
The Design and Optimization of a Peanut-Picking System for a Fresh-Peanut-Picking Crawler Combine Harvester



 ,
, 

Abstract
1. Introduction
2. Materials and Methods
2.1. The Overall Structure of the Fresh-Peanut-Picking Crawler Combine Harvester
2.2. Working Principle
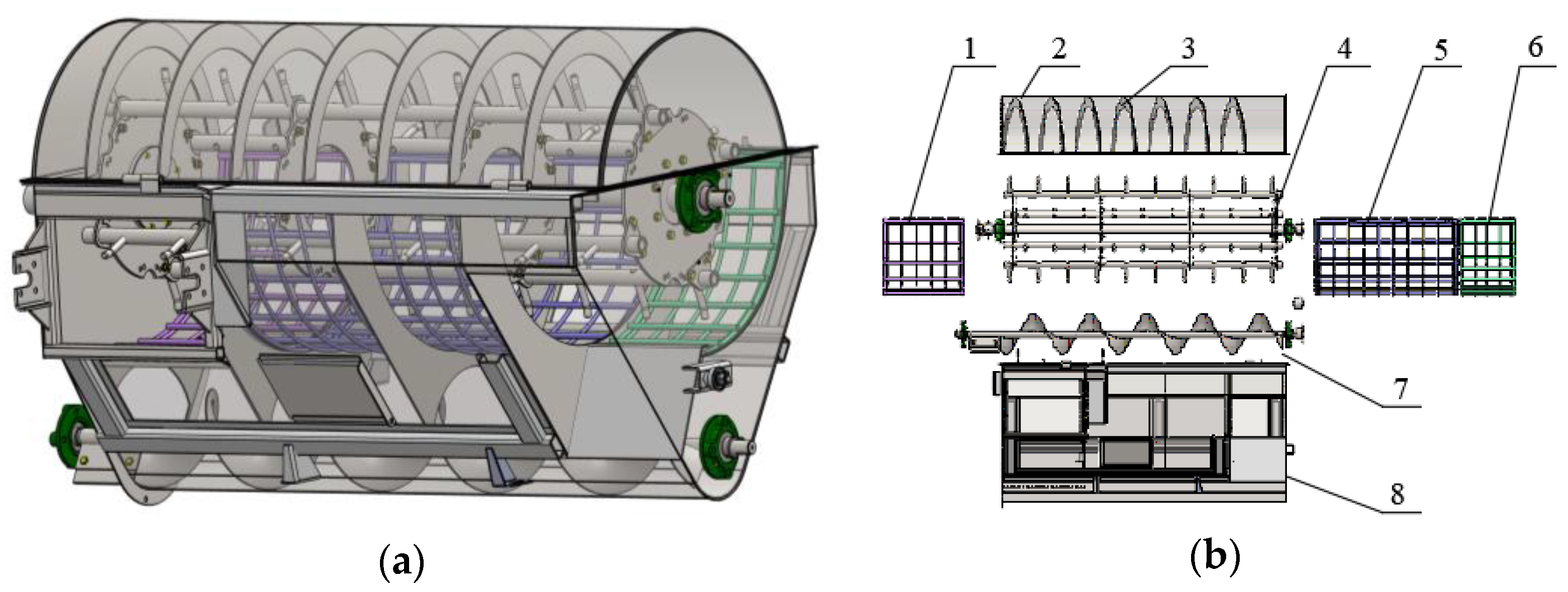
2.3. The Overall Structure of the Peanut-Picking System
2.4. Design of Key Components of the Peanut-Picking System
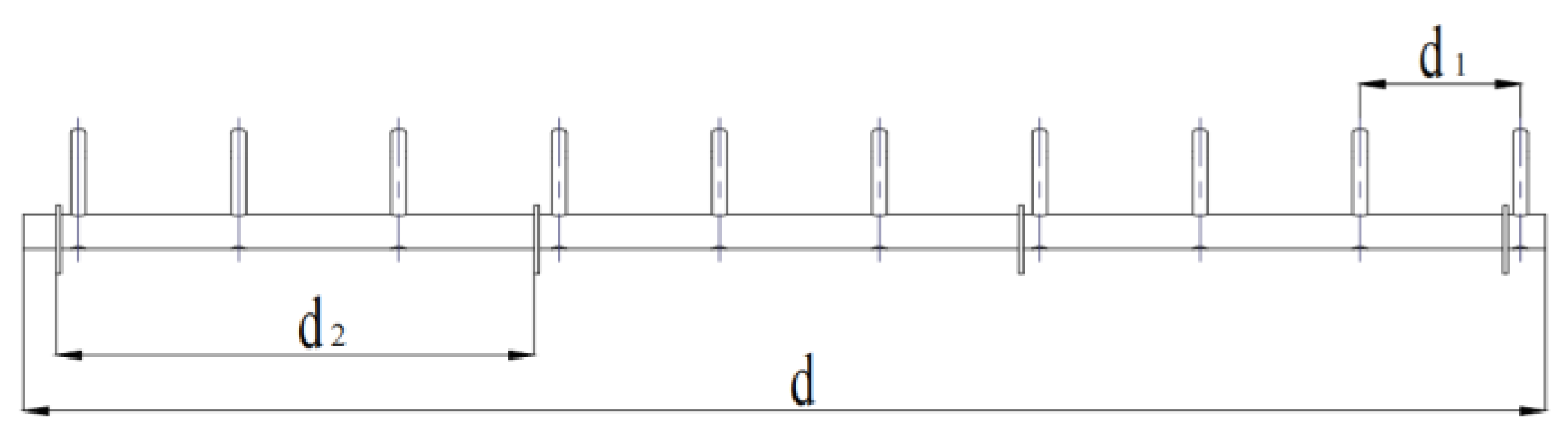
2.4.1. Peanut-Picking Roller
2.4.2. Length of the Peanut-Picking Roller
2.4.3. Diameter of the Peanut-Picking Roller
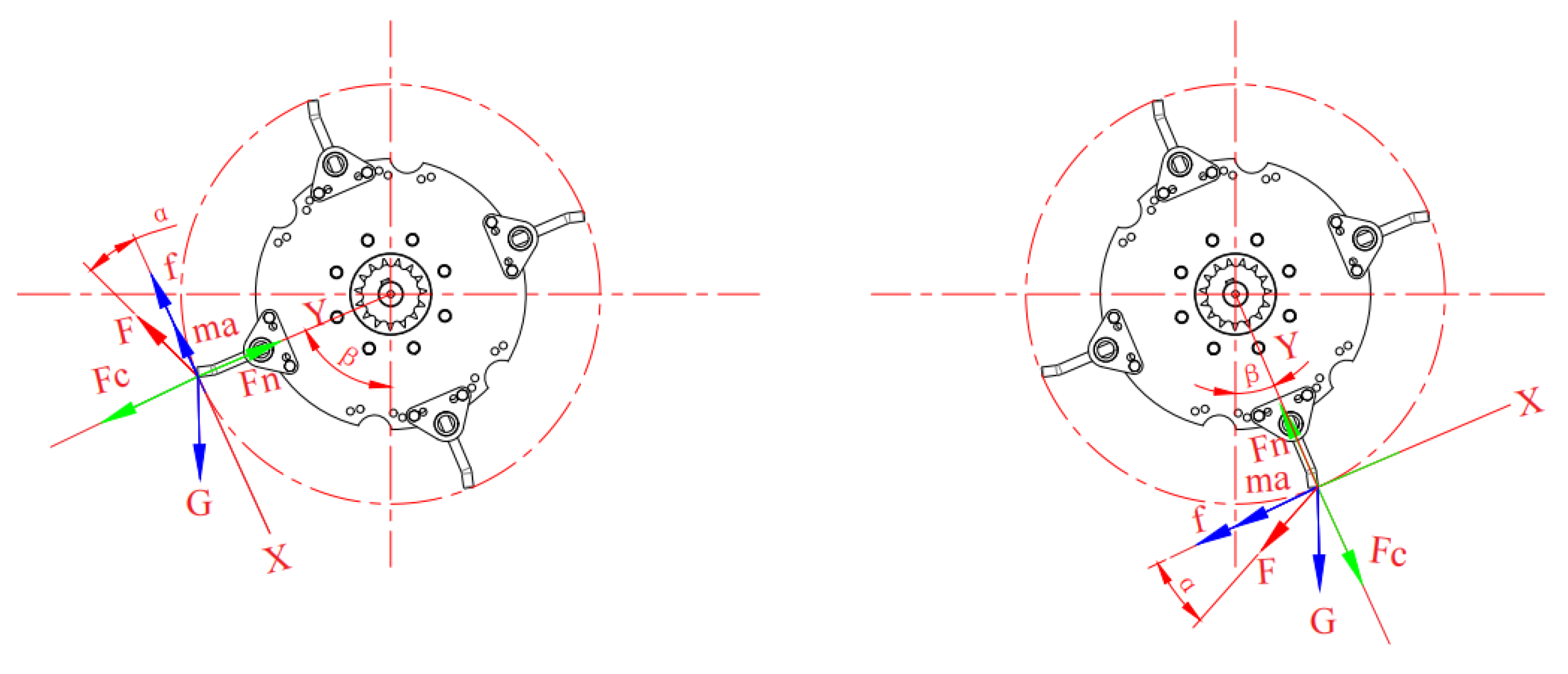
2.4.4. Peanut-Picking Roller Speed
2.4.5. Peanut-Picking Tooth
2.4.6. Number of Tooth Rows for Peanut Picking
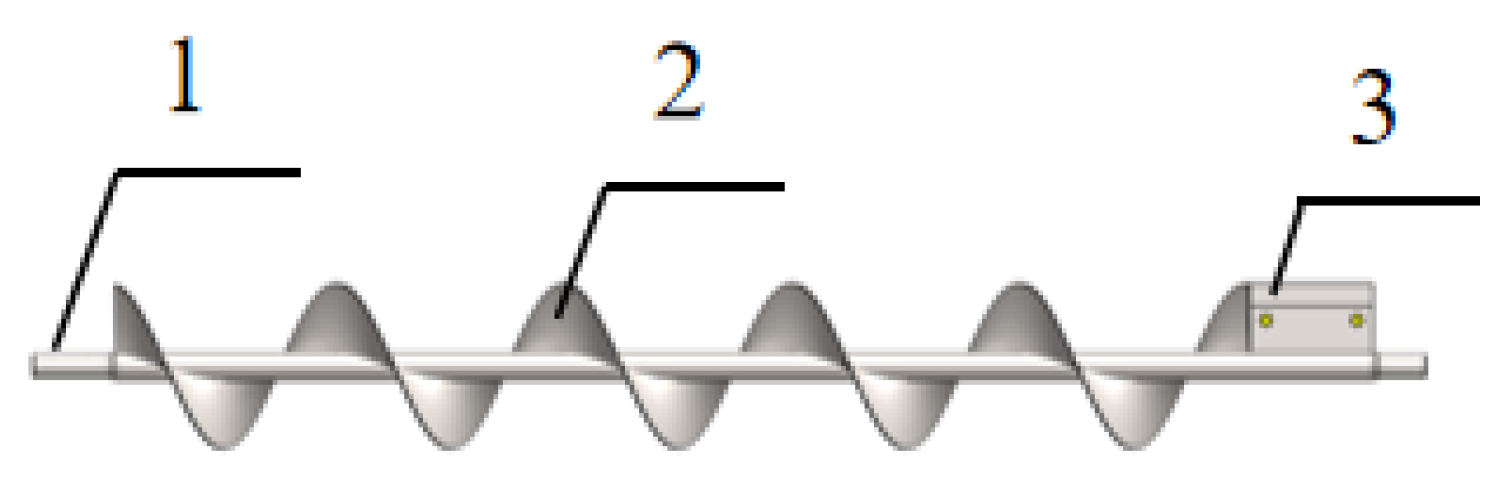
2.4.7. Peanut Miscellaneous Conveying Auger
2.4.8. Concave Plate Screen
- (1)
- Concave plate screen structure
- (2)
- Peanut-picking gap and wrapping angle
2.5. Analysis of the Operational Reliability of the Picking Roller
2.5.1. Static Analysis
2.5.2. Modal Analysis
2.6. Test Methods and Indicators
2.6.1. Test Methods
2.6.2. Test Indicators
3. Results
3.1. Analysis of Static Simulation Results
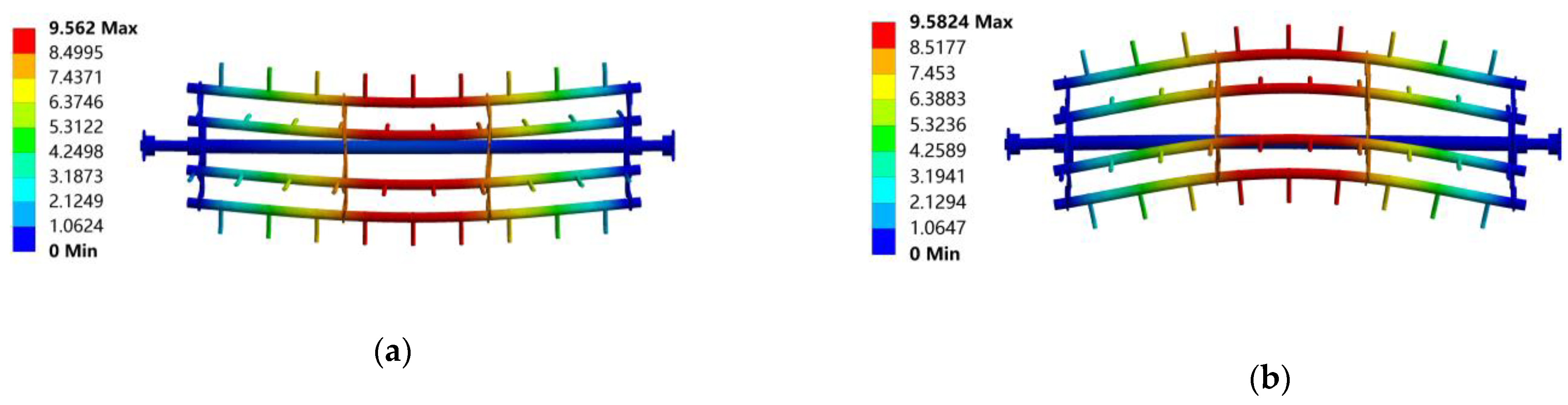
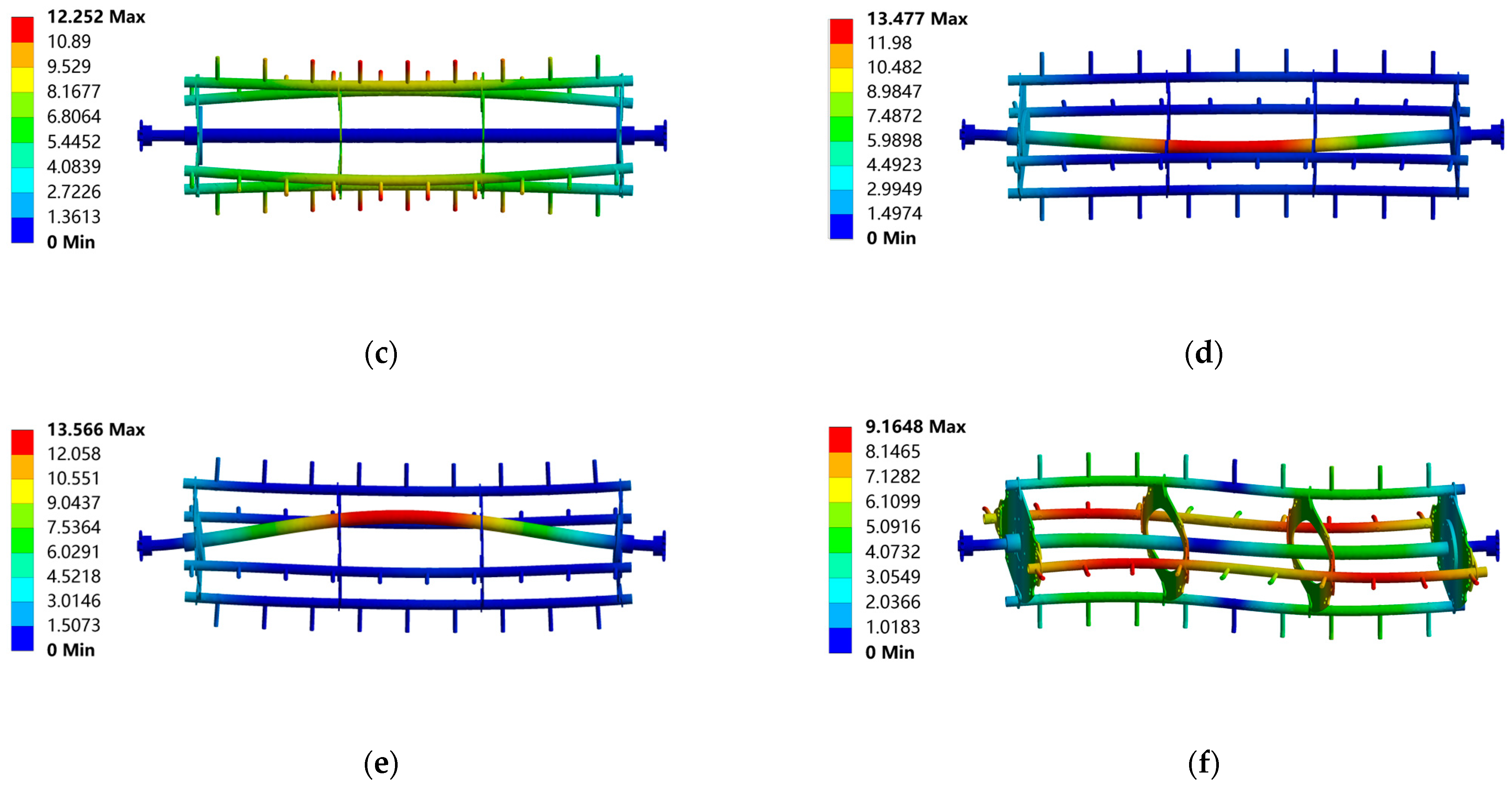
3.2. Analysis of Modal Simulation Results
3.3. Test Results
3.4. Analysis of Test Results
3.4.1. Regression Model Building
3.4.2. Regression Equation Analysis
3.5. Analysis of the Influence of Interaction Factors on Picking Performance
