
Design of a Disc-Shaped Autonomous Underwater Helicopter with Stable Fins

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Dynamic Model of AUH
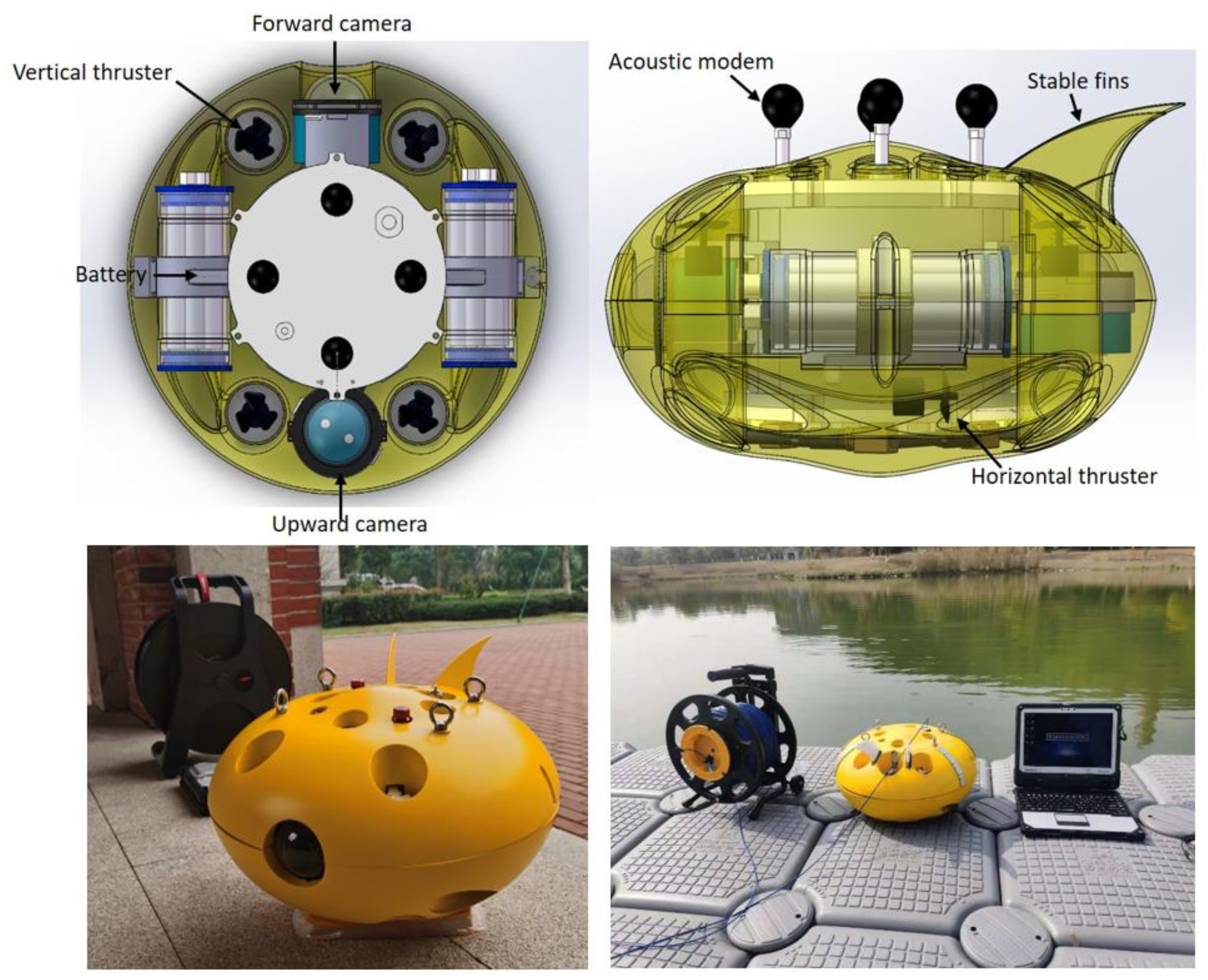
2.1. Mechanical Structure of AUH
- A multirotor configuration used six thrusters for five DOFs of the surge, heave, roll, pitch, and yaw;
- Two fins at the rear are used to make stability when moving forward.
2.2. CFD Simulation
2.3. Motion Analysis
- HeaveFour vertical thrusters 1, 2, 3, and 4 rotate simultaneously at the same speed.
- RollIncreasing the rotating speed of 1 and 2 and make = , =
- PitchIncreasing the rotating speed of 1 and 4 and make = , =
- Yaw
- SurgeIncreasing the rotating speed of 5 and 6.

