
Design and Experimental Testing of Extended-Range Power Supply System for 15 Horsepower Electric Tractor


Abstract
1. Introduction
2. Materials and Methods
2.1. Overall Design of the Extended-Range Power Supply System
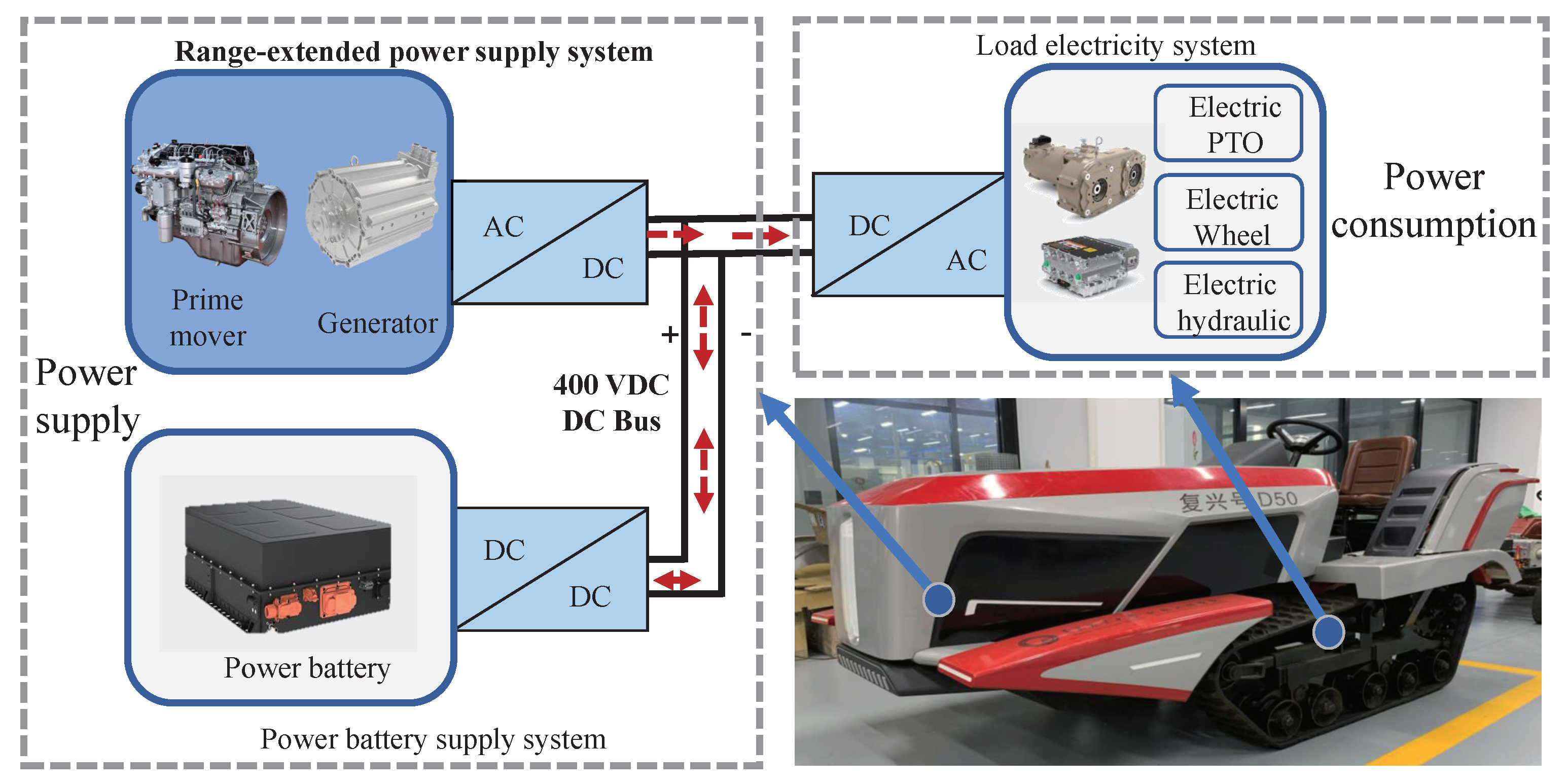
2.1.1. The Power Supply Architecture of the Extended-Range Electric Tractor
2.1.2. Hardware Design of the Extended-Range Power Supply System
- 1.
- Hardware architecture
- 2.
- Determination of the DC bus voltage level
- 3.
- Hardware selection
2.2. Control Design of the Extended-Range Power Supply System
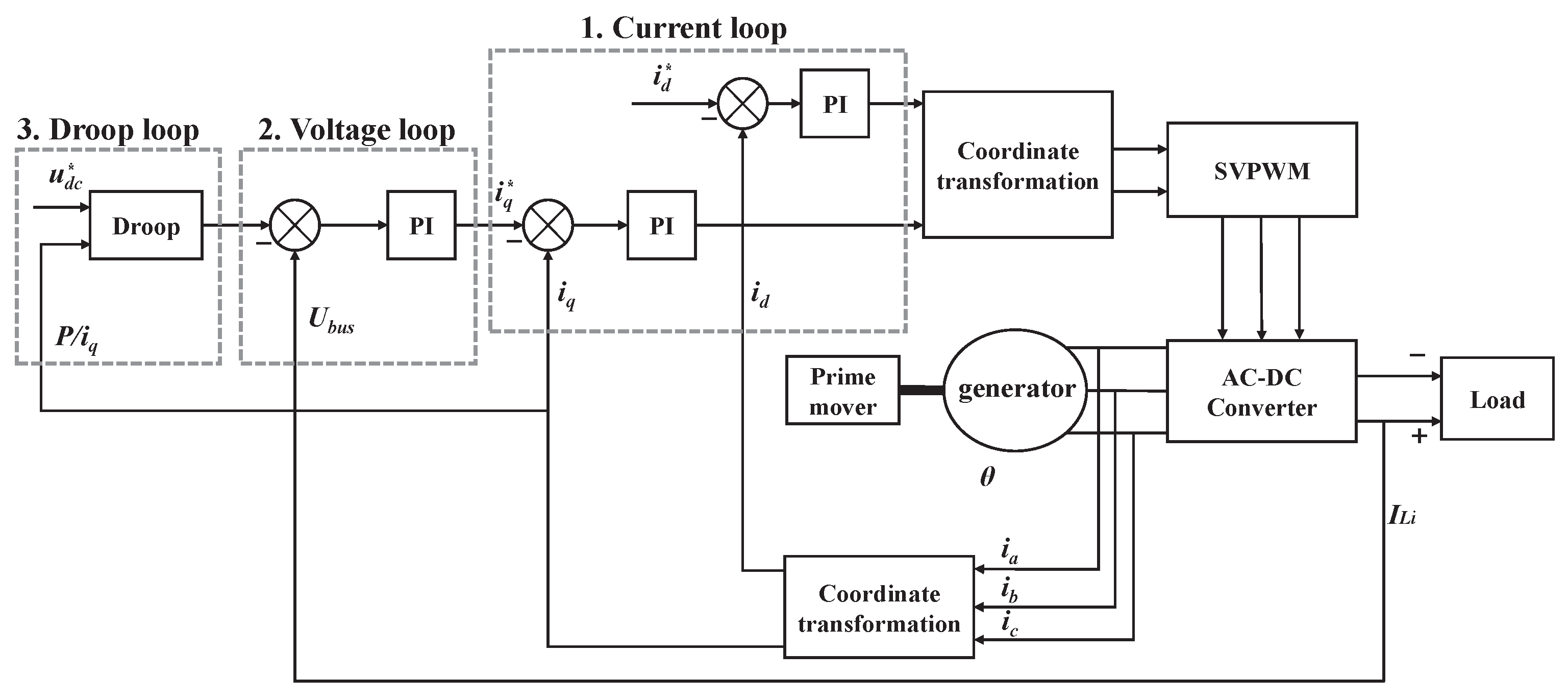
2.2.1. General Overview of the Control Strategy of the Extended-Range Power Supply System
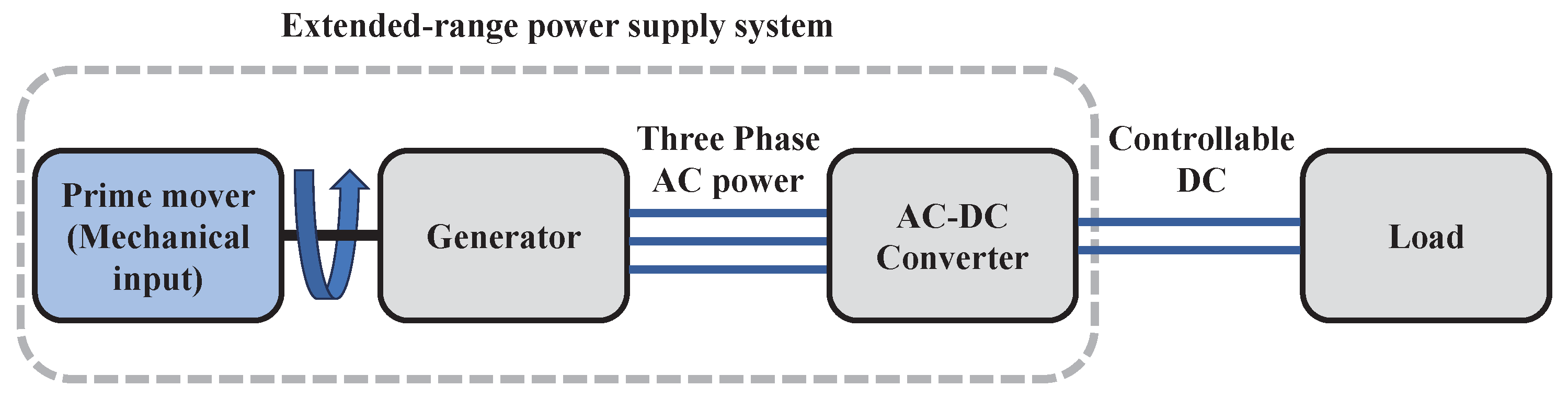
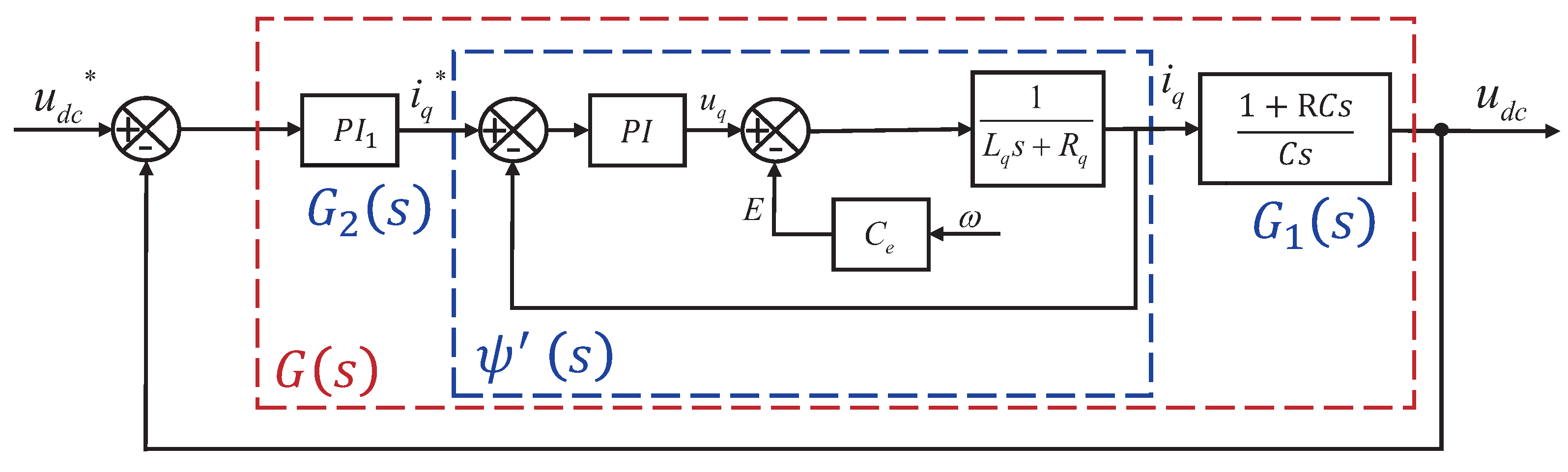
2.2.2. Mathematical Model of the Controlled Object of Extended-Range Power Supply System
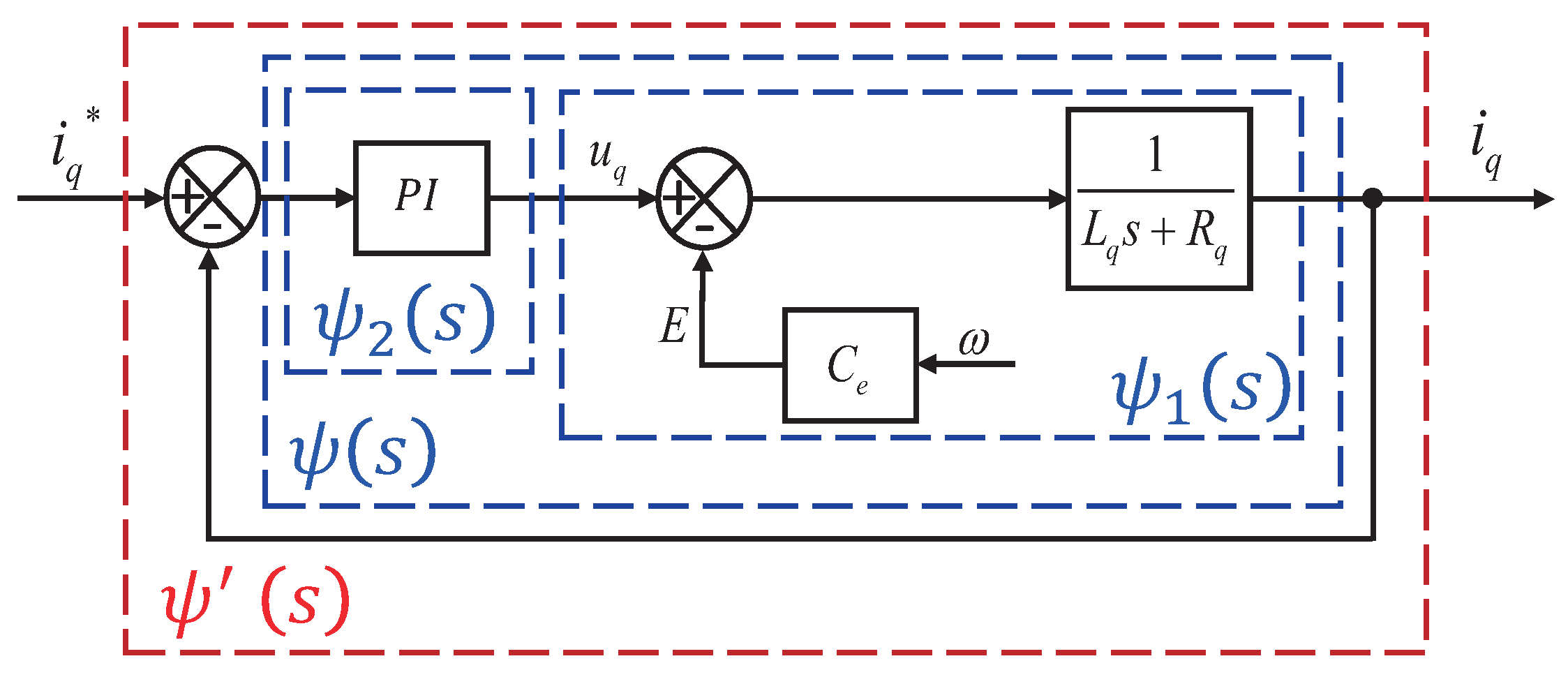
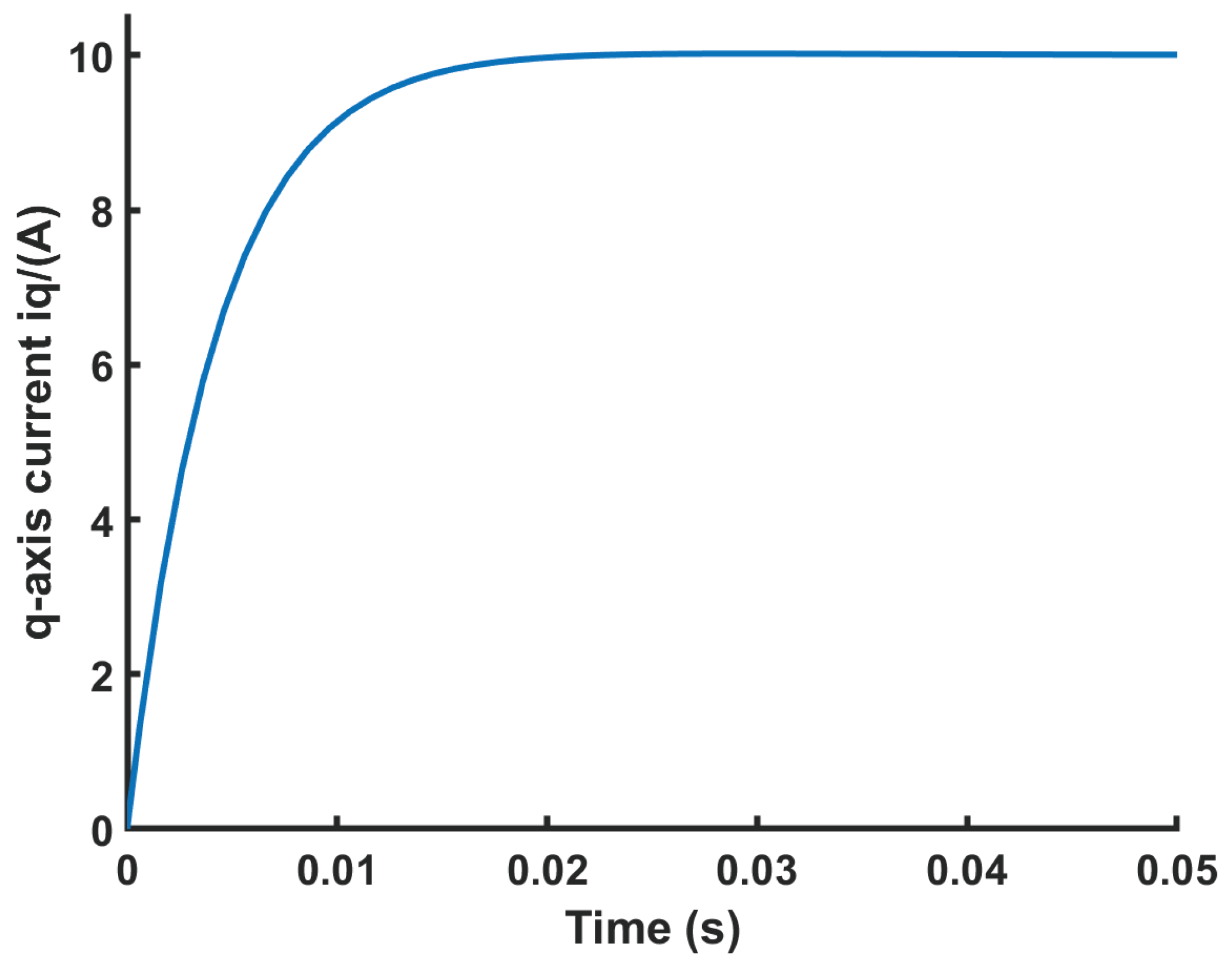
2.2.3. Design of Current Control for Extended-Range Power Supply System
2.2.4. Design of Voltage Control for Extended-Range Power Supply System
2.2.5. Design of Droop Control Parameters for Extended-Range Power Supply System
3. Results and Discussion
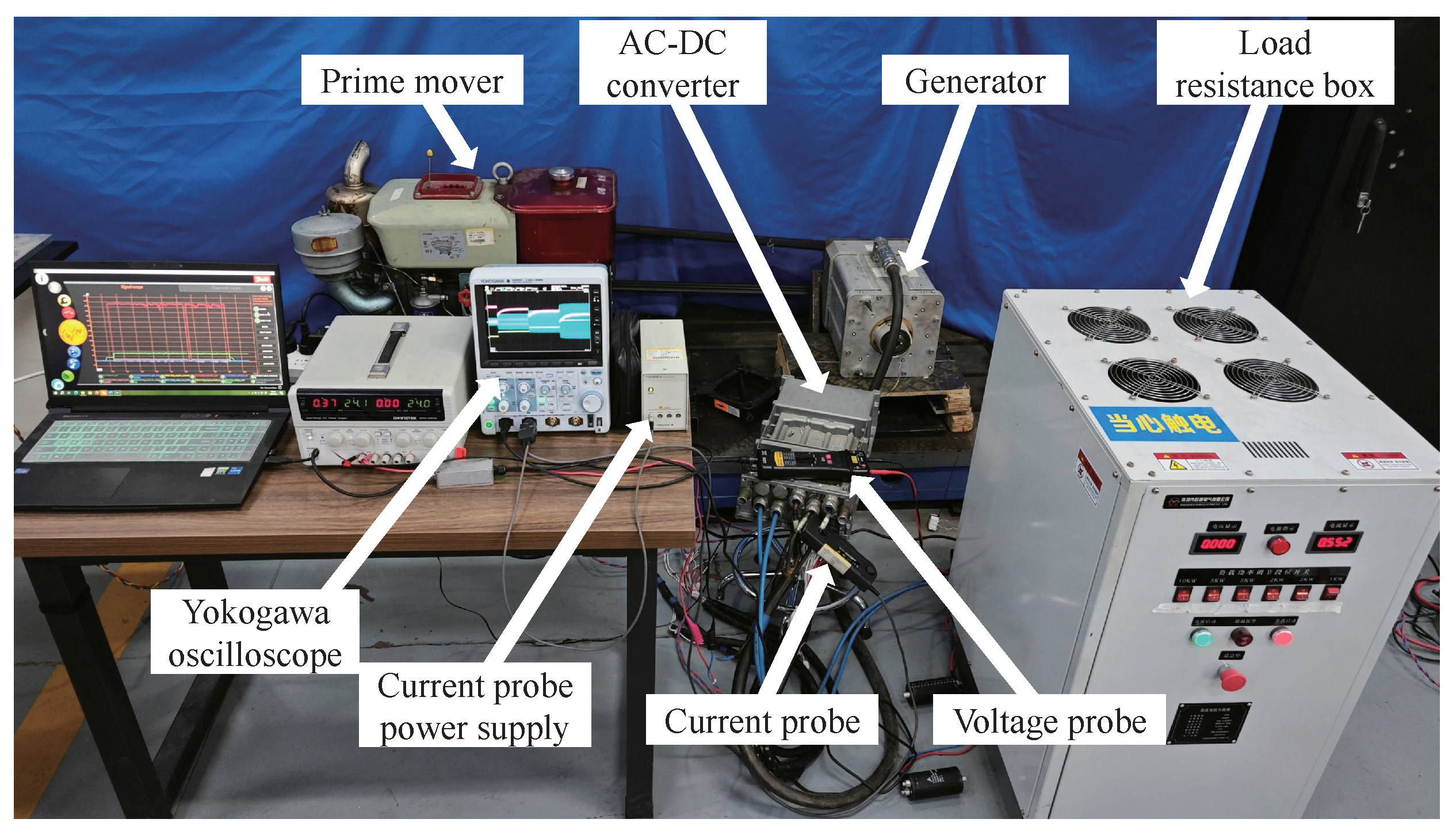
3.1. Experimental and Test Conditions
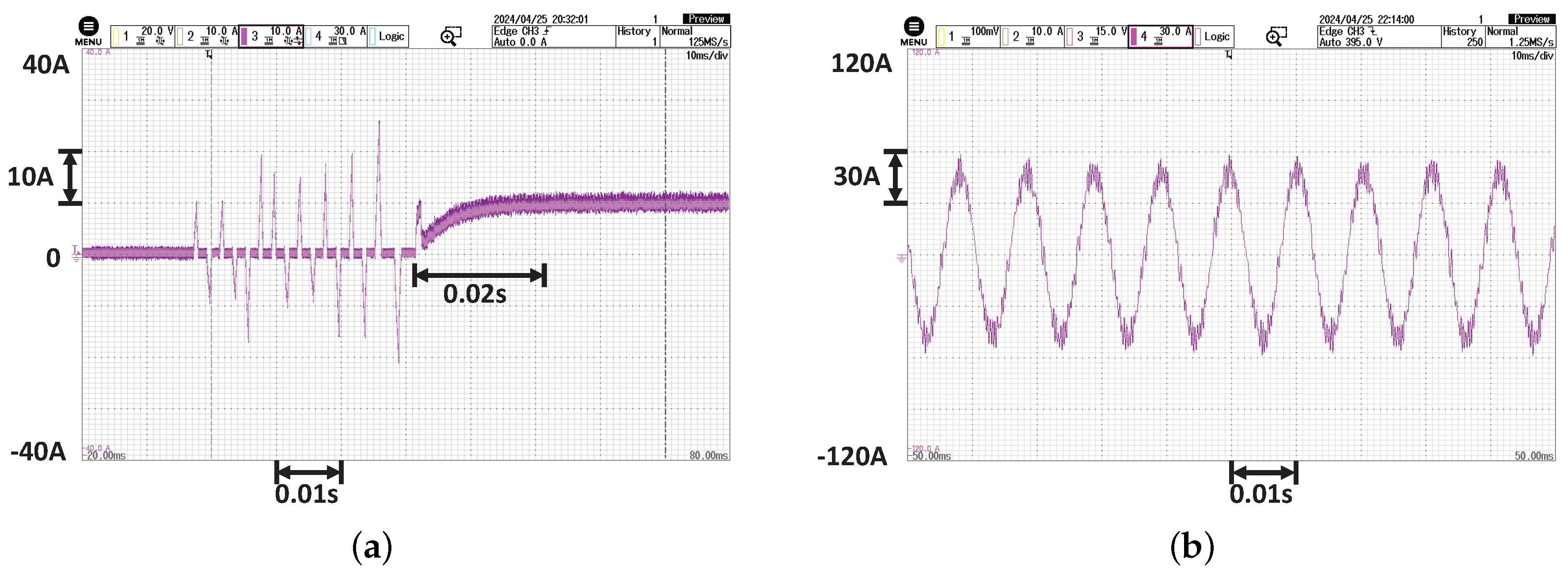
3.2. Current Loop Control Characteristics Experiment
3.3. Start-Up Ramping
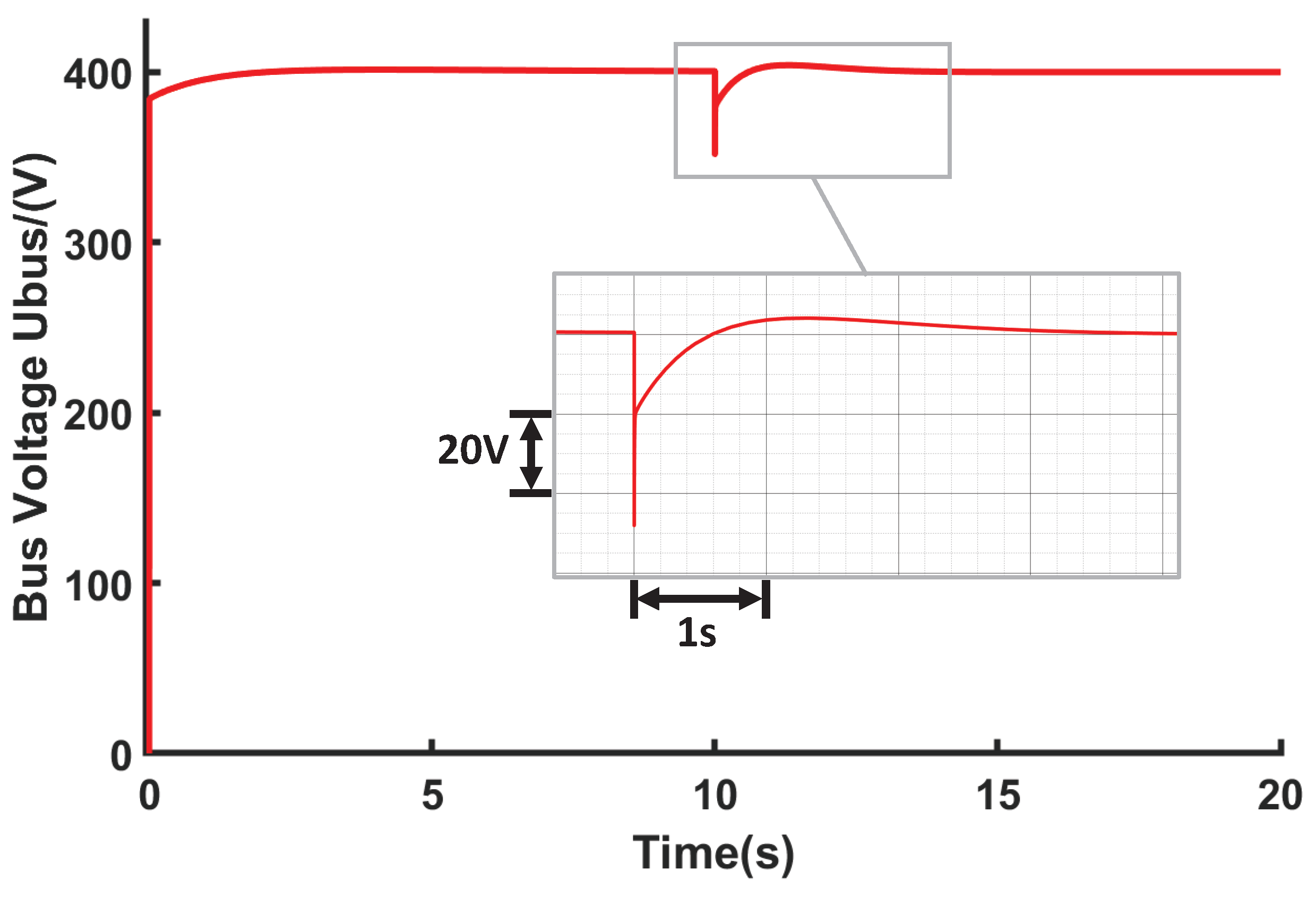
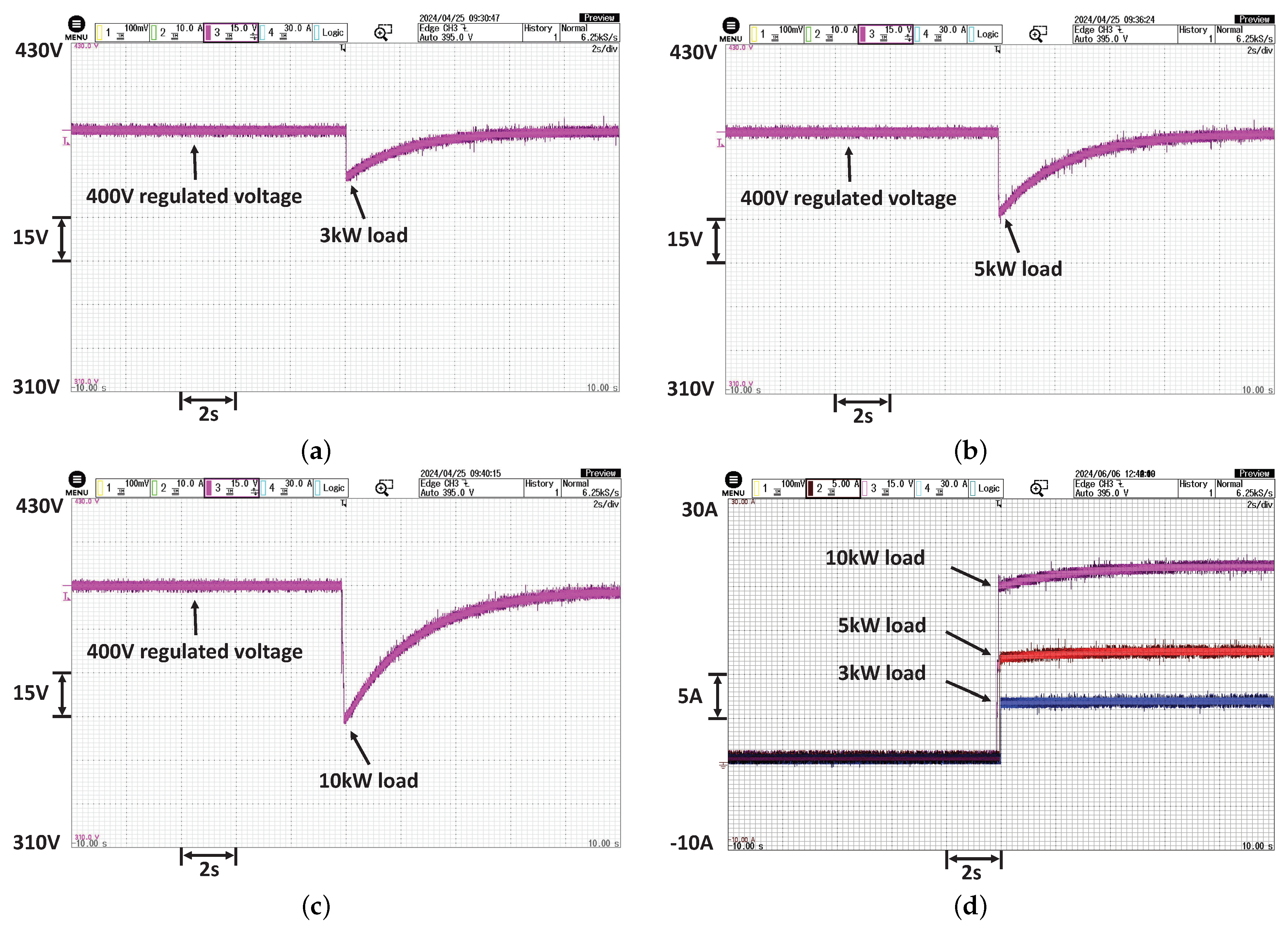
3.4. Voltage Loop Dynamic Control Characteristics Experiment
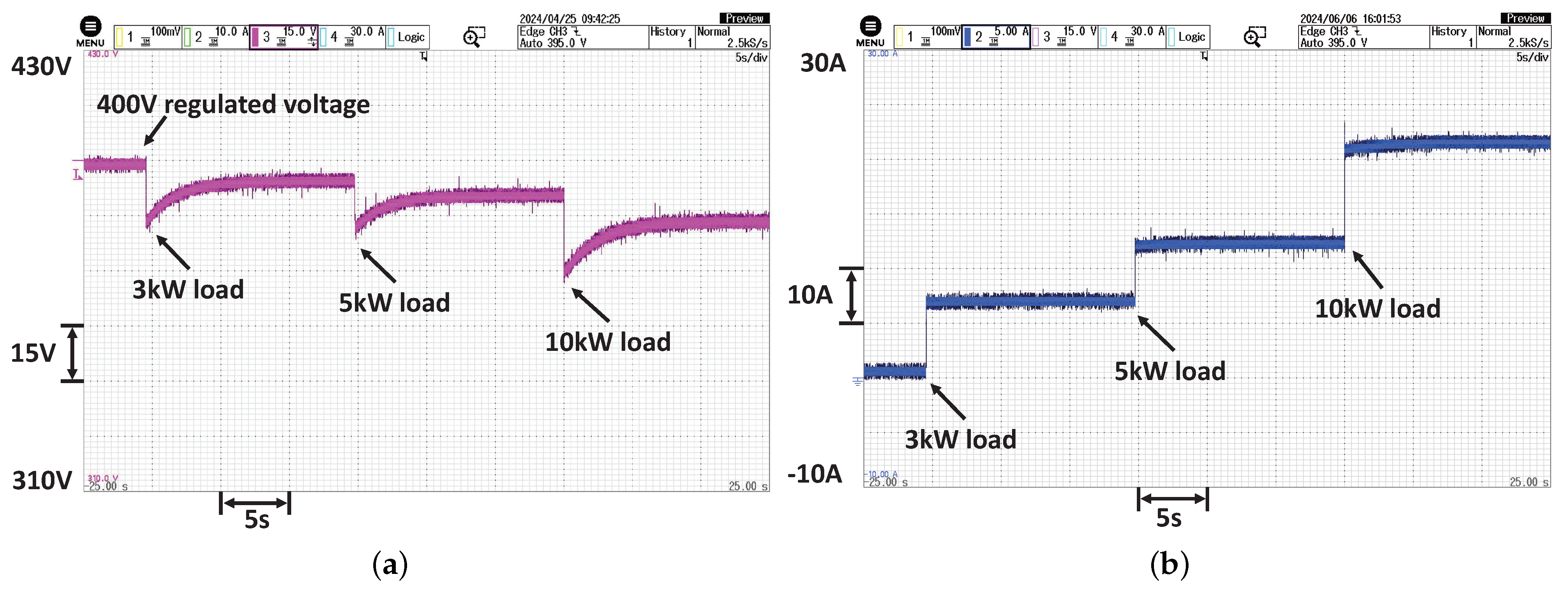
