An Energy Efficiency Optimization Strategy of Hybrid Electric Ship Based on Working Condition Prediction


Abstract
:1. Introduction
2. Model Construction
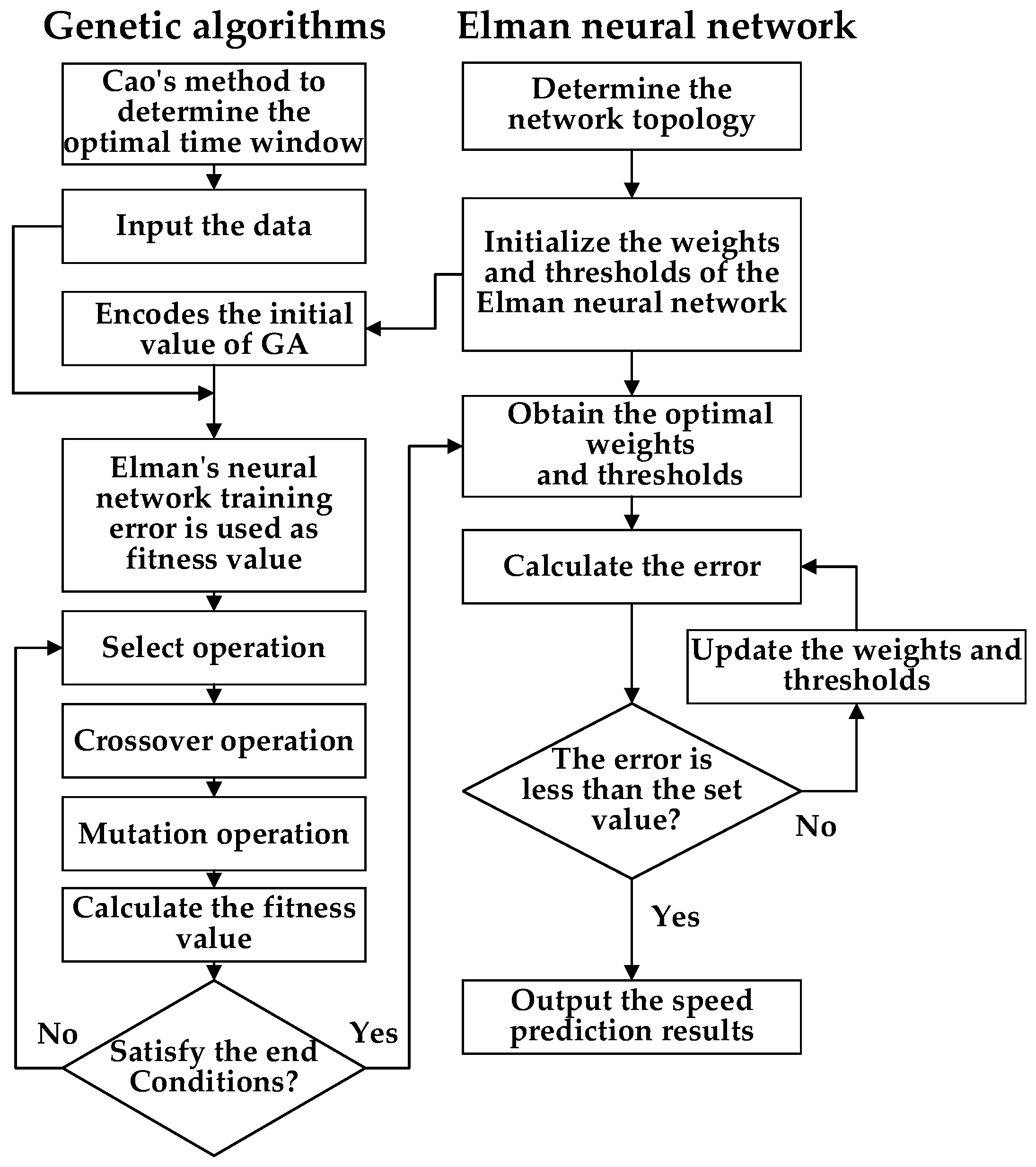
2.1. GA–Elman Neural Network Prediction Model
- (1)
- Working condition prediction model.
- (2)
- Ship speed prediction model.
