
Research on the Control Strategy of the Power Shift System of a Cotton Picker Based on a Fuzzy Algorithm

 ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. PST and Principle Analysis of Cotton Picker
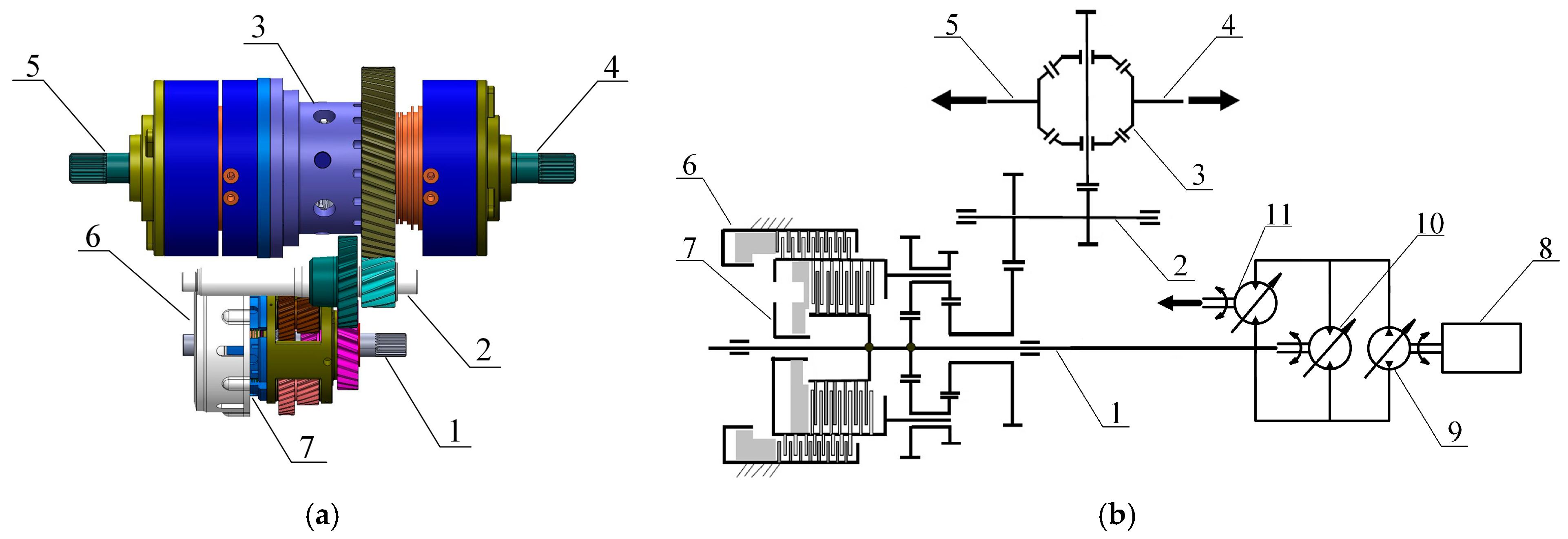
2.1.1. The Working Principle of PST
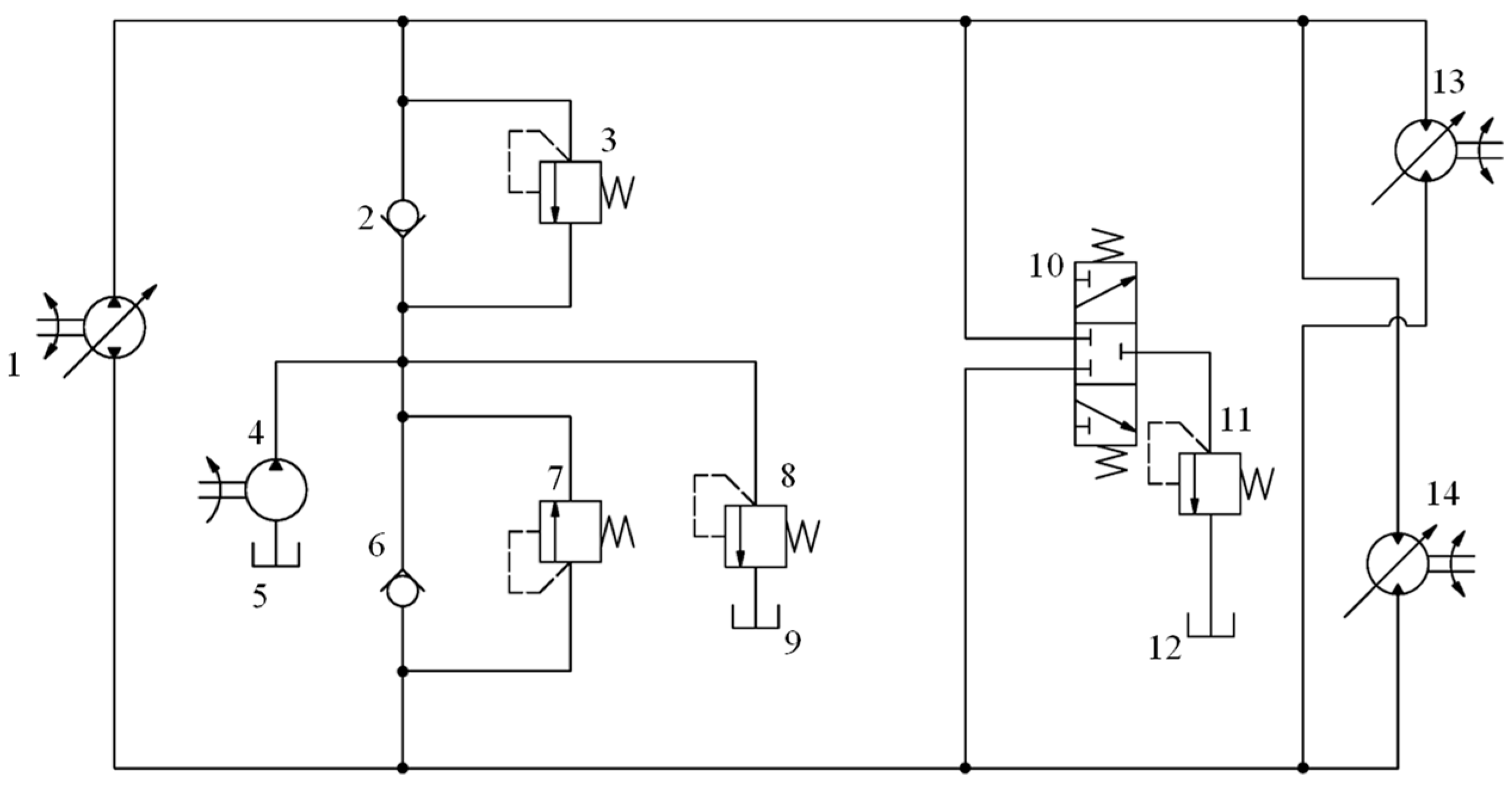
2.1.2. The Working Principle of Hydrostatic Transmission
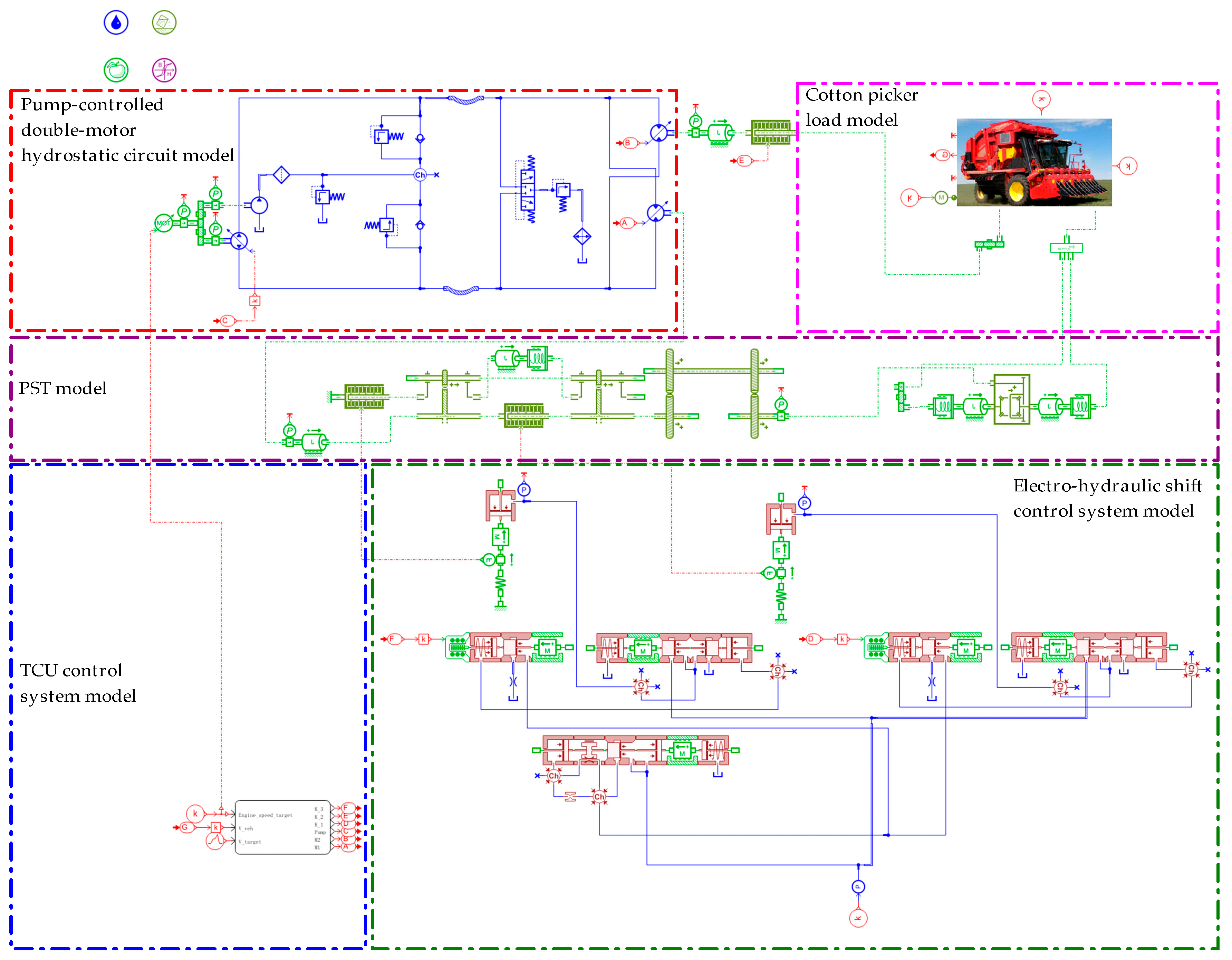
2.2. Simulation of the Power Shift Driving Transmission System of the Cotton Picker
2.2.1. Simulation Parameters of the Whole Vehicle Driving Transmission System of the Cotton Picker
2.2.2. Simulation Analysis of the Cotton Picker’s Picking Pattern
2.2.3. Simulation Analysis of Cotton Picker Transportation Mode
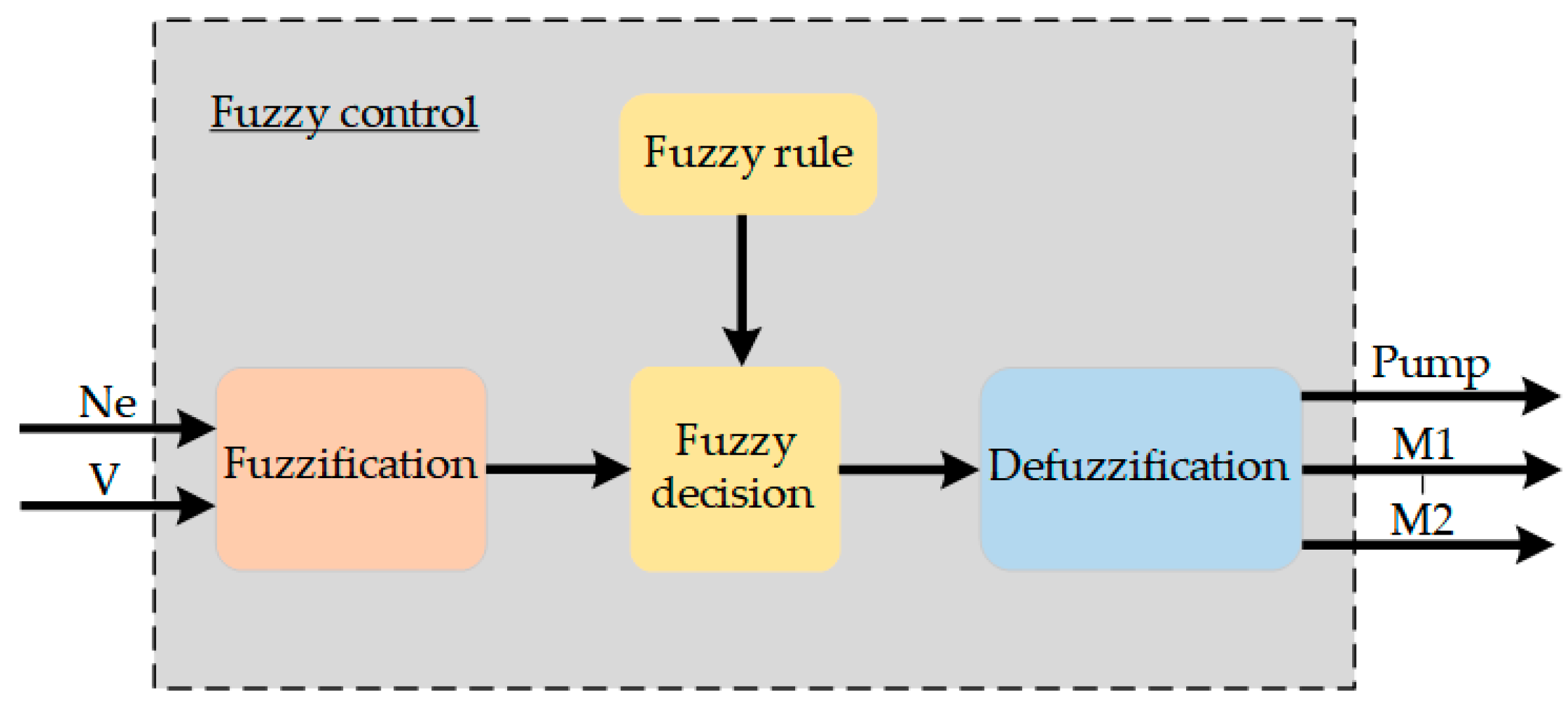
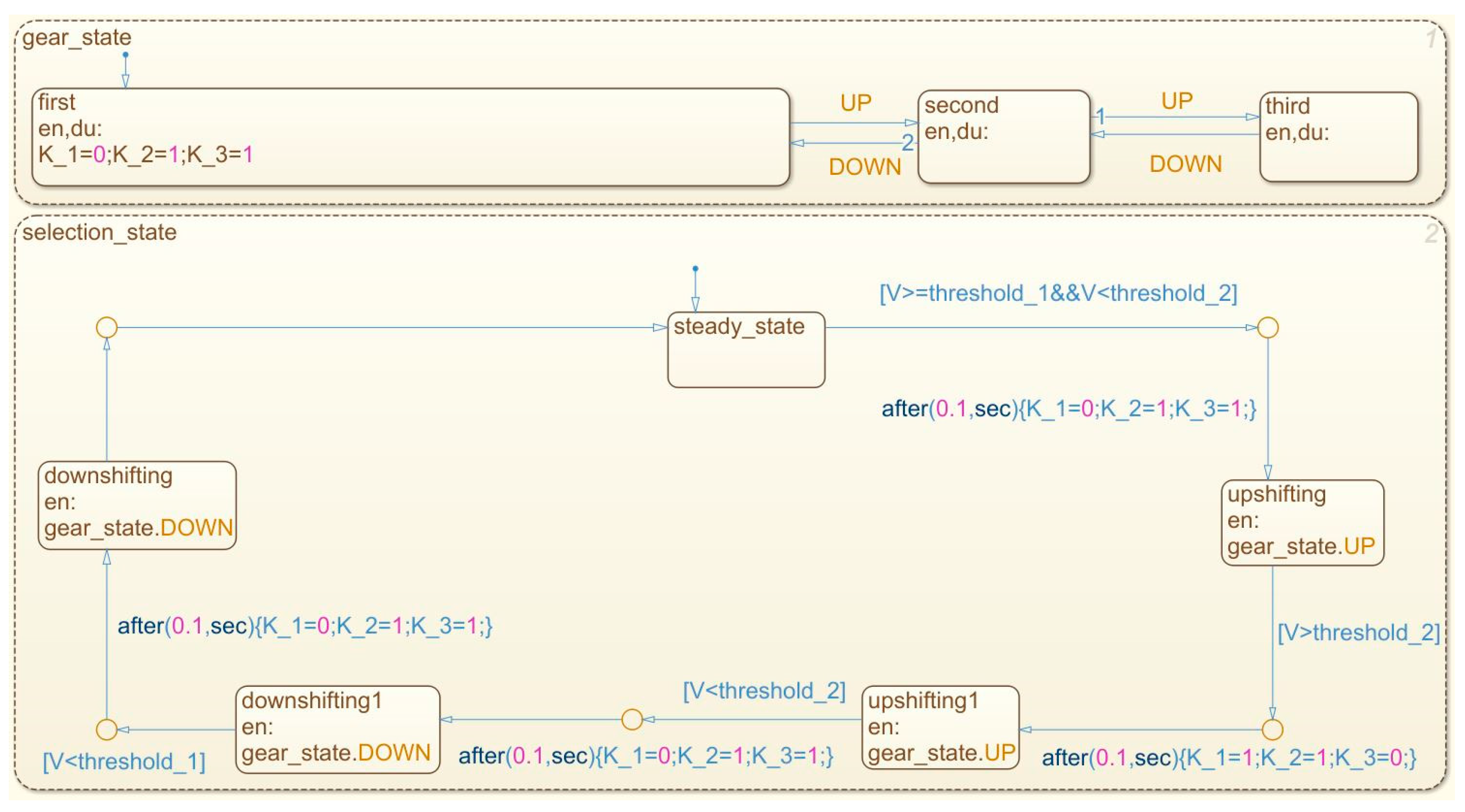
2.3. Fuzzy Shift Control Strategy
2.3.1. Fuzzification
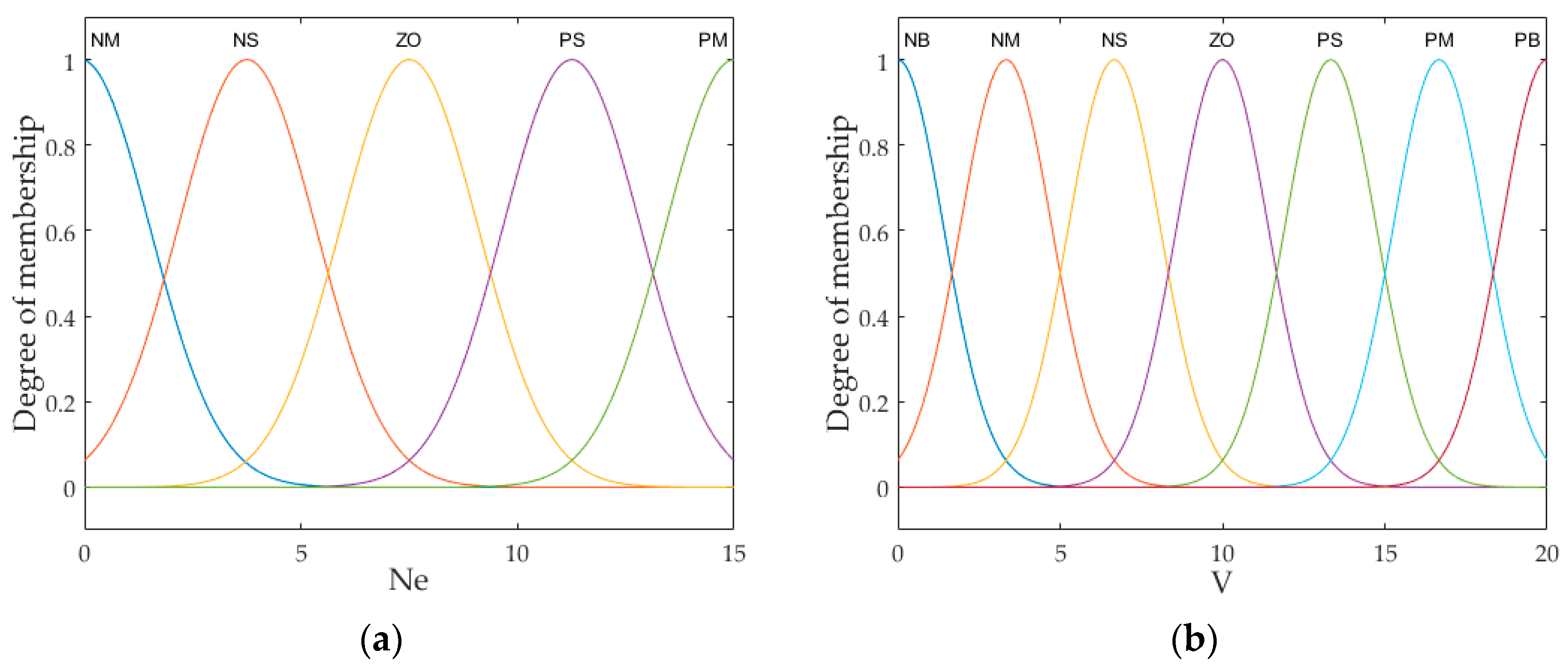
2.3.2. The Definition of the Input and Output Affiliation Functions
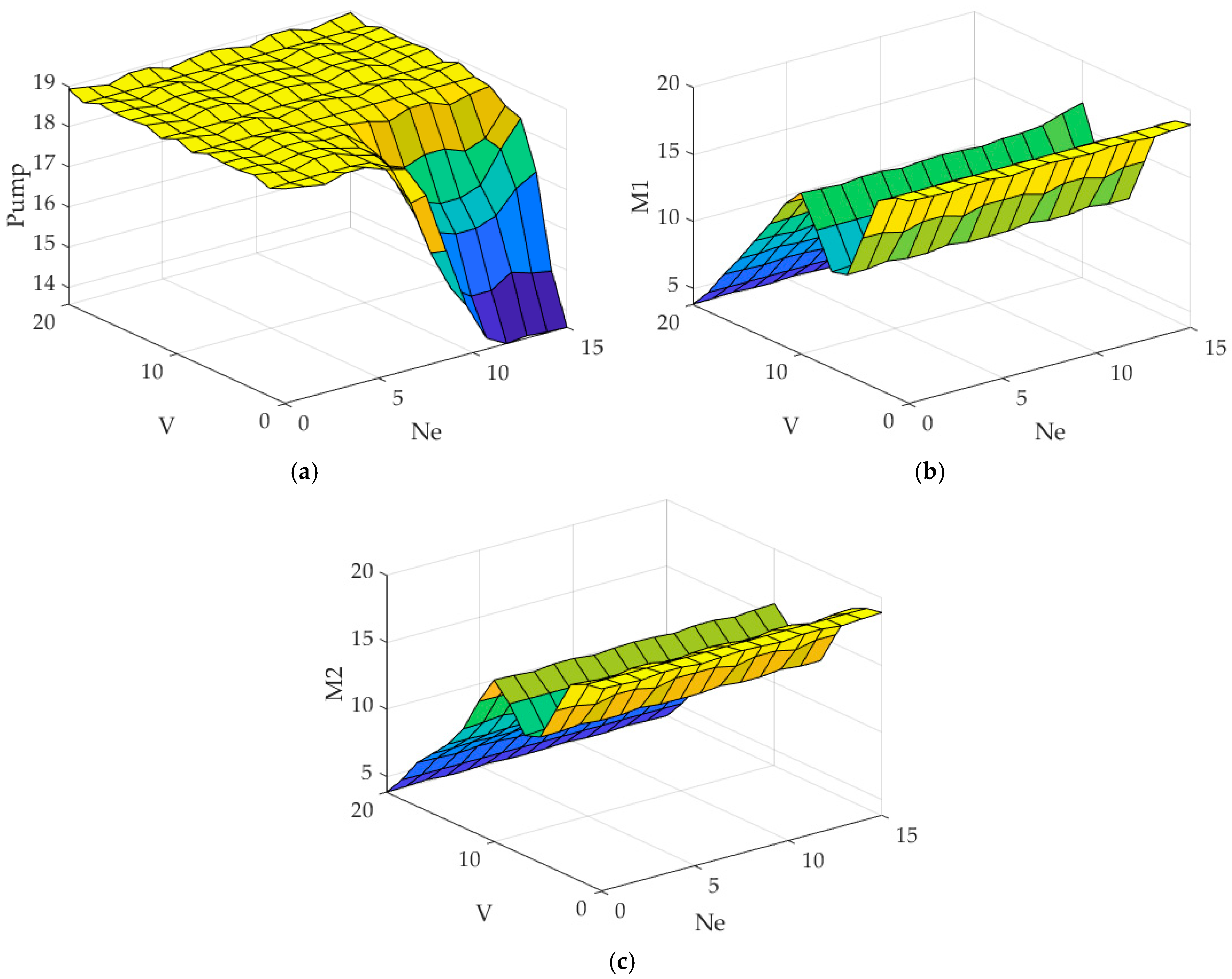
2.3.3. Establishment of Fuzzy Control Rules
2.3.4. Defuzzification
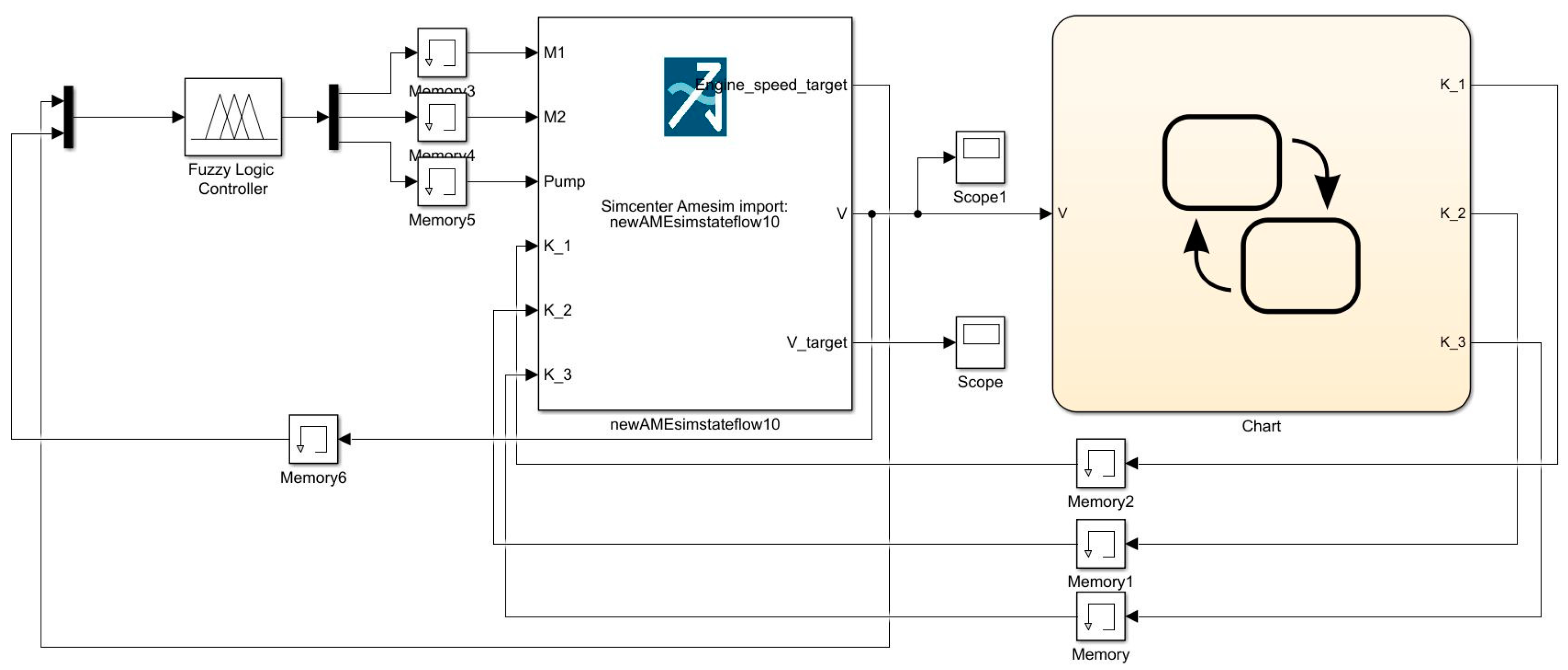
3. Simulation Verification of the Automatic Gear Shift Strategy and Discussion of Results
4. Conclusions
- (1)
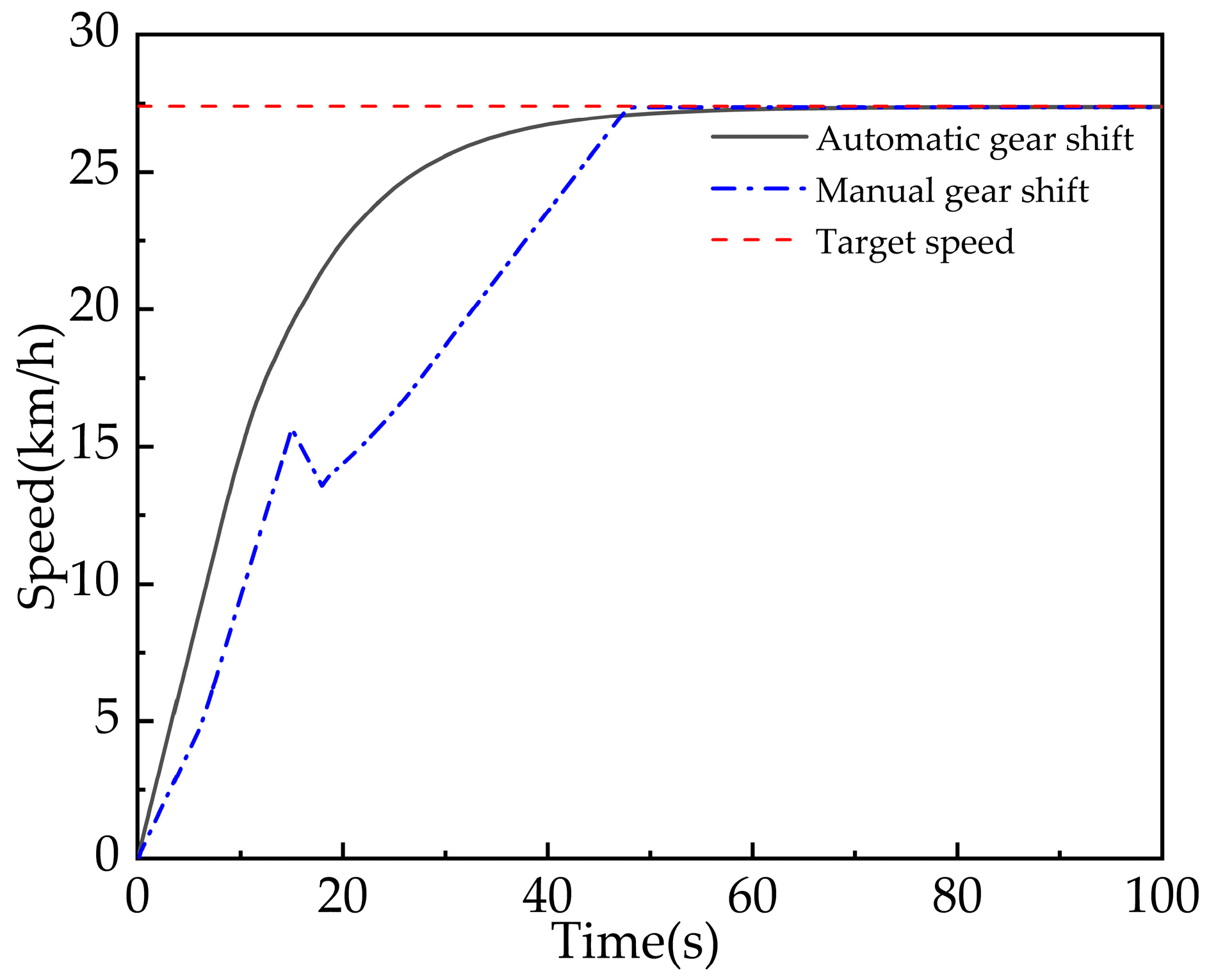
