
Design and Experiment of Ordinary Tea Profiling Harvesting Device Based on Light Detection and Ranging Perception

 ,
,
Abstract
:1. Introduction
- (1)
- This study proposed integrating LiDAR sensing into a tea profiling harvesting device, addressing the challenges of profiling processes due to a complex tea canopy and diverse terrains.
- (2)
- This study developed a tea harvester prototype equipped with LiDAR sensing for real-time canopy surface extraction, a profiling tea harvesting unit (PTHU), and a cross-platform communication network, showcasing enhanced tea harvesting performance through the incorporation of LiDAR technology.
2. Materials and Methods
2.1. Design and Development of the Tea Profiling Harvesting Device
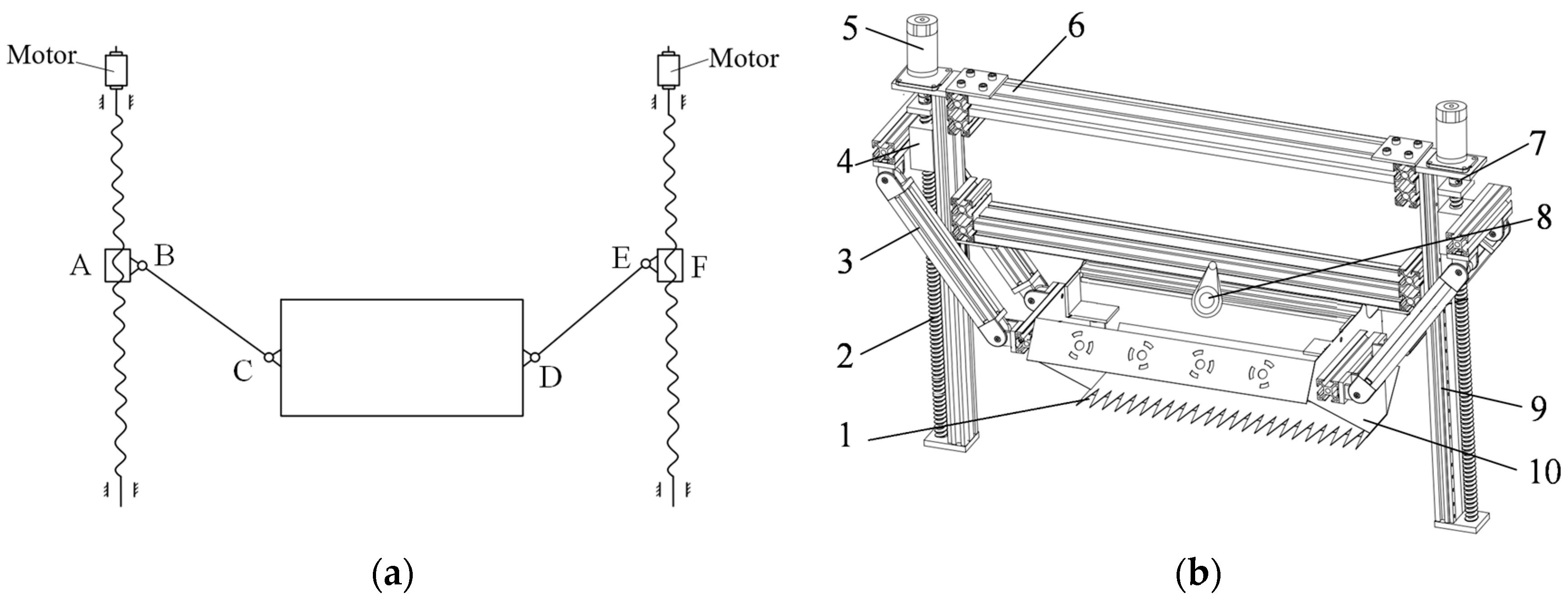
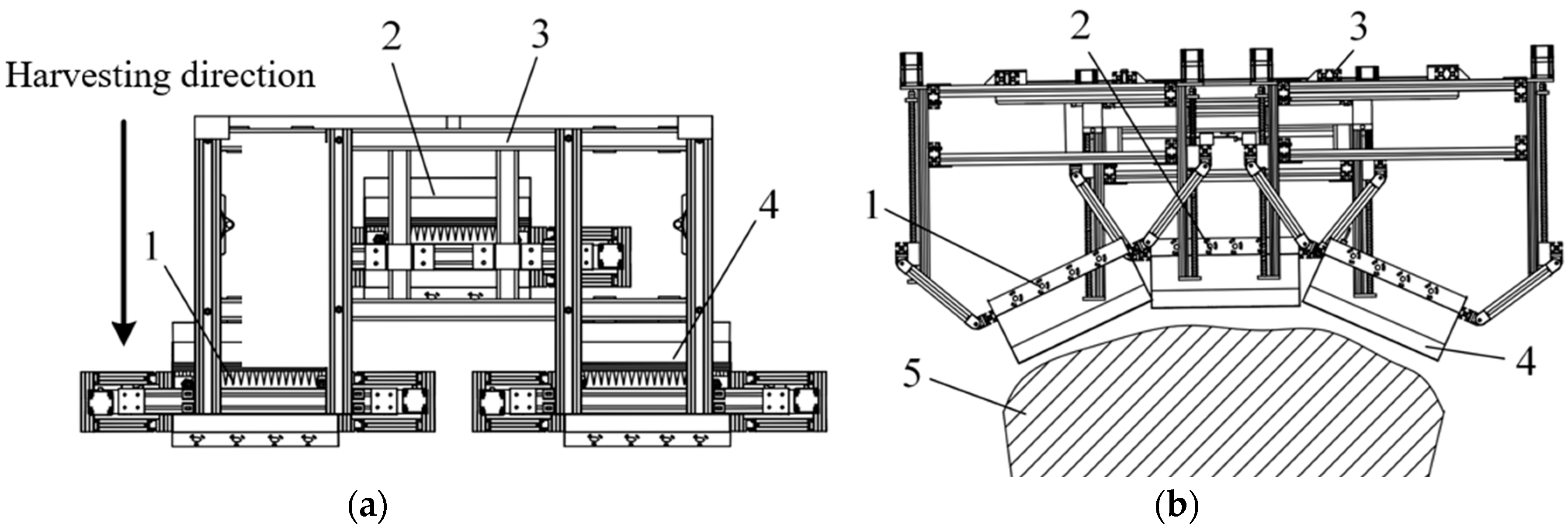
2.1.1. Cutter Profiling Mechanism
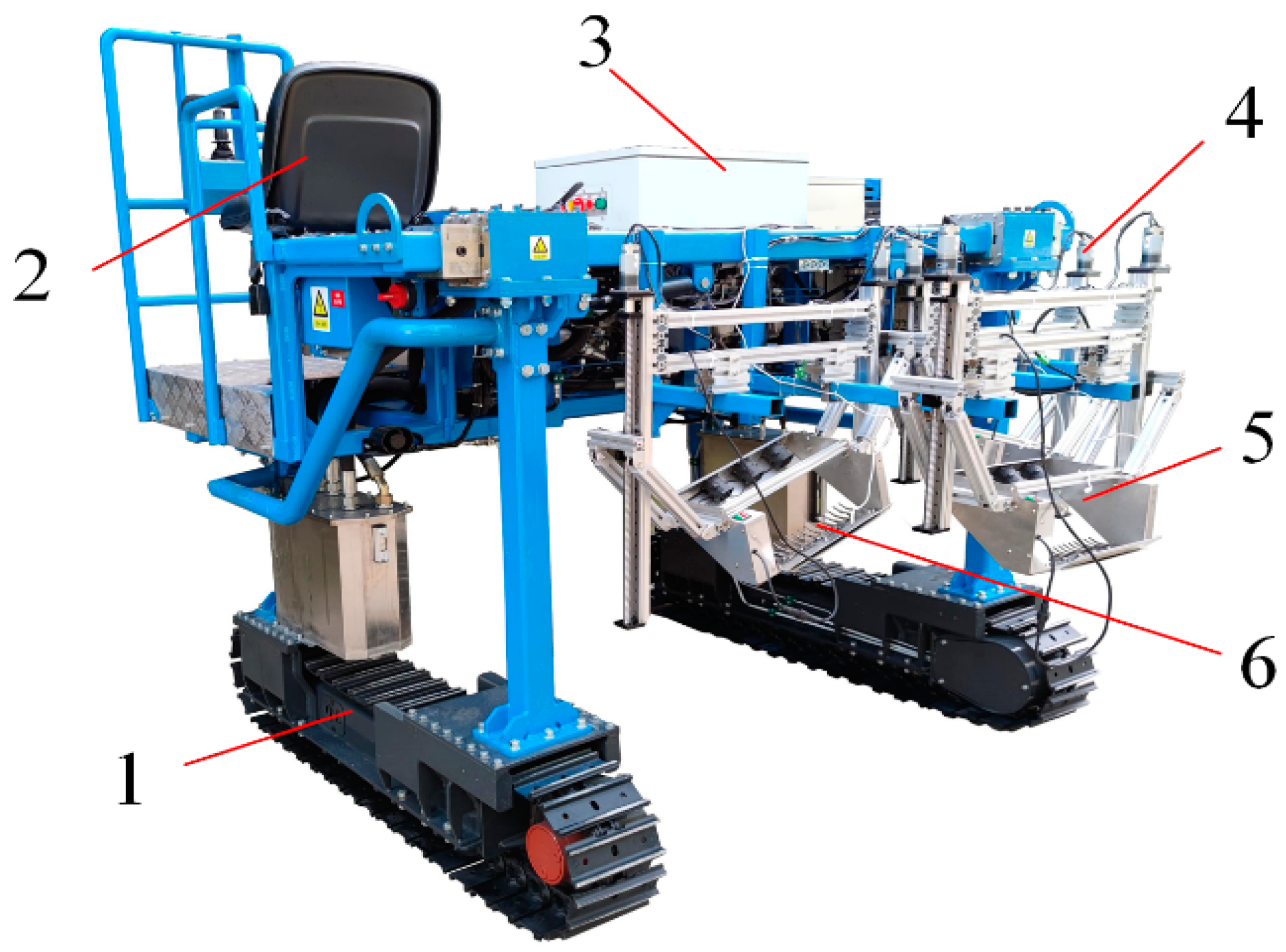
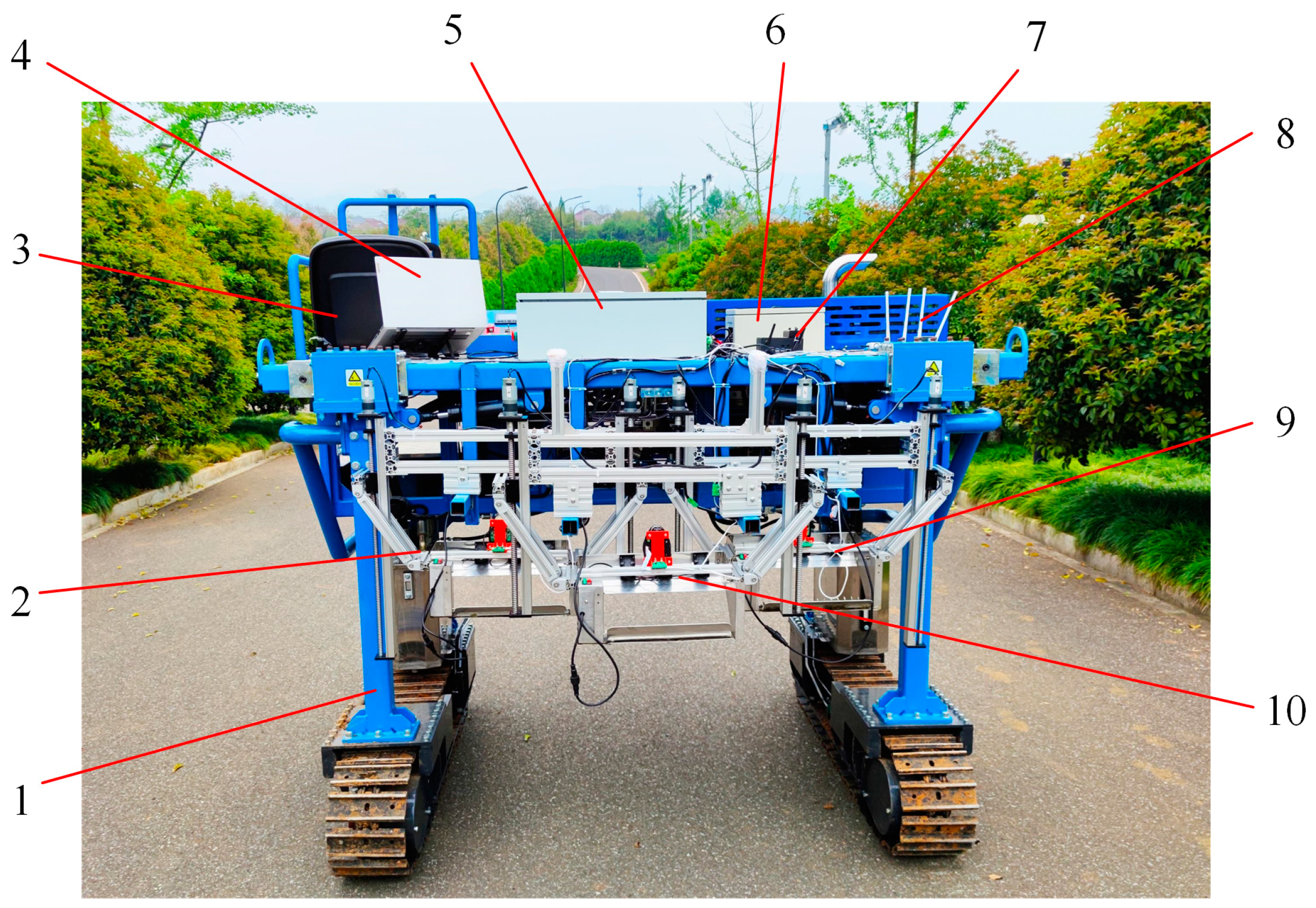
2.1.2. Overall Structure Scheme
2.2. Tea Canopy Surface Perception System through LiDAR
2.2.1. Perception Scheme of Tea Canopy Height