3.5. Droop Control Steady State Characteristics Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Correction Statement
Abbreviations
| AC | Alternative Current |
| DC | Direct Current |
| CCS | Combined Charging System |
| SOC | State of Charge |
| PTO | Power Take-Off |
| AC-DC | Alternative Current–Direct Current |
| EMF | Electromotive Force |
| FOC | Field Orientation Control |
| PMSM | Permanent Magnet Synchronous Motor |
| PI | Proportional Integral |
References
- Khatawkar, D.S.; James, P.S.; Dhalin, D. Modern trends in farm machinery-electric drives: A review. Int. J. Curr. Microbiol. Appl. Sci. 2019, 8, 83–98. [Google Scholar] [CrossRef]
- Mileusnić, Z.; Petrović, D.; Đević, M. Comparison of tillage systems according to fuel consumption. Energy 2010, 35, 221–228. [Google Scholar] [CrossRef]
- Janulevičius, A.; Juostas, A.; Pupinis, G. Tractor’s engine performance and emission characteristics in the process of ploughing. Energy Convers. Manag. 2013, 75, 498–508. [Google Scholar] [CrossRef]
- Katrašnik, T. Hybridization of powertrain and downsizing of IC engine–A way to reduce fuel consumption and pollutant emissions–Part 1. Energy Convers. Manag. 2007, 48, 1411–1423. [Google Scholar] [CrossRef]
- Moreda, G.; Muñoz-García, M.; Barreiro, P. High voltage electrification of tractor and agricultural machinery–A review. Energy Convers. Manag. 2016, 115, 117–131. [Google Scholar] [CrossRef]