- In order to reduce the speed fluctuation and the jerking in the process of cotton picker shifting, this study firstly analyzed the working principle of the PST and hydrostatic transmission, proposed a fuzzy shifting control strategy, and compared the effects of the fuzzy shifting control strategy and the traditional shifting method on the speed of the cotton picker. When the fuzzy shift control strategy is used, the speed fluctuation and jerking of the cotton picker are significantly reduced.
- (2)
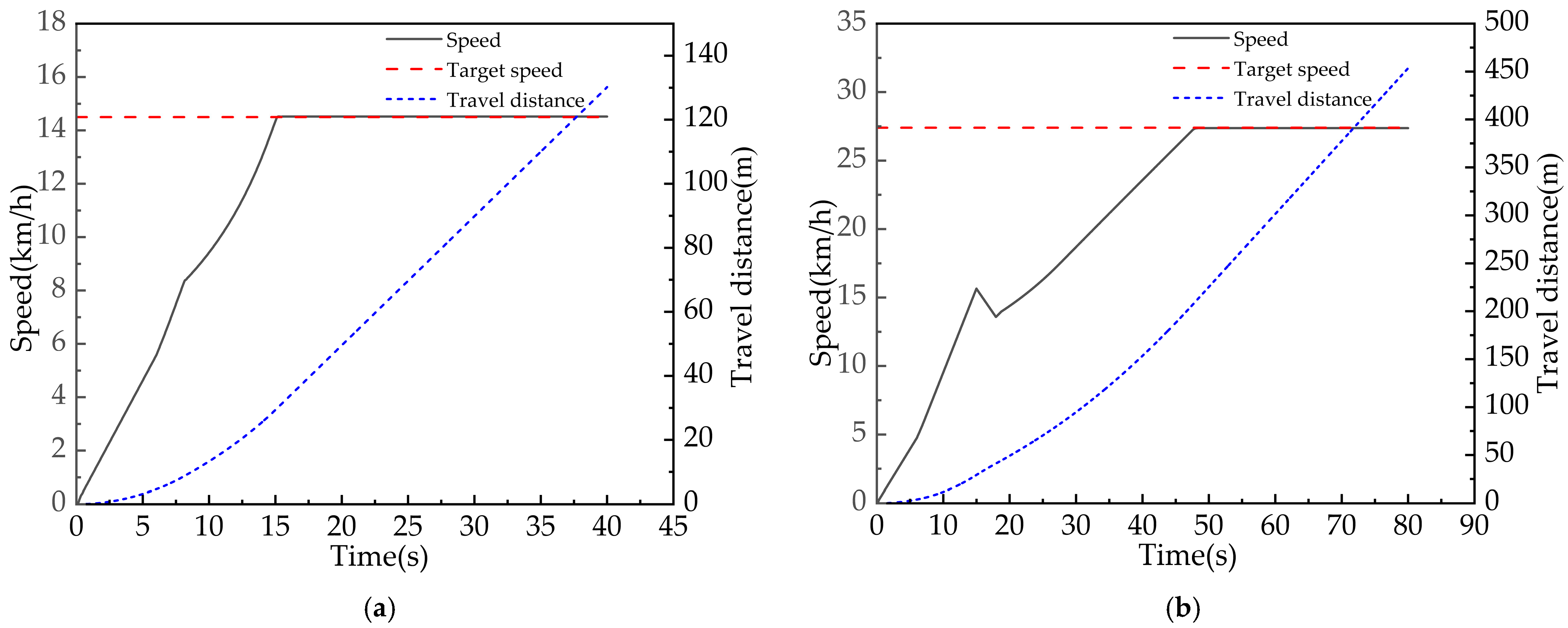
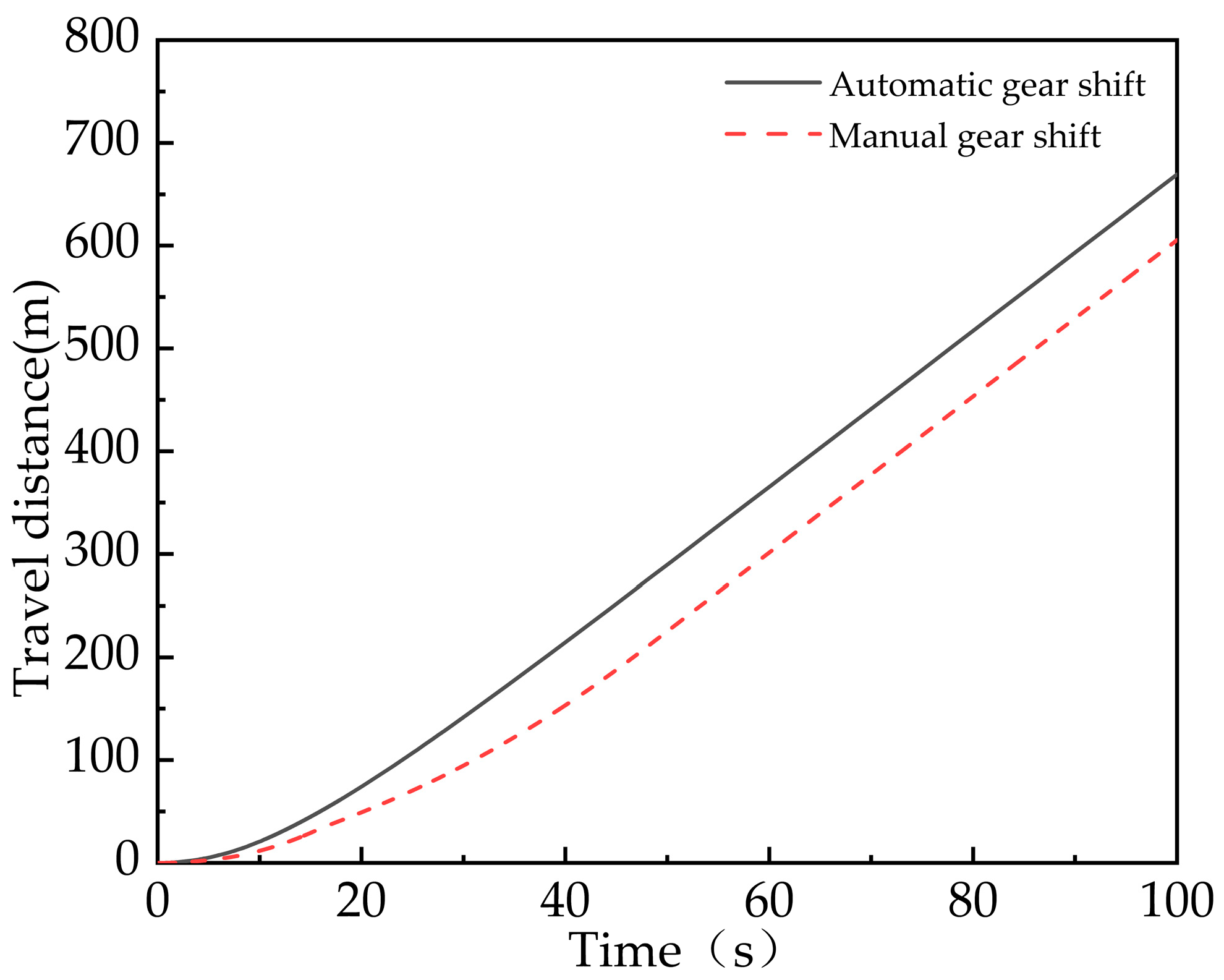
- When the automatic gearshift strategy with fuzzy control theory is adopted, the low-speed brake and high-speed clutch are engaged in a transitional overlapping engagement, which makes the speed curve smoother compared with the direct engagement of the traditional manual gearshift; in the same driving time, the automatic gearshift strategy with the application of fuzzy logic can make the cotton picker travel 64 m more compared to using the traditional manual gearshift.
- (3)
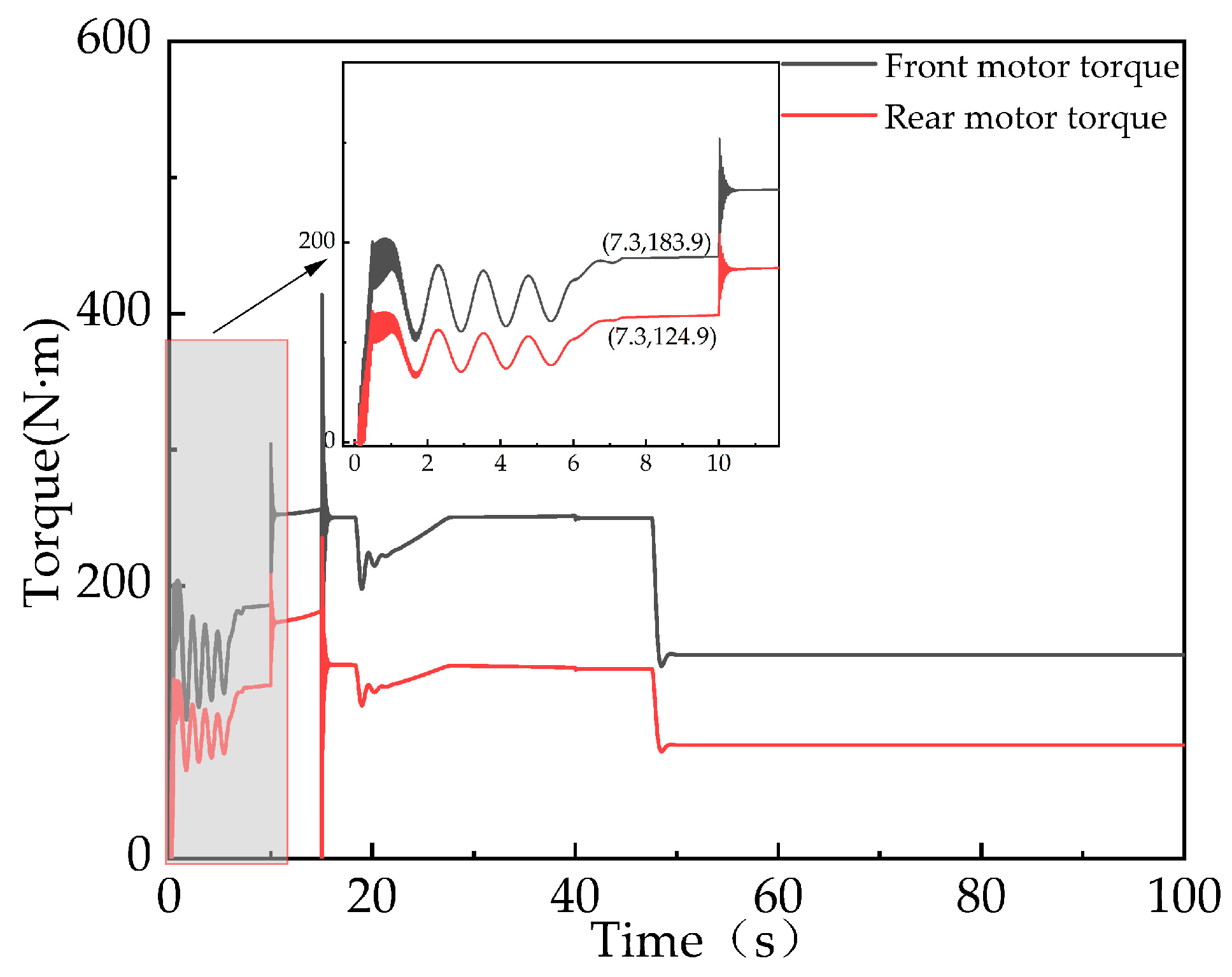
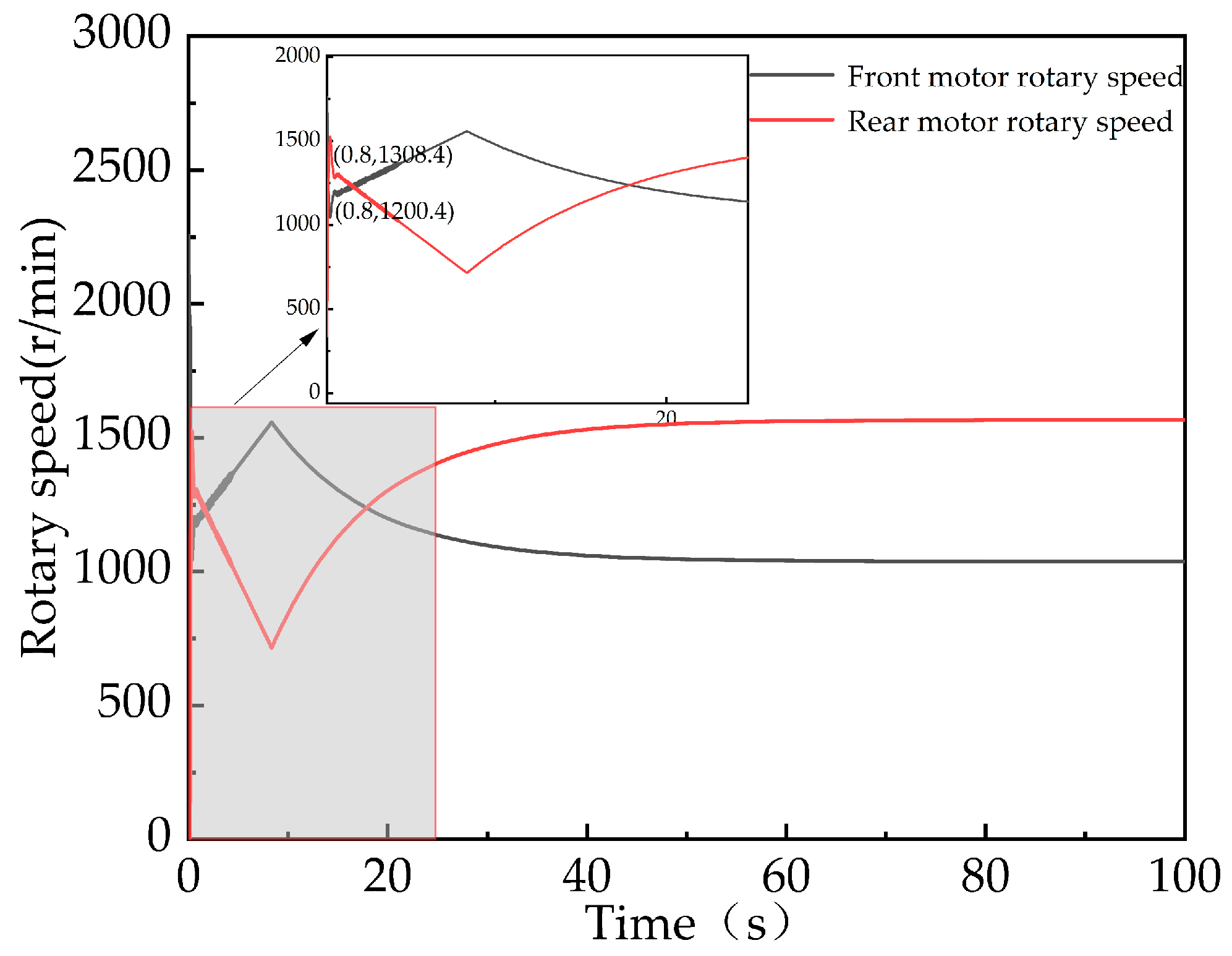
- By analyzing the front and rear variable motor flow, rotary speed, and torque magnitude of the cotton picker under the fuzzy shift control theory, it was found that the front and rear variable motor flow, rotary speed, and torque of the cotton picker fluctuates to a certain extent at the time of startup, but the fluctuation time is very short. By comparing the output torque curves of the front and rear variable motors of the cotton picker in road transportation mode with