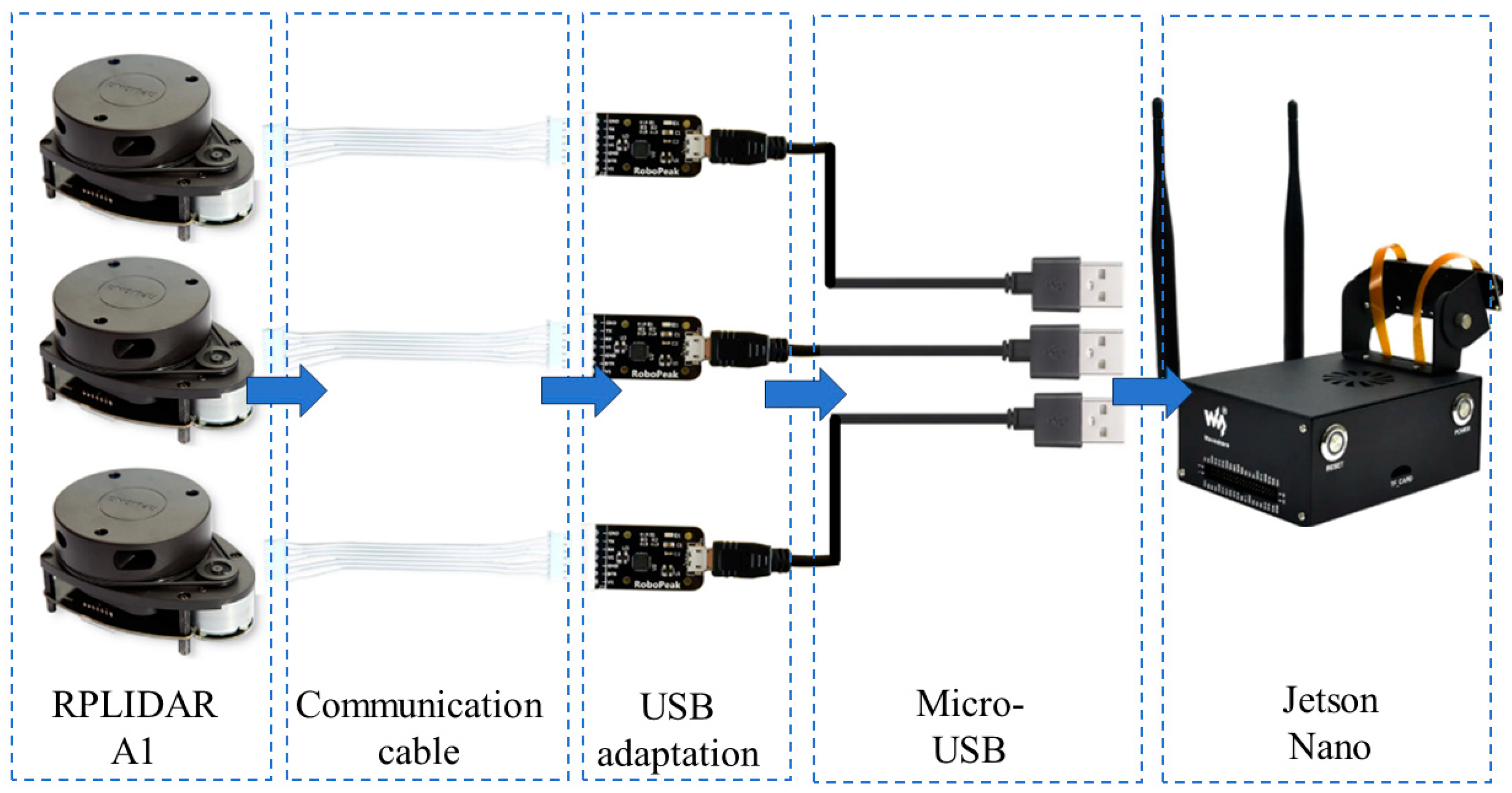
2.2.2. Acquisition of LiDAR Point Cloud
- (1)
- General plan for point cloud acquisition
- (2)
- ROS communication network
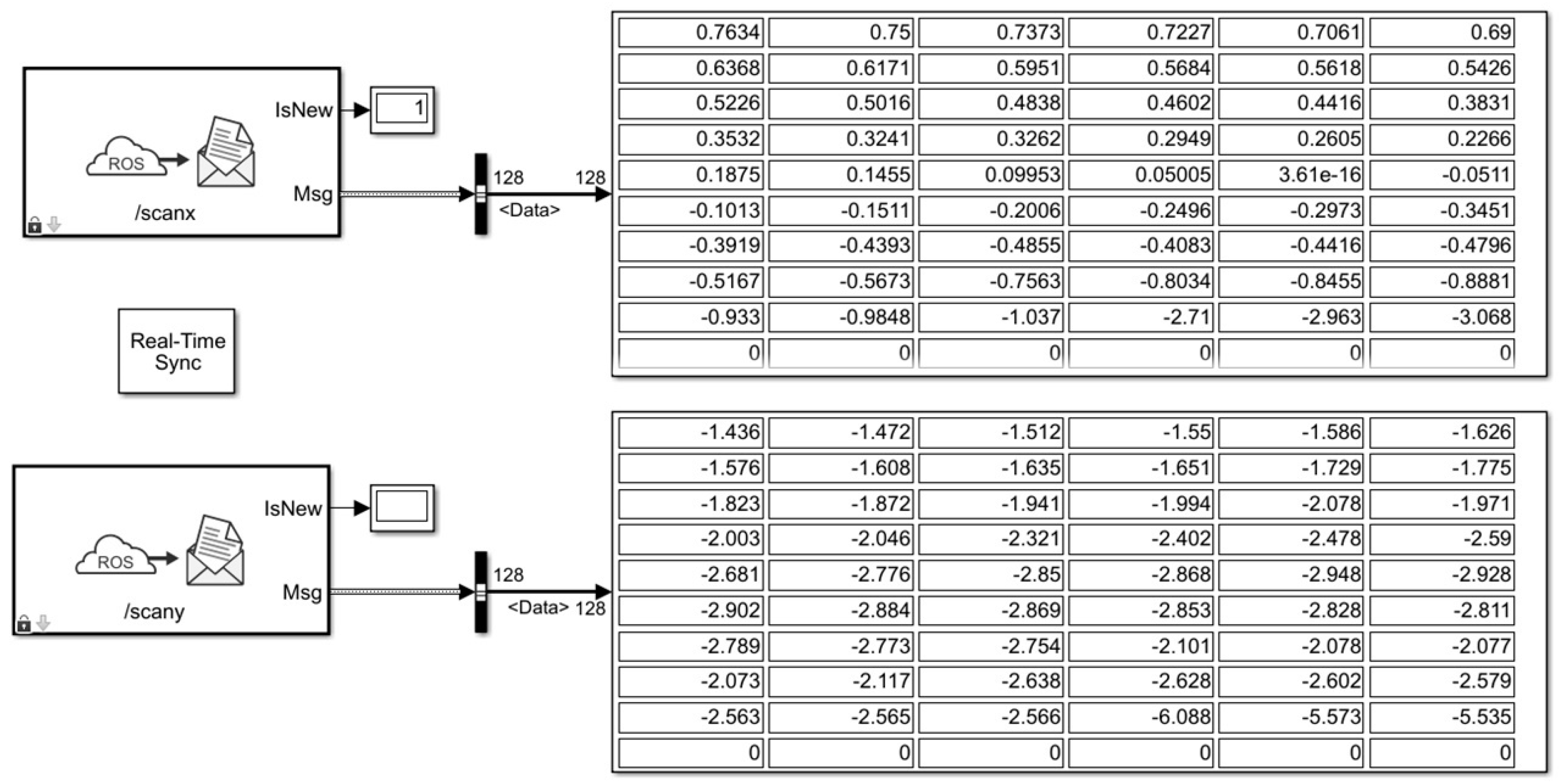
- (3)
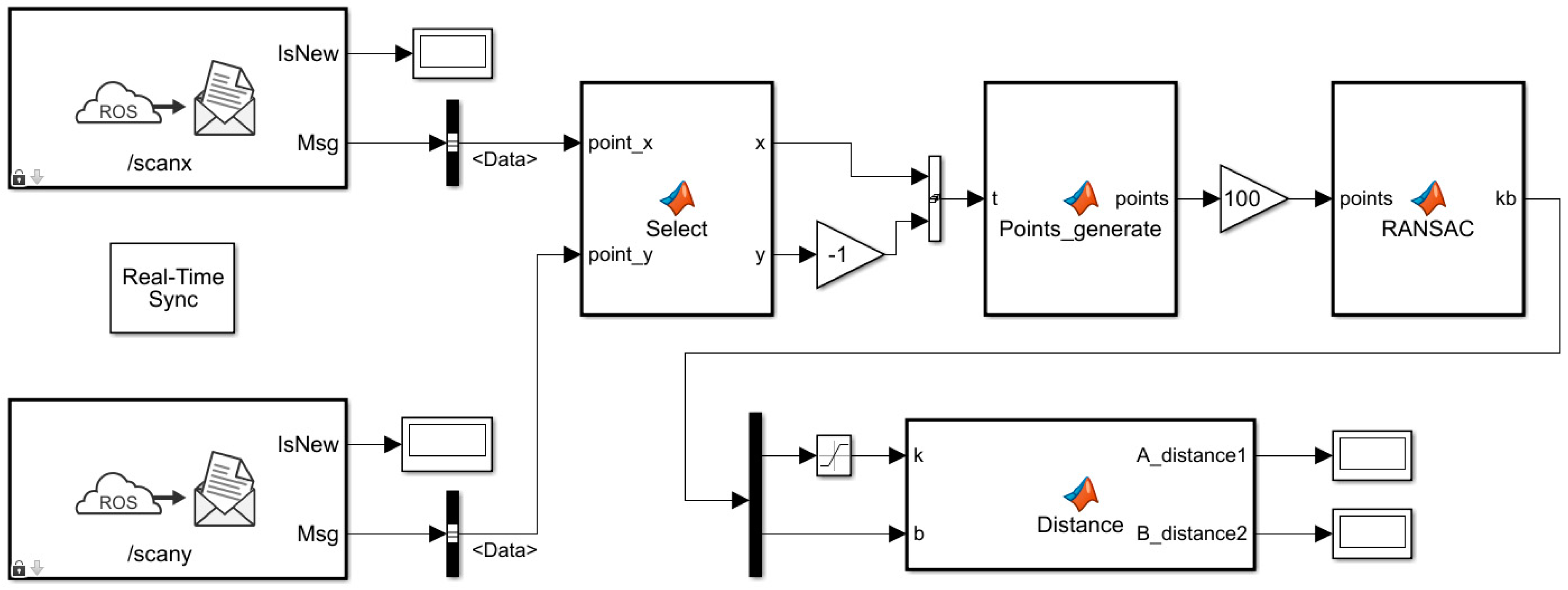
- LiDAR point cloud information reception in Simulink environment
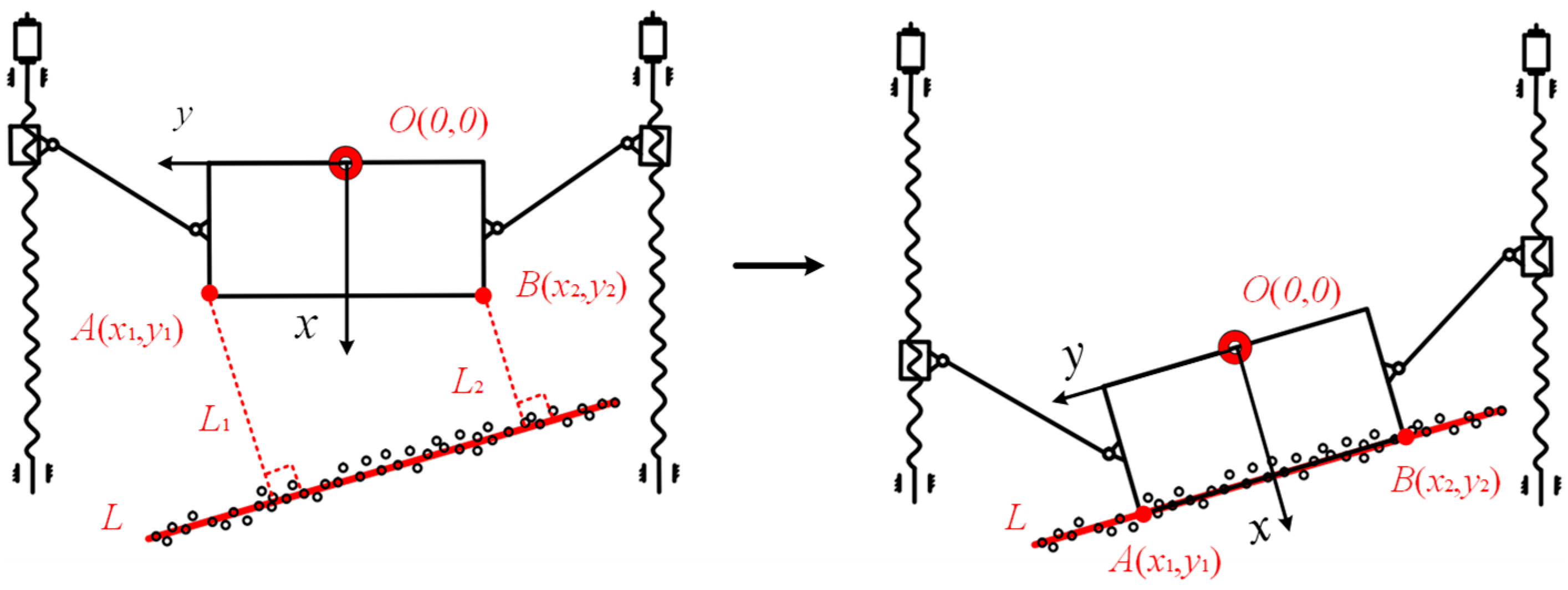
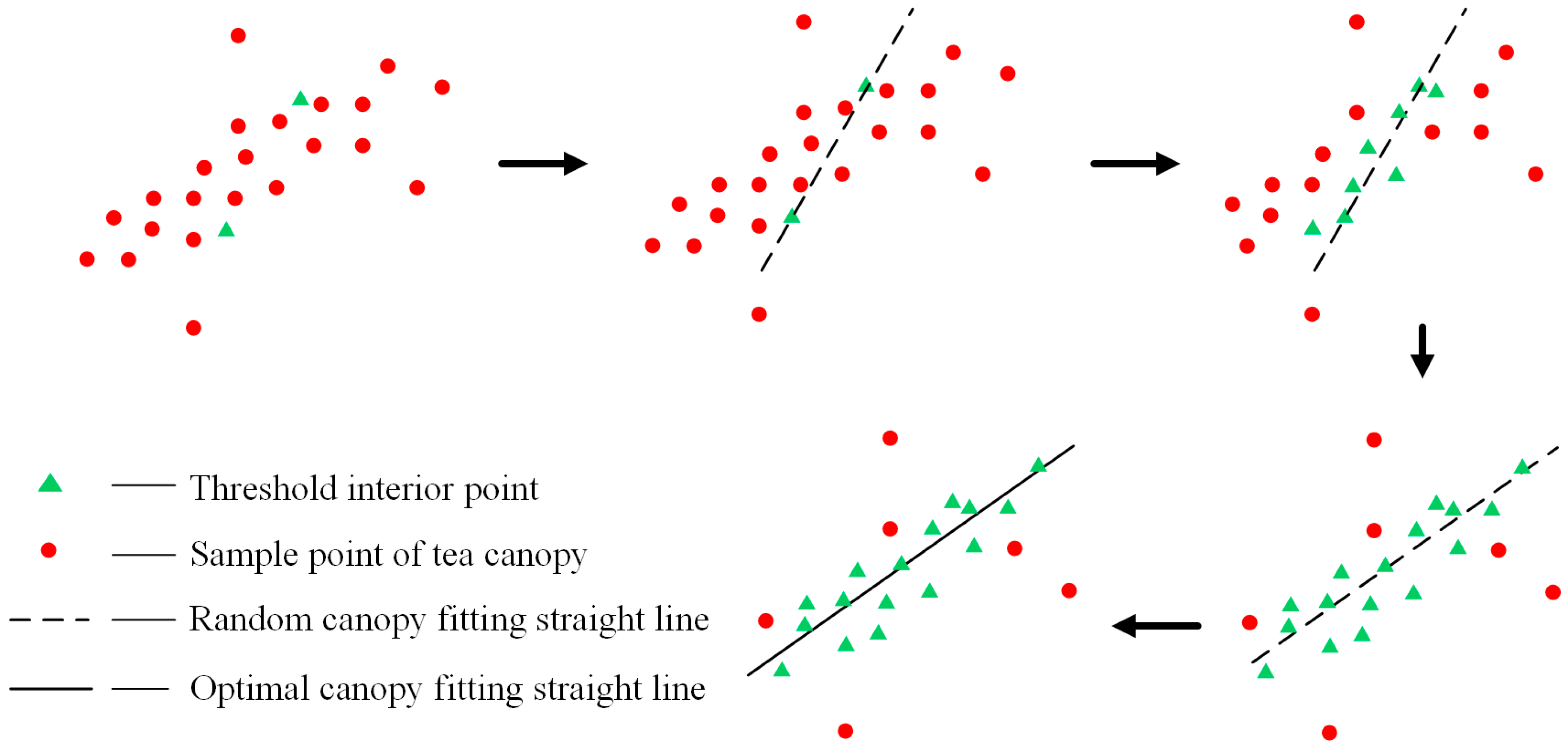
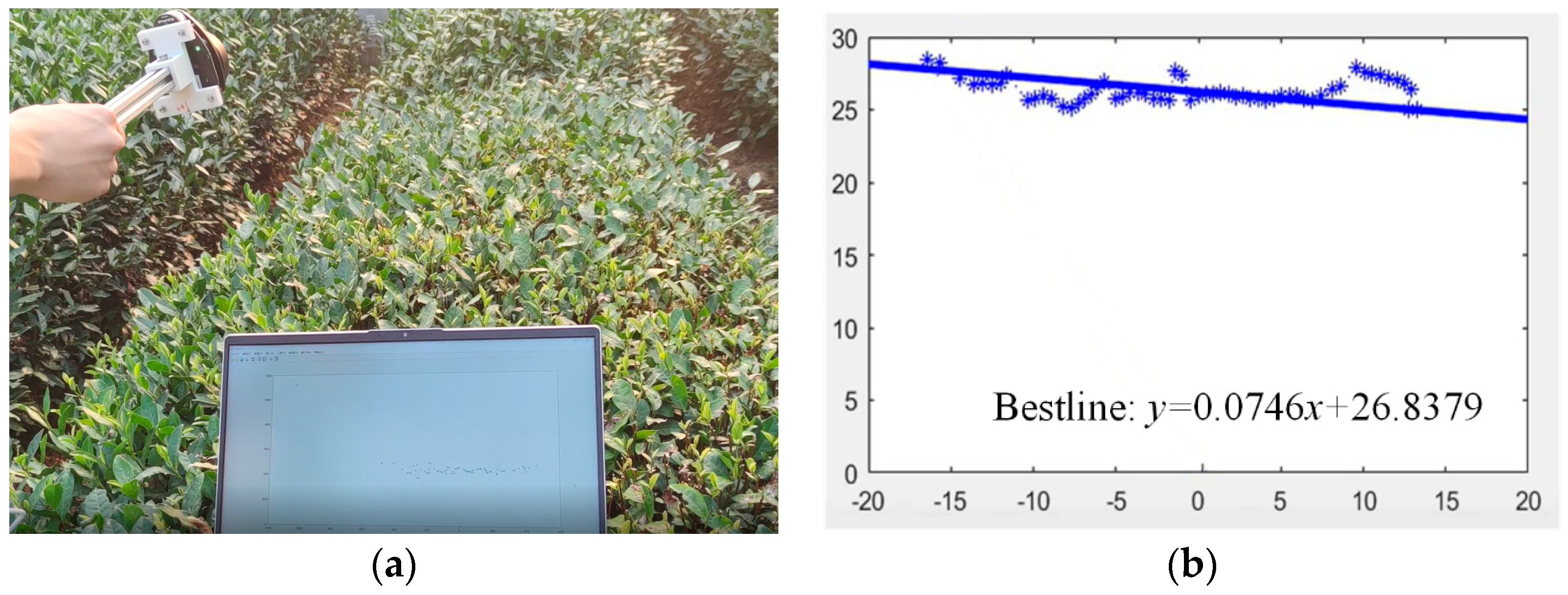
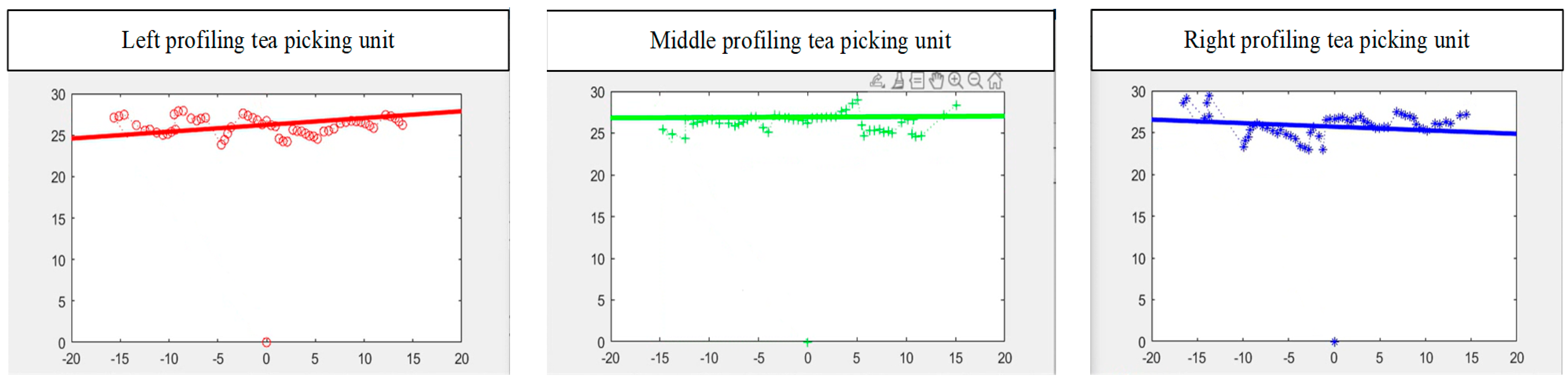
2.2.3. Profiling Height Estimation Based on RANSAC
