
Classification, Advanced Technologies, and Typical Applications of End-Effector for Fruit and Vegetable Picking Robots

 ,
,
Abstract
:1. Introduction
2. Development, Classification, and Advanced Technologies of End-Effector for Fruit and Vegetable-Harvesting Robots
2.1. Development History of End-Effector
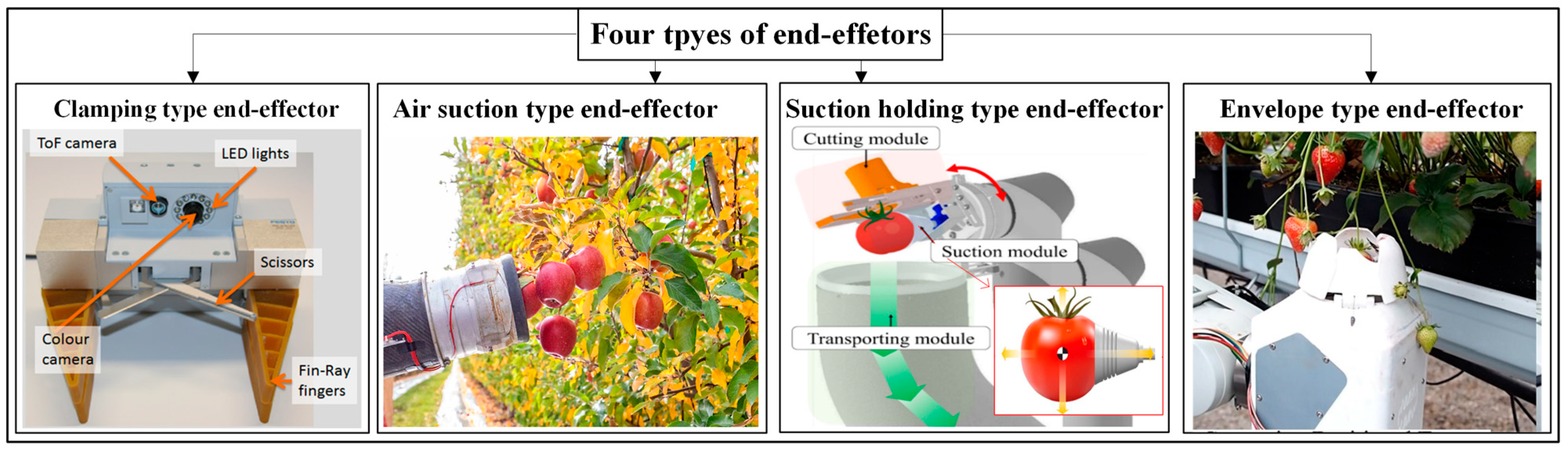
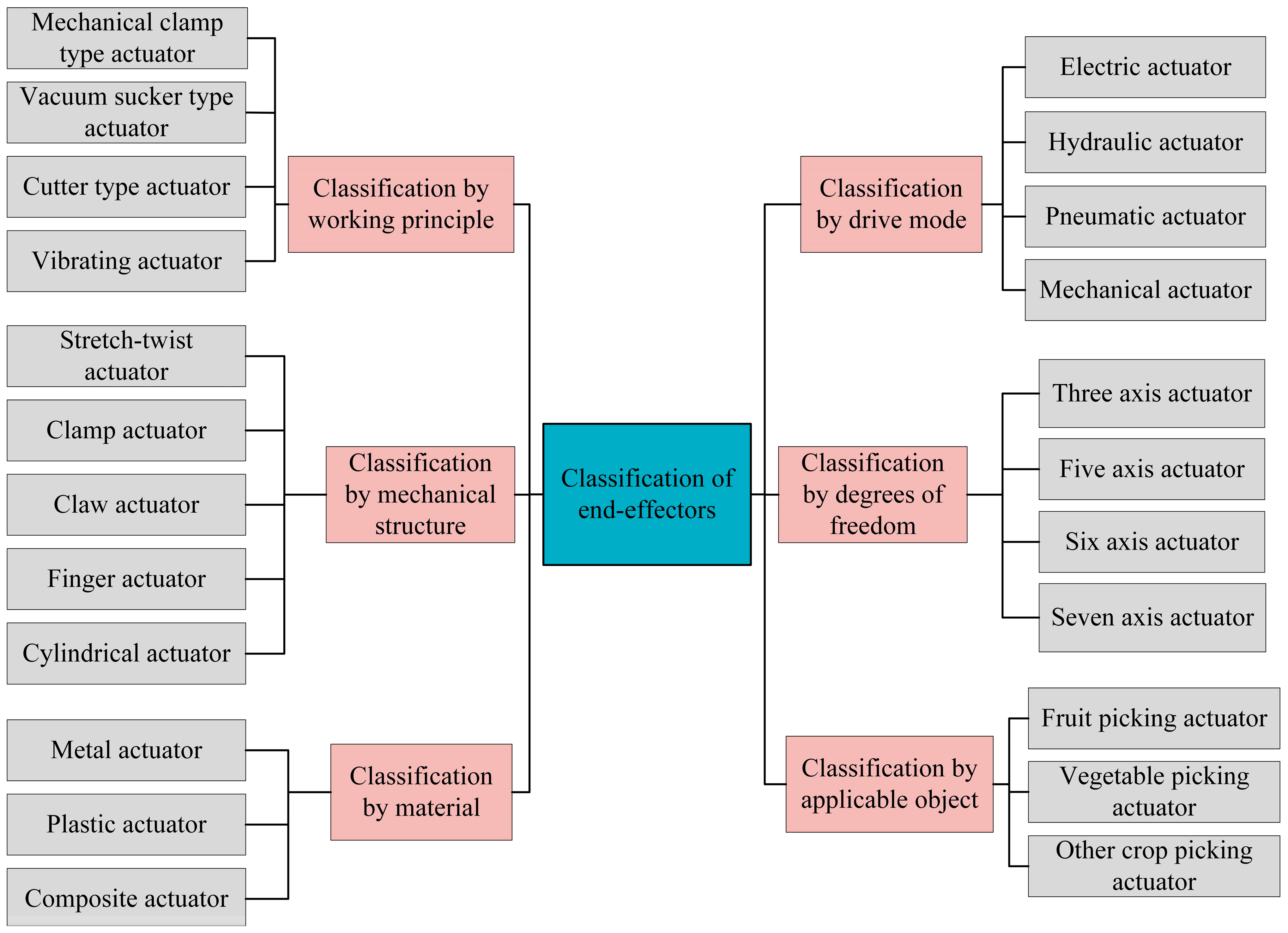
2.2. Classification of End-Effectors
2.2.1. Clamping Type End-Effector
2.2.2. Air-Suction-Type End-Effector
2.2.3. Suction-Holding-Type End-Effector
2.2.4. Envelope-Type End-Effector
3. Advanced Technology for End-Effectors
3.1. Structural Design
- (1)
- Analysis of target requirements and mechanical characteristics. The demand analysis refers to the method of market research used to determine the picked objects, consider the needs of the market economy, and design the end-effector to ensure that it meets those needs. Target mechanical characteristics analysis refers to the mechanical tests performed on the pressure, shear, and torque resistance of the harvested object or fruit stem [43];
- (2)
- End-effector structure and cutting scheme design. The structural design points to selecting the appropriate type of end-effector for the picking object. When the strength of the fruit stem of the picking object is low, the fruit stem should be selected as the working object. When the fruit is large, bright, and easy to identify, it should be selected as the working object. Cutting-plan design refers to when the strength of the stem is high and the strength of the fruit is low, the blade should be used to cut. When the strength of the stem is low and the strength of the fruit is high, anthropomorphic hand-cutting should be selected [19,83];
- (3)
- Comprehensive design and mechanical analysis. The comprehensive design includes the choice of freedom, drive mode, and the design of the transmission chain, which should be analyzed and designed according to the size and shape of the operating object. Mechanical analysis is the use of analytical and experimental methods of mechanical synthesis of the manipulator to determine the working range, sensitivity, and size of the end-effector [84];
- (4)
- Hardware and software design. Research and select hardware devices, such as plastics, metals, motors, tools, sensors, and batteries. Others include the design of hardware connections, mounting, and driving, as well as control electronic circuits (schematics and printed circuit board (PCB) design). Then, in order to effectively control the end-effector system, it is necessary to develop C++ or Python 3.0-based driver algorithms, navigation, and control strategies [85];
- (5)
- System simulation and testing. Design the necessary components with known computer-aided design (CAD-2016) software applications. At the same time, a virtual model of the end-effector system can be constructed using the robot operating system (ROS), and the performance of the end-effector can be evaluated in the Gazebo simulation environment. Test the effectiveness of the end-effector through the test procedure, including recording applied forces, payloads, pressure control, energy requirements, control algorithm performance, etc. Measure the selected performance indicators (damage rate, picking time, etc.). Finally, by optimizing and fine-tuning the design of the end-effector, re-testing, and measuring the performance indicators, it is determined whether it is considered to be potentially usable.
