Abstract
The topic of the present paper subscribes to one of the most challenging themes that are nowadays under the spotlight of the scientific community. It describes a substantiated method aimed not only at predicting accurately the consequences of the associated effects of navigation in waves but also at contributing to ruling the conditions in which the operation of a ship should be performed is presented. A series of multiple degrees of freedom (DOF hereafter) simulations of the MOERI (Korea Research Institute for Ships and Ocean Engineering) container ship (KCS hereafter) hull moving in regular waves are performed and thoroughly validated with the experimental data provided by the organizers of the Tokyo 2015 Workshop on CFD in Ship Hydrodynamics. A verification and validation (V&V hereafter) is performed for the calm water navigation case to prove the robustness of the theoretical approach. Several numerical innovations are proposed, and the solutions are discussed in every detail aimed at setting up a properly established methodology usable in further similar studies. Finally, a set of remarks will conclude the present research.
1. Introduction
Actual trends in the shipbuilding industry induced by the significant fluctuations of the fuel price, as well as by the environmental impact of greenhouse gas emissions released, require a consistent effort for the optimal design of the hull forms. Aside from that, the propulsion system, which was supposed to deliver a maximum efficiency with a minimized fuel cost, became another challenge for the naval architect. Improvements in the hydrodynamic performance of a ship for reducing fuel consumption and the associated CO2 emissions have become of great importance given the relatively short term in which resilient solutions have to be found. A practical measure to quantify and regulate the CO2 emissions produced by ships has been proposed by the International Maritime Organisation (IMO hereafter), which has introduced the Energy Efficiency Design Index (EEDI), which accounts for the effective mass of CO2 emitted per unit of transport work [1,2]. EEDI became the most important tool in the design stage since it imposed additional restrictions related to the hull forms, engine, and propulsion performances as less pollutant equipment. Owing to the frighten of the recent radical climate changes, imminent conjugate efforts are therefore required to diminish the emissions whatever they are and whomever their producers may be. Under these circumstances, the present paper describes a complete procedure for computing the hydrodynamic performance of a containership moving in waves.
Resistance and powering characteristics of a ship require the simultaneous computation of the sinkage and trim of the ship with respect to the otherwise non-disturbed water surface. Seakeeping and ship response in a seaway require six degrees of freedom, which is beyond the capabilities of common numerical solvers. A variety of computational tools have been developed to compute loads and responses in waves. Even though many of the computational tools available today for ship motions are still based on potential flow solvers, there have been several successful achievements in solving viscous ship hydrodynamics with motions. Unfortunately, most of these methods still suffer because of the limitations, which restrict their application to small amplitude motions only. For that reason, more systematic studies and developments are needed.
In the past few decades, studies on seakeeping performance have been widely based on potential flow theory methods. Linear approaches [3,4] and quasi-nonlinear ones [5,6,7,8,9] as well as fully nonlinear techniques [10] have been proposed over time. In spite of their drawbacks, the potential methods are still wide because of their proven computational efficiency. Various independent computational fluid dynamics (CFD hereafter) techniques were developed, aimed at supporting the hull form optimal design. Both unpropelled [5,11,12] and self-propelled hulls [13,14,15] were considered and some encouraging results have been reported. Most of the methods were based on the solution of the Reynolds-averaged Navier–Stokes equations (RANSE hereafter), [16,17], in which closure to turbulence has basically been achieved by employing the model [18]. Following the rapid progress in computer hardware, those techniques have been extended and more sophisticated turbulence models such as DES and DDES have been developed [19,20,21,22]. In spite of the higher computational costs, their capability of reproducing accurately the local flow features makes those approaches very attractive in the very near future.
Aside from all those mentioned above, it has been found that since the arbitrary sea states can be rather well reproduced in the numerical simulation, an accurate description of the hull response becomes possible, regardless of the navigation conditions. When advancing through a severe sea condition, the ship can experience large amplitude motions associated with the occurrence of rarely occurring events, which are mainly categorized into slamming, green water, and propeller emergence [23,24]. All these behaviors can lead to ship damage, structural strength issues, fatigue failure, and even capsizing. Therefore, the accurate estimation of ship seakeeping performances is essential for the ship designers to ensure better and safer performance in actual operation. A lower steaming in adverse seas or a change of the ship’s course might be the ultimate solution for the reduction of the added resistance, accepting all the additional involved costs. Knowing that the loading conditions are constantly changing, i.e., the mass and mass moment of inertia, draft, and trim, and so on, [25,26,27,28], one may legitimately raise a question on the optimal moment the crew may decide this and for how long their decision should last.
From all those briefly evoked above, it may be concluded that the topic of the present paper, which subscribes to one of the most challenging subjects under the spot of the scientific community, deserves to receive particular attention. Given the complexity of the subject, a robust method of parallel computation based on an overset implementation is required to perform routine calculations on a real ship geometry with acceptable run times for a routine design activity. That is the reason for initiating the research that aims at tailoring a credible and robust numerical method aimed at substituting the huge amount of the experimental work whose costs are prohibitive.
The present research represents a continuation of a comprehensive series of studies, which have treated almost all the problems a naval architect is usually faced with, such as the bare hull ship resistance in calm water and self-propulsion performances or roll motion decay in calm water [29] or navigation in head seas [30] and precedes a study of the maneuverability in both calm water and waves, which will be reported later. Since the Tokyo 2015 Workshop on CFD in Ship Hydrodynamics provided extensive experimental data, wholly accepted by the naval architecture community, see [31,32,33], they are the only used for validating the reported numerical solutions in the present research.
Summing up, the paper proposes several novel approaches to fit the overall purpose. An overset mesh technique is used to solve the complexity of the hull-incoming wave interaction. Then, the free-surface definition is carried out on an adaptive mesh refinement based on the pressure Hessian criterion. Last, but not least, a hybrid RANS-LES turbulence model is used to close the set of differential equations of motion to accurately capture the characteristics of the local flow in the relevant areas of the fluid domain. All the flow cases proposed in the 2.11 case of the Tokyo 2015 Workshop on CFD in Ship Hydrodynamics [33,34] are considered here for the validation of the proposed methodology. For the sake of consistency, the solutions were preceded in a previous work [30] by a validation with the experimental data provided by FORCE for the 2.10 case in [33].
2. Hull Geometry, Computational Domain, and Mesh Particularities
The KCS hull appended with a suspended rudder and a bulwark placed on the forecastle to prevent the eventual green water boarding, as shown in Figure 1, is considered in the present study. The containership hull was conceived to provide data for both explication of flow physics and CFD validation for a modern container ship with a bulbous bow. The Korea Research Institute for Ships and Ocean Engineering (MOERI, formerly KRISO) performed towing tank experiments to obtain resistance, mean flow data, and free-surface waves [35,36]. Self-propulsion tests were carried out at the National Maritime Research Institute in Tokyo and reported in the Proceedings of the CFD Workshop Tokyo in 2005 [37]. Later, resistance tests were also reported by NMRI. For details, refer to Larsson et al. [38]. Data for pitch, heave, and added resistance are available from Force Danish Maritime Institute measurements reported by Simonsen et al. [39]. The main particulars of the model are tabulated in Table 1.

Figure 1.
KCS hull geometry.

Table 1.
Main particulars of the ship hull.
For the given main particulars, the dimensions of the computational domain reported to the length between perpendiculars ( in Table 1) were set differently for each computational attitude depending on the wave direction. As for a seakeeping numerical simulation with the ISIS-CFD solver, the code authors recommend a simulation over at least 10–15 wavelengths in the present study. A series of trial computations performed by the author has proven that 25 wavelengths are better to be considered for the solutions to safely obtain well-converged and robust solutions. The price paid for this was reflected by the higher computational times, amounting to dozens of physical days depending on the complexity of the problem and the number of processors used for the simulation. Since the problem undertaken in the present study may presumably face an undesirable numerical wave-reflection problem, wave-damping zones have been placed along the opposite boundaries of the wave propagation directions. In the following, the computational domain is reported to a Cartesian system of coordinates, in which the and directions correspond to the axes aligned with the center line of the ship and to the lateral direction in the head wave case.
In all the simulations reported here, for hulls advancing in head or bow seas, the domain size was chosen as follows: at the upstream of the bow, at the downstream of the hull aft perpendicular to which is additionally considered for the damping zone. In the lateral direction, are prescribed on each board. In the vertical direction, above the undisturbed water surface and beneath it are chosen. For the particular cases of the following: beam and quartering waves, a damping zone with a length of three wavelengths has been provided to completely absorb the waves. Additionally, forced layers have also been added at the sides of the domain with a thickness of . All the other dimensions were kept unchanged. For the particular case of the bow sea computations, an additional refinement is made with an internal surface shaped by using Kelvin angles within which the vertical cell size and the aspect ratio were chosen so that the wake could be properly captured.
An overset mesh technique shown in Figure 2a has been used to treat properly the interaction between the incoming wave and the hull. The background grid has been generated such that only the global restrictions can be satisfied. Inside of it, an overlapping grid shown in Figure 2b has been generated such that the area of overlap contains at least four grid cells, as required by any second-order numerical scheme such as the one used in the present research.
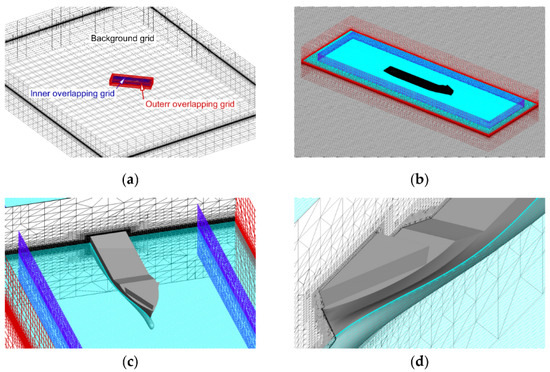
Figure 2.
Overset computational mesh. (a) Global view of the computational domain; (b) global view of the inner computational domain; (c) close-up view of the overlapping inner domain; (d) close-up view of the inner mesh around the hull.
Heavy clustering areas of mesh cells were placed around the free-surface initial position and next to the hull surface, as Figure 2c,d show. Several computational grids were generated to host the numerical solutions reported here. Their sizes varied from 44 million cells in the simplest flow case to more than 60 million cells in the most complex ones, as it will be shown in the following. The discretization resolution depended not only on the computational attitude, but also varied as a function of the wavelength, wave height and wave period particulars.
When the head and bow wave cases are simulated, the standard refinement levels and diffusion used for meshing in any ship resistance computation are used for the ship hull. Aside from that, two different volumetric refinements are used for the above navigation conditions. The first one is defined inside the region where the waves and wake need to be captured accurately, whereas the second is placed behind the hull to coarsen the mesh in the wake of the hull to the end of the domain. The cell size in the first refinement volume was imposed so that a minimum of 100 cells should lay per wavelength, whereas a minimum of 25 cells per wave height were placed in the vertical direction, depending on each particular simulation case. More details are provided in [29].
3. Numerical Approach
The ISIS-CFD flow solver, part of the FineTM/Marine suite of Cadence Design Systems, Inc., is used to integrate the unsteady equations of motion. The solver is based on a finite volume method to build the spatial discretization of the transport equations on unstructured grids. The face-based method is generalized to a three-dimensional unstructured mesh composed of arbitrary shapes. Numerical fluxes are reconstructed on mesh faces by using the AVLSMART version of the SMART (Sharp and Monotonic Algorithm for Realistic Transport) bounded difference scheme, Przulj et al. [40], which is based on the third order Quadratic Upstream Interpolation for Convective Kinematics (QUICK) scheme [41]. A centered scheme is used for the diffusion terms, while for the convective fluxes, the Gamma differencing scheme is used. Through a normalized variable diagram technique described in [42], the numerical scheme enforces the fulfillment of local monotony and convection boundedness restrictions. The velocity field is obtained from the momentum conservation equation while the pressure field is extracted from the mass conservation condition, which is transformed into a pressure equation. A second-order accurate three-level fully implicit time discretization is used, and surface and volume integrals are evaluated using a second-order accurate approximation scheme. The numerical schemes for turbulence and momentum are of a blended type with a level of upwinding of 0.1.
The free-surface is computed based on the VOF technique to capture the air-water interface based on the blended interface capturing scheme with reconstruction (BRIC). For turbulent flows, additional transport equations are discretized and solved using the same principles. Closure to the turbulence is achieved by using the hybrid DES model, although in a previous work of the present author [15] it has been found that the EASM turbulent model provided reliable results. The rationale behind the choice regards a further development of the present methodology to the numerical investigation of the self-propulsion in waves, eventually during maneuvers when accurate turbulence modeling is of crucial importance.
Aside from that, in certain working attitudes, the green water load may occur, and its accurate prediction is required since it may cause damage to the deck equipment and superstructure. Obviously, a better numerical model has to be tested in every detail to account for a proper description of the wake structure as well as for a correct air-water interface description, wherever the turbulent character of the flow becomes significant. Based on all those above mentioned, the DES model, which is based on an implicit splitting of the computational domain into two zones, has been chosen. Inside the regions adjacent to the ship hull and wherever the turbulent length scale is less than the maximum grid dimension, the flow is solved based on the K-ω SST model. On the opposite, if the turbulent length scale exceeds the grid dimension, the model switches to a subgrid scale formulation, and the flow is solved using the LES model. The DES approach is based on an implicit splitting of the computational domain into two zones. In the region near solid walls, the conventional RANS equations are solved, whereas, inside the second region, the governing equations are the filtered N-S equations of the LES approach. Since the hybrid nature of DES is not linked to any specific turbulence model, the one employed here is a variant based on the SST model. More details on the DES model are given in [43]. The numerical simulation comprises a series of three different runs. The first run, which includes the ship’s acceleration from rest to the nominal velocity, is based on the SST turbulence model of Menter [18]. The acceleration period was five s, within which the flow was accelerated based on a half-sinusoidal ramp. Once the solution is stable, the simulation is restarted with the DES model until the stability of the signal is restored. Finally, the computation is restarted again for the mean values of variables to be saved.
In all CFD, the initial and boundary conditions are defined depending on the features of the problem to be solved. The determination of these boundary conditions is of critical importance in obtaining accurate solutions. In terms of fluid properties, the fresh water and air dynamic viscosity and density were defined according to the database of the ITTC standards for the two fluids at a temperature of 21.5 °C in all the simulations reported here. For hulls advancing in the bow or head seas, the wave generator equation for the periodic variation of velocity is imposed at the inlet. The velocity is always imposed at the ship’s center of gravity, regardless of the flow scenario, i.e., the relative position of the ship’s centerline and the oncoming wave train.
The zero-velocity Dirichlet condition is used at the outlet. A slip wall Neumann-type condition is set for the sides of the domain, whereas the updated hydrostatic pressure is imposed for the bottom and top boundaries. For the hull that runs in following, beam, and quartering seas cases, the overset grid has been used. The ship had to be rotated at the corresponding angle and its mesh be kept aligned with the wave propagation direction. Both upstream boundary conditions are “Wave generator”, which means a sinusoidal wave generator at the incoming frontiers, whereas far-field conditions with zero velocity are used for both downstream frontiers. In these particular cases, ship speed will have two components in and directions, whereas the resulting hydrodynamic resistance will be a composition of the corresponding and forces. A Cardan angle corresponding to the ship’s rotation is used to impose a rotation on the inertia matrix, thus avoiding the need to re-compute it according to the ship’s rotation.
For the particular cases of following, beam, and quartering wave, a so-called internal wave generator is used. The far-field with zero velocity on the boundaries is set at and , Neumann-type symmetry conditions are imposed on the lateral frontiers, whereas the updated hydrostatic pressure is imposed on the top and bottom of the computational domain. On the other hand, the external condition that supposes the communication between the internal domain and the background meshes is imposed. That means the boundary conditions of an overset type, in which the background and overlapping meshes have to be clearly defined such that the communication between the component meshes is performed properly, according to the overall order of accuracy of the numerical scheme. The internal wave generator is placed behind the hull, approximately one and a half wavelengths, which, in this particular case, is equal to from the domain boundary and another from the hull. The background domain contains the internal wave generator, which is fixed to avoid the distortion of the wave signal due to the moving domain.
All the computations were performed either on 120 or on 240 processors. When running the code on parallel machines, the computational domain is split into multiple-connected sub-domains having approximately the same number of unknowns. This is performed by the METIS partitioning algorithm. Communication of face data between sub-domains is performed according to the MPI standard. All the simulations are performed until several encounter waves reach the damping areas. Previous studies on seakeeping numerical simulations have shown that time and space discretizations are highly connected. Since in an unsteady simulation the time step is often determined by the flow properties rather than by the Courant number, to gain a suitable level of accuracy within a reasonable running time, the time step size is chosen well below the level imposed in [23], which is regarded only as a maximal threshold. In our case, the minimum time step is set at , which always leads to a Courant number less than 0.3 everywhere inside the computational domain regardless of the computational scenario. A maximum number of 20 non-linear iterations are imposed for each time step. Four orders were imposed as the convergence criteria. The transpiration method, which changes the boundary conditions for moving bodies, such that instead of deforming the mesh at every non-linear iteration, it uses a transpiration boundary condition, was used. With this approach, the update of mesh boundaries and mesh deformation algorithms is applied only once per time step, decreasing the computational cost.
4. Results and Discussions
The entire attention will be paid in the following to the simulations for reasons strictly related to the existing experimental data needed for the validation of the numerical solutions. That is, for that Froude number of extensive comparisons with the experimental data (EFD hereafter) provided by the Tokyo Workshop in Ship Hydrodynamics 2015, see Case 2.11 in Hino et al. [33], have been performed in an attempt to prove not only the accuracy of the innovative numerical treatments proposed in here but also the overall robustness of the solver. Indeed, the overall reason for the very detailed validations was to make sure that the methodology proposed here could be considered credible, so expected to finally replace the otherwise much more expensive experimental work required in the initial design stage.
4.1. Verification and Validation of the Solution for the Ship Moving in Calm Water
The first set of numerical simulations is devoted to the V&V process in the particular case of the ship moving in calm water at Fr = 0.26, the hull being free to heave and pitch. It is the C0 scenario of Case 2.11 reported in [33]. Four different meshes, denoted by G1…G4 in Table 2, have been generated to host the numerical check, for which the discretization resolutions correspond to a set of a number of cells of G1 = 4.012 × 106; G2 = 8.026 × 106; G3 = 1.608 × 107; G4 = 3.315 × 107, as tabulated in Table 2. The table contains a comparison between the EFD data and the corresponding numerical solutions (CFD) computed on the three considered meshes for the total resistance coefficient, relative sinkage, and trim angle.
Table 2.
Grid sensitivity study for the mean values of the total resistance coefficient, sinkage, and trim computed in calm water.
The absolute departure of the CFD solution from the corresponding EFD data goes from 4.906% for the total resistance coefficient computed on the coarsest grid to 0.593% for the finest one. The largest effective error corresponds to the trim angle, which goes from 5.751% on the coarsest grid to 1.963% on the finest one. Obviously, the errors are monotonically decreasing with the increase in the resolution of the discretization, a fact that may suggest, at a very first glance, the overall accuracy of the ISIS-CFD solver employed here. The statements above are backed up by Figure 3, in which the errors of computed solutions on the four meshes calculated comparatively with the experimental data are highlighted in grey for the resistance coefficient, sinkage, and trim angle, respectively.
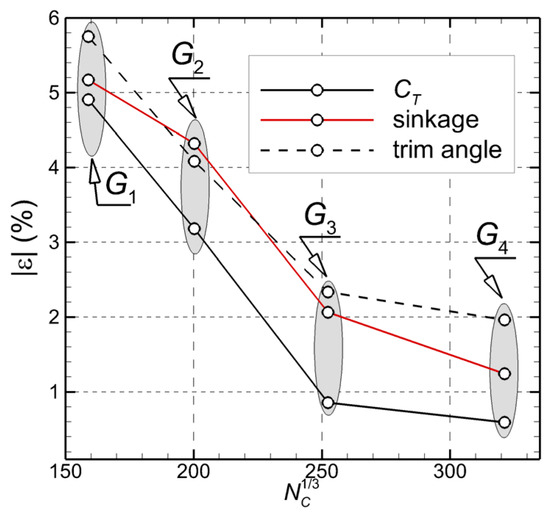
Figure 3.
