Abstract
Potato is an important food crop in China, and its planting area and output rank first in the world. Due to the labor intensity and low efficiency of manual harvesting, mechanized harvesting has become an inevitable solution for the development of the potato industry. In this paper, on the basis of elaborating on mechanized harvesting operation modes for potatoes, the research progress of key technologies, such as top-killing potato seedlings, low-loss digging with reduced obstruction, limiting the depths of rows, high-efficiency separation, sorting tons of packages, and intelligent harvesting in China and abroad, is analyzed. By comparing the basic structure and technical characteristics of both domestic mechanized potato-harvesting equipment and that used abroad, this paper identifies the gaps between domestic equipment’s performance, intelligence level, and adaptability and those of equipment in European and American countries and also identifies bottlenecks, such as large regional variability, the lack of high-efficiency and low-loss separating devices, and the difficulty of breaking through key “chokepoint” technologies. On this basis, this paper proposes that the future development direction of domestic mechanized potato harvesting should focus on the synergistic development of multiple modes, on the research and development of flexible and low-loss separation equipment, and on the integration of intelligent technology; it also gives specific suggestions, aiming to provide references for the future progress of mechanized potato harvesting.
1. Introduction
Potatoes have the advantages of being resistant to barrenness and drought, owing to their high water-use efficiency and high starch content, and have become an indispensable food and vegetable crop [1,2]. Due to the promotion of potatoes following the publication of China’s strategy to make them a staple food in 2015, coupled with the high economic benefits of potatoes, China’s potato-planting area and total potato output were recently ranked first in the world [3,4]. At present, domestic potato harvesting is carried out using either manual harvesting or mechanized harvesting. Manual harvesting is labor-intensive, with low harvesting efficiency and high labor costs [5,6]. Mechanized harvesting is efficient, saves labor, and has low costs. The research and development of mechanized potato-harvesting equipment is necessary for enabling the development of the potato industry [7].
Mechanized potato harvesting encompasses multiple processes, including the top-killing of potato haulms, the digging and conveying of potatoes, the separation of potatoes from soil, the separation of potatoes from offal, and the collection and shipping of potatoes [8,9]. It is generally categorized into segmented harvesting and combined harvesting. Segmented harvesting necessitates manual or mechanical picking after excavation, while combined harvesting integrates multiple processes into a single operation to complete the harvesting task [10]. The research and development of mechanized potato harvesting began early in Europe, America, Japan, South Korea, and other countries. Currently, integrated potato harvesting has largely been realized, with comprehensive and highly intelligent harvesting equipment available. Various models can effectively achieve efficient and low-loss separation, as well as minimize losses during potato collection and transportation [11,12]. However, foreign potato-harvesting machines are typically large and expensive, and there are limited models available for fresh potato research, which does not adequately meet the demands for mechanized potato harvesting across various domestic planting patterns. In China, research on mechanized potato-harvesting equipment commenced relatively late; however, with the maturity of the domestic manufacturing industry and the pressing needs of farmers for mechanized potato-harvesting equipment, significant breakthroughs have been made in recent years [13,14]. Agricultural machinery companies, universities, and research institutes have independently developed a range of mechanical potato-harvesting equipment, including potato seedling top-killing machinery, potato-digging machinery, and potato pickers suitable for segmented harvesting [15,16,17], as well as self-propelled crawler potato combine harvesters, self-propelled wheeled potato combine harvesters, and large towed potato combine harvesters designed for combined harvesting. Researchers have consistently achieved new breakthroughs in key technologies, such as automatic depth limiting for ridge imitation, drag-reducing and consumption-reducing digging, high-efficiency and low-loss separation, and loss-minimizing potato collection and transportation [18,19], gradually approaching the advanced standards of the mechanical potato-harvesting industry in Europe and the United States.
In order to promote the research progress of mechanized potato harvesting technology and equipment and to promote the large-scale intensive development of the potato industry, this paper elucidates mechanized harvesting operation modes for potatoes by analyzing the key technology used in mechanized potato harvesting, both in China and abroad, and sums up the structural parameters of the key devices for mechanized potato harvesting and their operating principles. Using representative models of domestic and foreign mechanized potato-harvesting equipment, this paper also identifies and summarizes the differences between and shortcomings of the equipment used in China and abroad. Within the development of domestic mechanized potato harvesting, there are bottlenecks, such as large regional differences, a lack of high-efficiency and low-loss separation devices, difficulty in breaking through chokepoint technology, etc.; this paper proposes that the common development of multiple modes, the development of flexible and low-loss separation equipment, and the integration of intelligent harvesting technology encompass future trends within the field of research on domestic mechanized potato harvesting and provides specific suggestions and references for the future progress of mechanized potato harvesting research.
2. Mechanized Potato Harvesting Operation Modes
Potatoes can be categorized into early-maturing varieties, mid-maturing varieties, and late-maturing varieties according to their harvest period [20,21]; additionally, the categories of cultivation forms include flat cultivation, ridge cultivation, and intercropping between ridges [22]. The typical row spacing for flat cultivation is 30–50 cm; for ridge cultivation, it is 60–85 cm for a single ridge and single row or for a single ridge and double rows; finally, the typical row spacing for intercropping between ridges is 50–100 cm. The purpose of studying these operation modes for mechanized potato harvesting is to complete the potato harvesting operation efficiently and with low losses. At present, the main modes of mechanized potato harvesting operations are segmented harvesting and combined harvesting.
2.1. Potato Harvesting Operation Mode
Segmented potato harvesting is divided into seedling top-killing, digging, and gleaning. The segmented harvester first turns up the potato–soil mixture using digging shovels, removes the soil and impurities using a separation device (e.g., a vibrating sieve or roller), and then sends the potatoes to the grading section by means of a conveyor device, where they are sorted for collection according to their size or quality. Some models also incorporate digger–shovel vibration technology to further reduce soil adhesion. As shown in Figure 1, there are generally two stages of separation for potato–soil separation. The first stage has a high soil content and a large amplitude during operation in order to increase the potato–soil separation effect; the second stage has a low soil content and a small amplitude during operation in order to reduce damage to the potato tubers [19].
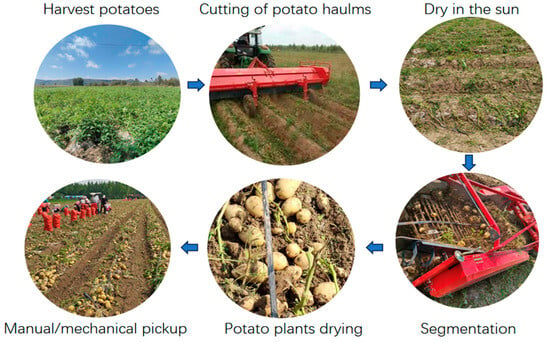
Figure 1.
Potato harvesting operation mode.
2.2. Potato Combine Harvester Operation Mode
Combined harvesting means that, after the seedlings are top-killed, the entire process of potato digging, potato–soil separation, potato and offal separation, potato tuber grading, and ton bag packaging is completed at the same time using harvesting equipment. Between 4 and 11 days after the seedlings are top-killed, the operating mode of the combine harvester is as follows: automatic row alignment, depth limitation, digging and transportation, potato and soil separation, potato and debris separation, manually assisted separation, and packaging in ton bags. The combine harvester is equipped with an automatic row alignment device, a depth-limiting soil-crushing device, a digging device, a separation device, a sorting device, a ton bag device, etc. Combined harvesting requires potatoes to be collected and transported at the same time, which places high demands on the soil-crushing function of the separation device. Soil blocks that are difficult to separate are separated with manual assistance [23]. Taking a self-propelled crawler potato combine harvester as an example, the combined harvesting operation mode is shown in Figure 2.
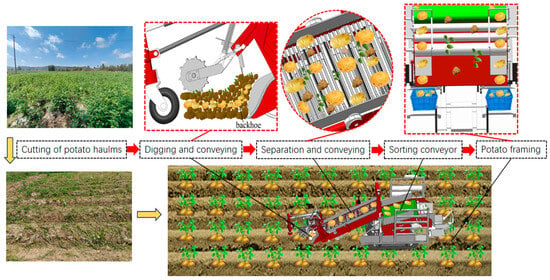
Figure 2.
Potato combine harvester operation mode.
3. Key Technologies for Mechanized Potato Harvesting
Based on the potato harvesting operation patterns, specifically during the processes of digging up potato tubers, separating potatoes from the soil, separating potatoes and debris, and packing potatoes into ton bags, the shape and design of the digging shovel and the digging depth will affect the harvester’s potato collection rate and loss rate [24]. The parameters and designs of the separation, potato collection, and conveying devices will affect the harvester’s potato damage rate, potato skin breakage rate, and debris content [25,26]. When designing the parameters of the harvester, excessive collisions between, squeezing of, and friction between potatoes should be avoided. The application of intelligent technology has improved the quality of potato harvesting, promoted the development of potato-harvesting equipment, and solved the bottleneck problem of potato harvesters. The technical features of potato harvester equipment in China and abroad are summarized as follows: potato seedling top-killing technology, digging technology, automatic row-depth-limiting technology, separation technology, ton-bag-sorting technology, and intelligent technology [27,28].
3.1. Potato Haulms Removal Technology
Before digging up potatoes, the harvester needs to top-kill the seedlings in advance in order to reduce the moisture content of the soil between the ridges, reduce the amount of soil attached to the potatoes, reduce the spread of pests and diseases, and regulate the soil environment. Premature seedling top-killing can help lignify the potato skin, increase the hardness of the potato surface, and reduce damage to the potato skin caused by collisions and friction [29]. Secondly, top-killing the seedlings in advance can prevent the seedlings and weeds from being entangled in the harvester. There are three ways to top-kill potato seedlings: manual cutting, chemical cutting, and mechanical cutting. Because manual cutting is inefficient and chemical cutting is harmful, mechanical cutting is usually used. Mechanical seedling cutting can be categorized as either segmented seedling cutting or combined seedling cutting. Segmented seedling cutting is performed by pulling a tractor equipped with seedling-cutting equipment through a field before harvesting. Combined seedling cutting is carried out by a harvester with a seedling-cutting device attached at its front end, which top-kills the seedlings and digs up the potatoes at the same time. It is not suitable for areas with a lot of seedlings and a high moisture content [30,31].
European and American countries have conducted extensive research on potato seedling top-killing equipment, and the technology used in those countries is advanced; for example, 6LKB-550, 4LKB-310, and 2LKB-190 are produced by APH in Bunnik, The Netherlands, and HT-400, HT-200, KS3600, and other potato seedling top-killing machines are produced by GRIMME in Damme, Germany. These machines top-kill the seedlings cleanly and have high operating efficiencies. The Rafale series potato seedling top-killing machines produced by the Belgian company AVR operate stably and can automatically adjust the top-killing depth. Regarding potato ridge-cutting machinery, the technical characteristics and functions of domestic potato ridge-cutting machinery and of machinery used abroad are relatively similar. The corresponding number of blades and seedling-throwing patterns are designed according to the row spacing and number of rows [32]. The length of the blade and the speed of the support shaft are designed according to the characteristics of the ridge shape and the length of the seedlings in order to ensure the smooth operation and efficiency of the seedling-cutting machine [33].
Research on potato seedling top-killing equipment in China started relatively late, but, in recent years, through independent research and development, the technical gap with other countries has gradually narrowed [34]. Lv Jinqing et al. [35] designed a new type of potato seedling top-killing machine, pioneered the use of a fluttering knife arrangement, and optimized the operating parameters of the seedling-cutting machine in order to meet its operation index requirements. To improve the operational efficiency of potato seedling-cutting machinery, Peng Manman [36] designed a four-row potato seedling-cutting machine with an effective seedling-cutting mechanism, thereby providing a solution to the problem. Domestic agricultural machinery enterprises have also tried to meet the needs of the industry through research and development of a number of potato seedling-cutting machines, such as Xisen Tiancheng’s research and development of the 4JM-180 and 4JM360B potato seedling-cutting machines; Qingdao Hongzhu’s research on and development of the 1JH-360 potato seedling-cutting machine; and MENOW’s production of the 1084 potato seedling-cutting machine. Potato seedling-cutting machines from China and from abroad, specifically their representative models, specific parameters, and characteristics, are shown in Table 1.

Table 1.
Representative models and specific parameters of potato seedling-cutting machines.
In general, most seedling-cutting machines feature a rear-hung design, which facilitates their compatibility with tractors. Some seedling-cutting machines are of a combined type, allowing them to perform seedling-cutting, crushing, and spreading operations at the same time. Regarding power, a single-row seedling-cutting machine typically requires between 20 and 50 horsepower, while a multi-row seedling-cutting machine generally demands between 50 and 100 horsepower. To reduce energy consumption and enhance the effectiveness of seedling top-killing, these machines commonly employ a rear suspension design, and the material of the swinging blade is typically 65 Mn steel or high-speed steel. Compared to international standards, China’s potato seedling-cutting machines exhibit deficiencies in the material of the swinging blade, overall machine stability, control technology, and operational efficiency. Swinging blades used in other countries are predominantly made of high-speed steel or special alloy steel, which leads to a longer service life. In contrast, the materials used for Chinese swing blades are of relatively inferior quality, resulting in a shorter lifespan. The overall design of foreign potato seedling-cutting machines is more advanced and offers greater stability than certain Chinese models of potato seedling-cutting machines, which face issues related to insufficient stability. Additionally, foreign potato seedling-cutting machines typically incorporate automatic ground height adjustment technology, whereas their Chinese counterparts still have limitations in this regard.
3.2. Potato-Digging Techniques
The function of the digging component is to scoop up the potatoes and soil and transfer them to the separating component. The digging device should dig up the potatoes with as little soil as possible attached to them to ensure that a suitable volume of potatoes is fed into the separator component [43]; additionally, the particular shovel used in sticky soil conditions should have a strong crushing ability to facilitate the separation of potatoes and sticky soil, as this is a more difficult process [44]. At the same time, the digging shovel should have a self-cleaning function to prevent grass entanglement and soil congestion during the operation of the digging device [45]. There are three types of digging shovels commonly used on potato harvesters, as follows: flat, vibratory, and hybrid bionic shovels.
3.2.1. Flat Excavator Shovel
The flat excavator shovel is rigidly connected to the frame, either directly or indirectly. It has a simple structure and is easy to manufacture. It is also often used on chain-lift excavators [46]. In order to ensure that the shovel can clean itself properly and demonstrates effective soil penetration, triangular shovels with beveled edges are widely used. These can be categorized, according to the number of shovels, into the following three types: single shovel, double shovel, and multiple shovels [47]. Flat excavator shovels are commonly used in potato harvesters, such as the EVO280, WH200, and other potato harvesters developed by GRIMME in Germany; the 4U-170, 4U-90, and other potato harvesters developed by Qingdao Hongzhu; the 4UZL-1 self-propelled potato combine harvester designed by the Nanjing Institute of Agricultural Mechanization of the Ministry of Agriculture and Rural Affairs; and the 4U-1400 potato combine harvester designed by Gansu Agricultural University.