- Moghadasi, S.; Long, Y.; Jiang, L.; Munshi, S.; McTaggart-Cowan, G.; Shahbakhti, M. Design and performance analysis of hybrid electric class 8 heavy-duty regional-haul trucks with a micro-pilot natural gas engine in real-world highway driving conditions. Energy Convers. Manag. 2024, 309, 118451. [Google Scholar] [CrossRef]
- Deng, X.; Sun, H.; Lu, Z.; Cheng, Z.; An, Y.; Chen, H. Research on dynamic analysis and experimental study of the distributed drive electric tractor. Agriculture 2022, 13, 40. [Google Scholar] [CrossRef]
- An, Y.; Wang, L.; Deng, X.; Chen, H.; Lu, Z.; Wang, T. Research on Differential Steering Dynamics Control of Four-Wheel Independent Drive Electric Tractor. Agriculture 2023, 13, 1758. [Google Scholar] [CrossRef]
- Mao, Y.; Wu, Y.; Yan, X.; Liu, M.; Xu, L. Simulation and experimental research of electric tractor drive system based on Modelica. PLoS ONE 2022, 17, e0276231. [Google Scholar] [CrossRef]
- Zhang, X.; Tan, S.C.; Li, G.; Li, J.; Feng, Z. Components sizing of hybrid energy systems via the optimization of power dispatch simulations. Energy 2013, 52, 165–172. [Google Scholar] [CrossRef]
- Wu, Z.; Wang, J.; Xing, Y.; Li, S.; Yi, J.; Zhao, C. Energy Management of Sowing Unit for Extended-Range Electric Tractor Based on Improved CD-CS Fuzzy Rules. Agriculture 2023, 13, 1303. [Google Scholar] [CrossRef]
- Faria, R.; Moura, P.; Delgado, J.; De Almeida, A.T. A sustainability assessment of electric vehicles as a personal mobility system. Energy Convers. Manag. 2012, 61, 19–30. [Google Scholar] [CrossRef]
- Mousazadeh, H.; Keyhani, A.; Javadi, A.; Mobli, H.; Abrinia, K.; Sharifi, A. Life-cycle assessment of a Solar Assist Plug-in Hybrid electric Tractor (SAPHT) in comparison with a conventional tractor. Energy Convers. Manag. 2011, 52, 1700–1710. [Google Scholar]
