Application of Geographic Information System and Automated Guidance System in Optimizing Contour and Terrace Farming


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experiment and Materials
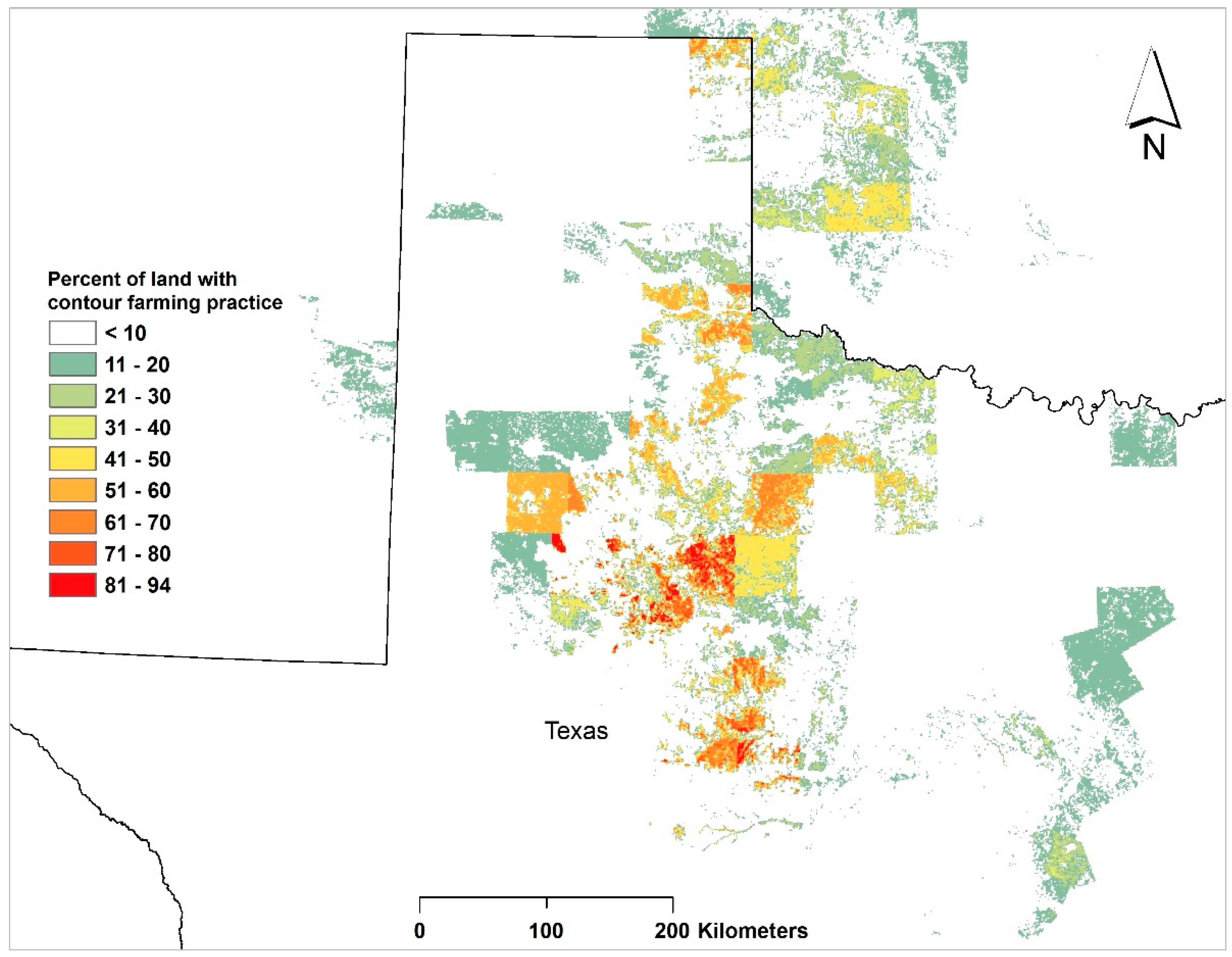
2.1. Study Area
2.2. Equipment
2.3. Software
3. Case Studies
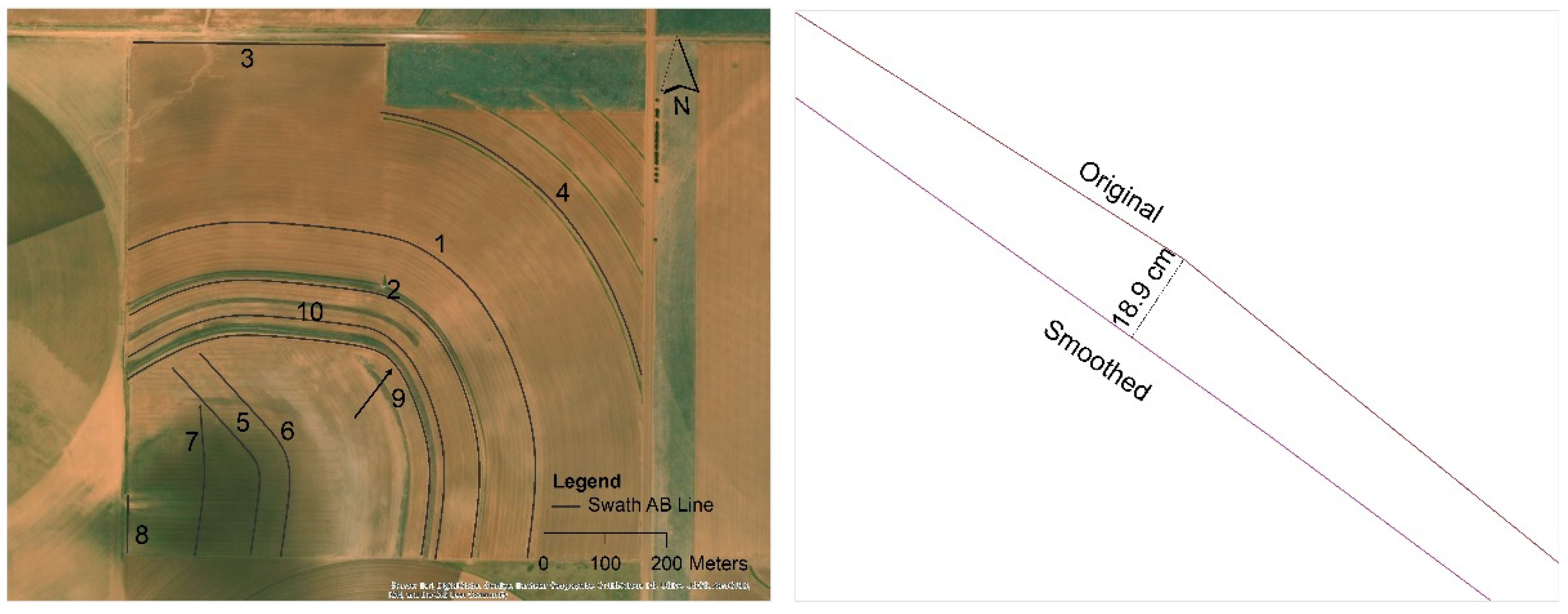
3.1. Case Study 1—Line Smoothing
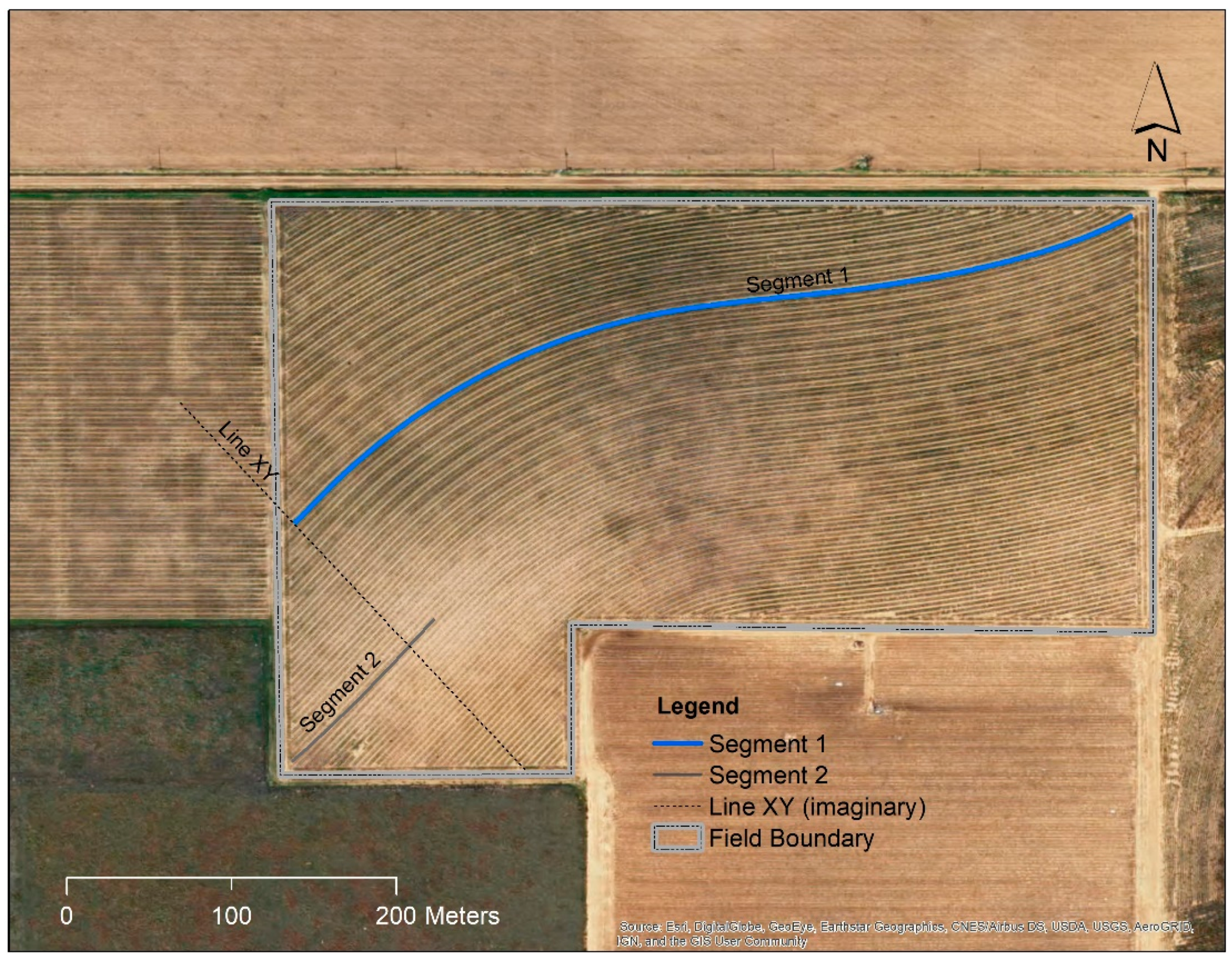
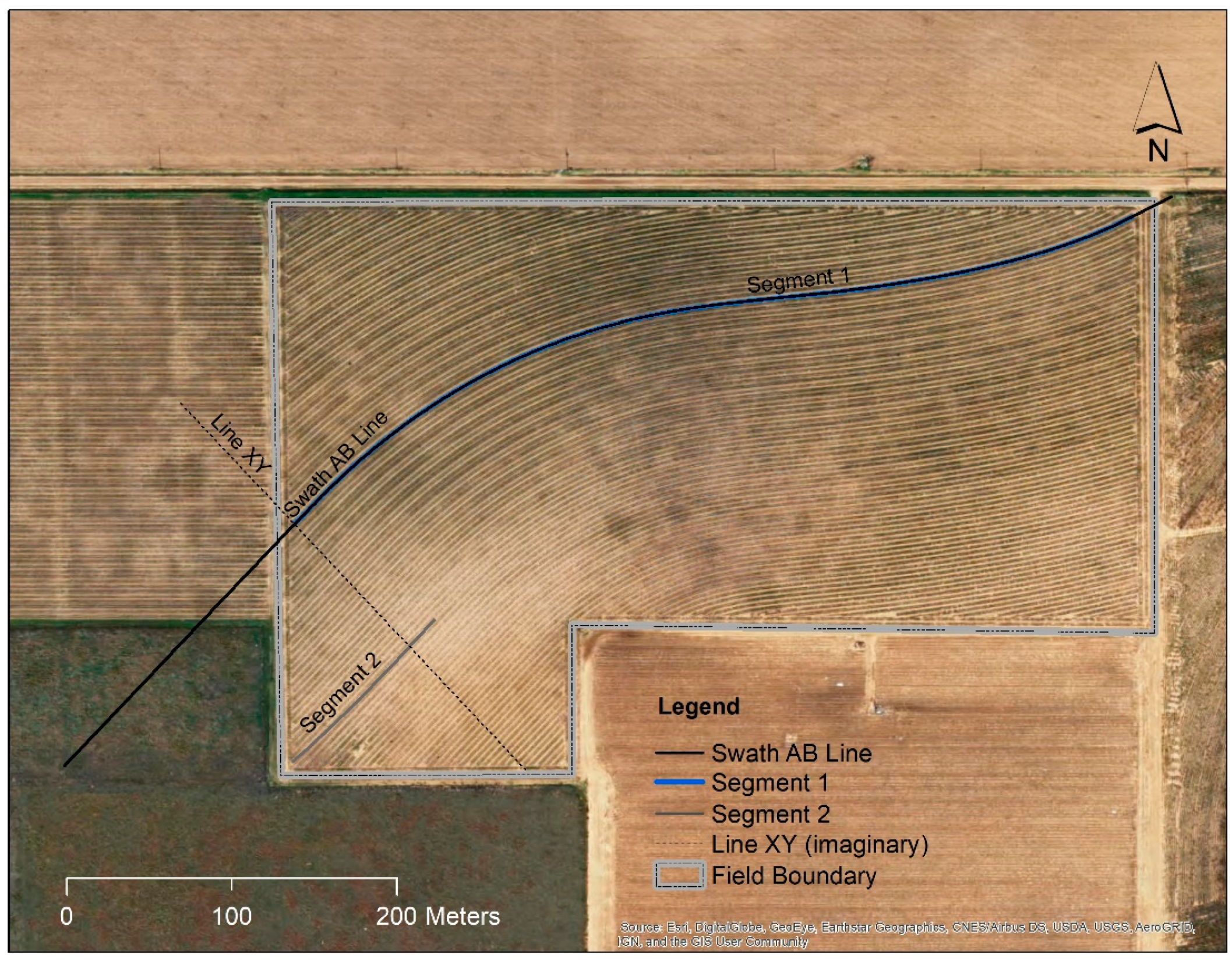
3.2. Case Study 2—Line Extension and Connection
3.3. Case Study 3—Guide-to-Lines
3.4. Case Study 4—Creating Guidance AB Lines
4. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- USDA-NRCS. Contour Farming (Ac.); USDA: Washington, DC, USA, 2007.
- USDA-NRCS. Conservation Practices Standard, Terrace (Ft.); USDA: Washington, DC, USA, 2010.
- Batte, M.T.; Ehsani, M.R. The economics of precision guidance with auto-boom control for agricultural sprayers. Comput. Electron. Agric. 2006, 53, 28–44. [Google Scholar] [CrossRef]
- Guo, W.; Maas, S.J. Terrace layout design utilizing geographic information system and automated guidance system. Appl. Eng. Agric. 2012, 28, 31–38. [Google Scholar] [CrossRef]
- Gan-Mor, S.; Clark, R.L. DGPS-based automatic guidance—Implementation and economical analysis 2001. In Proceedings of the 2001 American Society of Agricultural and Biological Engineers Annual Meeting, Sacramento, CA, USA, 29 July–1 August 2001. [Google Scholar]
- Long, D.S.; Wuest, S.B.; Williams, J.D.; Rauwendall, R.; Bailey, M.J. Contour planting: A strategy to reduce soil erosion on steep slopes. In Proceedings of the International Conference on Precision Agriculture Abstracts and Proceedings, Denver, CO, USA, 18–21 July 2010. [Google Scholar]
- Sørensen, C.G.; Bochtis, D.D. Conceptual model of fleet management in agriculture. Biosyst. Eng. 2010, 105, 41–50. [Google Scholar] [CrossRef]
- Conesa-Muñoz, J.; Bengochea-Guevara, J.M.; Andujar, D.; Ribeiro, A. Route planning for agricultural tasks: A general approach for fleets of autonomous vehicles in site-specific herbicide applications. Comput. Electron. Agric. 2016, 127, 204–220. [Google Scholar] [CrossRef]
- Poncet, A.; Fulton, J.; Port, K.; McDonald, T.; Pate, G. Optimizing Field Traffic Patterns to Improve Machinery Efficiency: Path Planning Using Guidance Lines. Available online: https://ohioline.osu.edu/factsheet/fabe-5531 (accessed on 9 September 2018).