and without the fuzzy shift control strategy, it was found that the torque fluctuation time of the front and rear motors during the startup phase decreased from 7.3 s to 0.9 s, and the torque fluctuation at the shift points was significantly reduced. This indicates that the fuzzy shift control strategy has good dynamic response performance and stability.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, J.Z.; Zhao, Z.M.; Li, B. Research Status and Development Trend of Tractor Power Shift Transmission Technology. Tract. Farm Transp. 2023, 50, 10–14. [Google Scholar]
- Du, W.; Zhao, S.D.; Gao, J.Z.; Zheng, Z.h. Research Status and Development Trend of Tractor Power Shift Technology. Automob. Appl. Technol. 2020, 3, 216–219. [Google Scholar]
- Xi, Z.Q.; Zhou, Z.L.; Zhang, M.Z.; Cao, Q.M. Shift Characteristics and Control Strategy of Powershift Transmission on Tractor. Trans. Chin. Soc. Agric. Mach. 2016, 47, 350–357. [Google Scholar]
- Cai, S.L.; Chen, Q.H.; Lin, T.L.; Ren, H.L.; Fu, S.J.; Xu, M.K. Power Uninterrupted Shift Strategy of Electric Loader Based on CoordinateddControl of Drive Motor and Wet Clutch. J. Mech. Eng. 2022, 58, 46–56. [Google Scholar]
- Wu, G.; Ma, W.; You, L. Research on Intelligent Shift Control Strategy of The Loader Based on Radial Basis Function Neural Network. J. Phys. Conf. Ser. 2020, 1550, 062003. [Google Scholar] [CrossRef]
