
Experimental Investigation of Dual-Path Inline Mixing System for Sprayers in Corn-Soybean Strip Intercropping Mode


Abstract
1. Introduction
2. Materials and Methods
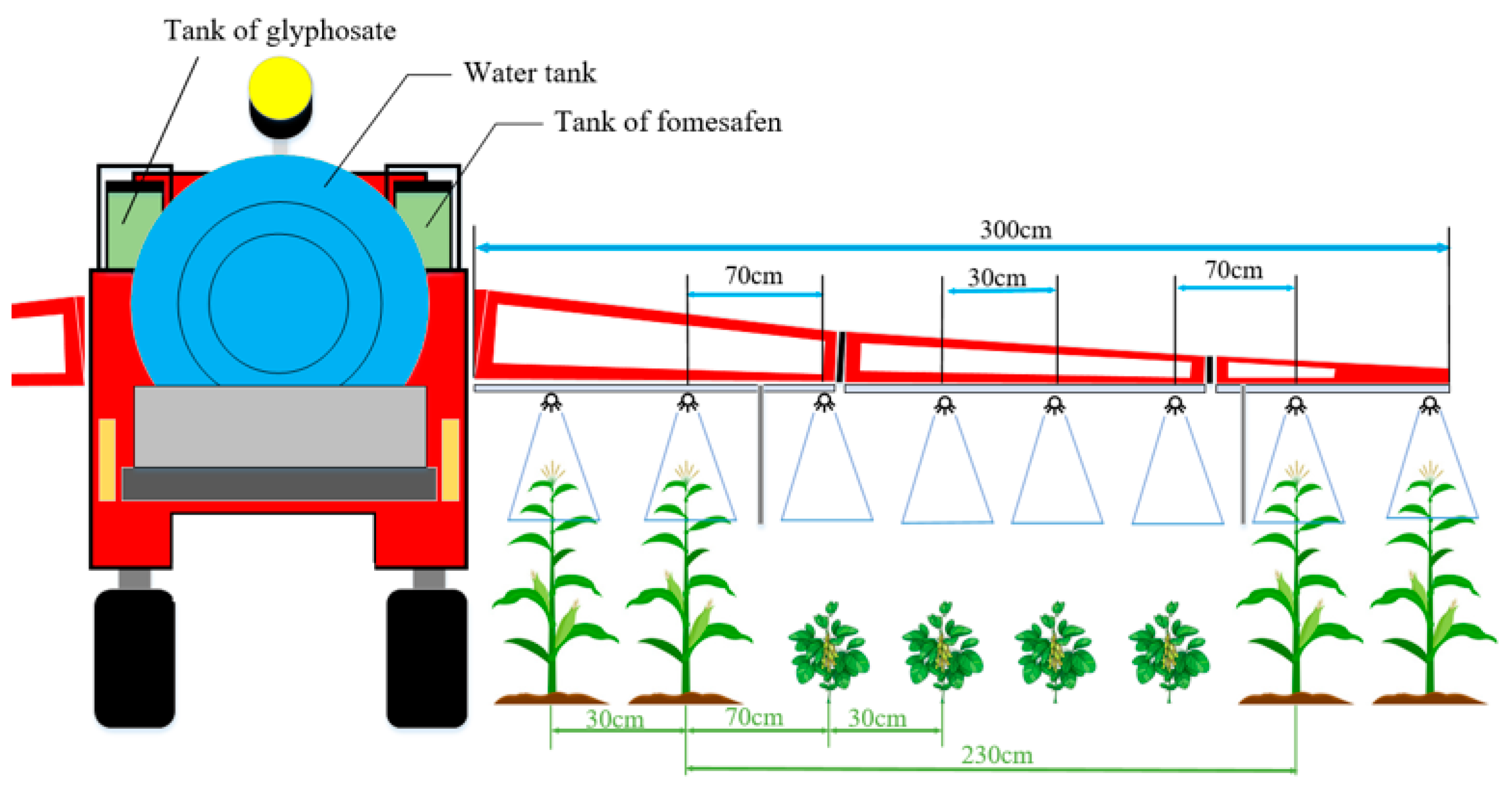
2.1. Agronomic Conditions of the Corn-Soybean Strip Intercropping Mode
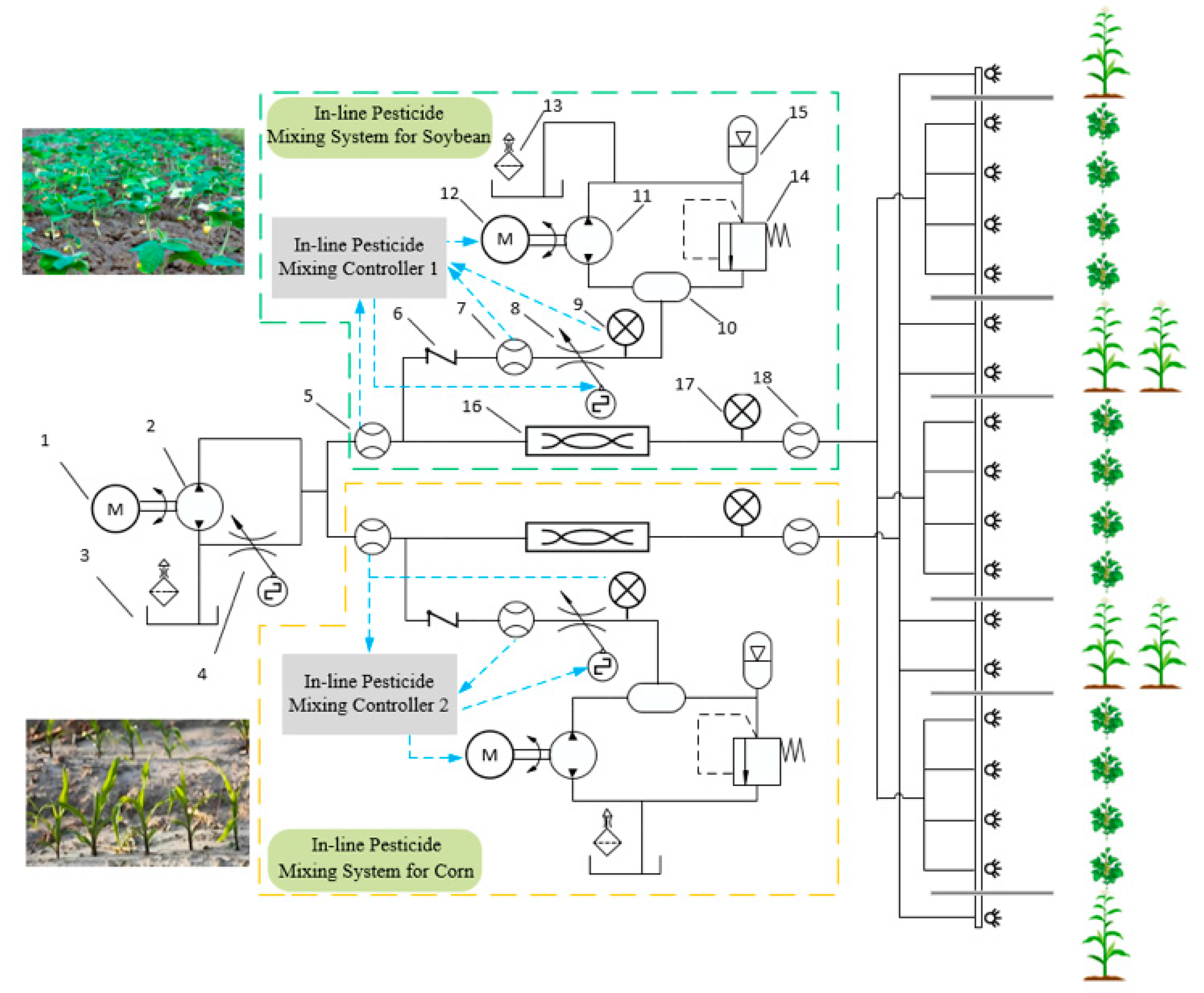
2.2. Working Principle of Direct Injection Dual-Path Inline Mixing System
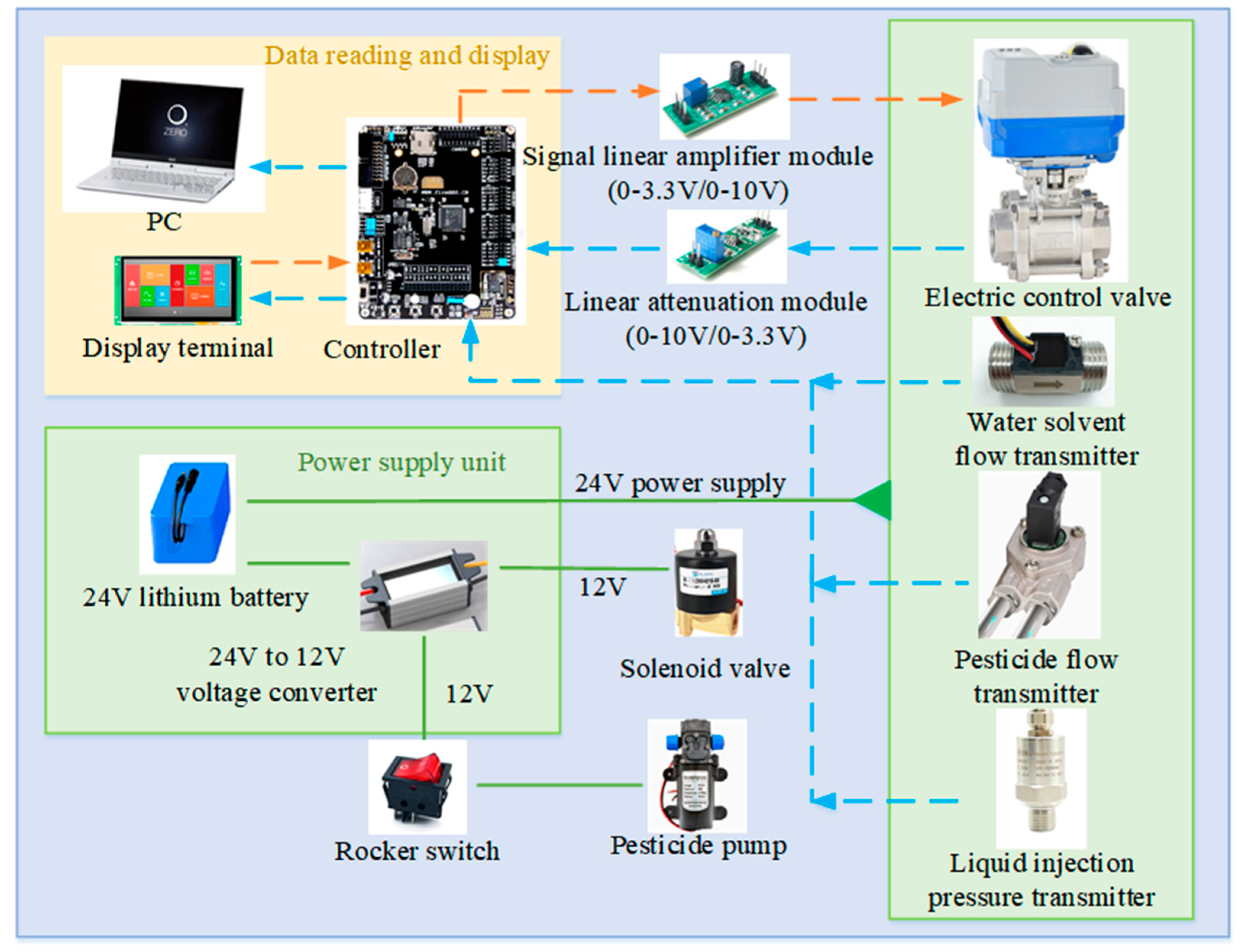
