
Design and Experiment of an Independent Leg-Type Chassis Vehicle Attitude Adjustment System

Abstract
1. Introduction
2. Working Principle
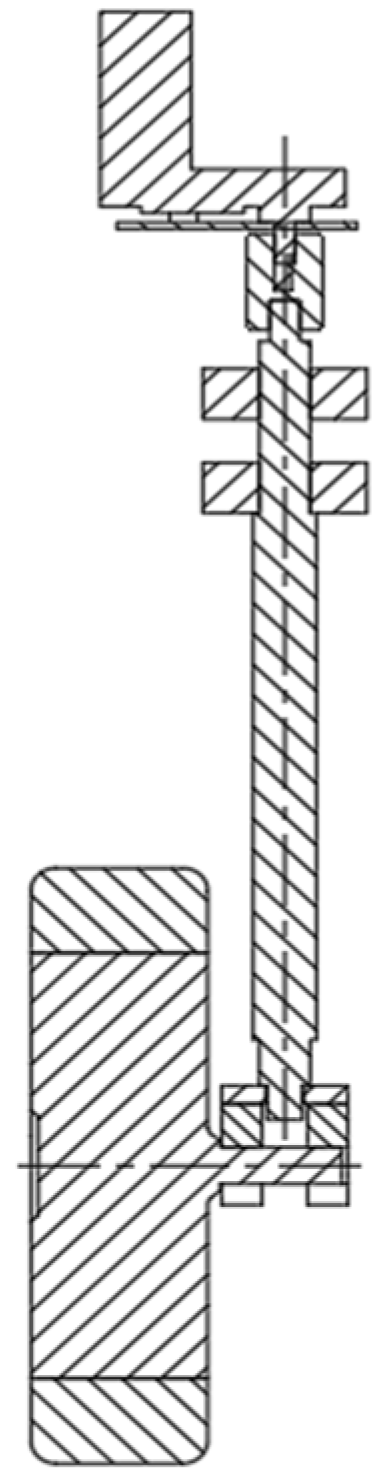
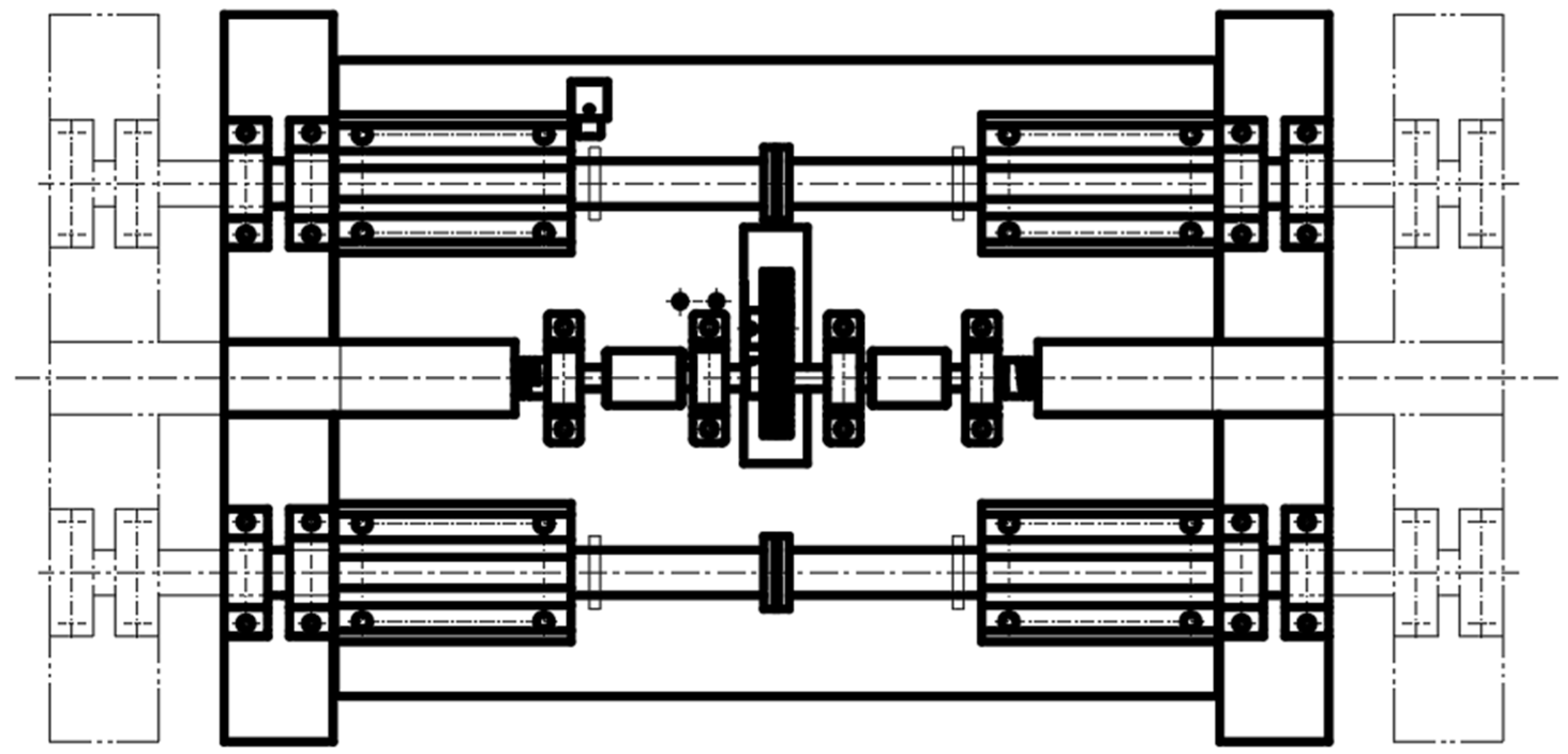
2.1. Structure and Principle of the Whole Machine
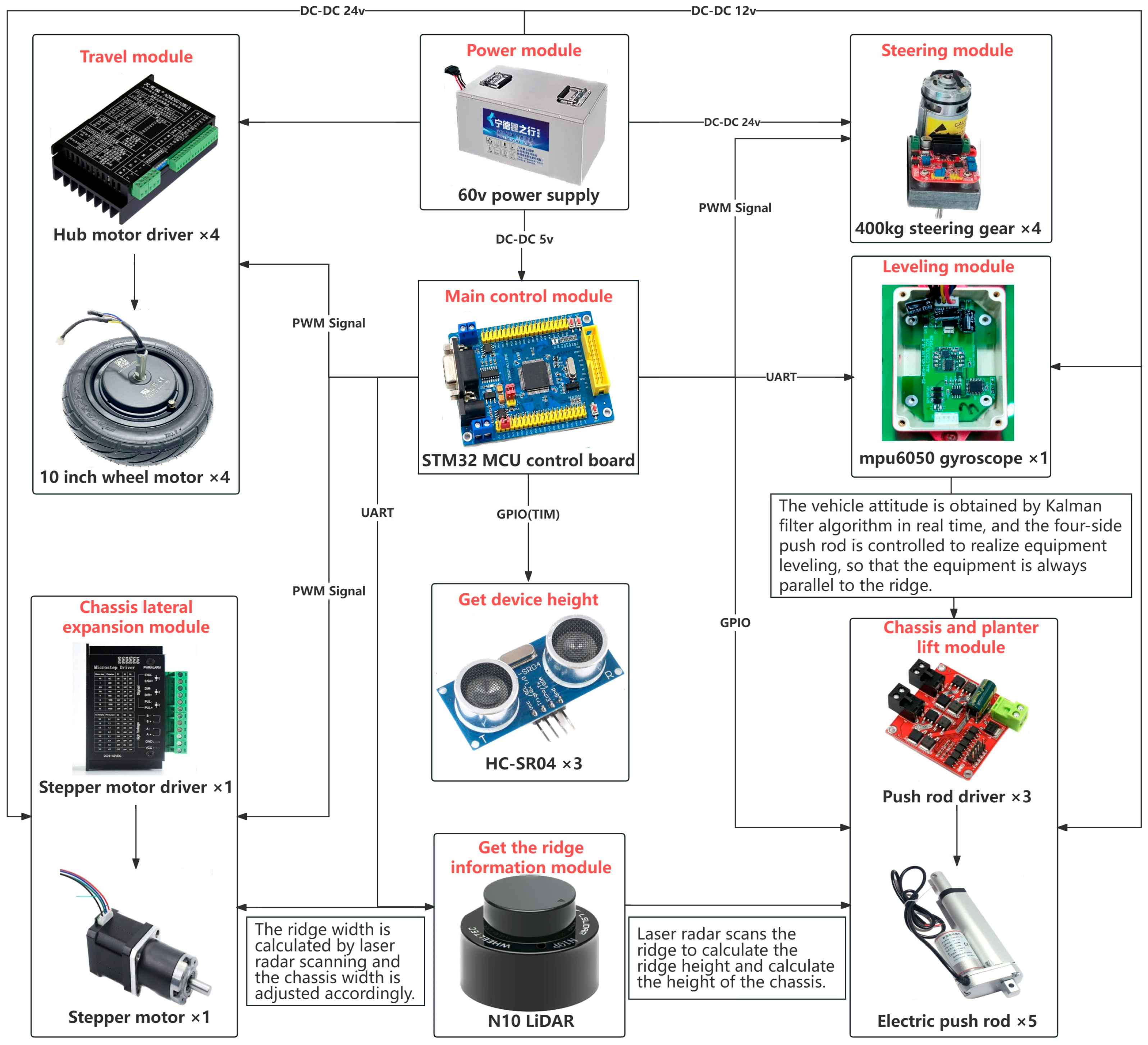
2.2. Control Principle of the Whole Machine
3. Key Control Principle Analysis
3.1. Selection of Working Components
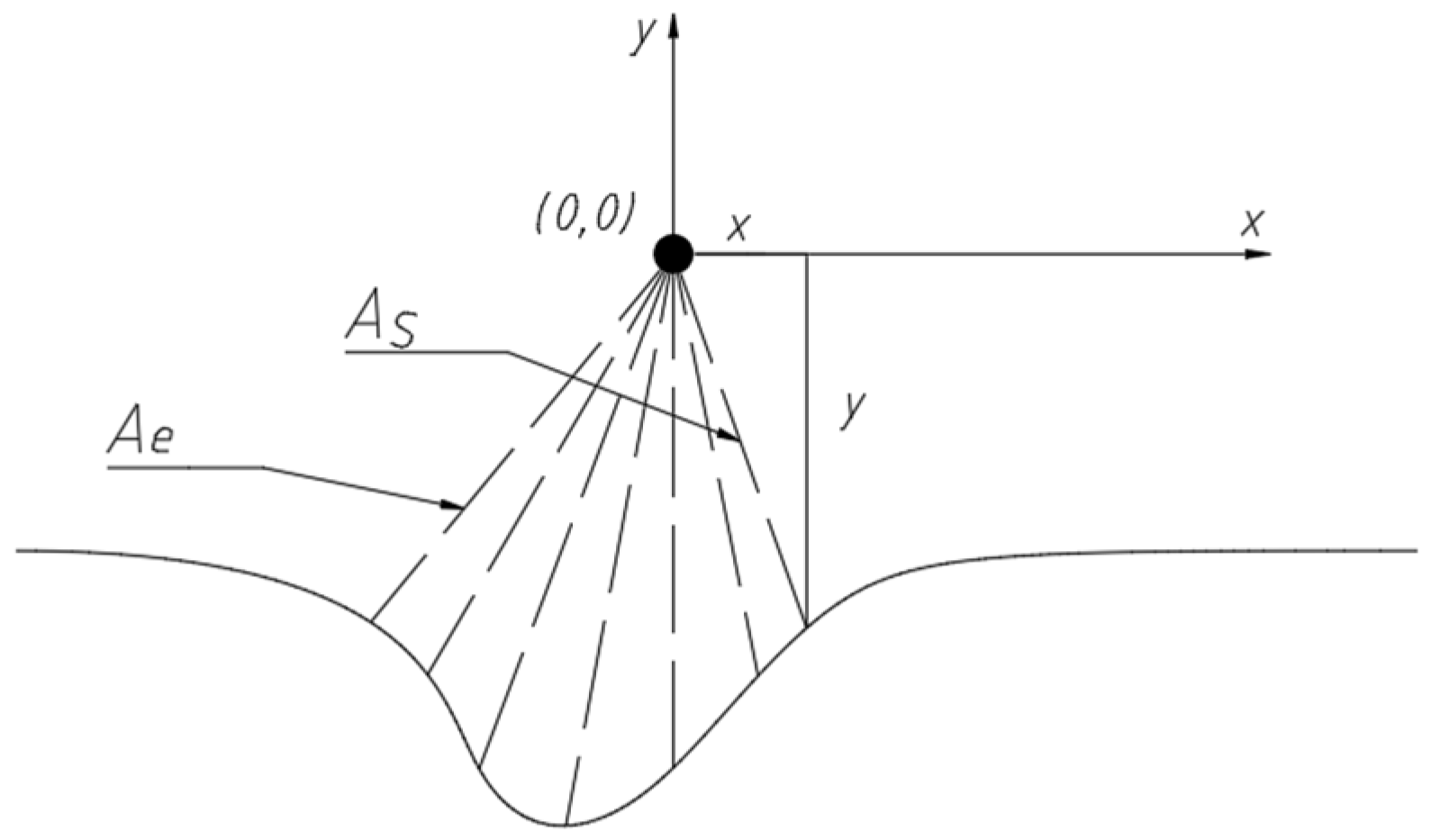
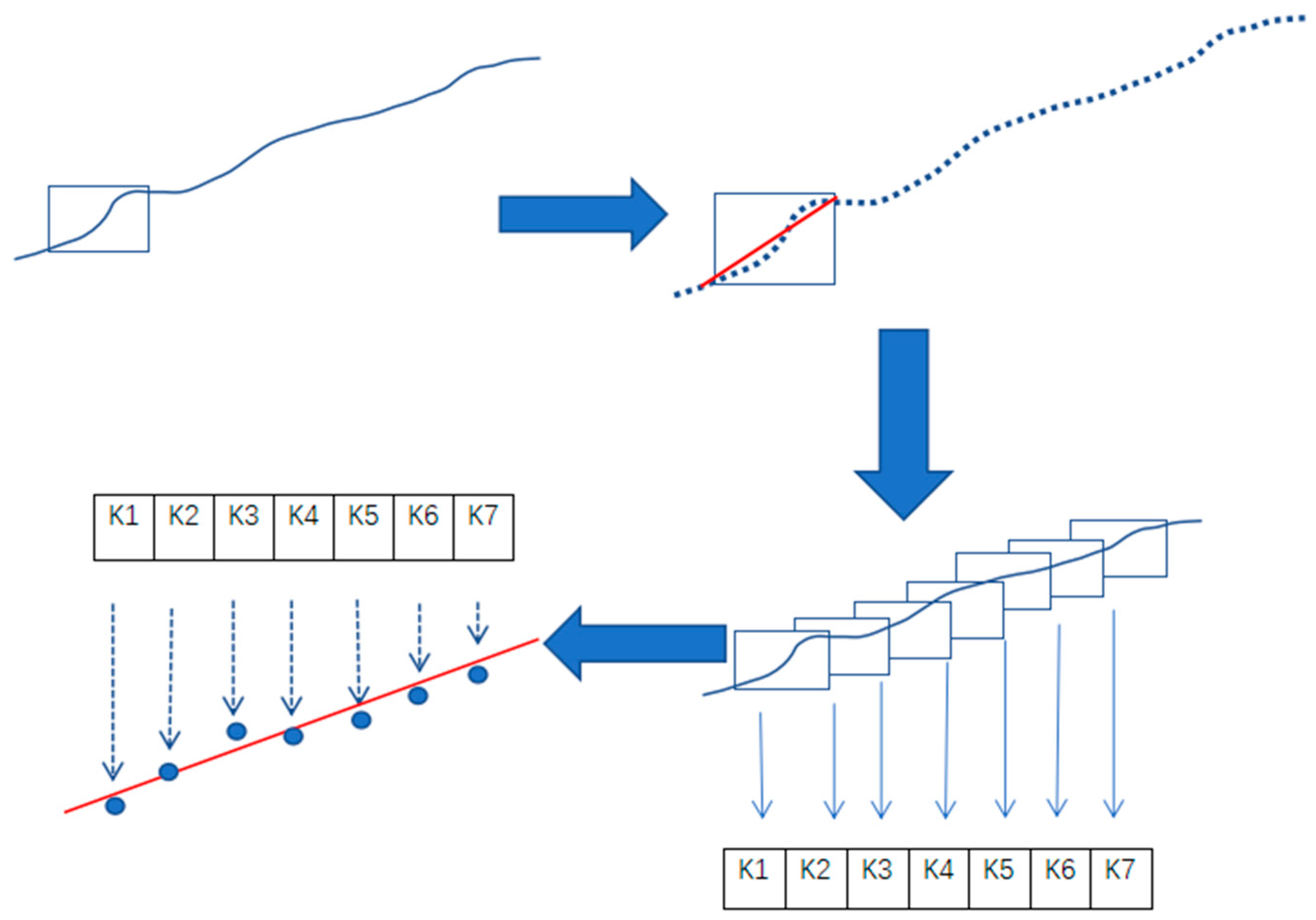
3.2. LiDAR Scanning Data and Data Preprocessing
