
CFD-FEM Analysis of Flow-Induced Vibrations in Waterjet Propulsion Unit



Abstract
:1. Introduction
2. Numerical Calculation Modeuel and Strategy
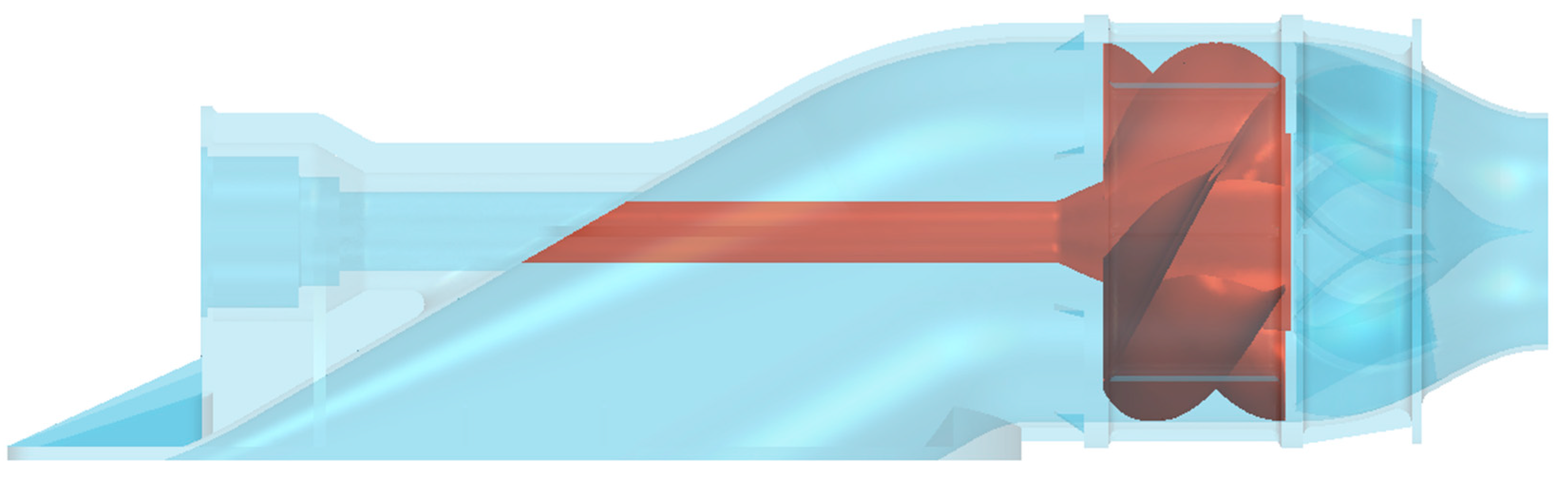
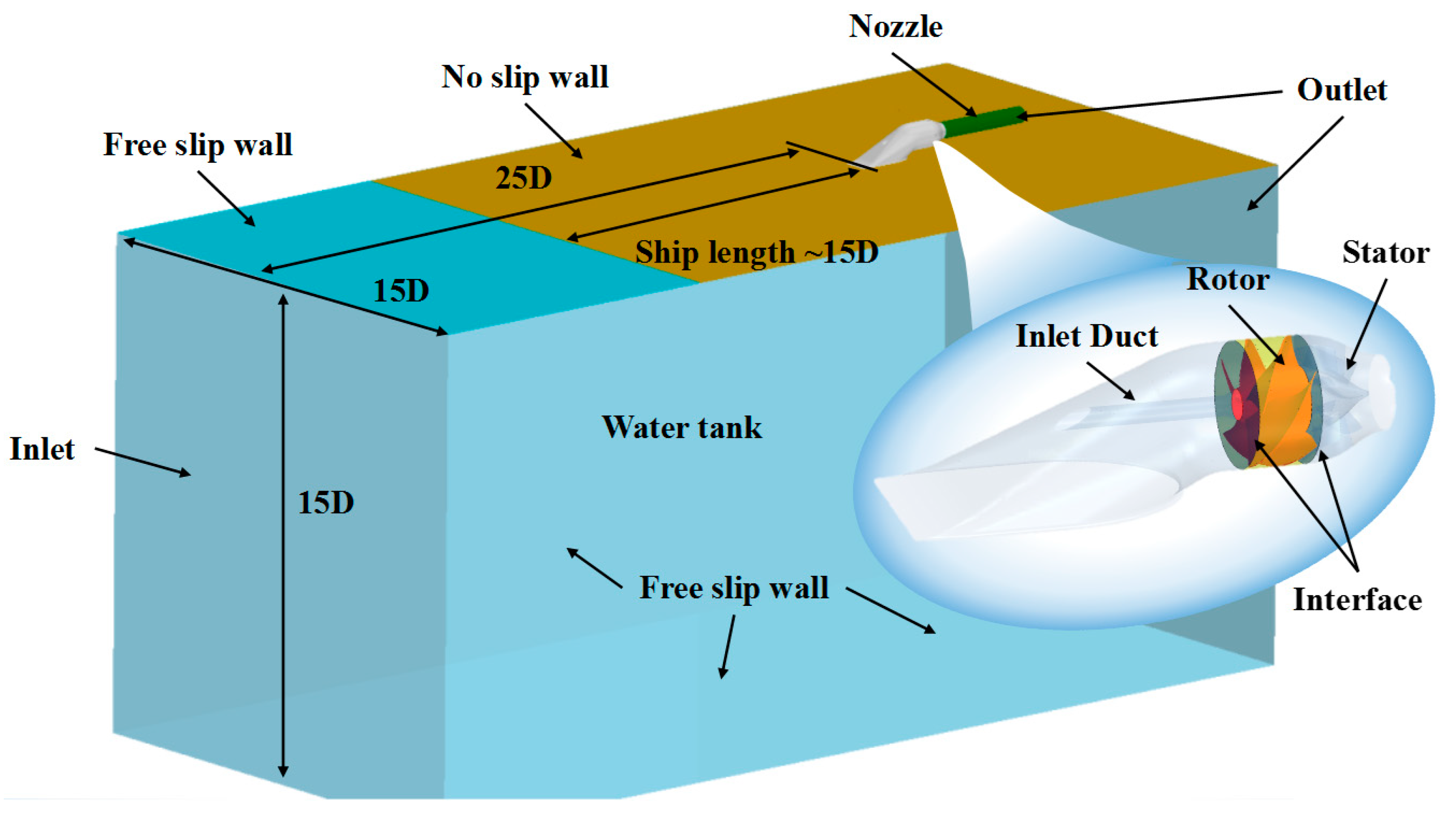