Commonly used plane-type digging shovels are shown in Figure 3. The design of the plane-type excavation shovel enables it to have certain effects, including reducing the resistance found when trying to break up the soil and adjusting the angle of the excavation shovel in the soil according to different types of soil. The angle of the plane-type excavation shovel is generally between 20° and 35°, and its structure should include a front end processed into a sharp angular slanting edge, which can reduce the resistance to excavation and prevent the entanglement of weeds and congestion [48].
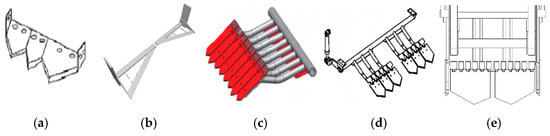
Figure 3.
Common flat digging shovels: (a) triangular digging shovel; (b) strip symmetrical shovel; (c) separate anti-blocking shovel; (d) stone fence combination shovel; (e) stone fence two-piece shovel.
3.2.2. Vibratory Digging Shovel
Vibratory digging shovels, in addition to moving forward as the harvester does, simultaneously utilize the harvester’s power to drive a reciprocating motion [49]. There are two main types, namely, slant-blade-slotted shovels and flat-blade-slotted shovels, and their working process includes two stages, namely, cutting soil and conveying soil [50]. Vibratory digging shovels help with conveying potatoes to the separation component; they perform significantly less crushing of clods but increase the cutting of the clods [51], smoothly breaking up the clods and facilitating potato–soil separation [52]. The vibration of the vibratory digging shovel reduces the average traction resistance of the harvester, but it does not reduce the total power required [53]. Less research has been carried out on this type of potato harvester shovel in foreign countries, as they are mostly used on large potato combine harvesters. The Italian company Spedo, seeking a solution for difficulties harvesting potatoes in hilly mountainous regions, designed the Model-CPP-M potato harvester, with a simple structural design; it attaches to the back of a tractor during mountainous harvesting operations.
China’s terrain is complex, its geological types are diverse, and operating conditions are variable; therefore, there have been many studies conducted on vibratory digging shovels. For example, Lv Jinqing et al. [54] designed a 4U1Z-type vibrating potato shovel for complex cultivation conditions; Chen Kai et al. [55] designed a vibrating shovel potato harvester with a good digging effect; and Liu Xiao et al. [56] designed a vibrating potato-digging device in order to solve the problems of high digging resistance and high energy consumption, using a combination of a four-bar mechanism and concentric wheels, to achieve both horizontal and vertical vibration. These vibratory potato shovels are mainly used on small plots, terraces, slopes, and other terrains. Representative models of vibratory excavating shovels are shown in Figure 4.
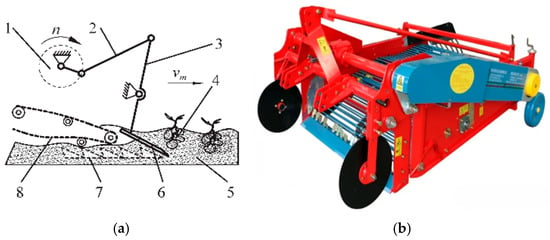
Figure 4.
Vibratory excavator shovel—structural principle diagram and actual picture. (a) Structural schematic diagram: 1. eccentric bearing; 2. connecting rod; 3. reciprocating shovel frame; 4. potato; 5. ridge body; 6. digging shovel; 7. excavator shovel movement trajectory; 8. elevator chain. (b) Actual picture.
3.2.3. Hybrid Bionic Digging Shovel
Hybrid bionic digging shovels usually consist of different types of digging components in different configurations, with the objective of the design being to reduce the resistance of the digging shovel and reduce damage to the potatoes; the shape and size of the shovel are also designed to make them suitable for complex soil areas [57]. The resistance of the digging shovel is related to the adhesion characteristics of the soil, and the level of soil content attached to the digging shovel varies depending on the type and moisture content of the soil [58].
Many scholars design the shape of excavation shovels based on the shapes and patterns of plants and animals that exhibit low levels of soil adhesion in nature [59]. Li Junwei et al. [28,60] designed a bionic longitudinal-wave shovel based on the corrugated structure found on the surfaces of earthworms and the special structure found on the flaps of scallops; Li Xiaopeng et al. [61] designed a bionic potato-digging shovel with double bionic surfaces based on the excellent digging ability of mole crickets; Fan Yu et al. [62] designed a bionic digging shovel based on the unique characteristics of wild boars’ snouts, which allow them to arch in the soil, specifically in terms of their external morphology; Bao Jianlun et al. [63] designed a low-resistance bionic digging shovel with rabbit incisors as the bionic prototype; and YU et al. [64] utilized a low-resistance characteristic bionic shovel to design a curved digging shovel. These shovels are designed to reduce the energy consumption of harvesting machines and to reduce resistance within the digging process. The parameter characteristics are shown in Table 2.
Table 2.
Typical bionic shovel examples and parameter characteristics.
Comparing the above three kinds of digging shovels, the plane-type digging shovel has a simple structure, is convenient to operate, causes less damage to the soil, and is suitable for soil conservation tillage, but it has poor adaptability and is not suitable for hard soil or soil with more stones. The vibratory digging shovel has strong adaptability and can be used for a variety of soil types, but it has a complex structure and causes greater damage to the soil, which may not be conducive to soil conservation. Finally, the hybrid bionic digging shovel has low energy consumption and high efficiency, but it has a complex structure and high design and maintenance costs. Therefore, when designing digging shovels, suitable types of digging shovels should be selected according to soil types, crop planting patterns, and root depths, and digging shovels with high strength and good abrasion resistance should be selected in soils with hard soil or many stones.
3.3. Potato Depth-Limiting Technology
The excavation depth limit is divided into the ridge-top depth limit, the ridge-side depth limit, and the ridge-bottom depth limit. The ridge-top depth limit accurately controls the excavation depth, thereby avoiding damage to the crop roots. It is suitable for crops planted on the ridge top and is conducive to maintaining the ridge shape, but it has strict requirements for the ridge shape. When the ridge surface is uneven, it will affect the depth limit effect. The ridge-side depth limit can better maintain the ridge shape and reduce soil disturbance. It is suitable for ridge planting, especially when the ridge sides are relatively flat. The ridge-bottom depth limit is simple and easy and does not require complicated adjustments. It is suitable for soil conditions with relatively flat ridge bottoms, but it cannot accurately control the excavation depth; therefore, it is easy to damage the crop roots.
Depth-limiting technology for potato harvesting includes counter-row technology and digging-depth-limiting technology [65]. Counter-row technology refers to the arrangement of traction devices or counter-row wheels on both sides of the rows to guide the harvester along the potato rows before the harvester digs, as shown in Figure 5a. The depth of the harvester’s digging should be controlled appropriately [66]; if the depth is too deep, the digging volume increases, the load of the separation component increases, and the power consumption increases dramatically [67]. On the other hand, if the depth is too shallow, the potato damage rate rises, and the harvest’s quality is reduced [68]. Foreign depth-limiting technology is more advanced than that in China; for example, the German company GRIMME has TerraControl depth control technology, as shown in Figure 5b, which uses automatic monopoly depressurization and scans field mounds to automatically control the digging depth. Domestic Chinese depth-limiting technology has also made some progress; for example, Wei Zhongcai et al. used depth-limiting technology combined with electromechanical hydraulic control technology to achieve automatic depth limiting on an undulating and uneven surface containing potato mounds [65].

Figure 5.
(a) Row-to-row technology; (b) TerraControl depth control technology.
Agricultural machinery enterprises have driven research into depth-limiting technology; for example, the German company GRIMME developed the EVO series and the WH200 series, MENU developed the 1600 series and the 1700 series, Xisen Tiancheng developed the 4UX-165 series, Qingdao Hongzhu developed the 4U-90 series, etc. The design of the front-end depth-limiting devices of these machines is relatively compact, mainly consisting of a seedling-cutting disk, a grass pressure wheel, and an imitation monopoly-shaped depth-limiting roller. As shown in Figure 6, the components combine with each other to achieve the functions of weeding and depth limiting during operation [69].
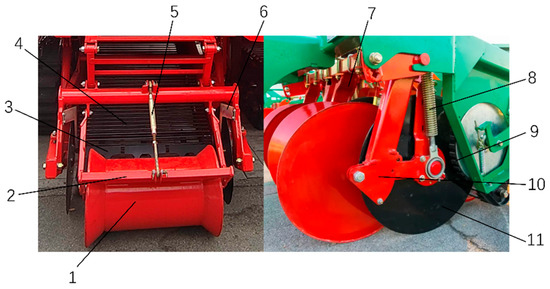
Figure 6.
Harvester depth limit and anti-blocking diagram. 1. Imitation monopoly-shaped depth-limiting wheel; 2. self-cleaning device for depth-limiting wheel; 3. excavating shovel; 4. lifting chain; 5. depth-limiting wheel spring mechanism; 6. self-cleaning device for potato-cutting disk; 7. depth-limiting wheel lifting frame; 8. cutting disk spring device; 9. grass pressure wheel; 10. potato-cutting tray; 11. cutting tray holder.
Domestic Chinese potato harvesters have mostly adopted mechanical depth limiting, although they also support the flexible adjustment of the inclination angle of the separation sieve and the depth of the digging shovel; however, overall, manual or semi-automatic adjustment still dominates. Some high-end models have begun to introduce hydraulic depth-limiting technology, but the popularization rate for these is low. On the other hand, high-end models have generally adopted hydraulic depth-limiting and automatic depth-limiting technology, and some models also combine GPS and terrain-sensing technology to realize intelligent depth limiting. Therefore, the depth-limiting accuracy of foreign models is significantly higher than that of domestic models, and the depth-limiting accuracy of domestic models is greatly affected by mechanical structure and terrain. In the future, China will need to break through low-loss depth control, agro-mechanical and agronomic integration, and other “bottleneck” technologies, learn from foreign real-time detection and adaptive chassis technology, optimize the depth-limiting algorithm for the needs of hilly and mountainous areas, improve the accuracy of depth-limiting technology, and adopt new levels of automation.
3.4. Potato Separation Technology
The separation device is positioned behind the digging shovel. The mixture entering the separation device from the digging shovel comprises potatoes, fine soil, clods of soil, stones, potato vines, and weeds. The separation device is tasked with separating this potato–soil mixture. The differing separation principles used can be broadly categorized into nine types, as illustrated in Table 3. To address the actual separation requirements of potato harvesters, bar elevators, vibrating separation screens, conveyor belts, and rubber finger separation screens are commonly employed. Separation technology is classified into segmented harvesting and separation technology, combined harvesting and separation technology, and impurity separation technology, based on the terrain selection for harvesting and the design of the machinery.
Table 3.
Types of separation technology.
3.4.1. Segmented Harvest Separation Technology
Segmented harvesting is mostly used for small- and medium-sized potato harvesters in hilly and mountainous areas, small plots, and other complex terrains, and it is less used for large potato harvesters [70]. The separation conveyor belt, which is attached to the segmented harvesting machine, generally has only 1–2 stages, the most widely used ones of which are a vibrating fence separating screen and a bar elevator. The general segmented harvesting conveyor belt is configured with bars, conveyor belts, vibrating wheels, driving wheels, roller chains, etc., and has a simple structure; it is drawn by a tractor during harvesting operations [71].
The application of segmented harvesting and separation technology abroad is mostly undertaken in large-scale field operations. The WR200 series and WH200 series potato harvesters developed by Germany’s GRIMME company utilize the aging- and abrasion-resistant characteristics of rubber belts and combine them with bars to form a separation and conveying device. Within this device, the first-stage separating screen uses a hydraulic drive device, the amplitude and frequency of the vibrating device can be adjusted steplessly, and the inclination angle of the two stages of the separating screen can be controlled by a hydraulic rod so as to achieve efficient and stable potato–soil separation.
The terrain of China is complex, with potato cultivation predominantly occurring in hilly and mountainous regions, terraced fields, and sloping lands, which necessitate a significant number of potato harvesters [72]. To address the challenges of inadequate potato–soil separation and low harvest quality in mountainous areas, Wei Zhongcai and colleagues developed various potato–soil separation technologies, including high-frequency low-amplitude vibration damage, wave-shaped loss reduction separation, and low-position laying. These technologies were applied to segmented potato harvesters to achieve low-loss and high-efficiency separation outcomes [65,73,74,75,76]. When exploring the mechanisms of potato separation damage, Feng Bin and his team combined bench collision tests with field tests and developed a small vibrating potato digger, as well as a lightweight potato digger [77,78,79,80]. Lü Jinqing and his colleagues examined the interaction between soil and separation bars, optimizing the design of the structural and operational parameters of the separation mechanism based on the collision or extrusion damage to potatoes caused by key parameters, such as the linear speed, the inclination angle, and the vibration frequency of the lifting chain [81,82,83,84,85,86]. Common loss reduction devices and materials are illustrated in Table 4. Domestic agricultural machinery companies have conducted extensive research and development of segmented harvesters, with representative models including the Xisen Tiancheng 4UX-165 and the Qingdao Hongzhu 4U-90.
Table 4.
Damage reduction devices and materials.
3.4.2. Combined Harvest Separation Technology
Combined harvesting and separation technology is applied to medium and large potato combine harvesters to complete potato–soil separation, impurity removal, transportation, and bagging processes in one go. The components of the combined harvester separation device are quite diverse, including horizontal conveying separation, inclined conveying separation, and vertical surrounding separation lifting. It generally includes three or more levels of conveying and separation screens. The first- and second-level separation parts are mainly used to separate most of the soil and impurities, while the third-level and subsequent separation parts are mainly used to complete the conveying, sorting, and grading of potato tubers [87,88].
The vibration mechanism is a key component of the combine harvester. The vibration frequency and amplitude directly affect the potato damage and skin breakage rates of the harvester. Currently, the vibration mechanism mostly uses a continuously variable speed drive system, which can steplessly adjust the frequency and amplitude to ensure separation is carried out while minimizing the damage caused to the potato tubers by the separation device [89]. Typical jitter wheels are shown in Table 5.
Table 5.
Characteristics of different vibrating wheel types.