2.2. Ship Energy Efficiency Model
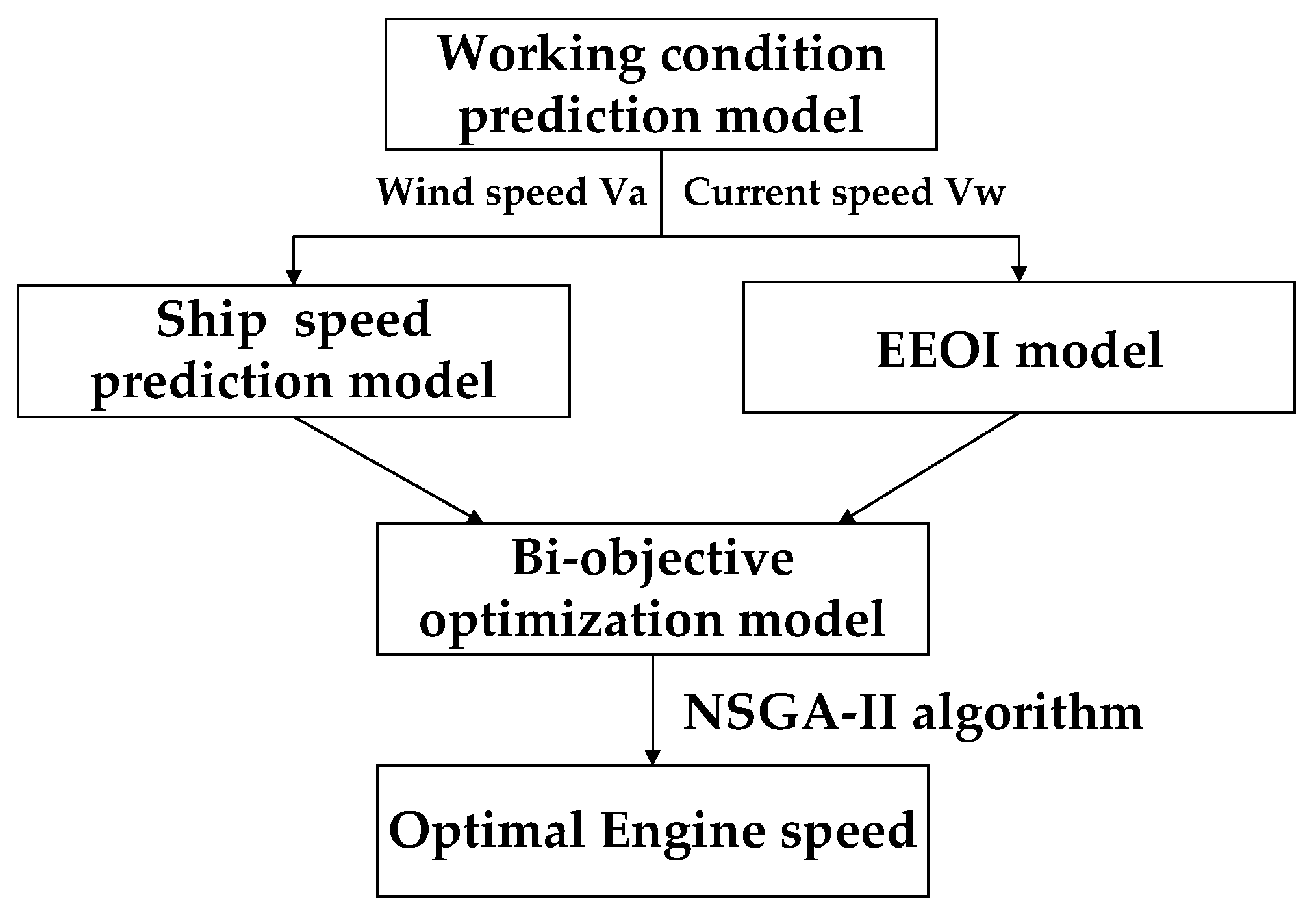
3. Real-Time Optimization Model of Ship Energy Efficiency
- (1)
- Establish the prediction model of working condition parameters, real-time speed model and EEOI model.
- (2)
- Predict the wind speed and current speed at the next moment based on the working condition model and the historical data of the ship.
- (3)
- Substitute the predicted values of the working condition parameters into the real-time speed prediction model and the EEOI model as input to determine the relationship between the main engine speed and the ship speed, and the relationship between the main engine speed and EEOI at the next time.
- (4)
- The NSGA-II algorithm is used to solve for the optimal speed of the main engine, to calculate and obtain the main engine speed that minimizes the predicted value of the integrated objective function, and to set the main engine to operate at the optimized speed in real time to realize the real-time optimization of the hybrid electric ship.