3.5.1. Analysis of the Influence of Interaction Factors on Picking Purity Rate
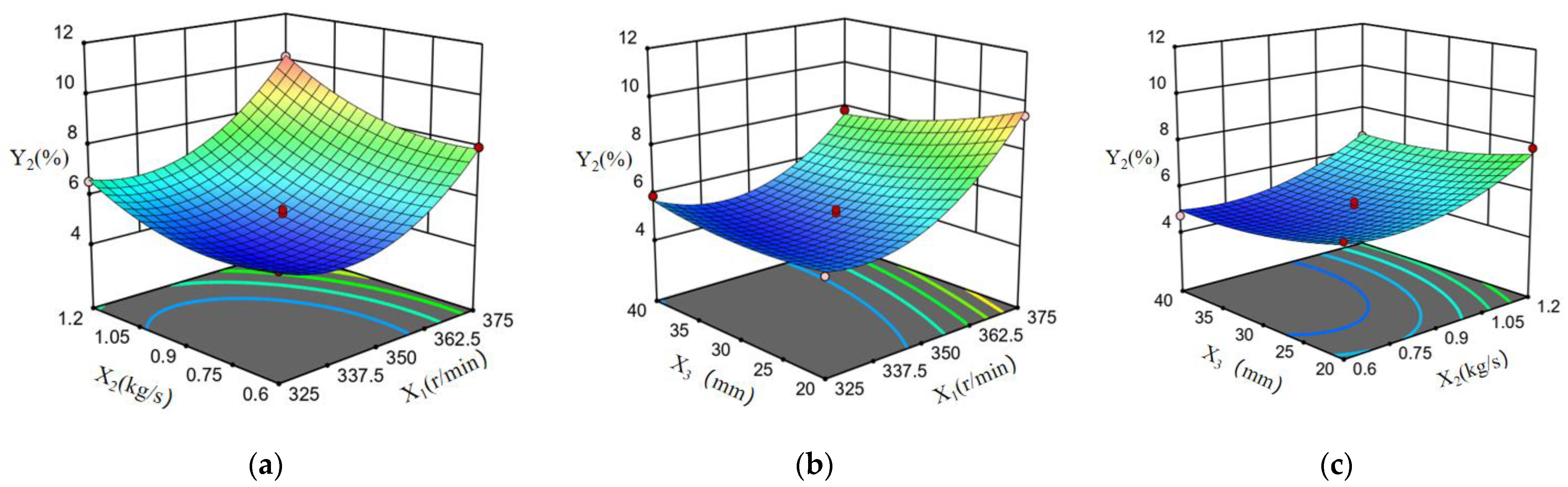
3.5.2. Analysis of the Influence of Interaction Factors on the Breakage Rate
3.6. Determination of Optimal Operating Parameters
3.7. Field Test Validation
4. Discussion
5. Conclusions
- (1)
- According to the topography and peanut planting mode in hilly areas, a peanut-picking device for peanut harvesting in hilly areas is designed, and its working process and key components were designed and analyzed. ANSYS Workbench software is used to check the reliability of the designed peanut-picking device, and its maximum stress is 25.234 M Pa, and the frequency range of vibration is 50.89~129.24 Hz, which met the operation requirements.
- (2)
- The test results showed that when the speed of the peanut-picking roller is 341.93 r/min, the feeding amount is 0.75 kg/s, and the picking gap is 32.12 mm, the picking purity rate and breakage rate are 97.97% and 4.63%, respectively. The field test showed that the picking purity rate is 98.95%, and the error is 0.98% compared with the predicted value when the speed of the picking roller is 342 r/min, the feeding amount is 0.75 kg/s, and the picking gap is 32 mm. The pod breakage rate was 4.23%, and the error was 0.91% compared with the predicted value, indicating that the optimized model was reliable and predictive.
- (3)