In the conveyor belt portion following the three stages of the separating device, fine soil and most impurities have been screened off, and the remaining clods and larger impurities are separated by the separating conveyor belt at the back [90]. For example, the Keiler series harvester, developed by the German company ROPA, using a hedgehog screen combined with rubber rollers that is installed after the two-stage lifting conveyor chain, can effectively break the soil pieces and separate the potato seedlings; the Puma series harvester, developed by the Belgian company AVR, uses a hedgehog screen combined with rubber rollers, installed in the rear end of the harvester, which uses the different friction properties of potatoes, soil pieces, and impurities on the hedgehog screen to achieve a high level of separation.
3.5. Impurity Separation Technology
As shown in Figure 7, impurity separation technology is mainly composed of a screen-type lifting chain, a baffle, an articulated shaft, a smooth roller, a debris removal roller, etc. During operation, impurities are blocked by the blocking rod and separated from the gap between the smooth roller and the lifting chain.
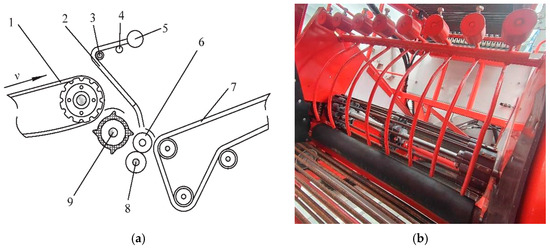
Figure 7.
Impurity separation technology diagram and photo thereof. (a) Sketch of impurity separation structure: 1. lifting chain; 2. retaining rod; 3. articulating shaft; 4. limit rod; 5. gravity ball; 6. light roller Ι; 7. rear lift chain; 8. light roller Π; 9. debris removal rollers. (b) Photo of impurity separation technology.
In the middle conveyor–separation section of a large combine harvester, a de-vegetation device is present; this is designed by adopting roller-staggered de-vegetation technology, as shown in Figure 8. The roller-staggered de-vegetation device mainly consists of light rollers and threaded de-vegetation rollers, and the threaded de-vegetation rollers are wrapped with flexible materials, which cause little damage to the potatoes. When the potato–soil mixture passes through, the potatoes will pass through normally, while the potato seedlings and weeds will become entangled in the threaded de-vegetation roller and separated. The representative models are the T series and QM series harvesters developed by Standen (UK) and the Windrower series harvesters developed by Scan Stone.
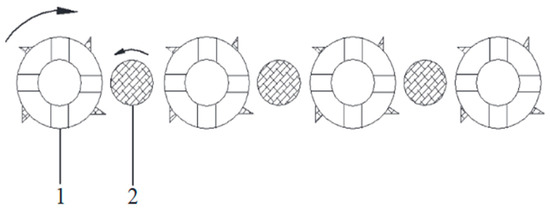
Figure 8.
Roller-staggered seedling removal structure: 1. threaded rollers; 2. light rollers.
In general, potato–impurity separation technologies include vibration screening, air flow separation, mechanical separation, and intelligent identification. Air flow separation relies on a fan generating air flow to blow away light impurities, such as small pieces of soil, residual leaves, etc. Mechanical separation uses the differences in physical properties between potatoes and impurities to separate them. Intelligent identification uses machine vision, sensors, and other technologies to identify and distinguish potatoes and impurities. In terms of impurity separation technology, the major potato-producing countries, such as those in Europe, as well as the United States, have a high level of technical maturity. For example, Germany’s Grimm VARITRON-470 self-propelled and fully automatic potato harvester is equipped with a two-stage screen and multiple sets of impurity removers, ensuring that its impurity removal process is stable and reliable.
3.6. Potato-Sorting Tonnage Technology
With combine harvesters, manual sorting tables are often utilized to further remove debris from the harvest. The common manually assisted sorting table comprises a conveyor belt with workers standing on both sides of it and manually separating the potatoes, soil, and impurities, which are then transported in different directions, as shown in Figure 9. The conveyor belt used for manually assisted sorting is usually configured horizontally, but the vertical inclination can be increased by 5–8° in order to transport the potatoes to a certain height.
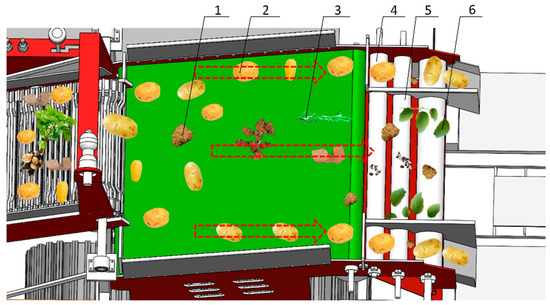
Figure 9.
Manual sorting chart: 1. dirt clods; 2. potatoes; 3. weeds; 4. soil mixture channel; 5. potato channel; 6. potato seedlings.
After sorting the impurities, the potatoes need to be ton-bagged. The potatoes usually have to fall from a height into the ton bags, specifically from the end of the sorting table to the bottom of the ton bag. This height difference will cause fall damage to the potatoes; in order to reduce this [91], many agricultural machinery enterprises and research institutes have conducted research on ton bagging and potato collection technology. Harvesters such as the Belgian AVR Puma series and the Dewulf-R3060, Germany’s GRIMMEVARITRON series, etc., adjust the fall height by regulating the height of the potato box so as to minimize the fall damage to potatoes. Harvesters such as CIMMEVARITRON 1710B, DoubleL7340, Standen-T, 4ULZ-170, GRIMMEGT series, etc., control the falling height of potatoes by installing lifting arms. Wei Zhongcai et al. designed a bale-loading and -unloading potato harvester, which can automatically switch between caching and bale-loading states to achieve better loss reduction [74,92], as shown in Figure 10.
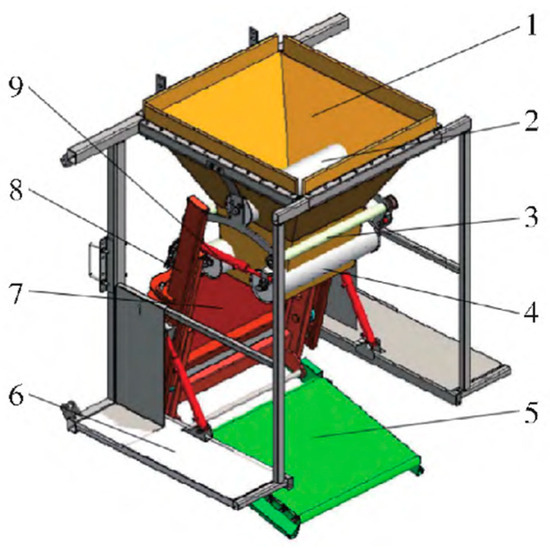
Figure 10.
Potato harvester end-of-ton package unit: 1. cache hopper; 2. buffer rollers; 3. floating arm; 4. limit rollers; 5. bale loading and unloading slide; 6. pedal; 7. seedling stopper; 8. bracket outer guide rail; 9. hydraulic cylinder.
3.7. Intelligent Harvesting Technology
Intelligent harvesting technology refers collectively to the sensor technology, machine vision technology, satellite navigation and positioning technology, and automatic control technology utilized in potato harvesters [93,94,95]. Through precise control and advanced technology, it improves the harvesting efficiency of potato harvesters; reduces the potato damage rate, potato skin-breaking rate, miscellaneous rate, and loss rate during the potato-harvesting process; and improves the economic efficiency of potato harvesters [96,97,98]. The development of domestic Chinese intelligent potato-harvesting technology is still in its initial stage, whereas European and American countries’ potato harvesters use more intelligent technology. The intelligent technologies currently in use are shown in Table 6.
Table 6.
Intelligent harvesting technologies.
4. Mechanized Potato-Harvesting Equipment
4.1. Small- and Medium-Sized Potato-Harvesting Equipment
Small- and medium-sized potato-harvesting equipment is mostly used in hilly and mountainous areas, terraced fields, and small plots, which can solve the problems of a small operating space and a small turning radius in narrow terrain [107,108,109]. The typical mass of small- or medium-sized segmented and combined harvesting equipment is less than 5000 kg. In China and abroad, many agricultural machinery enterprises and research institutes have conducted research on and enabled the development of small- and medium-sized potato-harvesting equipment in order to solve the problems that arise in hilly and mountainous areas, small plots, and other narrow terrains. The common types of small- and medium-sized potato-harvesting equipment are categorized as segmented harvesting equipment and joint harvesting equipment.
4.1.1. Small- and Medium-Sized Segmented Harvesting Equipment
Small- and medium-sized potato-harvesting equipment is highly flexible and can coordinate its operation according to the terrain to achieve the required harvesting effect. Common small- and medium-sized segmented potato-harvesting equipment is shown in Table 7.
Table 7.
Small- and medium-sized segmented harvesting equipment.
Research on small- and medium-sized potato harvesters is extensive, and there is a rich variety of equipment available. However, the majority of these harvesters adopt the two-stage separation sieve collocation method to separate potatoes and soil. Harvesting operations are carried out using tractor traction, with a simple structural design, which can be adapted to a variety of complex ground conditions. However, small- and medium-sized potato harvesters have a low level of intelligence, and it is difficult to adjust the working parameters to the real-time potato damage rate. The subsequent labor cost is also large.
4.1.2. Small- and Medium-Sized Combined Harvesting Equipment
In order to save costs during the potato-harvesting process and improve the quality of mechanical potato harvesting, many agricultural machinery enterprises and research institutes developed small- and medium-sized potato combine harvesters, the common types of which are shown in Table 8.
Table 8.
Small- and medium-sized combine harvesting equipment.
Small- and medium-sized potato combine harvesting equipment has a high harvesting efficiency, can complete multiple potato-harvesting processes at the same time, and has a lightweight structural design. There are many improvements within the digging shovels, conveying and separating devices, and artificial sorting devices used, but the degree of intelligence of small- and medium-sized potato combine harvesters is still low.
4.2. Large Potato-Harvesting Equipment
Large potato-harvesting equipment is mostly used on plains, large plots, and other areas, as it has a large machine size, with a mass higher than 5000 kg, and a high harvesting efficiency. Depending on its structure, large potato-harvesting equipment can be categorized as either traction or self-propelled. The functions of large potato harvesters have been fully realized; they can simultaneously perform depth limiting, digging, separation, decontamination, grading, packaging into ton bags, and other processes. Both domestic and foreign large potato-harvesting equipment has undergone progress in research and development; the main types of large potato-harvesting equipment are shown in Table 9.
Table 9.
Large potato-harvesting equipment.
Large potato harvesters have a high harvesting efficiency and a large working area. They work well in complex and changeable operating conditions, as they have automatic control systems and fault detection systems that enable the adjustment of the harvester’s working parameters in real time based on the ground conditions. This enables the achievement of a low potato injury rate, a low potato skin breakage rate, and low loss. Additionally, large potato harvesters are equipped with a large-capacity storage hopper, which can save harvesting time by negating the need to change the bag.
4.3. Characteristics of Potato-Harvesting Equipment at Home and Abroad
By analyzing and summarizing the applications of domestic and foreign potato-harvesting equipment and technology, we can compare Chinese potato-harvesting equipment to equipment used in Europe, the United States, Japan, South Korea, and other developed countries to identify the following shortcomings:
- (1)
- The application rate of domestic Chinese large-scale potato-harvesting equipment is low. Europe, the United States, and other developed countries have fully achieved entirely mechanized potato harvesting in both large fields and small plots, as well as other varied terrains. In Japan, South Korea, and other countries that are characterized by hilly and mountainous areas with a lack of plains, their research into and use of small- and medium-sized potato-harvesting equipment has led to a high mechanization utilization rate and an advanced level of intelligence technology used. Due to the terrain and unique planting pattern restrictions in China, the application rate of large potato-harvesting equipment is low; simple structures with a low level of intelligence, i.e., small- and medium-sized potato-harvesting equipment, are more commonly used.
- (2)
- Creating new key harvesting technologies is difficult, and the equipment has a short service life. There has been much domestic Chinese research conducted on key potato-harvesting technology, but less research has been carried out on intelligent potato digging and transportation, low-loss flexible separation, efficient and clean sorting, and other innovative research. The output results are insufficient, and the adaptability to different terrains and soil environments is poor. The manufacturing processes for commonly used equipment, such as digging shovels, seedling-cutting disks, elevating and transporting separation screens, conveying and sorting belts, and other materials, should be improved, and these components should be characterized by wear resistance, a high level of toughness, and low clay resistance to improve their service life.
- (3)
- In China, the degree of technology integration is insufficient, and the utilization rate of intelligent technology is low. Foreign joint harvesting equipment, digging devices, and separating and conveying equipment are applicable to different planting modes, and the potato collection device parameters can be adjusted in real time, which greatly improves the utilization rate of the equipment. Domestic potato-harvesting equipment more often follows a purely mechanical design, meaning that fewer adjustments can be made via adaptive control equipment to the limit depth, conveying speed, vibration frequency amplitude, and other key parameters; this equipment relies on the manual adjustment of these parameters.
4.4. Comparative Economic Efficiency of Potato-Harvesting Equipment
The economic efficiency of potato-harvesting equipment is affected by a number of factors, including the type of technology used, its operational efficiency, energy consumption, labor costs, equipment maintenance costs, and so on. Table 10 shows comparative data on and analysis of the economic benefits of several common types of potato-harvesting equipment.
Table 10.
Comparative economic data of types of potato-harvesting equipment.
As can be seen in Table 10, manual or semi-mechanized harvesting is more economical, with less investment in equipment required, albeit with a lower efficiency. Fully mechanized harvesting has significant economic benefits, and equipment investments can be recouped through its high efficiency and high yield. Intelligent harvesting technology has optimal long-term economic benefits despite the high initial investment required and is suitable for ultra-large-scale cultivation and modern agricultural models.
5. Summary and Development Recommendations
5.1. Problems with Mechanized Potato Harvesting
In recent years, in order to solve the lack of potato-harvesting equipment, many innovations and achievements have been made within the field of potato-harvesting research due to continuous breakthroughs made by domestic agricultural machinery enterprises, research institutes, and institutions of higher learning. However, as the domestic land conditions are variable and planting modes are diverse, the penetration rate of mechanized potato harvesting still exhibits a considerable gap when compared to European and American countries [129,130]. By exploring the current situation of potato-harvesting equipment research in China and abroad, the development of mechanized potato harvesting faces the following problems:
- (1)
- The development of mechanization is unbalanced, with great regional differences. China’s potato-planting area is vast and covers plains, mountains, terraces, and so on. In areas with plains, the uptake of potato-harvesting equipment is higher, including segmented potato harvesters and various other types of potato combine harvesters [9]. In hilly and mountainous areas, areas with terraces, and other complex terrains, flat crops, ridge crop intercropping, and other planting modes are common, making mechanized harvesting more difficult; for example, in the Yunnan–Guizhou Plateau potato-planting zone, the mechanized harvesting rate is less than 5%. In Qinghai, Inner Mongolia, Gansu, and other places where the soil moisture content varies greatly, there are more planting areas with slate and slopes; using mechanized harvesting in these areas requires changing the working parameters of the equipment more often and thereby reducing the harvester’s efficiency. At the same time, it is difficult to take into account the rate of potato loss, the skin-breaking rate, and the rate of impurities. Compared with the plains, the inability to provide high-quality potato harvesters in these areas is a major bottleneck problem faced at this stage.
