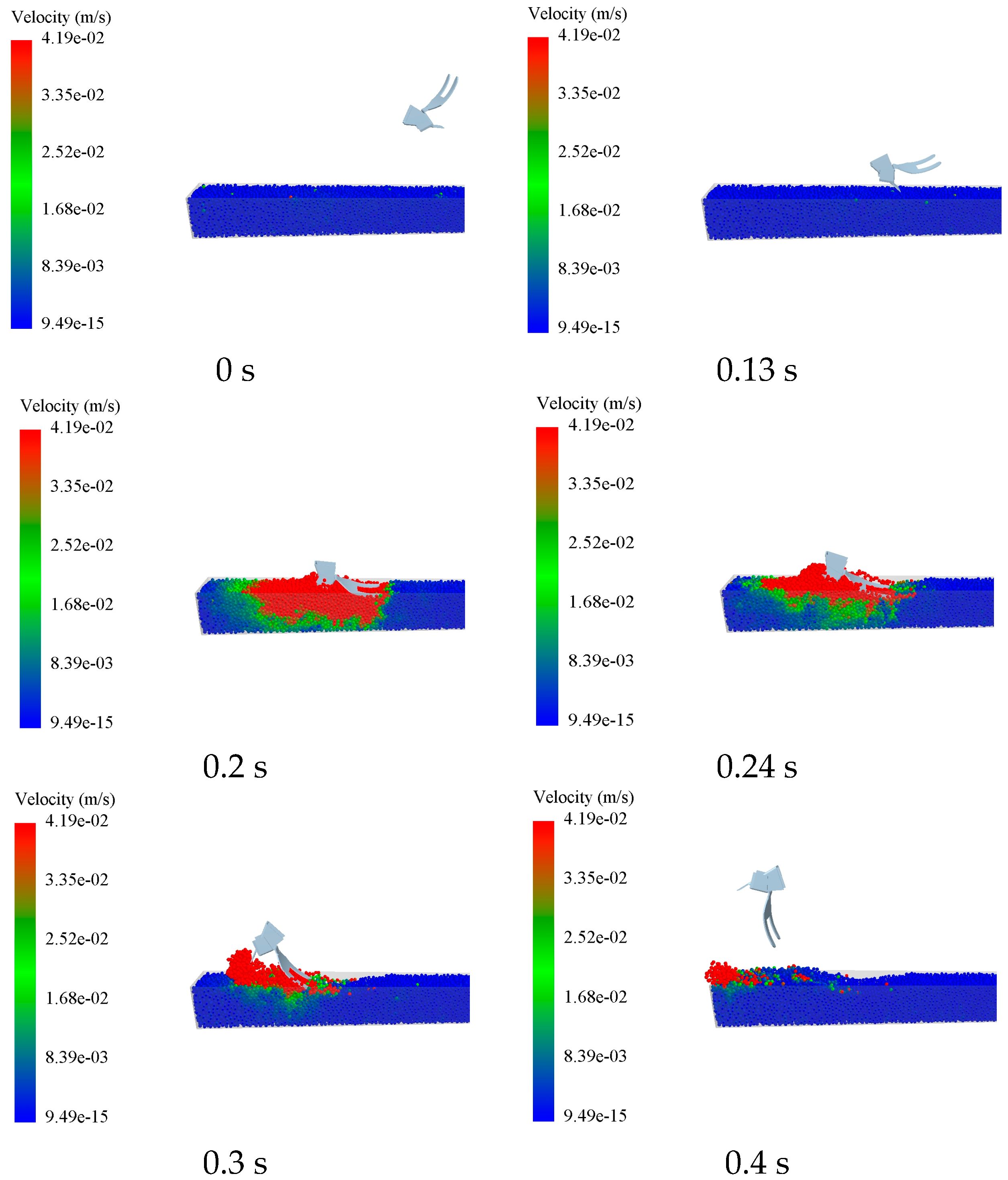
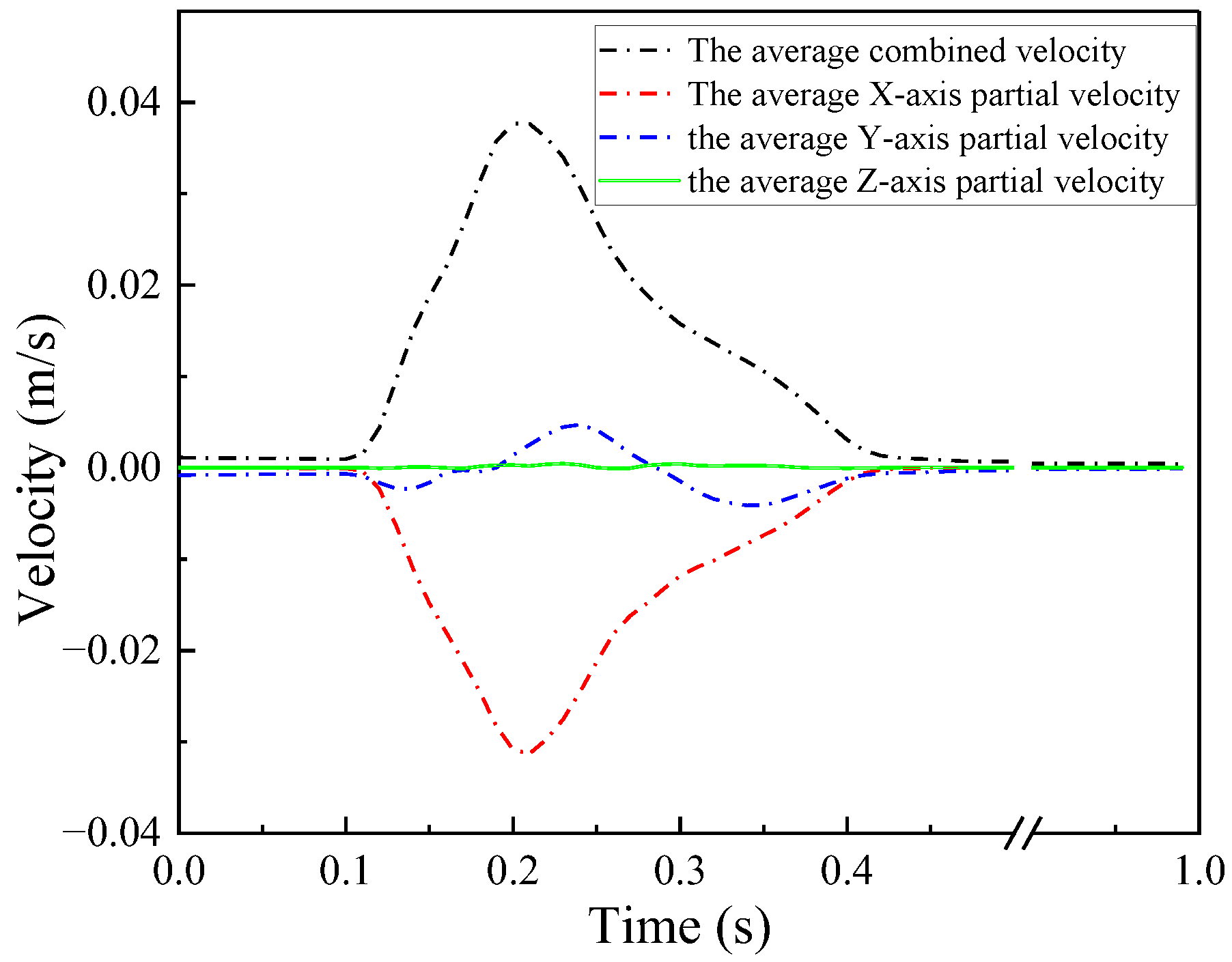
4.1. Soil Disturbance by a Single Duckbill
4.2. Effect of Parameters on Hole-Forming Trajectory
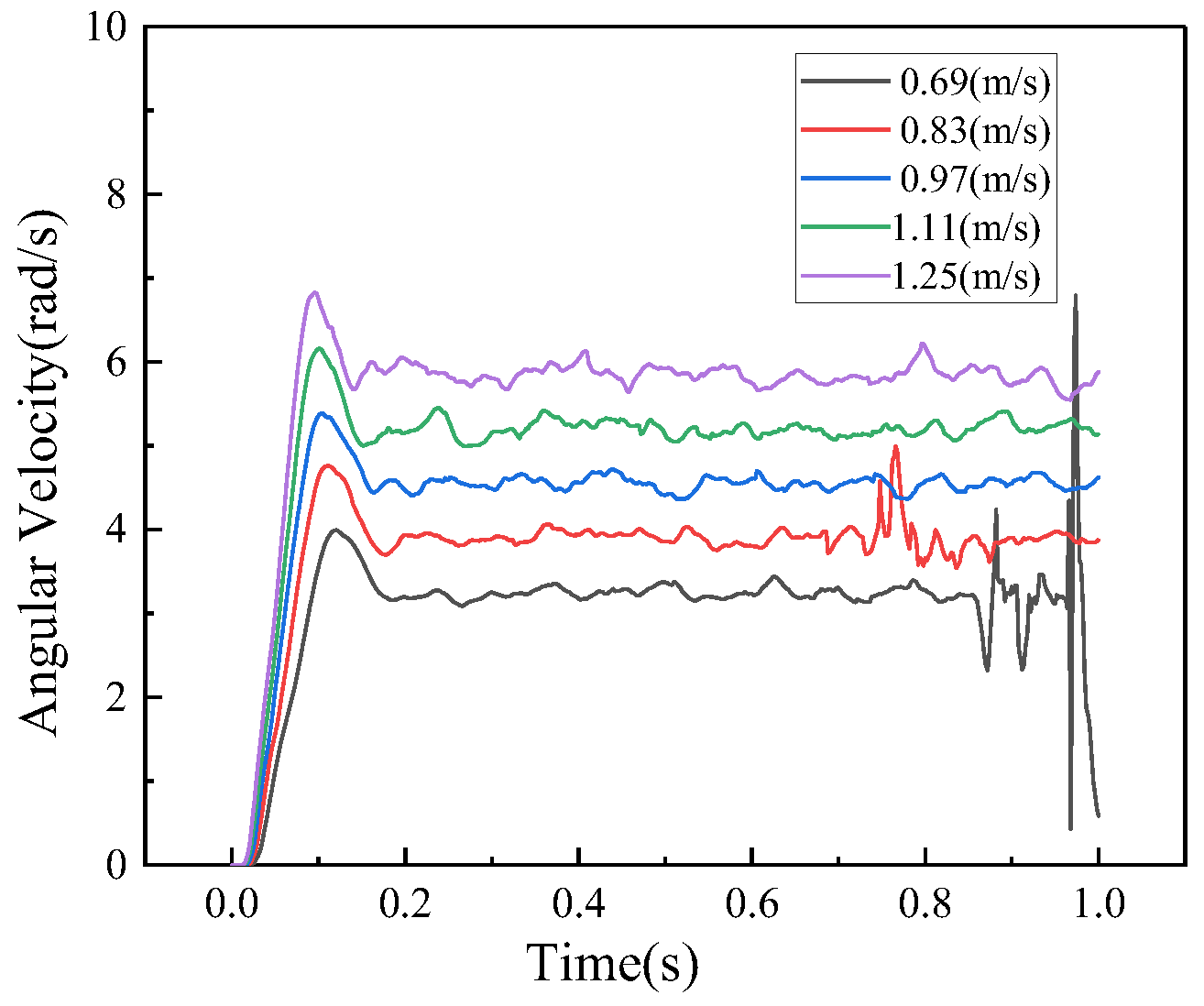
4.2.1. Effect of Forward Speed on Hole-Forming Trajectory
4.2.2. Effect of Traction Angle on Hole-Forming Trajectory
4.2.3. The Effect Mass of the Hole-Forming Device on Hole-Forming Trajectory
5. Simulation Optimization
5.1. Optimization Methods
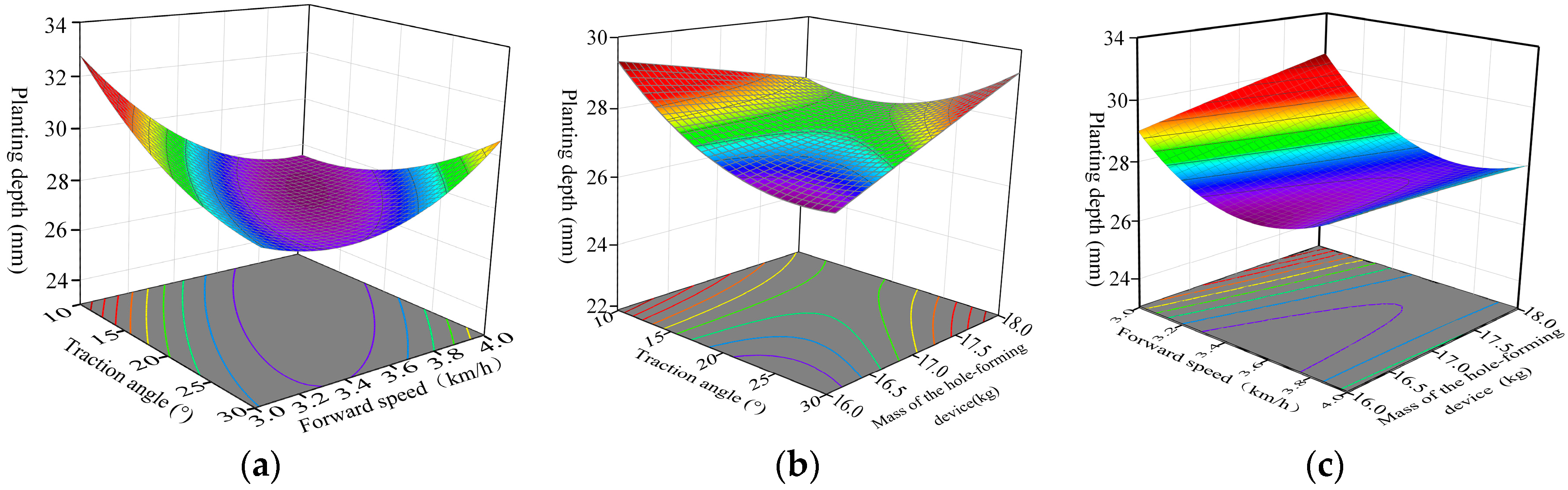
5.2. Analysis of Test Results
5.3. Parameter Optimization
6. Conclusions
- Through the method of DEM-MBD coupled simulation, it is found that the disturbance of the soil in the process of hole formation by a duckbilled hole-forming device is mainly concentrated in the forward direction and vertical direction of the hole-former, and the hole is formed by squeezing and shearing the soil;
- The size of the forward speed of a duckbilled hole-forming device directly affects the hole-forming performance of the hole-forming device, and a forward speed that is too small or too large will result in too large a planting depth and individual spacing, which will not be able to meet the agronomic requirements;
- Through the optimization of the hole-formation performance parameters of the hole-forming device, it is obtained that the hole-formation performance of the hole-forming device is optimal when the traction angle is 17.3°, the forward speed is 1.11 m/s, and the mass of the hole-forming device is 17.9 kg.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Yuan, Y.W.; Bai, S.H.; Niu, K. Research progress in the key technologies and equipment for cotton planting mechanization. Trans. Chin. Soc. Agric. Eng. 2023, 39, 1–11. [Google Scholar]