2.3. Development of Overall Control System
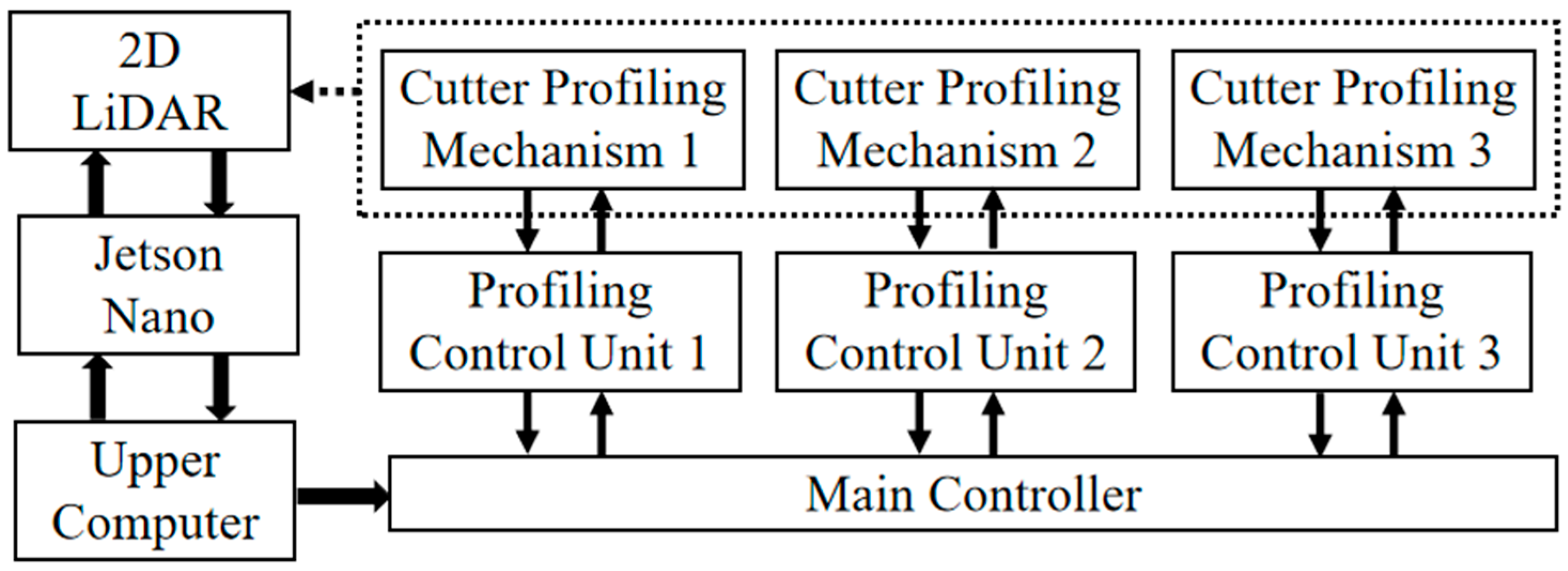
2.3.1. Electric Control System Scheme of the Harvesting Device
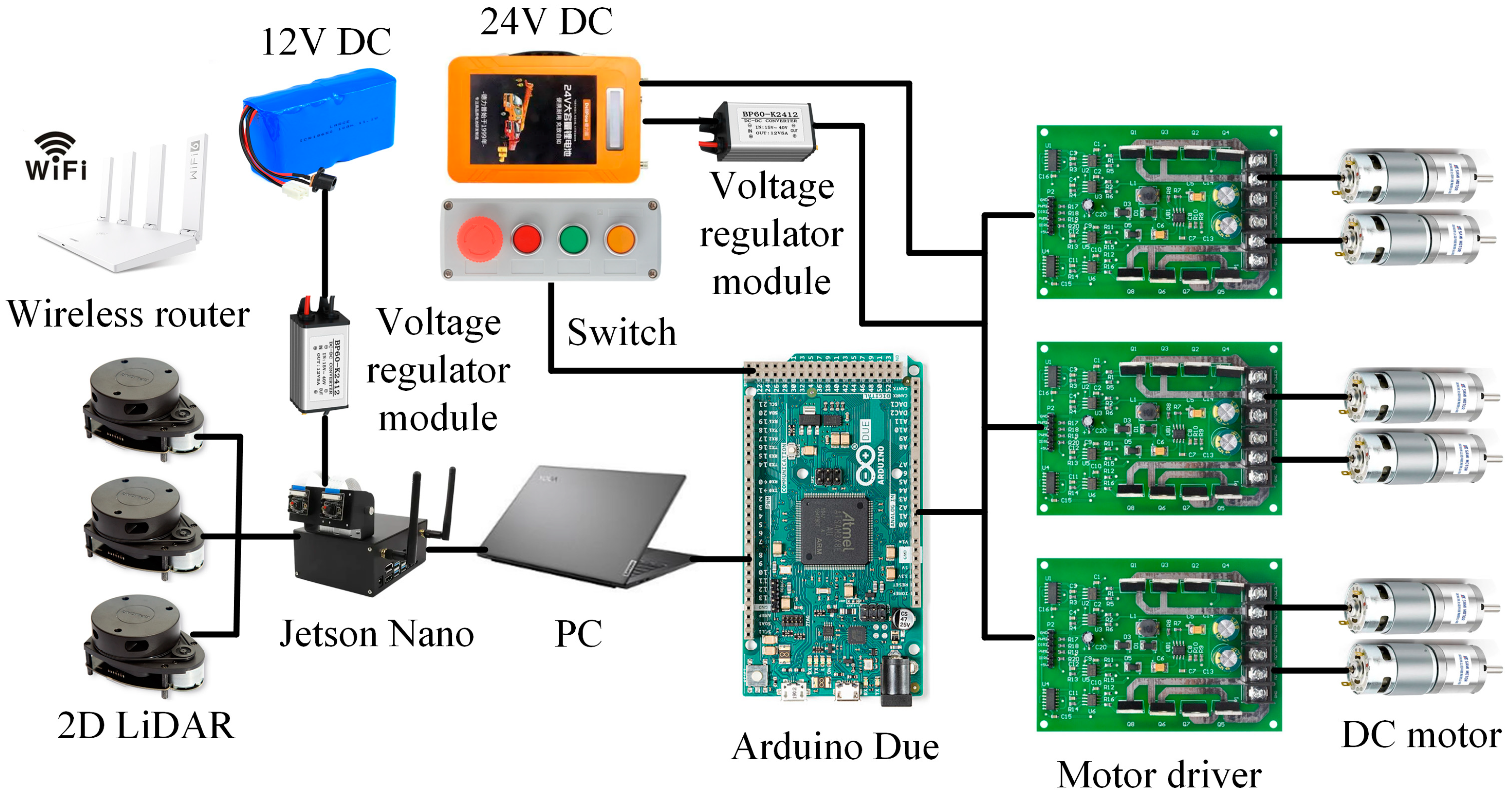
2.3.2. Hardware Composition of Electric Control System
2.3.3. Design of the Control System
2.3.4. Rapid Control Prototype of the Whole Machine
2.4. Field Test
2.4.1. Experiment Site
2.4.2. Test Equipment
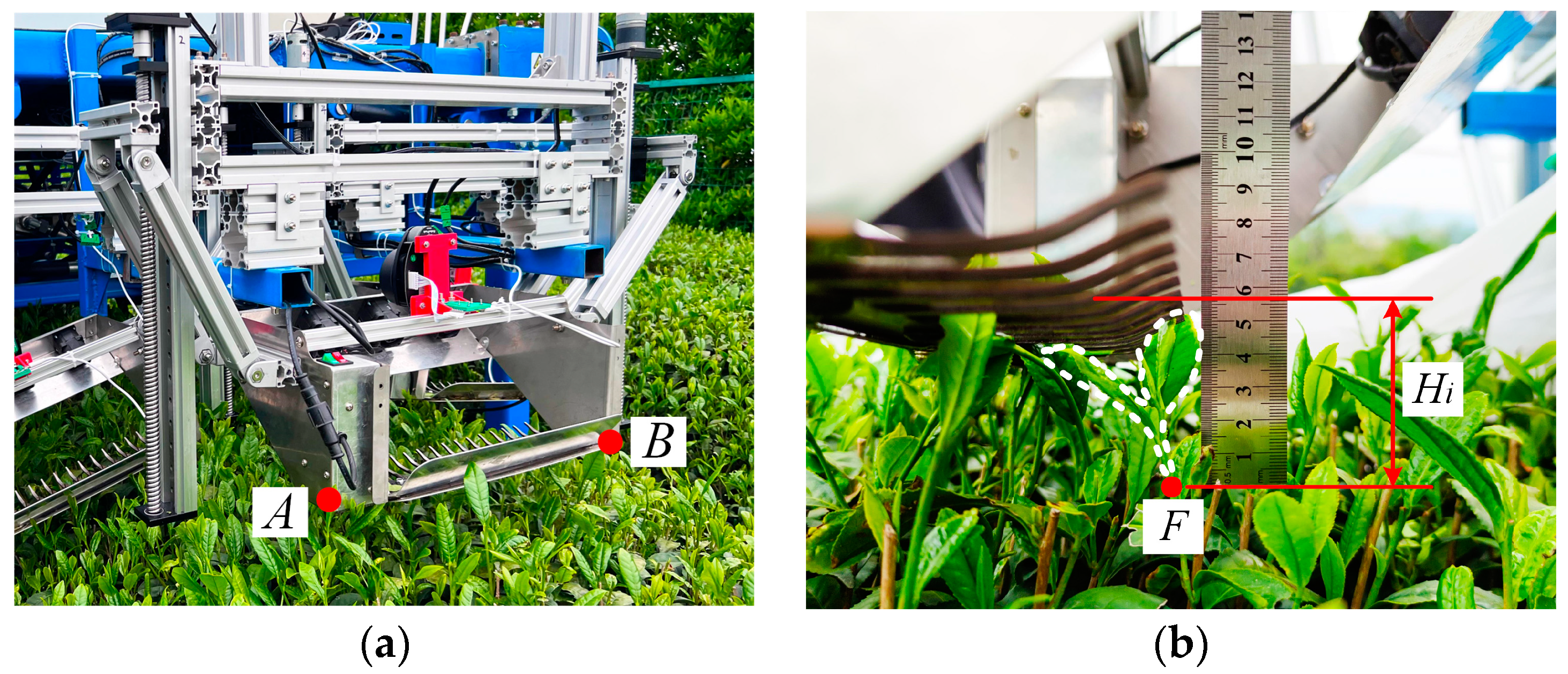
2.4.3. Determination Test of Cutter Height Control
2.4.4. Harvest Test
