Development of a Variable Rate Chemical Sprayer for Monitoring Diseases and Pests Infestation in Coconut Plantations


Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Set up and Field Preparation
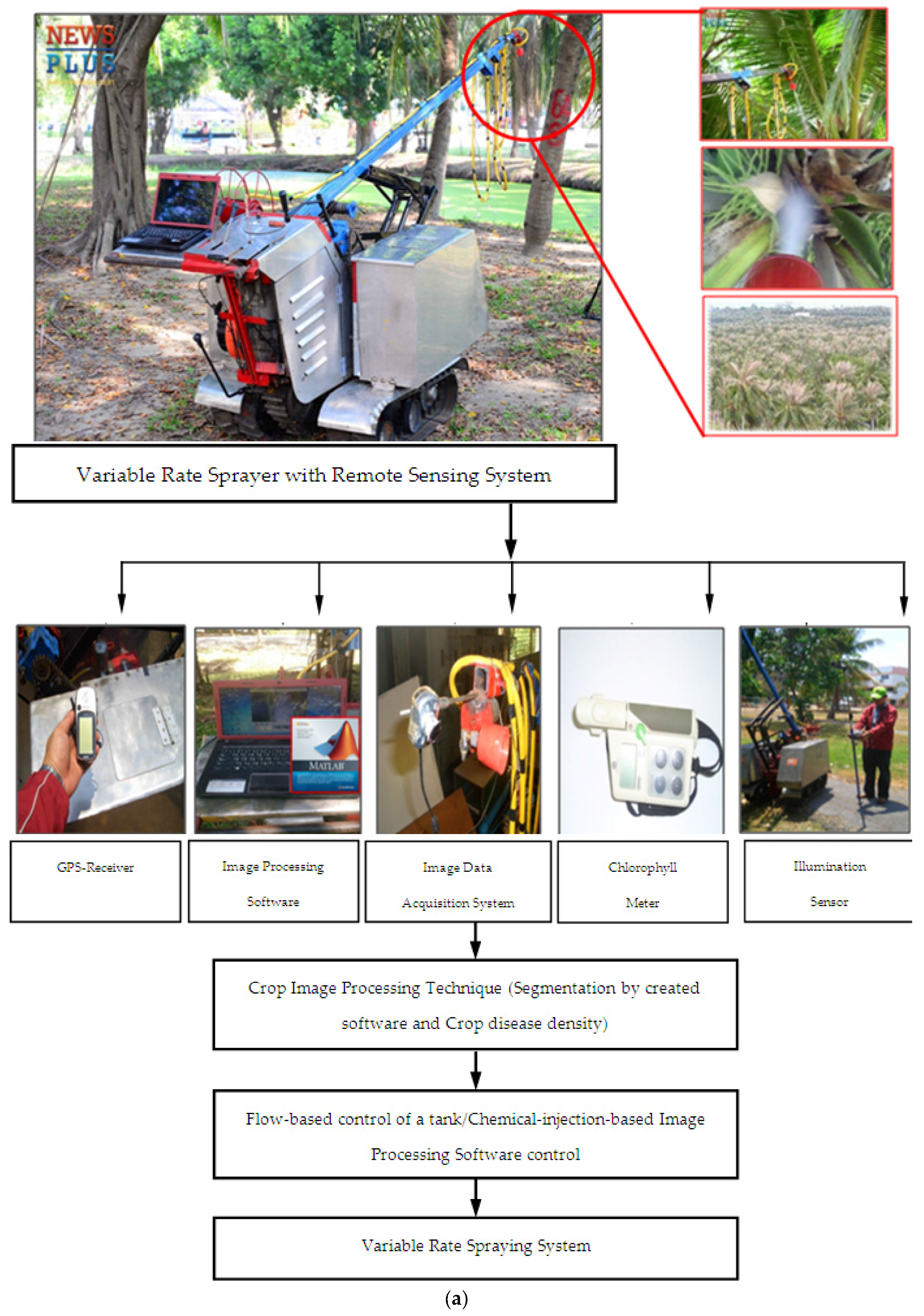
2.2. Image Data Acquisition System