3.2. Steps for End-Effector Grasping
3.3. Artificial Intelligence (AI) Technology for End-Effector
3.4. Additional Sensors for the End-Effector
3.4.1. Vision Sensors
3.4.2. Force/Torque Sensor
3.4.3. Tactile Sensor
3.5. New Materials for End-Effectors
- (1)
- In the initial development stage of agricultural picking robots, the end-effectors mainly adopt rigid structures, such as mechanical grippers. Although these rigid structures can complete basic operating tasks, they have problems with the risk of damage and insufficient adaptability to weak, fragile, or deformed crops. Due to difficulties in using materials, in the initial stage, fruit-picking robots’ identification and action sites were mostly at the fruit stems. The fruit stems are not easily damaged by clamping, but the identification is complex, and the efficiency could be higher. Bulanon et al. proposed an apple-picking end-effector made of aluminum [108]. During the picking process, the robot pinches the fruit stem with two fingers to pick. Generally, mechanical rigid structures are widely used in crops that are not easily affected by rigid materials. Ali Roshanianfard et al. have invented an end-effector for harvesting pumpkins. This end-effector has an electrically driven and internal impact gripping mode with a five-finger anthropomorphic manipulator that can be used to pick heavy crops with radii ranging from 76.2 to 265 mm [109]. This rigid material multi-finger manipulator has the advantage of harvesting a large mass of produce compared to soft manipulators;
- (2)
- With the development of soft robot technology, people have begun to explore the application of soft materials (such as silicone, foam plastic, etc.) in the end-effectors of agricultural robots. Soft materials are soft, deformable, and adaptable and can better adapt to irregular crop shapes and terrains, reducing the risk of crop damage. Using soft grippers to grip crops provides better grip and protection. The current research on agricultural picking robots includes tomato-picking mechanisms [110], apple-picking end-effectors [111], etc.;
- (3)
- As scholars conduct in-depth research on soft robots, people have begun to explore more complex soft structure designs. These structures are elastic and deformable, allowing the robot to better adapt to the shape and characteristics of various crops. For example, materials with adjustable hardness and elasticity can deform crops using motor drive or pneumatic methods to adjust to different shapes of crops and provide better gripping and operation capabilities. Zhou et al. proposed a flexible picking mechanism based on tomato characteristics [112]. The flexible clamp uses a fluid elastic material as an end-effector to realize the clamping action of tomatoes by adjusting the inflation pressure. Under static conditions, the optimized design of the gripper can successfully grip tomatoes 100 percent. Furthermore, by integrating advanced sensor technology and control systems, robots can better perceive crops’ shape, position, and status and achieve precise control and operation.
4. Typical Application of End-Effector in Fruit and Vegetable Picking
4.1. Typical Fruit Picking
4.1.1. Apples

4.1.2. Citrus and Oranges

4.1.3. Strawberries
4.1.4. Cherry Tomatoes
4.2. Typical Vegetable Picking
4.2.1. Sweet Peppers
4.2.2. Eggplants
4.2.3. Pumpkins
4.2.4. Cucumbers
4.3. Other Special Crops
4.3.1. Mushrooms
4.3.2. Tea Leaves
5. Discussion on Challenges and Future Trends
- (1)
- Lightweight, adaptive end-effectors are the primary potential development trend. In the future, the design of end-effectors will be lightweight on the one hand and use an under-actuated structure to reduce the mass of the end-effector. On the other hand, more emphasis will be placed on flexibility and deformability to adapt to different forms of fruits and vegetables while reducing damage to the plants, improving picking efficiency and quality;
- (2)
- The research and development of bionic manipulators is a popular research trend. Drawing on the characteristics and structures of organisms in nature, robotic manipulators with similar structures and functions are designed and developed. This R&D method aims to realize a more flexible, intelligent, and efficient mechanical system, and it can also solve the problem that traditional manipulators have limited applications in complex environments;
- (3)
- Fusion of multi-sensor technologies. At present, some advanced end-effectors have begun to integrate simple visual and tactile sensors to achieve more accurate gripping action. The future end-effector integrates visual, mechanical, tactile, and even olfactory sensors, which will be equipped with more accurate sensing ability and will be able to identify the location, shape, and ripeness of fruits and vegetables in real time to achieve intelligentization;
- (4)
- A more intelligent control system: People will study perception, decision-making, and human–machine collaboration methods based on artificial intelligence and machine learning and develop intelligent terminal control algorithms suitable for selective harvesting scenarios, which can adjust picking strategies according to the real-time environment and fruit and vegetable morphology and gradually achieve strong adaptability and high efficiency harvested autonomously;
- (5)
- Design of flexible end-effector. The current design of an end-effector is mostly based on rigid materials, although it has durability and reliability. However, there are limitations in the face of damage-prone crops, the design of a flexible end-effector will improve the limitations of rigid structure. The combination of flexible materials and flexible end-effectors is the future trend, which can make up for the error of excessive stress brought by traditional mechanical materials and reduce the risk of damage;
- (6)
- Design for modularity and reconfigurability. The current end-effector design has been able to realize the basic gripping and picking functions, mostly using mechanical fingers or pneumatic devices, but it mainly relies on the fixed form of the components for gripping. The scope of application is relatively limited; modularity and reconfigurability of the trend will make the current design not universal to become more compatible and to enhance the functionality of the equipment to expand and adapt to market capabilities.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Berners-Lee, M.; Kennelly, C.; Watson, R.; Hewitt, C. Current global food production is sufficient to meet human nutritional needs in 2050 provided there is radical societal adaptation. Elem. Sci. Anthr. 2018, 6, 52. [Google Scholar] [CrossRef]
- Silveira, d.F.; Lermen, F.H.; Amaral, F.G. An overview of agriculture 4.0 development: Systematic review of descriptions, technologies, barriers, advantages, and disadvantages. Comput. Electron. Agric. 2021, 189, 106405. [Google Scholar] [CrossRef]
- Vasconez, J.P.; Kantor, G.A.; Cheein, F.A.A. Human–robot interaction in agriculture: A survey and current challenges. Biosyst. Eng. 2019, 179, 35–48. [Google Scholar] [CrossRef]
- Oliveira, L.F.; Moreira, A.P.; Silva, M.F. Advances in agriculture robotics: A state-of-the-art review and challenges ahead. Robotics 2021, 10, 52. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, X.; Shu, L.; Hancke, G.P.; Abu-Mahfouz, A.M. From Industry 4.0 to Agriculture 4.0: Current status, enabling technologies, and research challenges. IEEE Trans. Ind. Inform. 2020, 17, 4322–4334. [Google Scholar] [CrossRef]