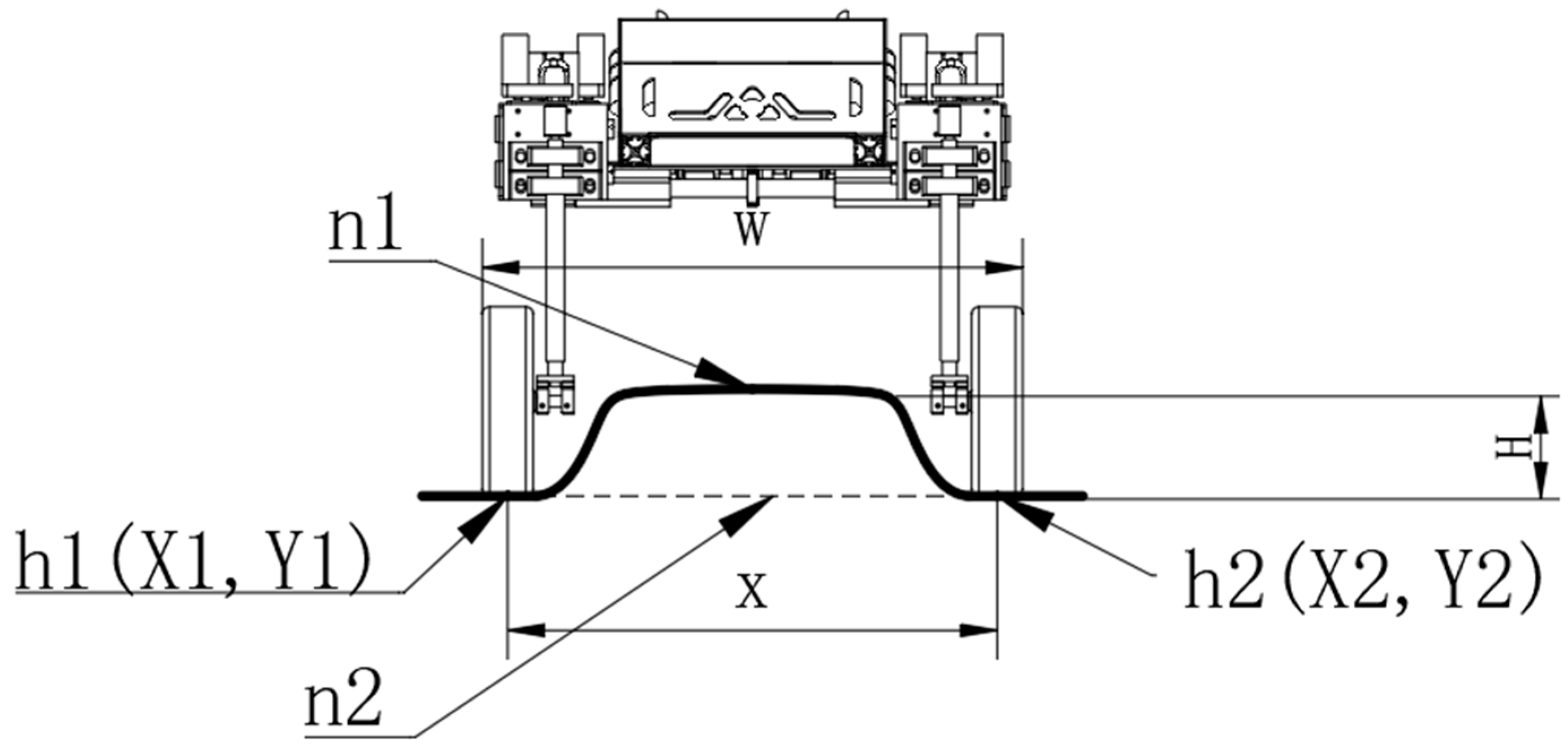
3.3. Stepper Motor Width Measurement Principle
3.4. Platform Ground Clearance Adjustment Technology Principle
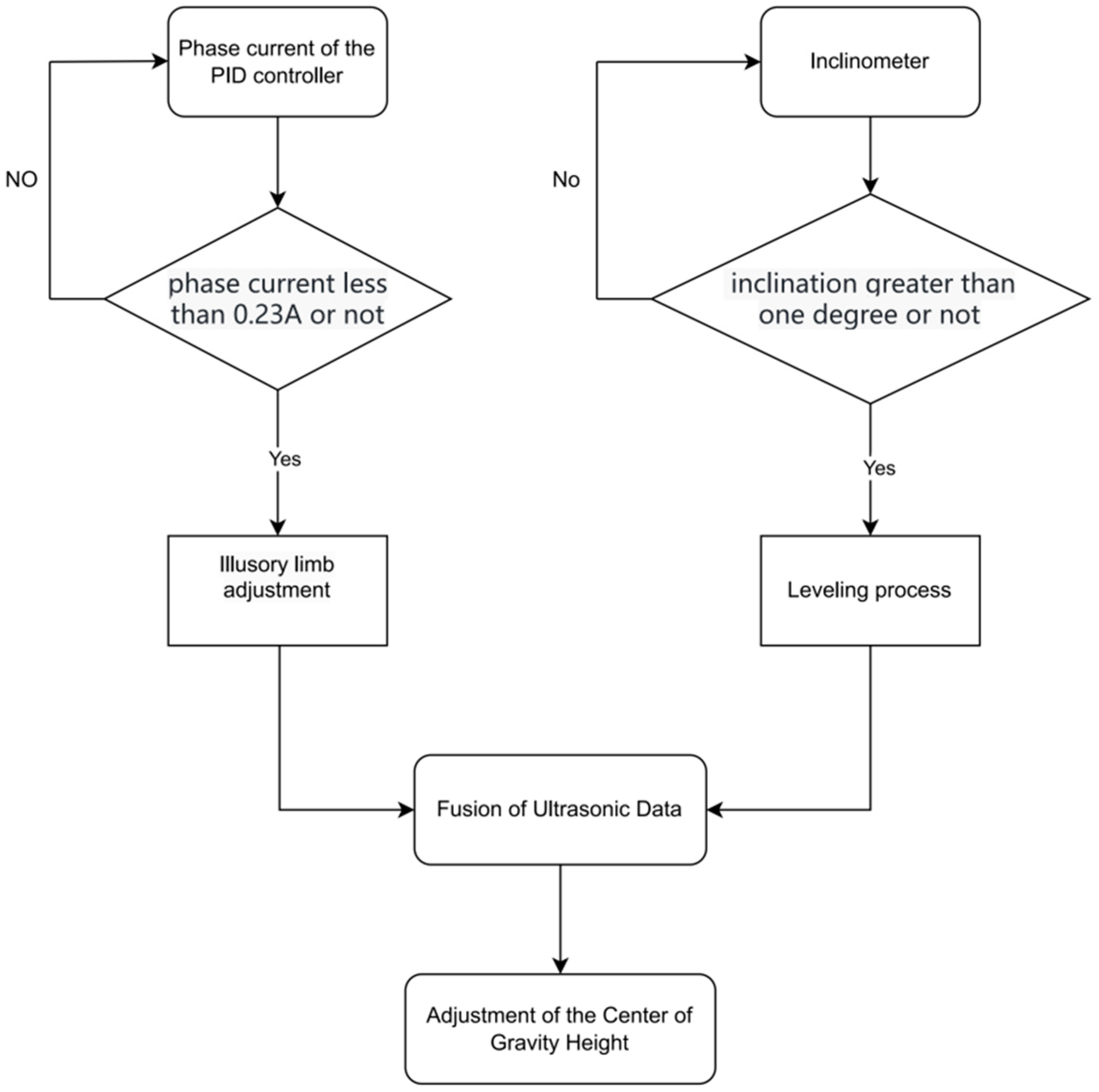
3.5. Platform Leveling Technology Principle
4. Field Experiments
4.1. Platform-Leveling Experiments
4.2. Platform Ultrasonic Ranging Experiment
4.3. LiDAR Scanning Experiment
4.4. Platform Adjustment Experiment (Continued)
5. Conclusions
- (1)
- This study designed a parameter-adaptive platform based on an independent pillar leg type, using dual parallelogram mechanisms to achieve the synchronous adjustment of the chassis ground clearance and wheelbase, using dual lead screw mechanisms to achieve the symmetrical adjustment of the wheelbase and using a leg pillar design to achieve the independent driving and steering of all four wheels. The results show that the platform has a maximum ground clearance adjustment range of 252–359 mm, a maximum wheelbase adjustment range of 700–850 mm, and strong obstacle-crossing capabilities based on soil ridges.
