3.1. Numerical Model Set-Up
OpenFOAM® 1712 was used in this study to set up the numerical model. OceanWave3D coupled with the waves2Foam toolbox developed by Jacobsen et al. [
15] was used to generate the same waves in the numerical model as those in the physical model tests. Detailed information about the coupling approach can be found in Paulsen et al. [
20]. The movement of the wave paddle at the Deltares Delta flume is controlled by a steering file that describes the movement of the wave paddle to generate the wave time series. The steering files were used to translate the movement of the wave paddle into the OpenFOAM® model using OceanWave3D [
21]. Since the Grassblocks that were used in this study are permeable, the Volume-averaged Reynolds-averaged Navier–Stokes (VRANS) equations were solved using the porousWaveFoam solver [
18], which is included in the waves2Foam toolbox using the resistance coefficients
and
(see
Appendix A).
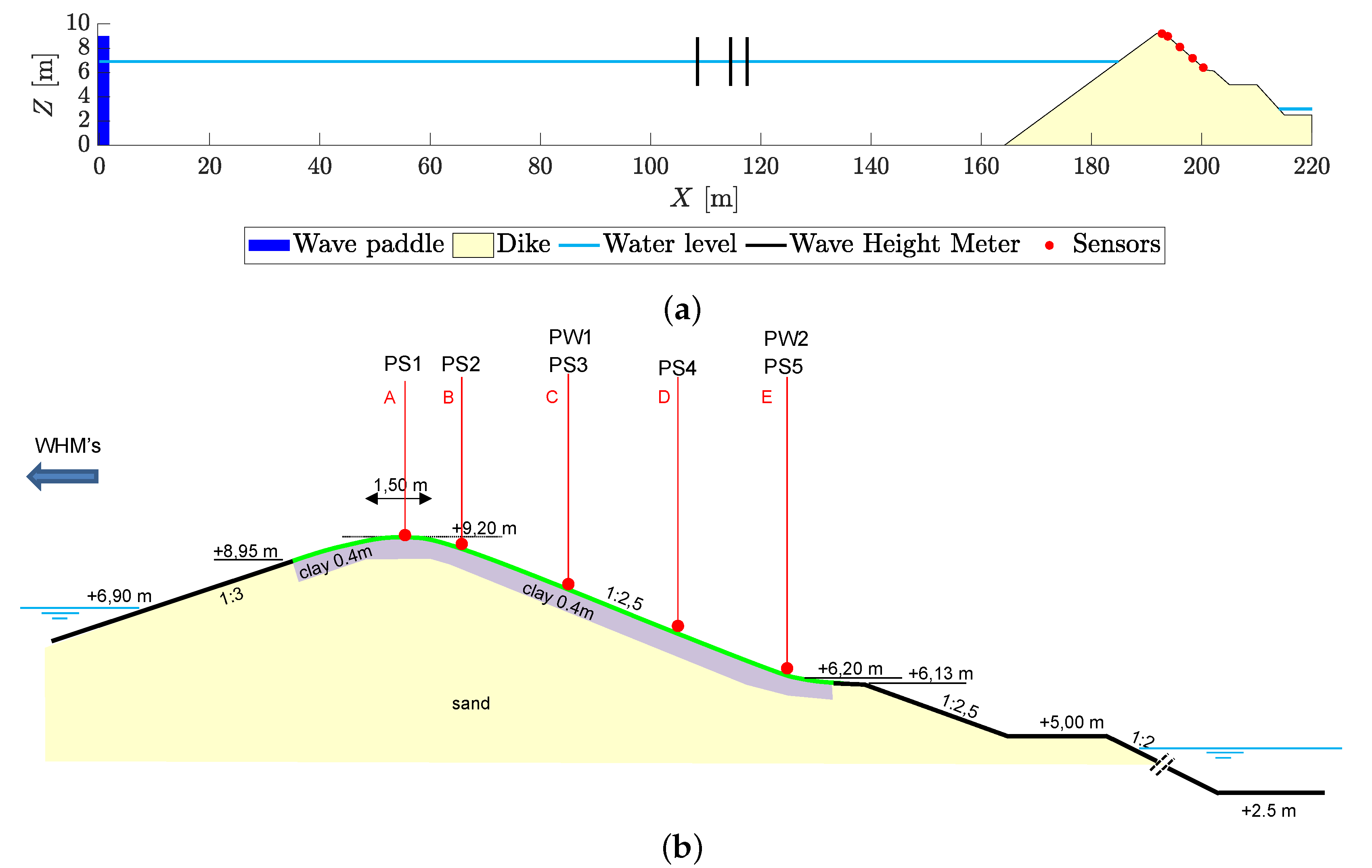
The dike geometry was implemented into the OpenFOAM® model using blockMesh (
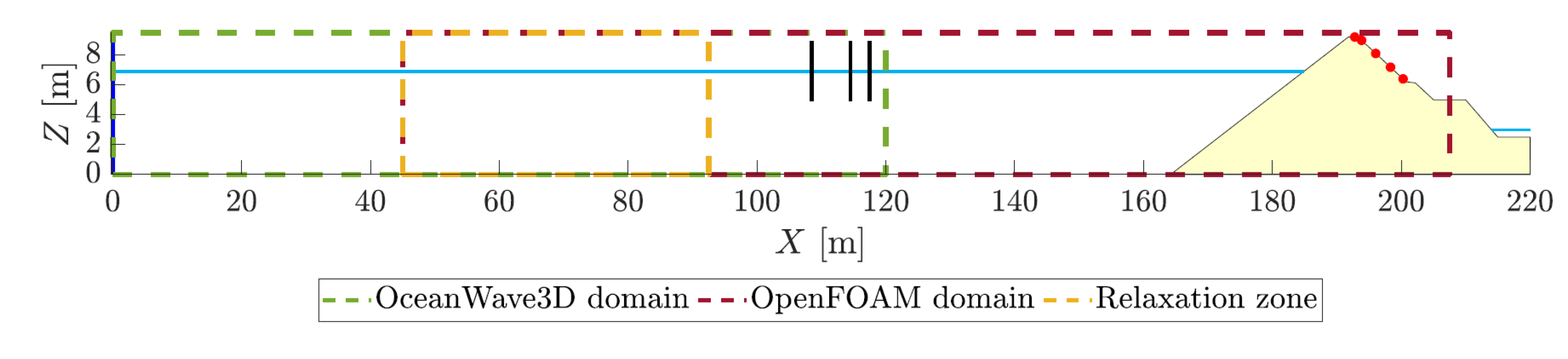
Figure 5). The flume in the numerical model starts at
m away from the wave generator up to 206 m with a height of
m. The relaxation zone avoids internally reflecting waves at the wave generating boundary of the numerical model. The length of the relaxation zone was set as close to one wavelength [
