
Design and Test of a Crawler-Type On-Film Precision Cotton Seeding Device on DEM-CFD



Abstract
1. Introduction
2. Structures and Working Principle
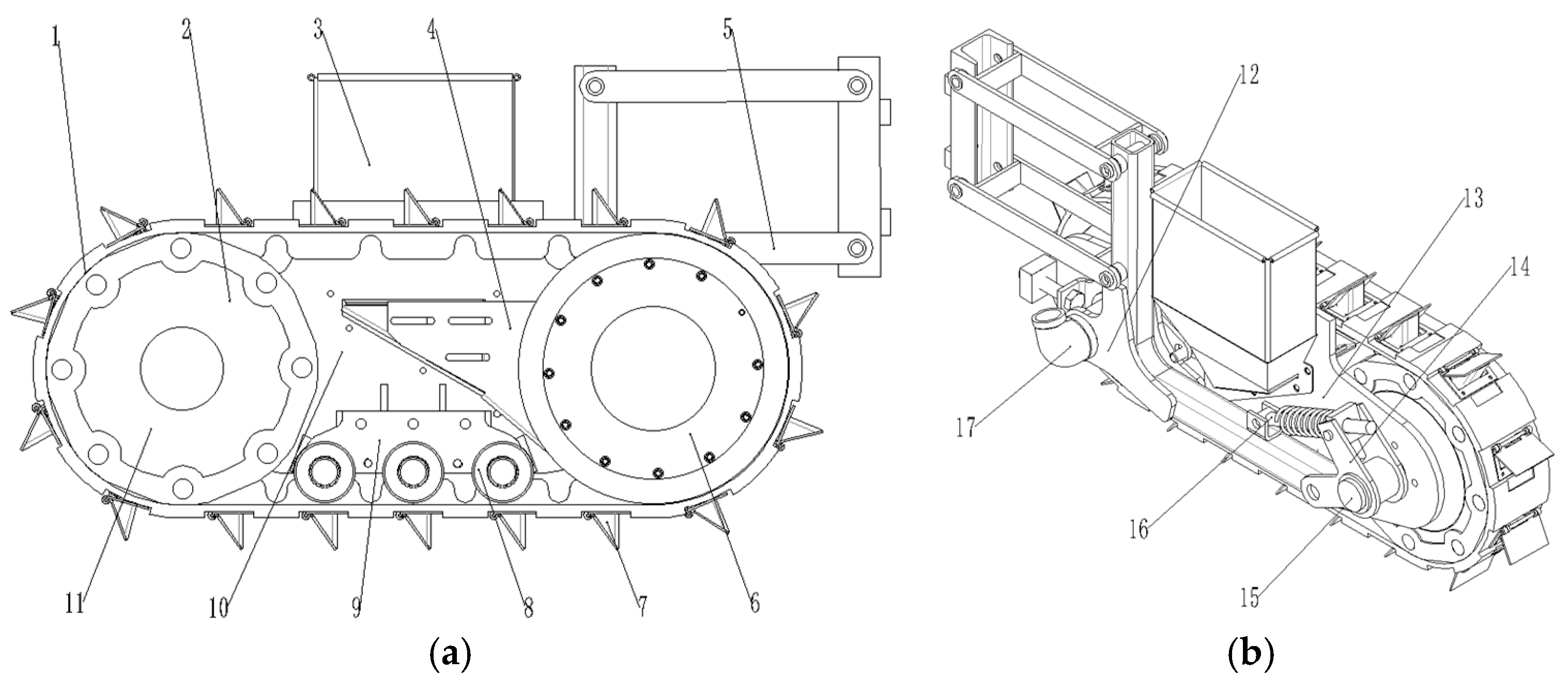
2.1. Overall Structure
2.2. Working Principle
3. Design of Key Structures
3.1. Structural Design of the Guide Wheels (Seeding Wheels)
3.1.1. Physical Properties of Cotton Seeds
3.1.2. Shape and Size of Suction Holes