- Li, J.; Wu, X.; Zhang, X.; Song, Z.; Li, W. Design of distributed hybrid electric tractor based on axiomatic design and Extenics. Adv. Eng. Inform. 2022, 54, 101765. [Google Scholar] [CrossRef]
- Liu, M.; Lei, S.; Zhao, J.; Meng, Z.; Zhao, C.; Xu, L. Review of development process and research status of electric tractors. Trans. Chin. Soc. Agric. Mach 2022, 53, 348–364. [Google Scholar]
- Flórez-Orrego, D.; Silva, J.A.; de Oliveira Jr, S. Exergy and environmental comparison of the end use of vehicle fuels: The Brazilian case. Energy Convers. Manag. 2015, 100, 220–231. [Google Scholar] [CrossRef]
- Pali, H.S.; Kumar, N.; Alhassan, Y. Performance and emission characteristics of an agricultural diesel engine fueled with blends of Sal methyl esters and diesel. Energy Convers. Manag. 2015, 90, 146–153. [Google Scholar] [CrossRef]
- Liu, M.; Li, Y.; Xu, L.; Wang, Y.; Zhao, J. General modeling and energy management optimization for the fuel cell electric tractor with mechanical shunt type. Comput. Electron. Agric. 2023, 213, 108178. [Google Scholar] [CrossRef]
- Li, X.; Xu, L.; Liu, M.; Yan, X.; Zhang, M. Research on torque cooperative control of distributed drive system for fuel cell electric tractor. Comput. Electron. Agric. 2024, 219, 108811. [Google Scholar] [CrossRef]
- Yang, H.; Sun, Y.; Xia, C.; Zhang, H. Research on energy management strategy of fuel cell electric tractor based on multi-algorithm fusion and optimization. Energies 2022, 15, 6389. [Google Scholar] [CrossRef]