Grid convergence test.
The grid uncertainty was evaluated by using the methodology described in Eça et al. [44] for monotonic convergence. In the following, a V&V of the computed coefficient of total resistance will be described. The grid ratio the associated relative error between the computed on the finest mesh G4 and the second finest mesh G3, , the ratio between the estimated order of convergence and the theoretical order of convergence , the grid uncertainty , the experimental uncertainty , and the validation uncertainty are tabulated in Table 3.
Table 3.
Verification and validation for the total resistance coefficient.
The in Table 3 is the theoretical order of accuracy, which is given by the order of convection scheme, whereas the validation uncertainty is expressed as . The relative error between the finest mesh and the experimental data for the coefficient of total resistance on the finest grid G4 is smaller than the Richardson-based validation numerical uncertainty, see Table 2 and Table 3, therefore the prediction can be considered as being validated. A similar conclusion can be withdrawn if the sinkage and trim are considered.
The free-surface topology computed on the finest mesh at is depicted in Figure 4, which proves that both fore and aft diverging waves systems are well developed. Although not explicitly emphasized by the figure, the secondary transversal wave system is clearly captured and its wavelength agrees with the theory, which states that . Aside from that, it may be worth mentioning that no wave reflections are seen on the open boundaries, a fact that may suggest the accuracy of the boundary treatment there.
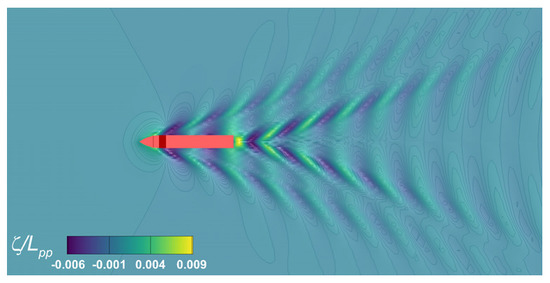
Figure 4.
Free-surface profile computed in calm water at on the finest mesh G3.
4.2. Seakeeping Basics
For a better understanding of the solutions reported in the present paper, an angular conventional relationship between the ship’s heading and the wave encounter angle is proposed in Figure 5, in which the red arrow shows the wave direction. According to the proposed rule, the relative angle will be further identified by the bow wave, the by beam wave, the by quartering wave, and the by the following wave, respectively:
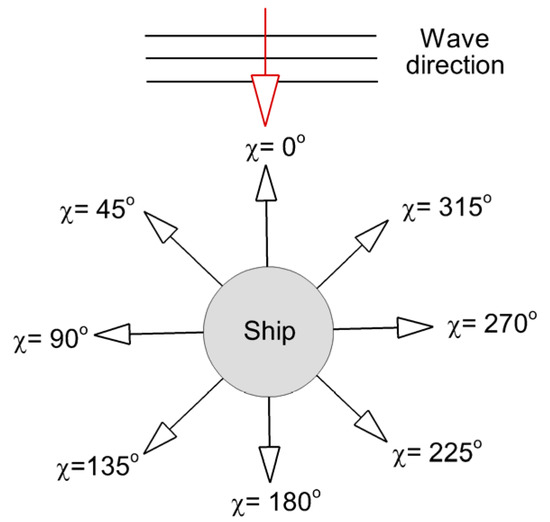
Figure 5.
Relative angle between the ship heading and the wave direction.
The following minimal background is considered necessary for a better understanding of the analyses that will be performed in the following subsections of the paper when a Fourier analysis is performed to find the most relevant harmonics for all the motions the hull performs in all the sea instances considered. According to the theory, the wave amplitude and the wave number are respectively defined as where is the wave height, while is the wavelength. The frequency of the incident wave is, therefore the frequency of the encounter wave is, whereas the wave encounter period is. The heave and pitch motions are defined at the center of gravity, and the wave crest is at the forepeak (FP hereafter) when the instant time of a period is . As a time reference, the incident wave height at the FP of the ship hull is defined as follows:
where is the initial phase and is equal to be zero from the present definition of below. Fourier series for the time history of a given function is given by the following:
is the n-th harmonic amplitude and is the corresponding phase. Here , where:
and
where
Although the numerical simulations reported in the present paper will refer to a series of three Froude numbers, only the case of will be discussed for reasons strictly related to validation purposes of the numerical solutions against the only existing experimental data in the public domain, which has been provided by Hino et al. [33] in Case 2.11.
4.3. Ship Moving in Waves
Five different ship headings will be further analyzed in this subsection of the paper. The waves considered in the present study are of a second-order Stokes type, being generated by a sinusoidal wave generator placed in different positions in the computational domain. The encounter wave, whose wave height is m and with a wavelength equal to the ship length, i.e., m is considered in all the solutions reported. Worth mentioning that a wavelength that equals the ship length is the most difficult case in seakeeping since in most of the cases may be the stage for the resonance occurrence, a navigation situation that should be whenever possible avoided.
The ship model moves at a speed of 1.34 m/s, which corresponds to a Reynolds number of . As mentioned above, different meshes were generated for each heading condition. Refinements were used around the free-surface to better capture the wave profiles. The meshes used in this study are mostly of the overset type except for the head and bow sea cases. As already proven in [16,19,32], overset meshes are especially useful in all cases involving large relative motion between the domain sub-components. Their main advantage consists of allowing an efficient optimization of local cell types and quality, thus reducing the cell count and, therefore, the computation time and eventually reducing the setup effort.
4.3.1. Head Sea Case
This is the C1 scenario of Case 2.11 reported in [33]. The wave patterns around the ship are shown in Figure 6, which is drawn at , and , respectively. Here corresponds to the moment when the uppermost wave crest point of the incident wave touches the bow. The in Figure 6 represents the wave elevation measured from the still water level. The figure shows that the wave system generated by the ship is well developed and its geometry follows the Kelvin profile, in spite of the interaction with the incoming wave train. The Kelvin wave profile is well reproduced numerically in which pairs of diverging and transverse waves can be successfully captured. No wave reflection is detected on the outer boundaries, a fact that proves the efficiency of the absorbers placed there.
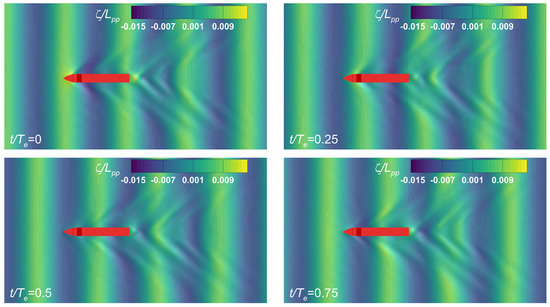
Figure 6.
Free-surface elevations over a period of the head wave encounter.
Previous studies have proven that for short wavelengths, the ship’s motion is in the opposite phase to the wave elevation, which means that the bow moves downward when the encounter crest washes the fore [30]. The phase opposition occurs when the wavelength is close to or equal to the ship length, and it represents a navigation situation that may easily lead to resonance. Aside from that, the risk of green water embarkment, a phenomenon with negative consequences, is very high. Because of the energy accumulated during the relative movement between the fore ship and the water surface, the bow wave becomes very steep and eventually breaks to spend the excess energy, as depicted in Figure 7, which bears out a detailed view of the free-surface of the water around the bow.
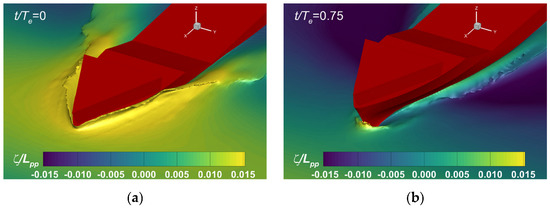
Figure 7.
Bow wave profiles computed in the head sea case at: (a) ; (b) .
The wave breaks in an overturning, plunging manner, which is rather different from the sub-breaking regime reported previously by the author [45] when the piercing body moved in calm water. This behavior is found both at (Figure 7a) and at (Figure 7b), a fact that may demonstrate that when the critical velocity for the breaker occurrence is reached, the breaking phenomenon is triggered and it develops regardless of the other external factors, such as the relative position to the encountered wave. Aside from the breaking phenomenon, a green water embarkment has been revealed at , as shown in Figure 7a.
The green water embarkment has also manifested in experiments, thus explaining somehow the necessity of the bulwark mounted on the forecastle. In the author’s opinion, the good resemblance with the visual observations at experiments emphasized the merit of the DES-SST turbulence model, which succeeded in capturing the free-surface geometry inside a region when the turbulent character of the breaker is prominent. A better mesh resolution around the fore could probably allow a finer capturing of the breaker in spite of the higher CPU costs.
Green water embarkment is a phenomenon that has to be avoided since it may determine an unwanted resistance augmentation with consequences on fuel consumption and ultimately to higher greenhouse gas emissions. More than that, the green water embarkment may lead, in certain circumstances, to a depreciation of the cargo or even worse, to a negative influence on the hull stability. In such cases, the naval architect may recommend to the crew, based on several trial computations, a decrease in the ship’s speed below a certain level that proves to be safe for a given sea state.
Doubtlessly, whenever dealing with a seakeeping problem when the encounter has the same wavelength as the ship length, a turbulent development of the free-surface is expected to be seen behind the aft of the hull. That is shown in Figure 8, which depicts the free-surface profile computed in the wake of the KCS model ship at Figure 8a or at Figure 8b. In spite of not taking advantage of the symmetry of the computational domain, the free-surface profile shows a symmetric topology with respect to the centerline of the ship hull. The wave amplitude on the transom is higher at , which corresponds to the wave crest at the bow as expectable for an encounter whose wavelength is equal to . This fact is confirmed by the physics of the free-surface flow, as it may suggest not only the overall accuracy of the solver but also that the no-slip boundary condition on the solid surface worked properly. Waves produced by the transom seem to be insufficiently mature in terms of their energy, so they eventually trigger the incipient sub-breaking mechanism described in [45]. Since that phenomenon could not be foreseen when the simulation was designed, a necessary additional mesh refinement there was not thought of as being necessary there, with negative consequences on the local flow accuracy.
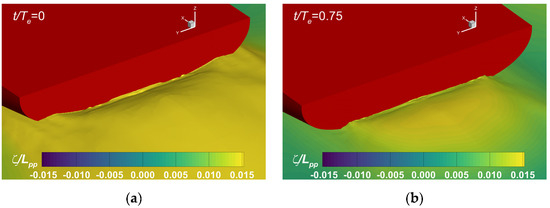
Figure 8.
Stern wave profiles computed in the head sea case at: (a) ; (b) .
The numerical analysis is further performed in terms of the harmonic amplitudes and harmonic phases of the total resistance coefficient , surge , heave motion , and roll and pitch angles , respectively. They are all reconstructed from the Fourier series. Figure 9 bears out the graphic representation of the harmonic amplitudes reconstructed from the Fourier series, whereas Figure 10 shows their corresponding harmonic phases. The amplitudes of surge and heave are nondimensionalized by wave amplitude, whereas those of roll and pitch are by the product of wave amplitude and wave number.
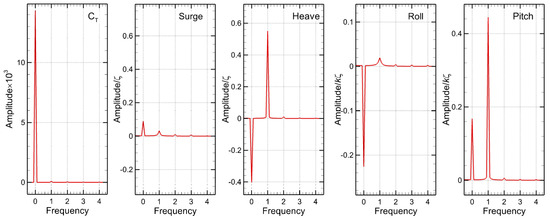
Figure 9.
Harmonic amplitudes of the total resistance coefficient , surge , heave , roll and pitch for the head waves scenario.
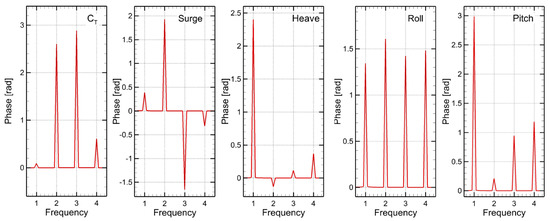
Figure 10.
Harmonic phases of the total resistance coefficient , surge , heave , roll , and pitch for the head waves scenario.
In three of the five analyzed cases, the amplitudes of the first two harmonics are significantly larger than those of the third and fourth. This behavior is obvious for the heave and pitch motions, a fact that may explain the rather higher level of errors computed for the higher harmonics. On the contrary, the phases of reconstructed harmonics seem to have comparable values, as also shown in Table 4, Table 5, Table 6, Table 7 and Table 8, which tabulate the harmonic amplitudes and phases for the above-mentioned parameters.
Table 4.
Harmonic amplitudes and phases of the total resistance coefficient for the head waves scenario.
Table 5.
Harmonic amplitudes and phases of surge for the head waves scenario.
Table 6.
Harmonic amplitudes and phases of heave for the head waves scenario.
Table 7.
Harmonic amplitudes and phases of roll for the head waves scenario.
Table 8.
Harmonic amplitudes and phases of pitch for the head waves scenario.
Numerical solutions denoted by CFD are compared to the corresponding experimental data denoted by EFD in all the tables. All the CFD predicted force coefficients reported here are based on the wetted surface area at rest . Force coefficients are defined as , where is the total resistance. On the other hand, the amplitude and phase are analyzed for each motion based on the time-history data of the wave height and the ship motions measured in the tests. The obtained motion amplitudes of the surge and heave were nondimensionalized using the incident wave amplitude expressed as . In addition, the motion amplitudes of the roll and pitch were nondimensionalized using the wave inclination , where is the wave number of the incident waves. All the EFD data were provided in [33] and they are in the public domain.
Comparisons performed in terms of amplitudes and phases reveal a level of errors ranging from 2.17% to 8.84% for amplitudes and from 2.37% to 8.12% for phases, as tabulated in Table 4, Table 5, Table 6, Table 7 and Table 8. Considering that the most relevant harmonic of the amplitudes and phases is the fundamental one, one may consider that the absolute errors are acceptable for any practical study, which is performed in the basic design stage of a new ship when the seakeeping performances are investigated for a given hull form moving in waves. Indeed, they really are since all of them are beyond the threshold of the so-called “sea margin”, which is still in wide use by naval architects when the general hydrodynamic performance of a ship is estimated.
With the present results at hand, one may raise a legitimate question of whether such a common design principle is still valid under the provisions imposed by the EEDI restrictions, or whether they simply fall into the obsolete area of use. The smallest absolute error corresponds to the amplitude of the resistance coefficient , whereas the largest one corresponds to the fourth harmonic of the roll motion amplitude. It is worth noticing that the computed errors reported here are significantly smaller than those reported in [33] on the solutions submitted to the Tokyo Workshop in the similar case denoted by Case 2.11. The reporters concluded that the absolute average error for the 0th harmonic of the pitch amplitude varied from 9.96% for to 16.41%, for the case, whereas for the first harmonic it varied from 38.68% for to 6.02% for the case. In terms of phase, the reported absolute error for the first harmonic varied from 4.31% for to 4.68% for the computational case.
Next, an analysis of the variation of the reconstructed parameters that describe the ship’s motions in waves over a period of 20 encounters is proposed in Figure 11. Without any exception, all the graphs reveal not only the stability of the mean numerical solutions but also their periodicity. It is worth mentioning that no noisy variation of the considered physical parameters can be observed over the considered period. This may confirm that the numerical model was appropriately chosen and that the numerical solver worked properly regardless of the physical parameters, displacements, or angles, that describe the considered degrees of freedom.
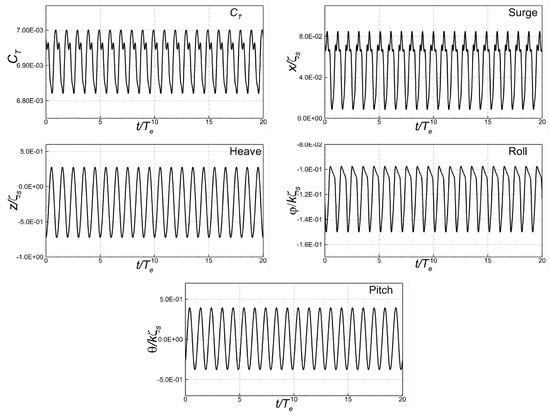
Figure 11.
Time histories of the Fourier reconstructed resistance coefficient , surge , heave , roll and pitch for the head waves scenario.
The resemblance with the experimental data is emphasized in Figure 12, which bears out multiple comparisons of the time histories of the reconstructed resistance coefficient surge , heave , roll , and pitch between the measured (EFD) and computed (CFD) over a single period of the encountered wave in the head waves scenario. The computed solution is drawn with solid lines, whereas the experimental data are depicted with symbols. For the sake of clarity in the representation, only the second available experimental point was drawn.
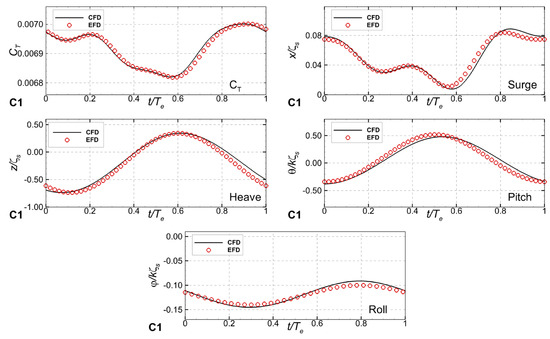
Figure 12.
Comparisons between the time histories of the reconstructed resistance coefficient surge , heave , roll , and pitch measured (EFD) [33] and computed (CFD) over a period of the encounter wave in the head waves scenario.
All the comparisons depicted in Figure 12 reveal a satisfactory overall resemblance of the amplitudes of the numerical and experimental data, except for the surge, heave, and pitch motions, where an overestimation of the numerical solutions is detectable. The author considers that this may be attributable to the performance of the hybrid DES-SST turbulence model employed. This is due to the lack of experimental data based on which its effectiveness in the free-surface vicinity could be validated. Since in that very restricted area, the flow complexity due to the interaction between the ship’s motion and the incoming wave requires more careful experimental studies, a concluding statement is still difficult to advance. Obviously, from this point of view, many more experimental studies are further required to argue for a clear solution to the problem.
On the other hand, the numerical solutions have shown a better agreement with experiments than the raw signals, as obtained by the time-dependent results. Noticeably, that is caused by the fact that, on the raw signals, a low mean frequency was seen when the reconstruction from the Fourier series was performed. This may be presumably determined by the waves which were generated without a sufficiently smooth ramp on the amplitude, thus leading to a bump at the beginning of the computation and therefore to some undesirable numerical instabilities. Since this is only a supposition of the author, as mentioned above, more systematic numerical studies are still needed to clarify completely the reason for the observed instabilities.
4.3.2. Bow Sea Case
The next computation treats the bow wave case in the C2 scenario of Case 2.11 of Hino et al. [33] when the relative angle between the centerline of the ship and the wave propagation direction is . For the sake of similarity, the same steps taken above when the head wave case was analyzed will be pursued here. Figure 13 shows the free-surface topology computed at the four instant positions of the ship with respect to the crest of the encounter. Owing to the interaction between the encountered wave and the hull, the symmetry of the wave system generated by the ship hull is altered, as the figure bears out.
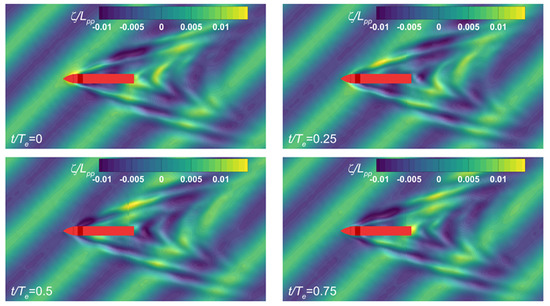
Figure 13.