- Yang, Q.; Du, X.; Wang, Z.; Meng, Z.; Ma, Z.; Zhang, Q. A review of core agricultural robot technologies for crop productions. Comput. Electron. Agric. 2023, 206, 107701. [Google Scholar] [CrossRef]
- Guo, B. Review of current mechanical design in agricultural end effector. J. Phys. Conf. Ser. 2023, 2634, 012016. [Google Scholar] [CrossRef]
- Jiang, H.; Sun, X.; Fang, W.; Fu, L.; Li, R.; Cheein, F.A.; Majeed, Y. Thin wire segmentation and reconstruction based on a novel image overlap-partitioning and stitching algorithm in apple fruiting wall architecture for robotic picking. Comput. Electron. Agric. 2023, 209, 107840. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft robotic grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef]
- Meshram, A.T.; Vanalkar, A.V.; Kalambe, K.B.; Badar, A.M. Pesticide spraying robot for precision agriculture: A categorical literature review and future trends. J. Field Robot. 2022, 39, 153–171. [Google Scholar] [CrossRef]
- Xie, D.; Chen, L.; Liu, L.; Chen, L.; Wang, H. Actuators and sensors for application in agricultural robots: A review. Machines 2022, 10, 913. [Google Scholar] [CrossRef]
- Wang, Z.; Xun, Y.; Wang, Y.; Yang, Q. Review of smart robots for fruit and vegetable picking in agriculture. Int. J. Agric. Biol. Eng. 2022, 15, 33–54. [Google Scholar]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Vrochidou, E.; Tsakalidou, V.N.; Kalathas, I.; Gkrimpizis, T.; Pachidis, T.; Kaburlasos, V.G. An overview of end effectors in agricultural robotic harvesting systems. Agriculture 2022, 12, 1240. [Google Scholar] [CrossRef]
- Navas, E.; Fernández, R.; Sepúlveda, D.; Armada, M.; Santos, G.-d.P. Soft grippers for automatic crop harvesting: A review. Sensors 2021, 21, 2689. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, X.; Wang, C. A review on structural development and recognition–localization methods for end-effector of fruit–vegetable picking robots. Int. J. Adv. Robot. Syst. 2022, 19, 17298806221104906. [Google Scholar] [CrossRef]
- Zhang, K.; Lammers, K.; Chu, P.; Li, Z.; Lu, R. System design and control of an apple harvesting robot. Mechatronics 2021, 79, 102644. [Google Scholar] [CrossRef]
- Park, Y.; Seol, J.; Pak, J.; Jo, Y.; Jun, J.; Son, H.I. A novel end-effector for a fruit and vegetable harvesting robot: Mechanism and field experiment. Precis. Agric. 2023, 24, 948–970. [Google Scholar] [CrossRef]
- Xu, L.; Liu, X.; Zhang, K.; Xing, X.J.; Yuan, Y.Q.; Chen, C.J.; Yu, Y.C. Design and test of end-effector for navel orange picking robot. Trans. Chin. Soc. Agric. Eng. 2018, 34, 53–61. [Google Scholar]
- Xiong, Y.; Peng, C.; Grimstad, L.; From, P.J.; Isler, V. Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper. Comput. Electron. Agric. 2019, 157, 392–402. [Google Scholar] [CrossRef]
- Vrochidou, E.; Tziridis, K.; Nikolaou, A.; Kalampokas, T.; Papakostas, G.A.; Pachidis, T.P.; Mamalis, S.; Koundouras, S.; Kaburlasos, V.G. An autonomous grape-harvester robot: Integrated system architecture. Electronics 2021, 10, 1056. [Google Scholar] [CrossRef]
- Edan, Y.; Miles, G.E. Systems engineering of agricultural robot design. IEEE Trans. Syst. Man Cybern. 1994, 24, 1259–1265. [Google Scholar] [CrossRef]
- Shamshiri, R.R.; Weltzien, C.; Hameed, I.A.; J Yule, I.; E Grift, T.; Balasundram, S.K.; Pitonakova, L.; Desa, A.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1–14. [Google Scholar] [CrossRef]
- Pool, T.; Harrell, R. An end-effector for robotic removal of citrus from the tree. Trans. ASAE 1991, 34, 373–378. [Google Scholar] [CrossRef]
- Kondo, N.; Shibano, Y.; Fujiura, T.; Mohri, K.; Monta, M.; Yamada, H. End-effectors for petty-tomato harvesting robot. Greenh. Environ. Control Autom. 1994, 399, 239–246. [Google Scholar] [CrossRef]
- Monta, M.; Kondo, N.; Ting, K. End-effectors for tomato harvesting robot. In Artificial Intelligence for Biology and Agriculture; Springer: Berlin/Heidelberg, Germany, 1998; pp. 1–25. [Google Scholar]
- Arima, S.; Kondo, N.; Nakamura, H. Development of robotic system for cucumber harvesting. Jpn. Agric. Res. Q. 1996, 30, 233–238. [Google Scholar]
- Harrell, R.; Adsit, P.D.; Munilla, R.; Slaughter, D. Robotic picking of citrus. Robotica 1990, 8, 269–278. [Google Scholar] [CrossRef]
- Kondo, N.; Monta, M.; Arima, S. Strawberry harvesting robot on hydroponic system. IFAC Proc. Vol. 1998, 31, 181–185. [Google Scholar] [CrossRef]
- Hayashi, S.; Ganno, K.; Ishi, Y.; Tanaka, I. Development of a Harvesting End-Effector for Eggplants. Shokubutsu Kojo Gakkaishi 2001, 13, 97–103. [Google Scholar] [CrossRef]
- Baeten, J.; Donné, K.; Boedrij, S.; Beckers, W.; Claesen, E. Autonomous Fruit Picking Machine: A Robotic Apple Harvester; Springer: Berlin/Heidelberg, Germany, 2008; pp. 531–539. [Google Scholar]
- Ling, P.P.; Ehsani, R.; Ting, K.C.; Chi, Y.T.; Ramalingam, N.; Klingman, M.H.; Draper, C. Sensing and end-effector for a robotic tomato harvester. In Proceedings of the Event ASAE Annual International Meeting 2004, Ottawa, ON, Canada, 1–4 August 2004. [Google Scholar]
- Tanigaki, K.; Fujiura, T.; Akase, A.; Imagawa, J. Cherry-harvesting robot. Comput. Electron. Agric. 2008, 63, 65–72. [Google Scholar] [CrossRef]
- Kondo, N. Fruit grading robot. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Kobe, Japan, 20–24 July 2003. [Google Scholar]
- Muscato, G.; Prestifilippo, M.; Abbate, N.; Rizzuto, I. A prototype of an orange picking robot: Past history, the new robot and experimental results. Ind. Robot. Int. J. 2005, 32, 128–138. [Google Scholar] [CrossRef]
- Liu, J.; Li, P.; Li, Z. A multi-sensory end-effector for spherical fruit harvesting robot. In Proceedings of the 2007 IEEE International Conference on Automation and Logistics, Jinan, China, 18–21 August 2007. [Google Scholar]
- Morales, A.; Prats, M.; Felip, J. Sensors and methods for the evaluation of grasping. In Grasping in Robotics; Springer: Berlin/Heidelberg, Germany, 2013; pp. 77–104. [Google Scholar]
- Hemming, J.; Bac, C.W.; Tuijl, v.B.A.; Barth, R.; Bontsema, J.; Pekkeriet, E.J.; Van Henten, E. A robot for harvesting sweet-pepper in greenhouses. In Proceedings of the International Conference of Agricultural Engineering, Zurich, Switzerland, 6–10 July 2014. [Google Scholar]
- Bao, G.; Yao, P.; Cai, S.; Ying, S.; Yang, Q. Flexible pneumatic end-effector for agricultural robot: Design & experiment. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2175–2180. [Google Scholar]
- Zhang, J.; Kang, N.; Qu, Q.; Zhou, L.; Zhang, H. Automatic fruit picking technology: A comprehensive review of research advances. Artif. Intell. Rev. 2024, 57, 54. [Google Scholar] [CrossRef]
- Qiu, Z.; Paul, H.; Wang, Z.; Hirai, S.; Kawamura, S. An Evaluation System of Robotic End-Effectors for Food Handling. Foods 2023, 12, 4062. [Google Scholar] [CrossRef] [PubMed]
- Samadikhoshkho, Z.; Zareinia, K.; Janabi-Sharifi, F. A brief review on robotic grippers classifications. In Proceedings of the 2019 IEEE Canadian Conference of Electrical and Computer Engineering (CCECE), Edmonton, AB, Canada, 5–8 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar]
- Wang, Y.; Zhang, M.; Liu, B.; Liu, S.; He, Y.; Xu, X.H. Design and experiment of clamping mechanism about end-effector for citrus harvesting robot. J. Agric. Sci. Technol. 2019, 21, 61–69. [Google Scholar]
- Pitla, S.; Bajwa, S.; Bhusal, S.; Brumm, T.; Brown-Brandl, T.M.; Buckmaster, D.R.; Condotta, I.; Fulton, J.; Janzen, T.; Karkee, M.; et al. Ground and Aerial Robots for Agricultural Production: Opportunities and Challenges; CAST: Ames, IA, USA, 2020. [Google Scholar]
- Hohimer, C.J.; Wang, H.; Bhusal, S.; Miller, J.; Mo, C.; Karkee, M. Design and field evaluation of a robotic apple harvesting system with a 3D-printed soft-robotic end-effector. Trans. ASABE 2019, 62, 405–414. [Google Scholar] [CrossRef]