3. Results and Discussion
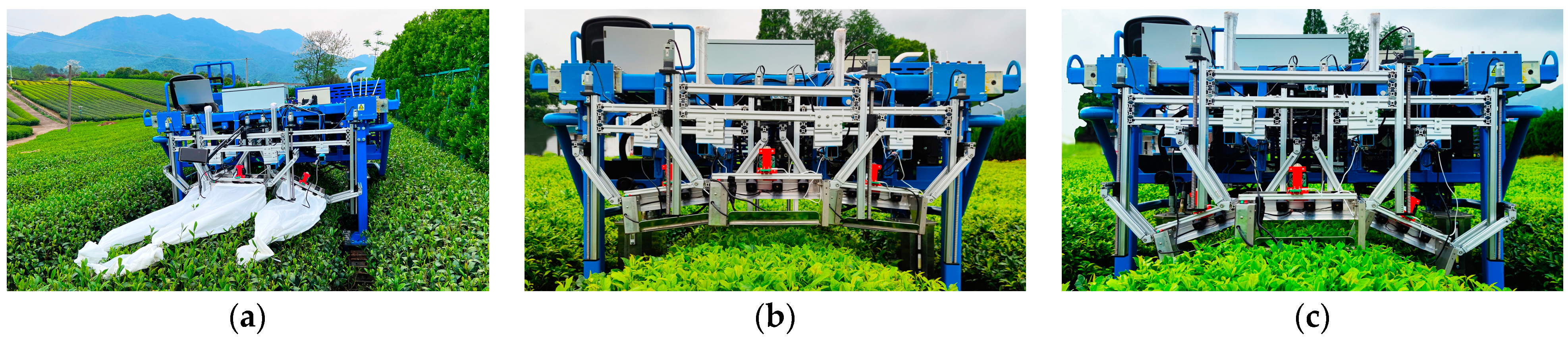
3.1. General Effect of Profiling Tea Harvesting
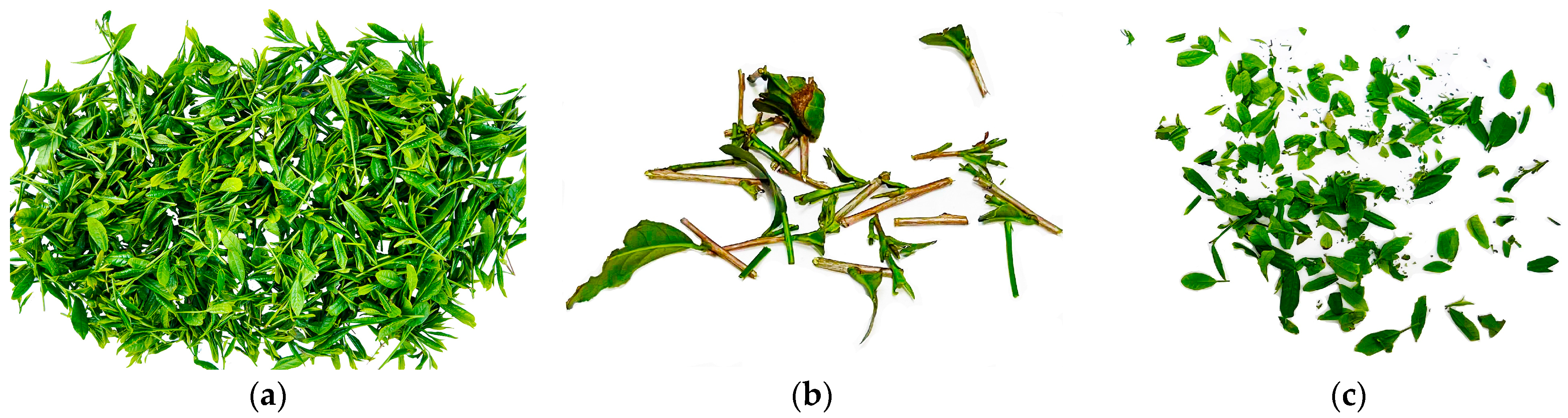
3.2. Evaluation of Index and Measurement of Tea Harvesting Machine Operation Quality
3.3. Distribution of Buds and Leaves
3.4. Evaluation and Analysis of Operation Effect
4. Conclusions
- (1)
- A tea canopy surface profiling method and harvesting device based on LiDAR perception were both proposed and developed, which improved the adaptability of the equipment to the terrain environment and the integrity of fresh leaf harvesting. Meanwhile, based on the scheme of sectional arrangement of multiple groups of PTHUs, a canopy height sensing method for 2D LiDAR perception was proposed. On this basis, a cross-platform communication network was built, and the point cloud fitting of the tea canopy surface and the effective estimation of cutter profiling height were realized through RANSAC. And the rapid control prototype technology was adopted to develop the whole sensing and control system.