Free-surface elevations over a period of the bow wave encounter.
Somehow, surprisingly, in the bow wave case, the breaking does not occur. This fact may be attributable to a more consistent dissipation of the turbulent energy inside the bow region because of the encounter’s relative position. The TKE probing not reported here showed neither large values nor strong gradients inside the fore region of the hull. The shape of the simulated wave on the two boards at depicted in Figure 14 sustains the above statement. No discontinuities in the wave patterns were seen, a fact that indicates the breaking absence. Obviously, the difference between the wave profiles on the two boards induces a change in the wetted surface and the pressure distribution on the hull, with consequences not only on the hydrodynamic resistance but also on the ship’s motions. The same differences were found when the beam and quartering wave cases were simulated, as will be discussed in the following. SB and PS in Figure 14 stand for starboard and portside, respectively.
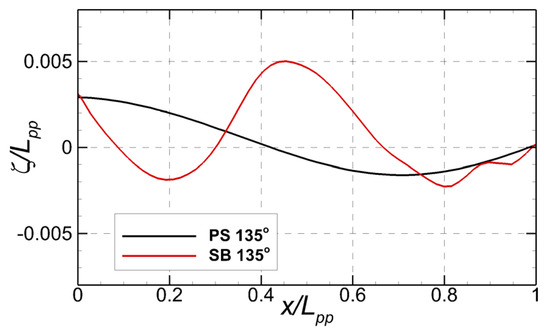
Figure 14.
Wave profiles on the hull.
Another effect determined by the bow wave train is the way the interaction between the encounter and the Kelvin wave system is produced by the hull. That is, because of the different directions of propagation and of the differences between the wavelengths, the bow wave induces a significant decrease in the amplitudes of the waves created by the hull. Obviously, this reduction is due to the interaction with the higher energy of the encounter, which eventually leads to a damping of the proper wave system. Besides, the 40° Kelvin angle decreases asymmetrically downstream of the hull, a fact that may have a significant effect on the nominal wake at which the propeller is usually designed. From this point of view, the lack of symmetry is expected to eventually lead to unbalanced overloads not only on the propeller blades but also on the bearings of the shaft line.
Similar to the head wave case, the harmonic amplitudes and harmonic phases of the total resistance coefficient , surge , heave motion , and roll and pitch angles , will be further analyzed. They are all reconstructed from the Fourier series. Figure 15 depicts the graphic representation of the harmonic amplitudes reconstructed from the Fourier series, whereas Figure 16 shows their corresponding harmonic phases. In three of the cases, i.e., the total resistance coefficient, heave, and pitch, the amplitudes of the first two harmonics are significantly larger than those of the third and fourth, as depicted in Figure 15. Things are modified when the harmonic phases are considered. That is, the absolute values of the reconstructed phases have comparable values regardless of the frequencies. Obviously, this change is due to the non-zero incidence angle of the encounter reported to the ship’s centerline, which induces an augmentation for all the harmonics for the ship’s motions with respect to the wavy water surface. A similar situation has been found in the quartering wave scenario, as it will be shown later.
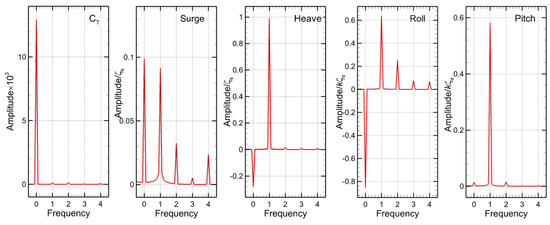
Figure 15.
Harmonic amplitudes of the total resistance coefficient , surge , heave , roll , and pitch for the bow waves scenario.
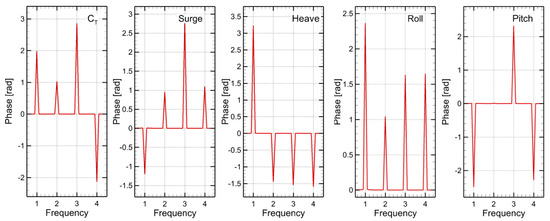
Figure 16.
Harmonic phases of the total resistance coefficient , surge , heave , roll , and pitch for the bow waves scenario.
In the following, another comprehensive set of comparisons between the CFD solutions and the corresponding experimental data existing in the public domain, [33], is presented in Table 9, Table 10, Table 11, Table 12 and Table 13 for harmonic amplitudes and phases of the same physical parameters as in the head sea navigation case discussed previously. Again, the absolute errors are smaller for amplitudes than for the phases for all the motions for the same reasons as found in the head of wave computation. Obviously, the larger the value of the computed value is, the smaller the absolute error is, in spite of the fact that all the computations reported herein have been performed in double precision.
Table 9.
Harmonic amplitudes and phases of the total resistance coefficient for the bow waves scenario.
Table 10.
Harmonic amplitudes and phases of surge for the bow waves scenario.
Table 11.
Harmonic amplitudes and phases of heave for the bow waves scenario.
Table 12.
Harmonic amplitudes and phases of roll for the bow waves scenario.
Table 13.
Harmonic amplitudes and phases of pitch for the bow waves scenario.
On the other hand, it has been observed that the associated errors of the total resistance coefficient and of the axial motions surge and heave tabulated in Table 9, Table 10 and Table 11 are again smaller than those corresponding to the angular motions, i.e., roll (Table 12) and pitch (Table 13). In spite of the fact that all the motions are solved as a package, one may raise the doubt that the solver may need some more attention for the procedures that compute the angular motions.
Despite all those mentioned above, it is worth mentioning that in all the reported cases, the absolute values of the computational errors for the first harmonic, which is the one that is the most relevant from a practical engineering point of view, are less than 3.24%, well below the so-called sea-margin that is nowadays still commonly used in the initial design stage. This level of error is completely acceptable for any common practical application in the basic design stage of a new ship, whose forms are still susceptible to further improvements based on trial pilot computation meant to substitute the huge time and financial resources consumptions supposed by traditional experimental seakeeping experimental work.
Next, an analysis of the computed time histories based on the reconstructed resistance coefficient and surge, heave, roll, and pitch motions is proposed in Figure 17, which bears out a sampling of twenty non-dimensional encounters. Both the periodicity of the numerical solutions and their constancy in time are noticeable, as they were also found in the head wave numerical simulation. Departures from the classic sine or cosine shapes are observed for the , surge and roll motions, as expected. A possible reason for that could be the manner in which the interference between the two wave trains takes place. That is, the incoming bow wave system of higher energy and the weaker own wave system produced by the ship hull intersects under an angle of 45°, a fact that eventually determines a significant change of the free-surface topology with direct consequences on the ship resistance and motions. Following the same sequence of steps taken when the head and bow sea cases have been analyzed, in the following, a validation of the numerical solution is proposed in Figure 18, which shows multiple comparisons of the CFD results with the experimental data [33].
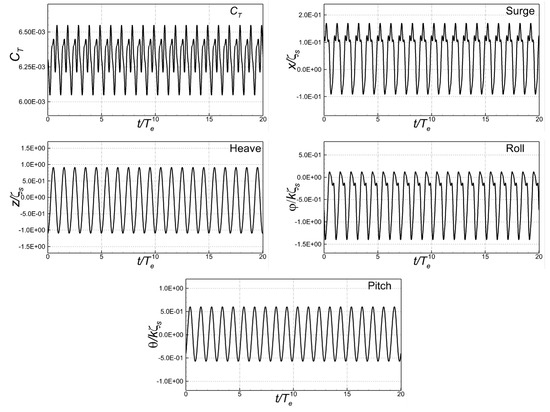
Figure 17.
Time histories of the Fourier reconstructed resistance coefficient , surge , heave , roll and pitch for the bow waves scenario.
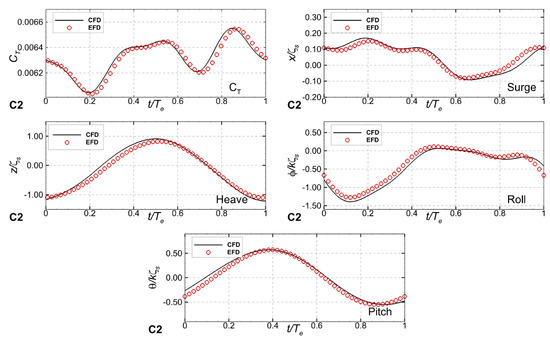
Figure 18.
Comparisons between the time histories of the reconstructed resistance coefficient surge , heave , roll , and pitch measured (EFD) [33] and computed (CFD) over a period of the encounter wave in the bow waves scenario.
The differences between the two are again within acceptable limits, except for the pitch motion, where a slightly high departure was found at smaller values of . Comparisons do not reveal significant phase shifts except for the non-dimensional resistance coefficient and the surge motion, where maximum shifts of 4.7% and 5.8% were found. In the opinion of the author, this may be due to the time step size, which was not sufficiently small to lead to a more accurate determination of the relative period of the encounter. However, in spite of this punctual discrepancy, one may conclude that the simulation of the bow sea case could reproduce the experimental data properly, within more than reasonable levels of errors.
4.3.3. Beam Sea Case
The next investigation is treating the beam wave case, the C3 scenario of Case 2.11 of Hino et al. [33]. This is probably the most difficult to simulate numerically because of the sway and roll motions of the hull, which become more significant. In this particular case, several special measures, such as the time step size, the extension of the wave damper, etc., need to be taken when the numerical parameters of the simulation are set up to avoid unwanted numerical instabilities. Aside from that, a dynamic mesh adaptation has been employed to describe more accurately the free-surface geometry. Additionally, a sub-cycling method on the volume fraction equation has been used to reduce the computation time increased by additional computations required by the mesh adaption. The free-surface geometry shown in Figure 19 reveals the expected lack of symmetry of the own wave system because of the interference with the oncoming wave system. No numerical wave reflections have been found, a fact that may suggest the efficiency of the extended lateral wave dampers that could efficiently absorb the oncoming waves. It is important to notice that in this navigation scenario, the wave-breaking phenomenon has been detected.
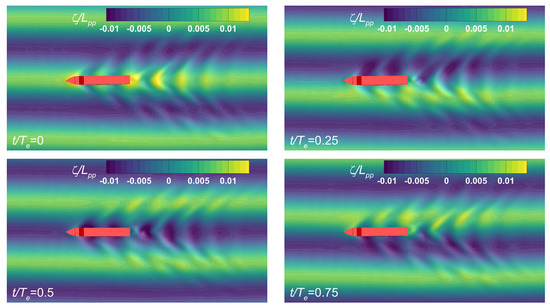
Figure 19.
Free-surface elevations over a period of the beam wave encounter.
The harmonic amplitudes and phases reconstructed from the Fourier series of the solution computed in the beam sea case are depicted in Figure 20 and Figure 21, respectively. As in the previous navigation scenarios, the first harmonic of the amplitudes and sometimes the seconds and thirds are usually higher than the fourth ones. As expected, the amplitude of the non-dimensional total resistance coefficient keeps on being the largest among the others. Once again, things are rather different when the phases are considered. That is when the harmonic phases are somehow comparable. Since this behavior has been revealed by the computations performed for the quartering and following sea cases, the discussions on the reconstructed amplitudes and harmonics will be simply skipped in the two navigation cases, which will be analyzed in the following sub-sections of the present paper.
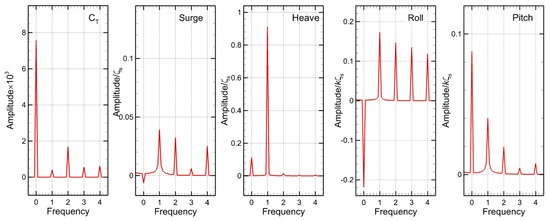
Figure 20.
Harmonic amplitudes of the total resistance coefficient , surge , heave , roll , and pitch for the beam waves scenario.
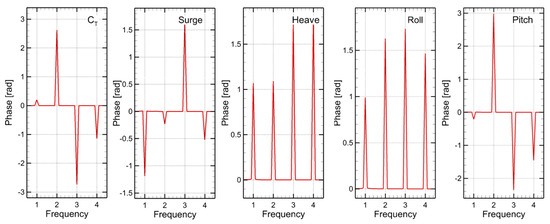
Figure 21.
Harmonic phases of the total resistance coefficient , surge , heave , roll , and pitch for the beam waves scenario.
Next, comparisons between the CFD solutions and the corresponding experimental data provided by Hino et al. [33] are tabulated in Table 14, Table 15, Table 16, Table 17 and Table 18 for harmonic amplitudes and phases of the same physical parameters as in the head and bow sea navigation cases discussed above. The comparisons reveal once again that the absolute errors are within acceptable limits, varying from 2.12% to 3.01% for the fundamental harmonics of the amplitude and from 2.62% to 3.44% for phases. Obviously, these values are sufficiently small to be considered not only acceptable for common engineering applications but also trustworthy for validating the novel numerical approaches proposed here.
Table 14.
Harmonic amplitudes and phases of the total resistance coefficient for the beam waves scenario.
Table 15.
Harmonic amplitudes and phases of surge for the beam waves scenario.
Table 16.
Harmonic amplitudes and phases of heave for the beam waves scenario.
Table 17.
Harmonic amplitudes and phases of roll for the beam waves scenario.
Table 18.
Harmonic amplitudes and phases of pitch for the beam waves scenario.
As stated above, the Courant number chosen in the present study was slightly less than 0.3, regardless of the wave direction. The author supposes that it may probably be less than 0.2. Since this is only a supposition, some additional trial computations are necessary to quantify the influence of the spatial and temporal discretization resolutions on the numerical solution accuracy.
Figure 22 depicts comparisons between the time histories of the reconstructed numerical solutions for , surge, heave, roll, and pitch and their corresponding measured values. Although the differences between the two may be considered satisfactory, slight phase shifts were noticed for the surge and roll motions, where the numerical solutions show larger periods. This fact may be attributable to a sort of viscous dissipation, whose origin may reside either in the mesh coarseness in the immediate vicinity of the ship hull or in the too large time step chosen for this computational case.
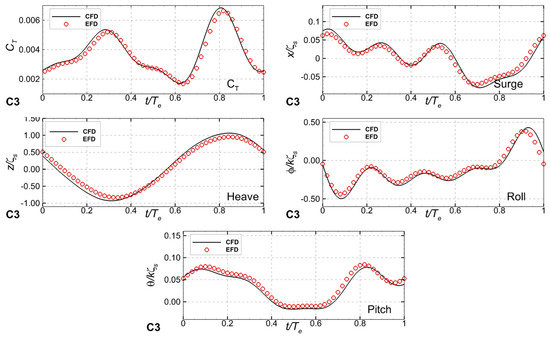
Figure 22.
Comparisons between the time histories of the reconstructed resistance coefficient , surge , heave , roll , and pitch measured (EFD) [33], and computed (CFD) over a period of the encounter in the beam waves scenario.
4.3.4. Quartering Sea Case
The next numerical investigation is approaching the quartering wave case, the C4 scenario of Case 2.11 in [33]. The interference between the external wave train and the wave system produced by the moving hull is depicted in Figure 23 for the four relative positions between the ship and the wave crest of the encounter considered in the above-studied cases. For convenience, let us consider the quartering wave system as the main one and the own wave system of the hull as the secondary. The periodicity of the main wave train shown in Figure 23 proves that the internal wave generator worked well. Although asymmetrical, the secondary wave system looks well captured in all the considered instances. In spite of the appearances, a closer check of the free-surface topology reveals a slight increase in the wavelength for the main wave train, as happened in the bow wave case. Obviously, this is caused by the interference with the secondary one, which induces energy dissipation through the interaction with the main wave train. Similar to the bow wave case, the breaking phenomenon did not have to be observed.
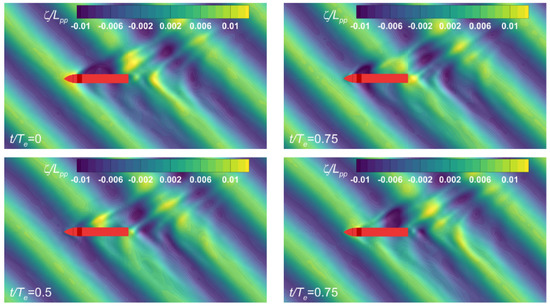
Figure 23.
Free-surface elevations over a period of the quartering wave encounter.
As a result of the interference, the resulting wave profiles on the ship hull lose their symmetry, as shown in Figure 24, which bears out the solution drawn at . Definitely, this change leads to non-symmetric pressure distribution on the hull and to its effective wetted area, with consequences on the ship’s resistance and motions, as it will be shown in the following, when the added resistance in waves will be discussed. The wave profiles do not show any discontinuity, so no breaking is detected. The in Figure 24 corresponds to the aft perpendicular, whereas corresponds to the fore perpendicular. It is worth mentioning that the wave cuts have the same elevation at the bow while notable differences are seen along the hull because of the relative angle between the centerline of the moving hull and the direction of propagation of the main wave system. For reasons related to the space constrictions, only the comparisons between the harmonic amplitudes and phases computed here and the experimental data provided by Hino et al. [33] will be further discussed based on the figures which are tabulated in Table 19, Table 20, Table 21, Table 22 and Table 23.
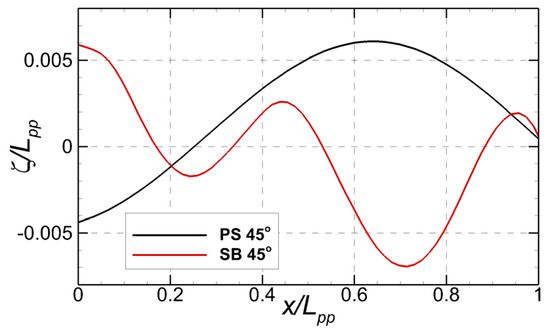
Figure 24.
Wave profiles on the hull.
Table 19.
Harmonic amplitudes and phases of the total resistance coefficient for the quartering waves scenario.
Table 20.
Harmonic amplitudes and phases of surge for the quartering waves scenario.
Table 21.
Harmonic amplitudes and phases of heave for the quartering waves scenario.
Table 22.
Harmonic amplitudes and phases of roll for the quartering waves scenario.
Table 23.
Harmonic amplitudes and phases of pitch for the quartering waves scenario.
Following the same procedure as above, the analysis will be performed separately for the total resistance coefficient and for the main motions, i.e., surge, heave, roll, and pitch. As in the previous navigation scenarios, the smallest absolute error of 2.72% corresponds to the fundamental harmonic of the total resistance coefficient. On the other hand, the largest absolute error of 9.21% corresponds to the fourth harmonic of the surge. In terms of phases, the smallest error of 3.03% corresponds to the first harmonic of the heave, whereas the largest one of 8.18% corresponds to the fourth harmonic of the pitch motion. Behind all these figures, the main conclusion withdrawn in the other navigation scenarios remains valid here as well. That is, the numerical simulation may provide solutions whose accuracy is sufficiently good for the first harmonics of the amplitudes and phases. Things get worse with the third and fourth harmonics, regardless of the hydrodynamic parameter they refer to. Taking the experimental data as accurate, it remains that the Fourier analysis is probably susceptible to further improvements that may help in reducing the level of errors.
In spite of the relatively high level of errors found for the higher harmonics, one may notice that the overall level of accuracy obtained in the research reported here is well above that reported in Hino et al. [33], thus confirming the appropriateness of the methodology employed as well as the quality of the capabilities offered by the ISIS-CFD solver.
Following the same order of presentation as in the other navigation scenarios, the same set of comparisons between the time histories of the reconstructed total resistance coefficient and main motions computed (CFD) and measured (EFD) is further proposed in Figure 25. The good resemblance between the two sets of data mentioned when Table 19, Table 20, Table 21, Table 22 and Table 23 were analyzed is confirmed in the figure. In spite of a slightly larger level of errors in amplitudes than in the previous navigation scenarios, this time no significant phase shifts are found. Wrapping up, based on the provided evidences, the reader may observe that the accuracy shown in the numerical simulation of the quartering sea scenario against the available experimental data can be again considered more than satisfactory for any routine practical application.