- Silwal, A.; Davidson, J.R.; Karkee, M.; Mo, C.; Zhang, Q.; Lewis, K. Design, integration, and field evaluation of a robotic apple harvester. J. Field Robot. 2017, 34, 1140–1159. [Google Scholar] [CrossRef]
- Miao, Y.; Zheng, J. Optimization design of compliant constant-force mechanism for apple picking actuator. Comput. Electron. Agric. 2020, 170, 105232. [Google Scholar] [CrossRef]
- Bac, C.W.; Hemming, J.; Van Tuijl, B.; Barth, R.; Wais, E.; Henten, v.E.J. Performance evaluation of a harvesting robot for sweet pepper. J. Field Robot. 2017, 34, 1123–1139. [Google Scholar] [CrossRef]
- Goulart, R.; Jarvis, D.; Walsh, K.B. Evaluation of End Effectors for Robotic Harvesting of Mango Fruit. Sustainability 2023, 15, 6769. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, Y.; Zhang, S.; Wang, H.; Liu, L. Simulation Design of a Tomato Picking Manipulator. Teh. Vjesn. 2021, 28, 1253–1261. [Google Scholar]
- Chiu, Y.C.; Yang, P.Y.; Chen, S. Development of the end-effector of a picking robot for greenhouse-grown tomatoes. Appl. Eng. Agric. 2013, 29, 1001–1009. [Google Scholar]
- Fue, K.; Porter, W.; Barnes, E.; Li, C.; Rains, G. Center-articulated hydrostatic cotton harvesting rover using visual-servoing control and a finite state machine. Electronics 2020, 9, 1226. [Google Scholar] [CrossRef]
- Ji, W.; He, G.; Xu, B.; Zhang, H.; Yu, X. A New Picking Pattern of a Flexible Three-Fingered End-Effector for Apple Harvesting Robot. Agriculture 2024, 14, 102. [Google Scholar] [CrossRef]
- Zahid, A.; Mahmud, M.S.; He, L.; Heinemann, P.; Choi, D.; Schupp, J. Technological advancements towards developing a robotic pruner for apple trees: A review. Comput. Electron. Agric. 2021, 189, 106383. [Google Scholar] [CrossRef]
- Saleh, M.A.; Soliman, M.; Mousa, M.A.; Elsamanty, M.; Radwan, A.G. Design and implementation of variable inclined air pillow soft pneumatic actuator suitable for bioimpedance applications. Sens. Actuators A Phys. 2020, 314, 112272. [Google Scholar] [CrossRef]
- Fujinaga, T.; Yasukawa, S.; Ishii, K. Development and evaluation of a tomato fruit suction cutting device. In Proceedings of the 2021 IEEE/SICE International Symposium on System Integration (SII), Iwaki, Japan, 11–14 January 2021. [Google Scholar]
- Jun, J.; Kim, J.; Seol, J.; Kim, J.; Son, H.I. Towards an efficient tomato harvesting robot: 3d perception, manipulation, and end-effector. IEEE Access 2021, 9, 17631–17640. [Google Scholar] [CrossRef]
- Feng, Q.; Wang, X.; Wang, G.; Li, Z. Design and test of tomatoes harvesting robot. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015. [Google Scholar]
- Guo, A.; Li, J.; Guo, L.; Jiang, T.; Zhao, Y. Structural design and analysis of an automatic pineapple picking and collecting straddle machine. J. Phys. Conf. Ser. 2021, 1777, 012029. [Google Scholar] [CrossRef]
- Birrell, S.; Hughes, J.; Cai, J.Y.; Iida, F. A field-tested robotic harvesting system for iceberg lettuce. J. Field Robot. 2020, 37, 225–245. [Google Scholar] [CrossRef] [PubMed]
- Roshanianfard, A.; Noguchi, N. Pumpkin harvesting robotic end-effector. Comput. Electron. Agric. 2020, 174, 105503. [Google Scholar] [CrossRef]
- Anh, N.P.T.; Hoang, S.; Van Tai, D.; Quoc, B.L.C. Developing robotic system for harvesting pineapples. In Proceedings of the 2020 International Conference on Advanced Mechatronic Systems (ICAMechS), Hanoi, Vietnam, 10–13 December 2020. [Google Scholar]
- Xia, H.M.; Li, Q.R.; Zhen, W.B. Design of a pineapple picking end-actuator. Appl. Mech. Mater. 2012, 184, 134–139. [Google Scholar] [CrossRef]
- Wu, D.; Zhao, E.; Fang, D.; Jiang, S.; Wu, C.; Wang, W.; Wang, R. Determination of Vibration Picking Parameters of Camellia oleifera Fruit Based on Acceleration and Strain Response of Branches. Agriculture 2022, 12, 1222. [Google Scholar] [CrossRef]
- Wu, D.; Zhao, E.; Jiang, S.; Da, D.; Liu, Y. Influence of Excitation Position on Mechanized Picking Effect of Camellia Oleifera. Eng. Agrícola 2022, 42, e20220040. [Google Scholar] [CrossRef]
- Islam, M.N.; Iqbal, M.Z.; Ali, M.; Chowdhury, M.; Kabir, M.S.N.; Park, T.; Chung, S.O. Kinematic analysis of a clamp-type picking device for an automatic pepper transplanter. Agriculture 2020, 10, 627. [Google Scholar] [CrossRef]
- Esau, T.; Zaman, Q.; MacEachern, C.; Farooque, A.; Mohamed, M. Precise picking height positioning on wild blueberry harvesters using electric linear actuators. In Proceedings of the 2019 ASABE Annual International Meeting, Boston, MA, USA, 7–10 July 2019. [Google Scholar]
- Fu, J.; Ji, C.; Wang, W.; Liu, H.; Zhang, G.; Gao, Y.; Zhou, Y.; Abdeen, M.A. Design and test of smashing and scattering device of double-channel feeding ratoon rice harvester. Sci. Rep. 2022, 12, 15943. [Google Scholar] [CrossRef] [PubMed]
- Tian, K.; Li, X.; Zhang, B.; Chen, Q.; Shen, C.; Huang, J. Design and test research on cutting blade of corn harvester based on bionic principle. Appl. Bionics Biomech. 2017, 2017, 6953786. [Google Scholar] [CrossRef] [PubMed]
- Dewi, T.; Risma, P.; Oktarina, Y. Fruit sorting robot based on color and size for an agricultural product packaging system. Bull. Electr. Eng. Inform. 2020, 9, 1438–1445. [Google Scholar] [CrossRef]
- Gao, J.; Zhang, F.; Zhang, J.; Yuan, T.; Yin, J.; Guo, H.; Yang, C. Development and evaluation of a pneumatic finger-like end-effector for cherry tomato harvesting robot in greenhouse. Comput. Electron. Agric. 2022, 197, 106879. [Google Scholar] [CrossRef]
- Mu, L.; Cui, G.; Liu, Y.; Cui, Y.; Fu, L.; Gejima, Y. Design and simulation of an integrated end-effector for picking kiwifruit by robot. Inf. Process. Agric. 2020, 7, 58–71. [Google Scholar] [CrossRef]
- Taqi, F.; Al-Langawi, F.; Abdulraheem, H.; El-Abd, M. A cherry-tomato harvesting robot. In Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR), Hong Kong, China, 10–12 July 2017. [Google Scholar]
- Zhao, Y.; Gong, L.; Liu, C.; Huang, Y. Dual-arm robot design and testing for harvesting tomato in greenhouse. IFAC-PapersOnLine 2016, 49, 161–165. [Google Scholar] [CrossRef]
- Tejada, V.; Stoelen, M.; Kusnierek, K.; Heiberg, N.; Korsaeth, A. Proof-of-concept robot platform for exploring automated harvesting of sugar snap peas. Precis. Agric. 2017, 18, 952–972. [Google Scholar] [CrossRef]
- Davidson, J.R.; Hohimer, C.J.; Mo, C.; Karkee, M. Dual robot coordination for apple harvesting. In Proceedings of the 2017 ASABE Annual International Meeting, Washington, DC, USA, 16–19 July 2017. [Google Scholar]
- Kurbah, F.; Marwein, S.; Marngar, T.; Sarkar, B.K. Design and development of the pineapple harvesting robotic gripper. In Communication and Control for Robotic Systems; Springer: Berlin/Heidelberg, Germany, 2022; pp. 437–454. [Google Scholar]
- Gharakhani, H.; Thomasson, J.A.; Lu, Y. An end-effector for robotic cotton harvesting. Smart Agric. Technol. 2022, 2, 100043. [Google Scholar] [CrossRef]
- Wang, L.; Hou, Y.; Wang, K.; Wei, C. Research summary of “Camellia oleifera fruit picking robot” technical analysis. In Proceedings of the International Conference on Signal Processing and Communication Technology (SPCT 2021), Tianjin, China, 24–26 December 2021. [Google Scholar]
- You, K.; Burks, T.F. Development of a robotic fruit picking end effector and an adaptable controller. In Proceedings of the 2016 ASABE Annual International Meeting, Orlamda, FL, USA, 17–20 July 2016. [Google Scholar]
- Lertpiriyasuwat, V.; Berg, M.C. Adaptive real-time estimation of end-effector position and orientation using precise measurements of end-effector position. IEEE/ASME Trans. Mechatron. 2006, 11, 304–319. [Google Scholar] [CrossRef]