- Chen, L.; Zhan, Q.; Wang, W.; Huang, X.; Zheng, Q. Design and experiment of electric drive system for pure electric tractor. Trans. Chin. Soc. Agric. Mach. 2018, 49, 388–394. [Google Scholar]
- Wang, B.; Sechilariu, M.; Locment, F. Intelligent DC microgrid with smart grid communications: Control strategy consideration and design. IEEE Trans. Smart Grid 2012, 3, 2148–2156. [Google Scholar] [CrossRef]
- Wang, B.; Qiao, M.; Chu, X.; Shang, S.; Wang, D. Design and Experimental Study of Extended-Range Electric Caterpillar Tractor. Trans. Chin. Soc. Agric. Mach 2023, 54, 431–439. [Google Scholar]
- Dong, Z.; Qin, J.; Hao, T.; Li, X.; Chi, K.T.; Lu, P. Distributed cooperative control of DC microgrid cluster with multiple voltage levels. Int. J. Electr. Power Energy Syst. 2024, 159, 109996. [Google Scholar] [CrossRef]
- Xiong, W.; Zhang, Y.; Yin, C. Optimal energy management for a series–parallel hybrid electric bus. Energy Convers. Manag. 2009, 50, 1730–1738. [Google Scholar] [CrossRef]
- Marzougui, H.; Kadri, A.; Martin, J.P.; Amari, M.; Pierfederici, S.; Bacha, F. Implementation of energy management strategy of hybrid power source for electrical vehicle. Energy Convers. Manag. 2019, 195, 830–843. [Google Scholar] [CrossRef]
- Liu, J.; Xia, C.; Jiang, D.; Sun, Y. Development and testing of the power transmission system of a crawler electric tractor for greenhouses. Appl. Eng. Agric. 2020, 36, 797–805. [Google Scholar] [CrossRef]
- Li, M.; Xu, H.; Li, W.; Liu, Y.; Li, F.; Hu, Y.; Liu, L. The structure and control method of hybrid power source for electric vehicle. Energy 2016, 112, 1273–1285. [Google Scholar] [CrossRef]