- Zhao, L.W.; Jin, R.C.; Sun, R.; Cui, R.M.; Ba, Y.H. Application of Agricultural Information Technology in Cotton Cultivation. Agric. Eng. Technol. 2023, 43, 88–89. [Google Scholar]
- Tian, G.R. Cotton mechanical precision sowing technology application points and promotion countermeasures. China South. Agric. Mach. 2024, 55, 62–64. [Google Scholar]
- Wang, H.T.; Sun, W.; Zhang, H.; Liu, X.L.; Li, H.; Liu, K.Y. Development of Mechanized Planting Technology on Film. Agric. Equip. Veh. Eng. 2022, 60, 7–11. [Google Scholar]
- Yan, J.W.; Wei, S.; Zhang, F.G. Present Research Status and Development Trend of Over-Film Precision Seeding Equipment. Xinjiang Agric. Mech. 2021, 2, 15–19. [Google Scholar] [CrossRef]
- Liu, K.Y.; Sun, W.; Zhang, H.; Liu, X.L.; Li, H.; Wang, H.T.; Tian, B. General situation of development of mechanized soil covering technology on film. Agric. Equip. Veh. Eng. 2023, 61, 10–13. [Google Scholar]
- Quan, W.; Wu, M.L.; Luo, H.F.; Chen, C.P.; Xie, W. Soil hole opening methods and parameters optimization of pot seedling transplanting machine for rapeseed. Trans. Chin. Soc. Agric. Eng. 2020, 36, 13–21+327. [Google Scholar]
- Zhou, G.; Shi, L.R.; Zhao, W.Y.; Xin, S.L.; Yang, X.P. Design and simulation of precision seeder for flax indryland ridge with plastic-film. Agric. Res. Arid. Areas 2019, 37, 245–252. [Google Scholar]
- Hou, S.Y.; Ji, Z.C.; Xue, D.H.; Wang, X.; Feng, B.J.; Chen, H.T. Improved Design and Test of Straw Cleaning Device Suitable for No-tillage Seeding Unit. Trans. Chin. Soc. Agric. Mach. 2023, 54, 111–122. [Google Scholar]
