
Research and Experiment on Cruise Control of a Self-Propelled Electric Sprayer Chassis

 and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Test Platform Construction
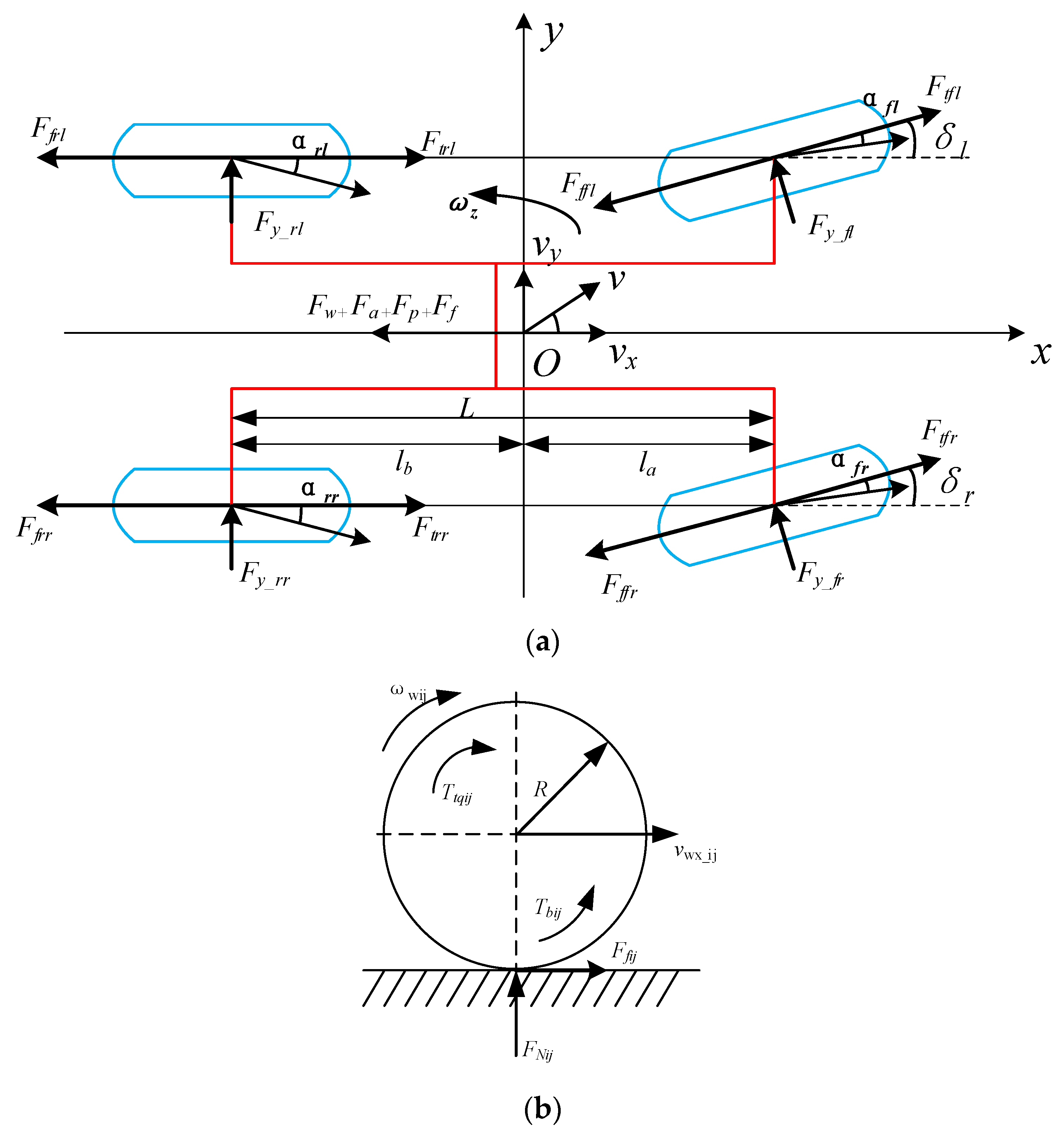
2.2. Analysis of the Overall Cruise Control Model Architecture
- (1)
- The deformation of the tires and the ground are neglected.
- (2)
- The entire body of the sprayer is symmetrical from left to right.
- (3)
- The tires are in a pure rolling state without side slip or slip, and the tire–road adhesion is ideal.