- Yu, Y.; Hao, S.; Guo, S.; Tang, Z.; Chen, S. Motor Torque Distribution Strategy for Different Tillage Modes of Agricultural Electric Tractors. Agriculture 2022, 12, 1373. [Google Scholar] [CrossRef]
- Alegria, E.; Brown, T.; Minear, E.; Lasseter, R.H. CERTS microgrid demonstration with large-scale energy storage and renewable generation. IEEE Trans. Smart Grid 2013, 5, 937–943. [Google Scholar] [CrossRef]
- Justo, J.J.; Mwasilu, F.; Lee, J.; Jung, J.W. AC-microgrids versus DC-microgrids with distributed energy resources: A review. Renew. Sustain. Energy Rev. 2013, 24, 387–405. [Google Scholar] [CrossRef]
- Hou, X.; Zhang, X.; Huang, S.; Xu, P.; Shen, J. Measurement of engine performance and maps-based emission prediction of agricultural tractors under actual operating conditions. Measurement 2023, 222, 113637. [Google Scholar] [CrossRef]
- Ren, G.; Wang, J.; Chen, C.; Wang, H. A variable-voltage ultra-capacitor/battery hybrid power source for extended range electric vehicle. Energy 2021, 231, 120837. [Google Scholar] [CrossRef]
- Cao, X.; Han, M.; Nee, H.P.; Yan, W. A new method for simplifying complex DC systems and obtaining the controller droop coefficients. IEEE Trans. Power Syst. 2021, 37, 996–1006. [Google Scholar] [CrossRef]
- Ahmed, K.; Hussain, I.; Seyedmahmoudian, M.; Stojcevski, A.; Mekhilef, S. Voltage stability and power sharing control of distributed generation units in DC microgrids. Energies 2023, 16, 7038. [Google Scholar] [CrossRef]