- Hou, S.Y.; Wang, S.Z.; Zhu, X.X.; Zhang, J.C.; Ji, W.W.; Chen, H.T. Design and Experiment of Side-open Sliding Cutting Film Broken Seeding Unit Based on Straw Fiber Film. Trans. Chin. Soc. Agric. Mach. 2021, 52, 155–165. [Google Scholar]
- Liao, Q.X.; Pei, L.M.; Zhang, Q.S.; Wang, L.; Luo, Z.C.; Fu, M.L. Design and Experiment of Rolling Film Cutting and Hole Punching Device for Rapeseed Seeder with Film Mulching and Perforating. Trans. Chin. Soc. Agric. Mach. 2023, 54, 85–98. [Google Scholar]
- Bao, Q.Y. Development of a New Bionic Subsoiler Based on DEM. Master’s Thesis, Shandong Agricultural University, Taian, China, 2018. [Google Scholar]
- Kim, Y.-S.; Lee, S.-D.; Baek, S.-Y.; Jeon, H.-H.; Lee, J.-H.; Siddique, A.A.; Kim, Y.-J.; Kim, W.-S.; Sim, T.; Yi, S.; et al. Development of DEM-MBD coupling model for draft force prediction of agricultural tractor with plowing depth. Comput. Electron. Agric. 2022, 202, 107405. [Google Scholar] [CrossRef]
- Hasimu, A.; Chen, Y. Soil disturbance and draft force of selected seed openers. Soil Tillage Res. 2014, 140, 48–54. [Google Scholar] [CrossRef]
- Zhao, H.; Li, H.; Ma, S.; He, J.; Wang, Q.; Lu, C.; Zheng, Z.; Zhang, C. The effect of various edge-curve types of plain-straight blades for strip tillage seeding on torque and soil disturbance using DEM. Soil Tillage Res. 2020, 202, 104674. [Google Scholar] [CrossRef]
- Li, J.W.; Li, X.Y.; Hu, B.; Gu, T.L.; Wang, Z.J.; Wang, H.L. Analysis of the resistance reduction mechanism of potato bionic digging shovels in clay and heavy soil conditions. Comput. Electron. Agric. 2023, 214, 108315. [Google Scholar] [CrossRef]