- The fresh-peanut-picking crawler combine harvester is suitable for peanut planting in hilly areas, with a wide range of adaptability and strong pertinence. Fresh peanut seedlings have strong toughness, and the form and material of peanut-picking teeth are more demanding. Due to terrain limitations, it is necessary to make the equipment lightweight and simplified and then optimize the design of peanut-picking rollers to improve the efficiency of peanut picking.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Gu, F.; Hu, Z.; Peng, B.; Xie, H.; Hu, L. General Situation and Mechanization Development Strategy of Peanut Production in China. Chin. Agric. Mech. 2010, 3, 8–10. [Google Scholar]
- Guan, J. Application and Optimization of Peanut Harvesting Machinery in Hilly Areas. Use Maint. Agric. Mach. 2023, 5, 80–82. [Google Scholar]
- Zeng, Y.; Fang, Z. Status and Development Strategy of Full Mechanization of Peanut in the Hilly Area of South China. Agric. Eng. Equip. 2021, 48, 4–9. [Google Scholar]
- Kang, L.; Ma, C.; Long, L.; Ai, Z.; He, Q.; Xu, S.; Yan, X. The Current Status and Development Analysis of Social Service of Agricultural Machinery Social Service in China. Agric. Mach. Use Maint. 2023, 1, 48–52. [Google Scholar]
- Zhang, Y. Research on Geographic Concentration Changes of China’s Peanut. Ph.D. Thesis, China Agricultural University, Beijing, China, 2015. [Google Scholar]
- Wang, S.; Hu, Z.; Yao, L.; Peng, B.; Wang, B.; Wang, Y. Simulation and Parameter Optimisation of Pickup Device for Full-Feed Peanut Combine Harvester. Comput. Electron. Agric. 2022, 192, 106602. [Google Scholar] [CrossRef]