22].
According to Jacobsen et al. [
15] and Pedersen et al. [
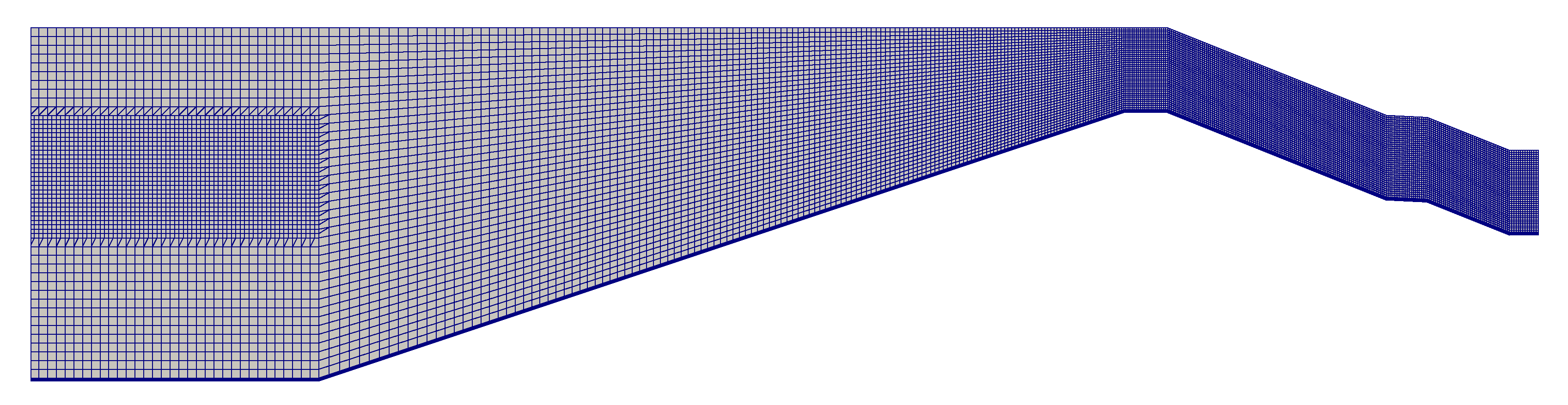
23], maintaining an aspect ratio of
throughout the computational domain improves the accuracy and numerical stability of the model. The mesh size is 30 × 30 cm, leading to 40 cells in the vertical direction. The mesh size on the crest and landward slope is 7 × 7 cm. Similar to the research by Chen et al. [
17], a wall function was used in the boundary layer near the bottom surface of the flume. The mesh was refined near the bottom along the entire domain using 10 cells with a height of 1 cm to simulate the vertical velocity profile accurately.
Windt et al. [
24] have shown that 10 layers of cells per wave height are needed to resolve the wave height accurately. The significant wave height varies from
m up to
m. With a minimum of 10 vertical layers per wave height, this leads to a mesh size of 15 × 15 cm. Therefore, the grid was locally refined near the water surface from
–
in vertical direction and from the start of the flume until the start of the slope (
–
) in horizontal direction (
Figure 6). The maximum Courant number was set to 0.25 as Gruwez et al. [
25] showed that
led to a good balance between accuracy and computational costs.