- Chen, X.G.; Zhao, Y. Development of double-film mulch precision planter for cotton seeding. Trans. Chin. Soc. Agric. Eng. 2010, 26, 106–112. [Google Scholar]
- Chen, X.G.; Wang, M. Study on Key Factors of the Duckbill Punch Roller-type Pneumatic Metering Device. J. Agric. Mech. Res. 2011, 33, 130–133+137. [Google Scholar]
- Huang, Y.H.; Quan, L.Z.; Hu, G.F.; Quan, W.; Shi, F.G. Calibration of Discrete Element Contact Parameters for Various Materials and Soils with Different Moisture Content. J. Agric. Sci. Technol. 2024, 26, 98–109. [Google Scholar]
- Wang, X.; Zhang, S.; Pan, H.; Zheng, Z.; Huang, Y.; Zhu, R. Effect of soil particle size on soil-subsoiler interactions using the discrete element method simulations. Biosyst. Eng. 2019, 182, 138–150. [Google Scholar] [CrossRef]
- Zhou, H.B.; Chen, Y.; Mohammad, A.S. Modelling of soil–seed contact using the Discrete Element Method (DEM). Biosyst. Eng. 2014, 121, 56–66. [Google Scholar] [CrossRef]
- Jia, C.P. A DEM-Based Study on the Mechanism of Cup-Soil Interaction in a High-Speed Transplanting Machine for Cavity Tray Seedlings. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2021. [Google Scholar]
- Wa, L.P.C.; Li, Y.L.; Su, C.; Zhao, H.; Dong, X.Q.; Song, J.N.; Wang, J.C. Simulation of soil tillage characteristics and influence analysis of particle sphere type based on EEPA contact model. J. China Agric. Univ. 2021, 26, 193–206. [Google Scholar]
- Han, W.; Wang, S.Z.; Zhang, Q.; Tian, Y.H. Discrete element parameter calibration of micron sized powder particles based on JKR contact modlel. China Powder Sci. Technol. 2021, 27, 60–69. [Google Scholar]