2.3. Modeling of Cruise Control Dynamics
2.3.1. Modeling of Inverse Longitudinal Dynamical Systems
2.3.2. Four-Wheel Torque Distribution Strategy
2.3.3. Modeling of Motor Systems
2.3.4. Chassis Dynamics Modeling
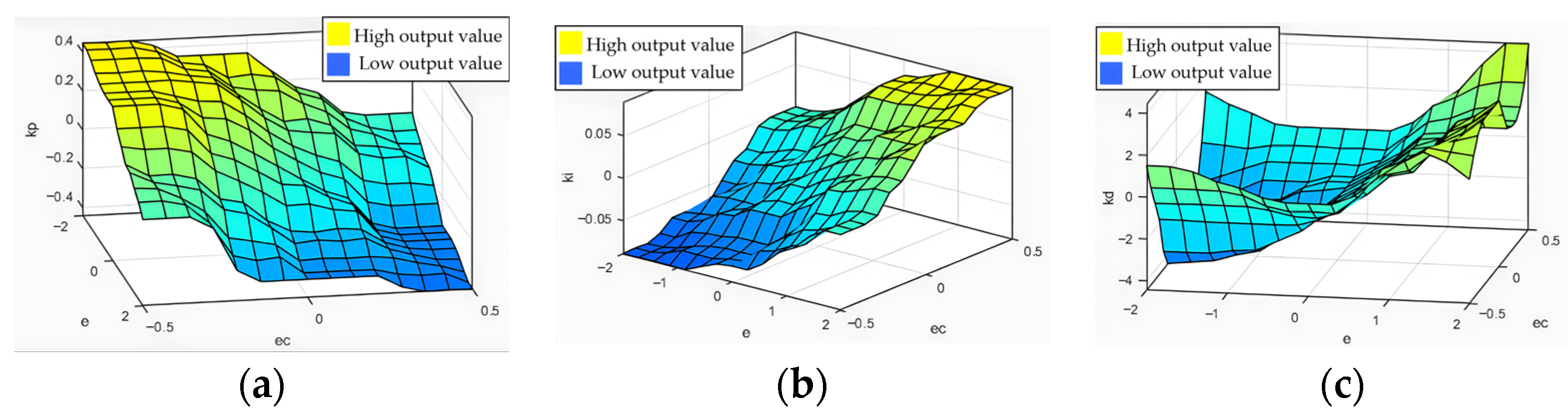
2.4. Design of Constant Speed Cruise Control Method Based on Fuzzy PID
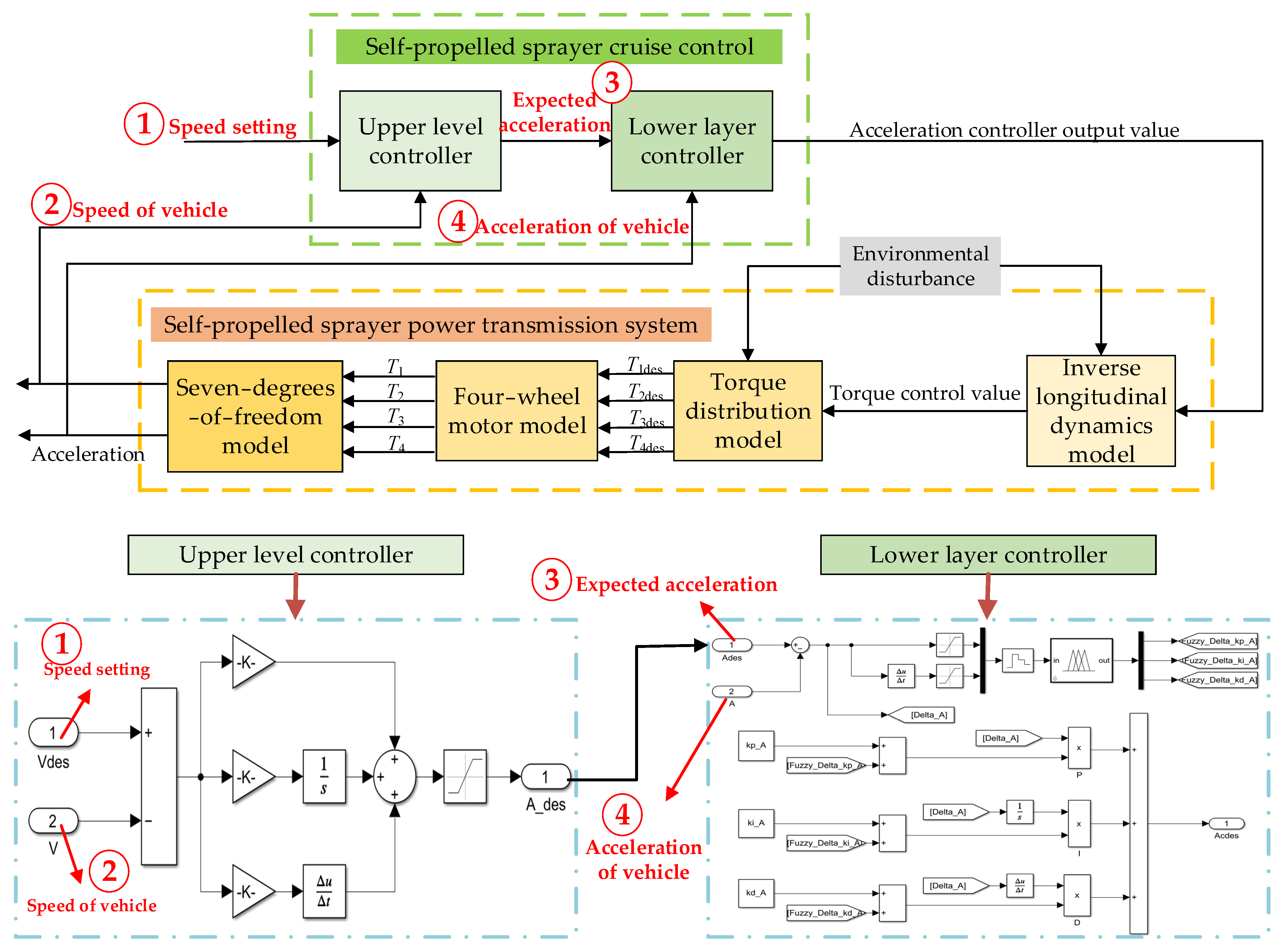
2.4.1. General Architecture of Cruise Control System for Self-Propelled Sprayers
2.4.2. Upper and Lower Level Controller Design
3. Analysis of Simulation and Field Test Results
3.1. Analysis of Simulation Test Results
3.1.1. Four-Wheel Torque Distribution Strategy Validation
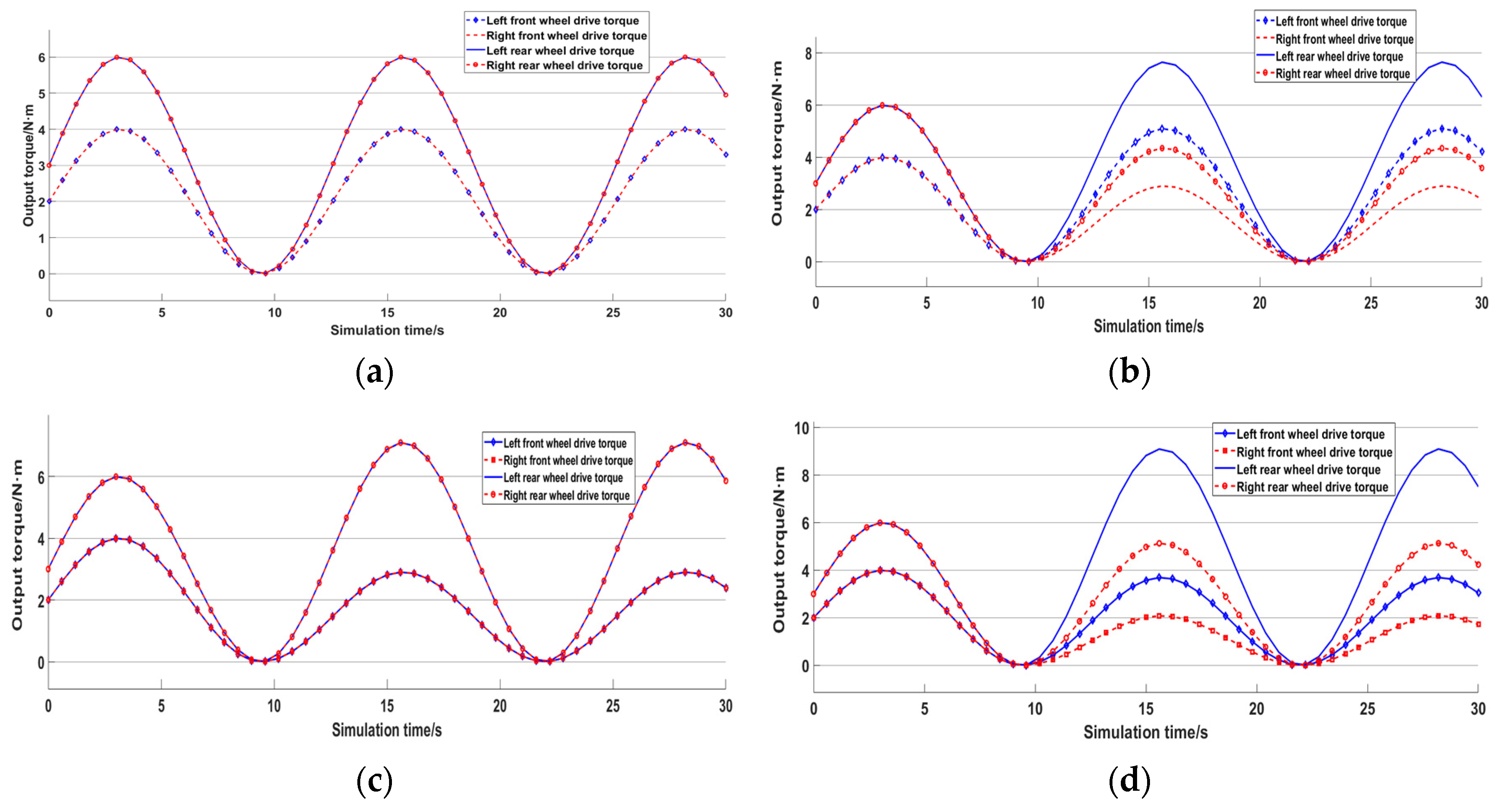
- (1)
- In Scenario 1, as the sprayer operates on a level road, using the sprayer’s center of gravity position as the optimal torque distribution reference, it is determined from the established mathematical model that the center of gravity is located in the rear half of the sprayer, with equal mass on both sides. Consequently, the torque applied to the two rear wheels is equal and slightly greater than that applied to the front wheels.
- (2)
- In Scenario 2, during the first 10 s, the torque distribution is similar to Scenario 1. After 10 s, when the sprayer ascends the slope, with the left two wheels of the sprayer positioned lower due to the center of gravity being towards the rear, the left rear wheel should have the highest driving torque.