- Liu, X.; Lü, Q.; Yang, L.; Li, G. Design and Test of Peanut Root-Disk Full-Feeding Longitudinal Axial Flow Pod-Picking Device. Agronomy 2023, 13, 1103. [Google Scholar] [CrossRef]
- Shi, L.; Wang, B.; Hu, Z.; Yang, H. Mechanism and Experiment of Full-Feeding Tangential-Flow Picking for Peanut Harvesting. Agriculture 2022, 12, 1448. [Google Scholar] [CrossRef]
- Yang, R. Study on Design Principle and Tests for Main Parts of 4HQL-2 Peanut Combine. Ph.D. Thesis, Shenyang Agricultural University, Shenyang, China, 2012. [Google Scholar]
- Shang, S.; Li, G.; Yang, R.; Sun, T.; Wang, Y.; Lian, Z. Development of 4HQL-2 Type Whole-Feed Peanut Combine. Trans. CSAE 2009, 25, 125–130. [Google Scholar]
- Ma, J.; Qu, J.; Khan, N.; Zhang, H. Towards Sustainable Agricultural Development for Edible Beans in China: Evidence from 848 Households. Sustainability 2022, 14, 9328. [Google Scholar] [CrossRef]
- Kong, X.; Wang, D.; Li, X.; He, X.; Shi, Z.; Wang, D.; Ji, R.; Liu, Y. Peanut Combine Harvester Design and Test of Control System for Fruit Picking Drum. Agric. Mech. Res. 2023, 45, 104–110. [Google Scholar]
- Liu, J. Study on Top-Feed Tangential-Flow Double-Drum Picker for Both Dry and Wet Peanuts. Master’s Thesis, Jilin Agricultural University, Changchun, China,, 2023. [Google Scholar]
- Wang, S.; Hu, Z.; Xu, H.; Cao, M.; Yu, Z.; Peng, B. Design and Test of Pickup and Conveyor Device for Full-Feeding Peanut Pickup Harvester. Trans. CSAE 2019, 35, 20–28. [Google Scholar]
- Hu, Z.; Wang, H.; Peng, B.; Cheng, Y.; Wu, F.; Zhang, Y. Optimized Design and Experiment on Semi-feeding Peanut Picking Device. Trans. CSAM 2012, 43, 131–136. [Google Scholar]