4. Case Study
4.1. Data Acquisition
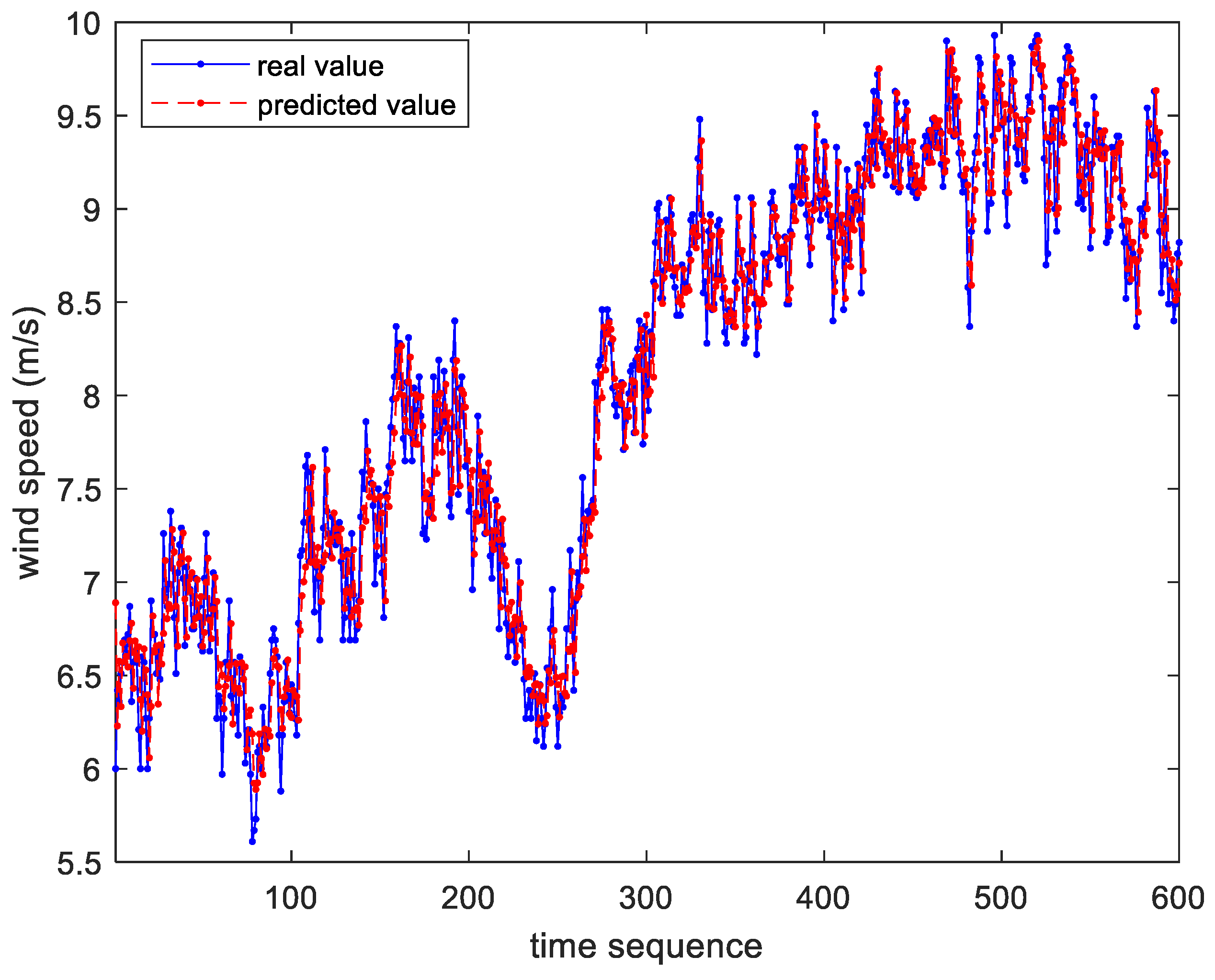
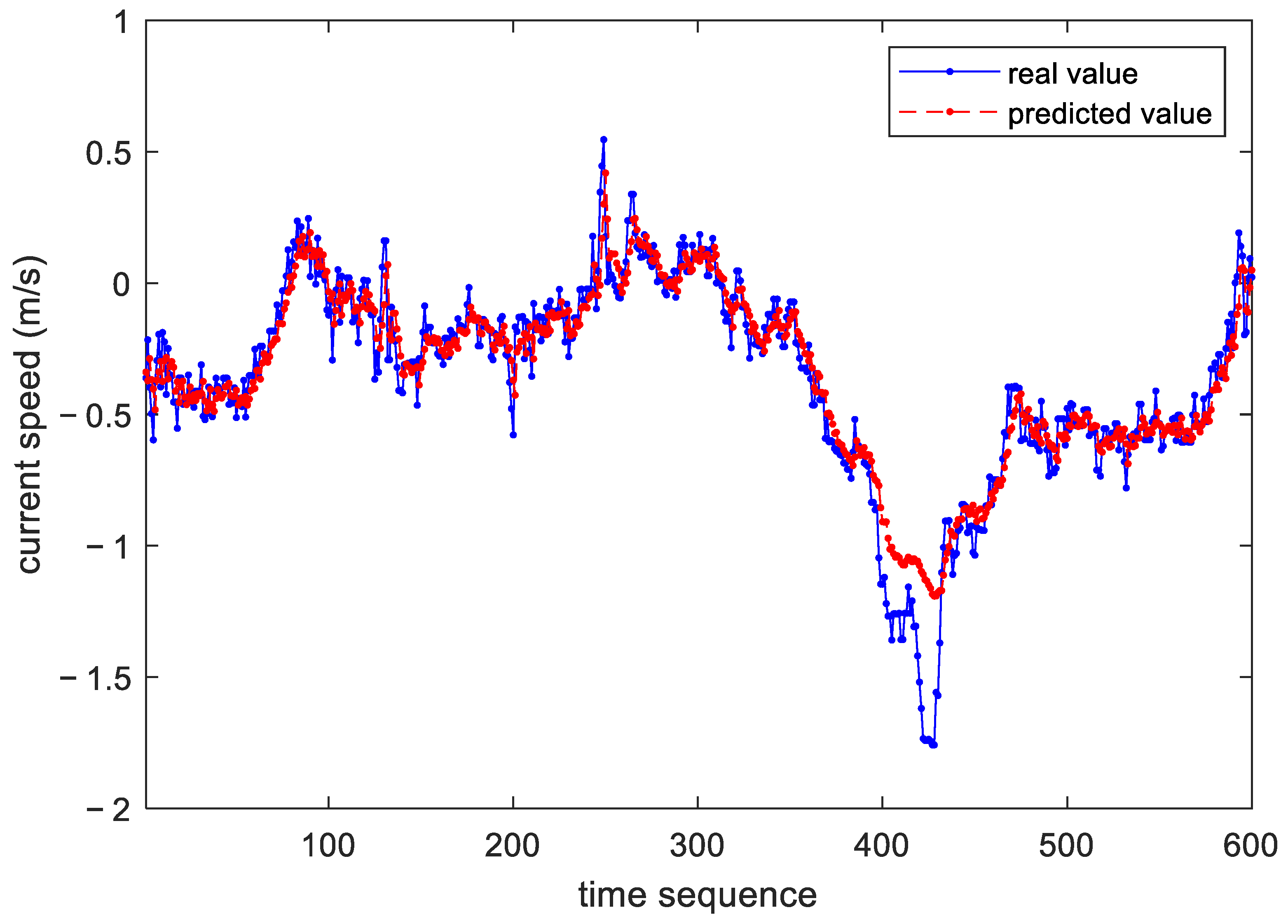
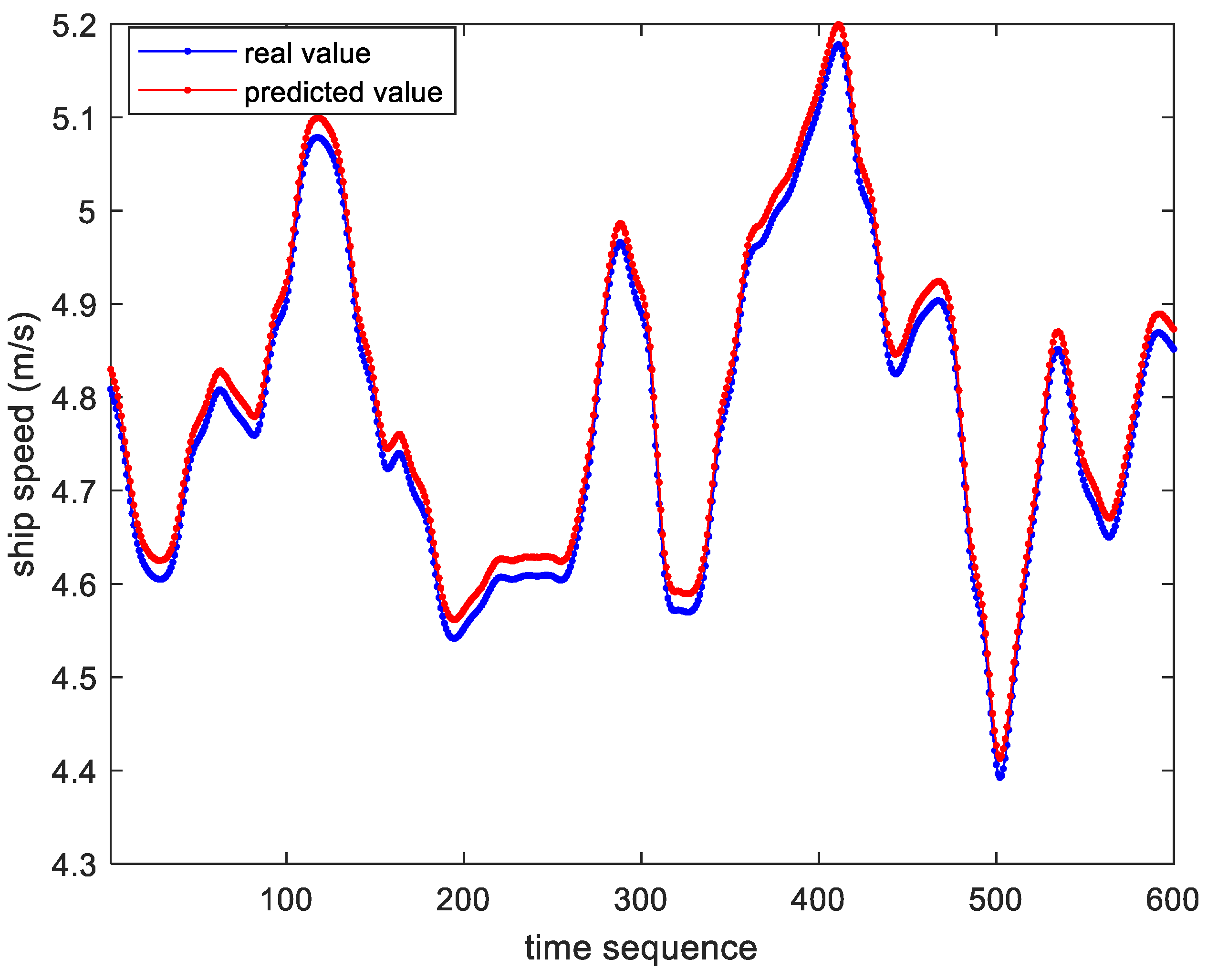
4.2. Working Condition Prediction and Ship Speed Prediction
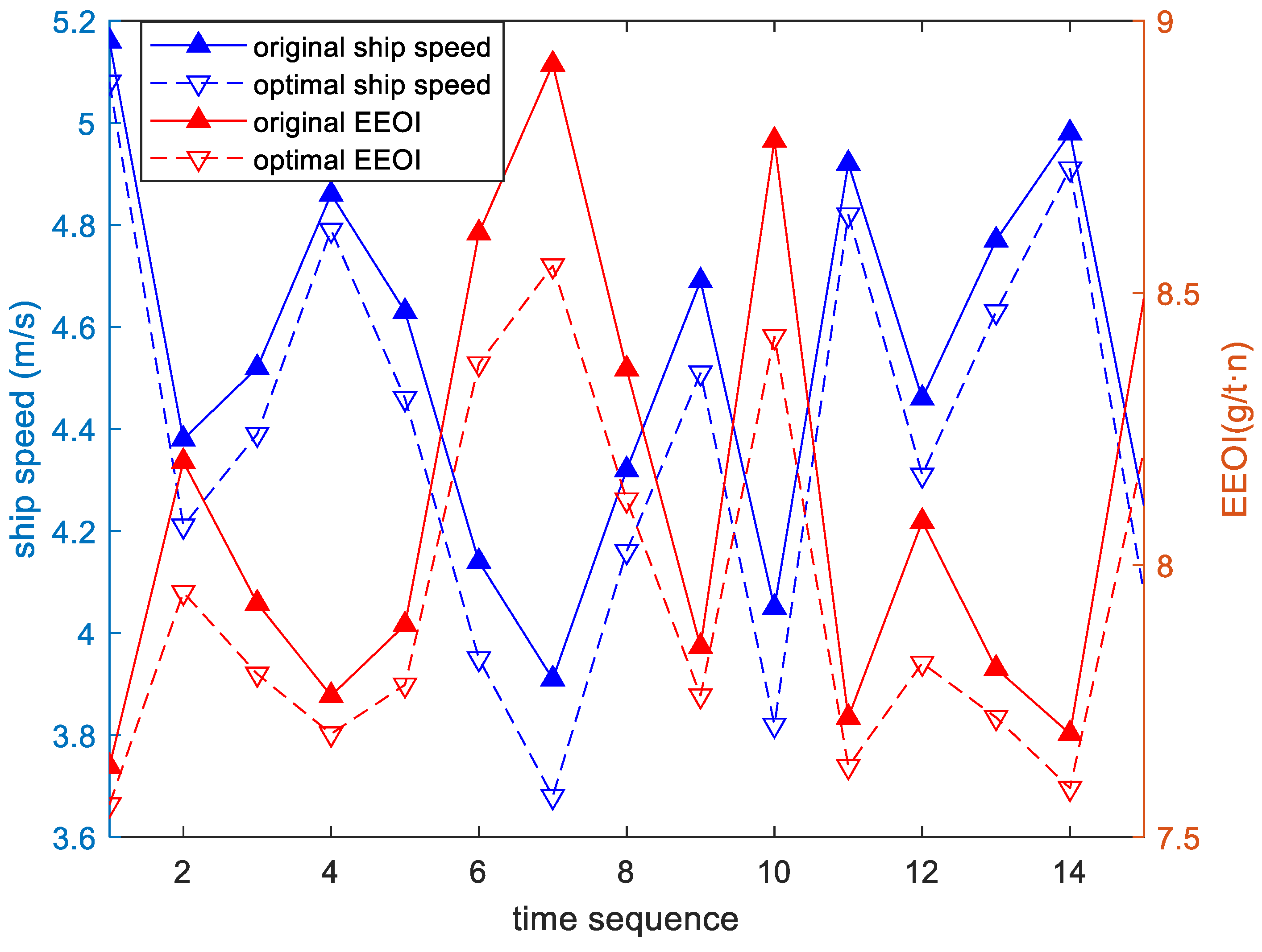
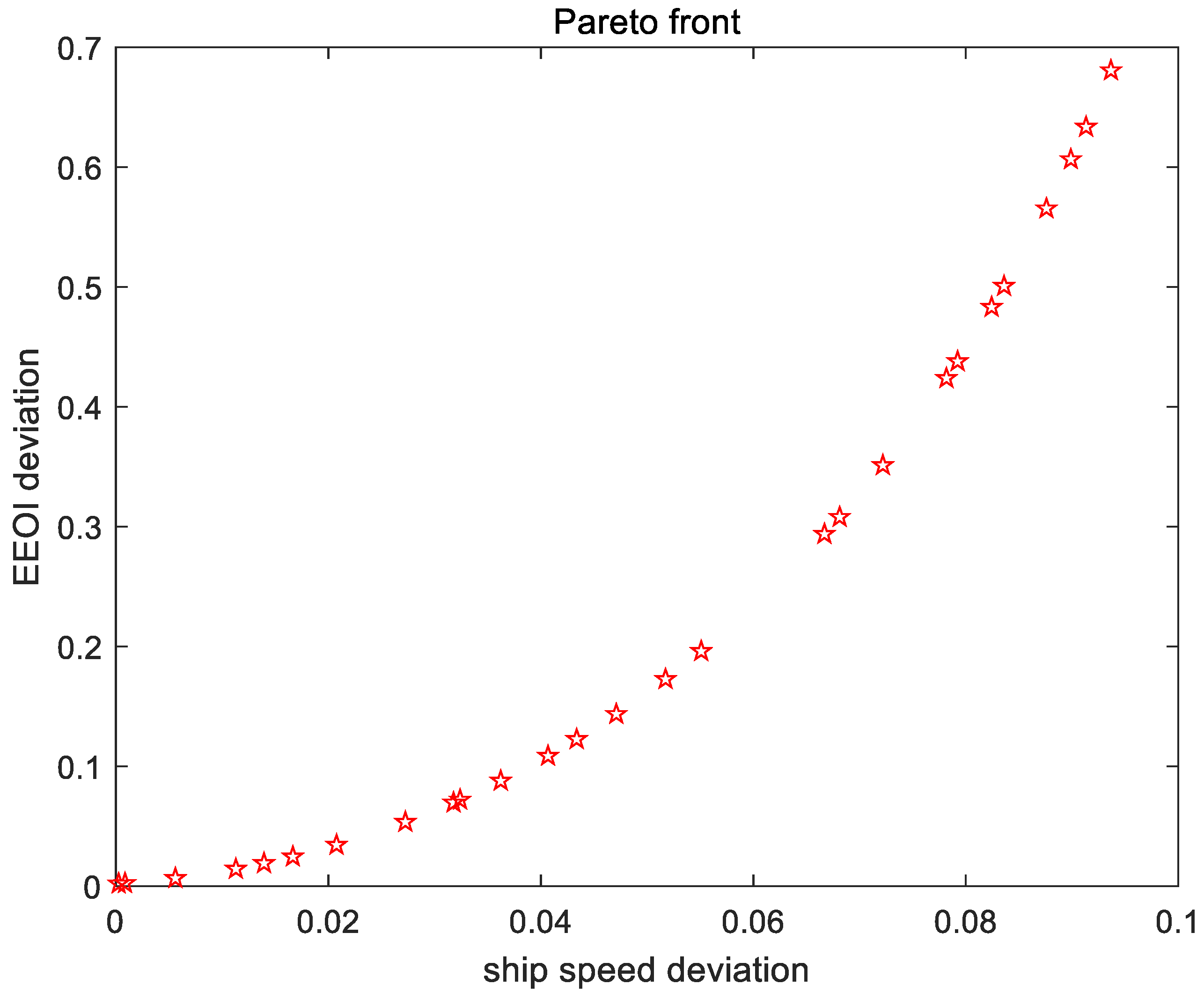
4.3. Energy Efficiency Optimization Based on NSGA-II Algorithm
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Terms and Abbreviations
| IMO | International Maritime Organization |
| EEDI | energy efficiency design index |
| SEEMP | ship energy efficiency management plan |
| EEOI | energy efficiency operational indicator |
| ANN | artificial neural network |
| GA | Genetic Algorithm |
| NSGA-II | non-dominated sorting genetic algorithm II |
| working conditions | environmental factors that affect the energy efficiency of ships, such as: wind speed, water flow speed. |
| MSE | mean squared error |
| RMSE | root mean square error |
References
- Faber, J.; Hanayama, S.; Zhang, S.; Pereda, P.; Comer, B.; Hauerhof, E.; van der Loeff, W.S.; Smith, T.; Zhang, Y.; Kosaka, H.; et al. Fourth IMO GHG Study 2020: Executive Summary. Available online: https://www.imo.org/en/OurWork/Environment/Pages/Fourth-IMO-Greenhouse-Gas-Study-2020.aspx (accessed on 21 October 2022).