- (3)
- In Scenario 3, the torque distribution during the first 10 s aligns with Scenario 1. After 10 s, when the sprayer climbs the slope, the torque applied to the two rear wheels is equal, as is the torque applied to the two front wheels, with the rear wheel torque exceeding that of the front wheels.
- (4)
- In Scenario 4, the torque distribution during the first 10 s is consistent with Scenario 1. After 10 s, when the sprayer ascends the slope with a 10° pitch angle and lateral tilt, the left rear wheel has the highest driving torque.
3.1.2. Cruise Control Function Verification
- (1)
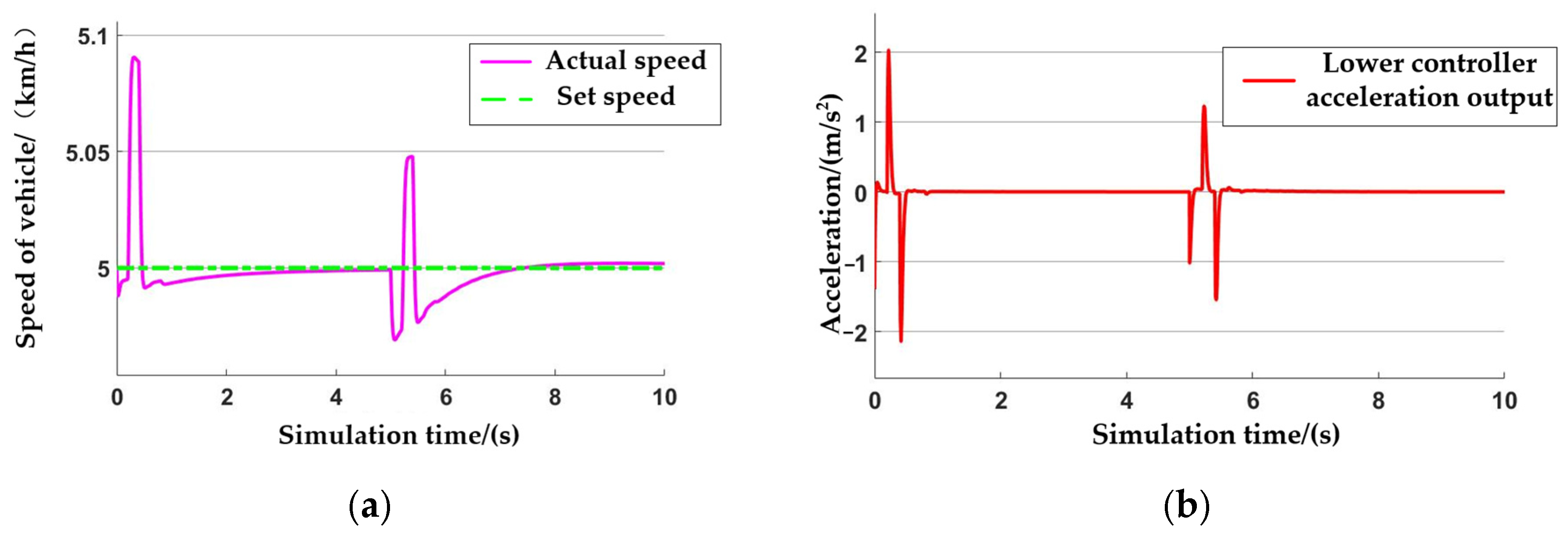
- The effectiveness of the set speed cruise control during the sprayer’s transition and transport was validated. The following typical scenario was simulated: the sprayer travels on a level road with an initial speed of 5 km/h and zero initial acceleration, maintaining a constant weight. To test the robustness of the control system, an external disturbance in the form of a slope change was introduced between 5 and 10 s, causing the body of the sprayer to pitch at a 10° angle. The simulation results for speed and acceleration are illustrated in Figure 12a,b.