3.1.3. Determination of Suction Hole Number
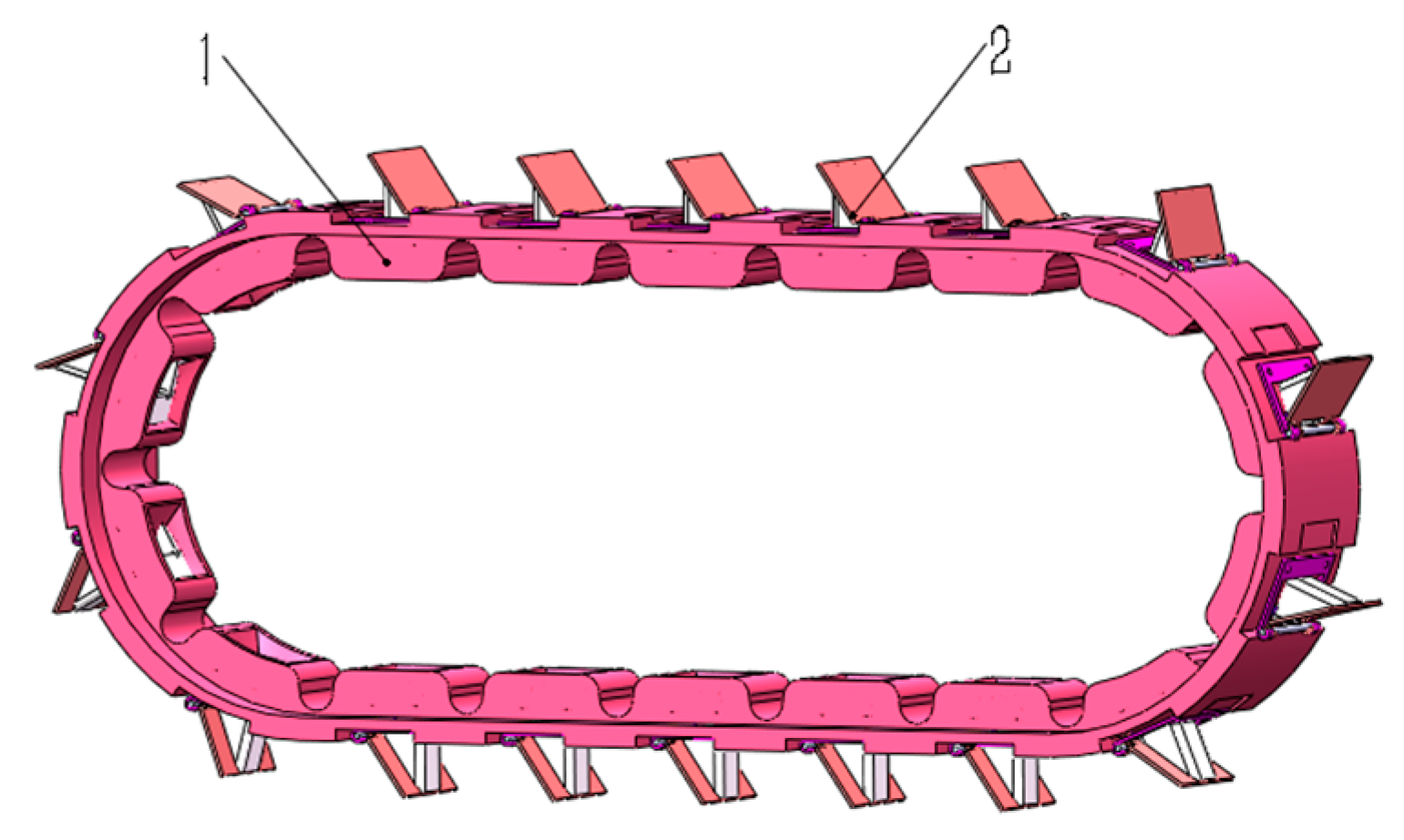
3.2. Design of the Hole-Forming Structure
3.2.1. Design of the Hole-Forming Crawler
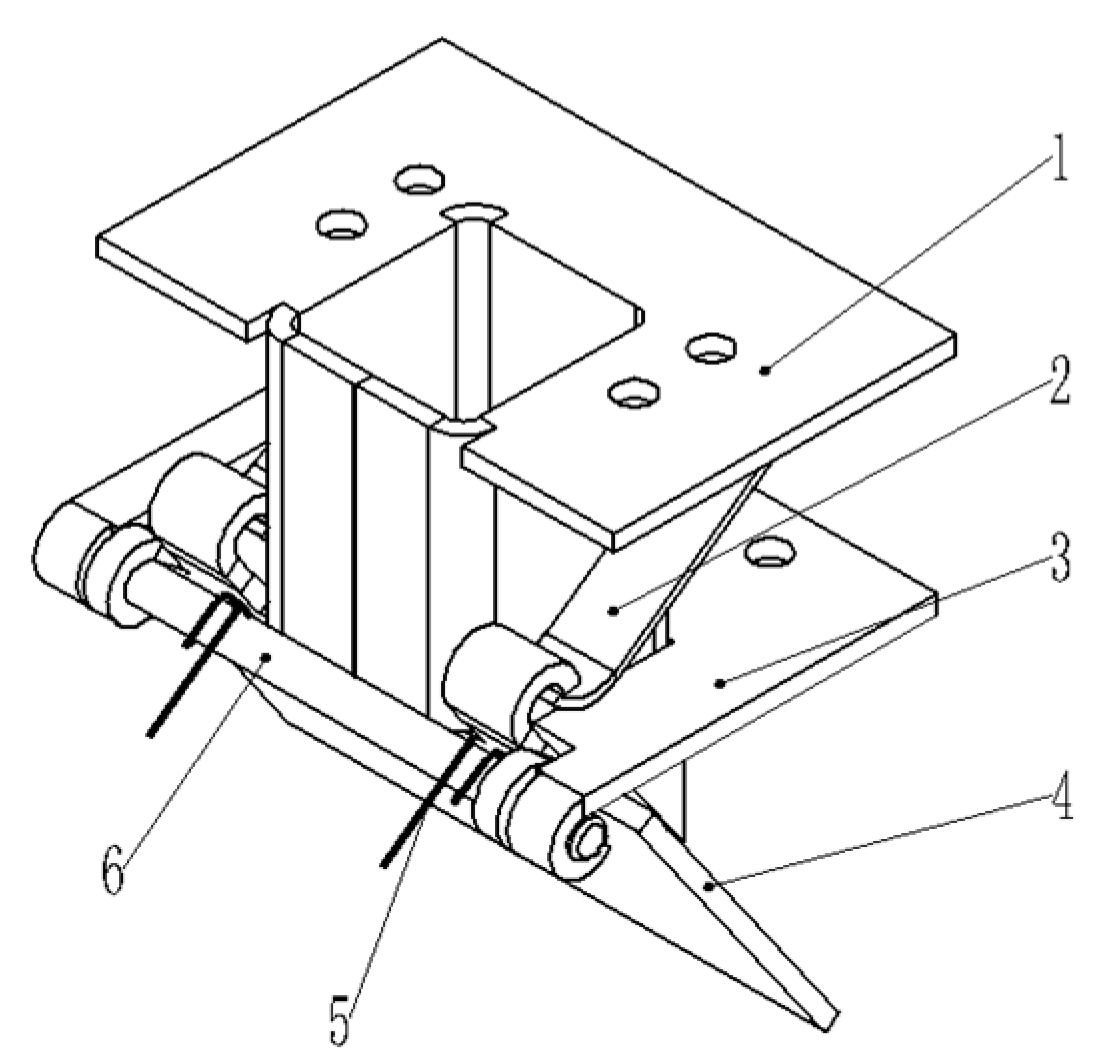
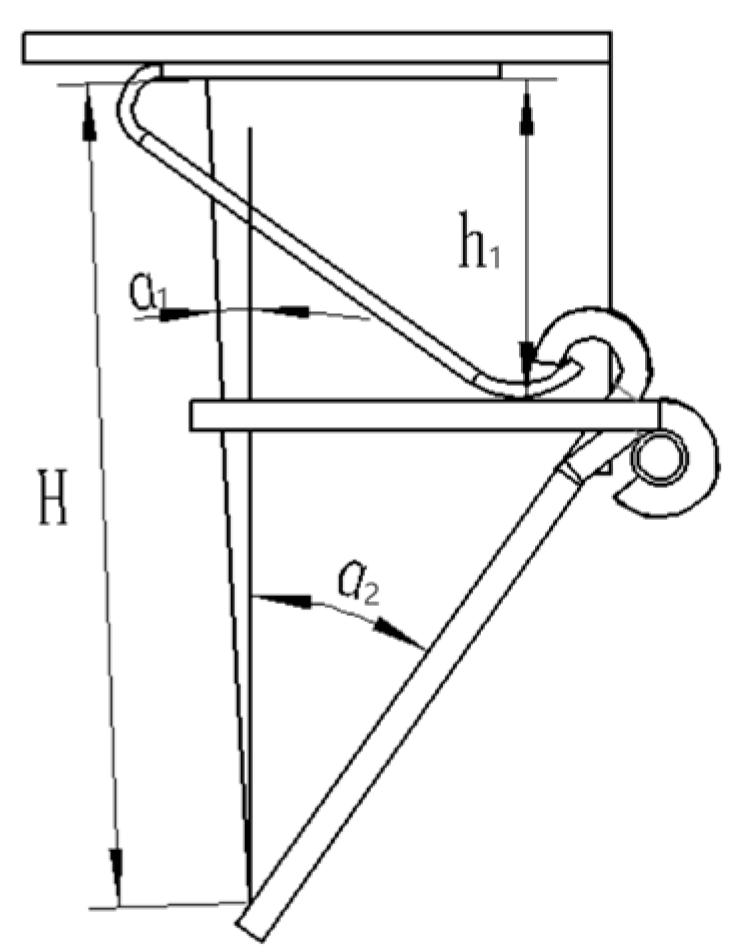
3.2.2. Design of Hole-Forming Duckbills
3.3. Design of a Seed-Clearing Device
3.4. Design of Pressure Relief Structure
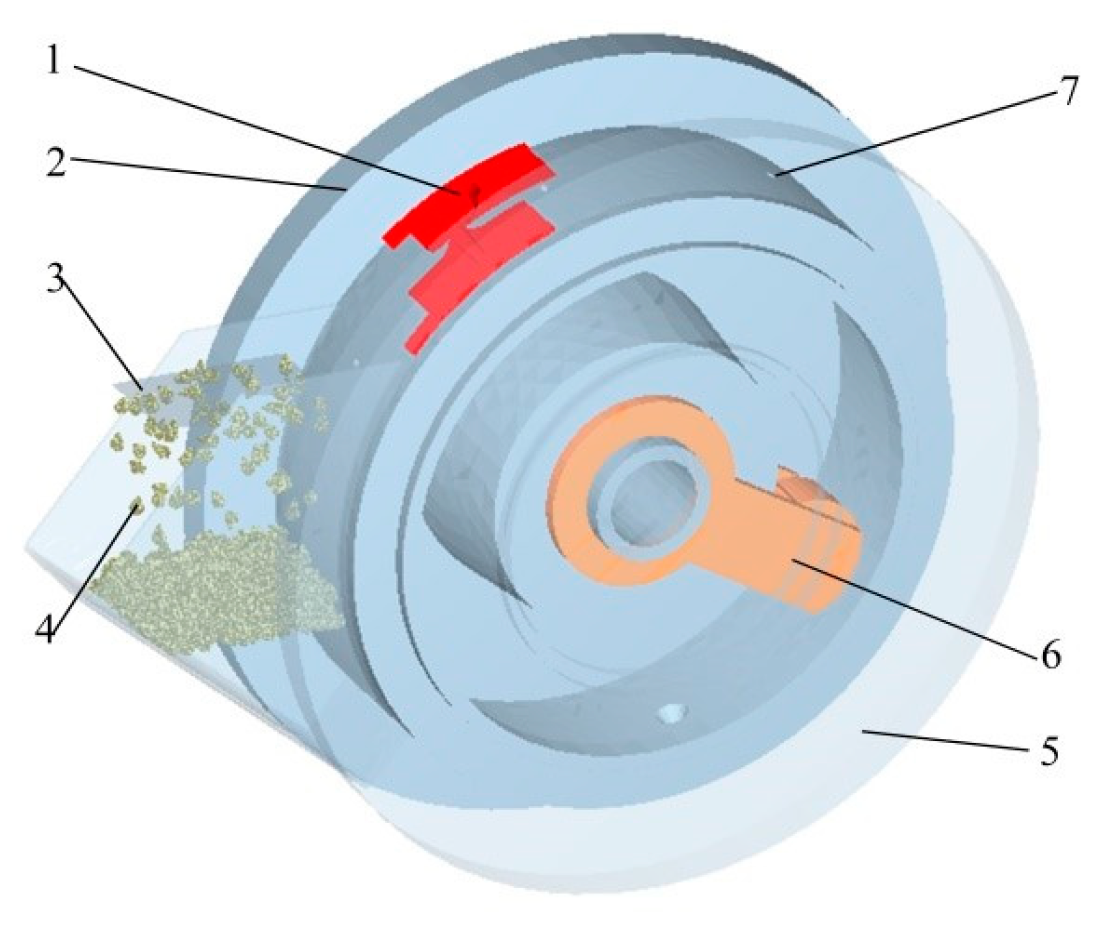