- (2)
- High-quality potato–soil separation and potato–impurity separation is difficult, and there is a lack of high-efficiency and low-loss separation devices. High-quality harvesting, namely, mechanized potato harvesting, has been used to solve this core problem; the potato mechanical damage is low, the soil content on the surfaces of the harvested potatoes is lower, and the harvesting equipment recycling rate is high. There is not a large difference in potato harvest quality between automatically and manually sorted potatoes, and automatic harvesting often has a more flexible clean-up. In many major production areas, in order to improve the potato yield and to ensure weed prevention, mulch planting is used, which requires potato-harvesting equipment. Mechanical harvesting has a good potato–impurity separation function, whereas, when using most of the current harvesting equipment, it is difficult to separate residual impurities, prompting the potato harvester to harvest a high rate of impurities.
- (3)
- The harvesting of fresh potatoes accounts for a large proportion of the total yield, which is difficult to achieve using mechanical harvesting. There are two main uses for potatoes after harvesting; some are used as starch potatoes, which are sent to factories for processing and selling, but their rate of return is low. Others are used as fresh potatoes, which are sold in vegetable wholesale markets, supermarkets, and so on; their rate of return is high. Many merchants and farmers naturally favor fresh potatoes and choose fresh potatoes for both planting and selling, so fresh potatoes have in the past accounted for more than 65% of the domestic potato harvest [131,132]. Fresh potatoes should be high-quality, and the surface layers of these potatoes need to be completely lignified during the harvesting period to prevent surface or internal damage caused by the mechanical harvesting process.
- (4)
- There are many bottleneck technologies and few high-quality harvesting machines. The manufacturing process for domestic potato-harvesting machinery is rough, and the application rate of special flexible materials is low, among other problems. The main reason for this is that domestic high-precision processing equipment is insufficient and that special flexible materials incur high costs. The existing processing equipment in small factories is not able to meet the precision requirements of high-quality potato-harvesting equipment, and they find it difficult to bear the huge cost of selecting special high-quality materials. Secondly, many aspects of harvesting technology research are currently insufficient, including harvesting bottleneck technology, intelligent technology, digging and conveying device technology, the development of automatic depth regulation technology, low-loss and high-efficiency potato–soil separation technology, adaptive regulation technology, machine identification application technology, and human–machine interaction technology.
5.2. Recommendations for Mechanized Potato Harvesting
The development of mechanized potato-harvesting equipment and new key harvesting technologies is garnering increased attention, and this will continue in the future. Future research directions and developments in these areas are set out below:
- (1)
- We should harmonize unbalanced development regions and develop multiple models collaboratively. Potatoes are planted in the main production areas in plain and hilly mountainous areas. The utilization rate of potato-harvesting equipment models in plain areas can be introduced to hilly mountainous areas and improved. For hilly and mountainous areas, small plots, and other terrains, users can pick from a variety of models according to their needs, including potato diggers, pickers, and small self-propelled potato harvesters; these models can provide minimum potato damage and high harvesting efficiency.
- (2)
- The research and development of high-quality harvesting and separation equipment should be increased. High-quality potato soil separation and potato–impurity separation are the core problems that potato-harvesting equipment research needs to solve. At the same time, potato soil–separation devices and potato–impurity separation devices affect the potato damage rate, broken skin rate, and impurity rate of the direct parts. From a mechanical design perspective, adding buffer damage reduction devices, flexible low-loss materials, and adaptive control systems are research directions for potato-harvesting and separation equipment. When adding key devices, low-loss-material selection is an important way to meet potato-harvesting objectives. In medium- and large-scale harvesting equipment, the separation equipment should offer automatic cleaning, overload protection, parameter adjustment, real-time matching of rotational speed, and other key functions for in-depth research.
- (3)
- Intelligent technology needs to be integrated in order to solve the bottleneck problem. The structural innovations of existing equipment make it difficult to solve the practical problems faced in potato harvesting. Machine vision and other technologies should be used to identify the differences between potatoes, soil, and impurities; intelligent control systems and the precise control of the separation device should be used to achieve the efficient separation of potatoes; sensors should be installed to monitor the number of potatoes conveyed and the conveyor belt speed; and an intelligent control system should be used to automatically adjust the speed of the conveyor belt in order to avoid the accumulation of potatoes or clogging. In the future, the focus should be on integrating soil sensors, crop sensors, position sensors, and other information using a central control system for the real-time intelligent regulation of digging depth, separation parameters, conveying speed, and other operating parameters so that the harvester can be automatically adjusted to the optimal state of operation, in accordance with the different soil conditions and crop growth, thereby improving the quality and efficiency of the operation.
- (4)
- The government should optimize industrial infrastructure and strengthen quality supervision. The government should also help to solve the current problems with the manufacturing processes of potato-harvesting machinery by providing a number of subsidies to support important production enterprises in updating these processes. At the same time, the government should encourage research institutes and agricultural enterprises to join forces and to combine innovative theories and production practices to enhance the driving force of innovation. In addition, the government should improve the social service systems for agricultural machinery and promote potato-harvesting equipment diversification reform.
Author Contributions