- Zhang, L.P.; Zhang, H.X.; Han, Z.Q.; Chen, J.Y.; Liu, J.C. A novel multi-parameter coordinated shift control strategy for an automated manual transmission based on fuzzy inference. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 231, 684–699. [Google Scholar] [CrossRef]
- Zhao, X.; Ni, X.D.; Wang, Q.; Bao, M.X.; Li, S.; Han, S.M. Research on adaptive control strategy of hydraulic mechanical continuously variable transmission of a cotton picker. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 3335–3345. [Google Scholar] [CrossRef]
- Pan, W.L.; Wang, L.; Ni, X.D.; Cai, W.Q.; Zhao, Y.Q.; Chen, H.J.; Lin, Y.G.; Zhou, Y.H. Optimisation of Control Strategies for Power Shift Gearboxes. Agriculture 2023, 13, 1266. [Google Scholar] [CrossRef]
- Li, B.G.; Sun, D.Y.; Hu, M.H.; Zhou, X.Y.; Liu, J.L.; Wang, D.Y. Coordinated Control of Gear Shifting Process with Multiple Clutches for Power-Shift Transmission. Mech. Mach. Theory 2019, 140, 274–291. [Google Scholar] [CrossRef]
- Shi, G.; Dong, P.; Sun, H.Q.; Liu, Y.; Cheng, Y.J.; Xu, X.Y. Adaptive control of the shifting process in automatic transmissions. Int. J. Automot. Technol. 2017, 18, 179–194. [Google Scholar] [CrossRef]
- Jeoung, D.; Min, K.; Sunwoo, M. Automatic Transmission Shift Strategy Based on Greedy Algorithm Using Predicted Velocity. Int. J. Automot. Technol. 2020, 21, 159–168. [Google Scholar] [CrossRef]
- Cao, Q.M.; Zhou, Z.L.; Zhang, M.Z. Fuzzy Adaptive Shift Schedule of Tractor Subjected to Random Load. Math. Probl. Eng. 2017, 2017, 9284281. [Google Scholar] [CrossRef]
