1. Introduction
Multi-ship encounter collision avoidance path planning is a hot research topic in the field of ship motion control. Many methods have been used to solve this problem. As early as the 1980s and 1990s, a knowledge-based system was used for multi-ship encounter collision avoidance path planning [
1,
2]. The problems of decision-making blind spots and low decision-making efficiency are affected by the collision avoidance knowledge base and reasoning mechanism.
Analytical geometry methods are also used for collision avoidance path optimization. In [
3], a cooperative path planning algorithm was proposed, and the concept of ship priority was used in the algorithm. However, only three typical encounter situations (the overtaking, head-on, and crossing situations) were considered, and Rule 18 and 19 of the COLREGs were not considered. For the multi-ship encounter situation, the uncertainty of the target ship’s action makes this cooperative collision avoidance difficult to achieve in the practice of ship collision avoidance. In [
4], a deterministic collision avoidance path optimization algorithm TBA (Trajectory Base Algorithm) was proposed, which effectively shortened the calculation time but did not consider the action changes of the target ship. The CCDWA (COLREG-compliant dynamic window approach) was used to solve the collision avoidance problem in ref. [
5]. However, this method only considers three typical encounter situations between the two ships and does not consider the changes in the action of the target ship.
Control theory methods are also used for collision avoidance path optimization [
6,
7,
8]. In [
9], a concept of a ship collision avoidance system based on model predictive control was proposed. This algorithm considers the action changes of the target ship and the constraints of the COLREGs. With an increase in the number of target ships, the computational complexity of the algorithm increases, which affects the decision-making time. A combined nonlinear model predictive control (NMPC) method was used for trajectory tracking and collision avoidance [
10]. However, this approach only considers three typical encounter situations and does not take into account the collision-avoidance action requirements of the COLREGs.
Fuzzy logic methods are used for collision avoidance path optimization. Aiming at the problem of collision avoidance in complex multi-ship encounter situations, ref. [
11] proposed a Fuzzy–Bayesian ship intelligent collision avoidance decision-making model to achieve continuous collision avoidance actions. In addition, this method was upgraded in ref. [
12], but the action changes of the target ship were not considered. In [
13,
14,
15], Fuzzy theory was employed to infer the collision risk index for collision avoidance, but Rules 18 and 19 of the COLREGs were not considered.
Artificial Potential Field (APF) has been used for collision avoidance path optimization in some studies [
16,
17,
18]; the principle is to guide the target to avoid obstacles through the action rules of Virtual Field Force (VFF). Ref. [
19] proposed a multi-vessel cooperative path planning method based on APF, which makes collision avoidance decisions according to the priority of target vessels. Additionally, the uncertainty of the action of the target ship makes it difficult to realize the coordinated path planning scheme. Ref. [
20] proposed a COLREGs-constrained real-time path-planning method for autonomous ships using modified artificial potential fields; this method has high decision-making efficiency, but it only considers three typical encounter situations.
Evolutionary algorithms are also used for multi-ship encounter collision avoidance path optimization. In [
21], the decision to avoid the four target ships took about 900 s. A multi-vessel path planning method based on an evolutionary algorithm was proposed [
22,
23] called ESoSST (Evolutionary Sets of Safe Ship Trajectories). Subsequently, the method was used in TSS (Traffic Separation Scheme) waters [
24], as well as in waters with restricted visibility [
25]. ESoSST is a cooperative path planning method, and the computational time is about 10–30 s.
The swarm intelligence optimization algorithm has been used for collision avoidance path optimization. A method of ship collision avoidance path planning based on the ant colony optimization (ACO) algorithm has been proposed [
26,
27], which assumes that target ships maintain their course and speed. The simulation results show that the decision-making time to avoid four target ships and eight target ships can reach up to 29 s and 57 s, respectively. In [
28], particle swarm optimization (PSO) was used for the path planning problem of unmanned surface vehicles with currents effects, but the targets were static.
The differential game theory method is also used for collision avoidance path optimization [
29,
30]. The method takes into account the action changes of the target ship. However, the drawback is that the high computational complexity in multi-ship encounters reduces the decision-making efficiency.
Distributed decision-making methods are used for collision avoidance path optimization [
31,
32]. These methods rely on information exchange and negotiation between ship agents to make collision avoidance decisions, but they are not applicable to non-agent ships.