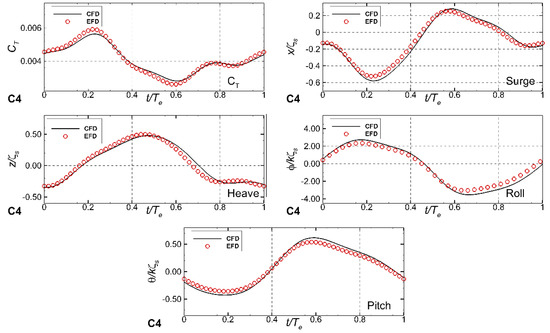
Figure 25.
Comparisons between the time histories of the reconstructed resistance coefficient , surge , heave , roll , and pitch measured (EFD) [33], and computed (CFD) over a period of the encounter in the quartering waves scenario.
4.3.5. Following Sea Case
The next numerical investigation is devoted to the following wave case, which is the C5 scenario of Case 2.11 in [33]. All the novel approaches employed so far in the present simulation, i.e., the inner wave generator, the overset mesh technique, the hybrid DES-SST turbulence model, and last but not least, the dynamic adaptive mesh refinement, are again used. The time step and minimum mesh size in the proximity of the hull and free-surface of the water were chosen such that the Courant number remains around the 0.3 value. For the sake of checking the appropriateness of the boundary conditions formulation, the computations did not take advantage of the symmetry of the flow problem in spite of the higher CPU costs.
Figure 26, which depicts the free-surface in the same four relative positions as the hull and the encounter, clearly shows that the main wave train periodicity is preserved. Aside from that, it is worth emphasizing that the symmetry of the secondary wave system is well captured, regardless of the relative position of the hull with respect to the encounter evolution. In total, 50 different probing data of the numerical solution distributed on the free-surface but not reported here have shown that the departure from the symmetry was always below 0.05% regardless of their spatial positions with respect to the centerline of the ship hull or to its fore and aft perpendiculars.
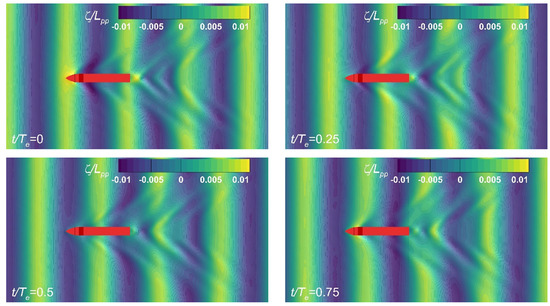
Figure 26.
Free-surface elevations over a period of the following wave encounter.
The wave-breaking phenomenon found when the head sea was analyzed can be reported here as well. Figure 27a clearly shows that at the overturning breaker occurs around the bow of the hull and develops toward downstream. This time, no green water embarkment on the deck was observed as in the head sea scenario, which proved to be the most favorable for the occurrence of such an unwanted phenomenon. The wave-breaking phenomenon found when the head sea was analyzed can be reported here as well. Figure 27a clearly shows that at the plunging breaker, it occurs around the bow of the hull and develops towards downstream. This time, no green water embarkment on the deck was observed as in the head sea scenario, which proved to be the most favorable for the occurrence of such an unwanted phenomenon.
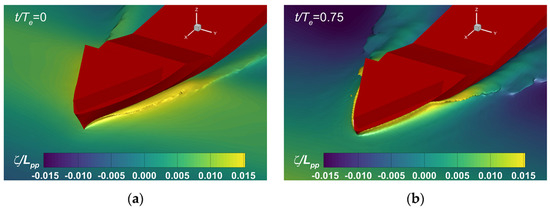
Figure 27.
Bow wave profiles computed in the head sea case at: (a) ; (b) .
Systematic computations proved that the critical conditions presented in that work were completely fulfilled, so it is presumable that this intermediate breaking phenomenon takes place around the steeper wave crest, which breaks in a plunging manner as shown in Figure 27b. Pilot computations not reported here have shown that the breaking wave may determine an augmentation of about 6.81% of the hull resistance, whereas the sub-breaking may lead to a 2.92% increase in it. Based on these data, it may be concluded that these phenomena need to be considered since they ultimately require a higher needed power on board and subsequently to higher fuel consumption with direct consequences on the greenhouse gas emission in the atmosphere.
Additional trial computations not reported here showed that for a slower steaming of about 6.2%, in speed the breaking could be avoided. In this particular case, the overall gain in the total resistance of about 9.89% for the head scenario and 6.01% for the following sea one could be attained. Since this is significant for the total budget of the ship’s efficiency.
The harmonic amplitudes and phases computed numerically are compared to the experimental ones for the total resistance coefficient, surge, heave, roll, and pitch in Table 24, Table 25, Table 26, Table 27 and Table 28. All the remarks made when the other navigation scenarios were analyzed remain valid here as well. Even though the computed and measured values are different, their trend is similar to that shown before. Again, the errors have the smallest values for the fundamental harmonics and the largest for the third and fourth ones. Surprisingly, the levels of the absolute errors calculated for phases are this time smaller than those calculated for the amplitudes, as happened in the previous navigation scenarios which were discussed above.
Table 24.
Harmonic amplitudes and phases of the total resistance coefficient for the following waves scenario.
Table 25.
Harmonic amplitudes and phases of surge for the following waves scenario.
Table 26.
Harmonic amplitudes and phases of heave for the following waves scenario.
Table 27.
Harmonic amplitudes and phases of roll for the following waves scenario.
Table 28.
Harmonic amplitudes and phases of pitch for the following waves scenario.
The good agreement of the theoretical solutions with the experimental data is also revealed in Figure 28, which bears out a multiple comparison between the time histories of the reconstructed resistance coefficient surge , heave , roll , and pitch measured (EFD) and computed (CFD) over the period of the encounter wave in the following wave scenario. The computed solution is drawn with solid lines, whereas the experimental data are depicted with symbols. Even though not significant, there are a few differences between the non-dimensional amplitudes of the total resistance coefficient and the surge and roll motions. Those differences are attributable to the different conditions for the numerical simulation. Seemingly, the computational mesh needs some adjustments in this particular case. Aside from that, several additional pilot computations are probably required to find the optimal settings of the solver parameters in the following sea navigation conditions
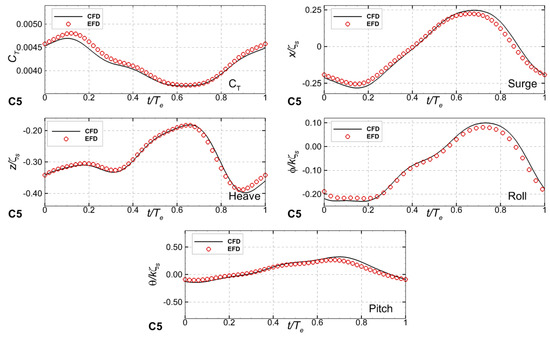
Figure 28.
Comparisons between the time histories of the reconstructed resistance coefficient , surge , heave , roll , and pitch measured (EFD) [33], and computed (CFD) over a period of the encounter in the following waves scenario.
4.4. Wave Added Resistance
Needless to say, the main scope of any seakeeping investigation should be the accurate estimation of the added wave resistance under various navigation conditions. All the total resistance coefficients tabulated in Table 29 are computed based on the effective wetted surface areas of the hull computed for each particular case. Analyzing the figures, one may find that the highest added resistance in waves corresponds to the head wave scenario when for the wavelength that equals the , the added resistance coefficient is more than twice the coefficient computed for the navigation in calm water. Obviously, things get better in all the other navigation scenarios.
Table 29.
Added resistance in waves computed for and .
5. Concluding Remarks
The paper described a systematic numerical investigation of the seakeeping performance of the KCS containership moving in calm water and five heading conditions. The numerical approach based on a finite volume solver with a volume of fluid technique tailored for capturing the free-surface was employed to solve the problem. The main objective of the study was to design a robust but practical methodology usable in the design process of a new ship. Summarizing all those described in the previous sections, one may conclude that the methodology comprises the following steps:
- −
- A careful flow conditions analysis, which is needed for suiting a proper computational domain size, the dimensions of the wave absorbers and their position inside the domain, and an optimal resolution of the mesh;
- −
- The establishment of the proper computational strategy in terms of the mathematical model, the turbulence treatment, initial and boundary conditions formulation, adaptive mesh refinement, time step sizing, flow acceleration low, etc.;
- −
- V&V computations for three or preferably four different grids to make sure that the solution will converge;
- −
- Numerical integration of the flow equations on the chosen computational mesh;
- −
- Performing all the computations needed to validate both the accuracy of the chosen method as well as the robustness of the solver. Comparisons with the existing experimental data are recommended whenever possible;
- −
- Flow analysis and conclusions related to the seakeeping performances of the chosen hull.
Several innovative treatments, such as the overset meshes technique, adaptive mesh refinement at the free-surface, hybrid DES-SST turbulence modeling, and so on, were proposed aimed at obtaining accurate and trustful solutions. A complete set of comparisons with the experimental data provided at the Tokyo 2015–A Workshop on CFD in Ship Hydrodynamics [33,36] has been performed for validating the methodology proposed here. The grid uncertainty was assessed. As the minimum grid size decreased, the wave amplitude, total resistance, and motion responses showed a monotonic convergence. With this bird’s-eye view at hand, the following conclusions may be put forward:
- −
- Through the Fourier series analysis, it was found that the computed total resistance and motion responses were similar to the available experimental data. Insignificant errors, i.e., below 3%, were noticed for the first harmonics of the amplitudes and phases, regardless of the navigation scenario;
- −
- On the opposite, the errors were larger for the third and fourth harmonics of both amplitudes and phases. On one hand, this may be attributable to the difficulties in working precisely with small numbers. On the other hand, another reason should be that in all the cases, the wavelength was equal to the ship length and the risk of resonance, with all its negative consequences, was rather high;
- −
- In the head wave case, both a green water embarkment on the forecastle deck and breaking phenomenon have been detected. Large areas of high turbulence kinetic energy seem to be responsible for the overturning breaking wave occurrence around the bow. On the other hand, a sub-breaking wave was detected at the stern region;
- −
- Breaking waves of a plunging type were also observed in the following sea case, but only at the fore part of the hull;
- −
- For the head wave, the added resistance was 206% larger compared to the one computed in calm water;
- −
- Significant added resistance was also computed in the bow, beam, and quartering sea scenarios, when the increases of the total resistance coefficients were the following: 180%, 64.2%, and 44.82%, respectively. The only favorable situation for a lower carbon stamp has been found in the following sea case when the added resistance resulted slightly negative.
Funding
This research did not receive any external funding.
Acknowledgments
The author wishes to express his gratitude to the HPC manager at that time, Adrian Istrate, without whose continuous assistance and technical support in finding ingenious solutions for benefiting at a maximal level of the computational resources, this research could not be possible.
Conflicts of Interest
The author declares no conflict of interest.
References
- IMO. Guidelines on the Method of Calculation of the Attained Energy Efficiency Design Index (EEDI) for New Ships; MEPC 254; International Maritime Organization: London, UK, 2014; Available online: https://imorules.com/MEPCRES_254.67_ANN.html (accessed on 5 July 2022).
- IMO. Amendments to the 2014 Guidelines on Survey and Certification of the Energy Efficiency Design Index (EEDI); MEPC 261; International Maritime Organization: London, UK, 2015; Available online: https://imorules.com/GUID-73A87470-AA72-4EBF-BC8A-113802346E59.html (accessed on 5 July 2022).
- Jiao, J.; Chen, C.; Ren, H. A comprehensive study on ship motion and load responses in short-crested irregular waves. Int. J. Naval Arch. Ocean Eng. 2019, 11, 364–379. [Google Scholar] [CrossRef]
- Ravinthrakumar, S.; Kristiansen, T.; Molin, B.; Ommani, B. Coupled vessel and moonpool responses in regular and irregular waves. Appl. Ocean Res. 2020, 96, 102010. [Google Scholar] [CrossRef]
- Sadat-Hosseini, H.; Kim, D.; Toxopeus, S.; Diez, M. CFD and potential flow simulations of fully appended free running 5415 m in irregular waves. In Proceedings of the 5th World Maritime Technology Conference (WMTC15), Providence, RI, USA, 3–7 November 2015. [Google Scholar]
- Weems, K.M.; Belenky, V.; Spyrou, K.J. Numerical simulations for validating models of extreme ship motions in irregular waves. In Proceedings of the 32nd Symposium on Naval Hydrodynamics, Hamburg, Germany, 5–10 August 2018. [Google Scholar]
- Serani, A.; Diez, M.; van Walree, F.; Stern, F. URANS analysis of a free-running destroyer sailing in irregular stern-quartering waves at sea state 7. Ocean Eng. 2021, 237, 109600. [Google Scholar] [CrossRef]
- Zhou, W.; Zhu, R.; Chen, X.; Hong, L. Vertical integral method incorporated with multi-domain HOBEM for time domain calculation of hydrodynamics of forward speed ship. Appl. Ocean Res. 2020, 94, 101997. [Google Scholar] [CrossRef]
- Zha, L.; Zhu, R.; Hong, L.; Huang, S. Hull form optimization for reduced calm-water resistance and improved vertical motion performance in irregular head waves. Ocean Eng. 2021, 233, 109208. [Google Scholar] [CrossRef]
- Tang, Y.; Sun, S.; Ren, H. Numerical investigation on a container ship navigating in irregular waves by a fully nonlinear time domain method. Ocean Eng. 2021, 223, 108705. [Google Scholar] [CrossRef]
- Lungu, A. Numerical simulation of the free-surface turbulent flow around a VLCC ship hull. Numer. Anal. Appl. Math. 2007, 936, 647–650. [Google Scholar] [CrossRef]
- Hashimoto, H.; Yoneda, S.; Omura, T.; Umeda, N.; Matsuda, A.; Stern, F.; Tahara, Y. CFD prediction of wave-induced forces on ships running in irregular stern quartering seas. Ocean Eng. 2019, 188, 106277. [Google Scholar] [CrossRef]
- Lungu, A.; Pacuraru, F. Numerical study of the hull-propeller-rudder interaction. Numer. Anal. Appl. Math. 2009, 1168, 693–696. [Google Scholar] [CrossRef]
- Pacuraru, F.; Lungu, A.; Marcu, O. Self-propulsion simulation of a tanker hull. Numer. Anal. Appl. Math. 2011, 1389, 191–194. [Google Scholar] [CrossRef]
- Lungu, A. Numerical simulation of the resistance and self-propulsion model tests. J. Offshore Mech. Arct. Eng. 2020, 142, 021905. [Google Scholar] [CrossRef]
- Carrica, P.M.; Wilson, R.V.; Noack, R.W.; Stern, F. Ship motions using single-phase level set with dynamic overset grids. Comp. Fluids 2007, 36, 1415–1433. [Google Scholar] [CrossRef]
- Carrica, P.M.; Paik, K.; Hosseini, H.S.; Stern, F. URANS analysis of a broaching event in irregular quartering seas. J. Mar. Sci. Technol. 2008, 13, 395–407. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Carrica, P.M.; Huang, J.J.; Noack, R.; Kaushik, D.; Smith, B.; Stern, F. Large-scale DES computations of the forward speed diffraction and pitch and heave problems for a surface combatant. Comput. Fluids 2010, 39, 1095–1111. [Google Scholar] [CrossRef]
- Martin, J.E.; Kim, Y.; Kim, D.; Li, J.; Wilson, R.V.; Carrica, P.M. Boundary Layer Transition Models for Naval Applications: Capabilities and Limitations. In Proceedings of the 32nd Symposium on Naval Hydrodynamics, Hamburg, Germany, 5–10 August 2018. [Google Scholar]
- Lungu, A. A DES-SST based assessment of hydrodynamic performances of the wetted and cavitating PPTC propeller. J. Mar. Sci. Eng. 2020, 8, 297. [Google Scholar] [CrossRef]
- Xing, T.; Carrica, P.M.; Stern, F. Large-Scale RANS and DDES Computations of KVLCC2 at Drift Angle 0 Degree. Gothenburg 2010: A Workshop on CFD in Ship Hydrodynamics, Gothenburg, Sweden. Available online: https://www.taoxing.net/wp-content/uploads/2021/04/g2010_paper_xing_etal-final.pdf (accessed on 12 August 2022).
- ITTC 7.5-02-07-01.2. Laboratory Modelling of Waves. ITTC-Recommended Procedures and Guidelines. 2021. Available online: https://www.ittc.info/media/9697/75-02-07-012.pdf (accessed on 15 August 2022).
- ITTC 7.5-02-07-02.3. Experiments on Rarely Occurring Events. ITTC-Recommended Procedures and Guidelines. 2021. Available online: https://www.ittc.info/media/9709/75-02-07-023.pdf (accessed on 15 August 2022).
- Prpiĉ-Oršiĉ, J.; Sasa, K.; Valčiĉ, M.; Faltinsen, O.M. Uncertainties of ship speed loss evaluation under real weather conditions. J. Offshore Mech. Arct. Eng. 2020, 142, 031106. [Google Scholar] [CrossRef]
- Lu, L.; Sasa, K.; Sasaki, W.; Terada, D.; Mizojiri, T. Rough wave simulation and validation using onboard ship motion data in the southern hemisphere to enhance ship weather routing. Ocean Eng. 2017, 144, 61–77. [Google Scholar] [CrossRef]
- ITTC. Seakeeping Committee: Final Report and Recommendations to the 27th ITTC. 2014. Available online: https://www.ittc.info/media/6121/7-seakeeping-committee.pdf (accessed on 1 August 2022).
- Kitagawa, Y.; Tanizawa, K.; Tsukada, Y. Development of an experimental methodology for self-propulsion test with a marine diesel engine simulator. In Proceedings of the Third Report—Auxiliary Thruster System, 24th ISOPE Conference, Busan, Korea, 15–20 June 2014; Volume 3, pp. 691–696. [Google Scholar]
- Lungu, A. Numerical Investigation of the Roll Decay of a Container Ship Moving with Forward Speed in Calm Water. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Volume 2: CFD and FSI, V002T08A011, Glasgow, Scotland, 9–14 June 2019. Paper OMAE2019-95240. [Google Scholar] [CrossRef]
- Lungu, A. Unsteady Numerical Simulation of the Behavior of a Ship Moving in Head Sea. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Volume 2: CFD and FSI, V002T08A010, Glasgow, Scotland, 9–14 June 2019. Paper OMAE2019-95239. [Google Scholar] [CrossRef]
- Zou, L.; Larsson, L. Additional data for resistance, sinkage and trim. In Numerical Ship Hydrodynamics—An Assessment of the Gothenburg 2010 Workshop; Larsson, L., Stern, F., Visonneau, M., Eds.; Springer Business Media: Dordrecht, The Netherlands, 2014. [Google Scholar] [CrossRef]
- Simonsen, C.; Otzen, J.; Stern, F. EFD and CFD for KCS heaving and pitching in regular head waves. In Proceedings of the 27th Symposium Naval Hydrodynamics, Seoul, Korea, 5–10 October 2008. [Google Scholar]
- Hino, T.; Stern, F.; Larsson, L.; Visonneau, M.; Hirata, H.; Kim, J. (Eds.) Numerical Ship Hydrodynamics: An Assessment of the Tokyo 2015 Workshop; Springer Nature: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Hino, T.; Stern, F.; Larsson, L.; Visonneau, M.; Hirata, H.; Kim, J. Tokyo 2015—A Workshop on CFD in Ship Hydrodynamics; Tokyo, Japan. 2015. Available online: https://www.t2015.nmri.go.jp/kcs_gc.html (accessed on 1 September 2022).