- (2)
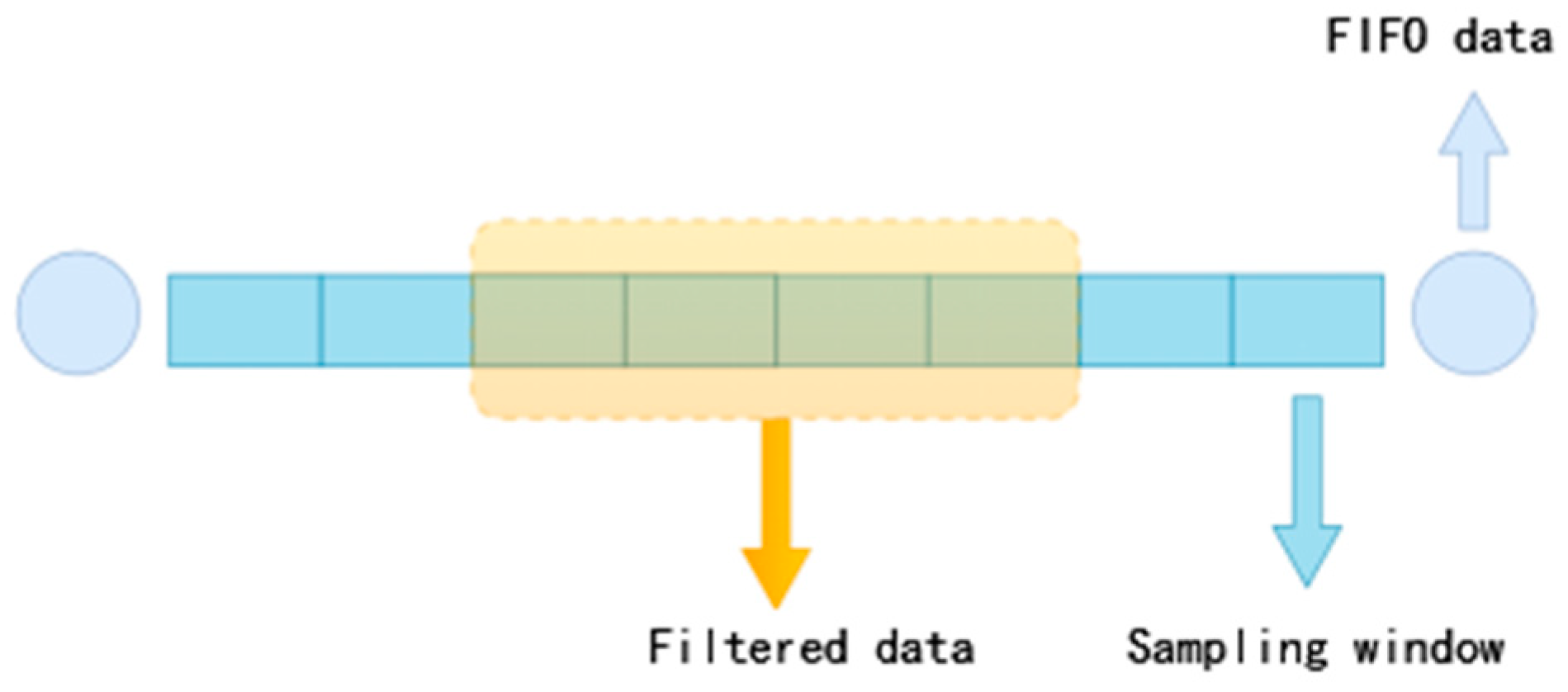
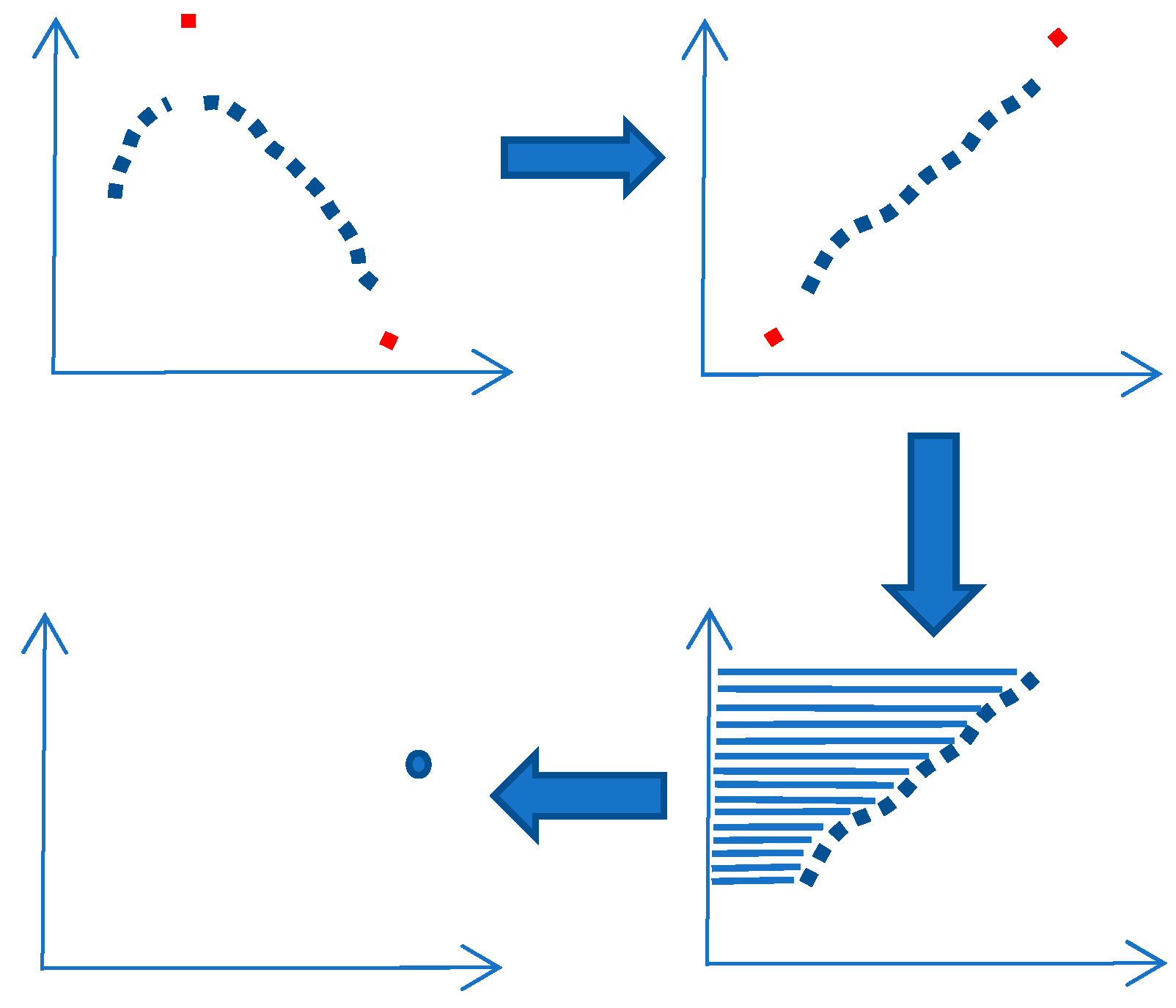
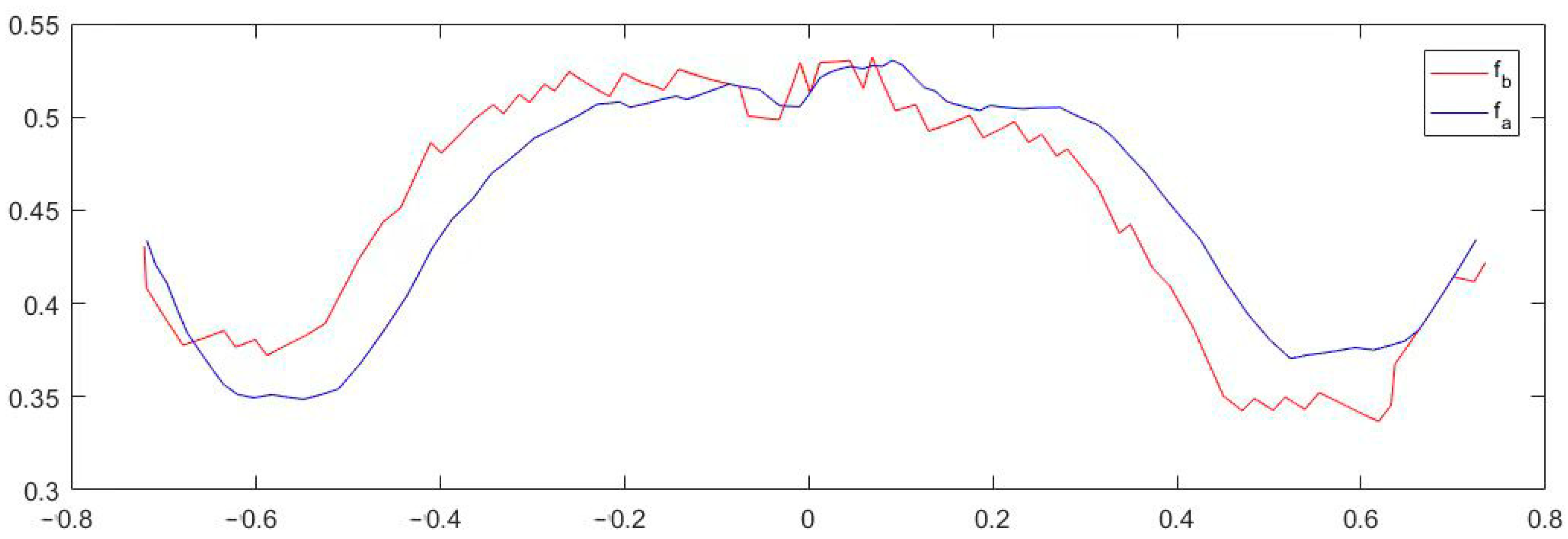
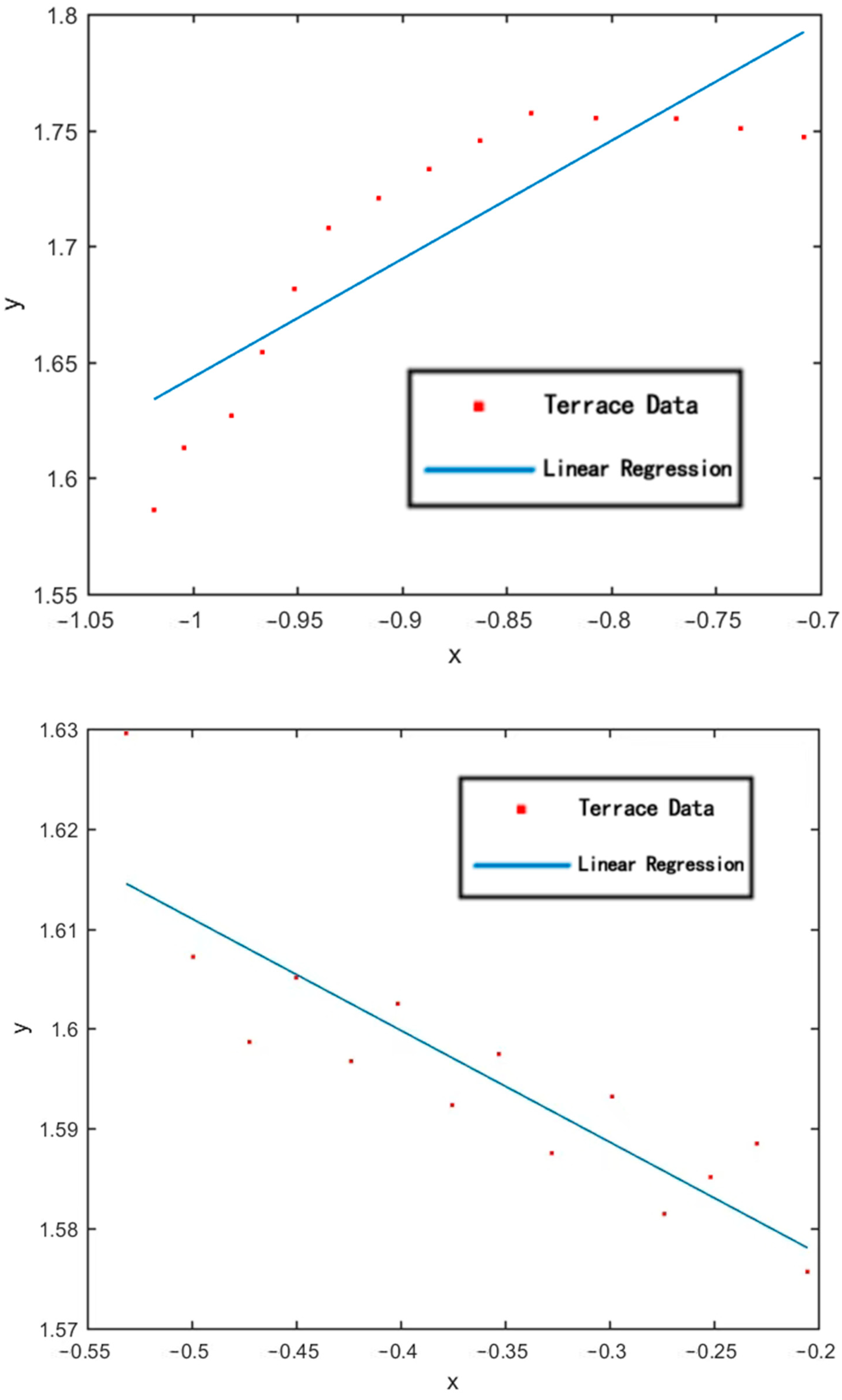
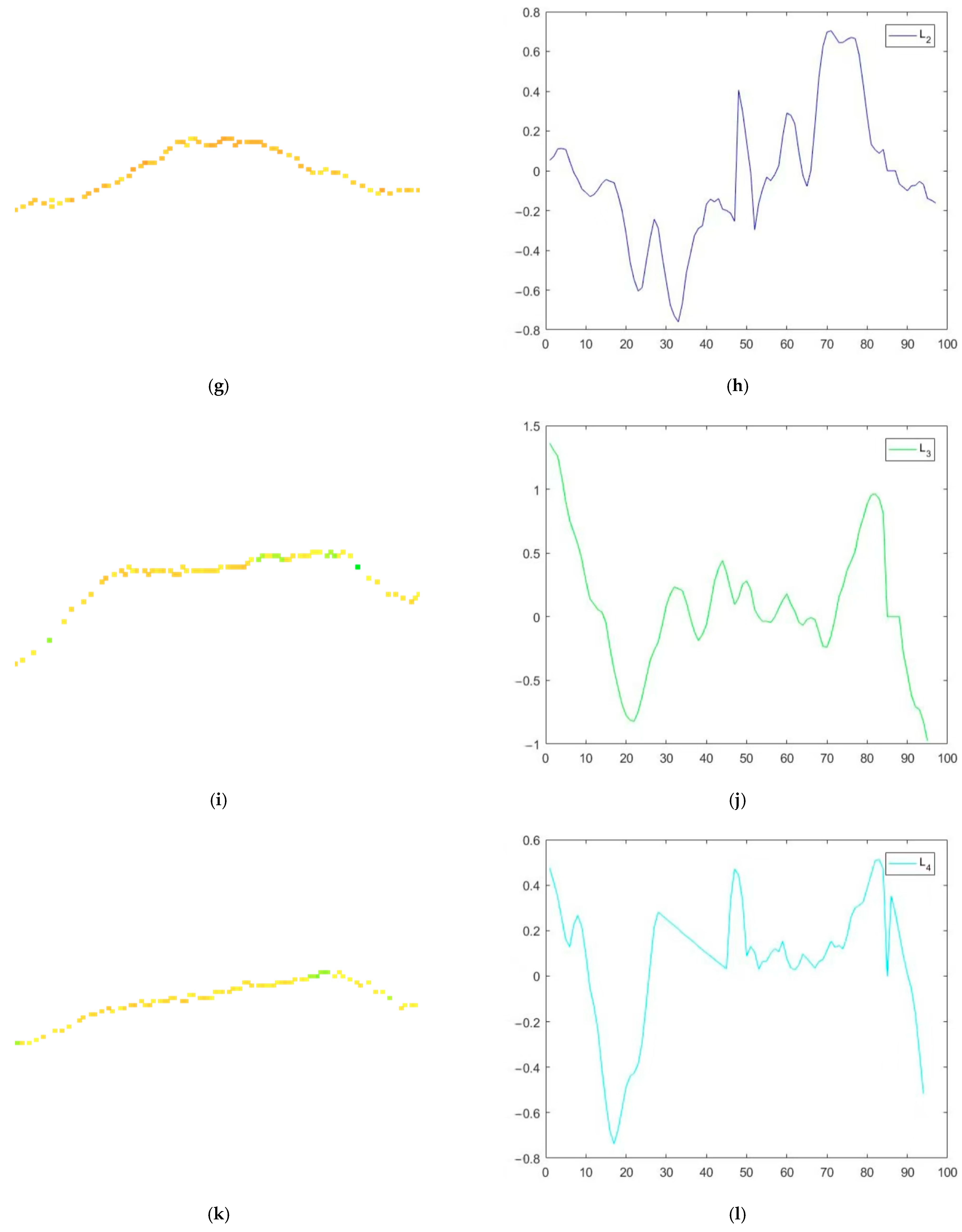
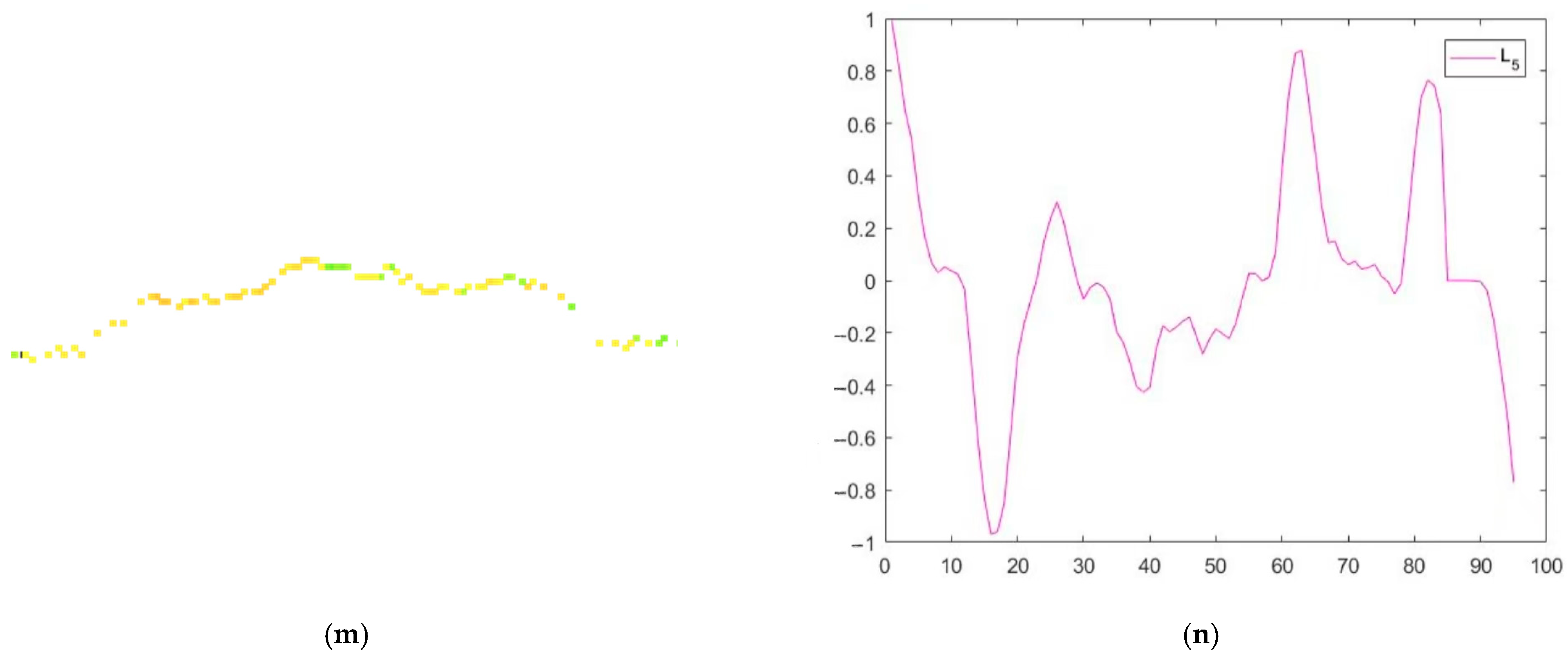
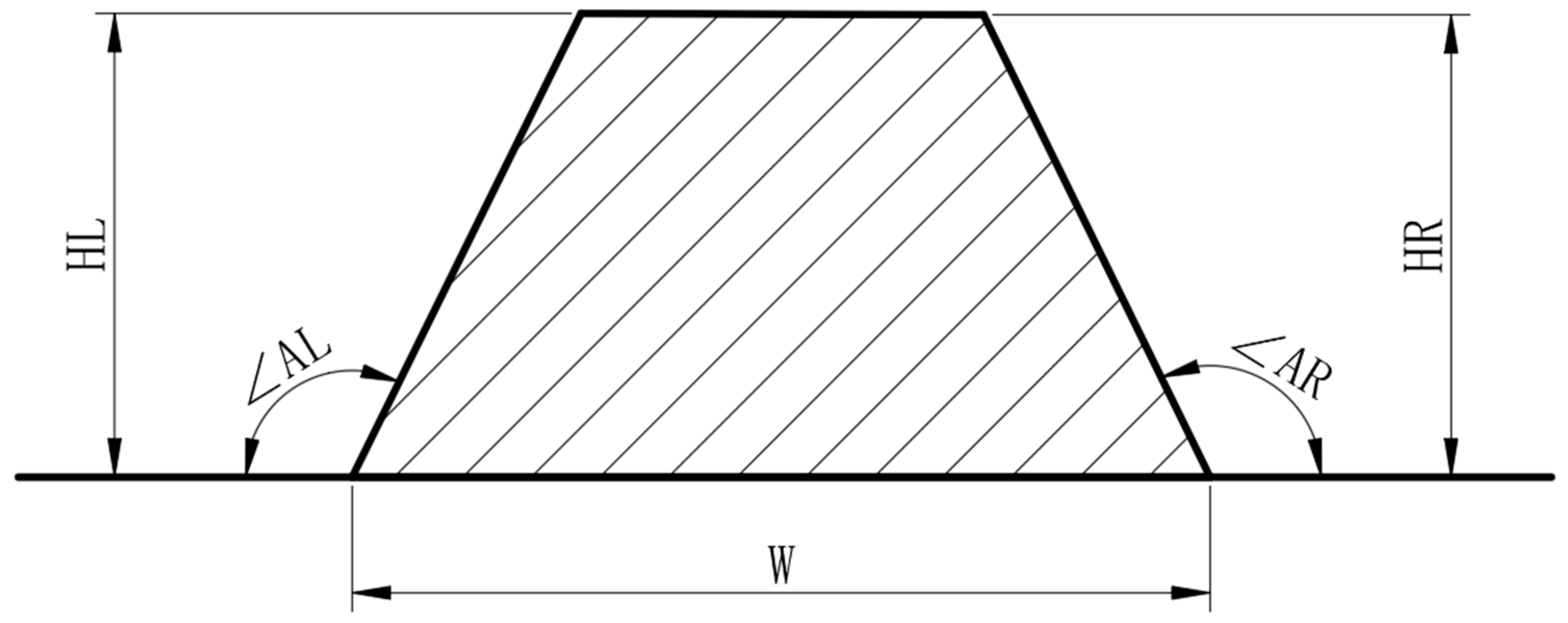
- This study derived a set of algorithms for calculating soil ridge parameters based on LiDAR scanning, and the platform combines absolute vehicle parameters for adaptive adjustment. The algorithm uses a sliding window filter and processes the filtered buffer zone data with a mean value, which not only reduces memory size but also makes the overall trend of the signal smoother. Then, the algorithm performs first and second linear regression on the filtered data to obtain soil ridge parameters. Experimental data show that the deviation of the LiDAR measured width from the actual width does not exceed 1.0 cm, and the deviation of the LiDAR measured height from the actual height does not exceed 1.0 cm. The platform’s actual adjusted width deviates from the actual soil ridge width by no more than 2.0 cm, and the platform’s actual adjusted height deviates from the actual soil ridge height by no more than 1.2 cm.
- (3)
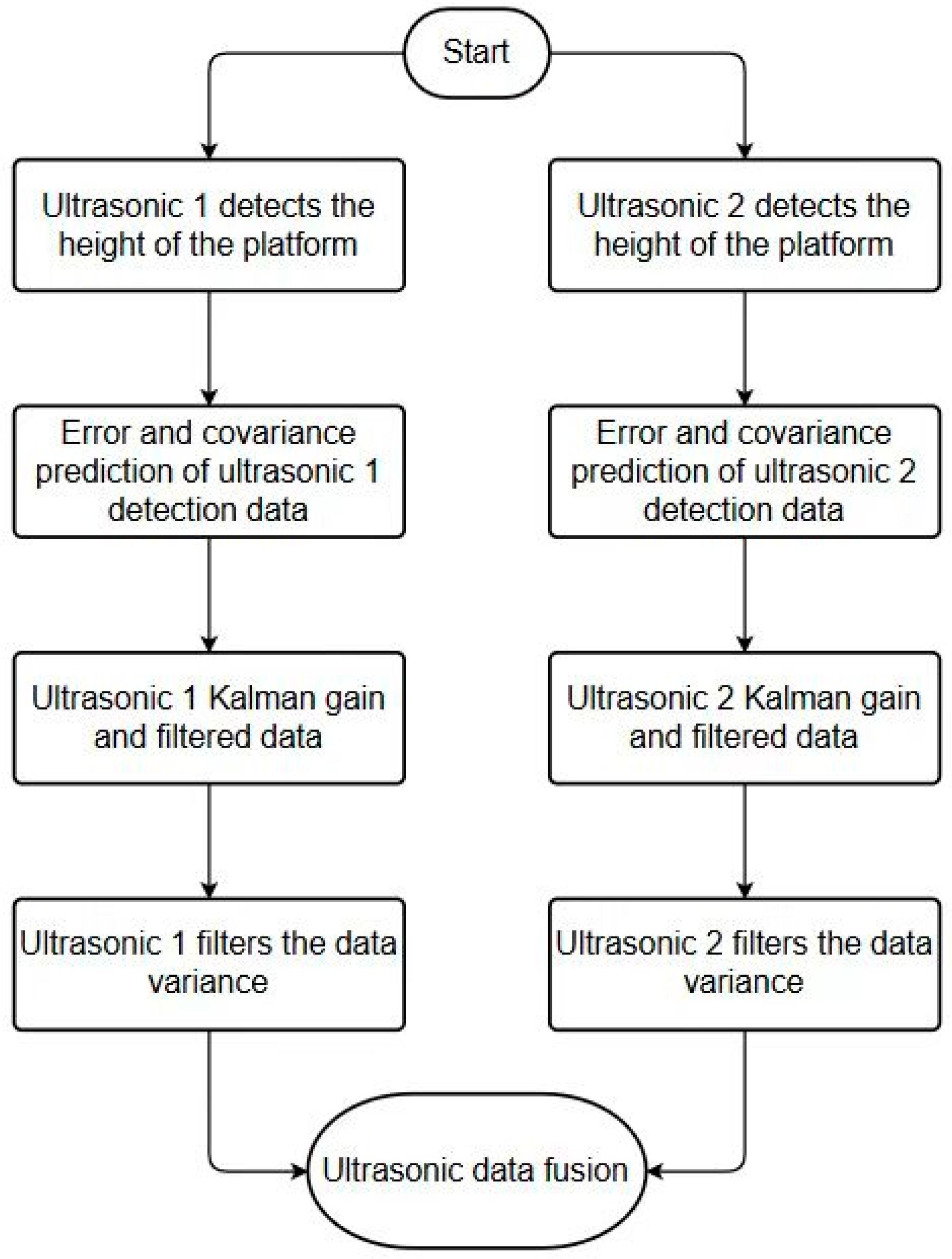
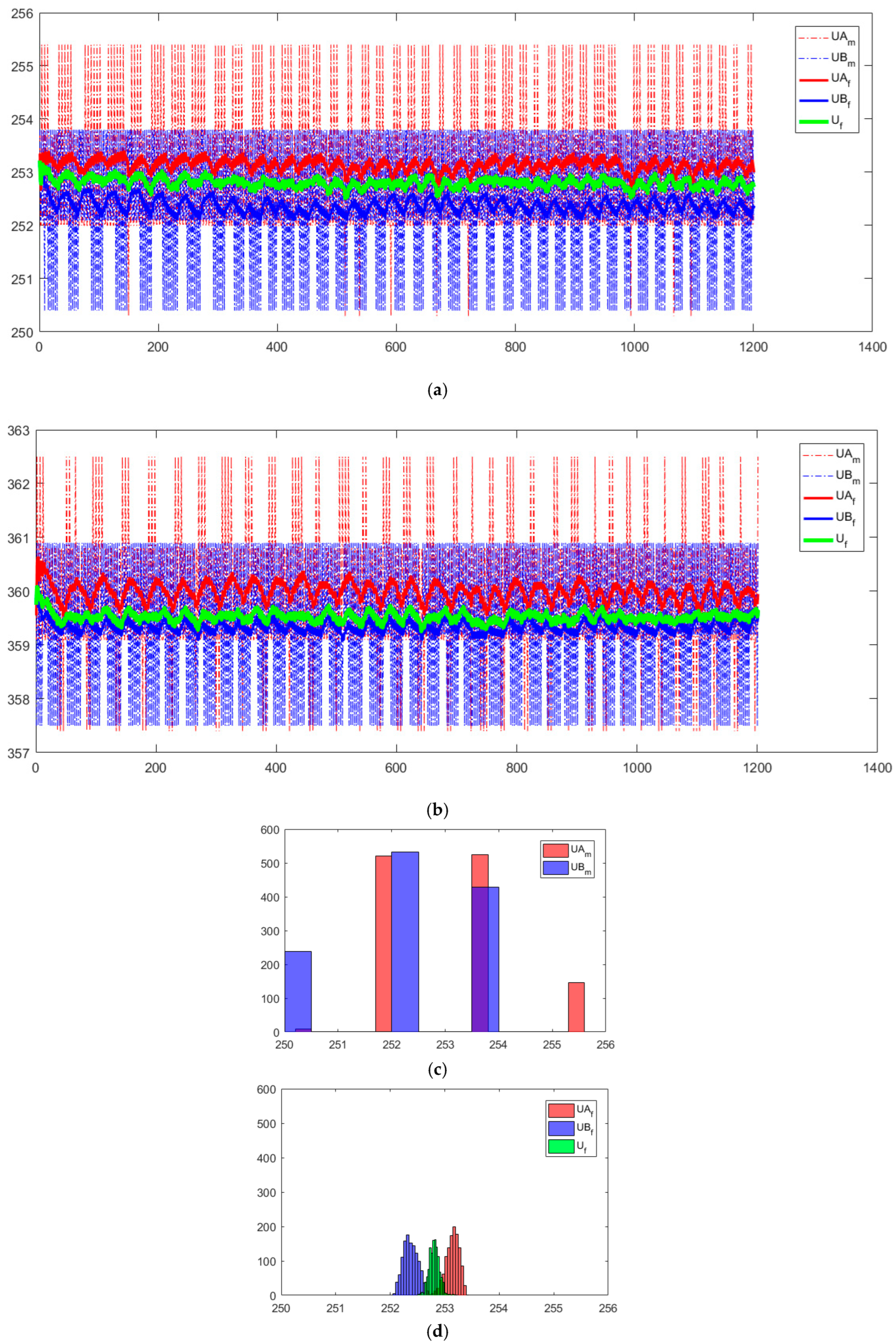
- To obtain the absolute parameters of the platform’s body, this study derived a set of platform-leveling algorithms, as well as Kalman filtering and Kalman filter fusion algorithms, based on the ultrasonic ranging modules on both sides. Experimental data show that, after platform leveling, the maximum variance of the pitch angle is 0.0474°, and the maximum variance in the roll angle is 0.1320°. After the ultrasonic ranging module is processed with the Kalman fusion algorithm, the maximum variance is only 0.0085.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, H.; Ma, W.; Liu, T.; Li, W. Assessing farmland suitability for agricultural machinery in land consolidation schemes in hilly terrain in China: A machine learning approach. Front. Plant Sci. 2023, 14, 1084886. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Zhu, J.; Liu, F.; He, Z.; Lai, Q.; Zhu, Z.; Song, Z.; Li, Z. Algorithm and scale experiment of gyro-based tractor rollover control towards hilly farmland application. Comput. Electron. Agric. 2024, 220, 108925. [Google Scholar] [CrossRef]
- Niu, P.; Chen, J.; Zhao, J.; Luo, Z. Analysis and evaluation of vibration characteristics of a new type of electric mini-tiller based on vibration test. Int. J. Agr. Biol. Eng. 2019, 12, 106–110. [Google Scholar] [CrossRef]
- Qin, C.; Wright, A.L.; Ma, L.; He, X.; Xie, D.; Jiang, X. Improving nitrogen-use efficiency by using ridge tillage in rice paddy soils. Soil. Use Manag. 2022, 38, 528–536. [Google Scholar] [CrossRef]