2.3. Design and Fabrication of Variable Rate Chemical Sprayer
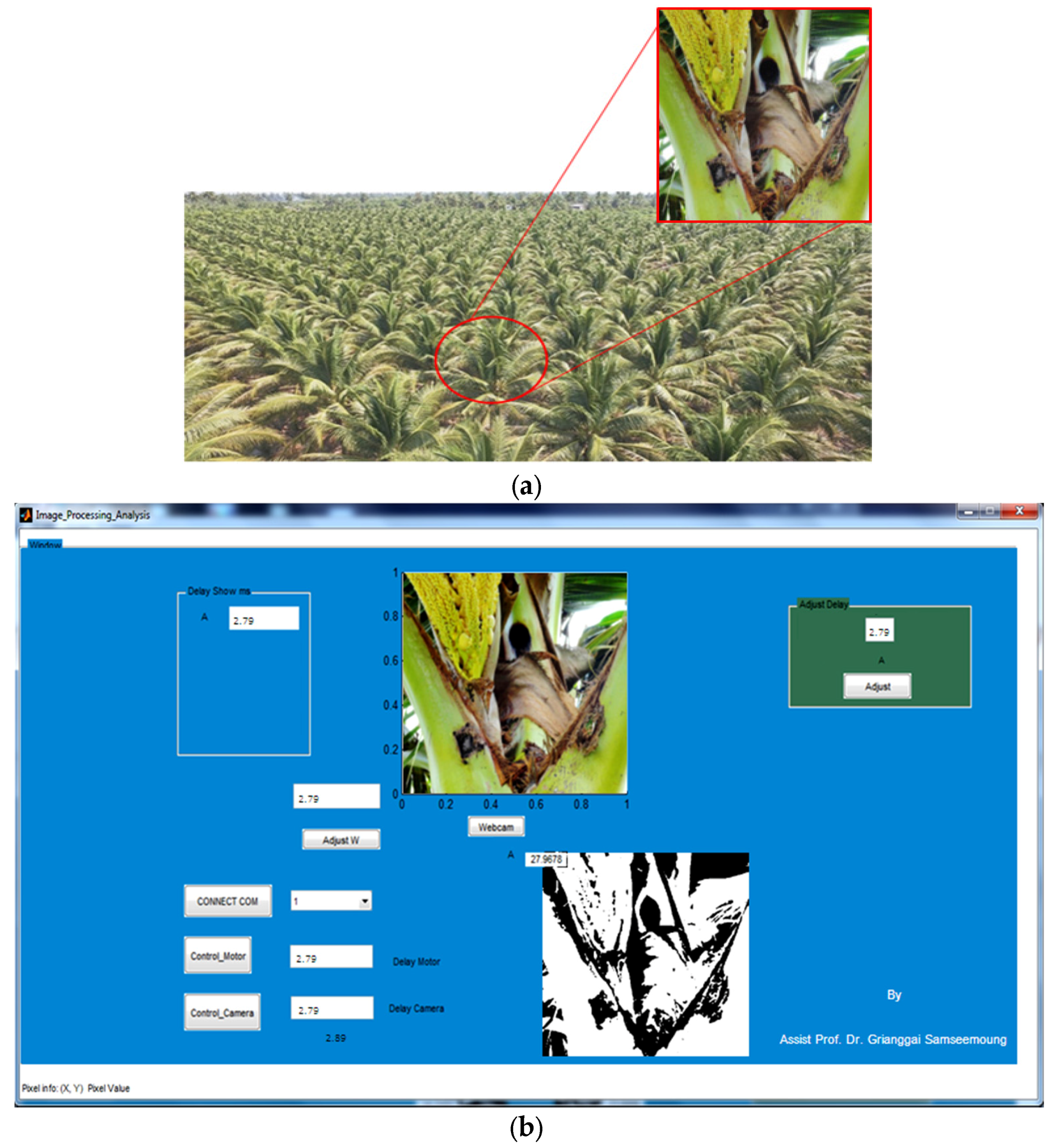
2.3.1. Observation of Pests and Disease Infestation at the Coconut Tree Canopy
2.3.2. Fabrication of the Variable Rate Chemical Sprayer with Remote Monitoring System