Conceptualization, B.W. (Bing Wang), F.G. and F.W.; methodology, B.W. (Bing Wang) and F.W.; software, C.L.; validation, M.C. and H.Y.; formal analysis, B.W. (Bing Wang); investigation, M.C. and B.W. (Bokai Wang); resources, C.L.; data curation, C.L.; writing—original draft preparation, C.L.; writing—review and editing, C.L.; visualization, F.G.; supervision, F.W.; project administration, B.W. (Bing Wang); funding acquisition, L.S. All authors have read and agreed to the published version of the manuscript.
Funding
This project was funded by the China Postdoctoral Science Foundation (2024T170443), the China Postdoctoral Science Foundation (2023M731824), and the Nanjing Postdoctoral Outstanding Research Project.
Data Availability Statement
The data presented in this study are available from the corresponding author upon request. The data are not available to the public due to privacy protection.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Zhang, Z.G.; Li, Y.B.; Wang, H.Y.; Zhang, Z.D.; Liu, X.C. Progress of key technologies and equipment for mechanized potato harvesting. J. Yunnan Agric. Univ. Nat. Sci. 2021, 36, 1092–1103. [Google Scholar]
- Dou, Q.Q.; Sun, Y.G.; Sun, Y.T.; Shen, J.X.; Li, Q.L. Current status and development of potato harvesting machinery at home and abroad. Chin. J. Agric. Mech. Chem. 2019, 40, 206–210. [Google Scholar]
- Xu, N.; Zhang, H.L.; Zhang, R.H.; Xu, Y.K. Current situation and outlook of potato farming in China. China Potato 2021, 35, 81–96. [Google Scholar]
- Li, Y.; Wang, J.; Tang, J.Z.; Zhang, J.; Hu, Q.; Pan, Z.H.; Pan, X.B. Analysis of production characteristics, limiting factors and countermeasures in major potato producing areas in China. China Potato 2020, 34, 374–382. [Google Scholar]
- Almady, S.S.; Al-Hamed, S.A.; Marey, S.A.; Al-Sager, S.M.; Aboukarima, A.M. An Assessment of Some Mechanical Properties of Harvested Potato Tubers Cv. Spunta. Agronomy 2024, 14, 1116. [Google Scholar] [CrossRef]
- Pszczółkowski, P.; Barbaś, P.; Sawicka, B.; Krochmal-Marczak, B. Biological and Agrotechnical Aspects of Weed Control in the Cultivation of Early Potato Cultivars under Cover. Agriculture 2020, 10, 373. [Google Scholar] [CrossRef]
- Wang, H.C.; Zhao, W.Y.; Sun, W.; Zhang, H.; Liu, X.L.; Li, H. Research progress on mechanized potato harvesting technology and equipment. J. Agric. Eng. 2023, 39, 1–22. [Google Scholar]
- Wei, Z.C.; Li, X.Q.; Zhang, Y.F.; Li, H.W.; Sun, C.Z. Progress in research on mechanized potato production technology and equipment for the whole potato production process. Agric. Mech. Res. 2017, 39, 1–6. [Google Scholar]
- Li, Z.H.; Wen, X.Y.; Lv, J.Q.; Li, J.C.; Yi, S.J.; Qiao, D. Analysis and Prospect of the Progress of Research on Key Technologies and Equipment for Mechanization of Potato Planting. J. Agric. Mach. 2019, 50, 1–16. [Google Scholar]
- Wei, Z.C.; Wang, Y.W.; Su, G.L.; Zhang, X.G.; Wang, X.L.; Cheng, X.P.; Li, X.Q.; Jin, C.Q. Progress in potato mechanized harvesting and debris removal technology and equipment. J. Agric. Eng. 2024, 40, 1–13. [Google Scholar]
- Kayad, A.; Paraforos, D.S.; Marinello, F.; Fountas, S. Latest Advances in Sensor Applications in Agriculture. Agriculture 2020, 10, 362. [Google Scholar] [CrossRef]
- Li, G.; Zhou, S.; Deng, G.; Zheng, S.; He, F.; Cui, Z.; Dai, Y.; Li, L.; Yan, B.; Qin, S.; et al. Research Progress on Mechanization Technology and Equipment for Cassava Field Production. Agriculture 2024, 14, 1926. [Google Scholar] [CrossRef]
- Zhou, B.; Li, Y.; Zhang, C.; Cao, L.; Li, C.; Xie, S.; Niu, Q. Potato Planter and Planting Technology: A Review of Recent Developments. Agriculture 2022, 12, 1600. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhu, X.; Li, J.; Lyu, J.; Qi, Y.; Liu, J. Design and Test of an Arc-Shaped Tooth Press Device for Combined Soil Preparation Equipment for Growing Potatoes. Agriculture 2023, 13, 1193. [Google Scholar] [CrossRef]
- Wei, H.G.; Zhang, J.L.; Yang, X.P.; Huang, X.P.; Dai, L.X.; Sun, G.H.; Liu, X. Improved design and experiment of 4UFD-1400 potato combine harvester. Trans. Chin. Soc. Agric. Eng. 2014, 30, 12–17. [Google Scholar]
- Zhang, X.; Liu, J.; Zhang, C.; Zhao, Y.; Du, X. Design and Experimentation of Small Potato Harvester for Heavy Soil in Hilly and Mountainous Areas. Agronomy 2024, 14, 2131. [Google Scholar] [CrossRef]
- Yang, X.; Wu, Y.; Wang, L.; Liu, F.; Zhao, X.; Bai, H.; Dong, W.; Kong, X.; Hu, H.; Zhong, W.; et al. Design and Performance Test of 4UJ-180A Potato Picking and Bagging Machine. Agriculture 2024, 14, 454. [Google Scholar] [CrossRef]
- Xie, S.S.; Wang, C.G.; Deng, W.G.; Li, X.; Qi, S.H. Analysis on the mechanism of potato-soil separation and parameter optimization experiment of swing separation screen. Trans. Chin. Soc. Agric. Mach. 2017, 48, 156–164. [Google Scholar]
- Xie, S.S.; Wang, C.G.; Deng, W.G. Potato collision damage test and collision acceleration characterization. J. China Agric. Univ. 2020, 25, 163–169. [Google Scholar]
- Shen, H.Y.; Luo, W.W.; Wu, F.; Gu, F.W.; Yang, H.G.; Hu, Z.C. Research progress on equipment and technology of mechanized peanut harvesting. Trans. Chin. Soc. Agric. Mach. 2024, 55, 21–38. [Google Scholar]
- Shen, H.Y.; Wang, B.; Hu, L.L.; Wang, G.P.; Ji, L.L.; Shen, G.W.; Wu, T. Design of potato tuber transfer and conveying mechanism for 4UZL-1 sweet potato combine harvester. J. Agric. Eng. 2020, 36, 9–17. [Google Scholar]
- Li, Y.; Fan, J.; Hu, Z.; Luo, W.; Yang, H.; Shi, L.; Wu, F. Calibration of Discrete Element Model Parameters of Soil around Tubers during Potato Harvesting Period. Agriculture 2022, 12, 1475. [Google Scholar] [CrossRef]
- Li, Z.; Sun, W.; Wang, H.; Wang, J.; Simionescu, P.A. Study on the Process of Soil Clod Removal and Potato Damage in the Front Harvesting Device of Potato Combine Harvester. Agriculture 2024, 14, 1947. [Google Scholar] [CrossRef]
- Shen, H.Y.; Ji, L.L.; Hu, L.L.; Wang, B.; Wang, G.P.; Bao, G.C. Study on mechanical and physical properties parameters of sweet potato tubers during harvest period. Chin. J. Agric. Mech. 2020, 41, 55–61. [Google Scholar]
- Wei, Z.C.; Wang, Y.W.; Li, X.Q.; Wang, J.M.; Su, G.L.; Meng, P.C.; Han, M.; Jin, C.Q.; Li, Z.H. Design and test of flexible kneading potato combine harvester. J. Agric. Eng. 2023, 39, 60–69. [Google Scholar]
- Yang, R.B.; Tian, G.B.; Shang, S.Q.; Wang, B.J.; Zhang, J.; Zhai, Y.M. Design and experiment of roller-type potato-soil separation device for potato harvester. Trans. Chin. Soc. Agric. Mach. 2023, 54, 107–118. [Google Scholar]
- Zhang, Z.G.; Zhang, Z.D.; Li, G.N.; Wang, H.Y.; Li, Y.B.; Li, D.H. Detection of potato in complex environments using improved YoloV4 model. J. Agric. Eng. 2021, 37, 170–178. [Google Scholar]
- Li, J.; Li, X.; Hu, B.; Gu, T.; Wang, Z.; Wang, H. Analysis of the Resistance Reduction Mechanism of Potato Bionic Digging Shovels in Clay and Heavy Soil Conditions. Comput. Electron. Agric. 2023, 214, 108315. [Google Scholar]
- Zhao, Z.; Deng, W.; Hu, X.; Yu, H.; Li, Q. Investigation of Impact Contact Force Testing and Damage Analysis on Potatoes. Agriculture 2024, 14, 1740. [Google Scholar] [CrossRef]
- Xie, Q.; Song, M.; Wen, T.; Cao, W.; Zhu, Y.; Ni, J. A Hob-Type Smart Weeding Machine for Use in Wheat Fields: Towards a Low Power Consumption and High-Efficiency Design. Comput. Electron. Agric. 2024, 227, 109519. [Google Scholar]