- Pamucar, D.; Ćirović, G. Vehicle route selection with an adaptive neuro fuzzy inference system in uncertainty conditions. Decis. Making Appl. Manag. Eng. 2018, 1, 13–37. [Google Scholar] [CrossRef]
- Rikalović, A.; Soares, G.A.; Ignjatić, J. Spatial analysis of logistics center location: A comprehensive approach. Decis. Mak. Appl. Manag. Eng. 2018, 1, 38–50. [Google Scholar] [CrossRef]
- Earl, R.; Thomas, G.; Blackmore, B.S. Potential role of GIS in autonomous field operations. Comput. Electron. Agric. 2000, 25, 107–120. [Google Scholar] [CrossRef]
- De Bruin, S.; Lerink, P.; Klompe, A.; van der Wal, T.; Heijting, S. Spatial optimisation of cropped swaths and field margins using GIS. Comput. Electron. Agric. 2009, 68, 185–190. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Vougioukas, S.G. Minimising the non-working distance travelled by machines operating in a headland field pattern. Biosyst. Eng. 2008, 101, 1–12. [Google Scholar] [CrossRef]
- Hameed, I.A.; Bochtis, D.D.; Sørensen, C.G.; Nøremark, M. Automated generation of guidance lines for operational field planning. Biosyst. Eng. 2010, 107, 294–306. [Google Scholar] [CrossRef]
- Holliday, V.T. Soils and landscape evolution of eolian plains: The Southern High Plains of Texas and New Mexico. Geomorphology 1990, 3, 489–515. [Google Scholar] [CrossRef]
- Livingston, R.B. Relict true prairie communities in central Colorado. Ecology 1952, 33, 72–86. [Google Scholar] [CrossRef]
- Colaizzi, P.D.; Gowda, P.H.; Marek, T.H.; Porter, D.O. Irrigation in the Texas High Plains: A brief history and potential reductions in demand. Irrig. Drain. 2009, 58, 257–274. [Google Scholar] [CrossRef]
- Tucker, K.; Feagley, S. The Impacts of Furrow Diking, Terracing, and Contour Cultivation on Water Conservation in Texas Agriculture; SCS Report; Texas Agricultural Extension Service, Texas A&M University: College Station, TX, USA, 1998. [Google Scholar]
- U.S. Geological Survey. Contour Farming on Agricultural Land in the Conterminous United States, 1992: National Resource Inventory Conservation Practice 330; USDA: Washington, DC, USA, 1995.
- Sickle, J.V. GPS for Land Surveyors, 2nd ed.; Taylor and Francis: New York, NY, USA, 2001. [Google Scholar]
- Tamura, Y.; Matsui, M.; Pagnini, L.G.; Ishibashi, R.; Yoshida, A. Measurement of wind-induced response of buildings using RTK-GPS. J. Wind Eng. Ind. Aerod. 2002, 90, 1783–1793. [Google Scholar] [CrossRef] [Green Version]
- Bolstad, P. GIS Fundamentals: A First Text on Geographic Information Systems, 3rd ed.; Eider Press: White Bear Lake, MN, USA, 2008. [Google Scholar]
- Guilbert, E.; Lin, H. Isobathymetric line simplification with conflict removal based on a B-spline snake model. Mar. Geod. 2007, 30, 169–195. [Google Scholar] [CrossRef]









© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, W. Application of Geographic Information System and Automated Guidance System in Optimizing Contour and Terrace Farming. Agriculture 2018, 8, 142. https://doi.org/10.3390/agriculture8090142
Guo W. Application of Geographic Information System and Automated Guidance System in Optimizing Contour and Terrace Farming. Agriculture. 2018; 8(9):142. https://doi.org/10.3390/agriculture8090142
Chicago/Turabian StyleGuo, Wenxuan. 2018. "Application of Geographic Information System and Automated Guidance System in Optimizing Contour and Terrace Farming" Agriculture 8, no. 9: 142. https://doi.org/10.3390/agriculture8090142
APA StyleGuo, W. (2018). Application of Geographic Information System and Automated Guidance System in Optimizing Contour and Terrace Farming. Agriculture, 8(9), 142. https://doi.org/10.3390/agriculture8090142