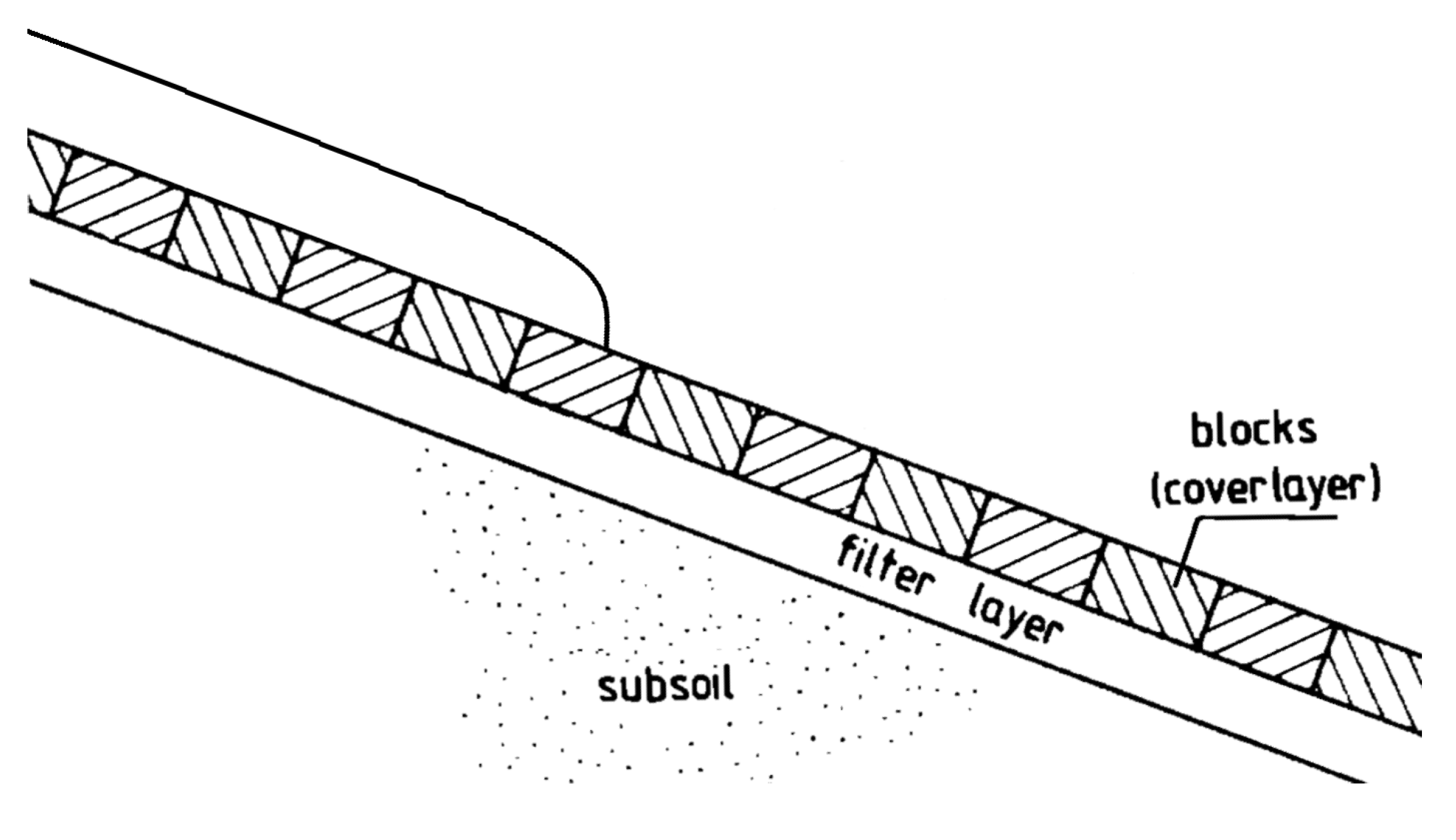
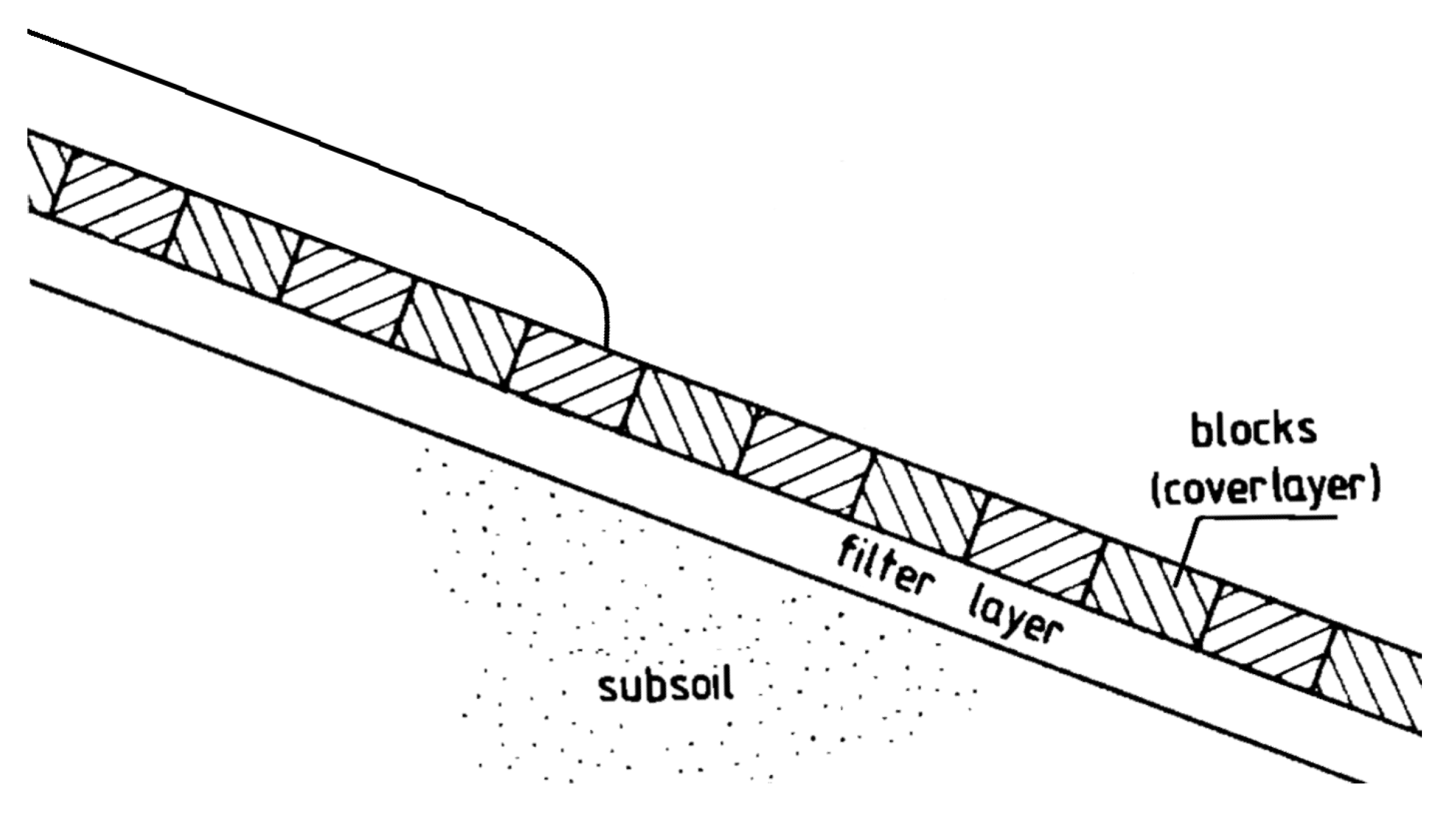
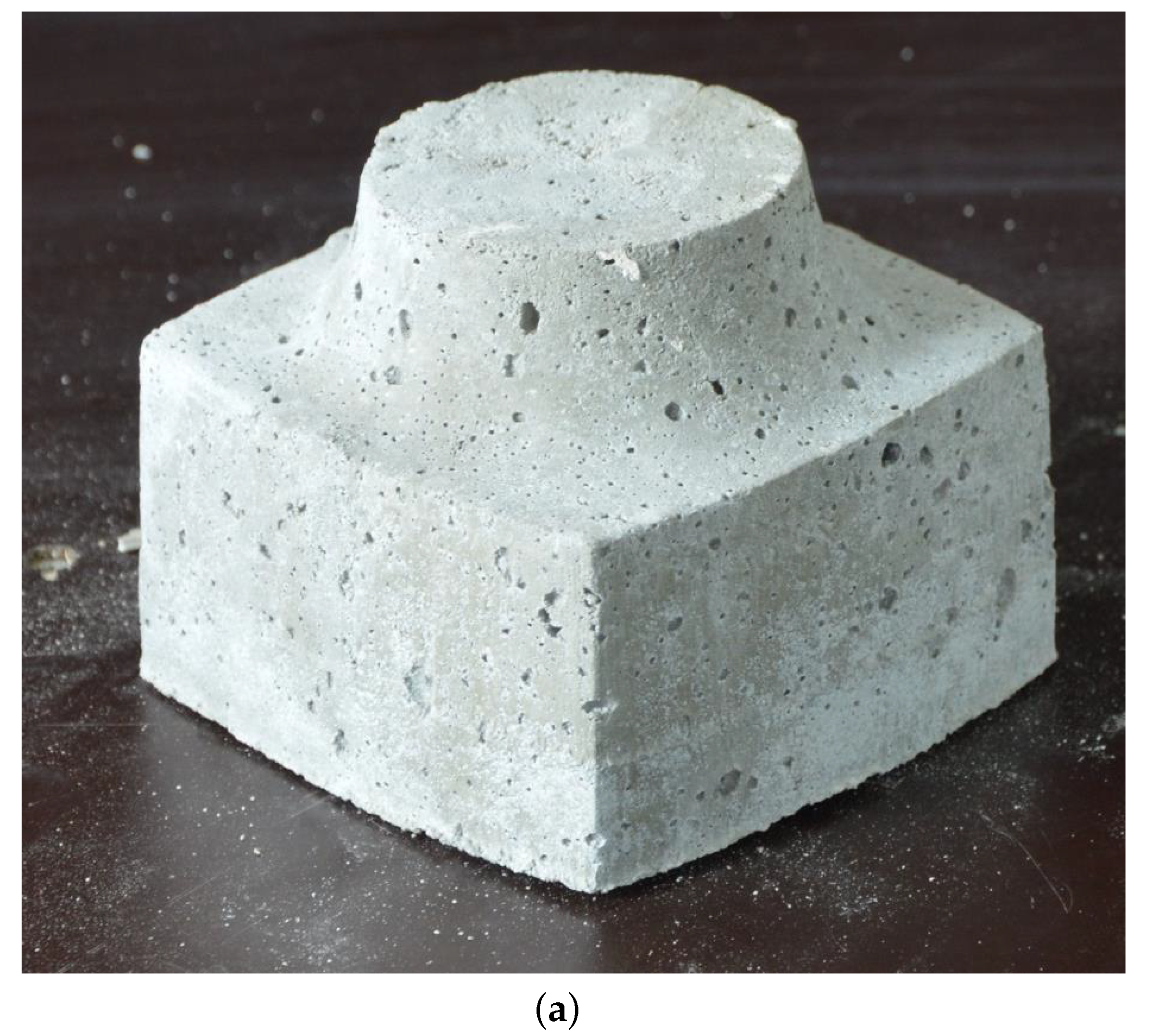
The porous zones are defined by resistance properties and were implemented into OpenFOAM® using porosityZones. The porous zone starts near the top of the waterside slope ( m, m) and ends at the toe of the landward slope ( m, m). The porous zone has a depth of 36 mm over the whole layer, which is the same height as the open top part of the Grassblocks so that only the porous part of the blocks is implemented as porous layer in the numerical model. Furthermore, the porosity of is used in the numerical model based on the ratio of void volume out of the total volume on the upper 36 mm of the Grassblock.
Van Gent [
26] proposed the resistance coefficients
and
based on measurements of the permeability during experiments with porous flows through rubble-mound material. Losada et al. [
27] showed that the resistance coefficients depend on parameters such as the Reynolds number, the shape of the stones, the grade of the porous material, and the permeability and the flow characteristics. However, the precise descriptions of the
and
coefficients are still not fully understood for oscillatory flows in wave propagation and breaking over slopes [
27]. For these conditions, the values as proposed in literature may not be valid since the experimental conditions for obtaining those formulae were not considering these effects. Based on a comparison of experimental data and numerical modelling results of wave overtopping processes (COBRAS-UC), Losada et al. [
27] proposed
and
as the best-fit parameters in his research. Furthermore, Jensen et al. [
18] compared experimental data with numerical outcomes. Based on research by Burcharth and Andersen [
28], Jensen et al. [
18] proposed that the Reynolds number in porous media
can be determined using Equation (
1).
Based on this Reynolds number, a distinction was made by Jensen et al. [
18] for different flow regimes. The first is a non-linear flow regime, also described as the Forchheimer flow regime (
). The second is an unsteady laminar flow regime, also called the transitional flow regime (
). The last one is the fully turbulent flow regime, with
. According to Jensen et al. [
18], the resistance coefficients
and
performed best considering all flow regimes.