2.3. Working Principle of Direct Injection Dual-Path Inline Mixing Control System
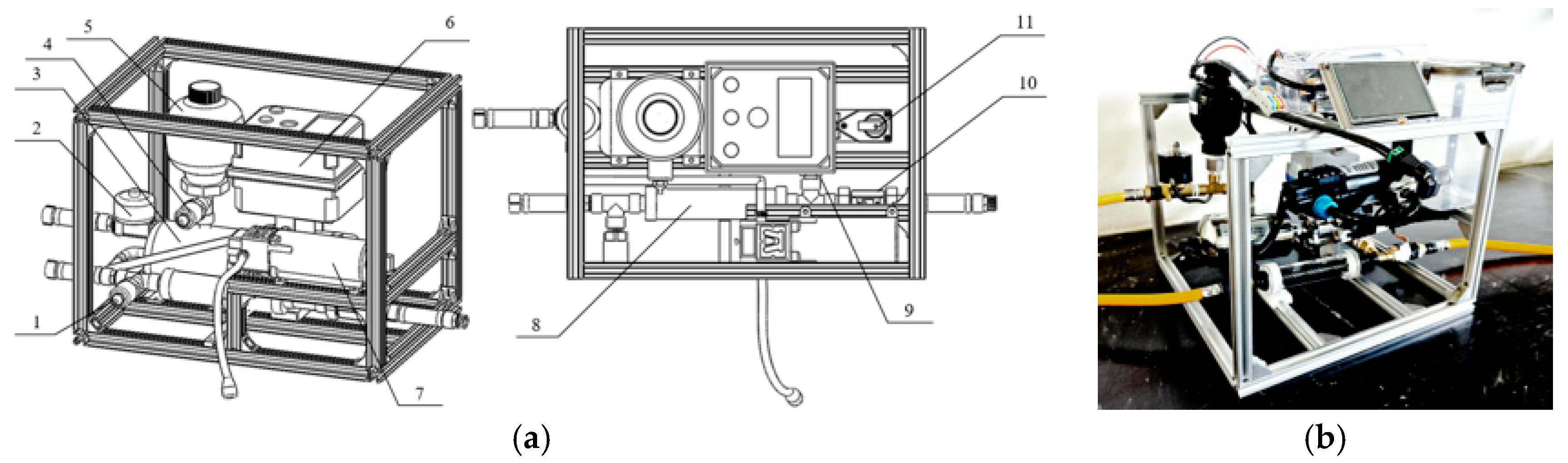
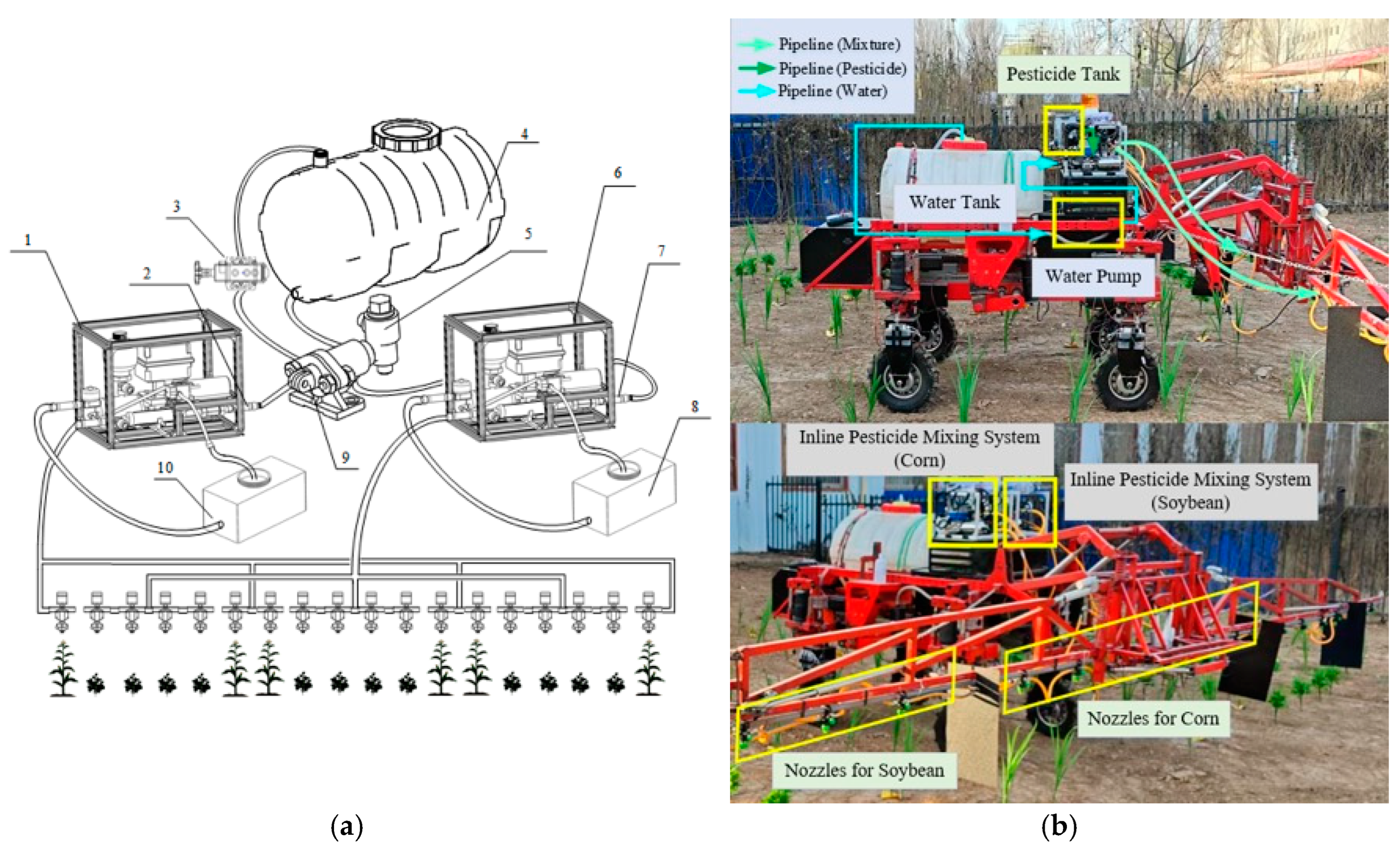
2.4. Direct Injection Two-Path Inline Mixing System Integration and Real Sprayer Installation
3. Results
3.1. Mixing Uniformity Test of the Dual-Path Inline Mixing System
- (1)
- Set the electric regulating valve to an opening degree of 33% and maintain this setting; operate the water pump at its standard gear, ensuring that all other operational components function normally.
- (2)
- After allowing the dual-path inline mixing system to reach a stable operating state, collect the spray liquid from nozzles installed on the sprayer’s spray rod.
- (3)
- Measure the electrical conductivity of the collected spray liquid from each nozzle after settling and calculate the mixing ratio.