- Zhou, Z.L.; Xing, M.X.; Xu, L.Y.; Ding, J.Q.; Zhao, Y.K. Simulation Analysis of Tractor AMT Shifting Process Based on Fuzzy Optimization of Downshifting. Adv. Mater. Res. 2012, 1670, 970–975. [Google Scholar] [CrossRef]
- Zhao, K.G.; Chang, H.; Hu, Y.L.; Yao, W.H. Study on Uninterrupted Shift Transmission Shift Strategy Based on Fuzzy Control. Adv. Mater. Res. 2013, 2649, 668–671. [Google Scholar] [CrossRef]
- Ning, M.; Hou, B.J.; Wang, Y.X.; Ren, K.; Chen, S.X.; Wang, P.; Lin, R.F. Research on Optimal Shift Control Strategy of Two-speed AMT based on Fuzzy Control. J. Phys. Conf. Ser. 2020, 1575, 012116. [Google Scholar]
- Sun, D.Y.; Chen, X.D.; Li, B.G.; Yang, B. Dynamic control method of tractor powershift process based on genetic algorithm. J. Chongqing Univ. 2019, 42, 1–14. [Google Scholar]
- Song, Q.; Ye, S.D.; Li, W.C.; Gao, P.; Li, Y.T.; Huang, Y.S. Research on AMT Overall Shift Schedule for Pure Electric Vehicles Based on NSGA-II Algorithm. Chin. J. Automot. Eng. 2017, 7, 44–51. [Google Scholar]
- Zhang, Y.A.; Du, Y.F.; Meng, Q.F.; Li, X.Y.; Liu, L.; Zhu, Z.X. Model-free adaptive control of tractor wet clutch pressure based on improved genetic algorithm. J. Jilin Univ. Eng. Technol. Ed. 2023, accepted. [Google Scholar]
- Gao, Z.Y.; Du, M.G.; Li, S.L.; Li, J. Design of Shifting Rules of Automatic Transmission Based on Genetic Algorithm Optimization and Fuzzy Control Dynamic Optimization. Acta Armamentarii 2021, 42, 684–696. [Google Scholar]