- (2)
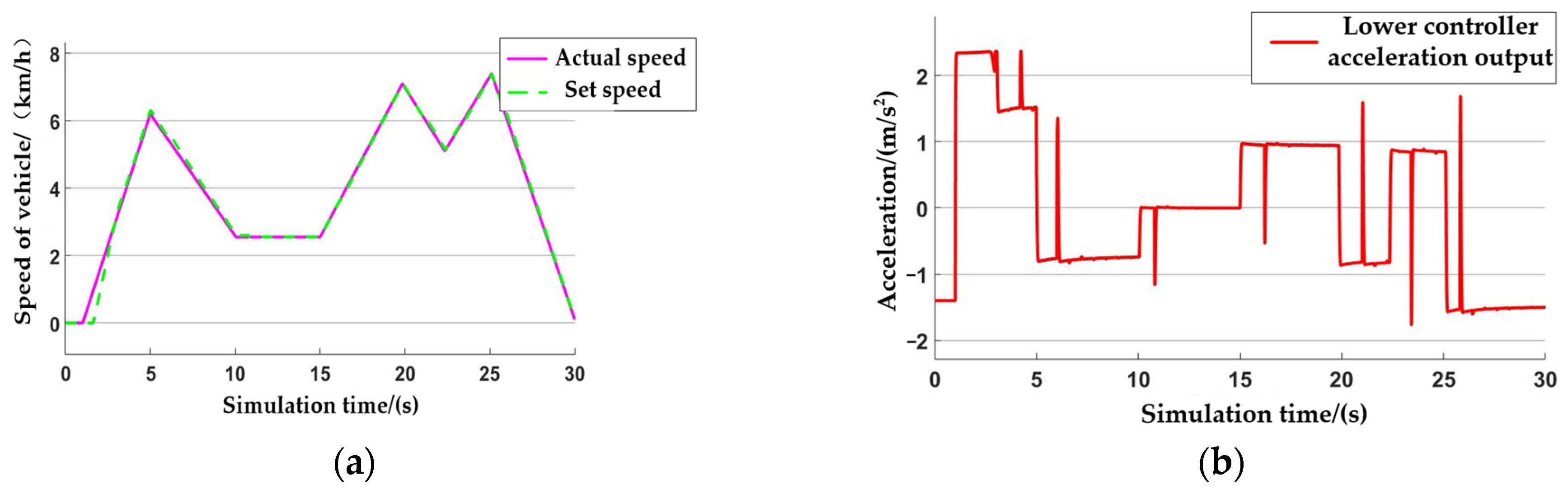
- The cruise control performance during spraying operations was validated under the following typical scenario: the sprayer starts from rest in the field and periodically adjusts the set desired speed. Additionally, as the spraying operation progresses, the sprayer’s weight gradually decreases. Starting from 15 s until the end of the simulation, a 10° pitch disturbance was introduced. The simulation results for speed and acceleration are shown in Figure 13a,b.