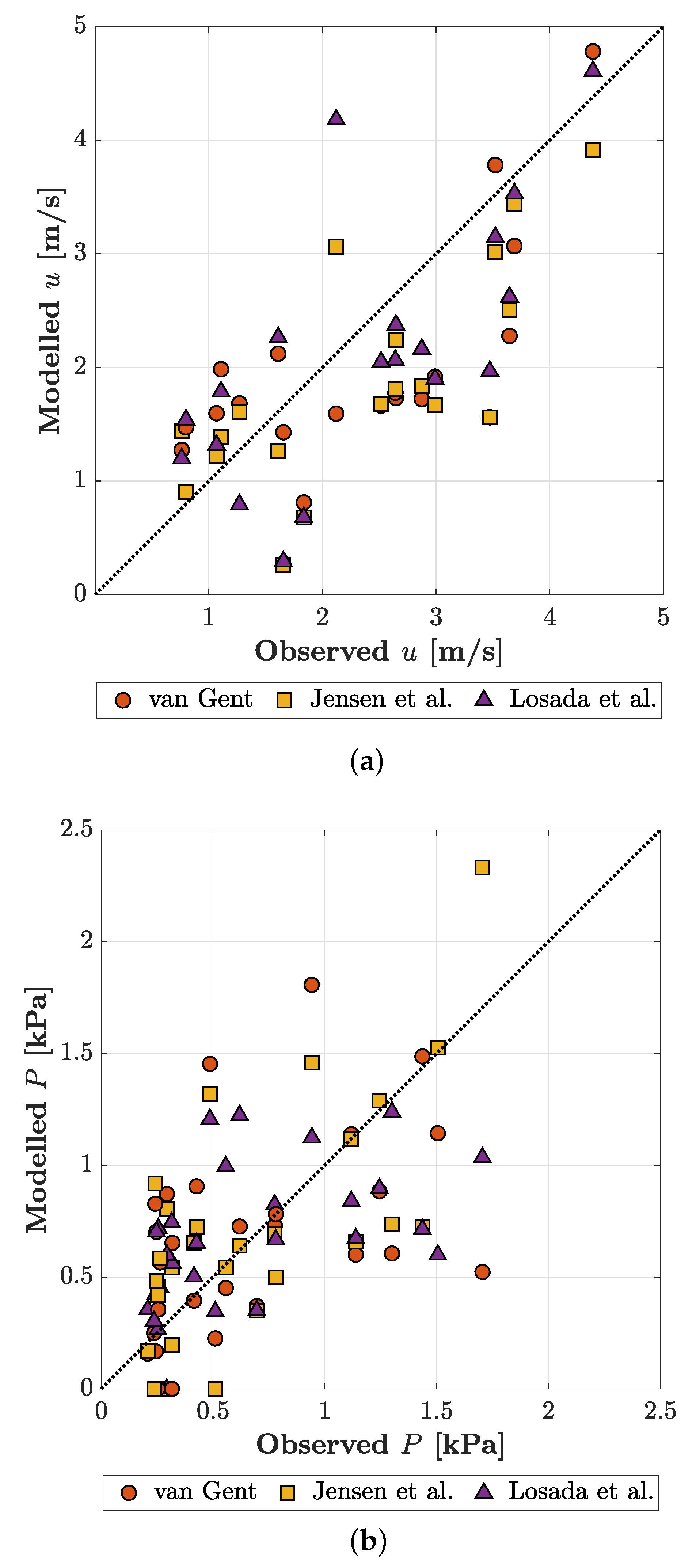
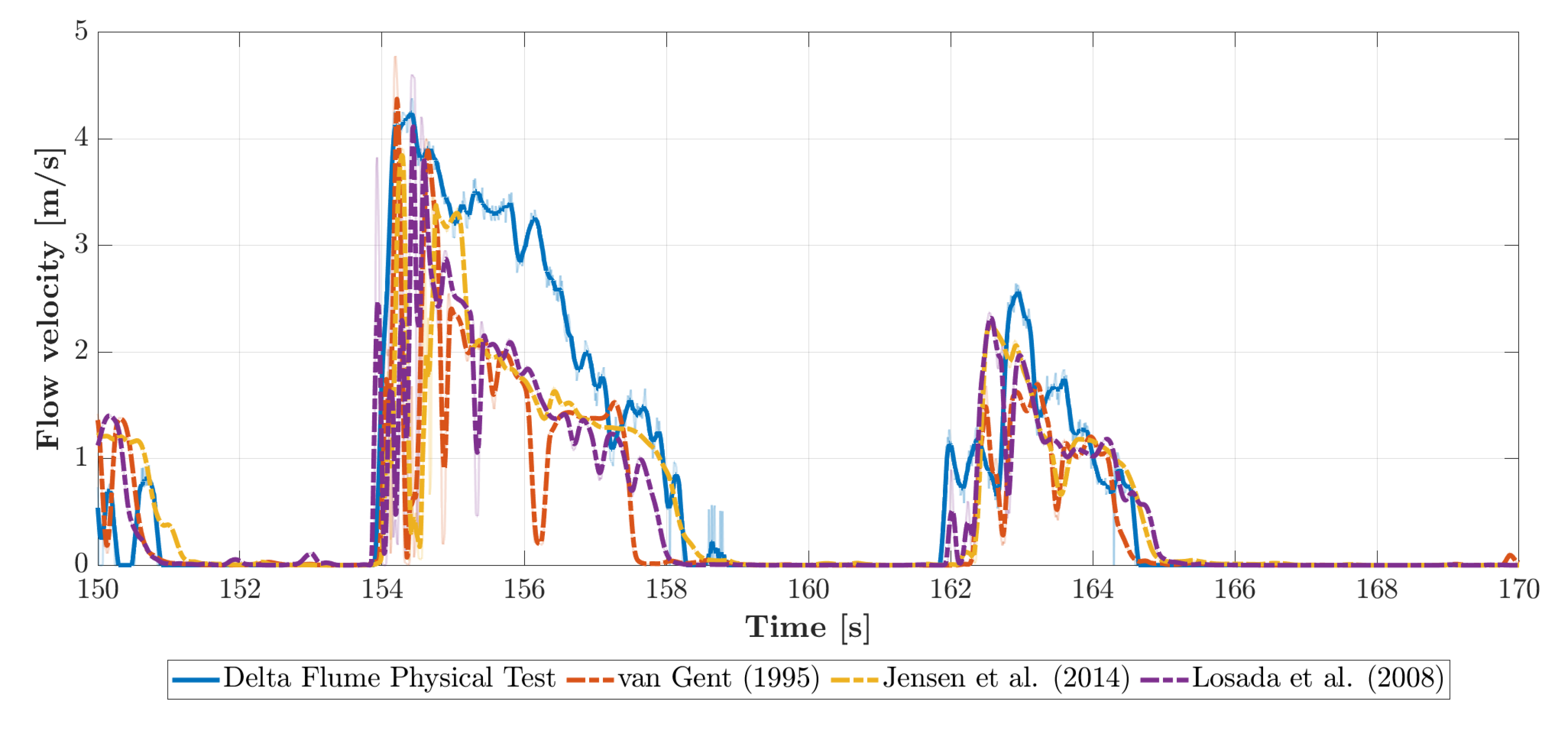
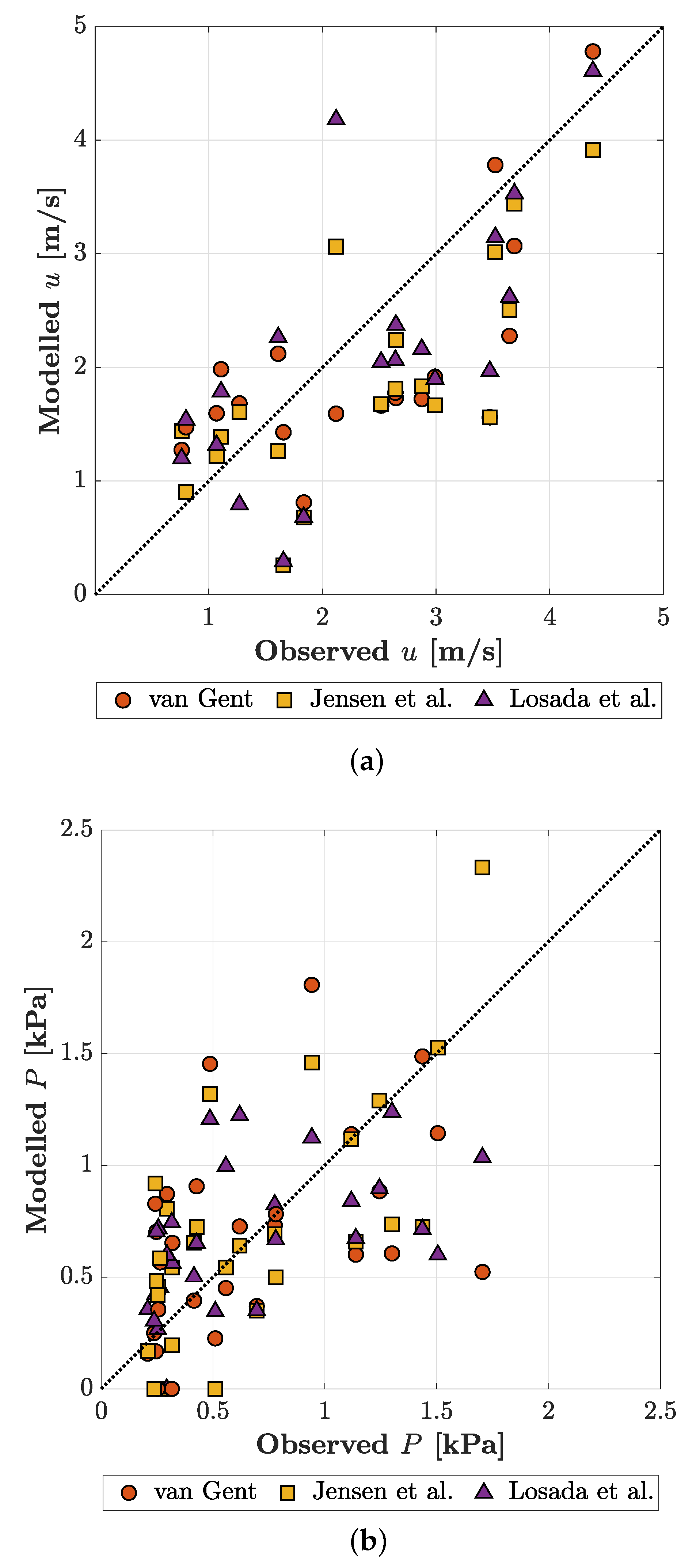
Three different sets of resistance coefficients were selected based on Van Gent [
26], Losada et al. [
27], Jensen et al. [
18] to calibrate the numerical model, as displayed in
Table 2.