- Wang, W.D.; Liu, X.W. Soil-water characteristic curves based on the non-contact case of three particles of unequa size. J. Nanchang Univ. (Eng. Technol.) 2023, 45, 38–43+58. [Google Scholar]
- Hang, C.; Gao, X.; Yuan, M.; Huang, Y.; Zhu, R. Discrete element simulations and experiments of soil disturbance as affected by the tine spacing of subsoiler. Biosyst. Eng. 2018, 168, 73–82. [Google Scholar] [CrossRef]
- Wu, P.; Zhang, X.; Zeng, Z.; Chen, Y. DEM simulation of subsoiling for soil disturbance as affected by soil layering and working speed. Smart Agric. Technol. 2024, 7, 100385. [Google Scholar] [CrossRef]
- Sun, J.; Wang, Y.; Ma, Y.; Tong, J.; Zhang, Z. DEM simulation of bionic subsoilers (tillage depth > 40 cm) with drag reduction and lower soil disturbance characteristics. Adv. Eng. Softw. 2018, 119, 30–37. [Google Scholar] [CrossRef]
- Ni, X.D.; Xu, G.J.; Wang, Q.; Peng, X.R.; Wang, J.; Hu, B. Design and Experiment of Pneumatic Cylinder Array Precision Seed-metering Device for Cotton. Trans. Chin. Soc. Agric. Mach. 2017, 48, 58–67. [Google Scholar]
- Lu, B.; Ni, X.; Li, S.; Li, K.; Qi, Q. Simulation and Experimental Study of a Split High-Speed Precision Seeding System. Agriculture 2022, 12, 1037. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Unit | Kinematic Pair |
|---|---|---|
| 1 | Ground, coupling shaft | Translate |
| 2 | End cap assembly, coupling shaft | Fixed |
| 3 | Dividing grid combination, coupling shaft | Revolute |
| 4 | Moving duckbill combination, dividing grid combination | Revolute |
| 5 | Moving duckbill combination, dividing grid combination | Spring |
| Parameter | Value |
|---|---|
| Soil particle density/(kg·m−3) | 1569 |