- Ren, B.; Dong, S.; Liu, P.; Zhao, B.; Zhang, J. Ridge tillage improves plant growth and grain yield of waterlogged summer maize. Agr. Water Manag. 2016, 177, 392–399. [Google Scholar] [CrossRef]
- Hu, Y.; Ma, P.; Wu, S.; Sun, B.; Feng, H.; Pan, X.; Zhang, B.; Chen, G.; Duan, C.; Lei, Q.; et al. Spatial-temporal distribution of winter wheat (Triticum aestivum L.) roots and water use efficiency under ridge—Furrow dual mulching. Agr. Water Manag. 2020, 240, 106301. [Google Scholar] [CrossRef]
- Henriksen, C.B.; Rasmussen, J.; Molgaard, J.P. Potato tuber yield and quality and soil inorganic nitrogen as affected by timing of ridging with and without catch crops. Soil. Till Res. 2007, 94, 36–46. [Google Scholar] [CrossRef]
- Chao, L.; Xicen, T.; Yanan, Y.; Zhiyang, F. Design and Analysis of a Novel Deformable Wheel-legged Robot. Trans. Chin. Soc. Agric. Mach. 2022, 58, 65–74. [Google Scholar]
- Li, Z.L.; Liu, J.H.; Sun, Z.B.; Yu, C.Z. Dynamic research and analysis for a wheel-legged harvester chassis during tilting process. Adv. Mech. Eng. 2019, 11, 1687814019855453. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, D.; Li, Z.; Shi, Y.; Wang, N. Optimum Design and Trafficability Analysis for an Articulated Wheel-Legged Forestry Chassis. J. Mech. Design 2022, 144, 013301. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, L.; Jing, B.; Chai, X.; Li, Y. Development of a four-point adjustable lifting crawler chassis and experiments in a combine harvester. Comput. Electron. Agric. 2020, 173, 105416. [Google Scholar] [CrossRef]
- Wang, Z.; Xia, Y. Model establishment of body attitude adjustment system based on Backstepping control algorithm and automatic leveling technology. Clust. Comput. 2019, 22, 14327–14337. [Google Scholar] [CrossRef]
- Xiaoyan, W.; Bo, D.; Dingyang, T.; Yunpeng, J.; Hongwen, L.; Qingjie, W. Design and Experiment of Undriven Soil Puddling Machine with lmproved Auto-leveling and Straw-burying Design for Paddy Field. Trans. Chin. Soc. Agric. Mach. 2022, 53, 20–31. [Google Scholar]
- Qing, Z.; Kaoxin, P.; Zhenyu, W.; Shaojiong, H.; Yong, Y.; Decheng, W. Pose Control of Biomimetic Wheel-legged Robots in Complex Terrain. Trans. Chin. Soc. Agric. Mach. 2024, 55, 380–391. [Google Scholar]
- Jiang, Y.; Sun, Z.; Wang, R.; Ding, R.; Ye, Q. Design and control of a new omnidirectional levelling system for hilly crawler work machines. Comput. Electron. Agr. 2024, 218, 108661. [Google Scholar] [CrossRef]
- Zeyu, S.; Changgao, X.; Yu, J.; Yifan, G.; Ruochen, W. Omnidirectional Leveling Control of Crawler Machine Based on QBP-PlD. Trans. Chin. Soc. Agric. Mach. 2023, 54, 397–406. [Google Scholar]
- Wang, Z.; Yang, J.; Liu, P.; Long, X.; Li, H.; Wei, W. Development of an agricultural vehicle levelling system based on rapid active levelling. Biosyst. Eng. 2019, 186, 337–348. [Google Scholar] [CrossRef]