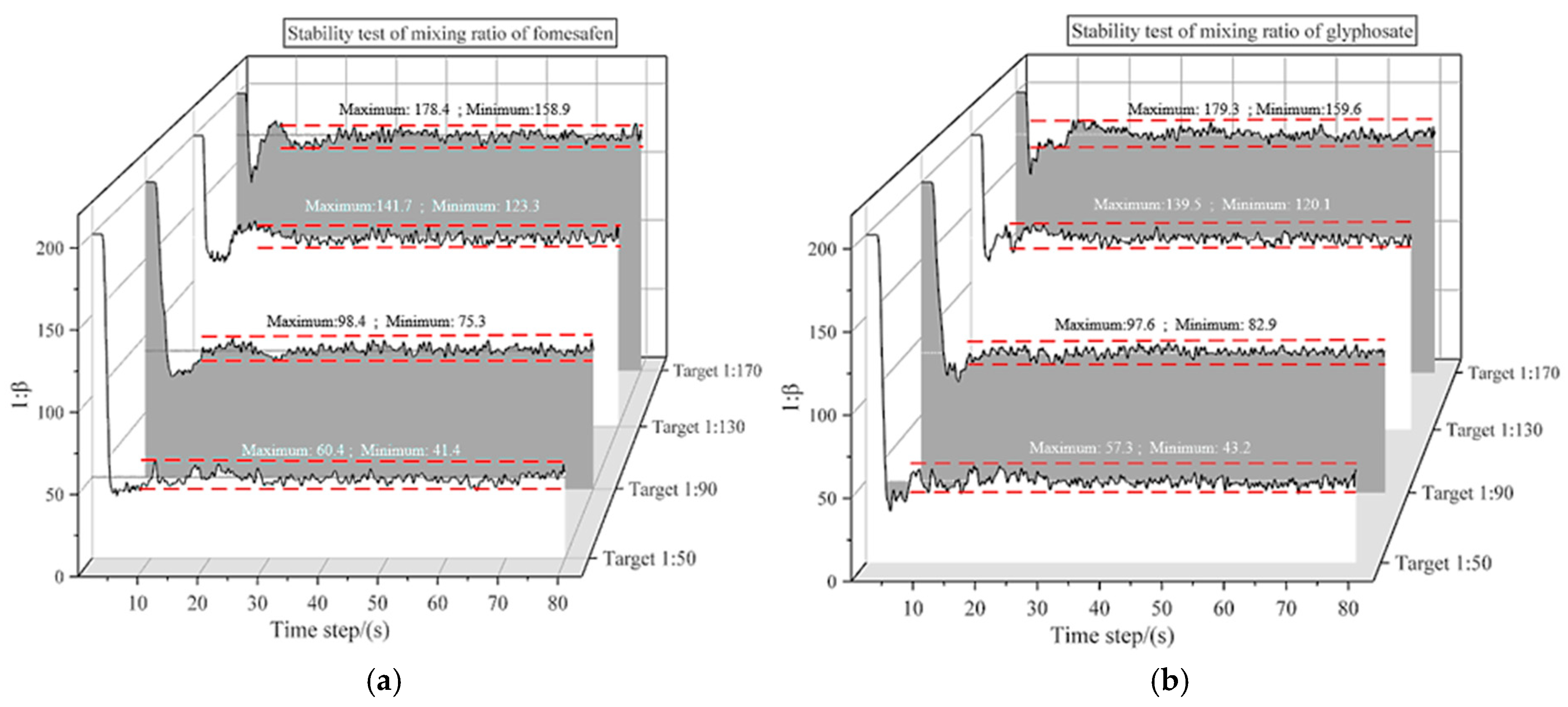
3.2. Stability Test of Mixing Ratio Adjustment for Two-Path Inline Mixing System
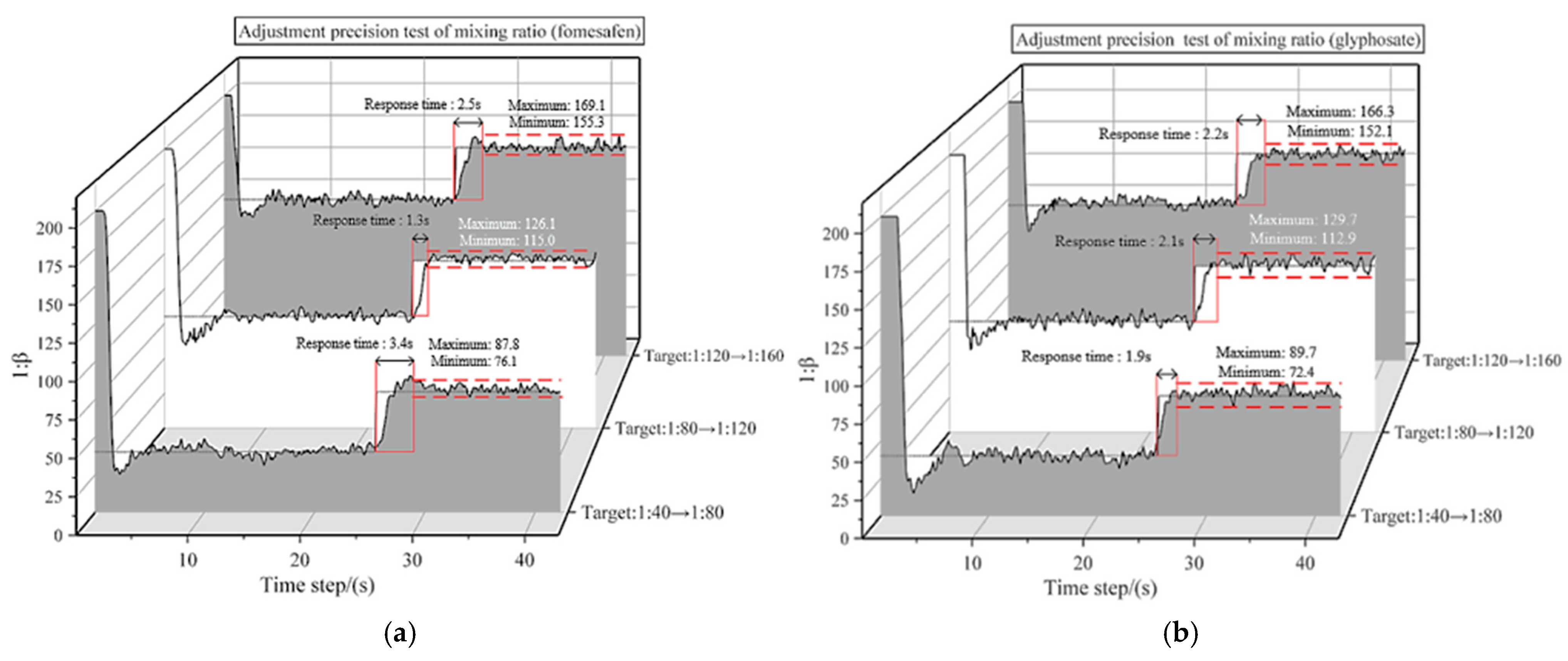
3.3. Tests on Accuracy and Response Time of Mixing Ratio Adjustment of Two-Path Inline Mixing System
4. Discussion
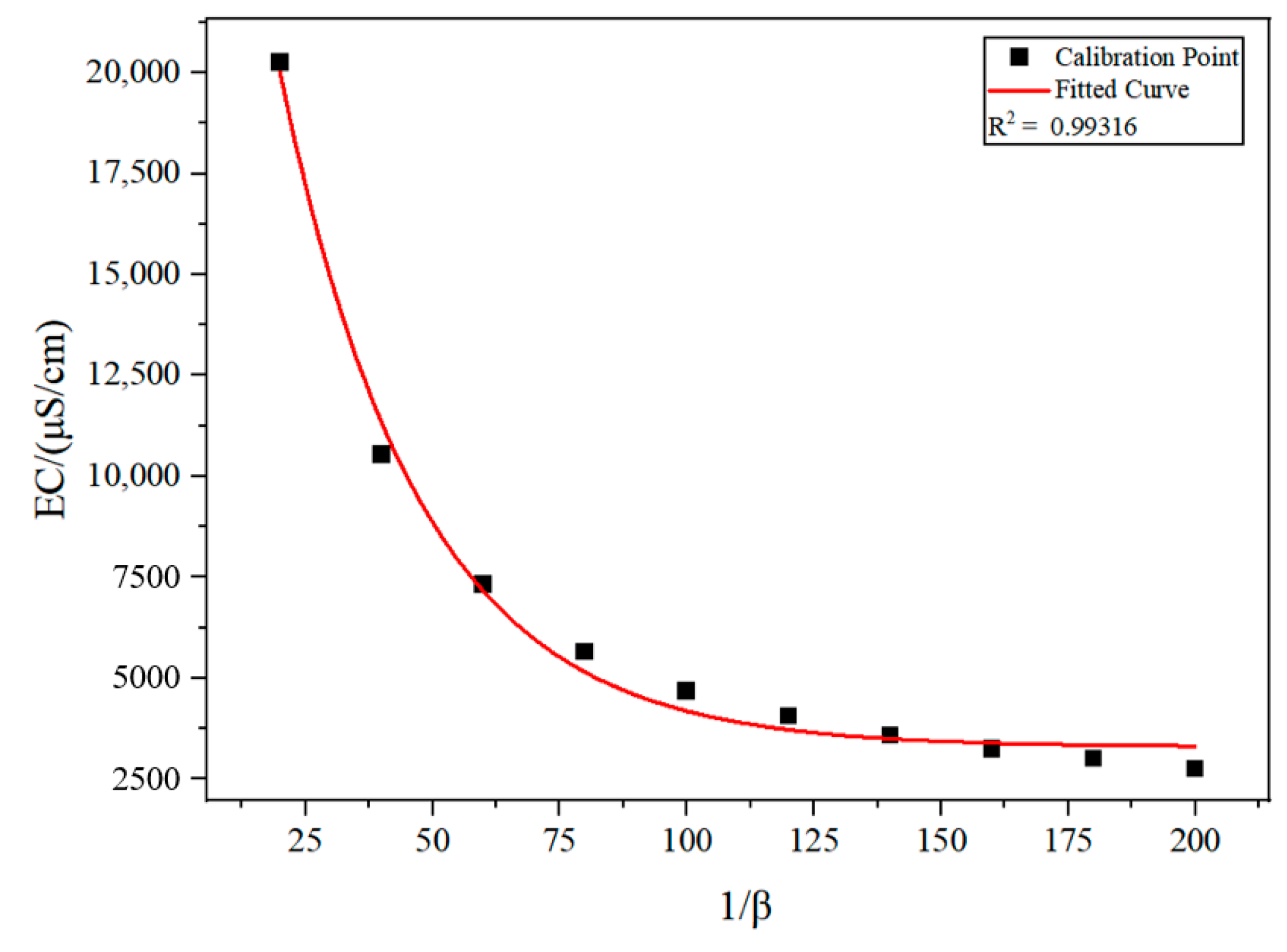
- (1)
- Utilizing the DDS-11A conductivity transmitter, preliminary experiments were conducted to derive a mathematical mode for the conductivity values of the fomesafen and glyphosate mixtures.
- (2)
- Based on the traditional single-path inline pesticide mixing system, the direct injection dual-path inline pesticide mixing system was extended to cover the entire spectrum of pesticide spraying applications. Leveraging a fuzzy PID control algorithm, we designed the control system and principles for the direct injection dual-path inline mixing system including its physical connection diagram and control flowchart. After developing a method to calculate the real-time mixing ratio data using flow signals, we conducted a spray consistency test to verify the feasibility of the direct injection dual-path inline mixing system.
- (3)
- The designed direct injection dual-path inline mixing module was integrated into the 3WPG-300 high-clearance self-propelled sprayer, which served as the test platform for field trials. Multiple groups of tests were conducted to ensure the uniformity of mixing and the precision control of the mixing ratio. The maximum coefficient of variation for the mixing ratio was 9.7%, indicating good mixing uniformity. The maximum standard deviation of the mixing ratio was approximately 2.2%, with a maximum average deviation of less than 1.5%, demonstrating excellent stability in adjusting the mixing ratio. When the target mixing ratio was set as a step signal, the maximum average deviation remained below 2.7%, and the maximum response time was 3.4 s, confirming that the mixing ratio can be adjusted accurately and promptly.
5. Conclusions
- (1)
- A direct injection dual-path inline pesticide mixing system was designed to fulfill the requirements of corn-soybean strip intercropping mode. This system enables the simultaneous pesticide application for both crops, thereby enhancing the efficiency and convenience of weed control operations while significantly reducing the pesticide waste. Through calibration, we established the relationship between the mixing ratio and conductivity of herbicides commonly used in corn and soybean fields. Additionally, we designed the control system and control flowchart for the direct injection dual-path inline mixing system. Experimental validation confirmed the feasibility of calculating the real-time mixing ratio of the water solvent flow and pesticide injection flow data collected by high-precision flow transmitters.