3.2. Analysis of Field Vehicle Test Results
3.2.1. Transit Transportation Test
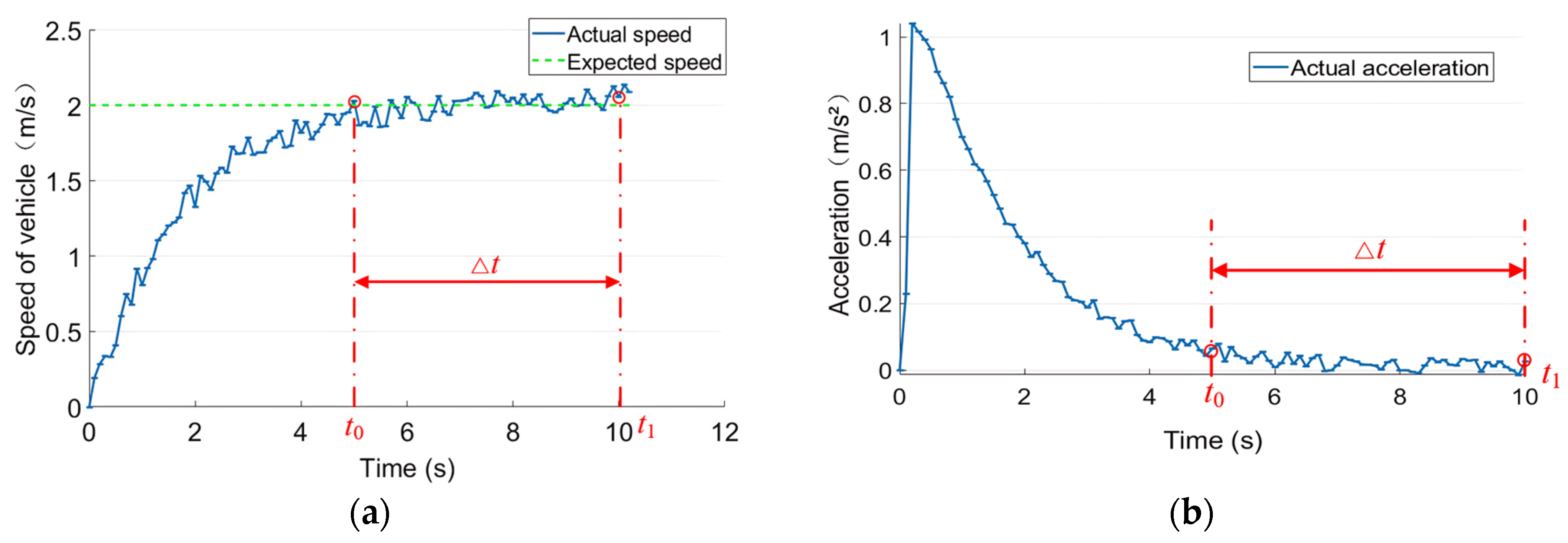
Horizontal Straight-Line Acceleration
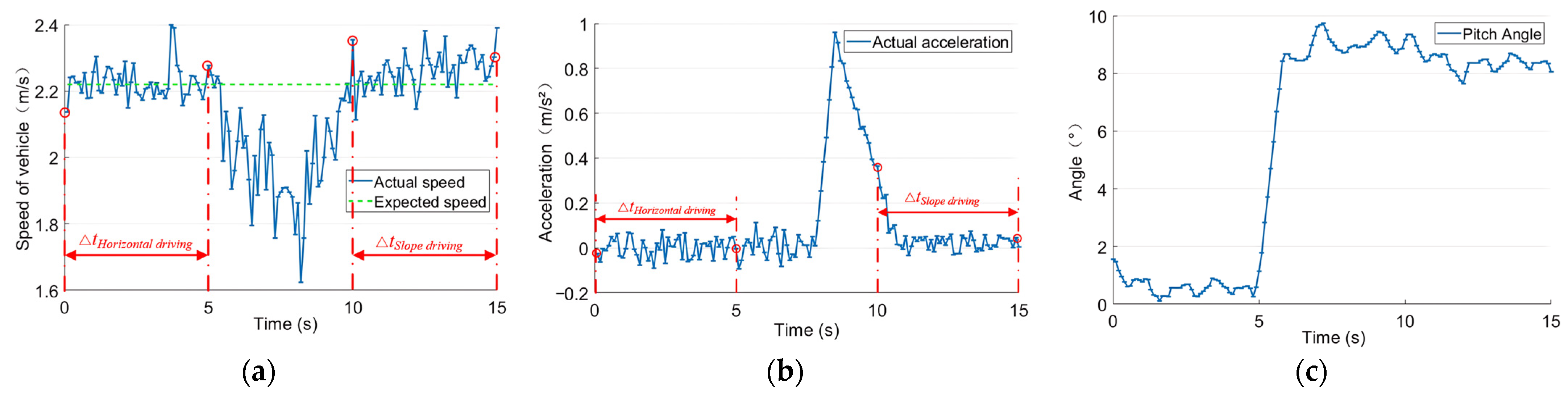
Straight-Line Uphill Driving
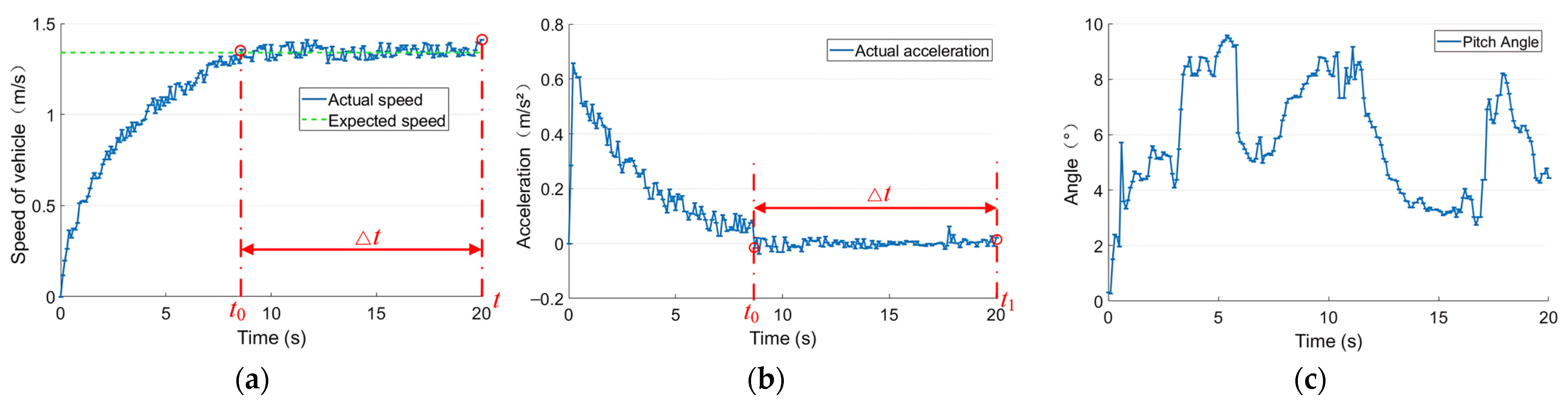
3.2.2. Fieldwork Trials
4. Discussion
- (1)
- Establishment of a dynamic model for slope driving conditions based on an analysis of the sprayer’s longitudinal dynamic characteristics.