- Wang, X.; Wang, Q.; Qiao, Y.; Zhang, X.; Lu, C.; Wang, C. Precision Weed Management for Straw-Mulched Maize Field: Advanced Weed Detection and Targeted Spraying Based on Enhanced YOLO V5s. Agriculture 2024, 14, 2134. [Google Scholar] [CrossRef]
- Lü, J.Q.; Yu, J.; Li, Z.Y. Design of key components of potato seedling killer. In Proceedings of the Potato Industry and Green Development, Yulin, China, 24 July 2021; Potato Committee of the Chinese Society of Crop Science: Beijing, China, 2021; p. 9. [Google Scholar]
- Zhu, X.X.; Lü, Y.N.; Yu, J.; Li, J.C. Design and experiment of potato stem and leaf chopping knife roller in full ridge. Trans. Chin. Soc. Agric. Mach. 2022, 53, 140–150. [Google Scholar]
- Feng, B.; Sun, W.; Wang, D.; Zhang, J.L.; Zhang, H.; Shi, L.R.; Wu, J.M. Design and experiment of potato vine seedling killer with flailing knife. Agric. Res. Arid Areas 2014, 32, 269–274. [Google Scholar]
- Lü, J.Q.; Shang, Q.Q.; Yang, Y.; Li, Z.H.; Li, J.C.; Liu, Z.Y. Design optimization and experiment of potato seedling killer. Trans. Chin. Soc. Agric. Mach. 2016, 47, 106–114+98. [Google Scholar]
- Peng, M.M.; Lv, J.Q.; Sun, H.; Yu, J.Y. Design of a four-row potato seedling cutting machine. Agric. Mech. Res. 2019, 2, 41. [Google Scholar]
- Kwinda, M.; Siebert, S.J.; Van Coller, H.; Masehela, T.S. Identifying Plant Functional Traits of Weeds in Fields Planted with Glyphosate-Tolerant Maize for Preferable Weed Management Practices. Agriculture 2024, 14, 223. [Google Scholar] [CrossRef]
- Jiao, J.; Hu, L.; Chen, G.; Chen, C.; Zang, Y. Development and Experimentation of Intra-Row Weeding Device for Organic Rice. Agriculture 2024, 14, 146. [Google Scholar] [CrossRef]
- Goyal, R.; Nath, A.; Niranjan, U. Weed Detection Using Deep Learning in Complex and Highly Occluded Potato Field Environment. Crop Prot. 2025, 187, 106948. [Google Scholar]
- Chen, P.; Xia, T.; Yang, G. A New Strategy for Weed Detection in Maize Fields. Eur. J. Agron. 2024, 159, 127289. [Google Scholar]
- Yang, R.; Zhai, Y.; Zhang, J.; Zhang, H.; Tian, G.; Zhang, J.; Huang, P.; Li, L. Potato Visual Navigation Line Detection Based on Deep Learning and Feature Midpoint Adaptation. Agriculture 2022, 12, 1363. [Google Scholar] [CrossRef]
- Goyal, R.; Nath, A.; Niranjan, U.; Sharda, R. Analyzing the Performance of Deep Convolutional Neural Network Models for Weed Identification in Potato Fields. Crop Prot. 2025, 188, 107035. [Google Scholar] [CrossRef]
- Ruysschaert, G.; Poesen, J.; Verstraeten, G.; Govers, G. Soil Losses Due to Mechanized Potato Harvesting. Soil Tillage Res. 2006, 86, 52–72. [Google Scholar] [CrossRef]
- Jia, J.X.; Zhang, D.X.; Sang, Y.Y.; Yang, X. Computer-aided analysis and simulation of potato digging shovel experimental study. J. Agric. Eng. 2006, 22, 106–110. [Google Scholar]
- Wang, Z.D.; Wang, S.S.; Zhu, P.Y.; Zhu, D.G. Research on key parameters of ginger rhizome excavation shovel based on discrete element method. J. Northwest Agric. For. Univ. Nat. Sci. Ed. 2025, 1–13. [Google Scholar] [CrossRef]
- Sun, W.; Wang, H.C.; Zhao, W.Y.; Zhang, H.; Liu, S.; Wu, J. Residual film recycling-type full-film soil-covered ridge-sown potato digger design and test. J. Agric. Mach. 2018, 49, 105–114. [Google Scholar]
- Zhou, J.; Cai, H.X.; Hu, G.R.; Chen, Y.; Chen, J. Design and testing of potato digging shovels based on monoculture two-row planting agronomy. Agric. Mech. Res. 2024, 46, 191–195. [Google Scholar]
- Han, L.; Liu, X.Z. Optimization design of digging shovel for potato harvester. Mech. Eng. 2023, 67–68+71. [Google Scholar]
- Wang, D.W.; Wang, J.S.; Shang, S.Q. Experimental study on vibration-based soil excavation resistance and energy consumption characteristics. J. Agric. Mach. 2020, 51, 267–272. [Google Scholar]
- Wu, T.; Huang, W.F.; Huang, J.B.; Liu, Q.T. Design and test of potato vibratory excavation test rig. Agric. Mech. Res. 2020, 42, 44–50. [Google Scholar]
- Liu, B.; Zhang, D.X.; Li, J. Design of MZPH-820 single-row potato harvester. Trans. Chin. Soc. Agric. Mach. 2009, 40, 81–86. [Google Scholar]
- Yang, H.G.; Yang, R.B.; Shang, S.Q.; Liu, Z.S.; Ni, Z.W. Design and experiment of vibrating digging potato harvester. China Agric. Sci. Technol. Rev. 2017, 19, 55–62. [Google Scholar]
- Jia, H.L.; Wang, W.P.; Chen, Z.; Zheng, T.Z.; Zhang, P.; Zhuang, J. Current Status and Prospects of Research on Optimization of Soil-Touching Components of Agricultural Machinery. J. Agric. Mach. 2017, 48, 1–13. [Google Scholar]
- Lv, J.Q.; Tian, Z.E.; Wu, J.E.; Yang, Y.; Shang, Q.Q.; Wang, Y.B.; Liu, Z.X. Design and test of a 4U1Z vibratory potato digger. J. Agric. Eng. 2015, 31, 39–47. [Google Scholar]
- Chen, K.; Gao, Y.Y.; Yang, L.Q.; Zhao, Y.Q. Design and simulation analysis of vibrating shovel potato harvester. Agric. Mech. Res. 2018, 40, 44–50. [Google Scholar]
- Liu, X.; He, B.T.; Duan, A.G.; Li, Y.P.; Qi, J.T.; Yu, F. Design of key components of vibratory potato digging device. Chin. J. Agric. Mech. Chem. 2020, 41, 6–12. [Google Scholar]
- Zhang, Y.; Qiao, C.X.; Wang, T.Q.; Cao, J.F.; Wang, P.F.; Shi, L. The mechanism of drag reduction in the three-dimensional geometric conformation of the claw toes of mole crickets (Gryllotalpa crickets) forefoot. J. Agric. Eng. 2021, 37, 309–315. [Google Scholar]
- Wang, S.W.; Li, S.J.; Zhang, Y.L.; Wan, Q.; Chen, H.; Meng, L. Mole Toe Bionics and Surface Heat Treatment to Improve Resistance Reduction and Wear Resistance of Toothed Trenching Knives. J. Agric. Eng. 2019, 35, 10–20. [Google Scholar]
- Zhang, Z.G.; Xue, H.T.; Wang, Y.C.; Jie, K.T.; Deng, Y.X. Design and experiment of a Sanqi bionic excavator shovel based on discrete element method. Trans. Chin. Soc. Agric. Mach. 2022, 53, 100–111. [Google Scholar]
- Li, J.W.; Gu, T.L.; Li, X.Y.; Wang, Z.J.; Hu, B.; Ma, Y.H. Bionic drag reduction characteristics of potato digging shovels under clay-heavy black soil conditions analyzed and tested. J. Agric. Eng. 2023, 39, 1–9. [Google Scholar]
- Li, X.P.; Liao, M.; Hu, B.; Pan, Q.L.; Tao, J.J. Potato bionic digging shovel blade and its drag reduction characteristics. Agric. Mech. Res. 2019, 41, 19–25+31. [Google Scholar]
- Fan, Y. Research on Potato Digging Mechanism and Bionic Shovel Design Based on Discrete Element Method. Ph.D. Thesis, Shenyang Agricultural University, Shenyang, China, 2020. [Google Scholar]
- Bao, J.L. Design and Test of Bionic Self-Sharpening Sharp Potato Digging Shovel. Master’s Thesis, Jilin University, Changchun, China, 2022. [Google Scholar]
- Yu, J.; Ma, Y.; Wang, S.; Xu, Z.; Liu, X.; Wang, H.; Qi, H.; Han, L.; Zhuang, J. 3D Finite Element Simulation and Experimental Validation of a Mole Rat’s Digit Inspired Biomimetic Potato Digging Shovel. Appl. Sci. 2022, 12, 1761. [Google Scholar] [CrossRef]
- Wei, Z.C.; Li, H.W.; Sun, C.Z.; Li, X.Q.; Su, G.L.; Liu, W.Z. Design and test of potato combine harvester based on multi-stage separation process. J. Agric. Mach. 2019, 50, 129–140+112. [Google Scholar]
- Yue, R.C. Research on the Decompression System of Potato Combine Harvester on the Ridge. Master’s Thesis, Shandong University of Technology, Zibo, China, 2020. [Google Scholar]