- (2)
- In order to enhance installation convenience and minimize space occupancy, the pesticide mixing injection module within the designed direct injection dual-path inline pesticide mixing system was integrated, and an optimized overall pipeline layout was implemented. Post-integration, the pesticide mixing injection module retained only essential outlet and inlet ports. Using the 3WPG-300 high-clearance self-propelled sprayer developed by our team as a test platform, the designed direct injection dual-path inline mixing system was installed, and the original pipeline configuration and nozzle positions were adjusted according to the agronomic requirements of the corn-soybean strip intercropping mode. Spray consistency tests revealed that the maximum coefficient of variation in spray volume uniformity across 18 nozzles was 5.96%, indicating excellent spray consistency. Mixing uniformity tests confirmed that the maximum coefficient of variation of mixing uniformity in pesticide injection mixing ratio was 9.7%, demonstrating satisfactory mixing uniformity. Therefore, the designed direct injection dual-path inline pesticide mixing system meets the fundamental requirements for pesticide application in agricultural machinery.
- (3)
- A control strategy for the two-path inline pesticide mixing system was developed, and its stability, accuracy, and response time were evaluated using a sprayer equipped with a direct injection dual-path inline mixing system. The stability test results indicated that the maximum standard deviation of the mixing ratio was approximately 2.2%, while the maximum average deviation was less than 1.5%. These findings confirm that the mixing ratio stability is satisfactory and meets the operational requirements of the sprayer’s inline mixing system in field applications. From the tests on the adjustment accuracy and response time, it was observed that when the target mixing ratio followed a step signal, the maximum average deviation of the mixing ratio was less than 2.7%, and the maximum response time was 3.4 s. Both the mean deviation and response time decreased as the target mixing ratio decreased. Consequently, these results validate that the designed dual-path inline pesticide mixing system can fulfill the demands for stable, accurate, and rapid adjustment of the pesticide mixing ratio required by plant protection machinery in the corn-soybean strip intercropping mode, demonstrating excellent working performance.