- Bassam, A.M.; Phillips, A.B.; Turnock, S.R.; Wilson, P.A. Ship speed prediction based on machine learning for efficient shipping operation. Ocean. Eng. 2022, 245, 110449. [Google Scholar] [CrossRef]
- Geertsma, R.D.; Negenborn, R.R.; Visser, K.; Hopman, J.J. Design and control of hybrid power and propulsion systems for smart ships: A review of developments. Appl. Energy 2017, 194, 30–54. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, J.; Yan, X.; Shen, B.; Long, T. A review of multi-energy hybrid power system for ships. Renew. Sustain. Energy Rev. 2020, 132, 110081. [Google Scholar] [CrossRef]
- Capezza, C.; Coleman, S.; Lepore, A.; Palumbo, B.; Vitiello, L. Ship fuel consumption monitoring and fault detection via partial least squares and control charts of navigation data. Transp. Res. Part D Transp. Environ. 2019, 67, 375–387. [Google Scholar] [CrossRef]
- Corbett, J.J.; Wang, H.; Winebrake, J.J. The effectiveness and costs of speed reductions on emissions from international shipping. Transp. Res. Part D Transp. Environ. 2009, 14, 593–598. [Google Scholar] [CrossRef]
- Lindstad, H.; Asbjørnslett, B.E.; Strømman, A.H. Reductions in greenhouse gas emissions and cost by shipping at lower speeds. Energy Policy 2011, 39, 3456–3464. [Google Scholar] [CrossRef]
- Psaraftis, H.N.; Kontovas, C.A. Speed models for energy-efficient mariti-me transportation: A taxonomy and survey. Transp. Res. 2013, 26C, 331–351. [Google Scholar]
- Wen, M.; Pacino, D.; Kontovas, C.A.; Psaraftis, H.N. A multiple ship routing and speed optimization problem under time, cost and environmental objectives. Transp. Res. Part D Transp. Environ. 2017, 52, 303–321. [Google Scholar] [CrossRef]
- Li, X.; Sun, B.; Zhao, Q.; Li, Y.; Shen, Z.; Du, W.; Xu, N. Model of speed optimization of oil tanker with irregular winds and waves for given route. Ocean. Eng. 2018, 164, 628–639. [Google Scholar] [CrossRef]
- Lin, H.; Chen, S.; Luo, L.; Wang, Z.; Zeng, Y. Research on the Speed Optimization Model Based on BP Neural Network and Genetic Algorithm (GA). In Proceedings of the 29th International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 16–21 June 2019. [Google Scholar]
- Tarelko, W.; Rudzki, K. Applying artificial neural networks for modelling ship speed and fuel consumption. Neural Comput. Appl. 2020, 32, 17379–17395. [Google Scholar] [CrossRef]