- Lee, H.S.; Kim, J.S.; Park, Y.I.; Cha, S.W. Rule-based power distribution in the power train of a parallel hybrid tractor for fuel savings. Int. J. Precis. Eng. Manuf.-Green Technol. 2016, 3, 231–237. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology Type | Advantages | Limitations |
|---|---|---|
| Pure battery | Zero emissions | Short endurance, Poor overload capacity |
| Batteries and supercapacitor | Zero emissions, Poor overload capacity | Short endurance |
| Hydrogen fuel cells | Low pollution | Poor infrastructure |
| Cable power supply | Long endurance | Limited scope of work, High infrastructure costs |
| Extended-range power supply | Long range, High fuel efficiency | Difficult control algorithms |
| Name | Parameters (Units) | Value |
|---|---|---|
| Generator | Rated power (kW) | 10 |
| Rated current (A) | 53.39 | |
| Rated speed (r/min) | 3000 | |
| Frequency (Hz) | 100 | |
| Pole pair | 2 | |
| Armature resistance () | 0.07 | |
| Armature inductance (mH) | 0.84 | |
| Prime mover | Rated power (kW) | 10.67 |
| Rated speed (r/min) | 2200 | |
| AC-DC Converter | Rated voltage on the DC side (V) | 400 |
| Rated current on the DC side (A) | 25 | |
| Switching frequency (kHz) | 8 | |
| Control functions | Current closed-loop control | |
| Voltage closed-loop control | ||
| droop control |
| Variable Name | Variable Definition | Variable Unit |
|---|---|---|
| A-phase stator current | A | |
| B-phase stator current | A | |
| C-phase stator current | A | |
| D-axis current | A | |
| Q-axis current | A | |
| D-axis reference current | A | |
| Q-axis reference current | A | |