| Density of steel/(kg·m−3) | 7801 |
| Soil particle radius/mm | 3 |
| Soil Poisson’s ratio | 0.36 |
| Steel Poisson’s ratio | 0.29 |
| Shear modulus of soil/MPa | 1 × 106 |
| Shear modulus of steer/MPa | 8.02 × 1010 |
| Restitution coefficient between soil particles | 0.4 |
| Restitution coefficient of soil and steel | 0.5 |
| Static friction coefficient between soil particles | 0.49 |
| Static friction coefficient between soil and steel | 0.46 |
| Dynamic friction coefficient between soil particles | 0.29 |
| Dynamic friction coefficient between soil and steel | 0.15 |
| Normal contact stiffness coefficient between soil–soil particles/(N/m3) | 1.9 × 105 |
| Tangential contact stiffness coefficient between soil–soil particles/(N/m3) | 1.4 × 105 |
| Critical normal stress between soil and soil particles/Pa | 55,000 |
| Critical tangential stress between soil and soil particles/Pa | 55,000 |
| Bonding radius/mm | 3.5 |
| Number | Simulated Values for Planting Depth | Real Values of Planting Depth | Simulated Values for Individual Spacing | Real Values of Individual Spacing |
|---|---|---|---|---|
| 1 | 27.47 | 27.62 | 89.17 | 89.21 |
| 2 | 27.56 | 26.98 | 88.95 | 88.73 |
| 3 | 27.53 | 27.41 | 89.26 | 89.05 |
| 4 | 27.9 | 27.88 | 88.70 | 89.12 |
| 5 | 27.42 | 27.56 | 89.02 | 88.97 |
| Forward Speed (m/s) | Planting Depth (mm) | Individual Spacing (mm) |
|---|---|---|
| 0.69 | 30.67 | 92.43 |
| 0.83 | 26.78 | 89.73 |
| 0.97 | 29.08 | 89.48 |
| 1.11 | 29.19 | 89.91 |
| 1.25 | 29.32 | 91.01 |
| Traction Angle (°) | Planting Depth (mm) | Individual Spacing (mm) |
|---|---|---|
| 0 | 29.78 | 88.78 |
| 10 | 29.46 | 89.59 |
| 20 | 26.71 | 89.41 |