2.4. Mathematical Modelling
3. Controller Design and Simulation
3.1. Controller Design
3.2. Simulation
4. Pool Experiments
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wynn, R.B.; Huvenne, V.A.I.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. J. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Hassan, O.I.H. Black-Box Identification and Control for Autonomous Underwater Vehicles. Ph.D. Thesis, School of Engineering and Information Technology, The University of New South Wales, Sydney, Australia, Australian Defence Force Academy, Canberra, Australia, 2013. Available online: http://handle.unsw.edu.au/1959.4/52888 (accessed on 5 April 2021).
- Berget, G.E.; Fossum, T.O.; Johansen, T.A.; Eidsvik, J.; Rajan, K. Adaptive Sampling of Ocean Processes Using an AUV with a Gaussian Proxy Model. IFAC-PapersOnLine 2018, 51, 238–243. [Google Scholar] [CrossRef]
- Phillips, A.B.; Turnock, S.R.; Furlong, M. The use of computational fluid dynamics to aid cost-effective hydrodynamic design of autonomous underwater vehicles. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2010, 224, 239–254. [Google Scholar] [CrossRef]
- Zhang, C. The Design and Motion Control of Round Dish-Shaped Underwater Vehicle. Master’s Thesis, Harbin Engineering University, Harbin, China, 2013. [Google Scholar]
- Ji, D.; Chen, C.W.; Chen, Y. Autonomous Underwater Helicopters AUV with Disc-Shaped Design for Deepwater Agility. SEA Technol. 2018, 59, 25–27. [Google Scholar]
- Carreras, M.; Hernandez, J.D.; Vidal, E.; Palomeras, N.; Ribas, D.; Ridao, P. Sparus II AUV—A Hovering Vehicle for Seabed Inspection. IEEE J. Ocean. Eng. 2018, 43, 344–355. [Google Scholar] [CrossRef]
- Singh, H.; Can, A.; Eustice, R.; Lerner, S.; McPhee, N.; Roman, C. Seabed AUV offers new platform for high-resolution imaging. Eos 2004, 85, 289–296. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.; Huang, Y.; Zhu, H.; Huang, H.; Chen, Y. Simulation study on the hydrodynamic resistance and stability of a disk-shaped autonomous underwater helicopter. Ocean Eng. 2021, 219, 108385. [Google Scholar] [CrossRef]
- Niewiadomska, K.; Jones, C.; Webb, D. Design of a mobile and bottom resting autonomous underwater gliding vehicle. In Proceedings of the 13th International Symposium on Unmanned Untethered Submersible Technology (UUST 2003), Durham, NH, USA, 1 January 2003. [Google Scholar]
- Nakamura, M.; Ito, Y.; Koterayama, W.; Masaru, I.; Joshiro, N.; Kenji, M.; Hisao, K.; Takashi, A.; Yutaka, Y.; Hiroyuki, O. Development of Disk Type Underwater Glider for Virtual Mooring-Part 3, Construction of Prototype Vehicle and Field Experiments. J. Jpn. Soc. Nav. Archit. Ocean. Eng. 2013, 18, 157–166. [Google Scholar]
- Nakamura, M.; Hyodo, T.; Koterayama, W. “LUNA” testbed vehicle for virtual mooring. In Proceedings of the Seventeenth International Offshore and Polar Engineering Conference, Lisbon, Portugal, 1–6 July 2007. [Google Scholar]
- Yu, P.; Wang, T.; Zhou, H.; Shen, C. Dynamic modeling and three-dimensional motion simulation of a disk type underwater glider. Int. J. Nav. Arch. Ocean Eng. 2018, 10, 318–328. [Google Scholar] [CrossRef]
- An, X.; Chen, Y.; Huang, H. Parametric Design and Optimization of the Profile of Autonomous Underwater Helicopter Based on NURBS. J. Mar. Sci. Eng. 2021, 9, 668. [Google Scholar] [CrossRef]
- Chen, C.-W.; Wang, T.; Feng, Z.; Lu, Y.; Huang, H.; Ji, D.; Chen, Y. Simulation research on water-entry impact force of an autonomous underwater helicopter. J. Mar. Sci. Technol. 2020, 25, 1166–1181. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, X.; Huang, H.; Chen, Y. Development of an Autonomous Underwater Helicopter with High Maneuverability. Appl. Sci. 2019, 9, 4072. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Zhang, M.; Chen, J.; Yin, B. Trajectory tracking with quaternion-based attitude representation for autonomous underwater vehicle based on terminal sliding mode control. Appl. Ocean Res. 2020, 104, 102342. [Google Scholar] [CrossRef]
- Luukkonen, T. Modelling and control of quadcopter. Independent research project in applied mathematics. Espoo 2011, 22, 22. [Google Scholar]
- Titterton, D.; Weston, J.L.; Weston, J. Strapdown Inertial Navigation Technology, 2nd ed.; The Institution of Engineering and Technology: London, UK, 2004; p. 574. [Google Scholar]
- Chen, C.-W.; Jiang, Y.; Huang, H.-C.; Ji, D.-X.; Sun, G.-Q.; Yu, Z.; Chen, Y. Computational fluid dynamics study of the motion stability of an autonomous underwater helicopter. Ocean. Eng. 2017, 143, 227–239. [Google Scholar] [CrossRef]
- Prouty, R.W. Helicopter Performance, Stability, and Control; Krieger Pub Co.: Malabar, FL, USA, 1995. [Google Scholar]
- Yang, C. Research on Modeling and Flight Control Technology of Multi-Rotor Aircraft. Ph.D. Thesis, NanJing University of Aeronautics and Astronautics, Nanjing, China, 2013. [Google Scholar]
- Slotine, J.J.; Sastry, S.S. Tracking control of nonlinear systems using sliding surfaces, with application to robot manipulators. Int. J. Control. 1983, 38, 465–492. [Google Scholar] [CrossRef] [Green Version]




















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, P.; Huang, S.H.; Yang, W.; Wang, Y.; Wang, Z.; Hu, R.; Chen, Y. Design of a Disc-Shaped Autonomous Underwater Helicopter with Stable Fins. J. Mar. Sci. Eng. 2022, 10, 67. https://doi.org/10.3390/jmse10010067
Du P, Huang SH, Yang W, Wang Y, Wang Z, Hu R, Chen Y. Design of a Disc-Shaped Autonomous Underwater Helicopter with Stable Fins. Journal of Marine Science and Engineering. 2022; 10(1):67. https://doi.org/10.3390/jmse10010067
Chicago/Turabian StyleDu, Peizhou, S. H. Huang, Wencheng Yang, Yingqiang Wang, Zhikun Wang, Ruoyu Hu, and Ying Chen. 2022. "Design of a Disc-Shaped Autonomous Underwater Helicopter with Stable Fins" Journal of Marine Science and Engineering 10, no. 1: 67. https://doi.org/10.3390/jmse10010067