| Electrical angle of the generator | Degree (°) | |
| DC bus current | A | |
| DC bus reference voltage | V | |
| P | Output power | W |
| DC bus actual voltage | V | |
| D-axis voltage | V | |
| D-axis inductance | H | |
| Q-axis voltage | V | |
| Q-axis inductance | H | |
| Magnetic flux | Wb | |
| Rotor angular speed | rad/s | |
| stator resistance | ||
| Back electromotive force coefficient | - | |
| Armature resistance |
| Load Level Name | Resistance Value () | Corresponding Power (kW) |
|---|---|---|
| Load 1 | 160 | 1 |
| Load 2 | 80 | 2 |
| Load 3 | 32 | 5 |
| Load 4 | 16 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Lv, Y.; Chu, X.; Wang, D.; Shang, S. Design and Experimental Testing of Extended-Range Power Supply System for 15 Horsepower Electric Tractor. Agriculture 2024, 14, 1551. https://doi.org/10.3390/agriculture14091551
Wang B, Lv Y, Chu X, Wang D, Shang S. Design and Experimental Testing of Extended-Range Power Supply System for 15 Horsepower Electric Tractor. Agriculture. 2024; 14(9):1551. https://doi.org/10.3390/agriculture14091551
Chicago/Turabian StyleWang, Baochao, Yanshi Lv, Xianggang Chu, Dongwei Wang, and Shuqi Shang. 2024. "Design and Experimental Testing of Extended-Range Power Supply System for 15 Horsepower Electric Tractor" Agriculture 14, no. 9: 1551. https://doi.org/10.3390/agriculture14091551
APA StyleWang, B., Lv, Y., Chu, X., Wang, D., & Shang, S. (2024). Design and Experimental Testing of Extended-Range Power Supply System for 15 Horsepower Electric Tractor. Agriculture, 14(9), 1551. https://doi.org/10.3390/agriculture14091551