
Analysis and Evaluation of Harvest Quality Effectiveness of Carrot Clamping and Conveying Device



Abstract
:1. Introduction
2. Materials and Methods
2.1. Material Preparation
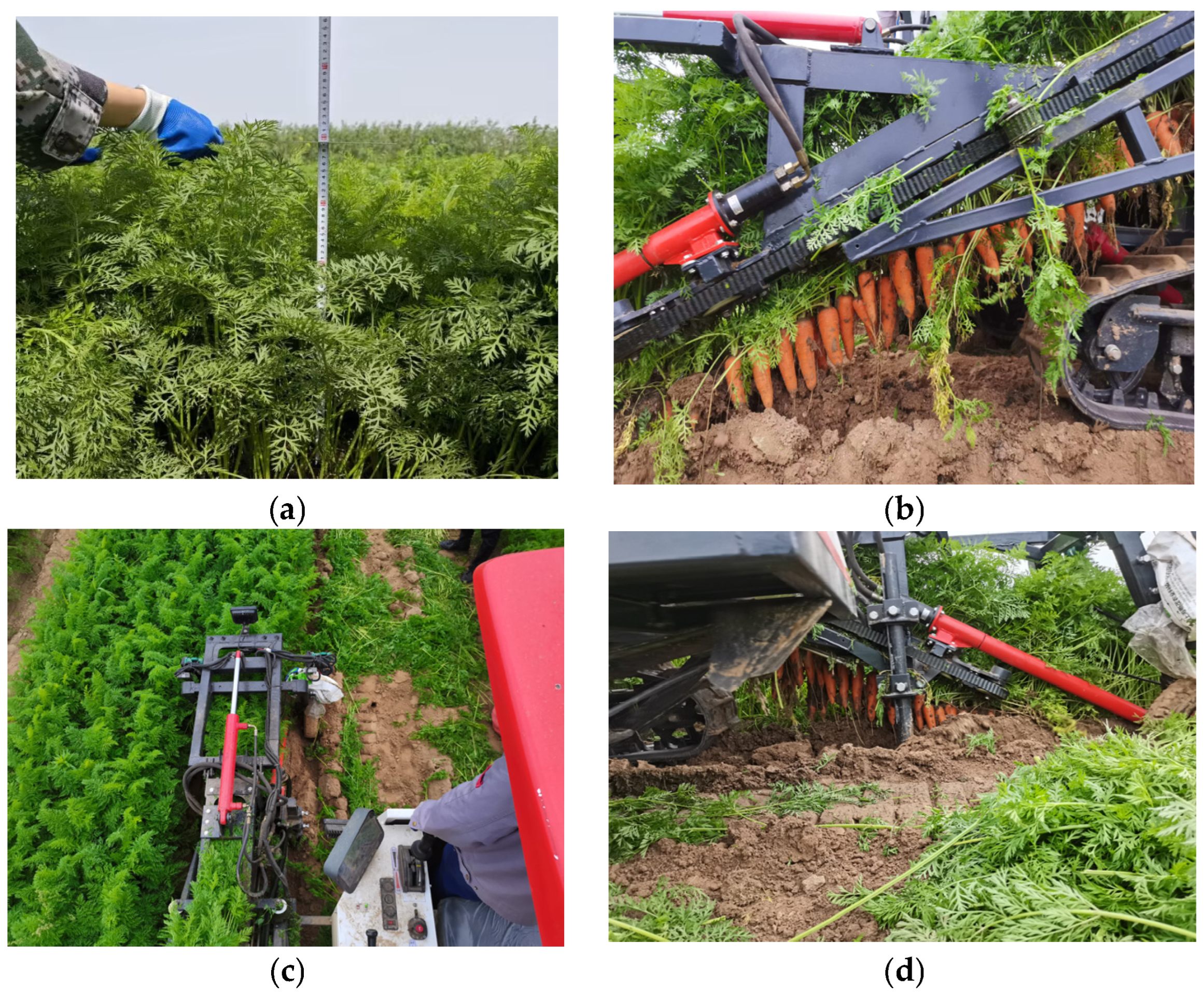
2.2. Carrot Holding and Extraction Test Platform
2.3. Measurement Methods
2.4. Test Indicators and Methods
2.4.1. Damage Rate Measurement Method
2.4.2. Measurement of Leakage Rate
3. Results
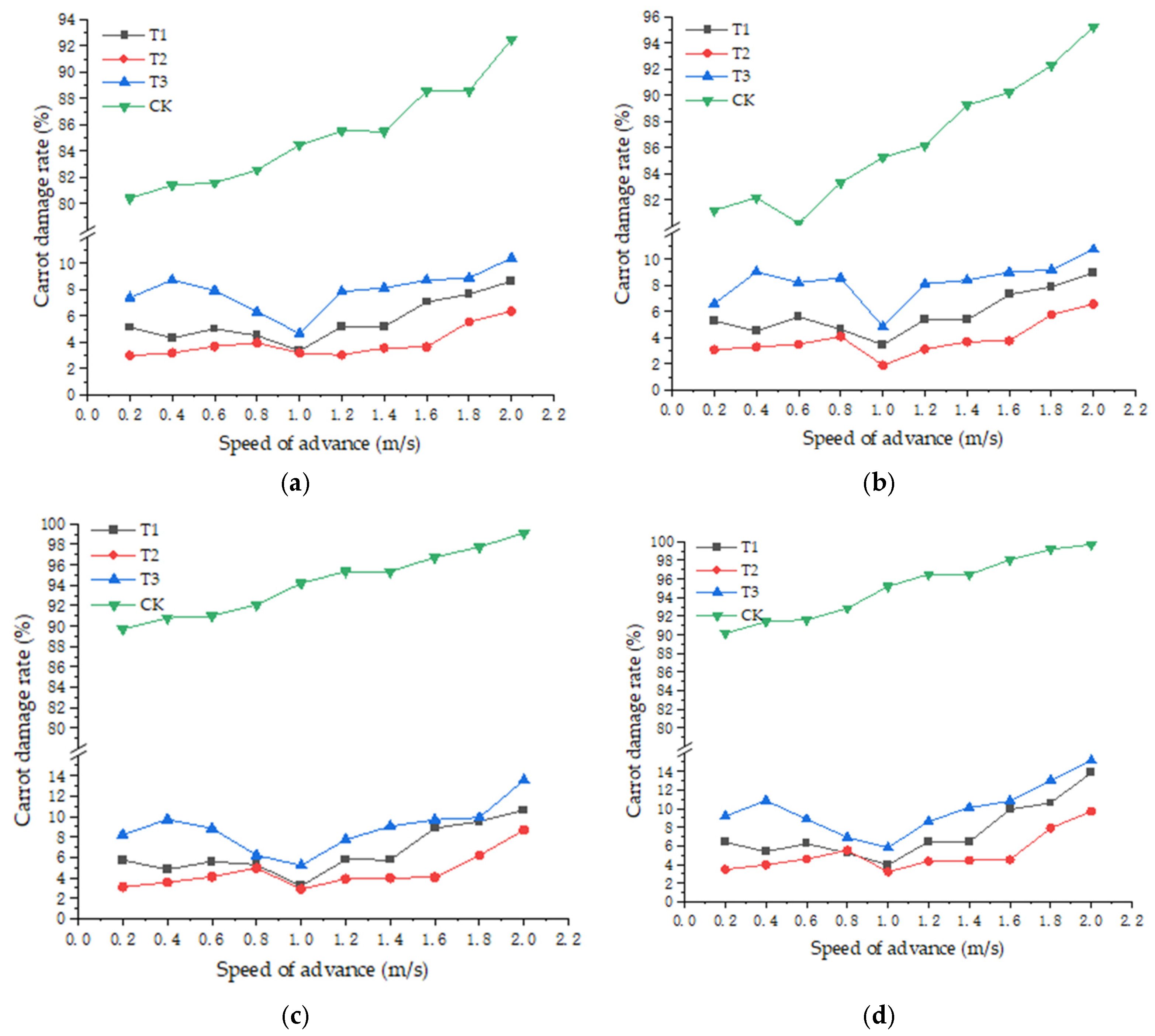