- (2)
- This study built a tea harvesting machine prototype and a field test of the whole machine was carried out. And the results showed that the developed profiled tea harvesting device had good performance. The bud leaf integrity rate was 84.64%, the impurity rate was 5.94%, the missing collection rate was 0.30%, the missing harvesting rate was 0.68%, the rate that can be processed into commercial tea was 89.57%, and the young tea shoots with one bud, three leaves and below accounted for 88.34%. All of the results showed that the harvest quality can meet the technical standards of mechanized tea harvesting and the requirements of ordinary tea production. Compared with a traditional commercial tea harvester, the quality of the harvested fresh leaves has also been improved.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, Z.X.; Xue, C.; Ruan, H.G. An Analysis of the Spiritual Core and Value of the Chinese Tea Culture: A Case Study of Etiquette, Customs, Ceremonies and Traditions of Chinese Tea. J. Tea Sci. 2021, 41, 272–284. [Google Scholar]
- Gu, Y.; Liu, J.; Liu, C. The mission of China’s tea industry. Economic Daily, 9 June 2022. [Google Scholar]
- Han, Y.; Xiao, H.R.; Qin, G.M.; Song, Z.Y.; Ding, W.Q.; Zhao, Y. Latest research situations and trends about Tea garden machinery in China. J. Chin. Agric. Mech. 2013, 34, 13–16. [Google Scholar] [CrossRef]
- Erada, J. Traveling Type Tea Leaf Plucking Machine. JP Patent 2008301831, 18 December 2008. [Google Scholar]
- Tang, Y.P.; Han, W.M.; Hu, A.G.; Wang, W.Y. Design and experiment of intelligentized tea-plucking machine for human riding based on machine vision. Trans. Chin. Soc. Agric. Mach. 2016, 47, 15–20. [Google Scholar] [CrossRef]
- Tang, Y.P.; Wang, W.Y.; Zhu, W.; Xiang, Y. Tea ridge identification and navigation method for tea-plucking machine based on machine vision. Trans. Chin. Soc. Agric. Mach. 2016, 47, 45–50. [Google Scholar] [CrossRef]
- Yan, J.J. Optimization Design of Profiling Tea Picking Machine and Research on Coordination with Tea Plantation Management; Anhui Agricultural University: Hefei, China, 2019. [Google Scholar]
- Zhao, R.M.; Bian, X.B.; Chen, J.N.; Dong, C.W.; Wu, C.Y.; Jia, J.M.; Mao, M.; Xiong, Y.S. Development and test for distributed control prototype of the riding profiling tea harvester. J. Tea Sci. 2022, 42, 263–276. [Google Scholar] [CrossRef]
- Diego, A.H.; Ayush, K.; Aditya, S.; Lakesh, K. Yield and plant height predictions of irrigated maize through unmanned aerial vehicle in North Florida. Comput. Electron. Agric. 2023, 215, 108374. [Google Scholar] [CrossRef]
- Francisco, R.; Rafael, D.R.; Richard, L.S.; Daniele, Z. A novel simulation model to predict photosynthetic active radiation interception in micro-irrigated citrus production orchards based on tree spacing, canopy geometry, and row orientation. Comput. Electron. Agric. 2023, 212, 108062. [Google Scholar] [CrossRef]
- Mahmud, S.; Zahid, A.; He, L.; Choi, D.; Krawczyk, G.; Zhu, H.; Heinemann, P. Development of a LiDAR-guided section-based tree canopy density measurement system for precision spray applications. Comput. Electron. Agric. 2021, 182, 106053. [Google Scholar] [CrossRef]
- Liu, Y.C.; Wang, C.; Xi, X.H.; Wang, J.L.; Zhang, H.Q. A pits removal method for LiDAR CHM based on distance weighting and canopy control. Sci. Surv. Mapp. 2021, 46, 108–113. [Google Scholar] [CrossRef]
- Nidamanuri, R.R.; Jayakumari, R.; Ramiya, A.M.; Astor, T.; Wachendorf, M.; Buerkert, A. High-resolution multispectral imagery and LiDAR point cloud fusion for the discrimination and biophysical characterisation of vegetable crops at different levels of nitrogen. Biosyst. Eng. 2022, 222, 177–195. [Google Scholar] [CrossRef]
- Zhang, L.; Grift, T.E. A LIDAR-based crop height measurement system for Miscanthus giganteus. Comput. Electron. Agric. 2012, 85, 70–76. [Google Scholar] [CrossRef]
- Qiao, B.Y.; He, X.K.; Wang, Z.C.; Han, L.; Liu, W.H.; Dong, X.; Liang, W.P. Development of variable-rate spraying system for high clearance wide boom sprayer based on LiDAR scanning. Trans. Chin. Soc. Agric. Eng. 2020, 36, 89–95. [Google Scholar] [CrossRef]
- Cheraiet, A.; Naud, O.; Carra, M.; Codis, S.; Lebeau, F.; Taylor, J. Predicting the site-specific distribution of agrochemical spray deposition in vineyards at multiple phenological stages using 2D LiDAR-based primary canopy attributes. Comput. Electron. Agric. 2021, 189, 106402. [Google Scholar] [CrossRef]
- Blanquart, J.-E.; Sirignano, E.; Lenaerts, B.; Saeys, W. Online crop height and density estimation in grain fields using LiDAR. Biosyst. Eng. 2020, 198, 1–14. [Google Scholar] [CrossRef]
- Eizentals, P.; Oka, K. 3D pose estimation of green pepper fruit for automated harvesting. Comput. Electron. Agric. 2016, 128, 127–140. [Google Scholar] [CrossRef]
- Gangadharan, S.; Burks, T.F.; Schueller, J.K. A comparison of approaches for citrus canopy profile generation using ultrasonic and Leddar sensors. Comput. Electron. Agric. 2019, 156, 71–83. [Google Scholar] [CrossRef]
- Liu, T.; Kang, H.; Chen, C. ORB-Livox: A real-time dynamic system for fruit detection and localization. Comput. Electron. Agric. 2023, 209, 107834. [Google Scholar] [CrossRef]
- Cheng, M.; Cai, Z.; Ning, W.; Yuan, H. System design for peanut canopy height information acquisition based on LiDAR. Trans. Chin. Soc. Agric. Eng. 2019, 35, 180–187. [Google Scholar] [CrossRef]
- Zhang, H.Q.; Liu, K.H.; Zheng, F.; Chen, J.L.; Chen, S. Research on plant height measurement system based on two-dimensional LiDAR. Electron. Meas. Technol. 2021, 44, 97–103. [Google Scholar] [CrossRef]