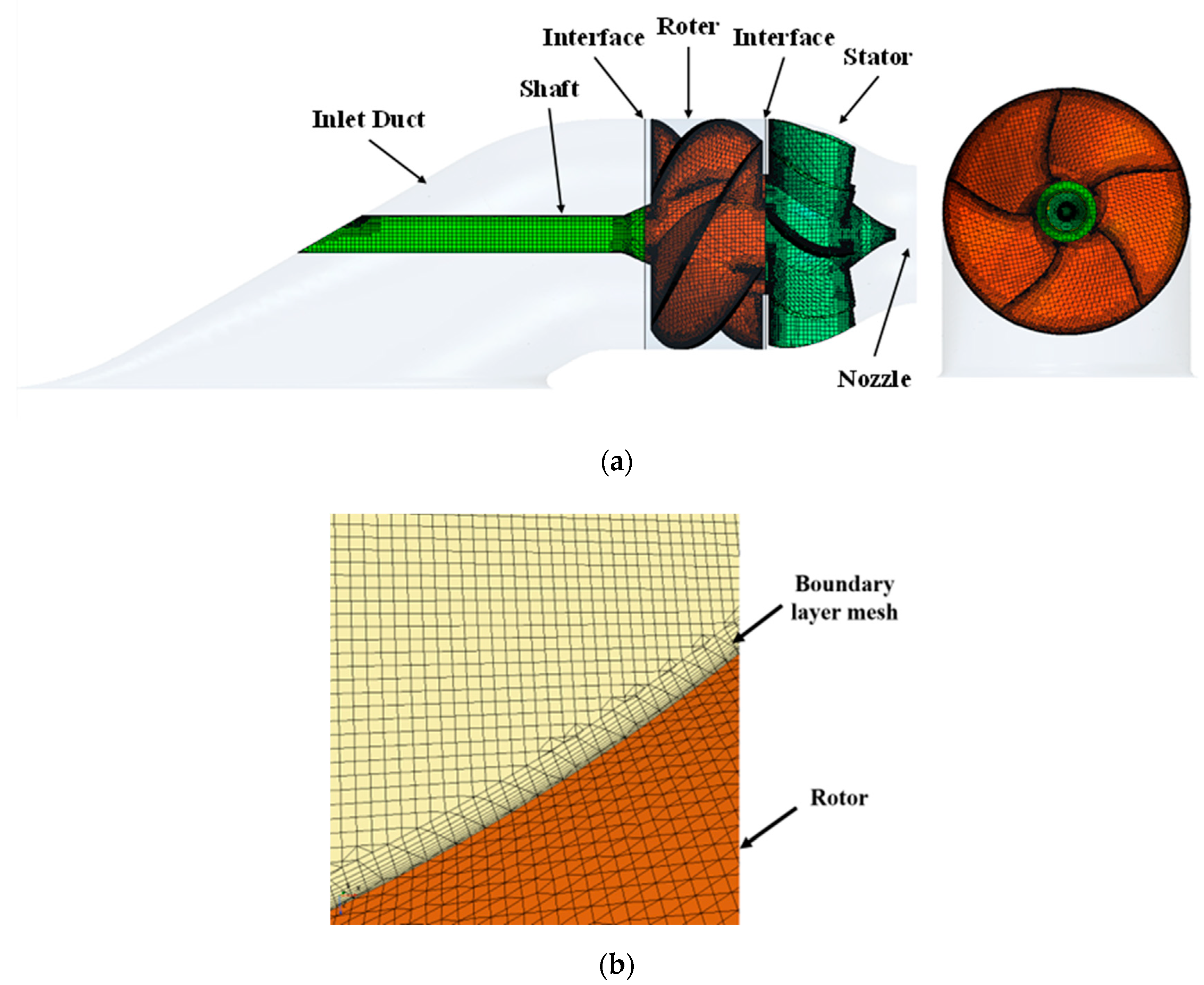
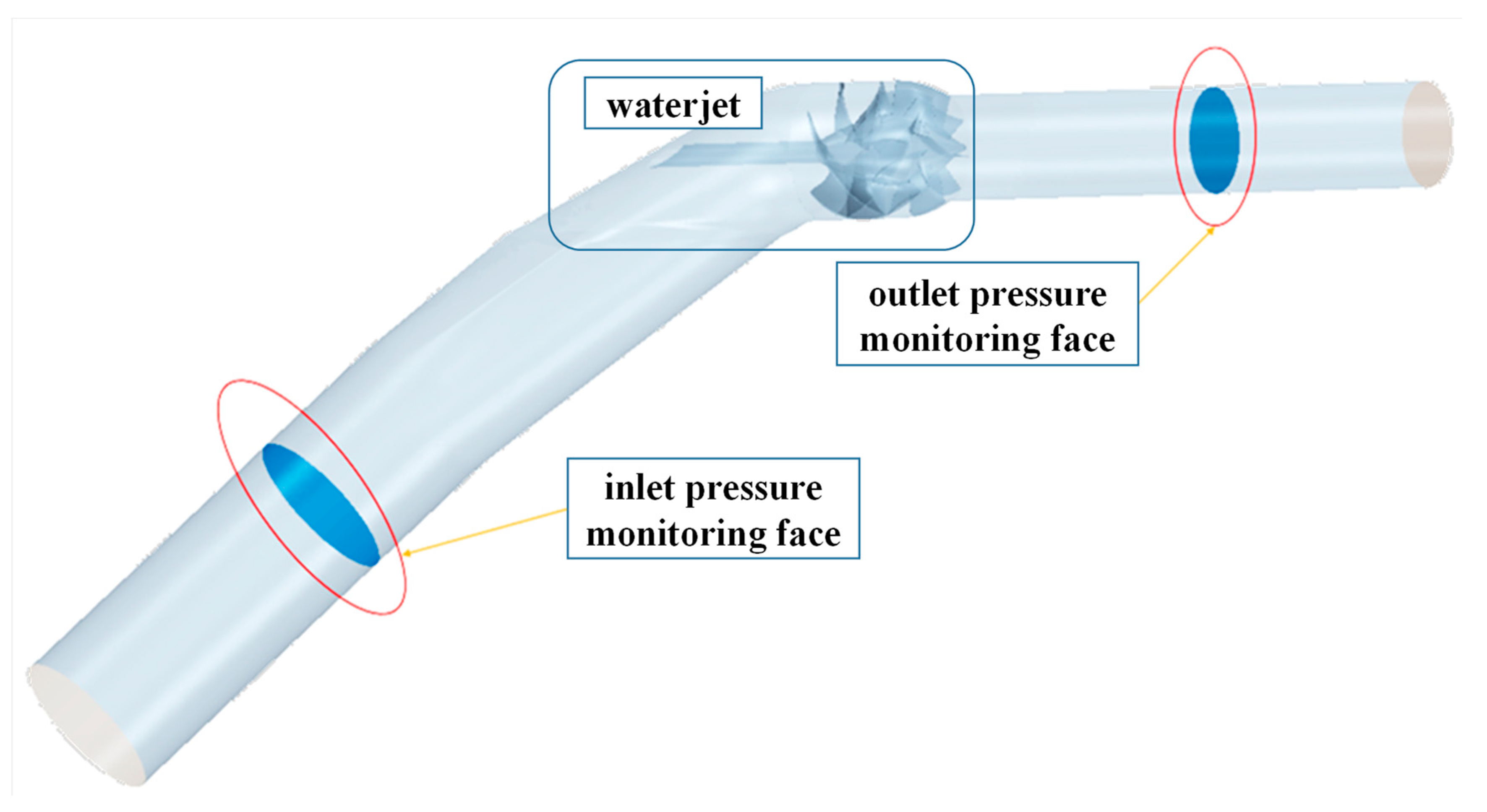
2.1. Three-Dimensional Model