3.1. Influence of Clamping Conveyor on Damage Rate at Different Forward Speeds
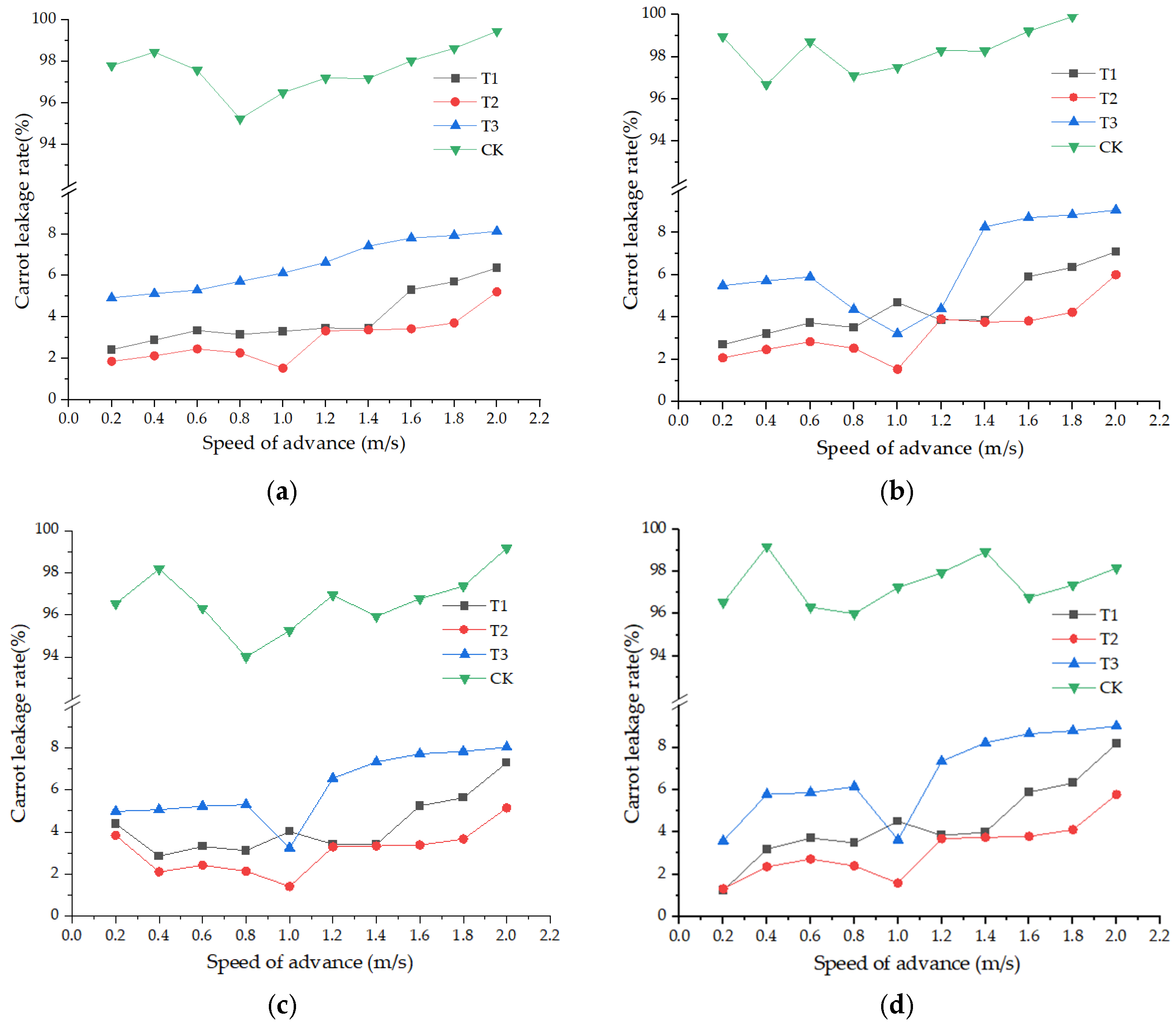
3.2. Influence of Different Test Levels on Leakage Rate
3.3. Effects of Different Levels of Carrot Tassel Height on Injury Rate
4. Discussion
- (1)
- Due to subjective and objective factors such as time and conditions, this study analyzed the damage rate and leakage rate of two varieties of carrots by setting up tests at T1, T2, T3, and CK clamping and conveying speed levels and 10 forward speed levels, focusing on the macroscopic point of view, and did not conduct in-depth research on the characteristics and laws of the movement of the carrot plant and carrots in the different clamping and conveying devices, which will be analyzed in the next step with the help of high-resolution high-speed photography. The next step is to study the motion characteristics and laws with the help of high-resolution high-speed photography.