- Xu, H.; Zhang, P.; Zhang, Y.; Wang, S.; Yu, Z.; Gu, F. Design and Experiment of Peanut Pod-picking and Conveying Device of Multistage Tangential Flow Type Peanut Combine. Trans. CSAM 2023, 54, 52–60. [Google Scholar]
- Zhou, D. Experimental Study on Full-Feeding Picking Characteristics of Peanut Combined Harvesting. Master’s Thesis, Chinese Academy of Agricultural Sciences, Beijing, China, 2018. [Google Scholar]
- Fang, Q.; Li, G.; Chen, L.; Wang, Y.; Jiang, Y.; Du, F. Innovative Design on Picking Device for Peanut Combine Harvester. J. Hebei Norm. Univ. Sci. Technol. 2021, 35, 51–57. [Google Scholar]
- Chen, Z.; Guan, M.; Gao, L.; Chen, L.; Ma, F.; Dong, H. Design and Test on Axial Flow Peanut Picking Device with Screw Bending-Tooth. Trans. CSAM 2016, 47, 106–113. [Google Scholar]
- Wang, Q.; Yu, Z.; Zhang, Y.; Li, J.; Peng, B.; Wang, B.; Hu, Z. Experimental Study of a 4HLB-4 Half-Feed Four-Row Peanut Combine Harvester. Agronomy 2022, 12, 3094. [Google Scholar] [CrossRef]
- Zhu, W. Study on Finite Element Analysis of Peanut Harvester Picking Process and Optimization of Key Picking Mechanism Structure and Parameter. Master’s Thesis, Qingdao University of Technology, Qingdao, China, 2015. [Google Scholar]
- Li, D.; Shang, S.; He, X.; Zhao, Z.; Chang, Z.; Wang, Y.; Wang, D. Experiments and Analysis of a Peanut Semi-Feeding Picking Mechanism Based on the JKR Model. Agriculture 2022, 12, 1418. [Google Scholar] [CrossRef]