- Yi, J.B.; Kim, J.; Kang, T.; Song, D.; Park, J.; Yi, S.J. Anthropomorphic Grasping of Complex-Shaped Objects Using Imitation Learning. Appl. Sci. 2022, 12, 12861. [Google Scholar] [CrossRef]
- Davidson, J.R.; Mo, C. Mechanical design and initial performance testing of an apple-picking end-effector. In Proceedings of the ASME 2015 International Mechanical Engineering Congress and Exposition, Houston, TX, USA, 13–19 November 2015. [Google Scholar]
- Feng, Q. End-Effector Technologies. In Fundamentals of Agricultural and Field Robotics; Springer: Berlin/Heidelberg, Germany, 2021; pp. 191–212. [Google Scholar]
- Gao, J.; Zhang, F.; Zhang, J.; Guo, H.; Gao, J. Picking patterns evaluation for cherry tomato robotic harvesting end-effector design. Biosyst. Eng. 2024, 239, 1–12. [Google Scholar] [CrossRef]
- Arnal Barbedo, J.G. Digital image processing techniques for detecting, quantifying and classifying plant diseases. SpringerPlus 2013, 2, 660. [Google Scholar] [CrossRef] [PubMed]
- Fu, L.; Gao, F.; Wu, J.; Li, R.; Karkee, M.; Zhang, Q. Application of consumer RGB-D cameras for fruit detection and localization in field: A critical review. Comput. Electron. Agric. 2020, 177, 105687. [Google Scholar] [CrossRef]
- Dimeas, F.; Sako, D.V.; Moulianitis, V.C.; Aspragathos, N.A. Design and fuzzy control of a robotic gripper for efficient strawberry harvesting. Robotica 2015, 33, 1085–1098. [Google Scholar] [CrossRef]
- Lin, G.; Zhu, L.; Li, J.; Zou, X.; Tang, Y. Collision-free path planning for a guava-harvesting robot based on recurrent deep reinforcement learning. Comput. Electron. Agric. 2021, 188, 106350. [Google Scholar] [CrossRef]
- Xu, Y.; Han, Y.; Sun, Z.; Gu, W.; Jin, Y.; Xue, X.; Lan, Y. Path Planning Optimization with Multiple Pesticide and Power Loading Bases Using Several Unmanned Aerial Systems on Segmented Agricultural Fields. IEEE Trans. Syst. Man Cybern. Syst. 2022, 53, 1882–1894. [Google Scholar] [CrossRef]
- Jia, W.; Tian, Y.; Luo, R.; Zhang, Z.; Lian, J.; Zheng, Y. Detection and segmentation of overlapped fruits based on optimized mask R-CNN application in apple harvesting robot. Comput. Electron. Agric. 2020, 172, 105380. [Google Scholar] [CrossRef]
- You, T.; Wu, H.; Xu, X.; Petrovic, P.B.; Rodic, A. A Proposed Priority Pushing and Grasping Strategy Based on an Improved Actor-Critic Algorithm. Electronics 2022, 11, 2065. [Google Scholar] [CrossRef]
- Zujevs, A.; Osadcuks, V.; Ahrendt, P. Trends in robotic sensor technologies for fruit harvesting: 2010–2015. Procedia Comput. Sci. 2015, 77, 227–233. [Google Scholar] [CrossRef]
- Zhang, J.; Lai, S.; Yu, H.; Wang, E.; Wang, X.; Zhu, Z. Fruit classification utilizing a robotic gripper with integrated sensors and adaptive grasping. Math. Probl. Eng. 2021, 1–15. [Google Scholar] [CrossRef]
- Liu, J.; Liu, Z. The Vision-Based Target Recognition, Localization, and Control for Harvesting Robots: A Review. Int. J. Precis. Eng. Manuf. 2023, 25, 409–428. [Google Scholar] [CrossRef]
- Yoshida, T.; Kawahara, T.; Fukao, T. Fruit recognition method for a harvesting robot with RGB-D cameras. ROBOMECH J. 2022, 9, 15. [Google Scholar] [CrossRef]
- Li, T.; Feng, Q.; Qiu, Q.; Xie, F.; Zhao, C. Occluded apple fruit detection and localization with a frustum-based point-cloud-processing approach for robotic harvesting. Remote Sens. 2022, 14, 482. [Google Scholar] [CrossRef]
- Rath, T.; Kawollek, M. Robotic harvesting of Gerbera Jamesonii based on detection and three-dimensional modeling of cut flower pedicels. Comput. Electron. Agric. 2009, 66, 85–92. [Google Scholar] [CrossRef]
- Cho, B.H.; Kim, Y.H.; Lee, K.B.; Hong, Y.K.; Kim, K.C. Potential of snapshot-type hyperspectral imagery using support vector classifier for the classification of tomatoes maturity. Sensors 2022, 22, 4378. [Google Scholar] [CrossRef] [PubMed]
- Moreira, E.; Rocha, L.F.; Pinto, A.M.; Moreira, A.P.; Veiga, G. Assessment of robotic picking operations using a 6 axis force/torque sensor. IEEE Robot. Autom. Lett. 2016, 1, 768–775. [Google Scholar] [CrossRef]
- Syafeeza, A.; Hamid, N.A.; Eng, M.L.; Lee, G.W.; Thai, H.J.; Amsan, A.N. Robotic Arm Gripper Using Force Sensor for Crop Picking Mechanism. J. Telecommun. Electron. Comput. Eng. (JTEC) 2022, 14, 11–15. [Google Scholar] [CrossRef]
- Zhang, F.; Chen, Z.; Wang, Y.; Wang, Y.; Bao, R.; Chen, X.; Fu, S.; Zhang, Y. Research on flexible end-effectors with humanoid grasp function for small spherical fruit picking. Agriculture 2023, 13, 123. [Google Scholar] [CrossRef]
- Tajima, S.; Wakamatsu, S.; Abe, T.; Tennomi, M.; Morita, K.; Ubata, H.; Watanabe, T. Robust bin-picking system using tactile sensor. Adv. Robot. 2020, 34, 439–453. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, B.; Zhou, J.; Bai, Y.; Zhang, M. An integrated multi-sensor network for adaptive grasping of fragile fruits: Design and feasibility tests. Sensors 2020, 20, 4973. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Zhou, J.; Yan, Z.; Wang, K.; Mao, J.; Jiang, Z. Hardness recognition of fruits and vegetables based on tactile array information of manipulator. Comput. Electron. Agric. 2021, 181, 105959. [Google Scholar] [CrossRef]
- Mohamed, A.; Shaw-Sutton, J.; Green, B.; Andrews, W.; Rolley-Parnell, E.J.; Zhou, Y.; Stoelen, M.F. Soft Manipulator Robot for Selective Tomato Harvesting; Wageningen Academic Publishers: Wageningen, The Netherlands, 2019; pp. 244–255. [Google Scholar]
- Cheng, P.; Ye, Y.; Yan, B.; Lu, Y.; Wu, C. A novel soft gripper with enhanced gripping adaptability based on spring-reinforced soft pneumatic actuators. Ind. Robot Int. J. Robot. Res. Appl. 2023, 50, 595–608. [Google Scholar] [CrossRef]
- Bulanon, D.M.; Kataoka, T. Fruit detection system and an end effector for robotic harvesting of Fuji apples. Agric. Eng. Int. CIGR J. 2010, 12, 203–210. [Google Scholar]
- Roshanianfard, A.; Kamata, T.; Noguchi, N. Performance evaluation of harvesting robot for heavy-weight crops. IFAC-PapersOnLine 2018, 51, 332–338. [Google Scholar] [CrossRef]
- Ansari, S.; Bhattacharya, B. Design and Development of a Tomato Picking Soft Robotic Gripper with a Separator and Mechanical Iris Based Pedicel Cutting Mechanism. Springer: Berlin/Heidelberg, Germany, 2022; pp. 276–286. [Google Scholar]
- Lu, R.; Dickinson, N.; Lammers, K.; Zhang, K.; Chu, P.; Li, Z. Design and evaluation of end effectors for a vacuum-based robotic apple harvester. J. ASABE 2022, 65, 963–974. [Google Scholar] [CrossRef]
- Zhou, K.; Xia, L.; Liu, J.; Qian, M.; Pi, J. Design of a flexible end-effector based on characteristics of tomatoes. Int. J. Agric. Biol. Eng. 2022, 15, 13–24. [Google Scholar] [CrossRef]
- Chen, K.; Li, T.; Yan, T.; Xie, F.; Feng, Q.; Zhu, Q.; Zhao, C. A soft gripper design for apple harvesting with force feedback and fruit slip detection. Agriculture 2022, 12, 1802. [Google Scholar] [CrossRef]
- Xiong, Z.; Feng, Q.; Li, T.; Xie, F.; Liu, C.; Liu, L.; Zhao, C. Dual-Manipulator Optimal Design for Apple Robotic Harvesting. Agronomy 2022, 12, 3128. [Google Scholar] [CrossRef]
- Yu, X.; Fan, Z.; Wang, X.; Wan, H.; Wang, P.; Zeng, X.; Jia, F. A lab-customized autonomous humanoid apple harvesting robot. Comput. Electr. Eng. 2021, 96, 107459. [Google Scholar] [CrossRef]
- Zhang, Z.; Igathinathane, C.; Li, J.; Cen, H.; Lu, Y.; Flores, P. Technology progress in mechanical harvest of fresh market apples. Comput. Electron. Agric. 2020, 175, 105606. [Google Scholar] [CrossRef]
- Ross, C. Robotic Pickers Progress through Pandemic. 2020. Available online: https://www.goodfruit.com/robotic-pickers-progress-through-pandemic (accessed on 16 December 2020).