The velocity obstacle (VO) method, based on the relative motion principle in physics, is also used for ship collision avoidance path optimization. In [
33], VO was used for avoiding dynamic targets, but only three typical encounter situations were considered. Ref. [
34] used VO to avoid target ships with predictable trajectories, but the constraints of the COLREGs were not considered.
With the rapid development of artificial intelligence technology, there has been related research on the application of machine learning in the field of ship collision avoidance [
35,
36]. In [
37], a concise deep reinforcement learning obstacle avoidance method was presented, but the target ships were static. Ref. [
38] proposed an automatic collision avoidance of multiple ships method based on deep Q-learning, but only three typical encounter situations were considered. In [
39], deep reinforcement learning was used for AUV (autonomous underwater vehicle) obstacle avoidance planning, but the constraints of the COLREGs were not considered. Moreover, when machine learning deals with complex problems, it is often inefficient because of the high amount of computation.
In view of the above literature review, this paper presents a DCA-based collision avoidance path planning method for marine vehicles in presence of a multi-ship encounter situation. The proposed method fully takes into account the constraints of the COLREGs and the changes in the action of the target. The purpose of the method is to give an optimal collision avoidance path quickly and dynamically. The rest of the paper is organized as follows. In
Section 2, a simplification of an encounter situation based on DCA is presented. The multi-ship encounter intelligent collision avoidance decision-making method is given in
Section 3. Simulation results are shown in
Section 4, and conclusions are given in
Section 5.
2. Simplification of Encounter Situation Based on DCA
In practice at sea, in fishing areas, in TSS waters, or in habitual waterways, for a group of ships with a similar course, speed and position are often encountered (e.g., a fleet of fishing vessels). In the process of collision avoidance, the officer on watch (OOW) usually considers such a group of ships as one target. On the basis of this collision avoidance logic, it is possible to simplify the multi-ship encounter situation. In this paper, a dynamic cluster analysis (DCA) method is used to classify the target ships with similar attributes as group ships.
2.1. Cluster Analysis Method
In this paper, the Hierarchical Clustering Method (HCM) is used. The method divides the samples into classes, and then, the two classes with the closest attributes are merged into a new class by calculating the distance . After multiple clustering, all samples are merged into one class, and then a dendrogram is drawn. Finally, the number of classes and the sample composition of classes are determined.
2.1.1. Calculation of Distance between Samples