- (2)
- Implementation of simulation experiments under external disturbances and variations in vehicle weight using a hierarchical control structure with upper-layer PID and lower-layer fuzzy PID control. Results indicate rapid speed adjustment response times of less than 0.1 s, with an overshoot of only 1.6%. The control system demonstrates effective speed tracking capabilities across various simulated scenarios.
- (3)
- Evaluation of the stability of the sprayer’s cruise control function through on-road tests using a sensor-equipped test platform. Results show minimal speed deviation and effective maintenance of stable speed during straight-line acceleration and uphill driving scenarios.
- (1)
- Considering the slip of each wheel during sprayer operation, incorporating slip rate control to enhance the precision of torque control.
- (2)
- Building upon the existing research, introducing advanced control techniques such as adaptive control, sliding mode control, or other more complex nonlinear control methods to more accurately capture the system’s nonlinear characteristics, thereby designing more efficient and reliable control strategies.
5. Conclusions
- (1)
- Based on the analysis of the longitudinal dynamic characteristics of a self-propelled electric sprayer on sloped terrain, a simplified model of the sprayer’s dynamic system was established by combining relevant vehicle data under the assumption of simplification.
- (2)
- Simulation experiments were conducted using a hierarchical control structure based on upper-level PID control and lower-level fuzzy PID control, considering external disturbances and variations in vehicle weight. The results showed that the system had a very short response time for speed adjustment, less than 0.1 s, with an overshoot of only 1.6%. In the simulation experiments involving simultaneous variations in vehicle weight and slope, the control system exhibited a response time of less than 0.2 s, with minimal overshoot and steady-state errors. These three sets of simulation experiments verified the rationality of the torque distribution algorithm and the effectiveness of the cruise control algorithm in tracking the vehicle speed.
- (3)
- An experimental platform for the entire vehicle chassis was built on the actual vehicle to evaluate the stability of the cruise control function of the sprayer by collecting acceleration and velocity data using sensors. During the horizontal straight-line acceleration phase in transportation transition, the measured maximum deviation in speed was 0.15 m/s, with a maximum deviation rate of 7.5%. The acceleration remained close to zero during the cruise control phase, with a root mean square value of 0.06. During the straight-line uphill travel phase in transportation transition, the root mean square velocity values during stable travel (horizontal and uphill phases) were 2.24 m/s and 2.28 m/s, respectively, with deviation rates from the desired values of 0.9% and 2.7%. During field operations, the root mean square velocity of the sprayer was 1.35 m/s, with a deviation rate from the desired speed of 2.8%. The experimental results further validated the correctness of the model construction and the rationality and accuracy of the experiments, providing strong support for the cruise control of the sprayer.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, H.; Han, J.; Yan, X. Path Navigation Control Method of Tractor Rotary Cultivator Group Based on Lateral Force Limitation. J. Agric. Mech. Res. 2024, 46, 32–37. [Google Scholar]
- Wu, C.; Wu, S.; Wen, L.; Chen, Z.; Yang, W. Variable curvature path tracking control for the automatic navigation of tractors. Trans. Chin. Soc. Agric. 2022, 38, 1–7. [Google Scholar]
- Wang, S.; Li, Q.; Zhu, H. Design of simulation test platform for autonomous navigation of orchard vehicles. J. Chin. Agric. Mech. 2024, 45, 132–140. [Google Scholar]
- Wan, X.; Wang, H.; Cong, P.; Xiao, Y.; Zhao, R.; Chen, X.; Liu, J. Study on localization algorithm of monocular vision navigation for orchard spraying robot. J. Agric. Sci. 2023, 51, 202–209. [Google Scholar]
- Jiang, C.; Zhang, L.; Gu, H. Design and Test of Positioning System of Agricultural Harvester Based on Information Age. J.Agric. Mech. Res. 2021, 43, 195–198. [Google Scholar]
- Li, Z.; Liu, X.; Chen, X.; Gao, Y.; Yang, S. Tractor Integrated Navigation and Positioning System Based on Data Fusion. Trans. Chin. Soc. Agric. 2020, 51, 382–390+399. [Google Scholar]