- Wu, S.J.; Zhu, E.Y.; Zhang, P.Z.; She, J.J. Experimental study on fuzzy intelligent shifting control of vehicle using genetic Algorithm. Mach. Des. Manuf. 2009, 6, 34–36. [Google Scholar]
- Gao, Z.Y.; Du, M.G.; Li, S.L. Design and Optimization of Dynamic Shift Law for Hyclraulic Automatic Transmission. Veh. Power Technol. 2019, 1, 23–28. [Google Scholar]
- Wu, S.J.; Zhu, E.Y.; Li, Q.L.; Xie, J.; Peng, X. Study on intelligent shift control strategy of automobile based on genetic-fuzzy algorithm. In Proceedings of the 2008 3rd International Conference on Innovative Computing Information and Control, Dalian, China, 18–20 June 2008; p. 402. [Google Scholar]
- Wang, L.; Liu, X.H.; Wang, X.; Chen, J.S.; Liang, Y.J. Shifting strategy of digital hydraulic transmission system for wheel loader. J. Jilin Univ. Eng. Technol. Ed. 2017, 47, 819–826. [Google Scholar]
- Chu, Y.M.; Wu, H.C.; Zhao, L.M.; Cao, G. Heavy Hydraulic Automatic Transmission of Shift Research Based on Fuzzy Theory. Comput. Simul. 2019, 36, 137–143. [Google Scholar]
- Zhou, J.F.; Zheng, D.C.; Gao, R.; Leng, W. Calculation method of fuzzy reliability in combination of fuzzy variables and random variables. Eng. Mech. 2021, 38, 12–23. [Google Scholar]
- Bouzidi, M.; Harrouz, A.; Mansouri, S. Control and automation of Asynchronous motor using Fuzzy logic. SRM 2019, 1, 154–171. [Google Scholar] [CrossRef]