4. Simulation Analysis
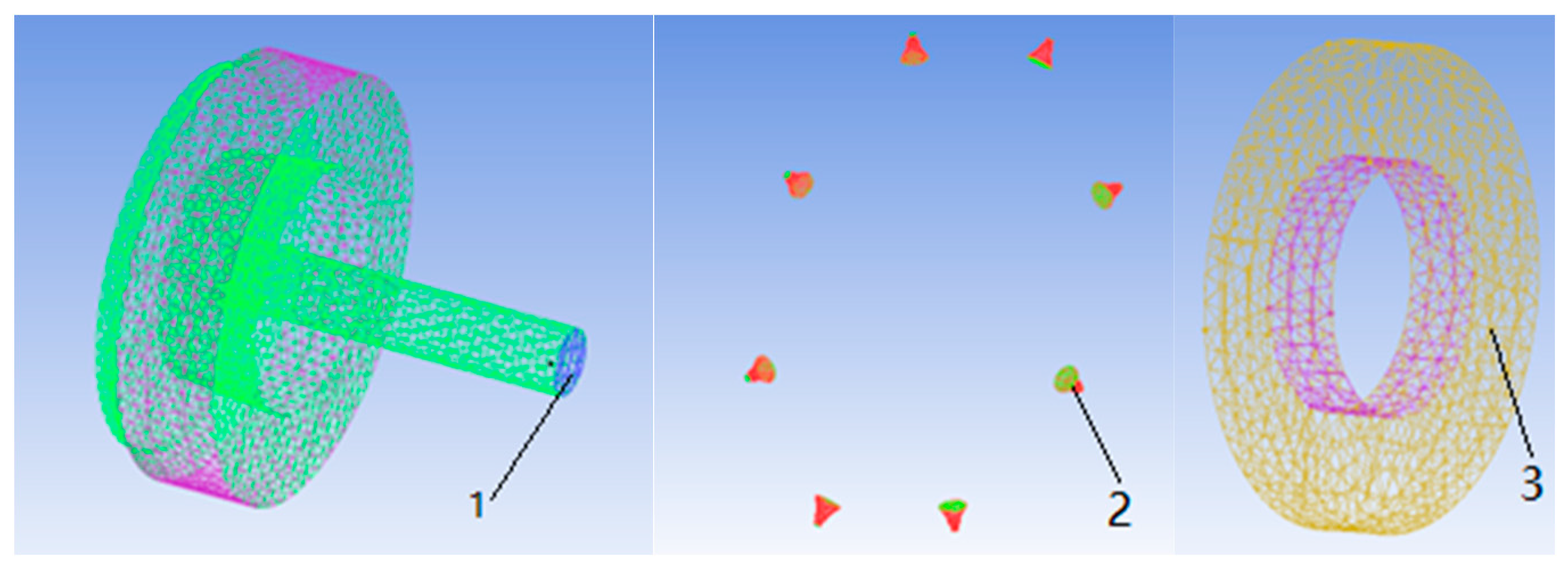
4.1. Modeling
4.2. Determination of Simulation Parameters
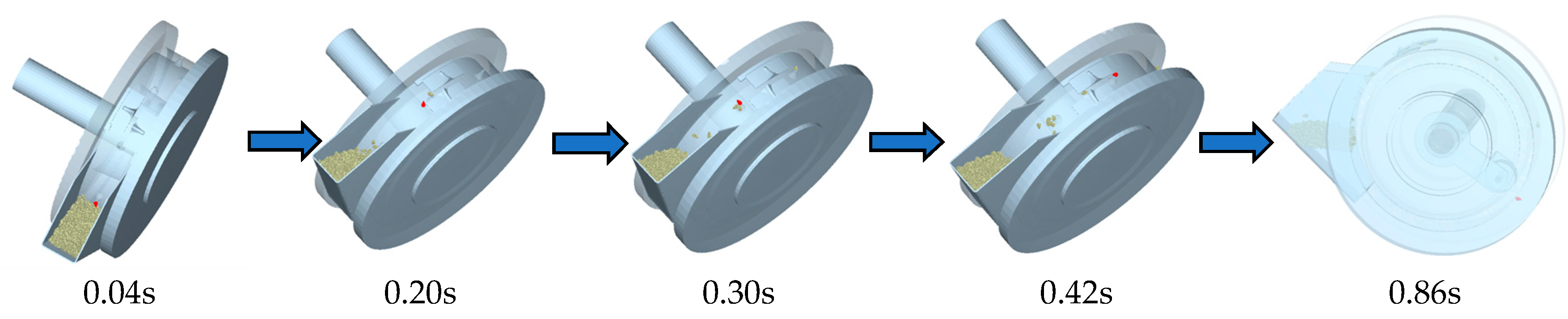
4.3. Results and Analysis
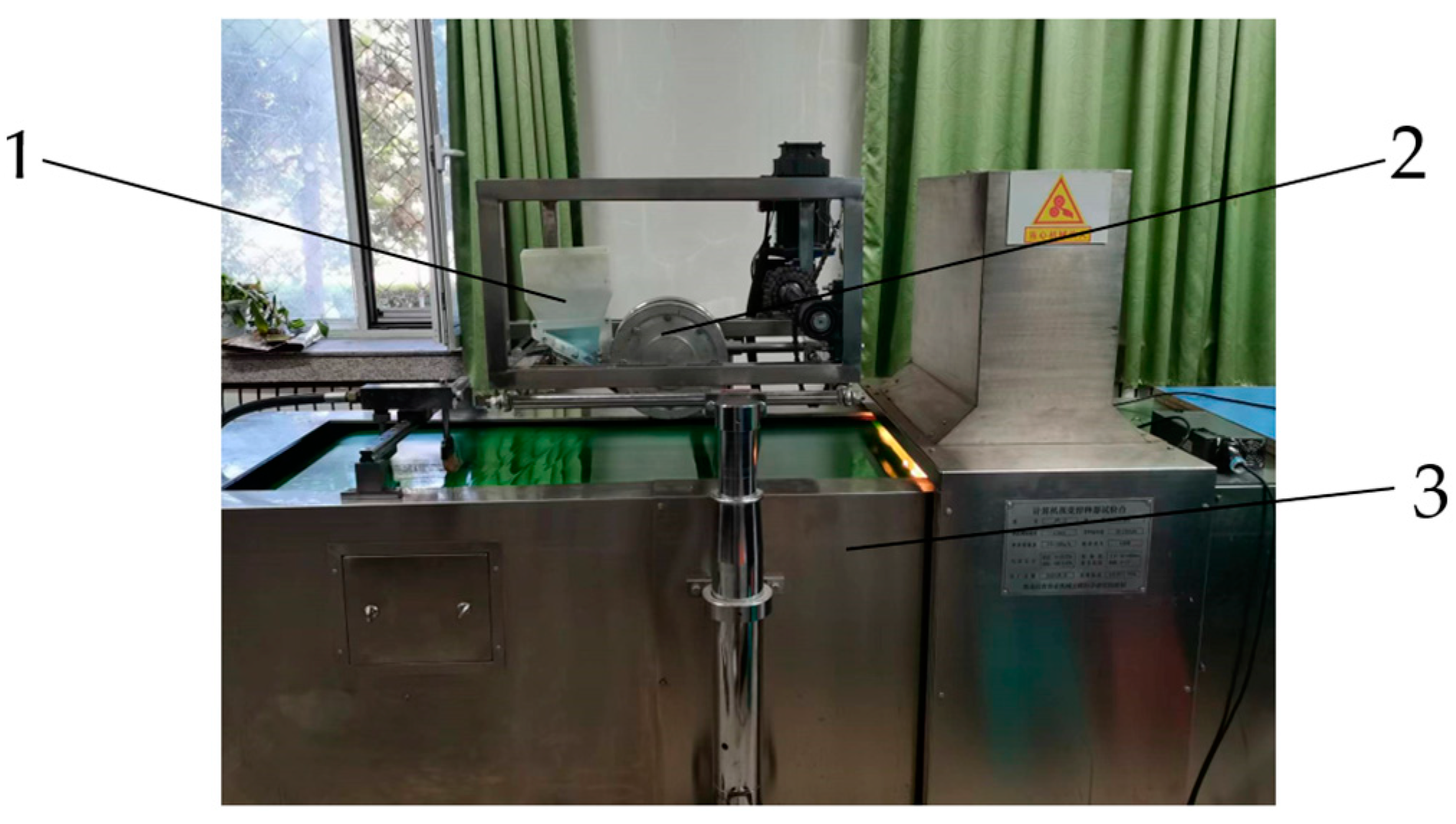
5. Bench Test and Analysis
5.1. Test Materials
5.2. Test Design
5.3. Results and Analysis
5.3.1. Response Surface Methodology (RSM) Design and Results
5.3.2. ANOVA with Regression Models
5.3.3. Interactions of Different Factors
6. Parameter Optimization and Experimental Verification
7. Conclusions
- (1)
- A new crawler-type on-film precision seeding device is designed by extending the duckbill hole-forming device to form hole-forming belts and lateral seed taking. The structure and composition of the hole-forming device are introduced. The working principle determines the structural parameters of the key components of the structure. DEM-CFD gas–solid coupling simulation is used to simulate the drag force and movement speed parameters of cotton seeds during seeding. After the simulation, a response surface test is conducted to establish mechanical models of the operation process and analyze the effects of suction hole diameter, pressure relief block length, and air pressure on the seeding performance.