- Van Walree, F.; Serani, A.; Diez, M.; Stern, F. Prediction of heavy weather seakeeping of a destroyer hull form by means of time domain panel and CFD codes. In Proceedings of the 33rd Symposium on Naval Hydrodynamics, Osaka, Japan, 18–23 October 2020. [Google Scholar]
- Kim, W.J.; Van, S.H.; Kim, D.H. Measurement of flows around modern commercial ship models. Exp. Fluids 2001, 31, 567–578. [Google Scholar] [CrossRef]
- Hino, T. (Ed.) Proceedings of CFD Workshop Tokyo 2005; NMRI Report; NMRI: Tokyo, Japan, 2005. [Google Scholar]
- Larsson, L.; Stern, F.; Visonneau, M. (Eds.) Numerical Ship Hydrodynamics—An Assessment of the Gothenburg 2010 Workshop; Springer Business Media: Dordrecht, The Netherlands, 2014. [Google Scholar] [CrossRef]
- Simonsen, C.; Otzen, J.; Joncquez, S.; Stern, F. EFD and CFD for KCS heaving and pitching in regular head waves. J. Mar. Sci. Technol. 2013, 18, 435–459. [Google Scholar] [CrossRef]
- Przulj, V.; Basara, B. Bounded Convection Schemes for Unstructured Grids. In Proceedings of the 15th AIAA Computational Fluid Dynamics Conference, Anaheim, CA, USA, 11–14 June 2001. [Google Scholar]
- Leonard, B.P. A stable and accurate convective modelling procedure based on quadratic upstream interpolation. Comput. Methods Appl. Mech. Eng. 1979, 19, 59–98. [Google Scholar] [CrossRef]
- Jasak, H.; Weller, H.; Gosman, A. High Resolution NVD Differencing Scheme for Arbitrarily Unstructured Meshes. Int. J. Numer. Meth. Fluids 1999, 31, 431–449. [Google Scholar] [CrossRef]
- Lungu, A. Large Flow Separations around a Generic Submarine in Static Drift Motion Resolved by Various Turbulence Closure Models. J. Mar. Sci. Eng. 2022, 10, 198. [Google Scholar] [CrossRef]