- Wu, Y.W.; Yan, X.H.; Zhou, Z.L. Architecture Modeling and Test of Tractor Power Shift Transmission. IEEE Access 2021, 9, 3517–3525. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Working State | Brake | Clutch |
|---|---|---|
| Neutral gear | separation | separation |
| Low-speed gear | engagement | separation |
| High-speed gear | separation | engagement |
| Locked | engagement | engagement |
| Main Parameters | Value | Main Parameters | Value |
|---|---|---|---|
| Cotton picker vehicle mass (kg) | 33,000 | Maximum displacement of the rear drive motor (mL/r) | 105 |
| Front tire parameters | 520/85R42 | PST gear ratio | 2.38 |
| Rear tire parameters | 620/75R34 | Picking first gear (km/h) | 0~7.1 |
| Engine rated speed (r/min) | 1900 | Picking second gear (km/h) | 0~8.5 |
| Maximum displacement of traveling variable pump (mL/r) | 210 | Field transportation (km/h) | 0~14.5 |
| Maximum displacement of the front drive motor (mL/r) | 165 | Road transportation (km/h) | 0~27.4 |
| Pump | V | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| Ne | NM | PB | PB | PB | PB | PB | PB | PB |
| NS | PB | PB | PB | PB | PB | PB | PB | |
| ZO | PB | PB | PB | PB | PB | PB | PB | |
| PS | PS | PM | PB | PB | PB | PB | PB | |
| PM | PS | PB | PB | PB | PB | PB | PB | |
| M1 | V | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| Ne | NM | PB | PB | ZO | PM | PS | NS | NM |
| NS | PB | PB | ZO | PM | PS | NS | NM | |
| ZO | PB | PB | ZO | PM | PS | NS | NM | |