Suppose there are samples ( = 1, 2, …, ), and each sample has attributes; ( = 1, 2, …, ) represents the -th attribute value of the -th sample.
is the Euclidean distance between
and
.
and
represent the sample mean and standard deviation of the
-th attribute value, respectively. The calculation formula is as follows.
represents the normalized data of each attribute value.
The standardized Euclidean distance
can be obtained by calculation Formula (5).
2.1.2. Calculation of the Distance between Classes
In this paper, the Group Average Method was used to calculate the distance between classes. There are two classes, and , containing and samples, respectively.
The distance
DG between two classes is calculated as follows.
2.2. Group Ship Model
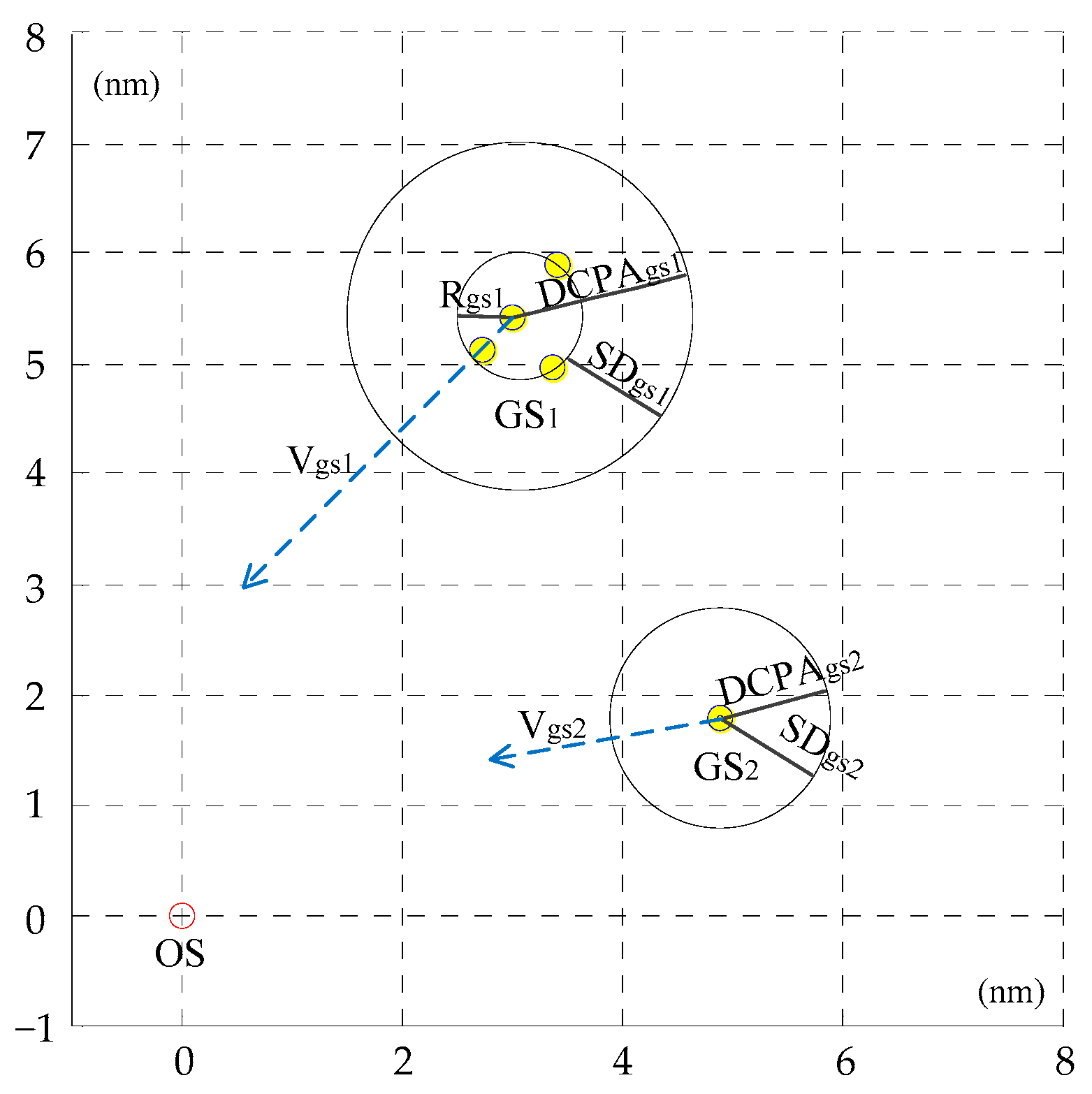
Suppose the target ship’s course is Cts, the speed is Vts, the distance to own ship (OS) is Dts, and the true bearing is TBts. Take each target ship (TS) as the sample of cluster analysis, choose Cts, Vts, Dts, and TBts as characteristic indices, and multiple target ships with a close course, speed, and position are classified into one group ship (GS).
The constraints of the cluster analysis are as follows. If the course difference of the target ships is more than Ec degrees, the speed difference of the target ships is more than Ev knots, or the distance between the target ships is greater than 2SD (safe distance), these three cases cannot be classified as one class. Ec, Ev, and SD are not fixed and can be determined according to specific encounter situations.
target ships (TS
1–TS
n) are classified into
(
) group ships (GS
1–GS
k) on the basis of the HCM. GS
p (
= 1, 2, …
) contains
(
,
+…+
=
) target ships. The domain of GS
p is a circle, the central position is (
,
), the radius is
, the course is
, the speed is
,
is the distance to the closest point of approach (DCPA) from the center of GS
p to OS, and the passing distance to OS is
. The calculation formula of each variable of GS
p is as follows.
where
is the
X coordinate value of each target ship in GS
p;
is the
Y coordinate value of each target ship in GS
p;
is the course of each target ship in GS
p;
is the speed of each target ship in GS
p.
Two samples of the group ship are shown in
Figure 1.
2.3. Dynamic Cluster Analysis
The cluster analysis method was introduced for the collision avoidance problem [
40], but it does not consider the action changes of the target ship. Actually, when the action of the target ship changes, it may be necessary to re-cluster the target ships to simplify the encounter situation. In order to realize the dynamic cluster analysis of the target ships, it is necessary to detect the action changes of the target ship, and the detection period is set as
Tc. When it is detected that the course difference between the target ships exceeds the threshold
or the speed difference exceeds the threshold
, the clustering analysis is performed again. A flow chart of the DCA of the target ships is shown in
Figure 2.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}