- Abdi, O.; Uusitalo, J.; Pietarinen, J.; Lajunen, A. Evaluation of Forest Features Determining GNSS Positioning Accuracy of a Novel Low-Cost, Mobile RTK System Using LiDAR and TreeNet. Remote Sens. 2022, 14, 2856. [Google Scholar] [CrossRef]
- Liu, J.C.; Li, D.; Weng, X.W. Research on Mobile Robot SLAM Based on Laser Information. Autom. Instrum. 2018, 33, 43–47. [Google Scholar] [CrossRef]
- Zhao, J.W.; Zhang, H.J.; Wang, H.Y.; Gao, X.Q. Study on Building Indoor Environment Map with Laser Radar. Mach. Des. Manuf. 2017, 5, 135–137. [Google Scholar] [CrossRef]
- Bai, K.; Wang, L. Cloud Platform Simulation of Picking Robot Intelligent Control System Based on Simulink. J. Agric. Mech. Res. 2021, 43, 225–229. [Google Scholar] [CrossRef]
- Ghahremani, M.; Williams, K.; Corke, F.; Tiddeman, B.; Liu, Y.; Wang, X.; Doonan, J.H. Direct and accurate feature extraction from 3D point clouds of plants using RANSAC. Comput. Electron. Agric. 2021, 187, 106240. [Google Scholar] [CrossRef]
- Yang, L.X.; Wang, T.T.; He, X. Crop Row Extraction Based on Random Sampling Consistency Algorithm (RANSAC). Jiangsu Agric. Sci. 2017, 45, 195–197. [Google Scholar] [CrossRef]
- Xie, Y.D.; Long, Z.Q. A high-speed nonlinear discrete tracking-differentiator with high precision. Control Theory Appl. 2009, 26, 127–132. [Google Scholar]
- Fang, Z.; Zhang, Q.C.; Qi, Y.C. A Rapid Control Prototyping System Based on DSP. J. Northeast. Univ. (Nat. Sci.) 2009, 30, 1069–1073. [Google Scholar]
- Xia, Z.X.; Dai, W.; He, D.Y.; Ma, X.P. Design and Development of Rapid Control Prototype System Oriented Towards Desktop Robot Arm. Control Eng. China 2021, 28, 84–92. [Google Scholar] [CrossRef]
- Han, Y.; Xiao, H.; Song, Z.; Ding, W.; Mei, S. Design and experiments of 4CJ-1200 self-propelled tea plucking machine. Int. J. Agric. Biol. Eng. 2021, 14, 75–84. [Google Scholar] [CrossRef]
- Wang, P.; Yi, W.Y.; Xiong, C.G.; Cheng, F.P.; Deng, J.; Zhou, Y.J.; Geng, Y.; Wu, J. Design and test of 4CJZ-1000 Self-propelled tea picker. J. Southwest Univ. (Nat. Sci. Ed.) 2022, 44, 228–233. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Group (i) | /mm | Hi/mm | Test Group (i) | Ti/mm | Hi/mm |
|---|---|---|---|---|---|
| 1 | 28 | 57 | 6 | 29 | 54 |
| 2 | 22 | 49 | 7 | 12 | 46 |
| 3 | 21 | 55 | 8 | 24 | 56 |
| 4 | 26 | 52 | 9 | 27 | 55 |
| 5 | 19 | 51 | 10 | 18 | 53 |
| Index | 1 | 2 | 3 | 4 | 5 | Average |
|---|---|---|---|---|---|---|
| m (g) | 1220 | 1372 | 1185 | 1436 | 1268 | 1296.2 |
| m1 (g) | 308 | 304 | 309 | 307 | 302 | 306.0 |
| m2 (g) | 292 | 289 | 284 | 289 | 285 | 287.8 |
| m3 (g) | 253 | 240 | 243 | 235 | 247 | 243.6 |
| m4 (g) | 24 | 10 | 19 | 11 | 7 | 14.2 |
| m5 (g) | 15 | 39 | 22 | 43 | 31 | 30.0 |
| m6 (g) | 10 | 12 | 16 | 14 | 12 | 12.8 |
| m7 (g) | 6 | 3 | 9 | 4 | 5 | 5.4 |
| BLIR (%) | 86.64 | 83.04 | 85.56 | 81.31 | 86.67 | 84.64 |
| IR (%) | 5.19 | 4.93 | 8.09 | 5.86 | 5.63 | 5.94 |
| MR (%) | 94.86 | 86.51 | 92.25 | 85.12 | 89.12 | 89.57 |
| Index | Group 1 | Group 2 | Group 3 | Group 4 | Group 5 | Average |
|---|---|---|---|---|---|---|
| Weight of all harvested object m (g) | 1220 | 1372 | 1185 | 1436 | 1268 | 1296.2 |
| Working distance L0 (m) | 10.1 | 10.3 | 9.9 | 10.3 | 10.2 | 10.16 |
| Weight of scattered fresh leaves w1 (g) | 2 | 4 | 2 | 5 | 7 | 4 |
| Weight of secondary auxiliary harvested w2 (g) | 9 | 11 | 13 | 7 | 4 | 8.8 |
| MCR (%) | 0.164 | 0.291 | 0.168 | 0.347 | 0.549 | 0.304 |
| MHR T2 (%) | 0.731 | 0.793 | 1.083 | 0.483 | 0.313 | 0.681 |
| Average fresh leaf length (cm) | 6.33 | 7.28 | 6.19 | 7.84 | 8.03 | 7.13 |
| Index | One Bud and One Leaf | One Bud and Two Leaves | One Bud and Three Leaves | One Bud, Four Leaves and above | Total |
|---|---|---|---|---|---|
| Quantity (pcs.) | 53 | 144 | 197 | 52 | 446 |
| Proportion (%) | 11.88 | 32.29 | 44.17 | 11.66 | 100 |
| Index | Requirements of Quality Indicators | Average Parameters of Our Machine | Meet the Requirements? |
|---|---|---|---|
| BLIR (%) | ≥70 | 84.64 | Yes |
| MCR (%) | ≤1.5 | 0.30 | Yes |
| MHR (%) | ≤2.0 | 0.68 | Yes |
| Brand of Tea Picker | Type | BLIR (%) | MCR (%) | MHR (%) |
|---|---|---|---|---|
| HengJun4C-60 (Zhejiang Anqidi Power Machinery Co., Ltd., Taizhou, China) | Single | ≈70% | ≈1% | ≈1% |
| YaSheng4CS-120P (Linyi Yasheng Electromechanical Co., Ltd., Linyi, China) | Double | ≈78% | ≈1% | ≈1% |
| Kawasaki KJ4N (Zhejiang Kawasaki Tea Industry Machinery Co., Ltd., Hangzhou, China) | Riding | ≈80% | ≈1% | ≈1% |
| Ordinary tea harvesting–pruning machine (Zhejiang Jiuqi Machinery Co., Ltd., Jinhua, China) | Riding | 81% | 0.82% | 0.77% |
| 4CJ-1200 (Nanjing Agricultural Mechanization Research Institute, Nanjing, China) | Riding | 78.26% | ≈1% | 0.87% |
| Profiling tea harvester (Ultrasonic) (Zhejiang sci-tech university, Hangzhou, China) | Riding | 82.6% | ≈1% | ≈1% |
| Profiling tea harvester (LiDAR) | Riding | 84.64% | 0.30% | 0.68% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huan, X.; Wu, M.; Bian, X.; Jia, J.; Kang, C.; Wu, C.; Zhao, R.; Chen, J. Design and Experiment of Ordinary Tea Profiling Harvesting Device Based on Light Detection and Ranging Perception. Agriculture 2024, 14, 1147. https://doi.org/10.3390/agriculture14071147
Huan X, Wu M, Bian X, Jia J, Kang C, Wu C, Zhao R, Chen J. Design and Experiment of Ordinary Tea Profiling Harvesting Device Based on Light Detection and Ranging Perception. Agriculture. 2024; 14(7):1147. https://doi.org/10.3390/agriculture14071147
Chicago/Turabian StyleHuan, Xiaolong, Min Wu, Xianbing Bian, Jiangming Jia, Chenchen Kang, Chuanyu Wu, Runmao Zhao, and Jianneng Chen. 2024. "Design and Experiment of Ordinary Tea Profiling Harvesting Device Based on Light Detection and Ranging Perception" Agriculture 14, no. 7: 1147. https://doi.org/10.3390/agriculture14071147