| 30 | 26.68 | 89.36 |
| 40 | 26.50 | 89.50 |
| Mass of the Hole-Forming Device (kg) | Planting Depth (mm) | Individual Spacing (mm) |
|---|---|---|
| 15 | 27.50 | 89.31 |
| 16 | 28.12 | 89.44 |
| 17 | 28.27 | 90.03 |
| 18 | 28.73 | 89.70 |
| 19 | 29.18 | 89.18 |
| Coding | Experimental Factors | ||
|---|---|---|---|
| Traction Angle X1/(°) | Forward Speed X2/(m/s) | Mass of the Hole-Forming Device X3/(kg) | |
| −1.682 | 3.2 | 0.75 | 15.3 |
| −1 | 10 | 0.83 | 16 |
| 0 | 20 | 0.97 | 17 |
| 1 | 30 | 1.11 | 18 |
| 1.682 | 36.8 | 1.19 | 18.7 |
| Test Serial Number | Experimental Factors | Evaluating Indicator | |||
|---|---|---|---|---|---|
| X1 | X2 | X3 | Planting Depth Y1/% | Individual Spacing Y2/% | |
| 1 | −1 | −1 | −1 | 32.96 | 87.3 |
| 2 | 1 | −1 | −1 | 26.72 | 85.1 |
| 3 | −1 | 1 | −1 | 29.14 | 87.1 |
| 4 | 1 | 1 | −1 | 29.62 | 88.1 |
| 5 | −1 | −1 | 1 | 32.85 | 90.3 |
| 6 | 1 | −1 | 1 | 29.9 | 86.3 |
| 7 | −1 | 1 | 1 | 26.68 | 90.3 |
| 8 | 1 | 1 | 1 | 31.7 | 90.5 |
| 9 | −1.682 | 0 | 0 | 29.96 | 87.5 |
| 10 | 1.682 | 0 | 0 | 29.68 | 85.3 |
| 11 | 0 | −1.682 | 0 | 33.17 | 90.4 |
| 12 | 0 | 1.682 | 0 | 29.9 | 92.5 |
| 13 | 0 | 0 | −1.682 | 26.8 | 83.9 |
| 14 | 0 | 0 | 1.682 | 27.8 | 88.1 |
| 15 | 0 | 0 | 0 | 27.7 | 88.7 |
| 16 | 0 | 0 | 0 | 27.51 | 88.65 |
| 17 | 0 | 0 | 0 | 26.94 | 88.32 |
| 18 | 0 | 0 | 0 | 28.22 | 88.31 |
| 19 | 0 | 0 | 0 | 27.65 | 88.54 |
| 20 | 0 | 0 | 0 | 26.94 | 88.34 |
| 21 | 0 | 0 | 0 | 26.97 | 88.15 |
| 22 | 0 | 0 | 0 | 27.7 | 88.47 |
| 23 | 0 | 0 | 0 | 27.89 | 89.4 |
| Source | Planting Depth | Individual Spacing | ||||||
|---|---|---|---|---|---|---|---|---|
| df | Mean Square | F-Value | p-Value | df | Mean Square | F-Value | p-Value | |