- Yin, H.; Sun, Q.; Ren, X.; Guo, J.; Yang, Y.; Wei, Y.; Zhong, M. Development, integration, and field evaluation of an autonomous citrus-harvesting robot. J. Field Robot. 2023, 40, 1363–1387. [Google Scholar] [CrossRef]
- Tang, Z.; Xu, L.; Wang, Y.; Kang, Z.; Xie, H. Collision-free motion planning of a six-link manipulator used in a citrus picking robot. Appl. Sci. 2021, 11, 11336. [Google Scholar] [CrossRef]
- Mehta, S.; Burks, T. Vision-based control of robotic manipulator for citrus harvesting. Comput. Electron. Agric. 2014, 102, 146–158. [Google Scholar] [CrossRef]
- Chen, M.; Chen, F.; Zhou, W.; Zuo, R. Design of Flexible Spherical Fruit and Vegetable Picking End-effector Based on Vision Recognition. J. Phys. Conf. Ser. 2022, 2246, 012060. [Google Scholar] [CrossRef]
- Xiao, X.; Wang, Y.; Jiang, Y. End-Effectors Developed for Citrus and Other Spherical Crops. Appl. Sci. 2022, 12, 7945. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Y.; Yang, C.; Zhao, H.; Chen, G.; Zhang, Z.; Xu, H. End-effector with a bite mode for harvesting citrus fruit in random stalk orientation environment. Comput. Electron. Agric. 2019, 157, 454–470. [Google Scholar] [CrossRef]
- Zou, X.; Ye, M.; Luo, C.; Xiong, J.; Luo, L.; Wang, H.; Chen, Y. Fault-tolerant design of a limited universal fruit-picking end-effector based on vision-positioning error. Appl. Eng. Agric. 2016, 32, 5–18. [Google Scholar]
- Xiong, Y.; Ge, Y.; Grimstad, L.; From, P.J. An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation. J. Field Robot. 2020, 37, 202–224. [Google Scholar] [CrossRef]
- Yamamoto, S.; Hayashi, S.; Yoshida, H.; Kobayashi, K. Development of a stationary robotic strawberry harvester with a picking mechanism that approaches the target fruit from below. Jpn. Agric. Res. Q. JARQ 2014, 48, 261–269. [Google Scholar] [CrossRef]
- Hayashi, S.; Yamamoto, S.; Tsubota, S.; Ochiai, Y.; Kobayashi, K.; Kamata, J.; Peter, R. Automation technologies for strawberry harvesting and packing operations in Japan. J. Berry Res. 2014, 4, 19–27. [Google Scholar] [CrossRef]
- Parsa, S.; Debnath, B.; Khan, M.A.; Ghalamzan, E.A. Modular autonomous strawberry picking robotic system. J. Field Robot. 2023. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, K.; Yang, L.; Zhang, D.; Cui, T.; Yu, Y.; Liu, H. Design and simulation experiment of ridge planting strawberry picking manipulator. Comput. Electron. Agric. 2023, 208, 107690. [Google Scholar] [CrossRef]
- Kurpaska, S.; Bielecki, A.; Sobol, Z.; Bielecka, M.; Habrat, M.; Smigielski, P. The Concept of the Constructional Solution of the Working Section of a Robot for Harvesting Strawberries. Sensors. 2021, 21, 3933. [Google Scholar] [CrossRef] [PubMed]
- Anjom, F.K.; Vougioukas, S.G.; Slaughter, D.C. Development and application of a strawberry yield-monitoring picking cart. Comput. Electron. Agric. 2018, 155, 400–411. [Google Scholar] [CrossRef]
- Oktarina, Y.; Dewi, T.; Risma, P.; Nawawi, M. Tomato harvesting arm robot manipulator, a pilot project. J. Phys. Conf. Ser. 2020, 1500, 012003. [Google Scholar] [CrossRef]
- Yeshmukhametov, A.; Koganezawa, K.; Yamamoto, Y.; Buribayev, Z.; Mukhtar, Z.; Amirgaliyev, Y. Development of Continuum Robot Arm and Gripper for Harvesting Cherry Tomatoes. Appl. Sci. 2022, 12, 6922. [Google Scholar] [CrossRef]
- Vu, Q.; Ronzhin, A. A Model of Four-Finger Gripper with a Built-In Vacuum Suction Nozzle for Harvesting Tomatoes. In Proceedings of the 14th International Conference on Electromechanics and Robotics “Zavalishin’s Readings” ER (ZR) 2019, Kursk, Russia, 17–20 April 2019. [Google Scholar]
- Cao, P.; Wang, T.; Zhai, L.; Niu, S.; Liu, L.; Shi, Y. Design of 6-DOF Tomato Picking Lifting Platform. Agriculture 2022, 12, 1945. [Google Scholar] [CrossRef]
- Habegger, R.; Bergamo, E.; Schwab, W.; Berninger, T.; Rixen, D. Impact of intensive modification of sweet pepper plants on performance of end effectors for autonomous harvesting. Eur. J. Hortic. Sci. 2021, 86, 354–359. [Google Scholar] [CrossRef]
- Lehnert, C.; English, A.; McCool, C.; Tow, A.W.; Perez, T. Autonomous sweet pepper harvesting for protected cropping systems. IEEE Robot. Autom. Lett. 2017, 2, 872–879. [Google Scholar] [CrossRef]
- Arad, B.; Balendonck, J.; Barth, R.; Ben-Shahar, O.; Edan, Y.; Hellström, T.; Van Tuijl, B. Development of a sweet pepper harvesting robot. J. Field Robot. 2020, 37, 1027–1039. [Google Scholar] [CrossRef]
- Yang, L.; Tian, R.; Wang, Q.; Hoshino, Y.; Yang, S.; Cao, Y. Optimal design and simulation of a robot hand for a robot pumpkin harvesting system. Int. Robot. Autom. J. 2020, 6, 1–5. [Google Scholar] [CrossRef]
- Blanes, C.; Mellado, M.; Beltrán, P. Tactile sensing with accelerometers in prehensile grippers for robots. Mechatronics 2016, 33, 1–12. [Google Scholar] [CrossRef]
- Davidson, J.R.; Mo, C. Conceptual design of an end-effector for an apple harvesting robot. In Proceedings of the Conference on Automation Technology for Off-Road Equipment (ATOE), Beijing, China, 16–19 September 2014; Volume 18, p. 2021. [Google Scholar]
- Xu, L.; Xie, Y.; Chen, X.; Chen, Y.; Kang, Z.; Huang, P.; Zhao, Y. Design of an efficient combined multipoint picking scheme for tea buds. Front. Plant Sci. 2022, 13, 1042035. [Google Scholar] [CrossRef] [PubMed]
- SepúLveda, D.; Fernández, R.; Navas, E.; Armada, M.; Gonzalez-De-Santos, P. Robotic aubergine harvesting using dual-arm manipulation. IEEE Access 2020, 8, 121889–121904. [Google Scholar] [CrossRef]
- Blanes, C.; Ortiz, C.; Mellado, M.; Beltrán, P. Assessment of eggplant firmness with accelerometers on a pneumatic robot gripper. Comput. Electron. Agric. 2015, 113, 44–50. [Google Scholar] [CrossRef]
- Roshanianfard, A.; Noguchi, N.; Ardabili, S.; Mako, C.; Mosavi, A. Autonomous robotic system for pumpkin harvesting. Agronomy 2022, 12, 1594. [Google Scholar] [CrossRef]
- Qian, S.; Yang, Q.; Wang, Z.; Bao, G.; Zhang, L. Research on holding characteristics of cucumber and end-effector of cucumber picking. Trans. Chin. Soc. Agric. Eng. 2010, 26, 107–112. [Google Scholar]
- Park, Y.; Seol, J.; Pak, J.; Jo, Y.; Kim, C.; Son, H.I. Human-centered approach for an efficient cucumber harvesting robot system: Harvest ordering, visual servoing, and end-effector. Comput. Electron. Agric. 2023, 212, 108116. [Google Scholar] [CrossRef]