- Han, K.; Zhu, Z.; Mao, E.; Song, Z.; Xie, B.; Li, M. Joint Control Method of Speed and Heading of Navigation Tractor Based on Optimal Control. Trans. Chin. Soc. Agric. 2013, 44, 165–170. [Google Scholar]
- Wang, Z.; Liu, Z.; Bai, X.; Gao, L. Longitudinal Acceleration Tracking Control of Tractor Cruise System. Trans. Chin. Soc. Agric. 2018, 49, 21–28. [Google Scholar]
- Zhao, C.; Wei, C.; Fu, W.; Shang, Y.; Zhang, G.; Cong, Y. Design and Experiment of Cruise Control System for Hydrostatic Transmission Tractor. Trans. Chin. Soc. Agric. 2021, 52, 359–365. [Google Scholar]
- Xie, L.; Luo, Y.; Li, S.; Li, K. Coordinated Control for Adaptive Cruise Control System of Distributed Drive Electric Vehicles. Automot. Eng. 2018, 40, 652–658+665. [Google Scholar]
- Zhang, G.; Wang, Y.; Wang, F.; Meng, Y. Research on Stability of Adaptive Cruise Based on DDEV. Mach. Build. Autom. 2023, 52, 190–193+221. [Google Scholar]
- Zhang, L.; Liu, M.; Liu, Z.; Xie, L. Joint Simulation of Vehicle Adaptive Cruise Hierarchical Control System. Mach. Des. Manuf. 2022, 69–72+77. [Google Scholar] [CrossRef]
- Dong, S.; Yuan, Z.; Gu, C.; Yang, F. Research on intelligent agricultural machinery control platform based on multi-discipline technology integration. Trans. Chin. Soc. Agric. 2017, 33, 1–11. [Google Scholar]
- Han, S.; He, Y.; Fang, H. Recent development in automatic guidance and autonomous vehicle for agriculture: A Review. J. Zhejiang Univ. (Agric. Life Sci.) 2018, 44, 381–391+515. [Google Scholar]
- Coen, T.; Saeys, W.; Missotten, B.; De, B.J. Cruise control on a combine harvester using model-based predictive control. Biosyst. Eng. 2008, 99, 47–55. [Google Scholar] [CrossRef]
- Kayacan, E.; Ramon, H.; Ramon, H. Towards agrobots: Trajectory control of an autonomous tractor using type-2 fuzzylogic controllers. IEEE-ASME T Mech. 2015, 20, 287–298. [Google Scholar] [CrossRef]
- Miao, Z.; Li, C.; Han, K.; Hao, F.; Han, Z.; Zeng, L. Optimal Control Algorithm and Experiment of Working Speed of Cotton-picking Machine Based on Fuzzy PID. Trans. Chin. Soc. Agric. 2015, 46, 9–14+27. [Google Scholar]
- He, J.; Zhu, J.; Zhang, Z.; Luo, X.; Gang, Y.; Hu, L. Design and Experiment of Automatic Operation System for Rice Transplanter. Trans. Chin. Soc. Agric. 2019, 50, 17–24. [Google Scholar]
- Shen, Y.; He, S.; Liu, H.; Cui, Y. Modeling and control of self-steering electric chassis structure of high clearance sprayer. Trans. Chin. Soc. Agric. Mach. 2020, 51, 385–392, 402. [Google Scholar]
- Wang, Z.; Lv, G.; Zhu, X. Research on the measurement method of vehicle driving resistance. Automob. Appl. Technol. 2019, 67–69. [Google Scholar]
- Song, Q.; Wang, G.; Shang, H.; Zhang, N. Research on Handling Stability Control Strategy for Distributed Drive Electric Vehicle Based on Multi-parameter Control. Automot. Eng. 2023, 45, 2104–2112+2138. [Google Scholar]
- Li, Z.; Pan, S.; Xu, Y. Review on Cooperative Control of Chassis Stability for Distributed Electric Vehicles. Automob. Technol. 2022, 9, 1–14. [Google Scholar]
- Qi, L.; Lv, X.; Wang, L. Analysis and simulationon force distribution ratio of AWD vehicle. Mach. Des. Manuf. 2011, 181–183. [Google Scholar]
- Sangeetha, E.; Subashini, N.; Santhosh, T. Validation of EKF based SoC estimation using vehicle dynamic modelling for range prediction. Electr. Power Syst. Res. 2024, 226, 109905. [Google Scholar]
- Sun, B.; Gu, T.; Wang, P.; Zhang, T.; Shubin, W. Optimization Design of Powertrain Parameters for Electromechanical Flywheel Hybrid Electric Vehicle. IAENG Int. J. Appl. Math. 2022, 14, 11017. [Google Scholar]
- Li, R.; Deng, S.; Hu, Y. Autonomous Vehicle Modeling and Velocity Control Based on Decomposed Fuzzy PID. Int. J. Fuzzy Syst. 2022, 24, 2354–2362. [Google Scholar] [CrossRef]
- Sun, W.; Rong, J.; Wang, J.; Zhang, W.; Zhou, Z. Research on Optimal Torque Control of Turning Energy Consumption for EVs with Motorized Wheels. Energies 2021, 14, 6947. [Google Scholar] [CrossRef]
- Hu, F.; Chen, L.; Hu, D.; Chen, W. 4WD Car Performance Study Based on Electronic Stability and Torque Distribution Coordinated Control. J. Mech. Eng. 2017, 53, 147–157. [Google Scholar] [CrossRef]
- Schreiber, M.; Kutzbach, H.D. Influence of soil and tire parameters on traction. Res. Agric. Eng. 2008, 54, 43–49. [Google Scholar] [CrossRef]
- Roth, J.; Darr, M. Data acquisition system for soil-tire interface stress measurement. Comput. Electron. Agric. 2011, 78, 162–166. [Google Scholar] [CrossRef]