- He, Y.; Fan, A.; Wang, Z.; Liu, Y.; Mao, W. Two-phase energy efficiency optimisation for ships using parallel hybrid electric propulsion system. Ocean. Eng. 2021, 238, 109733. [Google Scholar] [CrossRef]
- Sui, C.; Stapersma, D.; Visser, K.; de Vos, P.; Ding, Y. Energy effectiveness of ocean-going cargo ship under various operating conditions. Ocean. Eng. 2019, 190, 106473. [Google Scholar] [CrossRef]
- Wang, K.; Yan, X.; Yuan, Y.; Li, F. Real-time optimization of ship energy efficiency based on the prediction technology of working condition. Transp. Res. Part D Transp. Environ. 2016, 46, 81–93. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, W.; Li, Y.; Wang, J.; Dang, Z. Forecasting wind speed using empirical mode decomposition and Elman neural network. Appl. Soft Comput. 2014, 23, 452–459. [Google Scholar] [CrossRef]
- Li, X.; Zhang, L.; Wang, Z.; Dong, P. Remaining useful life prediction for lithium-ion batteries based on a hybrid model combining the long short-term memory and Elman neural networks. J. Energy Storage 2019, 21, 510–518. [Google Scholar] [CrossRef]
- Jia, W.; Zhao, D.; Zheng, Y.; Hou, S. A novel optimized GA–Elman neural network algorithm. Neural Comput. Appl. 2019, 31, 449–459. [Google Scholar] [CrossRef]