- Jo, Y.; Park, Y.; Son, H.I. A suction cup-based soft robotic gripper for cucumber harvesting: Design and validation. Biosyst. Eng. 2024, 238, 143–156. [Google Scholar] [CrossRef]
- Reed, J.; Tillett, R. Initial experiments in robotic mushroom harvesting. Mechatronics 1994, 4, 265–279. [Google Scholar] [CrossRef]
- Visen, N.; Shashidhar, N.; Paliwal, J.; Jayas, D. AE—Automation and emerging technologies. J. Agric. Eng. Res. 2001, 2, 159–166. [Google Scholar] [CrossRef]
- Yang, S.; Ji, J.; Cai, H.; Chen, H. Modeling and Force Analysis of a Harvesting Robot for Button Mushrooms. IEEE Access 2022, 10, 78519–78526. [Google Scholar] [CrossRef]
- Huang, M.; Jiang, X.; He, L.; Choi, D.; Pecchia, J.; Li, Y. Development of a robotic harvesting mechanism for button mushrooms. Trans. ASABE 2021, 64, 565–575. [Google Scholar] [CrossRef]
- Huang, M.; He, L.; Choi, D.; Pecchia, J.; Li, Y. Picking dynamic analysis for robotic harvesting of Agaricus bisporus mushrooms. Comput. Electron. Agric. 2021, 185, 106145. [Google Scholar] [CrossRef]
- Kang, S.; Zhang, Q.; Li, Z.; Yin, C.; Feng, N.; Shi, Y. Determination of the quality of tea from different picking periods: An adaptive pooling attention mechanism coupled with an electronic nose. Postharvest Biol. Technol. 2023, 197, 112214. [Google Scholar] [CrossRef]
- Yang, H.; Chen, L.; Ma, Z.; Chen, M.; Zhong, Y.; Deng, F.; Li, M. Computer vision-based high-quality tea automatic plucking robot using Delta parallel manipulator. Comput. Electron. Agric. 2021, 181, 105946. [Google Scholar] [CrossRef]
- Zhu, L.; Zhang, Z.; Lin, G.; Chen, P.; Li, X.; Zhang, S. Detection and Localization of Tea Bud Based on Improved YOLOv5s and 3D Point Cloud Processing. Agronomy 2023, 13, 2412. [Google Scholar] [CrossRef]
- Lin, G.; Xiong, J.; Zhao, R.; Li, X.; Hu, H.; Zhu, L.; Zhang, R. Efficient detection and picking sequence planning of tea buds in a high-density canopy. Comput. Electron. Agric. 2023, 213, 108213. [Google Scholar] [CrossRef]
- Li, Y.; Wu, S.; He, L.; Tong, J.; Zhao, R.; Jia, J.; Wu, C. Development and field evaluation of a robotic harvesting system for plucking high-quality tea. Comput. Electron. Agric. 2023, 206, 107659. [Google Scholar] [CrossRef]
- Zhu, Y.; Wu, C.; Tong, J.; Chen, J.; He, L.; Wang, R.; Jia, J. Deviation tolerance performance evaluation and experiment of picking end effector for famous tea. Agriculture 2021, 11, 128. [Google Scholar] [CrossRef]
- Chen, C.; Lu, J.; Zhou, M.; Yi, J.; Liao, M.; Gao, Z. A YOLOv3-based computer vision system for identification of tea buds and the picking point. Comput. Electron. Agric. 2022, 198, 107116. [Google Scholar] [CrossRef]
- Bu, L.; Chen, C.; Hu, G.; Sugirbay, A.; Sun, H.; Chen, J. Design and evaluation of a robotic apple harvester using optimized picking patterns. Comput. Electron. Agric. 2022, 198, 107092. [Google Scholar] [CrossRef]
- Yu, Z.; Yuan, J.; Guo, D.; Du, L.; Bao, S.; Ma, S. Underactuated Picking Gripper for Grasping and Cutting Citrus. In Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 27–31 December 2021. [Google Scholar]
- Mapes, J.; Dai, A.; Xu, Y.; Agehara, S. Harvesting End-effector Design and Picking Control. In Proceedings of the 2021 IEEE Symposium Series on Computational Intelligence (SSCI), Orlando, FL, USA, 5–7 December 2021. [Google Scholar]
- Ren, G.; Wu, T.; Lin, T.; Yang, L.; Chowdhary, G.; Ting, K.C.; Ying, Y. Mobile robotics platform for strawberry sensing and harvesting within precision indoor farming systems. J. Field Robot. 2023, 1–9. [Google Scholar] [CrossRef]
- Mu, L.; Liu, Y.; Cui, Y.; Liu, H.; Chen, L.; Fu, L.; Gejima, Y. Design of end-effector for kiwifruit harvesting robot experiment. In Proceedings of the 2017 ASABE Annual International Meeting, Washington, DC, USA, 16–19 July 2017. [Google Scholar]
- Min, F.; Shike, G.; Jianan, C.; Jiacheng, Z.; Xiaoyi, L. Triz-aided design and experiment of kiwifruit picking end-effector. Inmateh-Agric. Eng. 2023, 71, 356–366. [Google Scholar]
- Zhang, F.; Li, Z.; Wang, B.; Su, S.; Fu, L.; Cui, Y. Study on recognition and non-destructive picking end-effector of kiwifruit. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014. [Google Scholar]
- Jiang, Y.; Liu, J.; Wang, J.; Li, W.; Peng, Y.; Shan, H. Development of a dual-arm rapid grape-harvesting robot for horizontal trellis cultivation. Front. Plant Sci. 2022, 13, 881904. [Google Scholar] [CrossRef]
- Sui, S.; Li, M.; Li, Z.; Zhao, Y.; Wang, C.; Du, W.; Liu, P. A comb-type end-effector for inflorescence thinning of table grapes. Comput. Electron. Agric. 2024, 217, 108607. [Google Scholar] [CrossRef]
- Hemming, J.; Balendonck, J. Advances in the use of robotics in greenhouse cultivation. In Advances in Agri-Food Robotics; Burleigh Dodds Science Publishing: Cambridge, UK, 2024; pp. 635–660. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification Criteria | Types | Application Objects | Principles | References |
|---|---|---|---|---|
| By working principle | Clamp type | Citrus, Sweet pepper, etc. | The motor controls claw opening and closing through a spring system | [60,61] |
| Vacuum-sucker type | Strawberries, cherry tomato | Negative pressure is generated by the air pump so that the sucker is adsorbed to the target object | [17,18] | |
| Scissors actuators | Pineapple, guava, etc. | Cutting crops with blades that rotate or reciprocate at high speeds | [62,63] | |
| Vibrating actuator | Apple, jujube, oil tea, etc. | To shake trees or bushes by mechanical vibration to cause ripe fruit or fruit to fall | [64,65] | |
| By driver mode | Electric actuator | Blueberries, corn, etc. | The movement of the claw is controlled by the motor or the generator set | [66,67] |
| Hydraulic actuator | Rice, corn, etc. | The hydraulic system provides power to control the fixture movement | [68,69] | |
| Pneumatic actuator | Pick, carry, etc. | A pneumatic system (helium) provides power to control fixture movement | [70] | |
| By end mechanism | Clamp actuator | Sweet pepper, citrus, etc. | Through the clamping principle to grasp or cut the products | [43] |
| Finger actuator | Apples, tomatoes, etc. | Composed of several small “fingers”, including two fingers, three fingers, or more fingers | [71] | |