- Fan, B.; Hui, K.; Zhang, B.; Lu, D. Analysis of Tire Cornering Stiffness Property under Slight Driving or Braking Condition. J. Appl. Biomater. Biom. 2012, 271–272, 767–772. [Google Scholar]
- Zhang, K.; Zhang, Y.; Xu, P. An Algorithm for Parameter Identification of Semi-Empirical Tire Model. SAE Int. J. Veh. Dyn. Stab. NVH 2021, 5, 379–396. [Google Scholar] [CrossRef]
- Du, H.; Gao, Z.; Liu, Z. Research status and development trend of automobile tire model. Tire Ind. 2019, 39, 195–198. [Google Scholar]
- Yuan, Z.; Lu, D.; Guo, K. Comparative Study on the UniTire Model and the Magic Formula Model. Automob. Technol. 2006, 7–11. [Google Scholar]
- Guo, K.; Lu, D. UniTire: Unified tire model for vehicle dynamic simulation. Veh. Syst. Dyn. 2007, 45 (Suppl. S1), 79–99. [Google Scholar] [CrossRef]
- Duan, S.; Xu, N.; Shi, Q.; Bai, X. Longitudinal Dynamic Model of Tire Considering Hysteresis Characteristics. J. Mech. Eng. 2023, 59, 364–372. [Google Scholar]
- Chen, W.; Wang, S. Four-Wheel AGV Transporter Straight-Line Movement PID Control and Implementation. Autom. Appl. 2024, 65, 94–96+105. [Google Scholar]
- Huang, J.; Wang, X.; Gao, Y.; Liu, H. Research on path planning and tracking control of four-wheeled independently driven electric vehicles. Mech. Sci. Technol. Aerosp. Eng. 2024, in press.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Unit | Description |
|---|---|---|
| Chassis drive form | / | Four-wheel independent motor drive |
| Steering form | / | Four-wheel independent motor steering |
| Vehicle full load mass | kg | 450 |
| Sprayer wheelbase | mm | 1200 |
| Ground clearance | mm | 600 |
| Maximum working speed | km/h | 20.0 |
| Minimum working speed | km/h | 3.0 |
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB/NB/PS | PB/NB/NS | PM/NM/NB | PM/NM/NB | PS/NS/NB | ZO/ZO/NM | ZO/ZO/PS |
| NM | PB/NB/PS | PB/NB/NS | PM/NM/NB | PS/NS/NM | PS/NS/NM | ZO/ZO/NS | NS/ZO/ZO |
| NS | PM/NB/ZO | PM/NM/NS | PM/NS/NM | PS/NS/NM | ZO/ZO/NM | NS/PS/NS | NS/PS/ZO |
| ZO | PM/NM/ZO | PM/NM/NS | PS/NS/NS | ZO/ZO/NS | NS/PS/NS | NM/PM/NS | NM/PM/ZO |
| PS | PS/NM/ZO | PS/NS/ZO | ZO/ZO/ZO | NS/PS/ZO | NS/PS/ZO | NM/PM/ZO | NM/PB/ZO |
| PM | PS/ZO/PB | ZO/ZO/NS | NS/PS/NS | NM/PS/PS | NM/PM/PS | NM/PB/PS | NB/PB/PB |
| PB | ZO/ZO/PB | ZO/ZO/PM | NM/PS/PM | NM/PM/PM | NM/PM/PS | NB/PB/PS | NB/PB/PB |
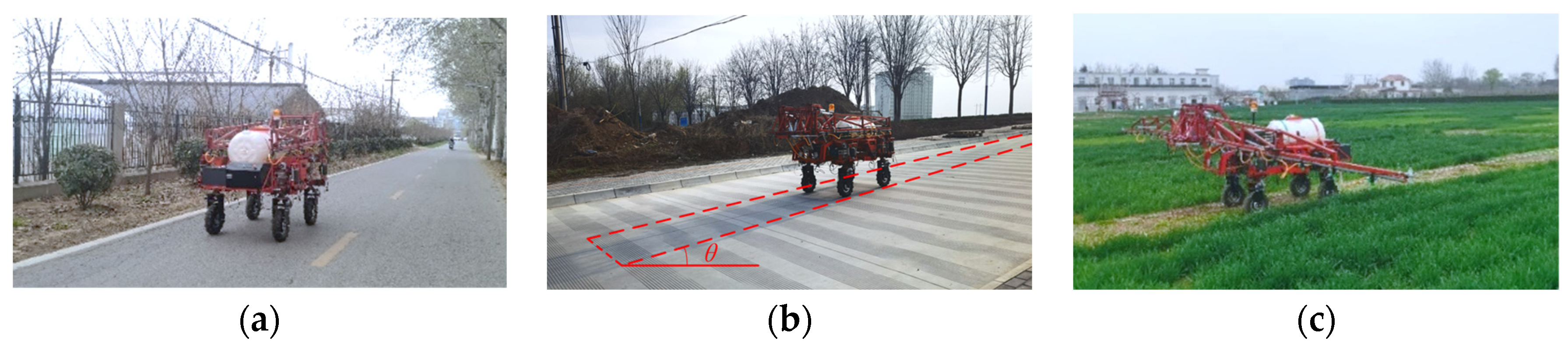
| Test Scene | Test Grouping | Road Conditions | Driving Conditions |
|---|---|---|---|
| Transit transportation | Group 1 | Asphalt concrete roads | Accelerate in a straight line to a constant speed |
| Group 2 | Concrete pavement | Driving straight uphill | |
| Field operations | Group 3 | Compacted dirt road | Accelerate in a straight line to a constant speed |
| Parameter Name | Maximum Values | Minimum Value | RMS Value |
|---|---|---|---|
| Speed (m/s) | 2.13 | 1.85 | 1.91 |
| Acceleration (m/s2) | 0.08 | −0.01 | 0.06 |
| Parameter Name | Maximum Values | Minimum Value | RMS Value |
|---|---|---|---|
| Speed when traveling horizontally (m/s) | 2.39 | 2.14 | 2.24 |
| Speed when traveling uphill (m/s) | 2.38 | 2.11 | 2.28 |
| Acceleration while traveling horizontally (m/s2) | 0.08 | −0.09 | 0.063 |
| Acceleration when traveling uphill (m/s2) | 0.27 | −0.03 | 0.221 |
| Pitch angle when traveling horizontally (°) | 1.55 | 0.12 | 1.47 |
| Pitch angle when traveling uphill (°) | 9.35 | 7.64 | 8.42 |
| Parameter Name | Maximum Values | Minimum Value | RMS Value |
|---|---|---|---|
| Speed (m/s) | 1.41 | 1.28 | 1.35 |
| Acceleration (m/s2) | 0.64 | −0.03 | 0.013 |
| Pitch angle (°) | 9.24 | 2.89 | 13.74 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, L.; Hu, C.; Chen, Y.; Guo, P.; Zhang, L.; Liu, J.; Chen, Y. Research and Experiment on Cruise Control of a Self-Propelled Electric Sprayer Chassis. Agriculture 2024, 14, 902. https://doi.org/10.3390/agriculture14060902
Zhou L, Hu C, Chen Y, Guo P, Zhang L, Liu J, Chen Y. Research and Experiment on Cruise Control of a Self-Propelled Electric Sprayer Chassis. Agriculture. 2024; 14(6):902. https://doi.org/10.3390/agriculture14060902
Chicago/Turabian StyleZhou, Lingxi, Chenwei Hu, Yuxiang Chen, Peijie Guo, Liwei Zhang, Jinyi Liu, and Yu Chen. 2024. "Research and Experiment on Cruise Control of a Self-Propelled Electric Sprayer Chassis" Agriculture 14, no. 6: 902. https://doi.org/10.3390/agriculture14060902