- (2)
- Due to the limitations of the research program and experimental conditions, the test objects in this paper are only two carrot varieties, and the changes in the breaking force of the stem pieces, the breaking force of the stem pieces and their mechanical properties with the speed of clamping and conveying, and the changes in the various parts of the stem pieces and the various components of the clamping and conveying device and the way of the force are not the same in different carrot varieties, so in subsequent experiments, we will carry out research on more carrot varieties, and explore the different characteristics of the clamping and conveying device in different carrot varieties, and then we will investigate the characteristics and laws of different carrot varieties. In a subsequent test, we will study more carrot varieties, explore the operation index law of various clamping and conveying devices in different carrot varieties under different clamping and conveying speeds, and find out the most suitable clamping and pulling and conveying speeds and clamping and conveying devices under the advancing speeds suitable for various carrot varieties.
5. Application Value and Suggestions
6. Conclusions
- (1)
- At the level of T1, T2 and T3, the effect of the change trend of the damage rate of the two carrot varieties at the clamping and conveying speed showed high consistency, the average damage rate of Xiahong2 in the two years was 6.13%, 3.53%, and 9.36%, and the average damage rate of Sanhong in the two years was 6.22%, 6.53% and 9.36%. The average damage rates were 6.13%, 3.53%, and 9.36% for Xiahong2 and 6.22%, 3.76%, and 9.88% for Sanhong.
- (2)
- The average carrot missed-pulling rate of two consecutive years corresponding to two carrot varieties, Xiaohong2 and Sanhong, was 3.68% and 4.14%, respectively. As can be seen from the figure, the carrot missed-pulling rate of the control group CK of two carrot varieties, Xiaohong2 and Sanhong, was high and stable at 96.2% to 97.5%. At the same time, T1, T2, and T3 have a similar overall carrot leakage rate trend for two carrot varieties at different clamping and conveying speeds. The average carrot leakage rate of T1, T2, and T3 for Xiahong2 is 3.91%, 3.42%, and 6.22%, and that of T1, T2, and T3 for Sanhong is 4.06%, 3.58%, and 6.08%.
- (3)
- The distributional effects of damage rates under the H1, H2, and H3 conditions showed obvious consistency. For Xiahong2, the damage of the three types of carrots, short, medium, and tall, after the T1 test was 5.12% under the H1 test condition, 4.73% under the H2 test condition, and 6.19% under the H3 test condition, and the average damaged weight ratio was 2.9:3.2:5.4; for Sanhong, the damage of three carrot types, short, medium, and tall, after the T1 test was 5.69% under the H1 test condition, 5.24% under the H2 test condition, and 6.78% under the H3 test condition, and the average damaged weight ratio of the three carrot types, short, medium, and tall, was 2.8:3.1:5.9; for Sanhong, the distributional effects of T1, T2, and T3 on its damage rate under different clamping and conveying speeds showed a clear consistency, and the test showed that carrot tassel heights ≤ 22 cm were more susceptible to being damaged.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zeng, G.J.; Chen, J.N.; Xia, X.D. Design and Experiment on Pull Type of Tassel Fruit Separation for Carrot. Trans. Chin. Soc. Agric. Mach. 2018, 49, 73–79. (In Chinese) [Google Scholar]
- Gong, Y.; Tong, L.; Qin, J. Design and experiment on carrot micro-comminution cutters. Trans. Chin. Soc. Agric. Eng. 2012, 28, 64–69. (In Chinese) [Google Scholar]