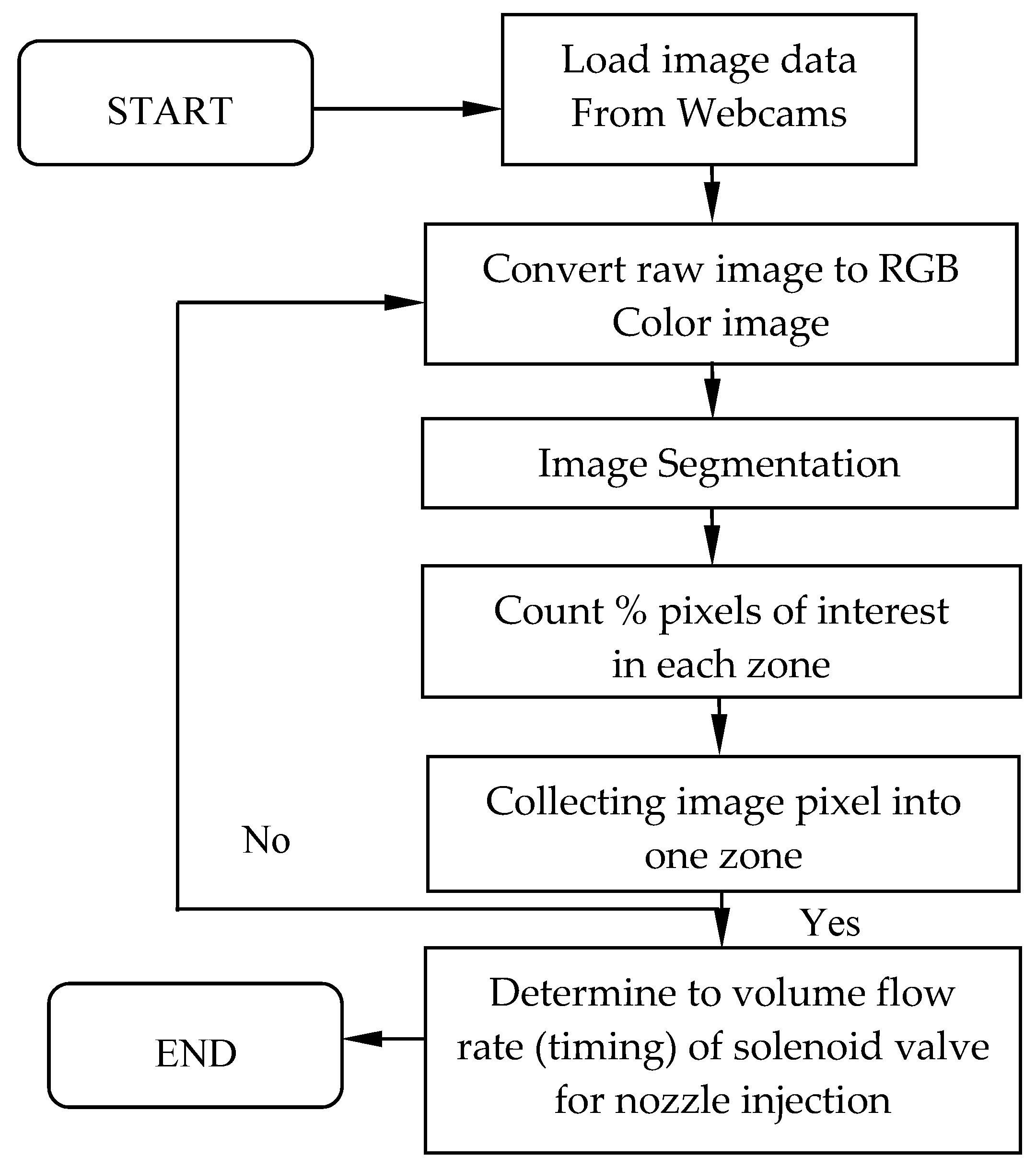
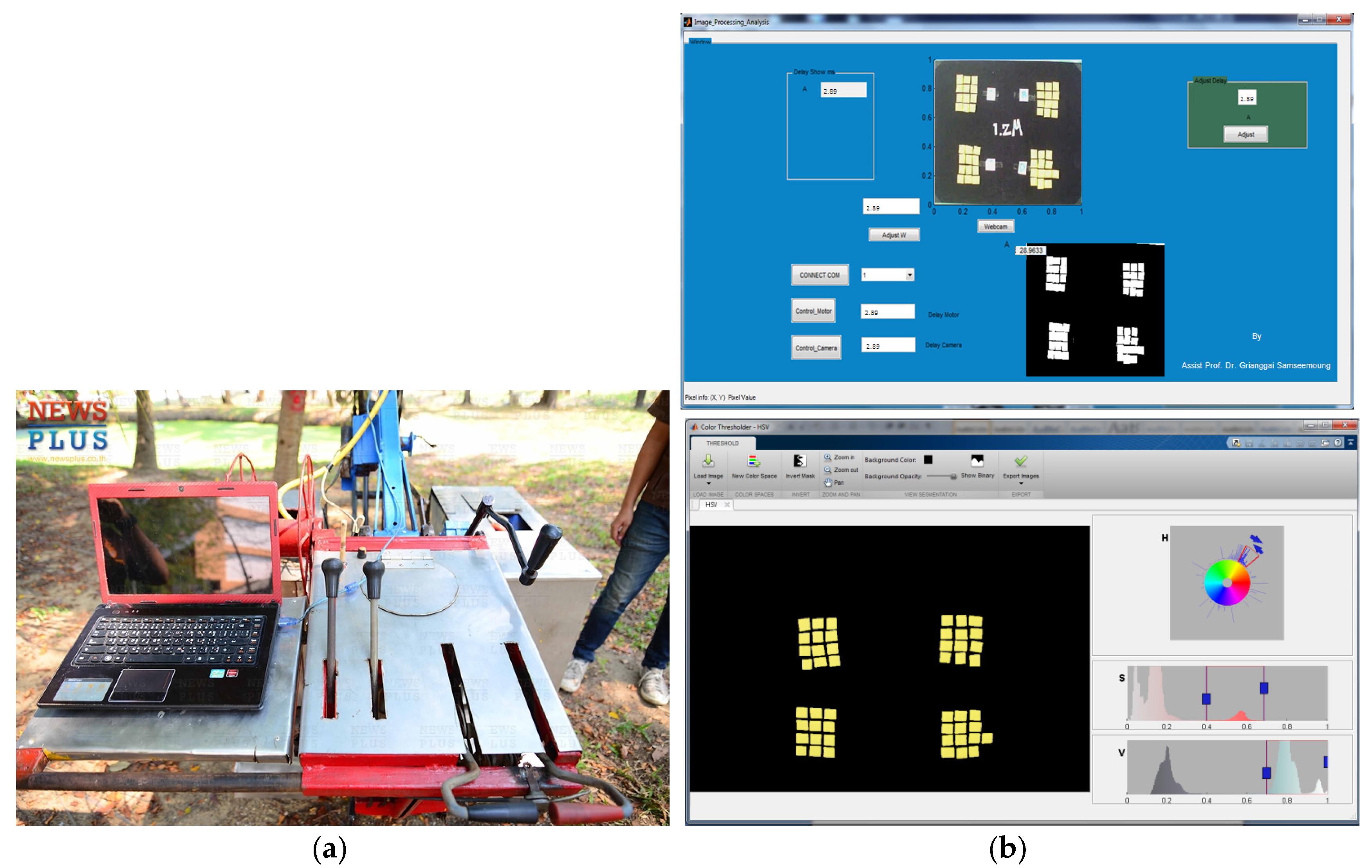
2.4. Image Processing Software
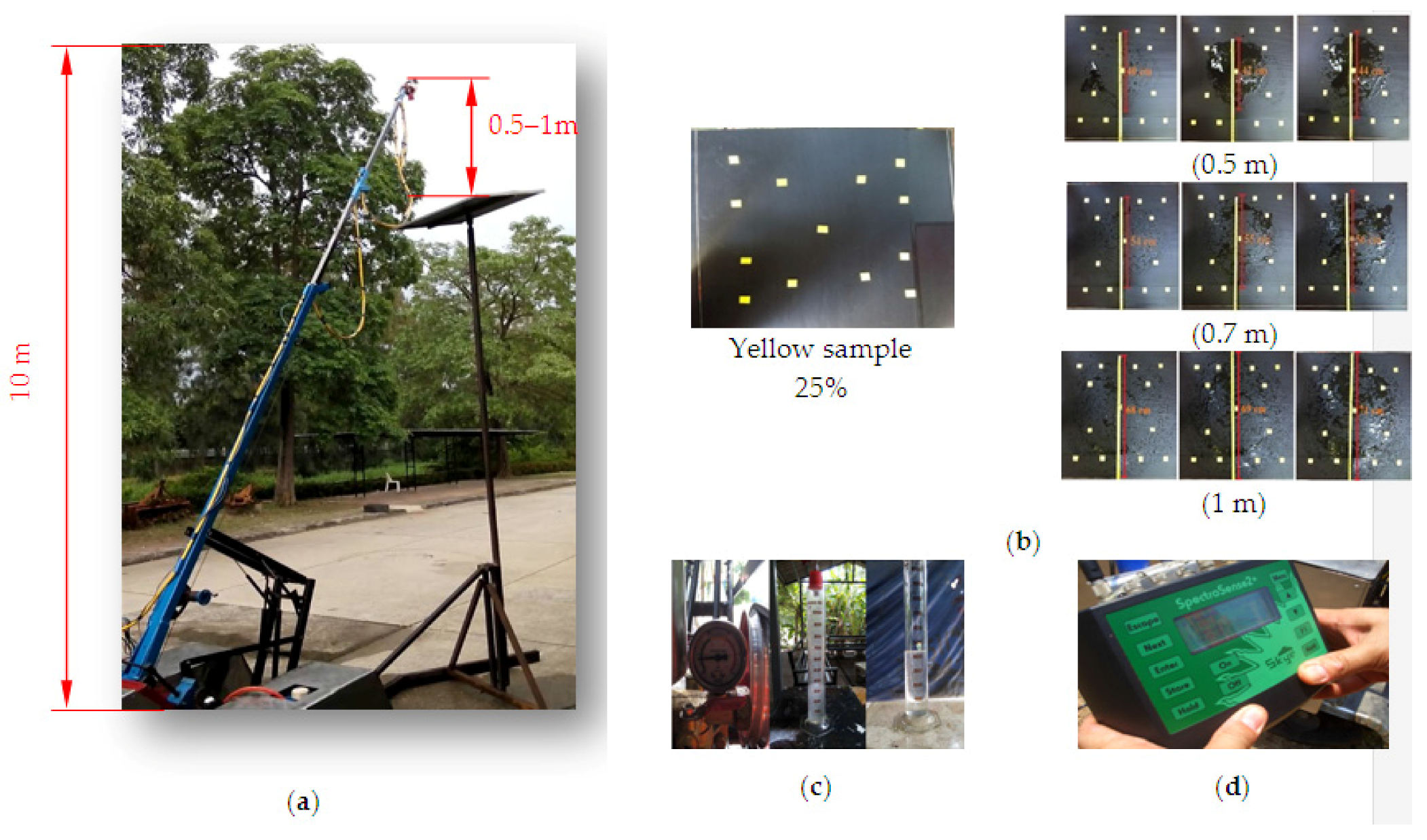
2.5. Field Testing and Performance Evaluation
- a)
- Actual working capacity of the sprayer (ha/h)
- b)