- Wu, H.C.; Hu, Z.C.; Peng, B.L.; Gu, F.W.; Wang, H.O.; Wang, B.K. Development of automatic row alignment system for towed sugar beet combine harvester. J. Agric. Eng. 2013, 29, 17–24. [Google Scholar]
- Li, T.; Zhou, J.; Xu, W.Y.; Zhang, H.; Liu, C.G.; Jiang, W. Design and test of automatic row alignment system for root and tuber crop harvester. J. Agric. Mach. 2019, 50, 102–110. [Google Scholar]
- Wang, S.Y.; Hu, Z.C.; Chen, Y.Q.; Gu, F.W.; Peng, B.L.; Lv, X.L. Development of automatic row-to-row digging and harvesting test bed for subsoil crops. J. Agric. Eng. 2020, 36, 29–37. [Google Scholar]
- Wu, J.M.; Li, F.; Sun, W.; Huang, X.P.; Zhang, W. Experimentation of a finger-wheel potato digger. J. Agric. Eng. 2011, 27, 173–177. [Google Scholar]
- Chen, S.D.; Hu, Z.C.; Wang, B.; You, S.Y.; Peng, B.L.; Hu, L.L. Design and parameter optimization of potato and seedling separating mechanism of monorow single-row sweet potato combine harvester. J. Agric. Eng. 2019, 35, 12–21. [Google Scholar]
- Lv, J.Q.; Sun, H.; Tui, H.; Yang, X.H.; Liu, Z.F. Design and test of a two-row towed potato digger. Agric. Mech. Res. 2019, 41, 98–103. [Google Scholar] [CrossRef]
- Wei, Z.C.; Su, G.L.; Li, X.Q.; Wang, F.M.; Sun, C.Z.; Meng, P.X. Optimization and experimentation of wavy screen surface parameters of potato harvester based on discrete elements. J. Agric. Mach. 2020, 51, 109–122. [Google Scholar]
- Wei, Z.C.; Han, M.; Su, G.L.; Zhang, H.; Li, X.Q.; Jin, C.Q. 4UL-2 potato tonnage bale combine harvester design and test. J. Agric. Mach. 2023, 1–12. [Google Scholar]
- Wei, Z.C.; Li, H.W.; Su, G.L.; Sun, C.Z.; Liu, W.Z.; Li, X.Q. Development of buffer sieve-type potato harvester for separating potato impurities. J. Agric. Eng. 2019, 35, 1–11. [Google Scholar]
- Wei, Z.C.; Li, H.W.; Su, G.L.; Sun, C.Z.; Liu, W.Z.; Li, X.Q. Design and test of low spreading double buffer potato harvester. J. Agric. Mach. 2019, 50, 140–152. [Google Scholar]
- Feng, B.; Sun, W.; Sun, B.G.; Zhang, T.; Wu, J. Study on the impact characteristics of potato tuber drop and damage law during harvesting in Shilinrong. Vib. Shock. 2019, 38, 267–274. [Google Scholar]
- Feng, B. Research on physical characteristics and damage mechanism of potato tubers during harvest. Ph.D. Thesis, Gansu Agricultural University, Lanzhou, China, 2018. [Google Scholar]
- Feng, B.; Wang, H.C.; Wang, G.P.; Sun, W.; Shi, L.R.; Tian, B. Optimization and experimentation of separation sieve operating parameters of a small potato harvester. Agric. Mech. Res. 2024, 46, 138–144+152. [Google Scholar]
- Feng, B.; Sun, W.; Shi, L.Y.; Sun, B.G.; Zhang, T.; Wu, J.M. Determination of collision recovery coefficient of potato tubers at harvest time and analysis of influencing factors. J. Agric. Eng. 2017, 33, 50–57. [Google Scholar]
- Lü, J.Q.; Zhao, Z.M.; Yang, D.Q.; Zhu, X.X.; Qi, Y. Research on screening and conveying device of potato harvester. In Proceedings of the Potato Industry and Seed Industry Innovation, Qiqihar, China, 16 July 2023; Potato Industry and Seed Innovation: Qiqihar, China, 2023; p. 7. [Google Scholar]
- Lü, J.Q.; Sun, H.; Dui, H.; Li, Z.H. Research and experiment on the configuration of lifting bars of potato harvester. In Proceedings of the Potato Industry and Poverty Alleviation, Zhaotong, China, 8 July 2018; Potato Committee of the Chinese Society of Crop Science: Beijing, China, 2018; p. 8. [Google Scholar]
- Lv, J.Q.; Wang, P.R.; Liu, Z.F.; Li, Z.H.; Zou, F.Y.; Yang, D.Q. Potato Harvester Potato Seedling Separation Device Design and Test. J. Agric. Mach. 2019, 50, 100–109. [Google Scholar]
- Lv, J.Q.; Yang, X.H.; Lv, Y.N.; Li, Z.H.; Li, J.C.; Du, C.L. Analysis and test of tuber damage mechanism during potato digger lifting and transportation separation. J. Agric. Mach. 2020, 51, 103–113. [Google Scholar]
- Lv, J.Q.; Liu, J.N.; Zhu, S.X.; Li, J.C.; Qi, Y. Design and test of digging device of potato harvester under clay-heavy black soil conditions. J. Northeast Agric. Univ. 2024, 55, 76–89. [Google Scholar]
- Lv, J.Q.; Sun, H.; Tui, H.; Peng, M.M.; Yu, J.Y. Improved design and test of separating and conveying device of potato digger under clay soil. J. Agric. Mach. 2017, 48, 146–155. [Google Scholar]
- Chen, M.; Liu, X.; Hu, P.; Zhai, X.; Han, Z.; Shi, Y.; Zhu, W.; Wang, D.; He, X.; Shang, S. Study on Rotor Vibration Potato-Soil Separation Device for Potato Harvester Using DEM-MBD Coupling Simulation. Comput. Electron. Agric. 2024, 218, 108638. [Google Scholar]
- Liang, Z.; Huang, Y.; Li, D.; Wada, M.E. Parameter Determination of a Viscoelastic–Plastic Contact Model for Potatoes during Transient Collisions. Biosyst. Eng. 2023, 234, 156–171. [Google Scholar] [CrossRef]
- Bentini, M.; Caprara, C.; Martelli, R. Harvesting Damage to Potato Tubers by Analysis of Impacts Recorded with an Instrumented Sphere. Biosyst. Eng. 2006, 94, 75–85. [Google Scholar] [CrossRef]
- Wang, B. Research on the mechanism and screening characteristics of fruit picking in four-row semi-fed peanut combine harvesting. Ph.D. Thesis, Chinese Academy of Agricultural Sciences, Beijing, China, 2018. [Google Scholar]
- Wang, J.; Liao, M.; Xia, H.; Chen, R.; Li, J.; Li, J.; Yang, J. Study on a Novel Reseeding Device of a Precision Potato Planter. Agriculture 2024, 14, 1824. [Google Scholar] [CrossRef]
- Wei, Z.C.; Han, M.; Su, G.L.; Zhang, H.; Li, X.Q.; Jin, C.Q. Design and test of bale-loading and bale-unloading potato combine harvester. J. Agric. Mach. 2023, 54, 92–104. [Google Scholar]
- Ouyang, A.; Cui, T.; Lin, L. Status quo of intelligent agricultural machinery and equipment industry and development suggestions. Sci. Technol. Her. 2022, 40, 55–66. [Google Scholar]
- Chen, X.G.; Wen, H.J.; Zhang, W.R.; Pan, F.D.; Zhao, Y. Current status and direction of the development of integration of agricultural machinery and information technology. Smart Agric. 2020, 2, 1–16, (In Chinese and English). [Google Scholar]
- Zhai, C.Y.; Yang, S.; Wang, X.; Zhang, C.F.; Song, J. Current Status and Prospect of Research on Intelligent Measurement and Control Technology for Agricultural Machinery and Equipment. J. Agric. Mach. 2022, 53, 1–20. [Google Scholar]
- Dong, S.; Yuan, C.H.; Gu, C.; Yang, F. A review of research on intelligent agricultural machine control platform based on multidisciplinary technology integration. J. Agric. Eng. 2017, 33, 1–11. [Google Scholar]
- Zhou, Z.; Huang, Y.; Li, X.Y.; Wen, D.D.; Wang, C.L.; Tao, H.L. An automatic potato grading method based on machine vision. J. Agric. Eng. 2012, 28, 178–183. [Google Scholar]
- Wang, H.J.; Xiong, J.T.; Li, Z.Z.; Deng, J.M.; Zou, X.J. A method for grading potato quality and shape based on machine vision image feature parameters. J. Agric. Eng. 2016, 32, 272–277. [Google Scholar]
- Jin, C.Q.; Yang, T.X.; Liu, G.W.; Wang, T.E.; Chen, M.; Liu, Z. Crawler Combine Harvester Omnidirectional Leveling Chassis Design and Test. J. Agric. Mach. 2020, 51, 393–402. [Google Scholar]
- Liu, H.X.; Li, J.L.; Guo, L.F.; Zhang, G.F. Research on knowledge organization and knowledge base system of combine harvester. J. Agric. Mach. 2021, 52, 381–393. [Google Scholar]