- Jin, W.; Xiang, L.; Peng, G.; Ming, N.; Qi, W.; Wen, Z. Design and Experiment of High Efficiency Drag Reducing Shovel for Carrot Combine Harvester. Trans. Chin. Soc. Agric. Mach. 2020, 51, 93–103. (In Chinese) [Google Scholar]
- Li, K.F. Research on the Key Techniques of Self-Propelled Carrots Combine Harvester. Master’s Thesis, Chinese Academy of Agricultural Mechanization Sciences, Beijing, China, 2015. [Google Scholar]
- Fu, W.; Chen, H.; Kan, Z. Optimizing parameters on vibration breakshovel of radish harvester. Trans. Chin. Soc. Agric. Eng. 2011, 27, 46–50. (In Chinese) [Google Scholar]
- Cheng, H.; Yu, H.; Wei, L. Influencing factors and reduction strategies of subsoiling tillage resistance. J. Northwest A F Univ. 2016, 44, 202–208. [Google Scholar]
- Wei, H.; Liu, D.; Fu, M.; Zhou, D.; Wu, B. Design and DEM Analysis of Bionic Drag-reducing Slant Column Subsoilers. Agric. Eng. 2022, 12, 84–88. (In Chinese) [Google Scholar]
- Yao, S. Research on the Design of Combined Harvesting Technology and Device of Pulling White Radish. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2022. [Google Scholar]
- Guan, R. Design and Experiment of Bionic Single Disc to Top Cutting Device for Carrot Combine Harvester. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2020. [Google Scholar]
- Qiu, Z.; Zhang, H.; Zhang, F.; Mao, P.; Ma, Y. Simulation analysis of Corrugated bionic deep slooping Shovel based on Finite element Method. Jiangsu Agric. Sci. 2018, 46, 201–203. [Google Scholar]
- Xu, Z.H. Study on Impact Damage Mechanism of Carrot Root-stem Pulling Separation and Development of Separation Device. Master’s Thesis, Zhejiang Sci-Tech University, Hangzhou, China, 2021. [Google Scholar]
- Zhao, Z.H.; Wang, J.S.; Yang, L.L.; Shao, Z.T. Optimal Design of Carrot Digging Shovel Based on Discrete Element Method. J. Agric. Mech. Res. 2024, 46, 139–145. (In Chinese) [Google Scholar]
- Liu, Q. Design and Research on Key Components of Excavating Radish Combine Harvester. Master’s Thesis, Shandong Agricultural University, Tai’an, China, 2019. [Google Scholar]
- Shao, S.T.; Wang, J.S.; Zhao, Z.H.; Zang, D.C.; Liu, Y. Analysis of Motiom and Mechanical Properties of Digging Parts of Carrot Combine Harvester. J. Agric. Mech. Res. 2024, 46, 49–54+59. (In Chinese) [Google Scholar]
- Yao, S.; Xue, Z.; Miao, L.; Tan, J.; Huang, Y.C.; Zhao, Z. Design and experiment of pulling white radish combine harvester. J. Chin. Agric. Mech. 2023, 44, 27–33. (In Chinese) [Google Scholar]
- Li, X. Structural Design and Experimental Study of High Efficiency Drag Reducing Shovel for Carrot Combine Harvester. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2020. [Google Scholar]
- Gowripathi, N.N.V.R.; Chaudhary, H.; Sharma, A.K. Kinematic analysis of bionic vibratory tillage subsoiler. In Advances in Engineering Design; Springer: Singapore, 2018; pp. 187–195. [Google Scholar]
- Li, B.; Chen, Y.; Chen, J.S.; Research, T. Modeling of soil–claw interaction using the discrete element method (DEM). Soil Tillage Res. 2016, 158, 177–185. [Google Scholar] [CrossRef]
- Zhang, Z.; Gan, S.; Zuo, G.; Tong, J. Bionic Design and Performance Experiment of Sandfish Head Inspired Subsoiler Tine. Trans. Chin. Soc. Agric. Mach. 2021, 52, 33–42. (In Chinese) [Google Scholar]
- Zhao, Z.Q.; Liu, D.W.; Xiao, X.; Xie, F.P.; Zheng, P.; Li, X. Study and experiment on the key factors affecting the extraction force of white radish. J. Hunan Agric. Univ. Nat. Sci. 2024, 50, 95–102. (In Chinese) [Google Scholar]
- Zhang, J.; Tong, J.; Ma, Y. Design and Experiment of Biomimetic Drag Reduction Deep Loose Shovel. Trans. Chin. Soc. Agric. Mach. 2014, 45, 141–145. (In Chinese) [Google Scholar]
- Chen, H.; Ren, K.; Yu, J. Experimental study on Physical and Mechanical Properties of Carrot. Trans. Chin. Soc. Agric. Eng. 2010, 26, 163–169. (In Chinese) [Google Scholar]