- Fuel consumption of the sprayer (L/h)
- c)
- Electricity consumption of the sprayer (kW/h)when
- I = Electricity current (Ampere)
- V = Electromotive force (Volt)
- t = Working time (h)
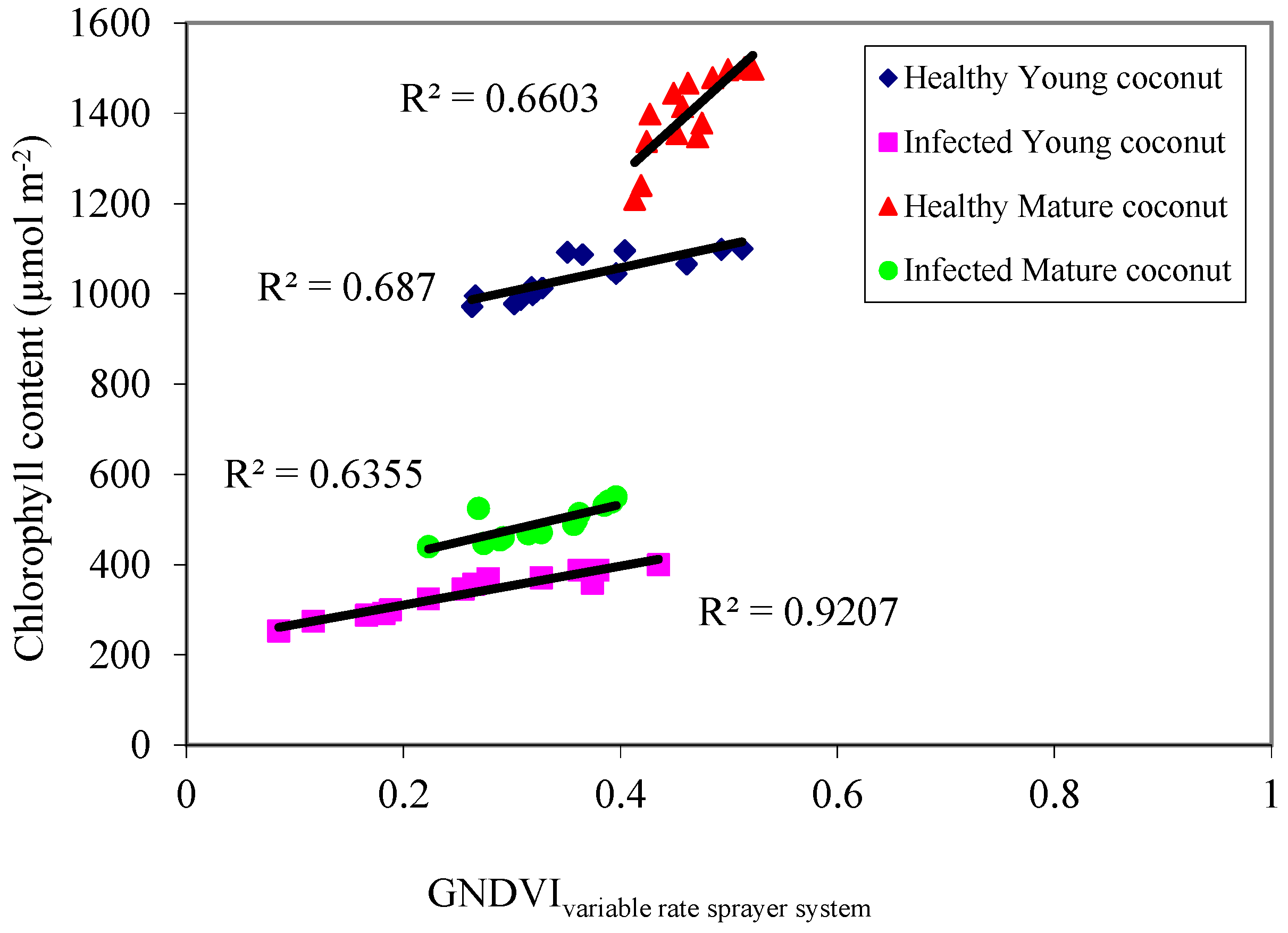
2.6. Calibration
2.7. Statistical Analysis
3. Results
3.1. Chemical Spraying
3.2. Machine Performance
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| Full Name | Symbol |
| Hectare | ha |
| Kilogram | kg |
| Kilowatt | kW |
| Kilowatt-hour | kW h |
| Liter | L |
| Meter | m |
| Revolutions per minute | rpm |
| Square | sq. |
| Volt | V |
| Watt | W |
| Horse power | Hp |
References
- Office of agricultural economics: Ministry of agriculture and cooperatives. Agricultural Economic Basic Information. 2015. Available online: http://www.oae.go.th (accessed on 9 November 2015).