- Wang, R.; Zhao, X.; Ji, J.; Jin, X.; Li, B. Design and Performance Analysis of Tangential-Axial Flow Threshing Device for Oat Harvester. Int. J. Agric. Biol. Eng. 2021, 14, 61–67. [Google Scholar] [CrossRef]
- Li, S.; Shang, S.; Yu, Y.; Wang, D.; Yang, R.; Hou, Q. Researching Design and Experiments of Spring Tined Type Picking Peanut Mechanism. Agric. Mech. Res. 2015, 37, 136–139. [Google Scholar]
- Yang, H.; Cao, M.; Wang, B.; Hu, Z.; Xu, H.; Wang, S.; Yu, Z. Design and Test of a Tangential-Axial Flow Picking Device for Peanut Combine Harvesting. Agriculture 2022, 12, 179. [Google Scholar] [CrossRef]
- Ding, B.; Liang, Z.; Qi, Y.; Ye, Z.; Zhou, J. Improving Cleaning Performance of Rice Combine Harvesters by DEM–CFD Coupling Technology. Agriculture 2022, 12, 1457. [Google Scholar] [CrossRef]
- Hu, Y.; Feng, J.; Qiao, Y.; Yu, C.; Luo, W.; Zhang, K.; Liu, R.; Han, R. Research and Validation of Vibratory Harvesting Device for Red Jujube Based on ADAMS and ANSYS. Agriculture 2023, 13, 1334. [Google Scholar] [CrossRef]
- Han, D.; Zhang, H.; Li, G.; Wang, G.; Wang, X.; Chen, Y.; Chen, X.; Wen, X.; Yang, Q.; Zhao, R. Development of a Bionic Picking Device for High Harvest and Low Loss Rate Pod Pepper Harvesting and Related Working Parameter Optimization Details. Agriculture 2024, 14, 859. [Google Scholar] [CrossRef]
- NY/T 502-2016; Ministry of Agriculture of People’s Republic of China Industry Standard—Peanut Harvester Operation Quality. Ministry of Agriculture of People’s Republic of China: Beijing, China, 2016.