- Eça, L.; Hoekstra, M. A procedure for the estimation of the numerical uncertainty of CFD calculations based on grid refinement studies. J. Comput. Phys. 2014, 262, 104–130. [Google Scholar] [CrossRef]
- Lungu, A.; Raad, P.E.; Mori, K. Turbulent early-stage breaking wave simulation. In Proceedings of the 1997 ASME Fluids Engineering, FEDSM’97, Vancouver, BC, Canada, 22–26 June 1997. FEDSM97-3404. [Google Scholar]

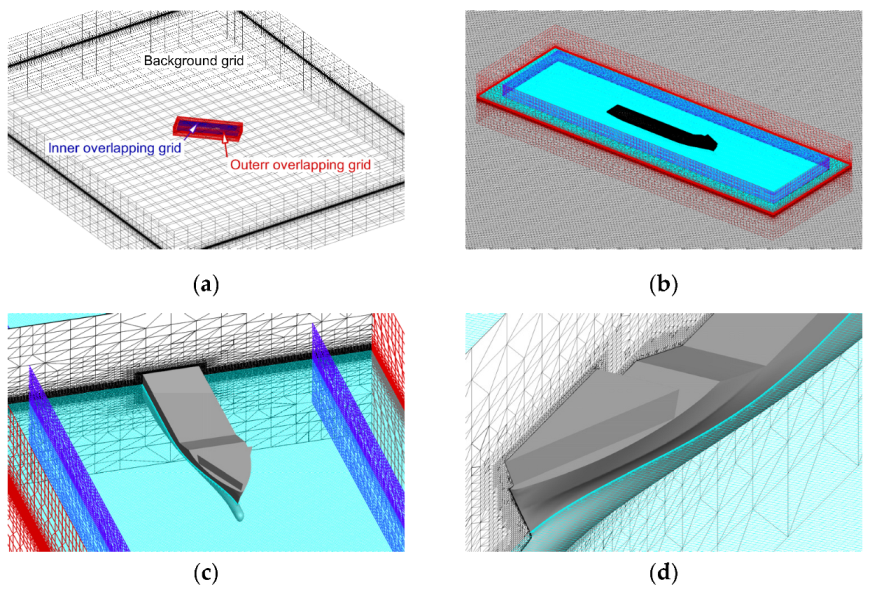
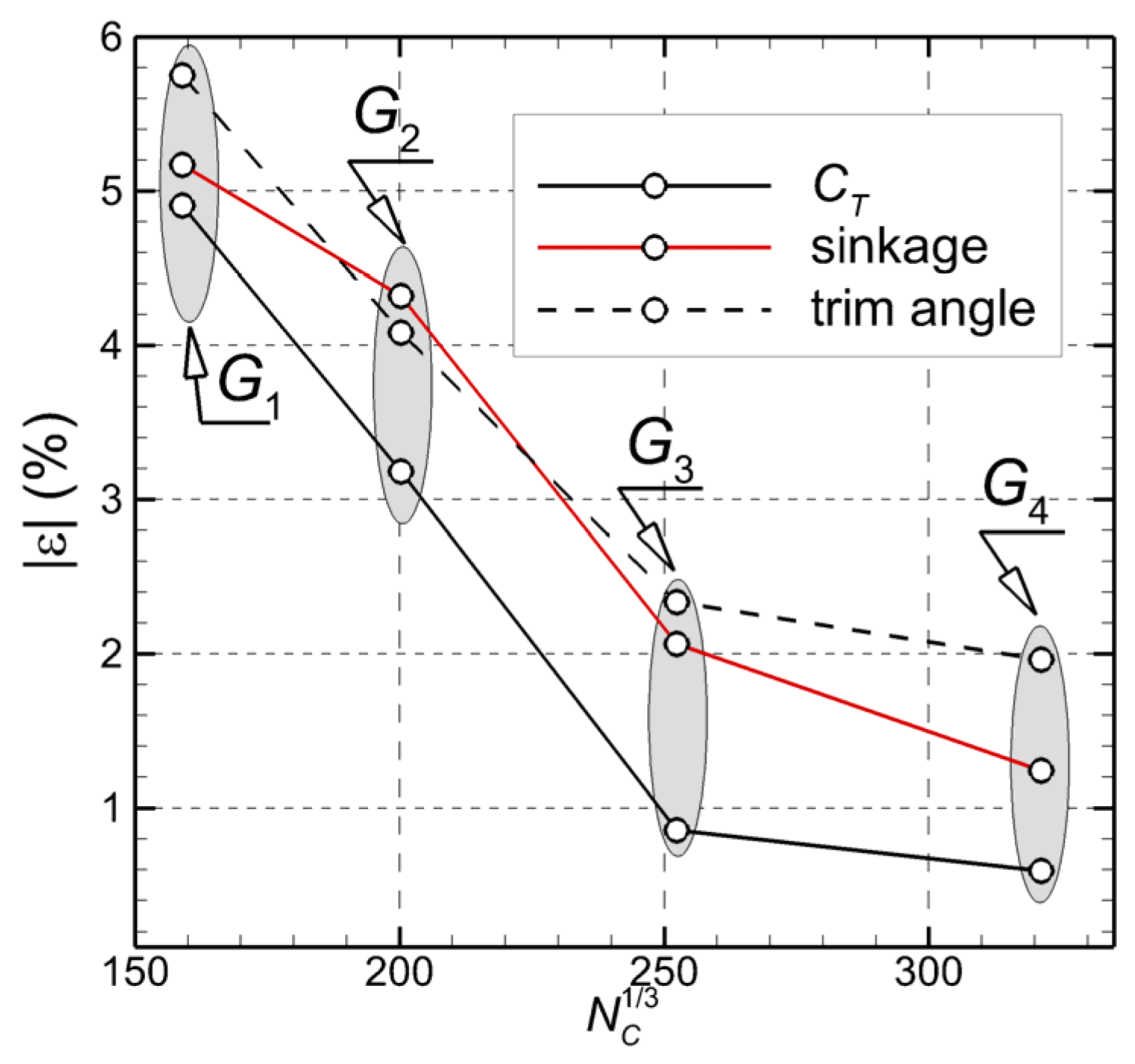
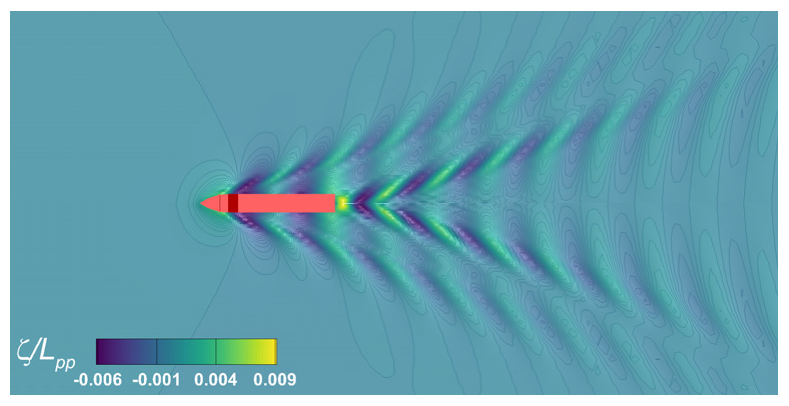
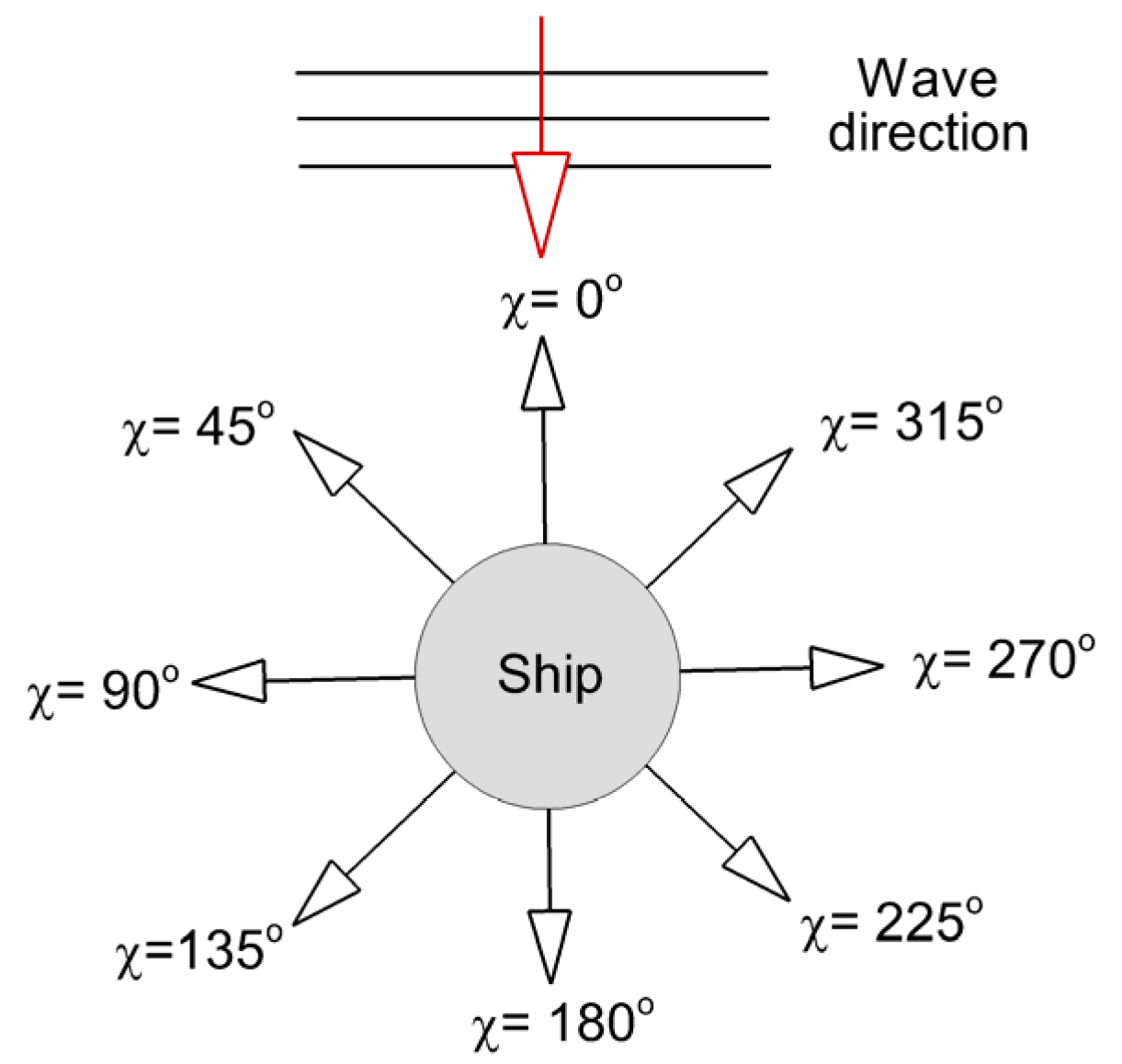
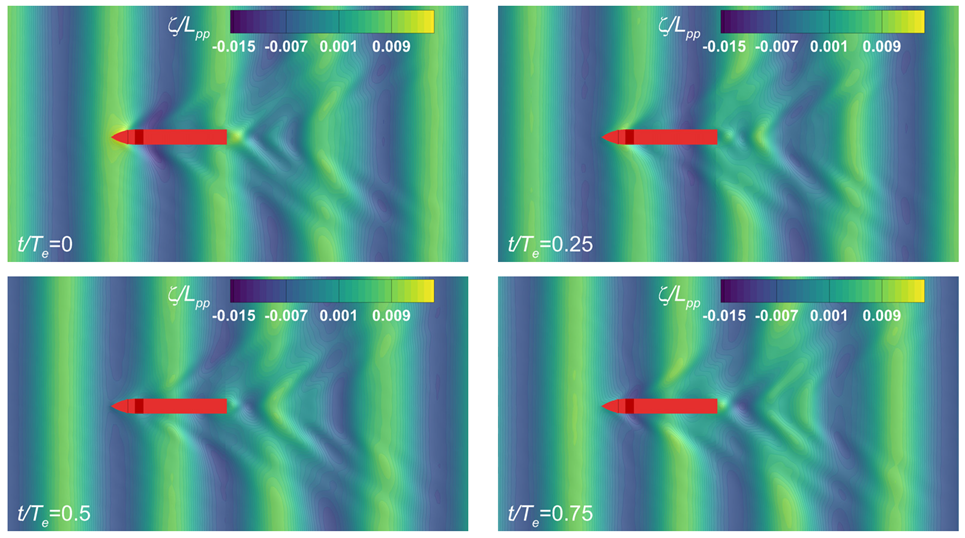
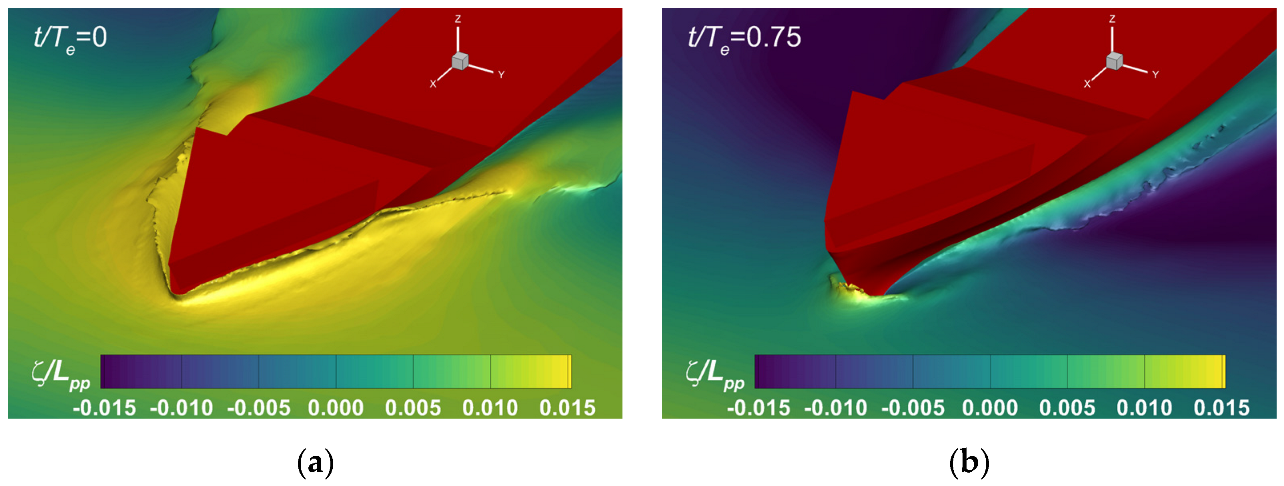
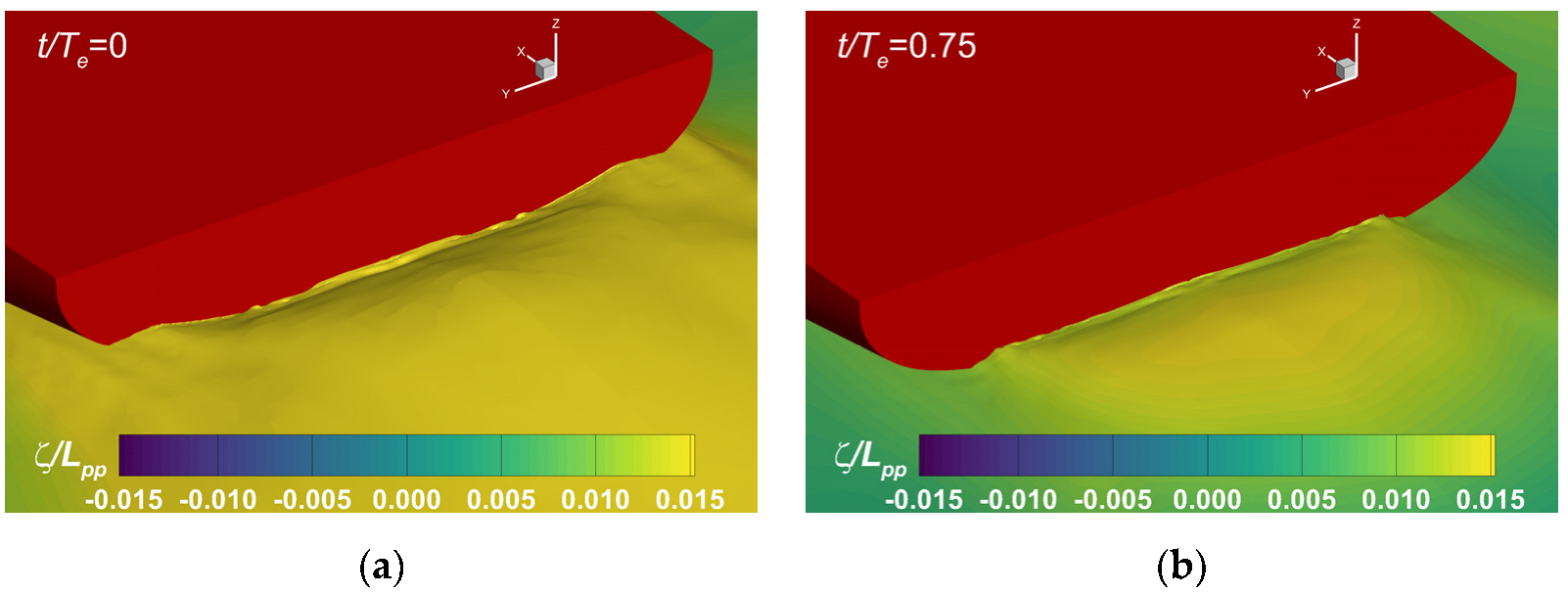
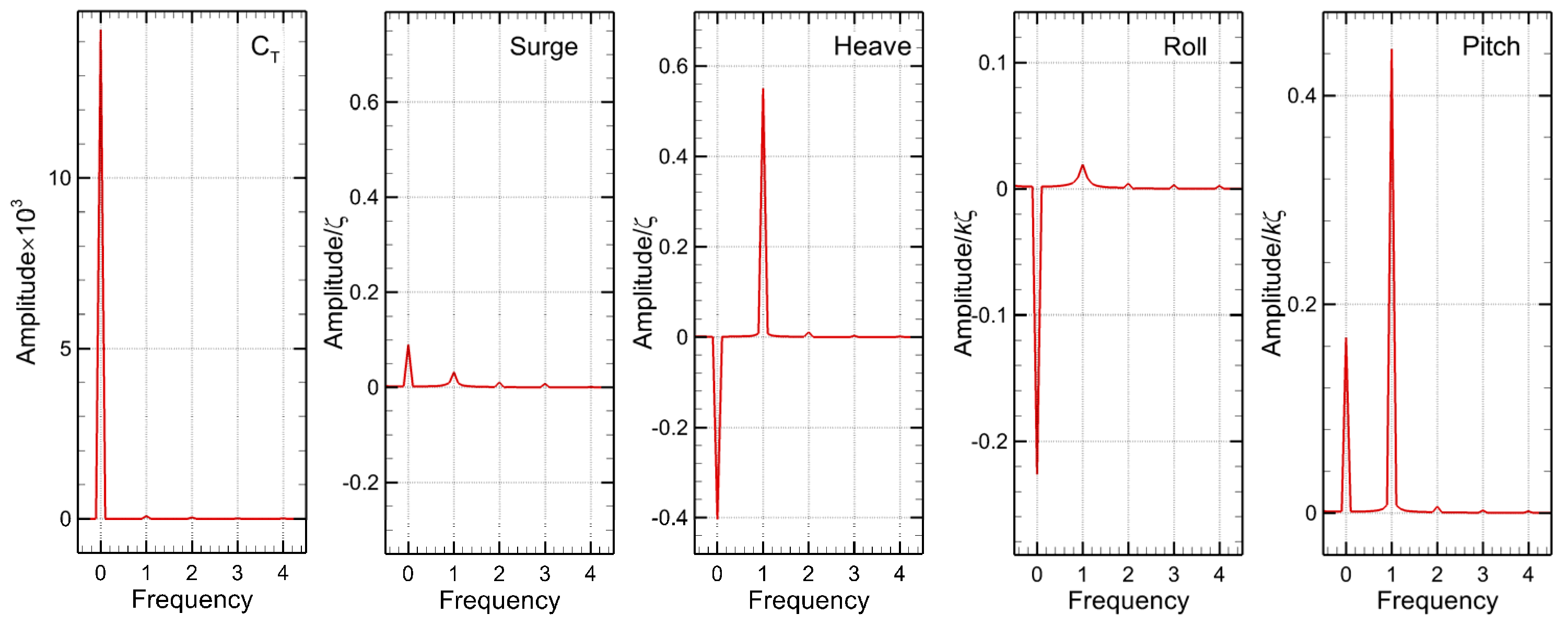