- Abidin, C.M.R.Z.; Ahmad, A.H.; Salim, H.; Hamid, N.H. Population dynamics of Oryctes rhinoceros in decomposing oil palm trunks in areas practicing zero burning and partial burning. J. Oil Palm Res. 2014, 26, 140–145. [Google Scholar]
- Bedford, G.O. Advances in the control of rhinoceros beetle, Oryctes rhinoceros in oil palm. J. Oil Palm Res. 2014, 26, 183–194. [Google Scholar]
- Zaman, Q.U.; Esau, T.J.; Schumann, A.W.; Percival, D.C.; Chang, Y.K.; Read, S.M.; Farooque, A.A. Development of prototype automated variable rate sprayer for real-time spot-application of agrochemicals in blueberry fields. Comput. Electron. Agric. 2011, 76, 175–182. [Google Scholar] [CrossRef]
- Stafford, J.V.; Benloch, J.V. Machine assisted detection of weeds and weed patches. In Precision Agriculture; Stafford, J.V., Ed.; BIOS Scientific Publishers Limited: Oxford, UK, 1997; pp. 511–518. [Google Scholar]
- Samseemoung, G.; Jayasuriya, H.P.W.; Soni, P. Oil palm pest infestation monitoring and evaluation by helicopter-mounted, low altitude remote sensing platform. J. Appl. Remote Sens. 2011, 5, 053540. [Google Scholar] [CrossRef]
- Samseemoung, G.; Soni, P.; Jayasuriya, H.P.W.; Salokhe, V.M. Application of low altitude remote sensing (LARS) platform for monitoring crop growth and weed infestation in a soybean plantation. Precis. Agric. 2012, 13, 611. [Google Scholar] [CrossRef]
- Samseemoung, G.; Soni, P.; Sirikul, C. Monitoring and Precision Spraying for Orchid Plantation with Wireless WebCAMs. Agriculture 2017, 7, 87. [Google Scholar] [CrossRef]
- Tangwongkit, R.; Salokhe, V.; Jayasuriya, H.P.W. Development of a Tractor Mounted Real-time, Variable Rate Herbicide Applicator for Sugarcane Planting. Agric. Eng. Int. 2006, 8, 1–11. [Google Scholar]
- Tian, L. Development of a sensor-based precision herbicide application system. Comput. Electron. Agric. 2002, 36, 133–149. [Google Scholar] [CrossRef]
- Tian, L.; Steward, B.; Tang, L. Smart sprayer project: Sensor-based selective herbicide application system. Proc. SPIE 2000, 4203, 73–80. [Google Scholar]
- Markwell, J.; Osterman, J.C.; Mitchell, J.L. Calibration of the Minolta SPAD-502 leaf chlorophyll meter. Photosynth. Res. 1995, 46, 467–472. [Google Scholar] [CrossRef] [PubMed]
- Gitelson, A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens.Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Jusoff, K.; Hussein, Z.H.; SoonYew, J.; Din, M.S.H. The Life Satisfaction of academic and Non-Academic Staff in a Malaysian Higher Education Institution. Int. Educ. Stud. 2009, 2, 143–150. [Google Scholar] [CrossRef]