- Guan, M. Research on Full-Feeding Peanut Picking Test Device and Key Components of Peanut Picker. Ph.D. Thesis, Shenyang Agricultural University, Shenyang, China, 2017. [Google Scholar]
- Fu, G.; Guo, X. Finite Element of a Crankshaft of a Piston Engine Based on ANSYS Workbench Modal Analysis. Technol. Innov. Appl. 2018, 6, 20–21. [Google Scholar]
- Bhandari, S.; Jotautienė, E. Vibration Analysis of a Roller Bearing Condition Used in a Tangential Threshing Drum of a Combine Harvester for the Smooth and Continuous Performance of Agricultural Crop Harvesting. Agriculture 2022, 12, 1969. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Design Values |
|---|---|
| Type | Fully fed, self-propelled track |
| Machine dimensions Size (Length × width × height)/(mm × mm × mm) | 3500 × 1500 × 1600 |
| Total weight/(kg) | 1300 |
| Engine power/(kw) | 20.2 |
| Engine rated speed/(r/min) | 2200 |
| Most suitable row spacing/(mm) | 700 |
| Working width/(mm) | 1040 |
| Efficiency/(hm2/h) | 1–2.5 |
| Concave Screen Category | Length (mm) | Sieve Grid Size (mm) | Wrap Corners (°) |
|---|---|---|---|
| first-stage concave plate screen | 350 | 65 × 70 | 77 |
| secondary concave plate screen | 632 | 65 × 70 | 140 |
| third-stage concave plate screen | 246 | 53 × 70 | 65 |
| Material | Poisson’s Ratio | Elastic Modulus (M Pa) | Hardness (HB) | Density (kg/m−3) | Yield Strength (M Pa) |
|---|---|---|---|---|---|
| 45 Steel | 0.3 | 200 | 197 | 7850 | 355 |
| Levels | Picking Roller Speed X1 (r/min) | Feeding Amount X2 (kg/s) | Picking Gap X3 (mm) |
|---|---|---|---|
| −1 | 325 | 0.6 | 20 |
| 0 | 350 | 0.9 | 30 |
| 1 | 375 | 1.2 | 40 |
| Picking Rollers | Total Deformation (mm) | Strain (×10−4 mm) | Stress (M Pa) |
|---|---|---|---|
| maximum | 0.138 | 1.2721 | 25.234 |
| minimum | 0.000 | 9.0545 × 10−7 | 5.7047 × 10−6 |
| Picking Roller | Model 1 | Model 2 | Model 3 | Model 4 | Model 5 | Model 6 |
|---|---|---|---|---|---|---|
| Excitation frequency (Hz) | 50.89 | 51.98 | 70.04 | 81.67 | 82.80 | 129.24 |
| Maximum deformation (mm) | 9.52 | 9.58 | 12.25 | 13.48 | 13.57 | 9.16 |
| No. | X1 (r/min) | X2 (kg/s) | X3 (mm) | Y1 (%) | Y2 (%) |
|---|---|---|---|---|---|
| 1 | 375 | 0.6 | 30 | 98.91 | 7.98 |
| 2 | 350 | 0.6 | 20 | 98.52 | 5.96 |
| 3 | 350 | 0.9 | 30 | 98.63 | 5.45 |
| 4 | 325 | 0.9 | 40 | 95.24 | 5.88 |
| 5 | 375 | 0.9 | 40 | 97.64 | 7.82 |
| 6 | 350 | 1.2 | 40 | 96.34 | 6.65 |
| 7 | 325 | 0.6 | 30 | 95.81 | 5.45 |
| 8 | 375 | 0.9 | 20 | 98.93 | 9.43 |
| 9 | 325 | 0.9 | 20 | 95.75 | 5.28 |
| 10 | 350 | 0.9 | 30 | 98.68 | 5.28 |
| 11 | 350 | 0.6 | 40 | 96.36 | 4.72 |
| 12 | 375 | 1.2 | 30 | 95.98 | 10.14 |
| 13 | 350 | 0.9 | 30 | 98.47 | 5.02 |
| 14 | 350 | 0.9 | 30 | 98.09 | 5.32 |