- (4)
- Based on the aforementioned conclusions, future research will concentrate on enhancing the performance of the inline pesticide mixing system utilized in the corn-soybean strip intercropping mode. Specifically, efforts will be directed toward designing a high-performance inline pesticide mixing system, optimizing the actuator selection, refining the system’s operational principles, and advancing the detection technology for pesticide mixing ratios. Potential approaches include employing control algorithms integrated with artificial neural networks or utilizing image processing techniques for the real-time monitoring of mixing ratios and uniformity. These improvements aim to significantly enhance the stability, accuracy, and speed of mixing ratio adjustments.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Čerkasova, N.; White, M.; Arnold, J.; Bieger, K.; Allen, P.; Gao, J.; Gambone, M.; Meki, M.; Kiniry, J.; Gassman, P.W. Field scale SWAT+ modeling of corn and soybean yields for the contiguous United States: National Agroecosystem Model Development. Agric. Syst. 2023, 210, 103695. [Google Scholar] [CrossRef]
- Grassini, P.; Torrion, J.; Cassman, K.; Yang, H.S.; Specht, J.E. Drivers of spatial and temporal variation in soybean yield and irrigation requirements in the western US Corn Belt. Field Crops Res. 2014, 163, 32–46. [Google Scholar] [CrossRef]
- Wang, G.; Feng, S.; Han, X.; Zheng, H.; Bai, C.; Li, G.; Zhao, G. Response of rhizosphere microbial community structure and production performance of corn and soybean to belt planting mode. Front. Sustain. Food Syst. 2024, 8, 1387728. [Google Scholar] [CrossRef]
- Wang, F. Application and extension of high yield planting technology of soybean and corn belt. Seed World 2024, 11, 105–107. [Google Scholar]
- Wu, J.; Yan, B. Stable grain guarantee to see 5 counties how to fight spring ploughing. Bazhong Daily, 17 March 2022. [Google Scholar] [CrossRef]
- Griffith, D.; Parsons, S.; Mannering, J. Mechanics and adaptability of ridge-planting for corn and soya bean. Soil Tillage Res. 1990, 18, 113–126. [Google Scholar] [CrossRef]
- Kheam, S.; Rubene, D.; Markovic, D.; Ith, S.; Uk, O.; Soung, S.; Ninkovic, V. The effects of cultivar mixtures on insect pest and natural enemy abundance, diseases, and yield in tropical soybean cropping system. Biol. Control 2024, 196, 105571. [Google Scholar] [CrossRef]
- Glaser, J.; Matten, S. Sustainability of insect resistance management strategies for transgenic Bt corn. Biotechnol. Adv. 2003, 22, 45–69. [Google Scholar] [CrossRef] [PubMed]
- Cui, H.; Sciligo, A.; Tan, X.; Hui, C.; Zhang, Y.; Li, W.; Zhou, Z.-Q.; Peng, Z.-Q.; Ma, P.; Xiao, Z.-S.; et al. Dynamic trends in maize diseases and pests across six regions in China over two decades. Crop Prot. 2024, 186, 106930. [Google Scholar] [CrossRef]
- Zhang, Z. Practice and reflection on the extension of soybean and corn belt composite planting technology. Agric. Dev. Equip. 2024, 06, 172–174. [Google Scholar]
- Gan-Mor, S.; Matthews, G. Recent developments in sprayers for application of biopesticides—An overview. Biosyst. Eng. 2003, 84, 119–125. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, Y.; Guo, P.; Zhang, S.; Jin, H.; Adilet, S.; Chen, J. Design and experimentation of direct injection in-line mixing control system for sprayers. Comput. Electron. Agric. 2024, 226, 109304. [Google Scholar] [CrossRef]
- Jiang, X.; Wang, Z.; Bai, X.; Xiong, F.; Li, D. Design and Experiment of injection-type Intelligent Online Mixing Pesticide Control System. In Proceedings of the 2019 IEEE 2nd International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 22–24 November 2019; pp. 379–384. [Google Scholar]
- Han, Z. Design and Experiment of on-Line Mixing System of Sprayer for Soybean and Corn Strip Compound Planting. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2022. [Google Scholar] [CrossRef]
- Dai, X.; Xu, Y.; Chen, J.; Zheng, J.; Song, H.; Ma, L. Improved jet mixer injection nozzle enhancing pesticide mixing uniformity and dynamic concentration consistency. Trans. Chin. Soc. Agric. Eng. 2019, 35, 65–74. [Google Scholar]
- Sun, D.; Liu, W.; Li, Z.; Zhan, X.; Dai, Q.; Xue, X.; Song, S. Numerical experiment and optimized design of pipeline spraying on-line pesticide mixing apparatus based on CFD orthogonal experiment. Agronomy 2022, 12, 1059. [Google Scholar] [CrossRef]
- Qiu, B.; Ma, J.; Deng, B.; Ou, M.; Dong, X. Experiment on mixing performance of on-line mixing spray system. Trans. Chin. Soc. Agric. Eng. 2014, 30, 78–85. [Google Scholar]
- Wu, X.; Zhang, Y.; Du, P.; Xu, J.; Dong, F.; Liu, X.; Zheng, Y. Impact of fomesafen on the soil microbial communities in soybean fields in Northeastern China. Ecotoxicol. Environ. Saf. 2018, 148, 169–176. [Google Scholar] [CrossRef] [PubMed]