- (2)
- An orthogonal combination test is designed, and the RSM software Design Expert 10.0.3 is used to analyze the impact of test factors on the response index. The optimal working parameter combination of the crawler-type on-film cotton hole seeder include the following: suction hole diameter of 3.6 mm, pressure relief block length of 63.4 mm, and air pressure of 3.8 kPa. At this time, the performance indicators of the crawler-type cotton on-film hole seeder are a qualified single-seed index of 94.936%, missing index of 1.329%, and multiple index of 3.2%.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, L.F. Coupling Effect of Water and Fertilizer under Fertingation and Simulation Growth of Cotton in Xinjiang. Ph.D. Thesis, Northwest A&F University, Xi’an, China, 2015. [Google Scholar]
- Zhang, J.X.; Jiang, Y.X.; Liu, C.; Wang, X.N.; Cheng, F. Implementation status of cotton’s whole course mechaniztion in Xinjiang. Chin. Agric. Mech. 2012, 3, 33–35. [Google Scholar]
- Zhang, J.X.; Liu, A.P.; Li, H.; Wang, Y.; Liu, X.; YeErBoLati, T.M. Development of microwave pyrolysis equipment for cotton stalk carbon. Trans. Chin. Soc. Agric. Eng. 2020, 36, 219–225, (In Chinese with English abstract). [Google Scholar]
- Wang, X.J. Impact and Adaptation of Climate Change on Cotton Phenology, Yield and Fiber Quality in Xinjiang. Ph.D. Thesis, China Agricultural University, Beijing, China, 2015. [Google Scholar]
- Zhou, L.F.; Zhao, W.Z.; Yang, R.; Feng, H. Soil temperature modeling in topsoil with plastic film mulching and low spring temperatures. Arch. Agron. Soil Sci. 2020, 66, 1936–1947. [Google Scholar] [CrossRef]
- Shen, Q.X.; Ding, R.S.; Du, T.S.; Tong, L.; Li, S. Water Use Effectiveness Is Enhanced Using Film Mulch Through Increasing Transpiration and Decreasing Evapotranspiration. Water 2019, 11, 1153. [Google Scholar] [CrossRef]
- Wen, H.J.; Niu, Q.; Ji, C. Current status of and annalysis on the mechanical technology of plastic film. J. China Agric. Univ. 2017, 22, 145–153. [Google Scholar]
- Zhang, D.X. The problem of agricultural plastic film recycling. J. China Agric. Univ. 1998, 3, 103–106. [Google Scholar]
- Li, M.; Wang, W.B.; Du, S.; Guo, S.; Li, J. Experiment study on adsorption accuracy of air-suction cutton dibbler. J. Chin. Agric. Mech. 2016, 37, 10–13. [Google Scholar] [CrossRef]
- DB65/T2110-2019; Technical Regulations for the Cultivation of Natural Color Cotton. Xinjiang Uygur Autonomous Region Market Supervision and Administration Bureau: Urumqi, China, 2019.
- Li, Z.D.; Li, S.S.; Cao, X.Y.; Lei, X.; Liao, Y.; Wei, Y.; Liao, Q. Seeding performance experiment of pneumatic-typed precision centralized metering device. Trans. Chin. Soc. Agric. Eng. 2015, 31, 17–25, (In Chinese with English abstract). [Google Scholar]
- Zhang, B.P. Design Principle of Seeding Machine; China Machine Press: Beijing, China, 1982. [Google Scholar]
- Chinese Academy of Agricultural Mechanization Sciences, Agricultural Machinery Design Handbook; China Agricultural Science and Technology Press: Beijing, China, 2007; Volume 1, pp. 357–358.
- Ni, X.D.; Xu, G.J.; Wang, Q.; Peng, X.; Hu, B. Design and Experiment of Pneumatic Cylinder Array Precision Seed-metering Device for Cotton. Trans. Chin. Soc. Agric. Mach. 2017, 48, 58–67. (In Chinese) [Google Scholar]
- DGT100-2023; Filming (Tape) Planter. Ministry of Agriculture and Rural Affairs of the People’s Republic of China: Beijing, China, 2023.