- Wang, Z.; Fan, A.; Tu, X.; Vladimir, N. An energy efficiency practice for coastal bulk carrier: Speed decision and benefit analysis. Reg. Stud. Mar. Sci. 2021, 47, 101988. [Google Scholar] [CrossRef]
- Han, Z.; Zhao, J.; Leung, H.; Ma, K.F.; Wang, W. A review of deep learning models for time series prediction. IEEE Sens. J. 2019, 21, 7833–7848. [Google Scholar] [CrossRef]
- International Maritime Organization. Guidelines for Voluntary Use of the Ship Energy Efficiency Operational Indicator; MEPC 59/Circ. 684: London, UK, 2009. [Google Scholar]
- Holtrop, J.; Mennen, G.G.J. An approximate power prediction method. Int. Shipbuild. Prog. 1982, 29, 166–170. [Google Scholar] [CrossRef]
- Yu, B.; Peng, Z.; Tian, Z.; Yao, B. Sailing speed optimization for tramp ships with fuzzy time window. Flex. Serv. Manuf. J. 2019, 31, 308–330. [Google Scholar] [CrossRef]
- Niu, B.; Wang, D.; Pan, P. Multi-objective optimal design of permanent magnet eddy current retarder based on NSGA-II algorithm. Energy Rep. 2022, 8, 1448–1456. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Length | 32.1 m |
| Width | 7.3 m |
| Design draft | 1.1 m |
| Rated power for propulsion motor | 75 kW × 2 |