- Mizushima, A.; Ishii, K.; Noguchi, N.; Matsuo, Y.; Lu, R. Development of a low-cost attitude sensor for agricultural vehicles. Comput. Electron. Agric. 2011, 76, 198–204. [Google Scholar] [CrossRef]
- Goetz, K.T.; Soitinaho, R.; Oksanen, T. Ploughing furrow recognition for onland ploughing using a 3D-LiDAR sensor. Comput. Electron. Agric. 2023, 210, 107941. [Google Scholar] [CrossRef]
- Luo, S.; Liu, W.; Zhang, Y.; Wang, C.; Xi, X.; Nie, S.; Ma, D.; Lin, Y.; Zhou, G. Maize and soybean heights estimation from unmanned aerial vehicle (UAV) LiDAR data. Comput. Electron. Agric. 2021, 182, 106005. [Google Scholar] [CrossRef]
- Hu, W.; Jiang, P.; Xiao, F.; Jin, S.; Luo, Y.; Liu, Q.; Long, L.; Shi, Y. Identifying rice seedling bands based on slope virtualization clustering. Comput. Electron. Agric. 2020, 175, 105470. [Google Scholar] [CrossRef]
- Manpreet-Singh; Sidhu, H.S.; Yadvinder-Singh; Singh, S.K.; Pandey, H.S. Performance evaluation of automatic vis-a-vis manual topographic survey for precision land levelling. Precis. Agric. 2020, 21, 300–310. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Y.; Li, Y.; Chang, M.; Chen, Z.; Lan, Y.; Wu, C. Real-Time field road freespace extraction for agricultural machinery autonomous driving based on LiDAR. Comput. Electron. Agric. 2023, 211, 108028. [Google Scholar] [CrossRef]
- Fricke, T.; Wachendorf, M. Combining ultrasonic sward height and spectral signatures to assess the biomass of legume—Grass swards. Comput. Electron. Agric. 2013, 99, 236–247. [Google Scholar] [CrossRef]
- Zaman, Q.U.; Esau, T.J.; Schumann, A.W.; Percival, D.C.; Chang, Y.K.; Read, S.M.; Farooque, A.A. Development of prototype automated variable rate sprayer for real-time spot-application of agrochemicals in wild blueberry fields. Comput. Electron. Agric. 2011, 76, 175–182. [Google Scholar] [CrossRef]
- Ma, T.; Zhang, D.; Zhuang, J.; You, C.; Yin, G.; Tang, S. TDOA-based UWB indoor 1D localization via weighted sliding window filtering. Digit. Signal Process 2024, 151, 104544. [Google Scholar] [CrossRef]
- Xiaohu, J.; Jin, T.; Yunhai, M.; Jinguang, L.; Baoguang, W.; Jiyu, S. Study of Tillage Depth Detecting Device Based on Kalman Filter and Fusion Algorithm. Trans. Chin. Soc. Agric. Mach. 2020, 51, 53–60. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Format | Entity | Description | Format | Entity | Description |
|---|---|---|---|---|---|
| Power battery | V | 60 | Velocity of operation | Km/h | 1–20 |
| Exterior Dimensions | m | 1.5 × 1 × 0.8 | Locomotive Propulsion System | Electric four-wheel drive | |
| Wheel track | m | 0.7–0.84 | Wheelbase | m | 1–1.2 |
| Ground clearance | m | 0.25–0.35 | Study hours | h | 8 |
| Parameters | N10 LiDAR Sensor |
|---|---|
| Principles of Distance Measurement | TOF |