- Wang, G. Design and Test of Duckbill Seed-Metering Device for Rice Film Spreading and Hole Sowing Machine. Master’s Thesis, Anhui Agricultural University, Hefei, China, 2023. [Google Scholar]
- Teng, Y.J. Design and Study on Key Parts of Type 2BMC-4/8 Precision Hillplanter for Cotton. Master’s Thesis, Shandong University of Technology, Zibo, China, 2015. [Google Scholar]
- Zhang, X.J.C.Y.; Shi, Z.L.; Jin, W.; Zhang, H.T.; Fu, H.; Wang, D.J. Design and experiment of double-storage turntable cotton vertical disc hole seeding and metering device. Trans. Chin. Soc. Agric. Mach. 2021, 37, 27–36. [Google Scholar] [CrossRef]
- Cai, Y.Q.; Luo, X.; Hu, B.; Mao, Z.B.; Li, J.W.; Guo, M.Y.; Wang, J. Theoretical and experimental analyses of high-speed seed filling in limited gear-shaped side space of cotton precision dibbler. Comput. Electron. Agric. 2022, 200, 107202. [Google Scholar] [CrossRef]
- Li, Y.M.; Zhao, Z.; Chen, J.; Xu, L. Element method simulation of seeds motion in vibrated bed of precision vacuum seeder. Trans. Chin. Soc. Agric. Mach. 2009, 40, 56–59. (In Chinese) [Google Scholar]
- Shi, S. Design and Experimental Research of the Tic Maize Precision Seed-Metering Device with Combined Holes. Ph.D. Thesis, China Agricultural University, Beijing, China, 2015. (In Chinese). [Google Scholar]
- Wang, Y.X.; Liang, Z.J.; Zhang, D.X.; Cui, T.; Shi, S.; Li, K.; Yang, L. Calibration method of contact characteristic parameters for corn seeds based on EDEM. Trans. Chin. Soc. Agric. Mach. 2016, 32, 36–42. (In Chinese) [Google Scholar]
- Wang, Z.; Zhao, W.Y.; Shi, L.R.; Sun, B.G.; Sun, W.; Dai, F.; Zhou, G.; Guo, J.H.; Rao, G.; Li, H. Optimization of the motion parameters of a rolling spoon type precision hole planter based on DEM-MBD coupling. J. China Agric. Univ. 2024, 29, 66–77. [Google Scholar] [CrossRef]
- Tan, B.F.; Duan, H.B.; Fu, J.; Sun, H.J.; Cai, X.K.; Li, Z.L. Performance simulation of triangle Chain cup-spoon potato seed feeder based on RecurDyn-EDEM coupling. J. Gansu Agric. Univ. 2023, 58, 218–227. [Google Scholar] [CrossRef]
- Dong, X.Q.; Su, C.; Zheng, H.N.; Han, R.Q.; Li, Y.L.; Wang, L.P.C.; Song, J.N.; Wang, J.C. Analysis of soil disturbance process by vibrating subsoiling based on DEM-MBD coupling algorithm. Trans. Chin. Soc. Agric. Mach. 2022, 38, 34–43. [Google Scholar] [CrossRef]
- GB6973-2005; Testing Methods of Single Seed Drills (Precision Drills). General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China: Beijing, China; Standardization Administration of the People’s Republic of China: Beijing, China, 2005.
- Tang, Q.Y.; Feng, G.M. DPS Data Processing System: Experimental Design, Statistical Analysis and Data Mining; Science Press: Beijing, China, 2001. [Google Scholar]
- JB/T10293-2013; Technical Conditions of Single Grain (Precision) Seeder. Ministry of Industry and Information Technology: Beijing, China, 2013.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Xinluzao 53 | Xinluzao 61 | Jinken 1775 |
|---|---|---|---|
| Length (mm) | 8.78 | 8.49 | 9.09 |
| Width (mm) | 4.68 | 4.71 | 4.77 |
| Thickness (mm) | 4.2 | 4.4 | 3.89 |
| Items | Parameter | Value |
|---|---|---|
| Properties of cotton | Poisson’s ratio | 0.18 |
| Shear modulus/Pa | 1.5 × 106 | |
| Density/(kg·m−3) | 641 | |
| Material properties of seeding device | Poisson’s ratio | 0.33 |
| Shear modulus/Pa | 7 × 1010 | |
| Density/(kg·m−3) | 2.7 × 103 | |
| Collision recovery coefficient | Seed–seed | 0.4 |
| Seed–seeding device | 0.56 | |
| Static friction factor | Seed–seed | 0.49 |
| Seed–seeding device | 0.52 | |
| Dynamic friction factor | Seed–seed | 0.06 |
| Seed–seeding device | 0.2 | |
| Other parameters | Acceleration due to gravity/(m·s−2) | 9.81 |
| Factors | Levels | ||
|---|---|---|---|
| −1 | 0 | 1 | |
| A—Suction hole diameter (mm) | 3 | 3.5 | 4 |
| B—Length of pressure relief bloc (mm) | 28 | 49 | 70 |
| C—Air pressure (kPa) | 3 | 3.5 | 4 |
| No. | A | B | C | Qualified Single-Seed Index Y1/% | Missing Index Y2/% | Multiple Index Y3/% |