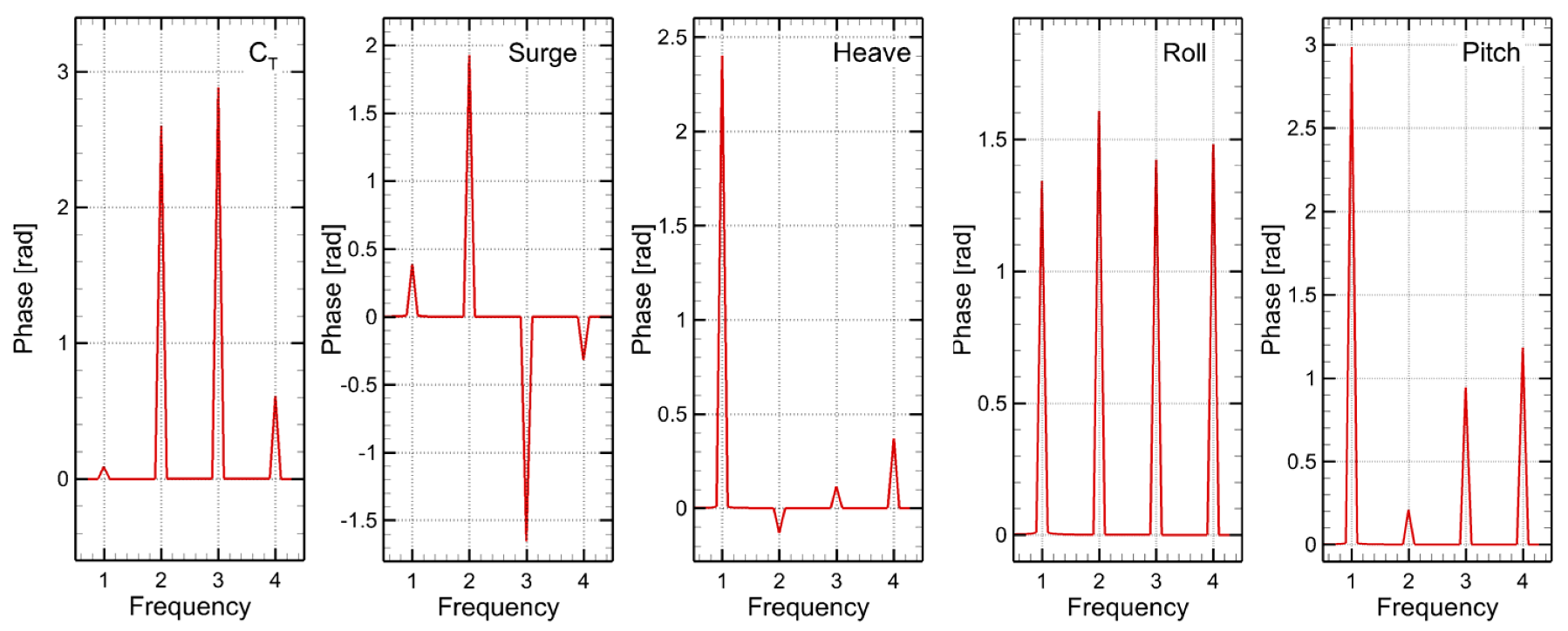
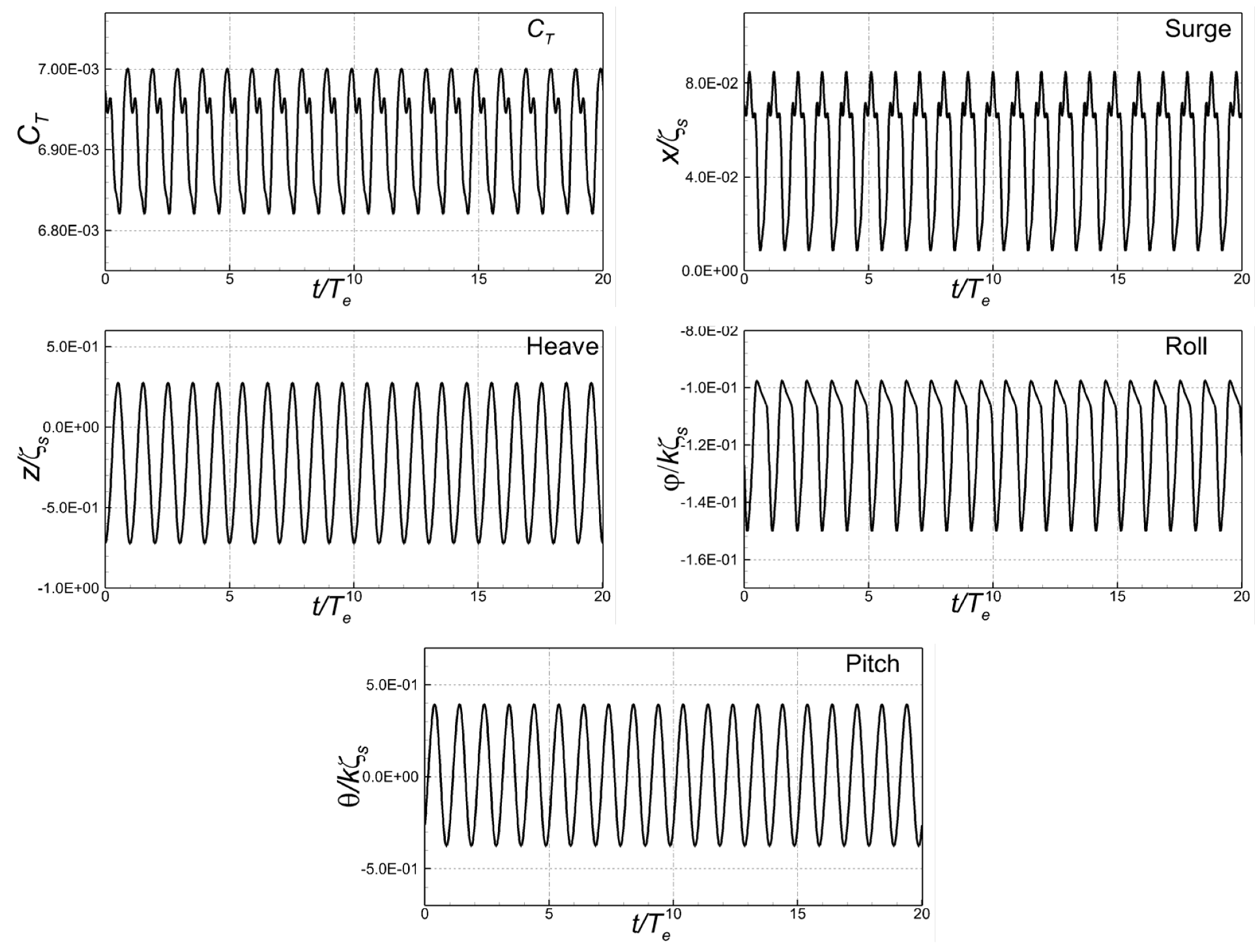
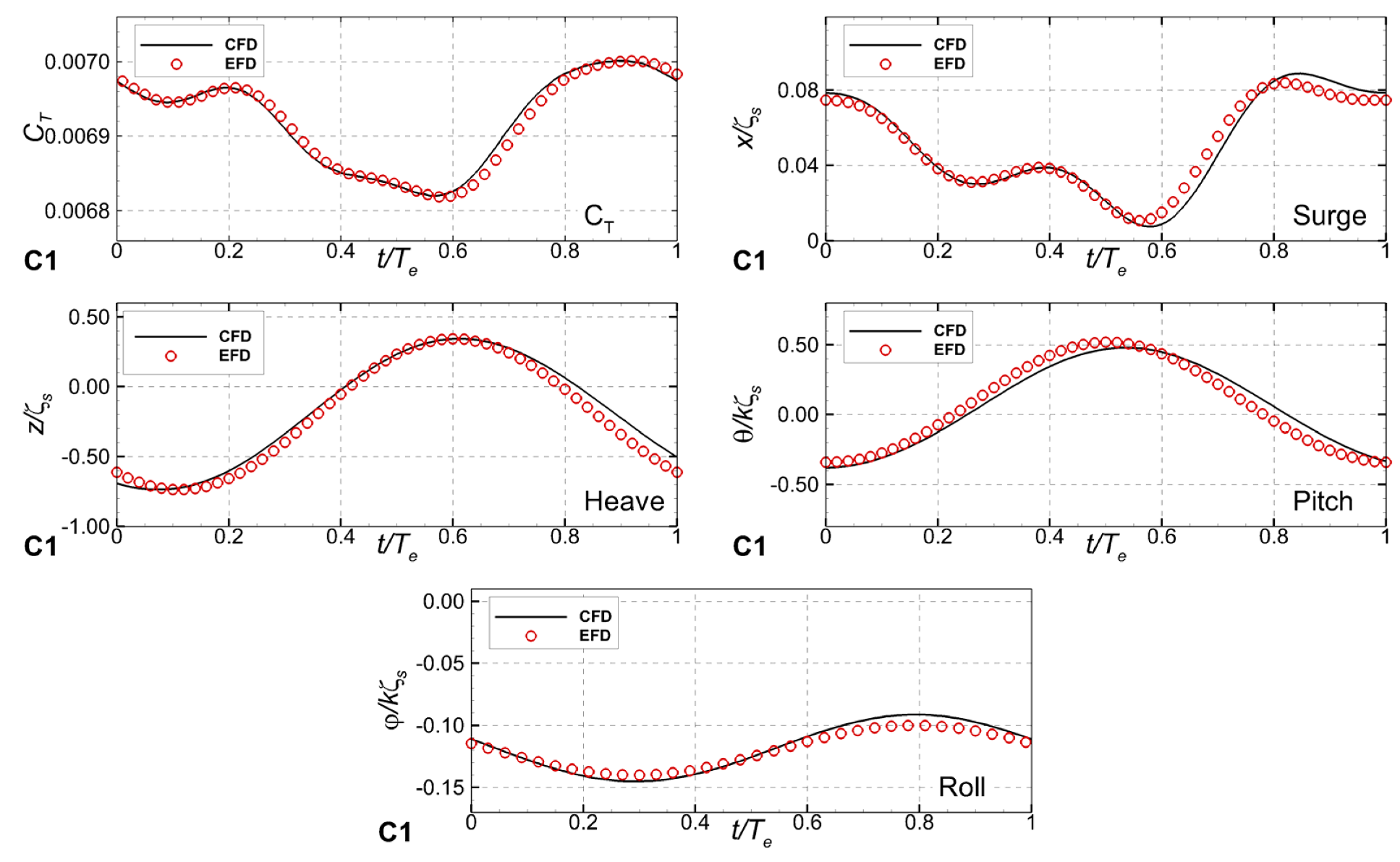
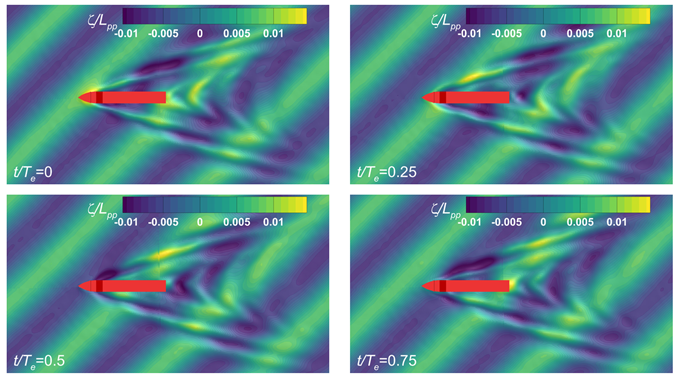
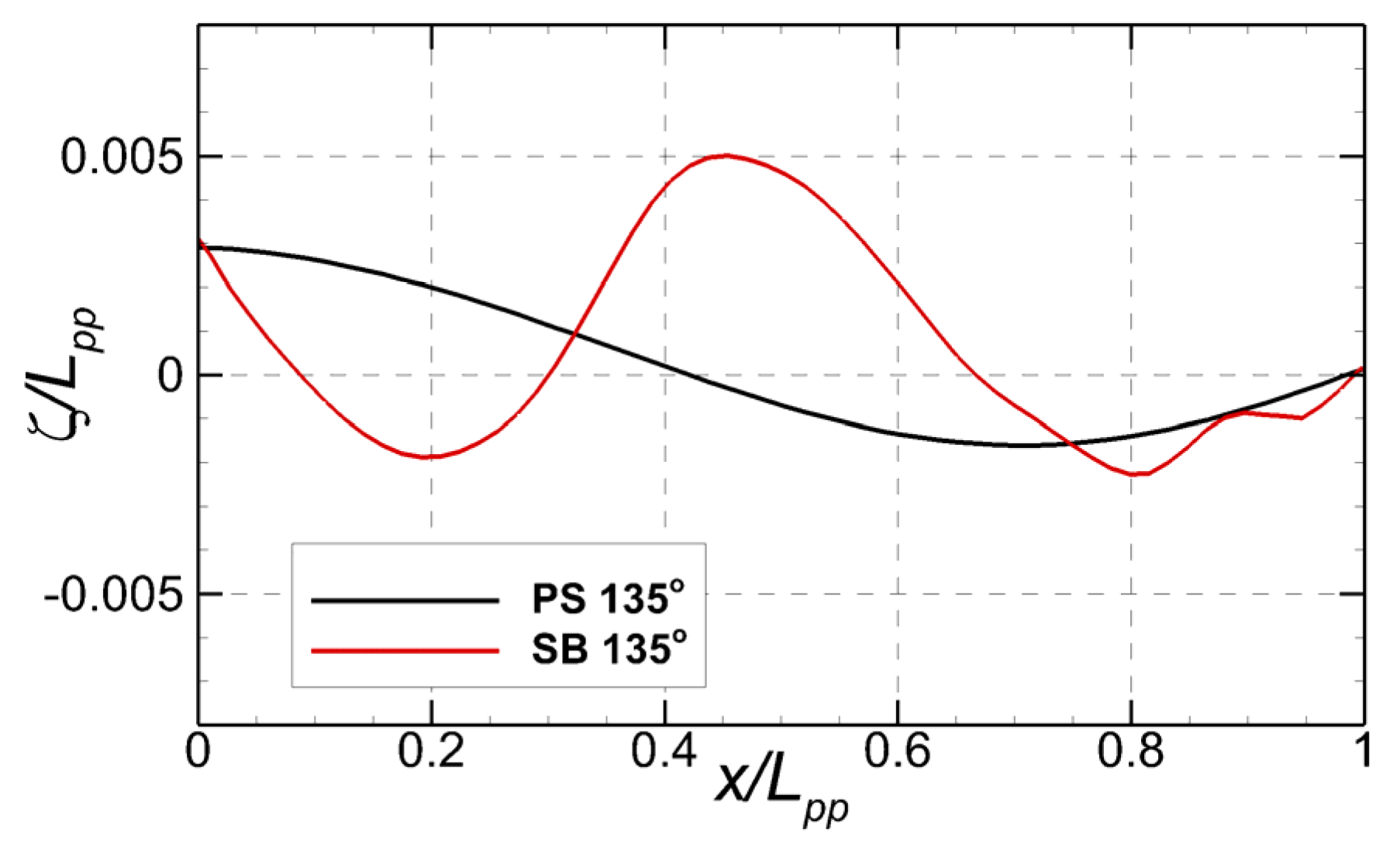
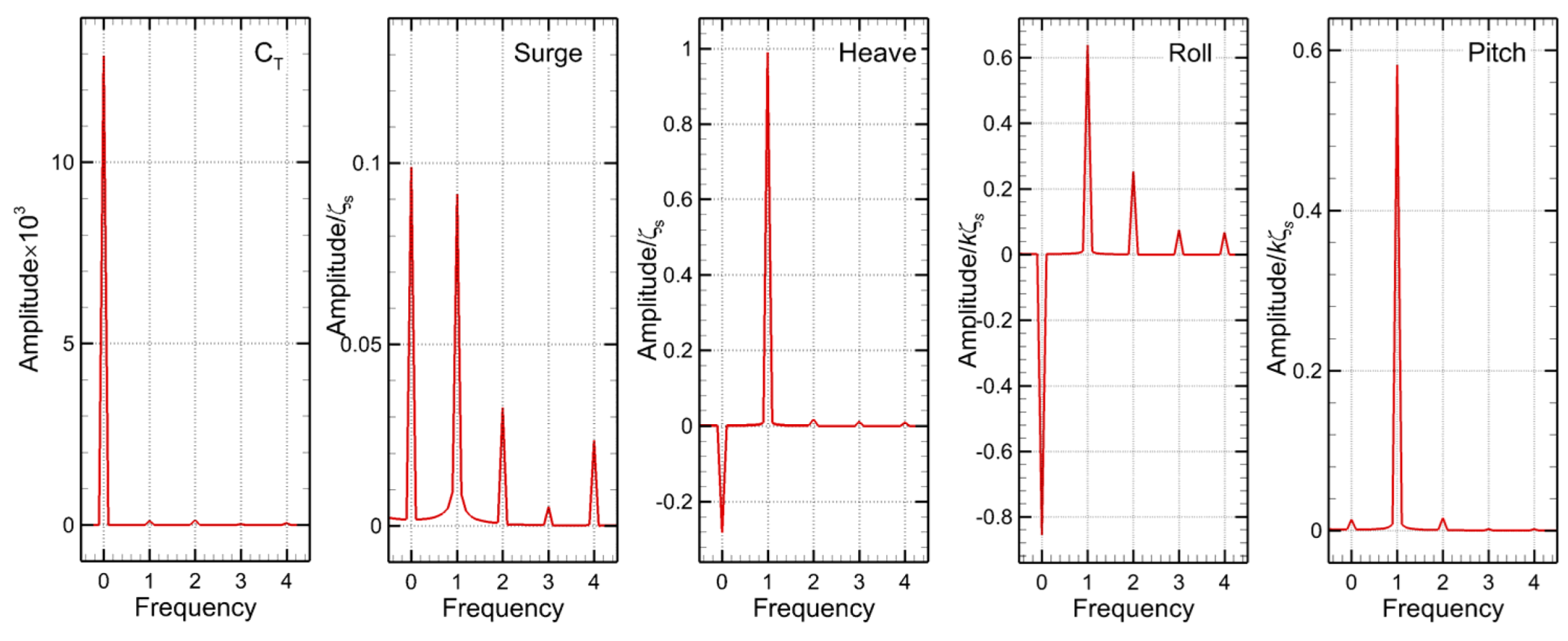
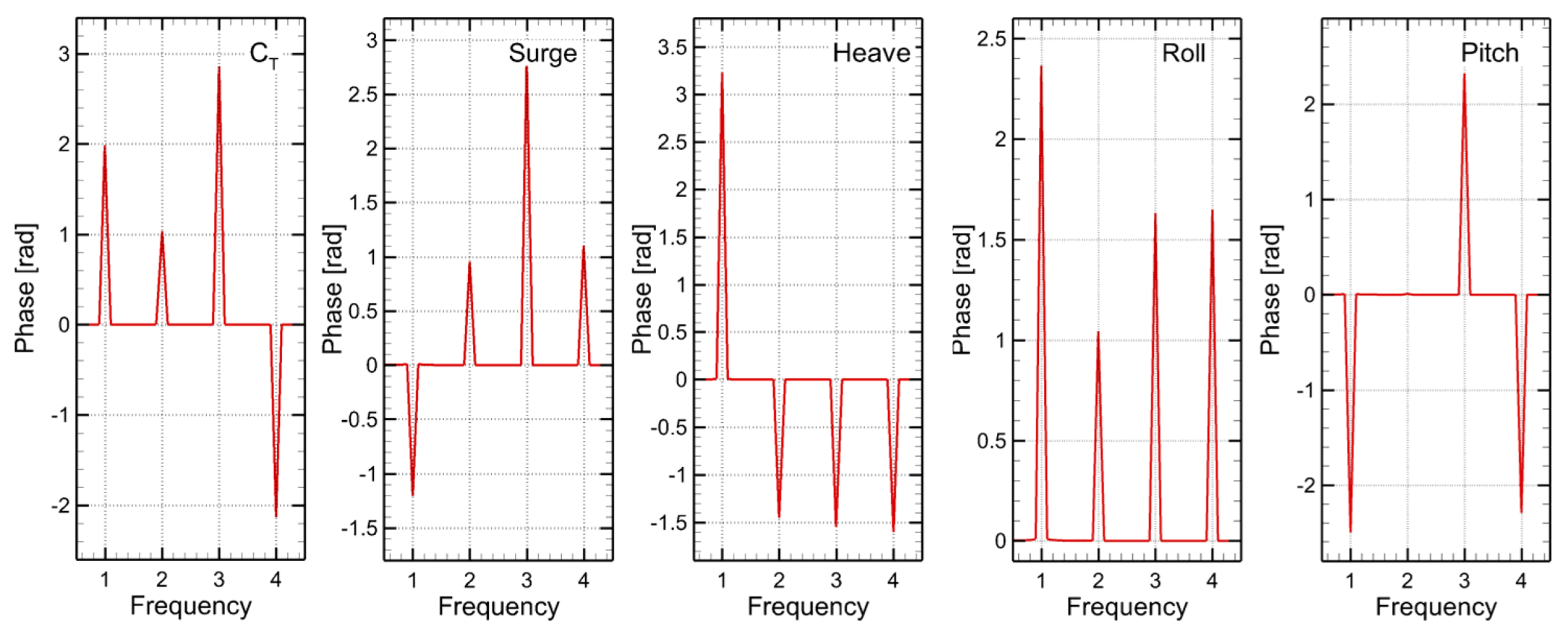
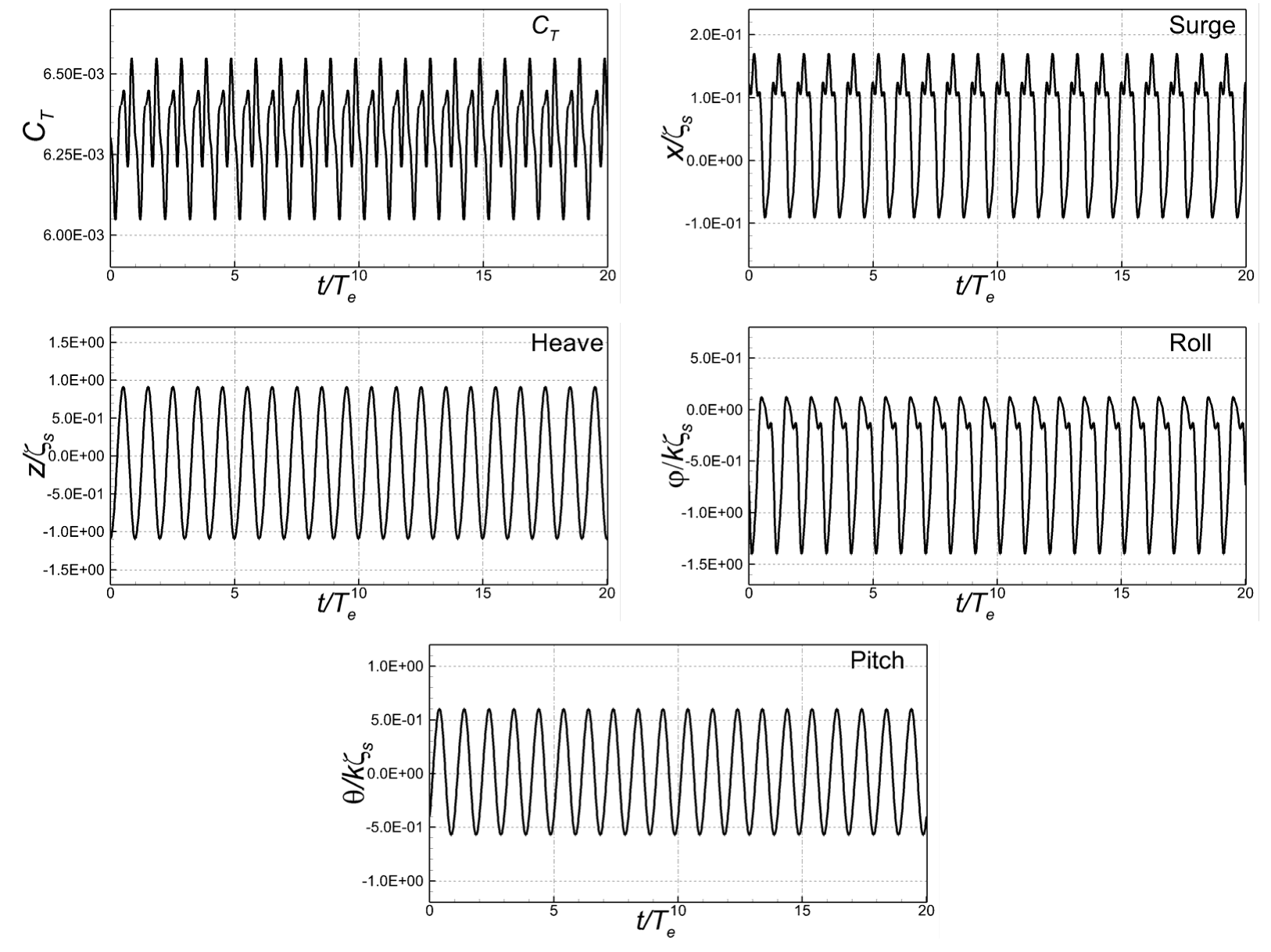
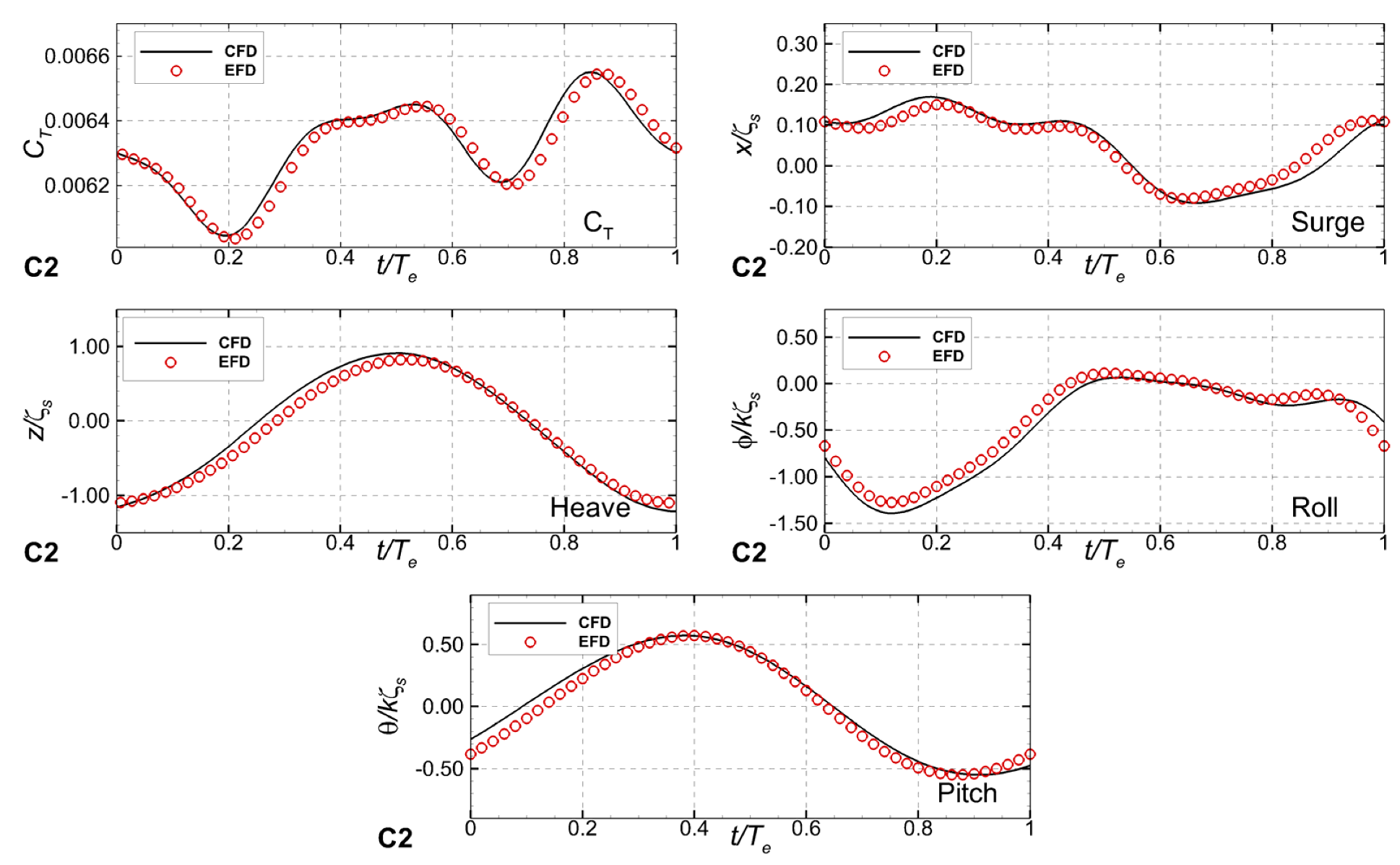
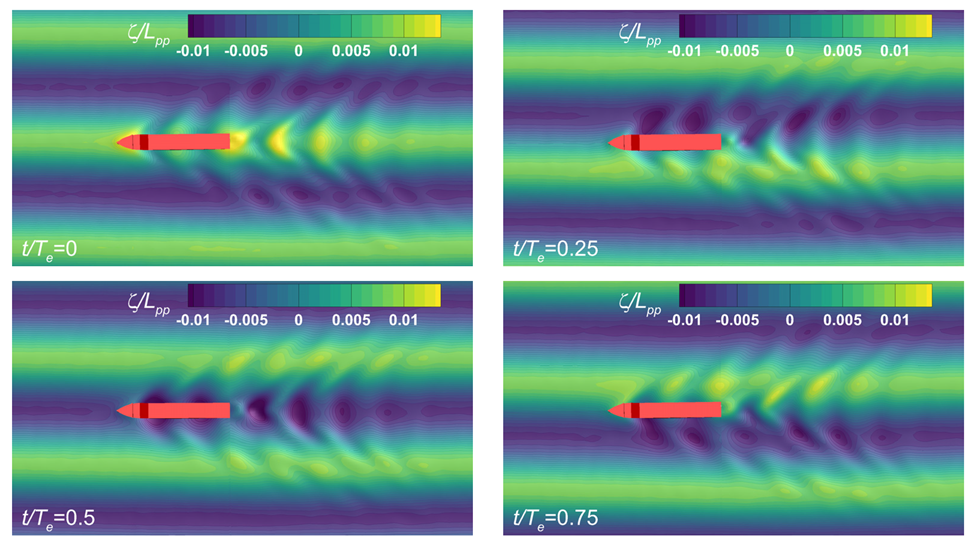
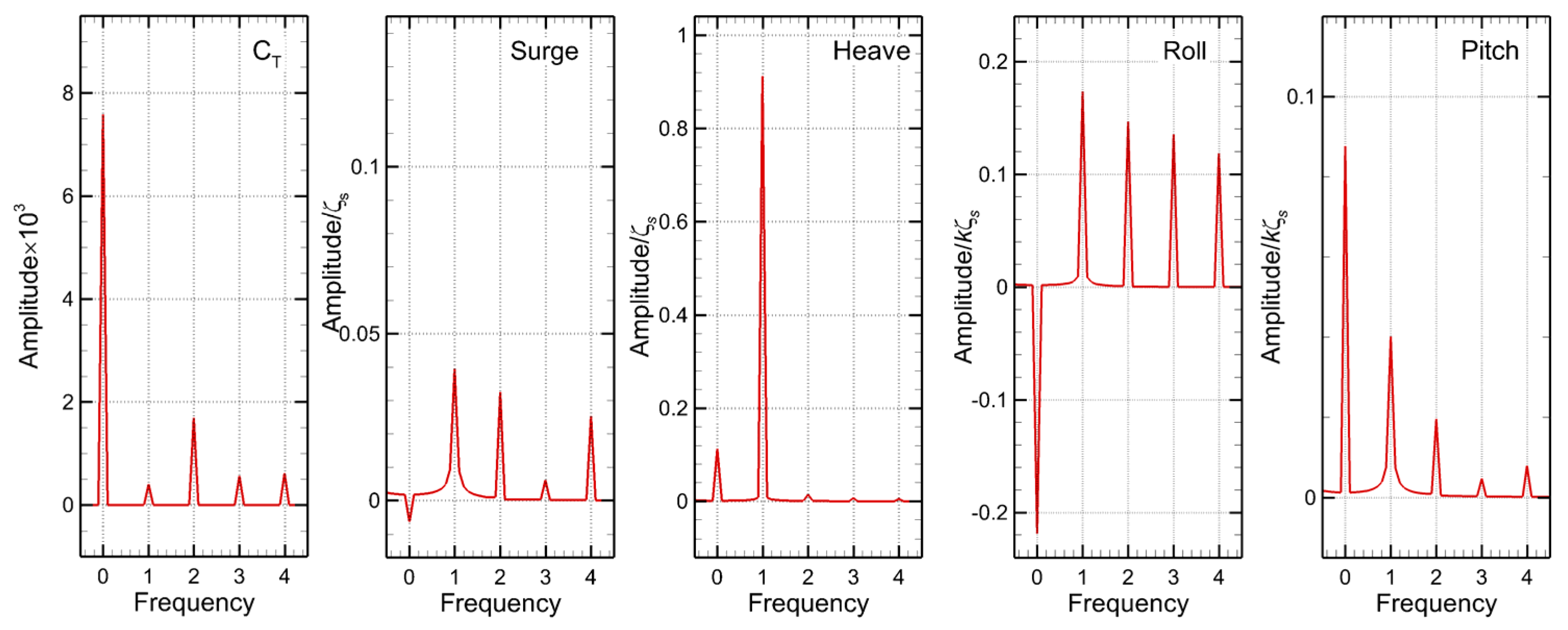
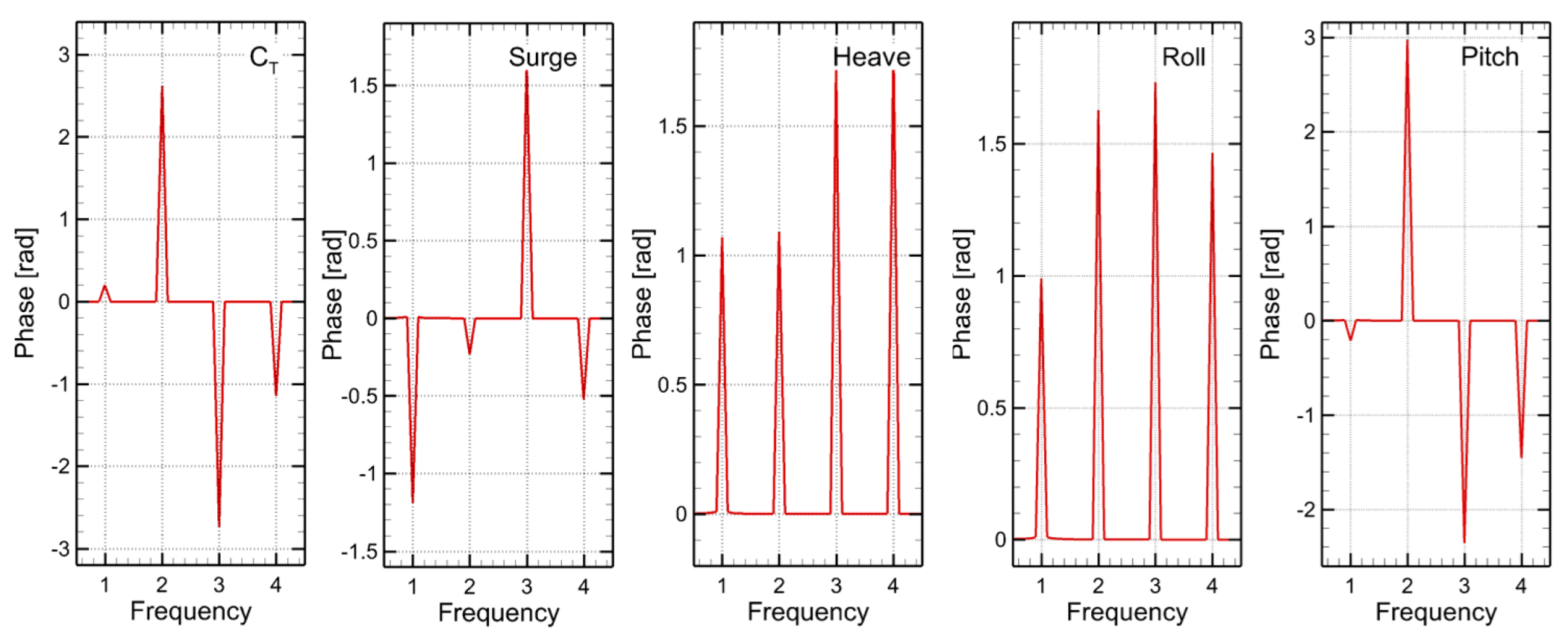
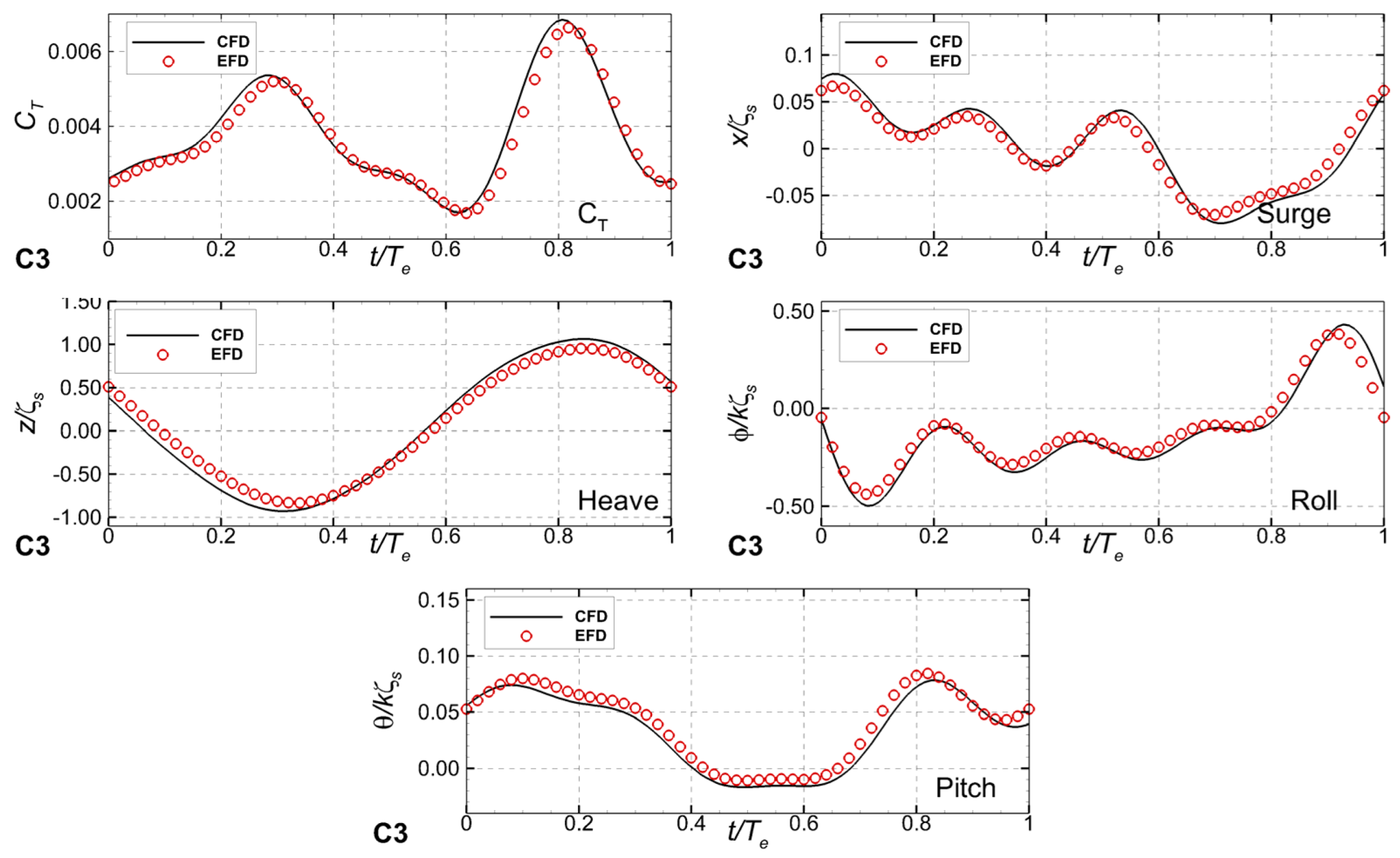
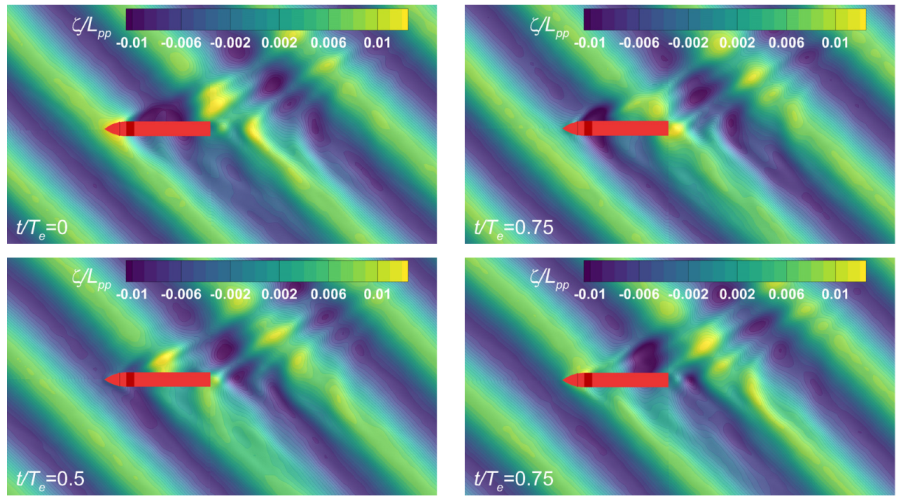
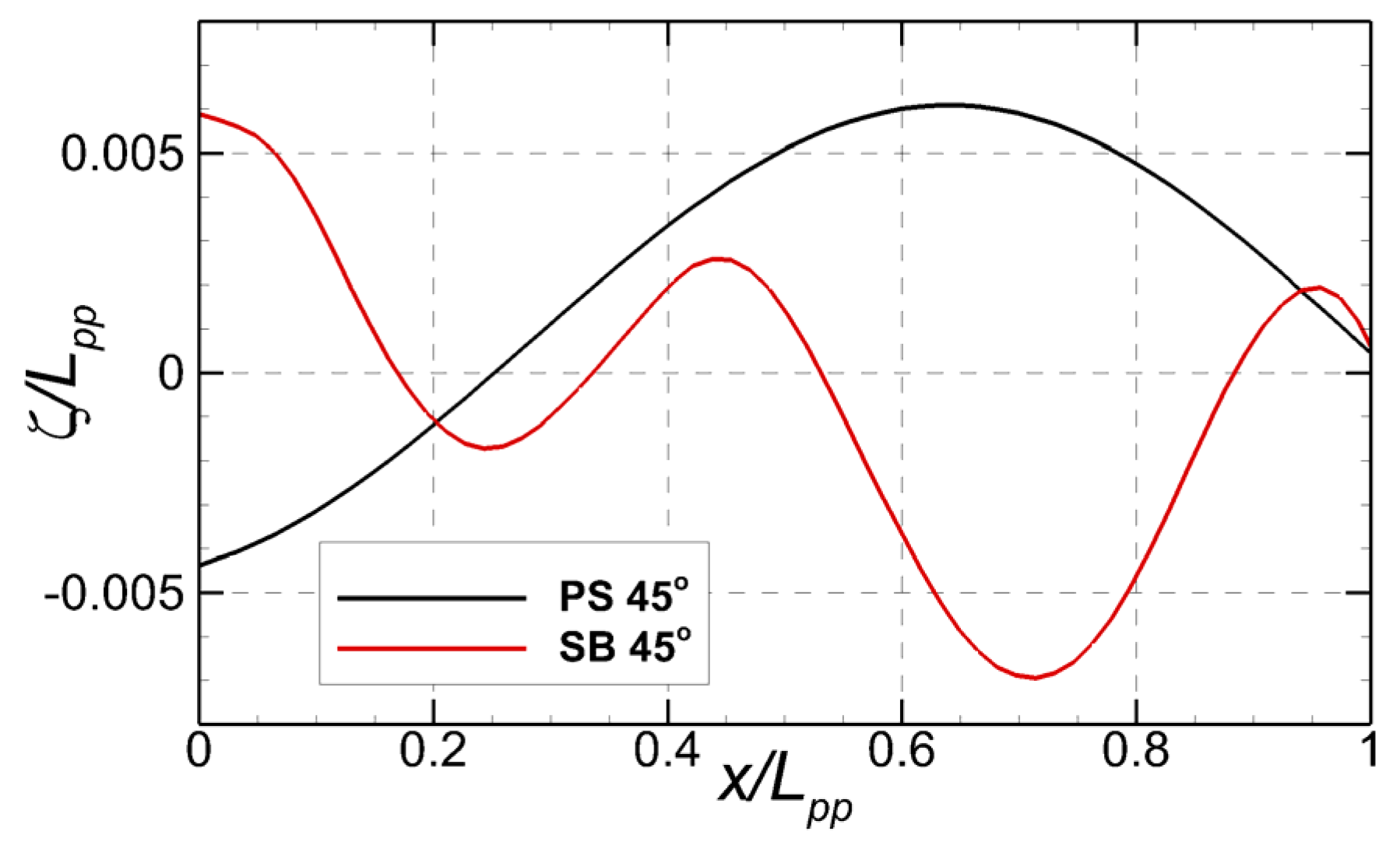
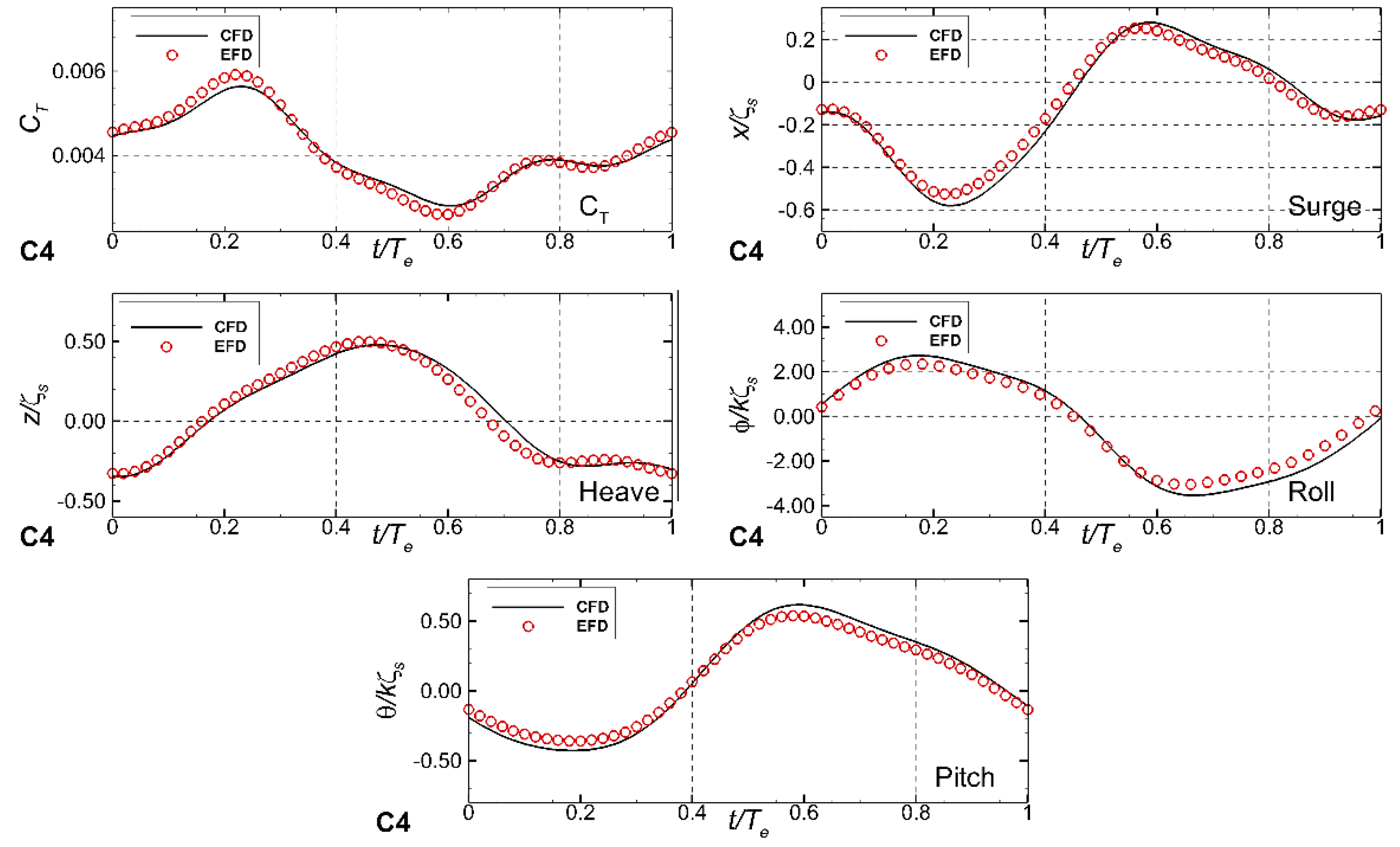
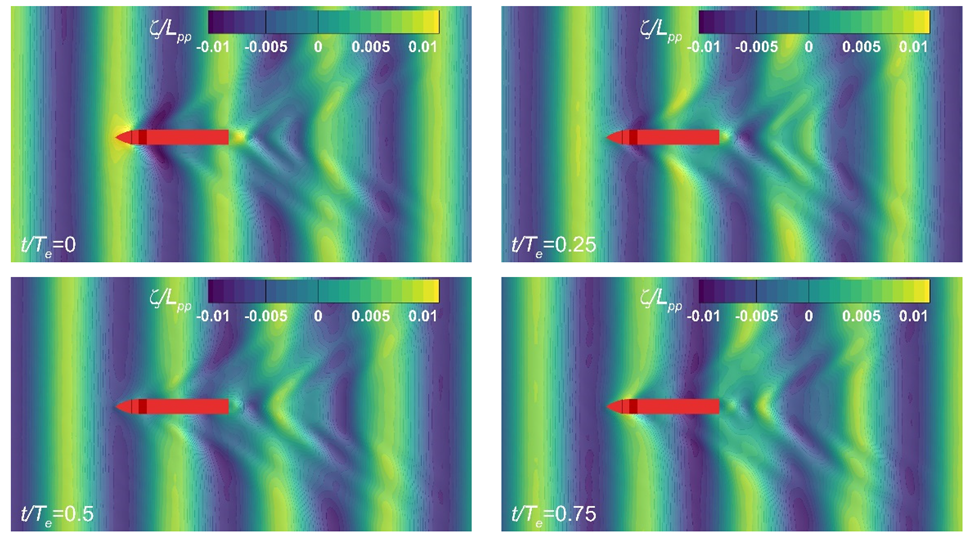
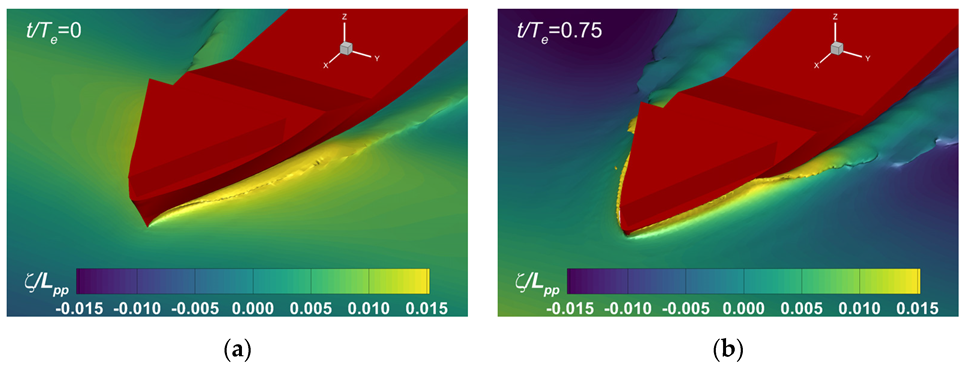
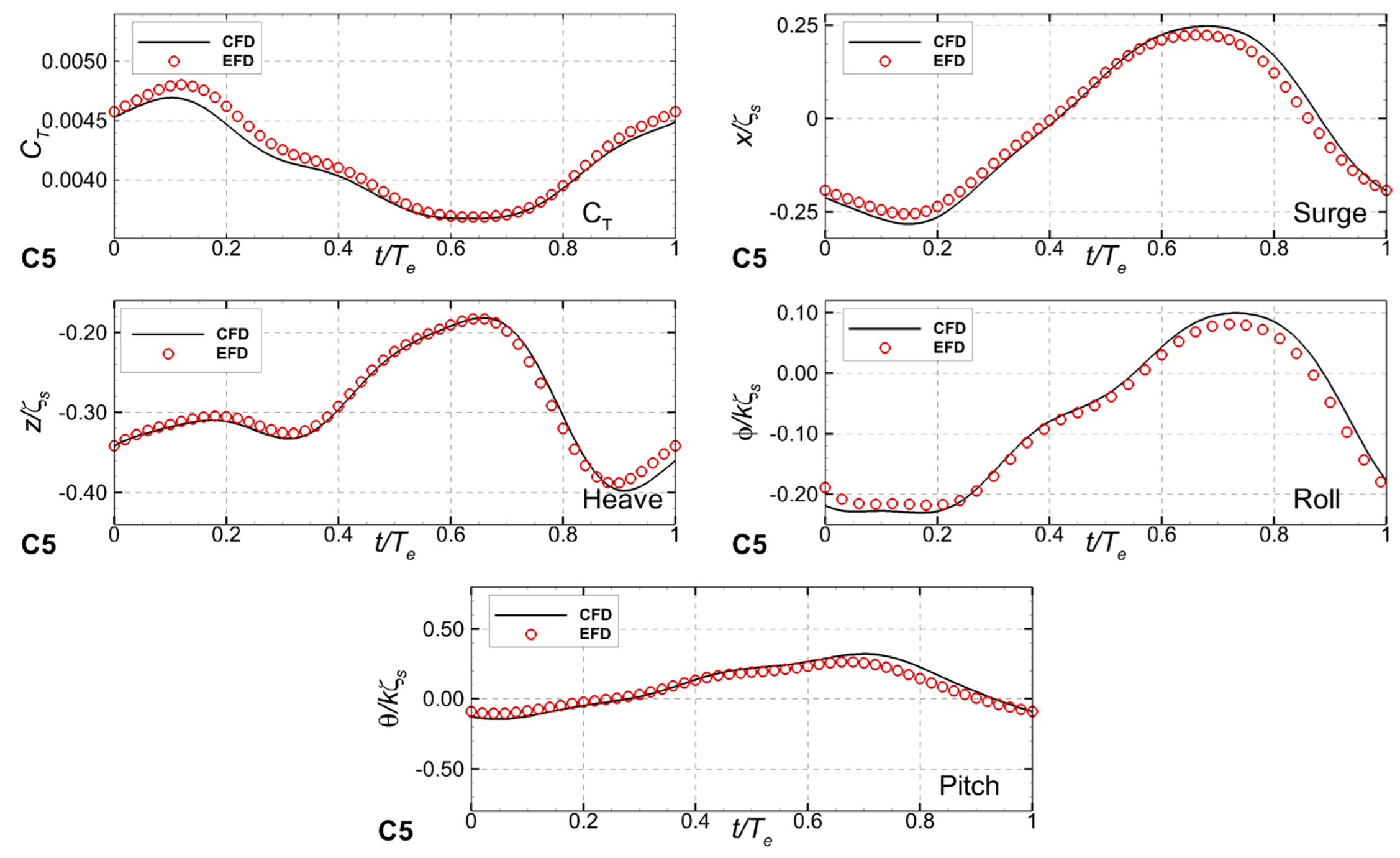
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).