| Angular Scanning Mechanism | 360° |
| Output Data Resolution | 15 mm |
| Measurement Precision | 3 cm |
| Measurement/Sampling Frequency | 4500 |
| Angular Resolution | 0.48–0.96° |
| Scanning Frequency | 6–12 HZ |
| Parameters | Ultrasonic Transducer |
|---|---|
| Maximum Detection Range | 450 cm |
| Scanning Angle | 15° |
| Output Data Resolution | 1 mm |
| Measurement Accuracy | 2% |
| Operating Frequency | 40 kHz |
| Output Interface Mode | GPIO/UART/IIC |
| Pitch Angle Not Leveled | Adjust Pitch to Level | Roll Angle Not Aligned | Calibrate Roll for Alignment | |
|---|---|---|---|---|
| a. Subtle bilateral adjustment for limb equilibrium | ||||
| Arithmetic Mean | 2.2303 | 0.5454 | 0.0145 | 0.0199 |
| Variance | 1.1181 | 0.0474 | 0.0070 | 0.0249 |
| Standard Deviation | 1.0574 | 0.2178 | 0.0834 | 0.1579 |
| b. Pronounced bilateral alignment of lower extremities | ||||
| Arithmetic Mean | 4.5543 | 0.6154 | −0.2310 | 0.0406 |
| Variance | 6.9937 | 0.0313 | 0.0146 | 0.0025 |
| Standard Deviation | 2.6446 | 0.1770 | 0.1207 | 0.0502 |
| c. Refined unilateral balancing with minimal angulation | ||||
| Arithmetic Mean | 1.9099 | 0.5799 | −2.5596 | −0.9989 |
| Variance | 0.7305 | 0.0145 | 1.4356 | 0.0886 |
| Standard Deviation | 0.8547 | 0.1203 | 1.1981 | 0.2976 |
| d. Extensive unilateral recalibration with significant angular modification | ||||
| Arithmetic Mean | 2.1967 | 0.3443 | −2.6676 | −0.1544 |
| Variance | 1.1882 | 0.0122 | 1.9281 | 0.1320 |
| Standard Deviation | 1.0901 | 0.1103 | 1.3886 | 0.3633 |
| Ultrasonic Sensor 1 Pre-Filtration | Ultrasonic Sensor 1 Post-Filtration | Ultrasonic Sensor 2 Post-Filtration | Ultrasonic Sensor 2 Pre-Filtration | Amalgamated Ultrasonic Data | |
|---|---|---|---|---|---|
| The Kalman filter fusion value at the platform’s zenith | |||||
| Arithmetic Mean | 359.9918 | 359.9961 | 359.3415 | 359.3468 | 359.5312 |
| Variance | 1.4198 | 0.0304 | 1.5983 | 0.0120 | 0.0090 |
| Standard Deviation | 1.1915 | 0.1743 | 1.2643 | 0.1097 | 0.0950 |
| The Kalman filter fusion value at the platform’s nadir | |||||
| Arithmetic Mean | 253.1437 | 253.1458 | 252.3711 | 252.3782 | 252.8085 |
| Variance | 1.3833 | 0.0151 | 1.5335 | 0.0193 | 0.0085 |
| Standard Deviation | 1.1762 | 0.1229 | 1.2383 | 0.1389 | 0.0921 |
| RW | AL | AR | HL | HR | JW | JH | SW | SH | |
|---|---|---|---|---|---|---|---|---|---|
| data1 | 50.2 cm | 120.3 | 119.3 | 17.3 cm | 18.0 cm | 50.4 cm | 17.8 cm | 71.3 cm | 25.3 cm |
| data2 | 49.6 cm | 135.1 | 135.8 | 9.8 cm | 9.5 cm | 50.2 cm | 9.7 cm | 71.5 cm | 25.3 cm |
| data3 | 50.7 cm | 150.2 | 149.8 | 5.9 cm | 6.0 cm | 50.5 cm | 5.9 cm | 69.4 cm | 25.3 cm |
| RW | AL | AR | HL | HR | JW | JH | SW | SH | |
|---|---|---|---|---|---|---|---|---|---|
| data4 | 54.2 cm | 120.1 | 119.8 | 20.5 cm | 21.1 cm | 54.1 cm | 20.8 cm | 73.2 cm | 26.8 cm |