| Total capacity of battery | 387 kWh |
| Rated speed for propulsion motor | 700 rpm |
| Rated power of diesel generator set | 200 kW |
| Working Condition | MSE | RMSE |
|---|---|---|
| Wind speed | 0.7401 | 0.8603 |
| Current speed | 0.0157 | 0.1253 |
| λ1 | λ2 | EEOI (g/t·n) | Ship Speed (m/s) |
|---|---|---|---|
| 0 | 1 | 5.05 | 2.13 |
| 0.3 | 0.7 | 5.97 | 2.69 |
| 0.5 | 0.5 | 6.19 | 3.34 |
| 0.7 | 0.3 | 6.59 | 3.87 |
| 1 | 0 | 7.05 | 4.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Gao, D.; Yang, P.; Hu, Y. An Energy Efficiency Optimization Strategy of Hybrid Electric Ship Based on Working Condition Prediction. J. Mar. Sci. Eng. 2022, 10, 1746. https://doi.org/10.3390/jmse10111746
Liu B, Gao D, Yang P, Hu Y. An Energy Efficiency Optimization Strategy of Hybrid Electric Ship Based on Working Condition Prediction. Journal of Marine Science and Engineering. 2022; 10(11):1746. https://doi.org/10.3390/jmse10111746
Chicago/Turabian StyleLiu, Beibei, Diju Gao, Ping Yang, and Yihuai Hu. 2022. "An Energy Efficiency Optimization Strategy of Hybrid Electric Ship Based on Working Condition Prediction" Journal of Marine Science and Engineering 10, no. 11: 1746. https://doi.org/10.3390/jmse10111746