| Bionic actuator | Kiwi, citrus, etc. | Use the characteristics of plants or animals interface to imitate the design | [72] | |
| By degrees of freedom | 3 DOF | Cherry tomato | Including x-axis, y-axis, and z-axis, moving up and down, left and right, and rotating motion | [73,74] |
| 5 DOF | Sugar snap peas, etc. | Including three rotational motions and two translational motions | [75] | |
| 6 DOF | Apple, etc. | Including three rotational motions and three translational motions | [76] | |
| 7 DOF | Grape, etc. | Compared with 6DOF, more degrees of freedom of fixture | [21] | |
| By material | Metal actuator | Pineapple, etc. | Made of high-stiffness steel, aluminum alloy, and titanium alloy | [77] |
| Plastic actuator | Cotton, etc. | Made of thermoplastic materials such as polyimide (PI) and polypropylene (PP) | [78] | |
| Composite actuator | Apple, etc. | Made of high-strength and microweight materials such as carbon and glass fiber and aramid fiber | [53] | |
| By applicable object | Fruits | Fruits | Design based on the characteristics of the fruit | [54] |
| Vegetables | Vegetables | Design based on the characteristics of vegetables | [14] | |
| Other crop actuator | Mushroom, tea, etc. | Special end-effector designed for special crops | [79] |
| Application Object | Actuator Type | Harvesting Method | Driving Mode | Additional Sensor | Material | Successful Rate | Damage Rate | Reference |
|---|---|---|---|---|---|---|---|---|
| Apple | Two-finger gripper | Pull and rotate | Electrical motor | Pressure and displacement sensor | 3D printing of polyformaldehyde | 95.3% | / | [47] |
| Vacuum sucker type | Pull and rotate | Pneumatic | RGB-D | Soft silicone | 80% | / | [17] | |
| Three-finger gripper | Pull and rotate | Electrical motor | Force sensor and IMU | Rigid gripper | 84% | 13% | [46] | |
| Two-finger gripper | Rotate | Electrical motor | CCD camera and laser distance sensor | Rigid gripper | 89% | / | [108] | |
| Three-finger gripper | Rotate and pull | Electrical motor | Pressure sensor | 3D printing ABS | / | / | [141] | |
| Three-finger gripper | Horizontal pull with bending | Electrical motor | Binocular sensor | Soft silicone | 82.93% | / | [161] | |
| Citrus and orange | Three-finger gripper | Cut | Electrical motor | Pressure sensor | 3D printing ABS | 95.23% | 1.11% | [122] |
| Three-finger gripper | Rotate | Pneumatic | Pressure and torque sensor | 3D printing ABS | / | / | [121] | |
| Suction-holding type | Cut | Vacuum pneumatic | Pressure sensor | Chloroprene | 95% | / | [80] | |
| Bionic type | Bite and cut | Pneumatic | Vision sensor | Rigid gripper | 89% | / | [123] | |
| Four-finger gripper | Cut | Electrical motor | / | 3D printing plastic | / | / | [162] | |
| Strawberry | Envelope type | Tooth cutting | Electrical motor | Vision sensor | Plastic | 69% | / | [163] |
| Three-finger gripper | Rotate | Electrical motor | Pressure sensor | Foam | 60–80% | / | [88] | |
| Envelope type | Cut | Electrical motor | Infrared sensor | Plastic | 59% | 5.4% | [20] | |
| Three-finger gripper | Pull and rotate | Pneumatic | Vision sensor | Soft gripper | 78% | 23% | [164] | |
| Kiwifruit | Two-finger gripper | Flexural rotation | Electrical motor | Fiber optic sensor | 3D printing plastic | 80–100% | 10–20% | [165] |
| Envelope type | Cut | Electrical motor | Color detection sensor | Rigid gripper | 89.3% | 6% | [166] | |
| Two-finger gripper | Rotate | Electrical motor | Infrared sensor | Plastic | 88.89% | / | [167] | |
| Cherry tomato | Two-finger gripper | Rotate and pull | Pneumatic | RGB-D | Nylon and silicone | 84% | 1.9% | [71] |
| Three-finger gripper | Pull | Pneumatic | Pressure sensor | Silicone | 97% | / | [112] | |
| Vacuum adsorption type | Cut | Pneumatic | Pressure sensor | 3D printed silicone | 80.63% | / | [18] | |
| Three-finger gripper | Pull and rotate | Electrical motor | Pressure sensor | Soft gripper | 95.82% | 2.9% | [102] | |
| Grape | Two-finger gripper | Cut | Electrical motor | Vision sensor | Rigid gripper | 83% | / | [168] |
| Two-finger gripper | Inflorescence thinning end-effector | Electrical motor | Vision sensor | 3D printing plastic | 86% | 5% | [169] | |
| Sweet pepper | Two-finger gripper | Cut | Brushless Direct Current Motor | No | Metal | ./ | / | [136] |
| Six-finger gripper | Vibratory Cutting | Electrical motor | RGB-D | Soft plastic and metal | 61% | / | [138] | |
| Two-finger gripper | Cut | Electrical motor | RGB | Plastic | 26% | 13% | [48] | |
| Vacuum sucker type | Cut | Pneumatic and electrical motor | RGB and pressure sensor | Metal | 33% | / | [48] | |
| Vacuum sucker type | Vibratory Cutting | Pneumatic | RGB-D and pressure sensor | Soft silicone | 90% | / | [137] | |
| Eggplant | Four-finger combined the suction pads | Cut | Air compressor | Photoelectric sensor | Soft plastic and metal | 62.5% | 12.5% | [30] |
| Suction-holding type | Pull and rotate | Electrical motor | Pressure sensor | 3D printing plastic | 90% | / | [144] | |
| Pumpkin | Envelope type | Cut | Electrical motor | No | Metal | / | / | [139] |
| Five-finger gripper | Cut | Servo motor | Vision sensor | Metal | 79% | 5% | [145] | |
| Cucumber | Suction-holding type | Cut | Direct Current Motor | Local camera | Soft plastic and metal | 86.2% | 4.7% | [148] |
| Vacuum adsorption type | Cut | Pneumatic | Vision sensor | 3D printed silicone | 90% | / | [146] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, C.; Lv, J.; Dong, C.; Li, J.; Luo, Y.; Wu, W.; Abdeen, M.A. Classification, Advanced Technologies, and Typical Applications of End-Effector for Fruit and Vegetable Picking Robots. Agriculture 2024, 14, 1310. https://doi.org/10.3390/agriculture14081310
Han C, Lv J, Dong C, Li J, Luo Y, Wu W, Abdeen MA. Classification, Advanced Technologies, and Typical Applications of End-Effector for Fruit and Vegetable Picking Robots. Agriculture. 2024; 14(8):1310. https://doi.org/10.3390/agriculture14081310
Chicago/Turabian StyleHan, Chongyang, Jinhong Lv, Chengju Dong, Jiehao Li, Yuanqiang Luo, Weibin Wu, and Mohamed Anwer Abdeen. 2024. "Classification, Advanced Technologies, and Typical Applications of End-Effector for Fruit and Vegetable Picking Robots" Agriculture 14, no. 8: 1310. https://doi.org/10.3390/agriculture14081310