| PS | PB | PB | ZO | PM | PS | NS | NM | |
| PM | PB | PB | ZO | PM | PS | NS | NM | |
| M2 | V | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| Ne | NM | PB | PB | PS | PM | ZO | NS | NM |
| NS | PB | PB | PS | PM | ZO | NS | NM | |
| ZO | PB | PB | PS | PM | ZO | NS | NM | |
| PS | PB | PB | PS | PM | ZO | NS | NM | |
| PM | PB | PB | PS | PM | ZO | NS | NM | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, X.; Ni, X.; Chen, H.; Pan, W.; Zhao, Y.; Zhai, B.; Cai, W. Research on the Control Strategy of the Power Shift System of a Cotton Picker Based on a Fuzzy Algorithm. Agriculture 2024, 14, 874. https://doi.org/10.3390/agriculture14060874
Meng X, Ni X, Chen H, Pan W, Zhao Y, Zhai B, Cai W. Research on the Control Strategy of the Power Shift System of a Cotton Picker Based on a Fuzzy Algorithm. Agriculture. 2024; 14(6):874. https://doi.org/10.3390/agriculture14060874
Chicago/Turabian StyleMeng, Xiangchao, Xiangdong Ni, Huajun Chen, Wenlong Pan, Yongqiang Zhao, Baoyu Zhai, and Wenqing Cai. 2024. "Research on the Control Strategy of the Power Shift System of a Cotton Picker Based on a Fuzzy Algorithm" Agriculture 14, no. 6: 874. https://doi.org/10.3390/agriculture14060874
APA StyleMeng, X., Ni, X., Chen, H., Pan, W., Zhao, Y., Zhai, B., & Cai, W. (2024). Research on the Control Strategy of the Power Shift System of a Cotton Picker Based on a Fuzzy Algorithm. Agriculture, 14(6), 874. https://doi.org/10.3390/agriculture14060874