- Liu, Z.; Wang, J.; Dai, Q.; Zhang, J.; Zhao, G. Experimental study on geometric parameters and mechanical properties of carrotbased on digging and plucking. J. Agric. Mech. Res. 2021, 43, 176–179+185. (In Chinese) [Google Scholar]
- Liu, J. Research on Parameter Optimization of Subsoiling Shovel and Comprehensive Effect of Loosening Soil Based on Discrete Element Method; China Agricultural University: Guangzhou, China, 2018. [Google Scholar]
- Xia, L. Parameter Optimization and Experimental Research on Subsoiling Shovel Wing Based on Discrete Element Method; Northwest A & F University: Xianyang, China, 2018. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Statistical Indicators | Max | Min | Mean | Standard Deviation | Coefficient of Variation |
|---|---|---|---|---|---|
| Soil moisture content (%) | 29.32 | 23.85 | 25.12 | 0.29 | 0.01 |
| Soil hardness (kPa) | 1450.45 | 769.95 | 1118.02 | 180.85 | 0.16 |
| Soil Bulk Weight (g/cm3) | 1.35 | 1.10 | 1.21 | 0.08 | 0.06 |
| Level | Subdivision No. | Wind Speed/(m/s) | Relative Air Humidity/(%) | Air Temperature/(°C) |
|---|---|---|---|---|
| CK | 3 | 1.92 | 50% | 19.2 |
| 7 | 1.85 | 54% | 21.3 | |
| 9 | 2.36 | 52% | 22.0 | |
| T1 | 22 | 1.91 | 52% | 19.5 |
| 25 | 1.92 | 55% | 20.3 | |
| 4 | 2.01 | 51% | 20.5 | |
| T2 | 8 | 1.91 | 50% | 18.3 |
| 13 | 1.92 | 54% | 19.1 | |
| 11 | 2.01 | 53% | 20.5 | |
| T3 | 6 | 1.91 | 53% | 21.3 |
| 11 | 1.92 | 58% | 21.4 | |
| 2 | 2.01 | 52% | 21.5 |
| Source | Sum of Squares | Freedom | Mean Square | F | p |
|---|---|---|---|---|---|
| Modified model | 510.394 | 29 | 17.600 | 26.445 | 0.000 |
| Intercept | 2996.832 | 1 | 2996.832 | 4503.038 | 0.000 |
| Experimental level | 204.554 | 2 | 102.277 | 153.682 | 0.000 |
| Speed of advance | 268.501 | 9 | 29.833 | 44.828 | 0.000 |
| Interaction between experimental level and forward speed | 37.339 | 18 | 2.074 | 3.117 | 0.003 |
| Error | 19.965 | 30 | 0.666 | ||
| Amount to | 3527.191 | 60 | |||
| Revised total | 530.359 | 59 |
| Model | Non-Standardized Coefficient | Standardized Coefficient | t | p | 95.0% Confidence Interval | ||
|---|---|---|---|---|---|---|---|
| B | Standard Error | Beta | Lower Limit | Upper Limit | |||
| Experimental level grouping | 1.199 | 0.377 | 0.329 | 3.175 | 0.002 | 0.442 | 1.955 |
| Speed of advance | 0.535 | 0.107 | 0.517 | 4.987 | 0.000 | 0.320 | 0.750 |
| Category | Coefficient of Regression | 95% CI | Collinear Diagnosis | |
|---|---|---|---|---|
| VIF | Tolerance | |||
| Constant | 4.159 *** (8.380) | 3.186~5.132 | - | - |
| Height grouping | −0.624 * (−2.323) | −1.150~−0.097 | 1.000 | 1.000 |
| Speed of advance | 2.336 *** (9.995) | 1.878~2.794 | 1.000 | 1.000 |
| R2 | 0.649 | |||
| Adjust R2 | 0.636 | |||
| F | F (2,57) = 52.646, p = 0.000 | |||
| D-W | 1.701 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Hu, Z.; Wu, F.; Gu, F. Analysis and Evaluation of Harvest Quality Effectiveness of Carrot Clamping and Conveying Device. Agriculture 2025, 15, 275. https://doi.org/10.3390/agriculture15030275
Wang B, Hu Z, Wu F, Gu F. Analysis and Evaluation of Harvest Quality Effectiveness of Carrot Clamping and Conveying Device. Agriculture. 2025; 15(3):275. https://doi.org/10.3390/agriculture15030275
Chicago/Turabian StyleWang, Bokai, Zhichao Hu, Feng Wu, and Fengwei Gu. 2025. "Analysis and Evaluation of Harvest Quality Effectiveness of Carrot Clamping and Conveying Device" Agriculture 15, no. 3: 275. https://doi.org/10.3390/agriculture15030275
APA StyleWang, B., Hu, Z., Wu, F., & Gu, F. (2025). Analysis and Evaluation of Harvest Quality Effectiveness of Carrot Clamping and Conveying Device. Agriculture, 15(3), 275. https://doi.org/10.3390/agriculture15030275