| 15 | 350 | 1.2 | 20 | 95.39 | 7.86 |
| 16 | 350 | 0.9 | 30 | 98.85 | 4.95 |
| 17 | 325 | 1.2 | 30 | 93.64 | 6.54 |
| Source | Rate of picking purity, Y1 | |||
| Sum of squares | Degree of freedom | F value | Significant level p | |
| Model | 43.04 | 9 | 39.27 | <0.0001 ** |
| X1 | 15.18 | 1 | 124.66 | <0.0001 ** |
| X2 | 8.51 | 1 | 69.87 | <0.0001 ** |
| X3 | 1.13 | 1 | 9.3 | 0.0186 * |
| X1X2 | 0.1444 | 1 | 1.19 | 0.3122 |
| X1X3 | 0.1521 | 1 | 1.25 | 0.3006 |
| X2X3 | 2.42 | 1 | 19.86 | 0.0029 ** |
| X12 | 5.19 | 1 | 42.66 | 0.0003 ** |
| X22 | 7.65 | 1 | 62.85 | <0.0001 ** |
| X32 | 1.24 | 1 | 10.2 | 0.0152 * |
| Residual | 0.8524 | 7 | ||
| Lack of fit | 0.5213 | 3 | 2.1 | 0.2431 |
| Pure error | 0.3311 | 4 | ||
| Total | 43.89 | 16 | ||
| Source | Rate of breakage, Y2 | |||
| Sum of squares | Degree of freedom | F value | Significant level p | |
| Model | 42.14 | 9 | 68.34 | <0.0001 ** |
| X1 | 18.67 | 1 | 272.46 | <0.0001 ** |
| X2 | 6.27 | 1 | 91.46 | <0.0001 ** |
| X3 | 1.5 | 1 | 21.84 | 0.0023 ** |
| X1X2 | 0.2862 | 1 | 4.18 | 0.0802 |
| X1X3 | 1.22 | 1 | 17.82 | 0.0039 ** |
| X2X3 | 0.0002 | 1 | 0.0033 | 0.9559 |
| X12 | 10.3 | 1 | 150.38 | <0.0001 ** |
| X22 | 2.43 | 1 | 35.43 | 0.0006 ** |
| X32 | 0.4704 | 1 | 6.87 | 0.0344 * |
| Residual | 0.4796 | 7 | ||
| Lack of fit | 0.3015 | 3 | 2.26 | 0.224 |
| Pure error | 0.1781 | 4 | ||
| Total | 42.62 | 16 | ||
| Items | X1 (r/min) | X2 (kg/s) | X3 (mm) | Y1 (%) | Y2 (%) |
|---|---|---|---|---|---|
| Optimization solution | 341.93 | 0.75 | 32.12 | 97.97 | 4.63 |
| Verification solution | 342 | 0.75 | 32 | 98.95 | 4.23 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ling, J.; Shen, H.; Gu, M.; Hu, Z.; Zhao, S.; Wu, F.; Xu, H.; Gu, F.; Zhang, P. The Design and Optimization of a Peanut-Picking System for a Fresh-Peanut-Picking Crawler Combine Harvester. Agriculture 2024, 14, 1332. https://doi.org/10.3390/agriculture14081332
Ling J, Shen H, Gu M, Hu Z, Zhao S, Wu F, Xu H, Gu F, Zhang P. The Design and Optimization of a Peanut-Picking System for a Fresh-Peanut-Picking Crawler Combine Harvester. Agriculture. 2024; 14(8):1332. https://doi.org/10.3390/agriculture14081332
Chicago/Turabian StyleLing, Jie, Haiyang Shen, Man Gu, Zhichao Hu, Sheng Zhao, Feng Wu, Hongbo Xu, Fengwei Gu, and Peng Zhang. 2024. "The Design and Optimization of a Peanut-Picking System for a Fresh-Peanut-Picking Crawler Combine Harvester" Agriculture 14, no. 8: 1332. https://doi.org/10.3390/agriculture14081332
APA StyleLing, J., Shen, H., Gu, M., Hu, Z., Zhao, S., Wu, F., Xu, H., Gu, F., & Zhang, P. (2024). The Design and Optimization of a Peanut-Picking System for a Fresh-Peanut-Picking Crawler Combine Harvester. Agriculture, 14(8), 1332. https://doi.org/10.3390/agriculture14081332