|---|---|---|---|---|---|---|
| 1 | 3 | 28 | 3.5 | 93.72 | 1.68 | 4.6 |
| 2 | 4 | 28 | 3.5 | 92.48 | 1.62 | 5.9 |
| 3 | 3 | 70 | 3.5 | 94.94 | 1.51 | 3.55 |
| 4 | 4 | 70 | 3.5 | 93.66 | 1.42 | 4.92 |
| 5 | 3 | 49 | 3 | 92.13 | 1.73 | 6.14 |
| 6 | 4 | 49 | 3 | 90.87 | 1.68 | 7.45 |
| 7 | 3 | 49 | 4 | 93.44 | 1.49 | 5.07 |
| 8 | 4 | 49 | 4 | 93.21 | 1.25 | 5.54 |
| 9 | 3.5 | 28 | 3 | 91.05 | 1.89 | 7.06 |
| 10 | 3.5 | 70 | 3 | 91.92 | 1.77 | 6.31 |
| 11 | 3.5 | 28 | 4 | 92.63 | 1.58 | 5.79 |
| 12 | 3.5 | 70 | 4 | 94.46 | 1.31 | 4.23 |
| 13 | 3.5 | 49 | 3.5 | 94.68 | 1.51 | 3.81 |
| 14 | 3.5 | 49 | 3.5 | 94.7 | 1.47 | 3.83 |
| 15 | 3.5 | 49 | 3.5 | 94.98 | 1.46 | 3.56 |
| 16 | 3.5 | 49 | 3.5 | 94.85 | 1.45 | 3.7 |
| 17 | 3.5 | 49 | 3.5 | 94.91 | 1.45 | 3.64 |
| Source | Sum of Squares | Degrees of Freedom | Mean Square | F | p |
|---|---|---|---|---|---|
| Model | 30.8 | 9 | 3.42 | 99.8 | <0.0001 ** |
| A | 2.01 | 1 | 2.01 | 58.63 | 0.0001 ** |
| B | 3.25 | 1 | 3.25 | 94.83 | <0.0001 ** |
| C | 7.55 | 1 | 7.55 | 220.11 | <0.0001 ** |
| AB | 0.0004 | 1 | 0.0004 | 0.012 | 0.917 |
| AC | 0.27 | 1 | 0.27 | 7.74 | 0.0272 * |
| BC | 0.23 | 1 | 0.23 | 6.72 | 0.0358 * |
| A2 | 1.58 | 1 | 1.58 | 46.19 | 0.0003 ** |
| B2 | 1.1 | 1 | 1.1 | 32.04 | 0.0008 ** |
| C2 | 13.62 | 1 | 13.62 | 397.13 | <0.0001 |
| Residual | 0.24 | 7 | 0.034 | ||
| Lack of fit | 0.17 | 3 | 0.057 | 3.34 | 0.1374 ns |
| Errors | 0.069 | 4 | 0.017 | ||
| Total | 31.04 | 16 | |||
| R2 = 0.9923, Adj R2 = 0. 9823, Pre R2 = 0.9081 | |||||
| Source | Sum of Squares | Degrees of Freedom | Mean Square | F | p |
|---|---|---|---|---|---|
| Model | 0.44 | 9 | 0.048 | 54.33 | <0.0001 ** |
| A | 0.024 | 1 | 0.024 | 27.19 | 0.0012 ** |
| B | 0.072 | 1 | 0.072 | 81.12 | <0.0001 ** |
| C | 0.26 | 1 | 0.26 | 291.24 | <0.0001 ** |
| AB | 0.000225 | 1 | 0.000225 | 0.25 | 0.6305 |
| AC | 0.00903 | 1 | 0.00903 | 10.14 | 0.0154 * |
| BC | 0.00563 | 1 | 0.00563 | 6.32 | 0.0402 * |
| A2 | 0.000116 | 1 | 0.000116 | 0.13 | 0.7287 |
| B2 | 0.038 | 1 | 0.038 | 42.47 | 0.0003 ** |
| C2 | 0.024 | 1 | 0.024 | 26.43 | 0.0013 ** |
| Residual | 0.00623 | 7 | 0.00089 | ||
| Lack of fit | 0.00375 | 3 | 0.00125 | 2.02 | 0.2542 ns |
| Errors | 0.00248 | 4 | 0.00062 | ||
| Total | 0.44 | 16 | |||
| R2 = 0.9859, Adj R2 = 0.9677, Pre R2 = 0.8553 | |||||
| Source | Sum of Squares | Degrees of Freedom | Mean Square | F | p |
|---|---|---|---|---|---|
| Model | 26.07 | 9 | 2.9 | 114.06 | <0.0001 ** |
| A | 2.48 | 1 | 2.48 | 97.45 | <0.0001 ** |
| B | 2.35 | 1 | 2.35 | 92.69 | <0.0001 ** |
| C | 5.01 | 1 | 5.01 | 197.18 | <0.0001 ** |
| AB | 0.0012 | 1 | 0.0012 | 0.0482 | 0.8324 |
| AC | 0.1764 | 1 | 0.1764 | 6.94 | 0.0337 * |
| BC | 0.164 | 1 | 0.164 | 6.46 | 0.0386 * |
| A2 | 1.61 | 1 | 1.61 | 63.41 | <0.0001 ** |
| B2 | 0.7287 | 1 | 0.7287 | 28.69 | 0.0011 ** |
| C2 | 12.51 | 1 | 12.51 | 492.39 | <0.0001 |
| Residual | 0.1778 | 7 | 0.0254 | ||
| Lack of fit | 0.1259 | 3 | 0.042 | 3.24 | 0.1431 ns |
| Errors | 0.0519 | 4 | 0.013 | ||
| Total | 26.25 | 16 | |||
| R2 = 0.9932, Adj R2 = 0.9845, Pre R2 = 0.9202 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Pan, F.; Han, D.; Liu, J.; Ji, C. Design and Test of a Crawler-Type On-Film Precision Cotton Seeding Device on DEM-CFD. Agriculture 2024, 14, 962. https://doi.org/10.3390/agriculture14060962
Zhang H, Pan F, Han D, Liu J, Ji C. Design and Test of a Crawler-Type On-Film Precision Cotton Seeding Device on DEM-CFD. Agriculture. 2024; 14(6):962. https://doi.org/10.3390/agriculture14060962
Chicago/Turabian StyleZhang, Hui, Feng Pan, Dalong Han, Jinbao Liu, and Chao Ji. 2024. "Design and Test of a Crawler-Type On-Film Precision Cotton Seeding Device on DEM-CFD" Agriculture 14, no. 6: 962. https://doi.org/10.3390/agriculture14060962
APA StyleZhang, H., Pan, F., Han, D., Liu, J., & Ji, C. (2024). Design and Test of a Crawler-Type On-Film Precision Cotton Seeding Device on DEM-CFD. Agriculture, 14(6), 962. https://doi.org/10.3390/agriculture14060962