- Fazal, A.; Yang, M.; Wang, X.; Lu, Y.; Yao, W.; Luo, F.; Han, M.; Song, Y.; Cai, J.; Yin, T.; et al. Discrepancies in rhizobacterial assembly caused by glyphosate application and herbicide-tolerant soybean Co-expressing GAT and EPSPS. J. Hazard. Mater. 2023, 450, 131053. [Google Scholar] [CrossRef] [PubMed]
- Cao, S.; Zou, Y.; Zhang, S.; Zhang, H.; Guan, Y.; Liu, L.; Ji, M. Investigation of resistance mechanisms to Fomesafen in Ipomoea nil from China. Pestic. Biochem. Physiol. 2023, 194, 105487. [Google Scholar] [CrossRef]
- Boretti, A. Comprehensive risk-benefit assessment of chemicals: A case study on glyphosate. Toxicol. Rep. 2024, 13, 101803. [Google Scholar] [CrossRef]
- Li, W.; Wang, K.; Wang, P.; Yang, P.; Xu, S.; Tong, J.; Zhang, Y.; Yang, Y.; Han, L.; Ye, M.; et al. Impact of Glyphosate on Soil Bacterial Communities and Degradation Mechanisms in Large-Leaf Tea Plantations. J. Hazard. Mater. 2024, 483, 136626. [Google Scholar] [CrossRef]
- Carvalho, F.; Antuniassi, U.; Chechetto, R.; Mota, A.; Jesus, M.; Carvalho, L. Viscosity, surface tension and droplet size of sprays of different formulations of insecticides and fungicides. Crop. Prot. 2017, 101, 19–23. [Google Scholar] [CrossRef]
- Takamura, K.; Fischer, H.; Morrow, N. Physical properties of aqueous glycerol solutions. J. Pet. Sci. Eng. 2012, 98, 50–60. [Google Scholar] [CrossRef]
- Hammadi, A. Electrical conductance, density, and viscosity in mixtures of alkali-metal halides and glycerol. Int. J. Thermophys. 2004, 25, 89–111. [Google Scholar] [CrossRef]
- Golnabi, H.; Matloob, M.; Bahar, M.; Sharifian, M. Investigation of electrical conductivity of different water liquids and electrolyte solutions. Iran. Phys. J. 2009, 3-2, 24–28. [Google Scholar]
- Zhang, Z.; Zhu, H.; Guler, H.; Shen, Y. Improved premixing in-line injection system for variable-rate orchard sprayers with Arduino platform. Comput. Electron. Agric. 2019, 162, 389–396. [Google Scholar] [CrossRef]
- Dai, X.; Xiao, J.; Xu, Y.; Song, H. Flow characteristics and control method for solenoid valve controlled target spraying under dynamic conditions. Jiangsu J. Agric. Sci. 2019, 35, 476–483. [Google Scholar]
- Yang, Y.; Wang, G.; Zhai, X.; Tao, D.; Wu, T.; Cui, Y. Experimental study on performance of on-line detection device for mixed drug concentration based on linear CCD. J. Chin. Agric. Mech. 2019, 10, 142–146. [Google Scholar]
- Dai, X.; Xu, Y.; Zheng, J.; Ma, L.; Ding, F.; Guo, C. Analysis Method and Experiments of Inline Mixing Water Dispersible Granules Pesticides Based on 3D Image Reconstruction. Trans. Chin. Soc. Agric. Mach. 2020, 51, 98–107. [Google Scholar]
- Dai, X.; Xu, Y.; Song, H.; Chen, J.; Kuang, L.; Ma, L. Mixing Uniformity Analysis Methods and In-line Mixing Experimentsof Mixer under Variable Working Conditions. Trans. Chin. Soc. Agric. Mach. 2018, 49, 172–179. [Google Scholar]
- Zhou, L.; Hu, C.; Chen, Y.; Guo, P.; Zhang, L.; Liu, J.; Chen, Y. Research and Experiment on Cruise Control of a Self-Propelled Electric Sprayer Chassis. Agriculture 2024, 14, 902. [Google Scholar] [CrossRef]
- Lu, L.; Zhang, J.; Chen, J.; Chen, Y.; Hu, C.; Cao, J. Optimized design of the high clearance sprayer chassis suspension consideringtank liquid shaking. Trans. Chin. Soc. Agric. Eng. 2023, 39, 15–25. [Google Scholar]
- Chen, Y.; Lu, L.; Zhang, J.; Chen, J.; Hu, C.; Cao, J. Construction and Application of Equivalent Mechanical Model of Liquid Longitudinal Sloshing in Sprayer Tank. Trans. Chin. Soc. Agric. Mach. 2023, 54, 173–182+195. [Google Scholar]
- Zhou, L.; Hu, C.; Chen, Y.; Guo, P.; Liu, J.; Chen, Y.; Cao, J. Research on a Chassis Stability Control Method for High-Ground-Clearance Self-Propelled Electric Sprayers. Appl. Sci. 2024, 14, 7734. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Fomesafen Stock Solution (mL) | Water (mL) | Mixing Ratio | Mean Conductivity (μS/cm) |
|---|---|---|---|---|
| 1 | 5 | 100.0 | 1:20 | 568.6 |
| 2 | 5 | 200.0 | 1:40 | 441.3 |
| 3 | 5 | 300.0 | 1:60 | 401.8 |
| 4 | 5 | 400.0 | 1:80 | 378.6 |
| 5 | 5 | 500.0 | 1:100 | 364.5 |
| 6 | 5 | 600.0 | 1:120 | 358.7 |
| 7 | 5 | 700.0 | 1:140 | 353.8 |
| 8 | 5 | 800.0 | 1:160 | 349.5 |
| 9 | 5 | 900.0 | 1:180 | 347.8 |
| 10 | 5 | 1000.0 | 1:200 | 342.2 |
| No. | Fomesafen Stock Solution (mL) | Water (mL) | Mixing Ratio | Mean Conductivity (μS/cm) |
|---|---|---|---|---|
| 1 | 5 | 100.0 | 1:20 | 20,258.7 |
| 2 | 5 | 200.0 | 1:40 | 10,537.6 |
| 3 | 5 | 300.0 | 1:60 | 7324.9 |
| 4 | 5 | 400.0 | 1:80 | 5649.2 |
| 5 | 5 | 500.0 | 1:100 | 4687.4 |
| 6 | 5 | 600.0 | 1:120 | 4061.8 |
| 7 | 5 | 700.0 | 1:140 | 3578.3 |
| 8 | 5 | 800.0 | 1:160 | 3238.4 |
| 9 | 5 | 900.0 | 1:180 | 3012.5 |
| 10 | 5 | 1000.0 | 1:200 | 2751.9 |
| e (Error) | ec (Rate of Error Change) | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB | PB | PM | PM | PS | ZO | ZO |
| NM | PB | PB | PM | PS | PS | ZO | NS |
| NS | PM | PM | PM | PS | ZO | NS | NS |
| ZO | PM | PM | PS | ZO | NS | NM | NM |