- Landers, A.J.; Larzelere, W.; Muise, B. Advances in autonomous pesticide application technology for orange groves. In Aspects of Applied Biology 114, International Advances in Pesticide Application; Association of Applied Biologists: Wageningen, The Netherlands, 2012; pp. 91–98. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coconut Age (year) | Rate of Fertilizer 13-13-21 or 12-12-17 (kg/m2) | Magnesium Sulfate, MgSO4 (kg/m2) | Dolomite, CaMg (CO3)2 (kg/m2) |
|---|---|---|---|
| 1 | 1 | 0.2 | - |
| 2 | 2 | 0.3 | 2 |
| 3 | 3 | 0.4 | 3 |
| 4 or more | 4 | 0.5 | 4 |
| Soil depth (cm) | 0–20 | ||
| pH | 6–7 | ||
| Soil Texture | Clay | ||
| Sand (%) | 15 | ||
| Silt (%) | 30 | ||
| Clay (%) | 55 | ||
| Organic matter (%) | 1.54 | ||
| Particle density (g/cm3) | 2.42 | ||
| Bulk density (g/cm3) | 1.37 | ||
| Moisture content (%) d.b. | 23 | ||
| Pressure (bar) | Fluid Flow Rate (mL/10s), | Average Fluid Flow Rate (L/min) | S.D. (L/min) |
|---|---|---|---|
| 1 | 412.67 | 2.706 | 2.517 |
| 1.5 | 452.33 | 2.712 | 1.528 |
| 2 | 547.33 | 3.27 | 2.082 |
| Altitude of Spraying Density of Yellow Color | Height of Nozzle above the Target Sample (m) | |||
|---|---|---|---|---|
| 0.5 | 0.7 | 1 | ||
| 5 m | ||||
| 25% | 42.00 a | 55.00 c | 69.33 e | |
| 50% | 43.00 b | 56.67 d | 69.67 e,f | |
| 100% | 43.67 b | 56.67 d | 70.33 f | |
| 7 m | ||||
| 25% | 42.00 a | 58.33 b | 71.00 c | |
| 50% | 43.00 a | 57.67 b | 70.00 c | |
| 100% | 43.67 a | 58.00 b | 71.33 c | |
| 9 m | ||||
| 25% | 42.00 a | 59.67 c | 71.00 d | |
| 50% | 43.00 a | 56.67 b | 70.67 d | |
| 100% | 43.67 a | 58.67 b,c | 72.00 d | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Samseemoung, G.; Soni, P.; Suwan, P. Development of a Variable Rate Chemical Sprayer for Monitoring Diseases and Pests Infestation in Coconut Plantations. Agriculture 2017, 7, 89. https://doi.org/10.3390/agriculture7100089
Samseemoung G, Soni P, Suwan P. Development of a Variable Rate Chemical Sprayer for Monitoring Diseases and Pests Infestation in Coconut Plantations. Agriculture. 2017; 7(10):89. https://doi.org/10.3390/agriculture7100089
Chicago/Turabian StyleSamseemoung, Grianggai, Peeyush Soni, and Pimsiri Suwan. 2017. "Development of a Variable Rate Chemical Sprayer for Monitoring Diseases and Pests Infestation in Coconut Plantations" Agriculture 7, no. 10: 89. https://doi.org/10.3390/agriculture7100089
APA StyleSamseemoung, G., Soni, P., & Suwan, P. (2017). Development of a Variable Rate Chemical Sprayer for Monitoring Diseases and Pests Infestation in Coconut Plantations. Agriculture, 7(10), 89. https://doi.org/10.3390/agriculture7100089