Since wave breaking was observed in the physical experiments, the turbulence should be accounted for in the numerical model. The stabilised
turbulence model developed by Larsen and Fuhrman [
29] was used in this study, where
k is the turbulent kinetic energy [m
2/s
2] and
the specific rate of dissipation of turbulent kinetic energy. The
turbulence model has a stress limiter
and an effective potential flow threshold
. Larsen and Fuhrman [
29] suggested a value of
and for
either 0.2 and 0.875 is mentioned. Chen et al. [
17] showed that
performed better in a
model for wave overtopping. The stabilised
model with
and
was used in this study.
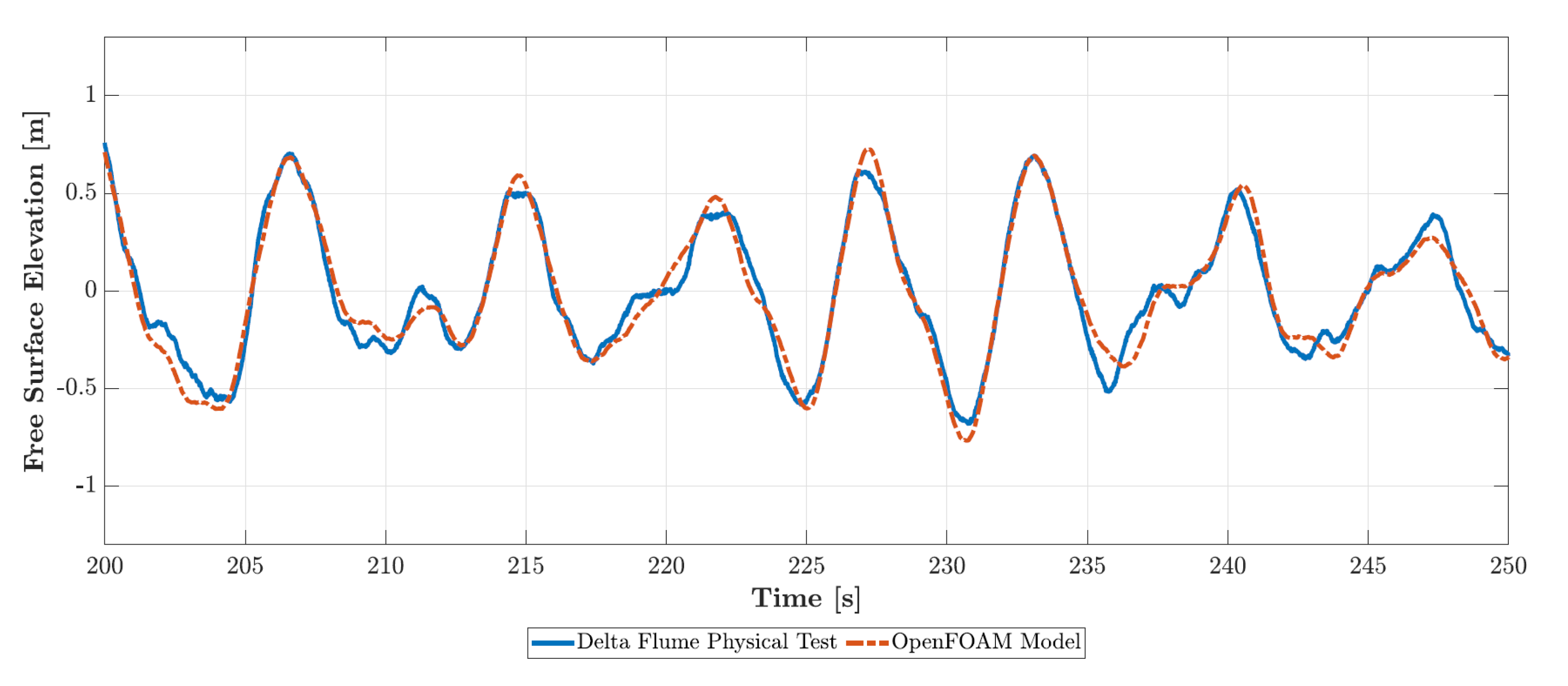
The generated waves were calibrated following the approach of Chen et al. [
17] to ensure that the modelled waves accurately represent the waves from the physical experiment. Wave height meters were defined in the numerical model at the same location as used in the physical experiment. Using the wave separation method of Mansard and Funke [
30], the spectral density of the free surface elevation was determined. Based on the
and
moment of the spectral density, the significant wave height
and spectral wave period
were obtained. The waves were then calibrated by comparing
and
of the numerical model simulated waves and the physical test waves.


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}