| PS | PS | PS | ZO | NS | NS | NM | NM |
| PM | PS | ZO | NS | NM | NM | NM | NB |
| PB | ZO | ZO | NM | NM | NM | NB | NB |
| e (Error) | ec (Rate of Error Change) | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | NB | NB | NM | NM | NS | ZO | ZO |
| NM | NB | NB | NM | NS | NS | ZO | ZO |
| NS | NB | NM | NS | NS | ZO | PS | PS |
| ZO | NM | NM | NS | ZO | PS | PM | PM |
| PS | NM | NS | ZO | PS | PS | PM | PB |
| PM | ZO | ZO | PS | PS | PM | PB | PB |
| PB | ZO | ZO | PS | PM | PM | PB | PB |
| e (Error) | ec (Rate of Error Change) | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PS | NS | NB | NB | NB | NM | PS |
| NM | PS | NS | NB | NM | NM | NS | ZO |
| NS | ZO | NS | NM | NM | NM | NS | ZO |
| ZO | ZO | NS | NS | NS | NS | NS | ZO |
| PS | ZO | ZO | ZO | ZO | ZO | ZO | ZO |
| PM | PB | NS | NS | PS | PS | PS | PB |
| PB | PB | PM | PM | PM | PS | PS | PB |
| No. | The Inverse of the Target Mixing Ratio | Target Conductivity (μS/cm) | Actual Conductivity (μS/cm) | Value of Error (μS/cm) | Percentage of Error (%) |
|---|---|---|---|---|---|
| 1 | 20 | 20,258.7 | 19,849.5 | 409.2 | 2.0 |
| 2 | 40 | 10,537.6 | 9968.1 | 569.5 | 5.4 |
| 3 | 60 | 7324.9 | 7456.6 | 131.7 | 1.8 |
| 4 | 80 | 5649.2 | 5361.7 | 287.5 | 5.1 |
| 5 | 100 | 4687.4 | 4598.3 | 89.1 | 1.9 |
| 6 | 120 | 4061.8 | 3964.5 | 97.3 | 2.4 |
| 7 | 140 | 3578.3 | 3688.4 | 110.1 | 1 |
| 8 | 160 | 3238.4 | 3165.2 | 73.2 | 2.3 |
| 9 | 180 | 3012.5 | 2948.9 | 63.6 | 2.1 |
| 10 | 200 | 2751.9 | 2649.8 | 102.1 | 3.7 |
| Nozzle Serial Number | Electrical Conductivity Value of Pesticide Solution | Mixing Ratio of Test 1 | Mixing Ratio of Test 2 | Mixing Ratio of Test 3 | ||
|---|---|---|---|---|---|---|
| Test 1 | Test 2 | Test 3 | ||||
| 1 | 355.9 | 353.2 | 353.3 | 0.00868 | 0.00761 | 0.00764 |
| 2 | 353.0 | 357.3 | 352.3 | 0.00753 | 0.00912 | 0.00716 |
| 3 | 359.2 | 354.5 | 352.7 | 0.00966 | 0.00815 | 0.00725 |
| 4 | 356.8 | 351.9 | 352.6 | 0.00897 | 0.00688 | 0.00729 |
| 5 | 355.4 | 354.7 | 351.9 | 0.00850 | 0.00824 | 0.00688 |
| 6 | 358.1 | 351.8 | 351.7 | 0.00936 | 0.00683 | 0.00677 |
| 7 | 353.7 | 353.4 | 354.4 | 0.00782 | 0.00770 | 0.00813 |
| 8 | 357.9 | 353.2 | 353.6 | 0.00930 | 0.00759 | 0.00779 |
| 9 | 351.8 | 353.9 | 350.5 | 0.00682 | 0.00792 | 0.00553 |
| 10 | 357.4 | 355.0 | 353.1 | 0.00915 | 0.00835 | 0.00756 |
| 11 | 356.3 | 352.0 | 351.5 | 0.00881 | 0.00697 | 0.00658 |
| 12 | 354.5 | 352.8 | 354.5 | 0.00817 | 0.00743 | 0.00815 |
| 13 | 3386.8 | 3471.5 | 3425.6 | 0.00618 | 0.00694 | 0.00657 |
| 14 | 3474.9 | 3519.7 | 3426.4 | 0.00697 | 0.00727 | 0.00658 |
| 15 | 3357.4 | 3468.6 | 3580.7 | 0.00581 | 0.00692 | 0.00764 |
| 16 | 3465.7 | 3576.5 | 3528.5 | 0.00690 | 0.00761 | 0.00733 |
| 17 | 3523.3 | 3418.9 | 3467.4 | 0.00730 | 0.00651 | 0.00691 |
| 18 | 3469.1 | 3497.3 | 3386.5 | 0.00693 | 0.00713 | 0.00618 |
| No. | Target Mixing Ratio 1:β | Fomesafen | Glyphosate | ||||
|---|---|---|---|---|---|---|---|
| Mean Value of Mixing Ratio | Standard Deviation of Mixing Ratio | Mean Variation (%) | Mean Value of Mixing Ratio | Standard Deviation of Mixing Ratio | Mean Variation (%) | ||
| 1 | 50 | 49.3 | 3.02 | 1.45% | 49.6 | 3.10 | 0.64% |
| 2 | 90 | 90.2 | 3.42 | 0.25% | 90.2 | 2.77 | 0.26% |
| 3 | 130 | 130.2 | 3.37 | 0.13% | 130.1 | 3.05 | 0.07% |
| 4 | 170 | 169.3 | 3.63 | 0.43% | 170.5 | 3.62 | 0.27% |
| No. | Mixing Ratio 1:β | Fomesafen | Response Time (s) | Glyphosate | Response Time (s) | ||||
|---|---|---|---|---|---|---|---|---|---|
| Mean Value of Mixing Ratio | Standard Deviation | Mean Variation (%) | Mean Value of Mixing Ratio | Standard Deviation | Mean Variation (%) | ||||
| 1 | 40–80 | 82.1 | 2.85 | 2.66% | 3.4 s | 82.0 | 2.81 | 2.49% | 1.9 s |
| 2 | 80–120 | 121.4 | 2.19 | 1.18% | 1.3 s | 121.9 | 3.09 | 1.55% | 2.1 s |
| 3 | 120–160 | 160.6 | 3.18 | 0.35% | 1.5 s | 159.5 | 2.96 | 0.34% | 2.2 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Guo, P.; Ma, H.; Chen, Y.; Chen, Y. Experimental Investigation of Dual-Path Inline Mixing System for Sprayers in Corn-Soybean Strip Intercropping Mode. Agriculture 2025, 15, 247. https://doi.org/10.3390/agriculture15030247
Zhang Z, Guo P, Ma H, Chen Y, Chen Y. Experimental Investigation of Dual-Path Inline Mixing System for Sprayers in Corn-Soybean Strip Intercropping Mode. Agriculture. 2025; 15(3):247. https://doi.org/10.3390/agriculture15030247
Chicago/Turabian StyleZhang, Zhenyu, Peijie Guo, Hongying Ma, Yuxiang Chen, and Yu Chen. 2025. "Experimental Investigation of Dual-Path Inline Mixing System for Sprayers in Corn-Soybean Strip Intercropping Mode" Agriculture 15, no. 3: 247. https://doi.org/10.3390/agriculture15030247
APA StyleZhang, Z., Guo, P., Ma, H., Chen, Y., & Chen, Y. (2025). Experimental Investigation of Dual-Path Inline Mixing System for Sprayers in Corn-Soybean Strip Intercropping Mode. Agriculture, 15(3), 247. https://doi.org/10.3390/agriculture15030247