- Yao, M.; Lv, J.; Wang, L.; Yue, R.; Hu, J. Cooperative Operation Method of Seedling Conveying and Picking by Full-Automatic Transplanter Based on Multi-Sensor Combination. Comput. Electron. Agric. 2024, 225, 109311. [Google Scholar]
- Yang, L.; Li Zhang, X.; Yaoming, L.; Liya, L.; Maolin, S. Modeling and Control Methods of a Multi-Parameter System for Threshing and Cleaning in Grain Combine Harvesters. Comput. Electron. Agric. 2024, 225, 109251. [Google Scholar]
- Zheng, G.N.; Tan, Y.Z.; Zhang, J.X.; Li, W. Automatic detection and grading of potato based on computer vision. J. Agric. Mach. 2009, 40, 166–168+156. [Google Scholar]
- Rady, A.M.; Guyer, D.E. Rapid and/or Nondestructive Quality Evaluation Methods for Potatoes: A Review. Comput. Electron. Agric. 2015, 117, 31–48. [Google Scholar]
- Al-Mallahi, A.; Kataoka, T.; Okamoto, H. Discrimination between Potato Tubers and Clods by Detecting the Significant Wavebands. Biosyst. Eng. 2008, 100, 329–337. [Google Scholar]
- Yang, Q.; Huang, G.; Shi, X.; He, M.; Ahmad, I.; Zhao, X.; Addy, M. Design of a Control System for a Mini-Automatic Transplanting Machine of Plug Seedling. Comput. Electron. Agric. 2020, 169, 105226. [Google Scholar]
- Wang, B.; Hu, Z.C.; Hu, L.L.; Peng, B.L.; Wang, G.F.; Wang, B.K. Research status and development of sweet potato combine harvester. Jiangsu Agric. Sci. 2018, 46, 11–16. [Google Scholar]
- Wang, G.F.; Jiang, J.L.; Tian, Y.Q.; Zhou, S. Current status and development trend of potato mechanical harvesting technology. China Agric. Mach. Chem. J. 2014, 35, 11–15+21. [Google Scholar]
- Yang, H.G.; Hu, Z.C.; Wang, B.; Peng, B.L.; Wang, G.P. Progress of potato harvest mechanization technology research. Chin. J. Agric. Mech. Chem. 2019, 40, 27–34. [Google Scholar]
- Wang, L.; Liu, F.; Wang, Q.; Zhou, J.; Fan, X.; Li, J.; Zhao, X.; Xie, S. Design of a Spring-Finger Potato Picker and an Experimental Study of Its Picking Performance. Agriculture 2023, 13, 945. [Google Scholar] [CrossRef]
- Yang, R.B.; Yang, H.G.; Shang, S.Q.; Xu, P.X.; Cui, G.P.; Liu, L.H. Design and test of paddle roller push potato harvester. J. Agric. Mach. 2016, 47, 119–126. [Google Scholar]
- Li, Y.B.; Zhang, Z.G.; Wang, Y.M.; Wang, H.Y.; Pang, Y.L.; Zhang, Z.D. Design and test of multistage conveying and separating device for potato harvester. J. Shenyang Agric. Univ. 2021, 52, 758–768. [Google Scholar]
- Lv, J.Q.; Du, C.L.; Liu, Z.Y.; Li, J.C.; Li, Z.H.; Li, Z.Y. Design and test of potato hopper machine debris removal device. J. Agric. Mach. 2021, 52, 82–90+61. [Google Scholar]
- Chen, X.S.; Chen, T.; Wu, T.; Ma, X.; Zeng, L.C.; Chen, L.C. Mulching and winter planting potato harvester straw separation mechanism design and test. J. Jilin Univ. Eng. Ed. 2020, 50, 749–757. [Google Scholar]
- Hu, Z.C.; Peng, B.L.; Yin, W.Q.; Wang, H.O.; Ji, F.L.; Xie, H.X. Multi-functional Roots and Tubers Combined Harvester Design and Test. J. Agric. Mach. 2008, 39, 58–61. [Google Scholar]
- New breakthrough in small self-propelled potato combine harvester. China Agric. Mach. Chem. J. 2020, 41, 237.
- Wang, F.A.; Cao, Q.Z.; Li, Y.B.; Pang, Y.L.; Xie, T.; Zhang, Z.G. Design and passability test of self-propelled potato combine harvester in hilly mountainous area. J. Agric. Mach. 2023, 54, 10–19. [Google Scholar]
- Wei, H.A.; Wang, T.; Lian, W.H.; Shao, S.L.; Yang, S.; Huang, X.P. Development of 4UFD-1400 potato combine harvester. J. Agric. Eng. 2013, 29, 11–17. [Google Scholar]
- Wang, H.; Zhao, W.; Sun, W.; Liu, X.; Shi, R.; Zhang, H.; Chen, P.; Gao, K. The Design and Experimentation of a Wheeled-Chassis Potato Combine Harvester with Integrated Bagging and Ton Bag-Lifting Systems. Agriculture 2024, 14, 1461. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, Z.; Zhang, H.; Liu, X.; Li, H.; Sun, W.; Li, H. Investigation of the Traveling Performance of the Tracked Chassis of a Potato Combine Harvester in Hilly and Mountainous Areas. Agriculture 2024, 14, 1625. [Google Scholar] [CrossRef]
- Fan, J.; Li, Y.; Luo, W.; Yang, K.; Yu, Z.; Wang, S.; Hu, Z.; Wang, B.; Gu, F.; Wu, F. An Experimental Study of Stem Transported-Posture Adjustment Mechanism in Potato Harvesting. Agronomy 2023, 13, 234. [Google Scholar] [CrossRef]
- Tang, H.; Zhu, G.; Wang, Z.; Xu, W.; Xu, C.; Wang, J. Prediction Method for Maize Kernel Impact Breakage Based on High-Speed Camera and FEM. Powder Technol. 2024, 444, 120002. [Google Scholar] [CrossRef]
- Yang, R.B.; Yang, H.G.; Shang, S.Q.; Ni, Z.W.; Liu, Z.S.; Guo, D. Design and test of vertical ring separation conveyor for potato combine harvester. J. Agric. Eng. 2018, 34, 10–18. (In English) [Google Scholar]
- Yang, B.; Guo, W.; Huang, X.; Du, R.; Liu, Z. A Portable, Low-Cost and Sensor-Based Detector on Sweetness and Firmness Grades of Kiwifruit. Comput. Electron. Agric. 2020, 179, 105831. [Google Scholar] [CrossRef]
- Zhang, W.; Zhu, Q.; Zhang, T.; Liu, H.; Mu, G. Design and Control of a Side Dense Transplanting Machine for Sweet Potato Seedlings on Mulch Film. Comput. Electron. Agric. 2024, 224, 109193. [Google Scholar]
- Wang, H.Y. Design and test of self-propelled potato combine harvester in mountainous area. Master’s Thesis, Kunming University of Science and Technology, Kunming, China, 2022. [Google Scholar]
- Jia, J.X.; Zhang, D.X.; Hao, X.M.; Liu, H.W. Parametric modeling of potato harvester and simulation of key components of virtual prototype. J. Agric. Mach. 2005, 36, 70–73. [Google Scholar]
- Liu, W.J.; Luo, X.W.; Zeng, S.; Zeng, L. Performance test and analysis of adaptive profiling cutter for regenerated rice based on fuzzy PID control. J. Agric. Eng. 2022, 38, 1–9. [Google Scholar]
- Wang, B. Analysis and discussion of mechanized sowing and harvesting of garlic at home and abroad. Agric. Dev. Equip. 2020, 159–161. [Google Scholar]
- Liu, C.; Wu, N.; Cheng, G.; Wu, F.; Gu, F.; Shi, L.; Wang, B. Design and Optimization of a Lightweight and Simple Self-Propelled Crawler Potato Combine Harvester. Agronomy 2025, 15, 65. [Google Scholar] [CrossRef]
- Li, W.H.; Lv, D.Q.; Min, F.X. Comparative analysis of potato production profiles in China, the Netherlands and Belgium. China Potato 2018, 32, 54–60. [Google Scholar]
- Yang, B.N.; Zhang, S.Y.; Zhao, F.M.; Liu, W.; Yang, Y.C.; Li, S.J. Characterization of common potato varieties and classification of processing suitability. J. Food Sci. Technol. 2016, 34, 28–36. [Google Scholar]
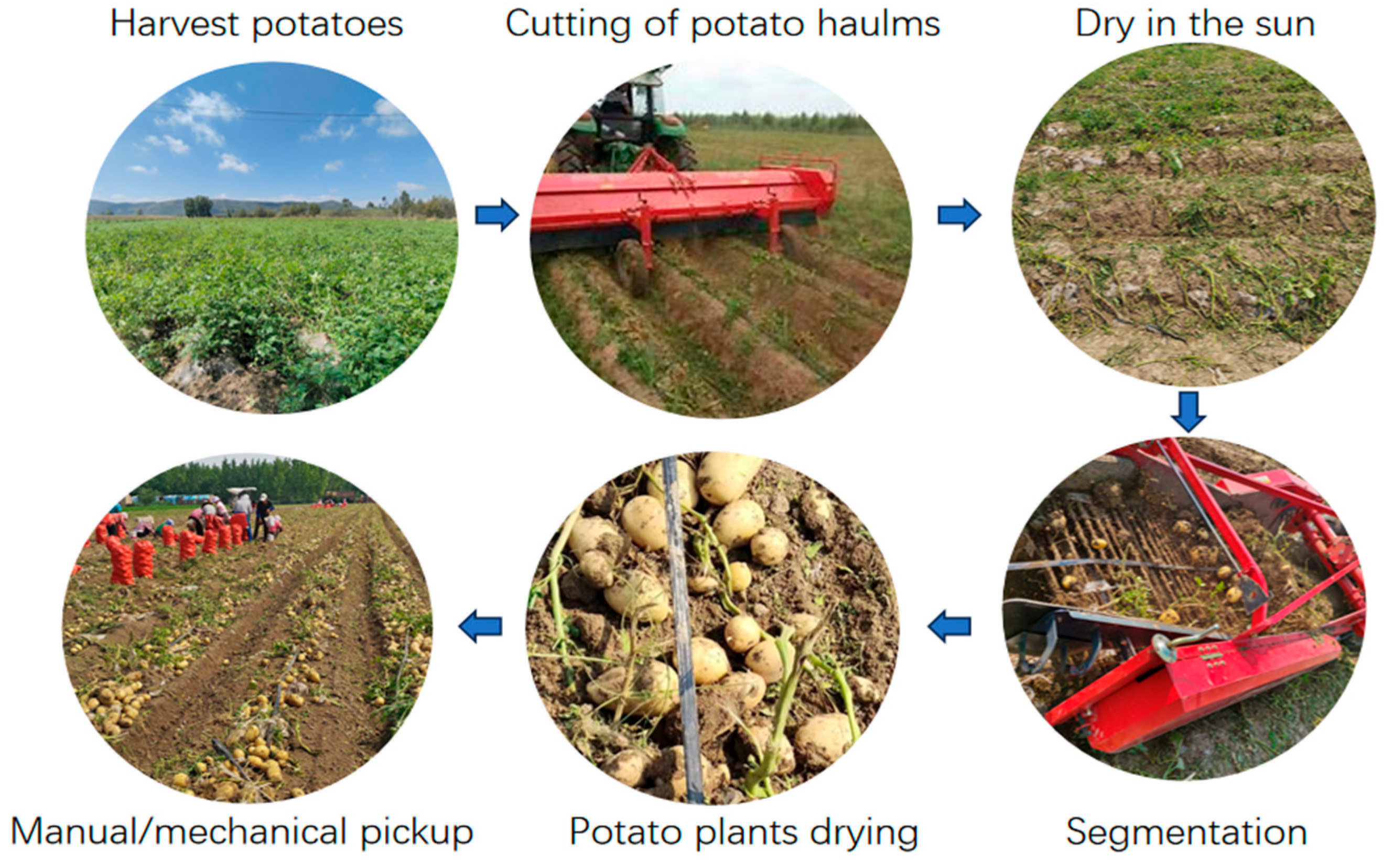
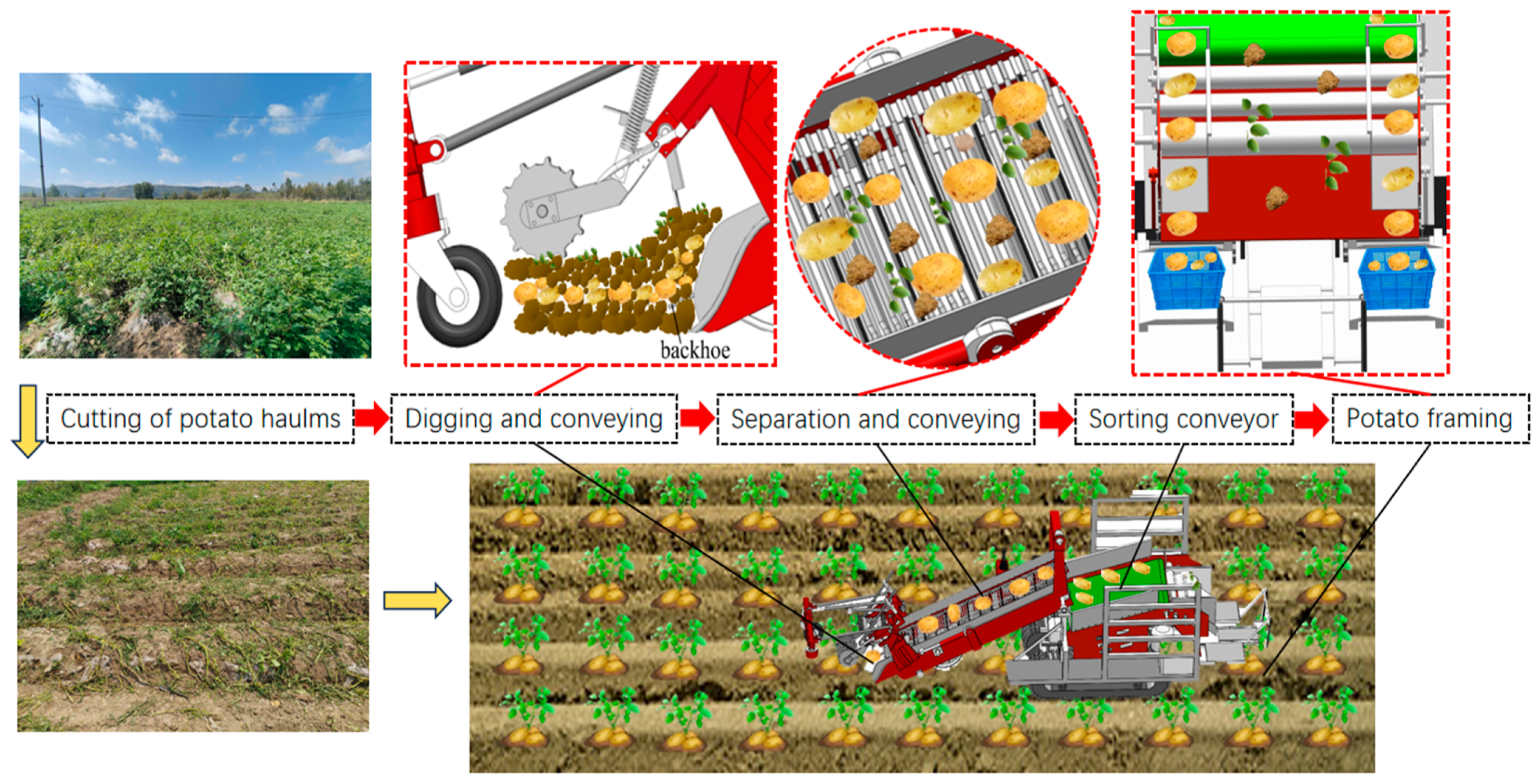
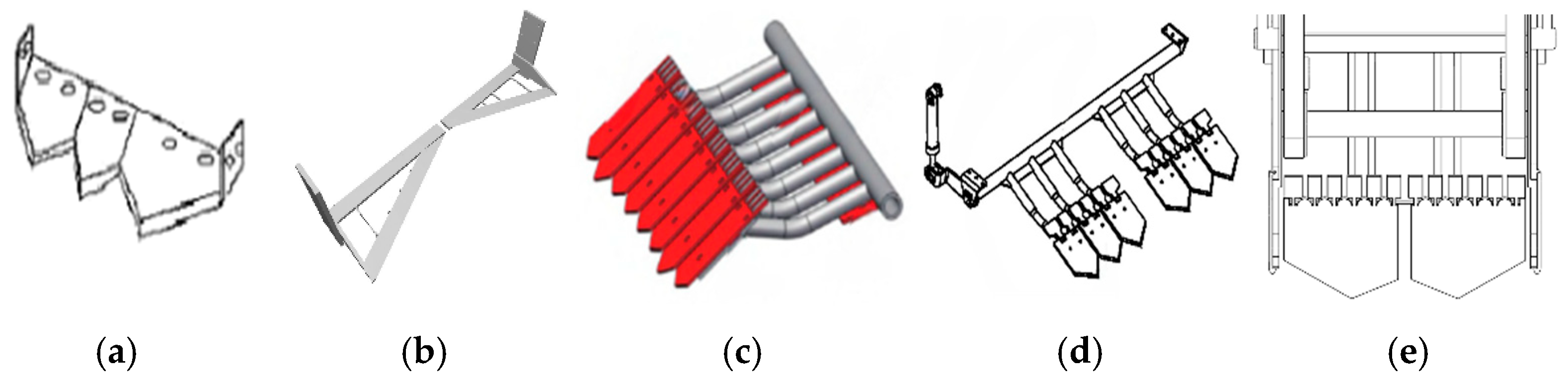
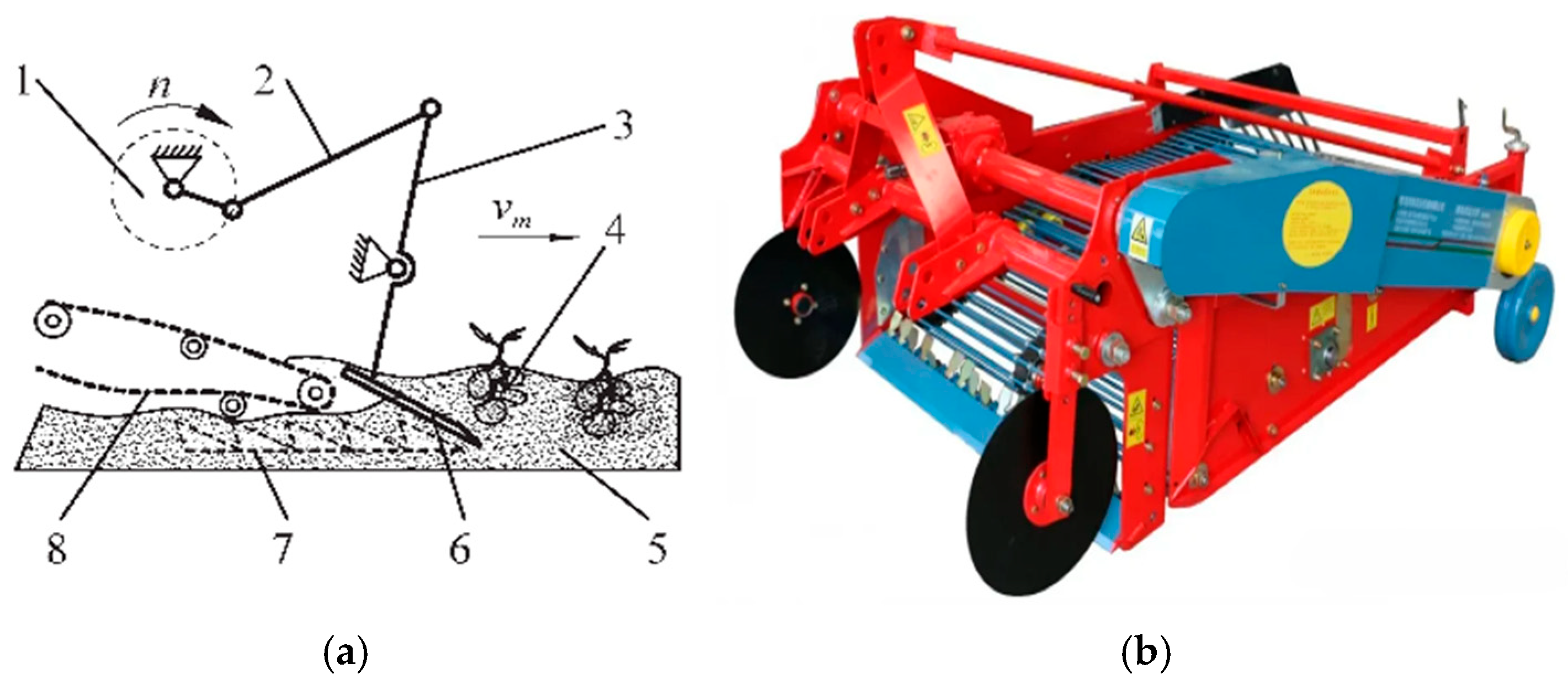

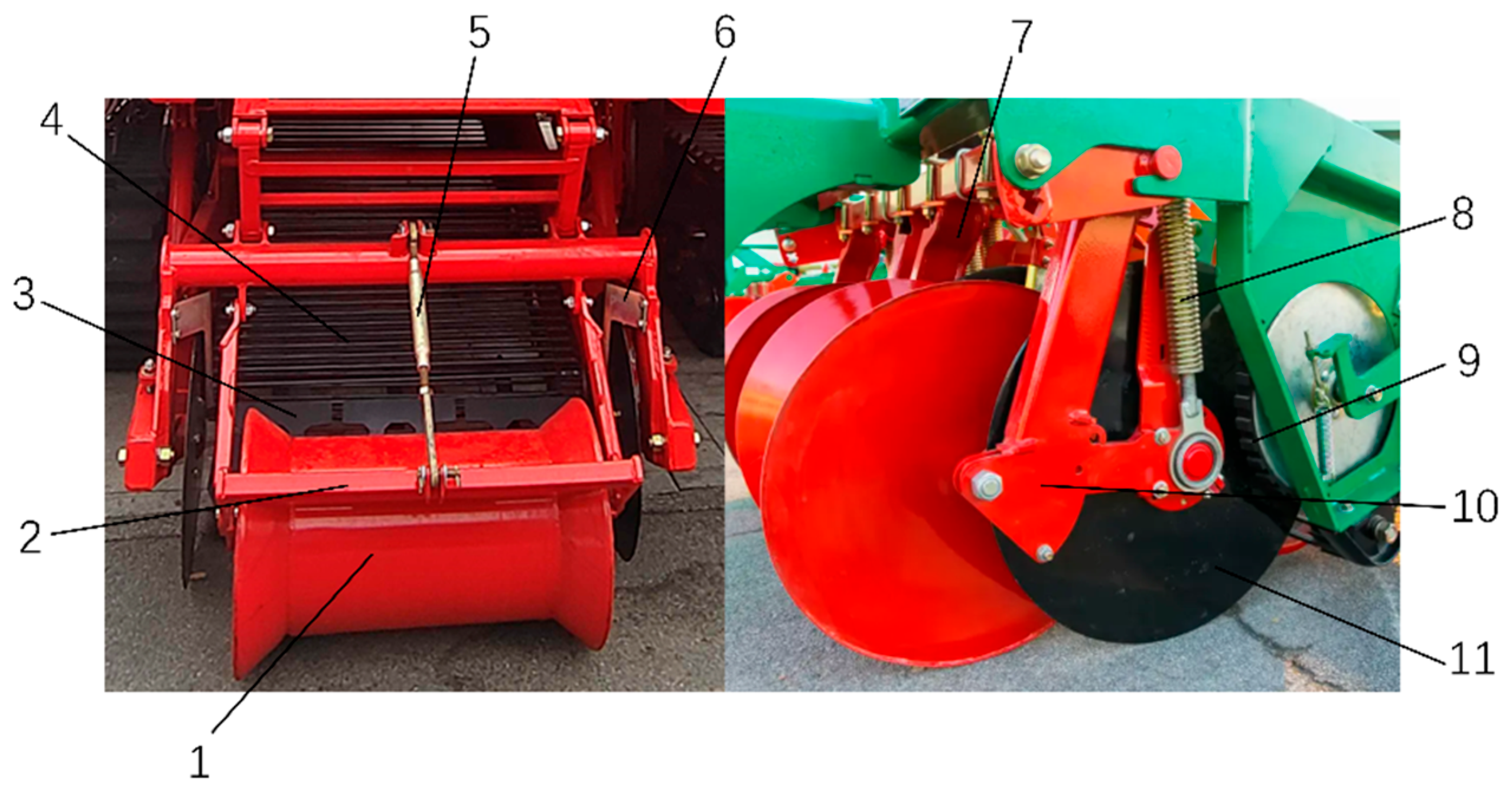
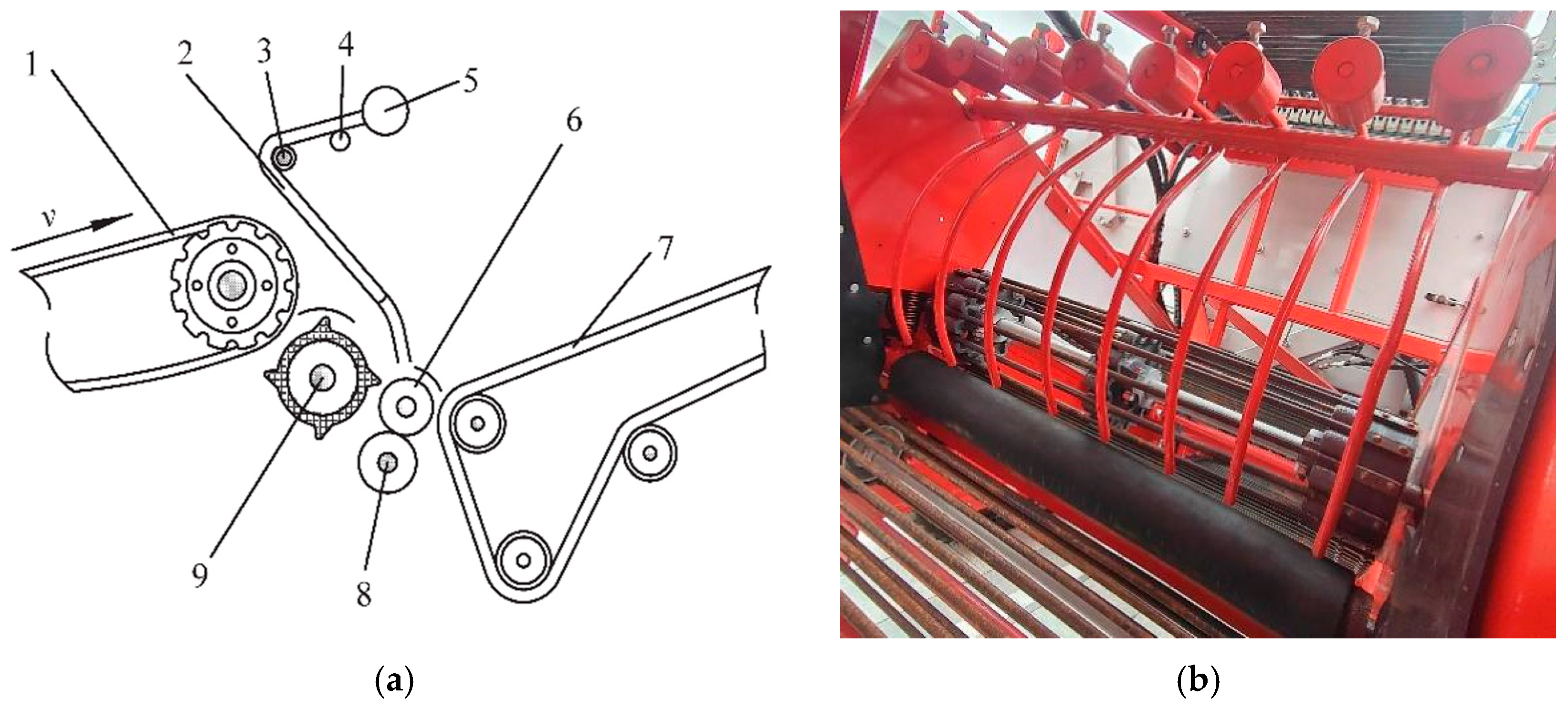
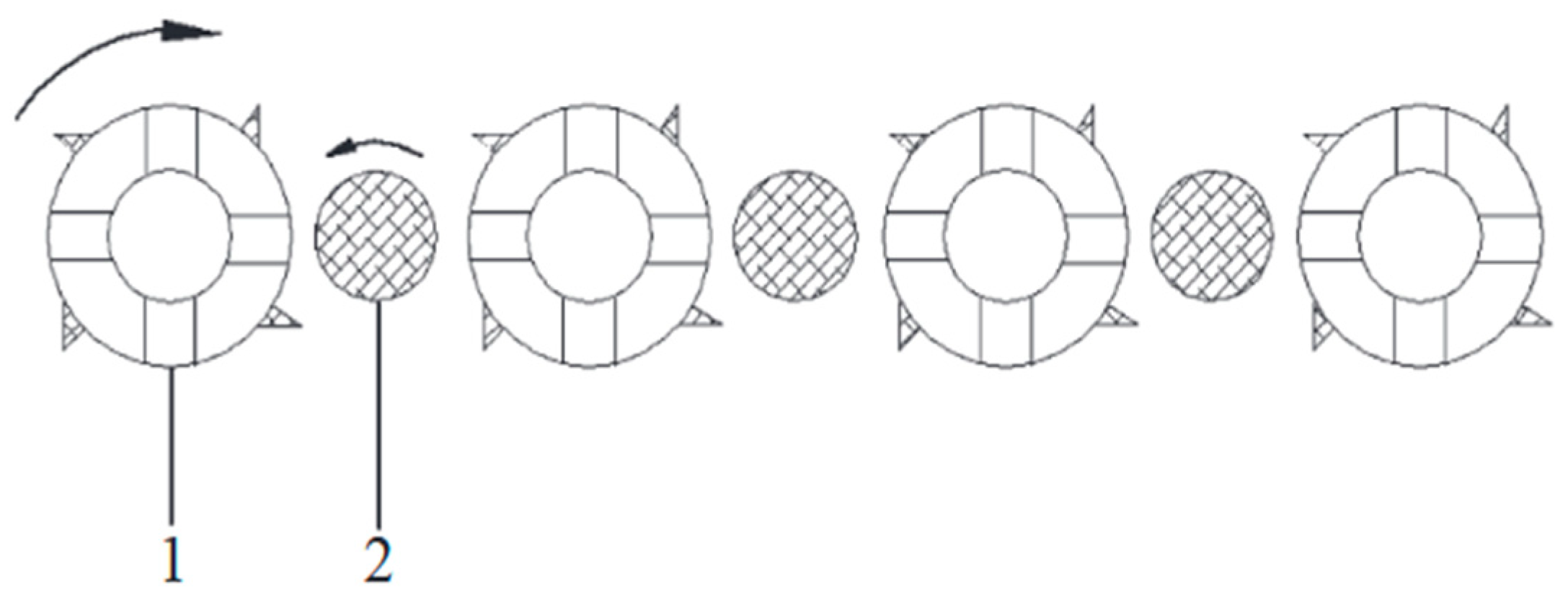
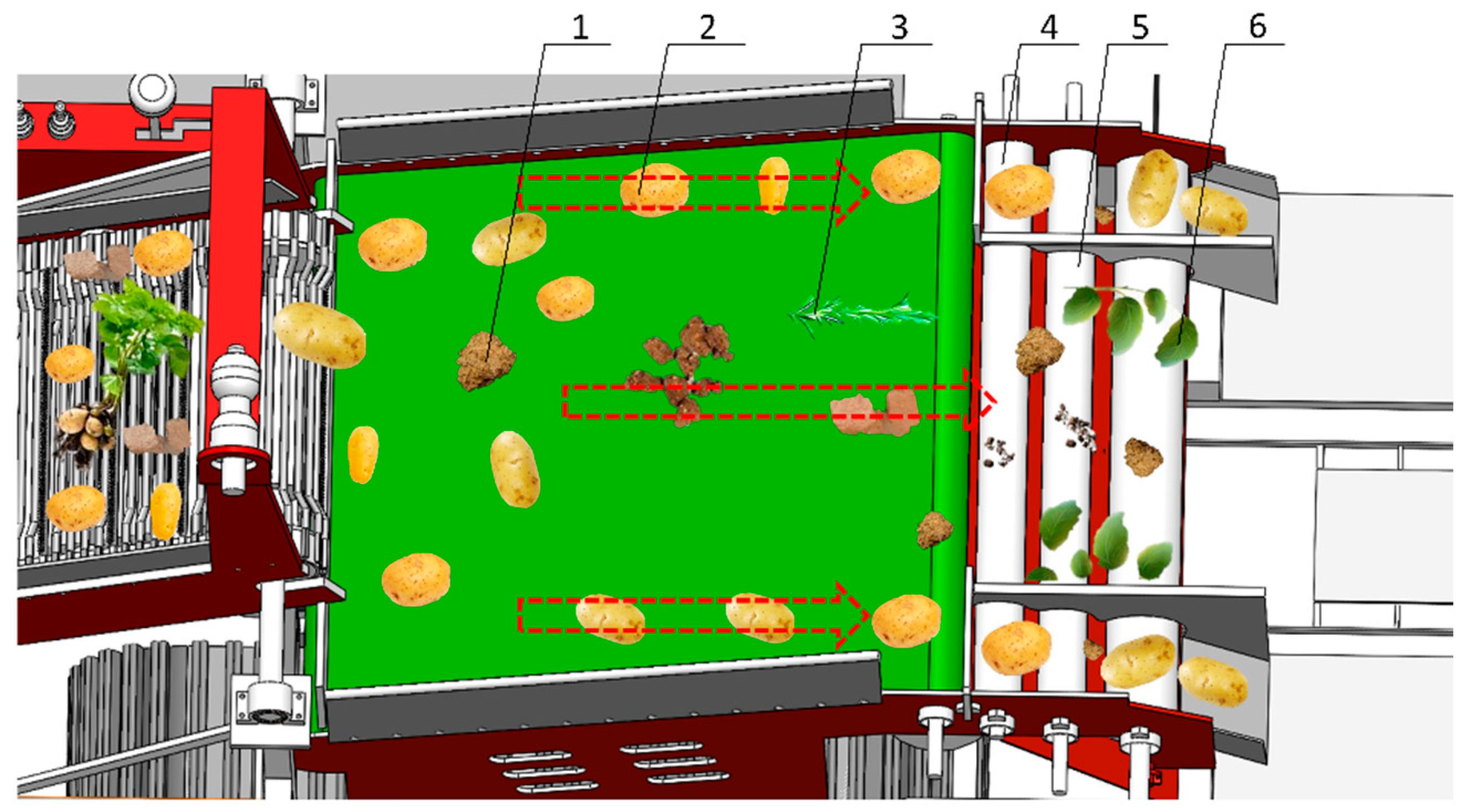
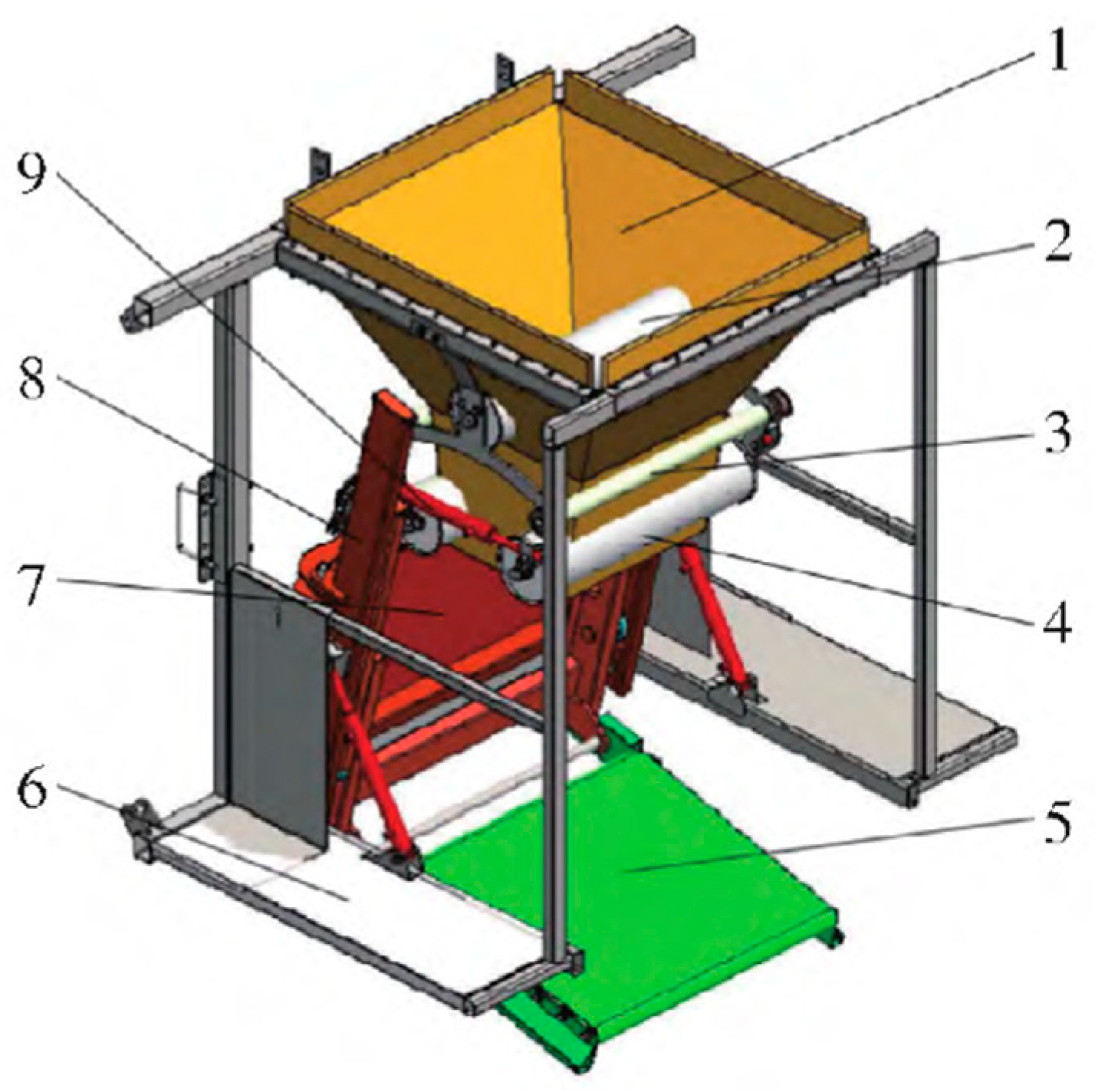
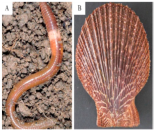









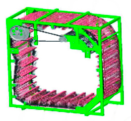
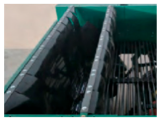

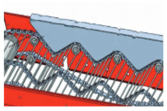























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).