| Model | 9 | 10.46 | 46.74 | 0.0001 ** | 9 | 8.96 | 74.86 | 0.0001 ** |
| X1 | 1 | 1.27 | 5.67 | 0.0333 * | 1 | 5.54 | 46.32 | 0.0001 ** |
| X2 | 1 | 8.52 | 38.10 | 0.0001 ** | 1 | 8.12 | 67.87 | 0.0001 ** |
| X3 | 1 | 1.40 | 6.25 | 0.0265 * | 1 | 20.82 | 174.02 | 0.0001 ** |
| X1X2 | 1 | 26.97 | 120.56 | 0.0001 ** | 1 | 6.85 | 57.20 | 0.0001 ** |
| X1X3 | 1 | 7.66 | 34.25 | 0.0001 ** | 1 | 0.8450 | 7.06 | 0.0197 * |
| X2X3 | 1 | 1.49 | 6.65 | 0.0229 * | 1 | 0.2450 | 2.05 | 0.1761 |
| X12 | 1 | 12.18 | 54.43 | 0.0001 ** | 1 | 8.09 | 67.63 | 0.0001 ** |
| X22 | 1 | 34.89 | 155.94 | 0.0001 ** | 1 | 18.25 | 152.54 | 0.0001 ** |
| X32 | 1 | 0.0038 | 0.0170 | 0.8984 | 1 | 11.62 | 97.09 | 0.0001 ** |
| Residual | 13 | 0.2238 | 13 | 0.1197 | ||||
| Lack of Fit | 5 | 0.2455 | 1.17 | 0.4014 | 5 | 0.0960 | 0.7141 | 0.6303 |
| Pure Error | 8 | 0.2101 | 8 | 0.1344 | ||||
| Cor Total | 22 | 22 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, B.; Ni, X.; Cai, W.; Li, K. The Simulation and Parameter Optimization of the Hole-Forming Process of a Duckbilled Hole-Forming Device. Agriculture 2024, 14, 843. https://doi.org/10.3390/agriculture14060843
Zhao B, Ni X, Cai W, Li K. The Simulation and Parameter Optimization of the Hole-Forming Process of a Duckbilled Hole-Forming Device. Agriculture. 2024; 14(6):843. https://doi.org/10.3390/agriculture14060843
Chicago/Turabian StyleZhao, Binqiang, Xiangdong Ni, Wenqing Cai, and Kezhi Li. 2024. "The Simulation and Parameter Optimization of the Hole-Forming Process of a Duckbilled Hole-Forming Device" Agriculture 14, no. 6: 843. https://doi.org/10.3390/agriculture14060843