| data5 | 54.1 cm | 135.5 | 135.1 | 11.8 cm | 12.0 cm | 54.3 cm | 11.9 cm | 74.9 cm | 25.3 cm |
| data6 | 54.4 cm | 150.9 | 151.6 | 6.8 cm | 7.5 cm | 54.9 cm | 7.2 cm | 75.1 cm | 25.3 cm |
| RW | AL | AR | HL | HR | JW | JH | SW | SH | |
|---|---|---|---|---|---|---|---|---|---|
| data7 | 58.3 cm | 120.6 | 121.2 | 23.9 cm | 23.4 cm | 57.8 cm | 23.6 cm | 77.2 cm | 27.6 cm |
| data8 | 58.2 cm | 135.6 | 135.9 | 13.7 cm | 13.8 cm | 58.5 cm | 14.1 cm | 78.9 cm | 25.3 cm |
| data9 | 58.1 cm | 150.5 | 151.9 | 7.9 cm | 7.5 cm | 57.9 cm | 7.7 cm | 79.1 cm | 25.3 cm |
| RW | AL | AR | HL | HR | JW | JH | SW | SH | |
|---|---|---|---|---|---|---|---|---|---|
| data10 | 62.3 cm | 118.2 | 119.3 | 30.1 cm | 28.8 cm | 61.9 cm | 29.7 cm | 81.9 cm | 33.5 cm |
| data11 | 63.1 cm | 134.2 | 133.8 | 17.6 cm | 18.0 cm | 62.8 cm | 17.9 cm | 82.8 cm | 25.3 cm |
| data12 | 61.8 cm | 148.9 | 150.2 | 9.6 cm | 9.1 cm | 62.5 cm | 9.5 cm | 83.1 cm | 25.3 cm |
| RW | AL | AR | HL | HR | JW | JH | SW | SH | |
|---|---|---|---|---|---|---|---|---|---|
| data13 | 64.3 cm | 119.2 | 119.3 | 30.7 cm | 30.6 cm | 64.5 cm | 30.8 cm | 85.6 cm | 34.8 cm |
| data14 | 64.5 cm | 134.5 | 133.6 | 17.5 cm | 18.2 cm | 64.8 cm | 18.1 cm | 85.8 cm | 25.3 cm |
| data15 | 65.6 cm | 148.5 | 150.4 | 11.3 cm | 10.1 cm | 64.5 cm | 11.0 cm | 84.9 cm | 25.3 cm |
| DW | DH | DW | DH | DW | DH | |||
|---|---|---|---|---|---|---|---|---|
| data1 | −1.1 cm | × | data6 | −0.7 cm | × | data11 | 0.3 cm | × |
| data2 | −1.9 cm | × | data7 | 1.1 cm | 1.1 cm | data12 | −1.3 cm | × |
| data3 | 1.3 cm | × | data8 | −0.7 cm | × | data13 | −1.3 cm | 0.9 cm |
| data4 | 1.0 cm | −1.0 cm | data9 | −1.0 cm | × | data14 | −1.3 cm | × |
| data5 | −0.8 cm | × | data10 | 0.4 cm | 1.0 cm | data15 | 0.7 cm | × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Xiang, S.; Ye, K.; Luo, X.; Zhu, C.; Li, J.; Shi, Y. Design and Experiment of an Independent Leg-Type Chassis Vehicle Attitude Adjustment System. Agriculture 2024, 14, 1548. https://doi.org/10.3390/agriculture14091548
Li C, Xiang S, Ye K, Luo X, Zhu C, Li J, Shi Y. Design and Experiment of an Independent Leg-Type Chassis Vehicle Attitude Adjustment System. Agriculture. 2024; 14(9):1548. https://doi.org/10.3390/agriculture14091548
Chicago/Turabian StyleLi, Chao, Siliang Xiang, Kang Ye, Xiao Luo, Chenglin Zhu, Jiarong Li, and Yixin Shi. 2024. "Design and Experiment of an Independent Leg-Type Chassis Vehicle Attitude Adjustment System" Agriculture 14, no. 9: 1548. https://doi.org/10.3390/agriculture14091548
APA StyleLi, C., Xiang, S., Ye, K., Luo, X., Zhu, C., Li, J., & Shi, Y. (2024). Design and Experiment of an Independent Leg-Type Chassis Vehicle Attitude Adjustment System. Agriculture, 14(9), 1548. https://doi.org/10.3390/agriculture14091548