2.2. Flow Field Numerical Methods
2.2.1. Numerical Methods
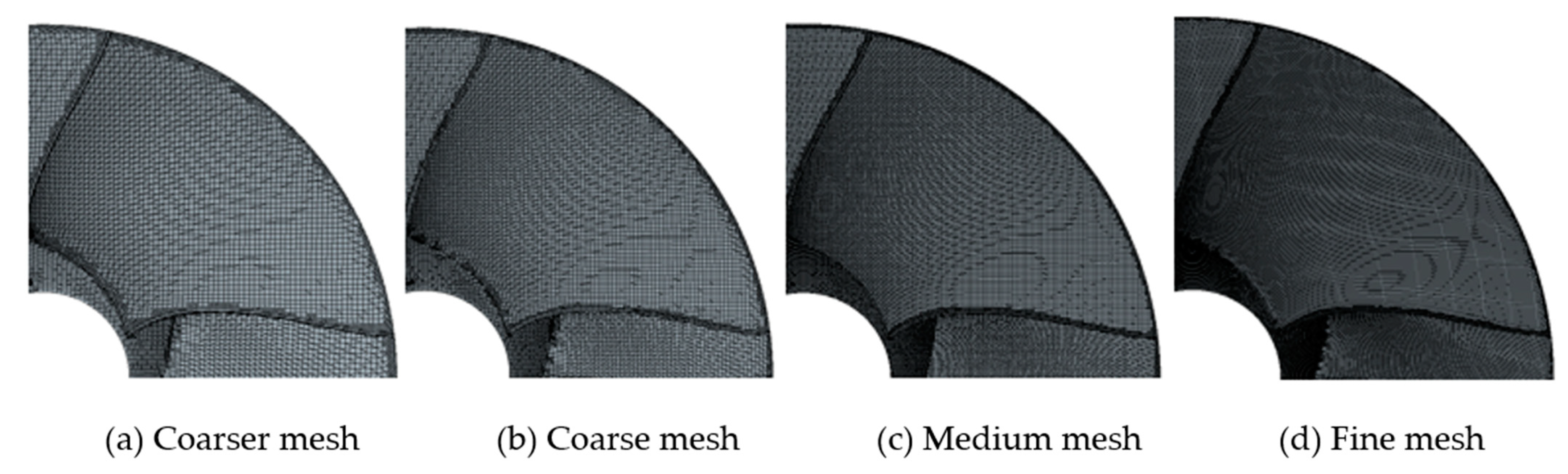
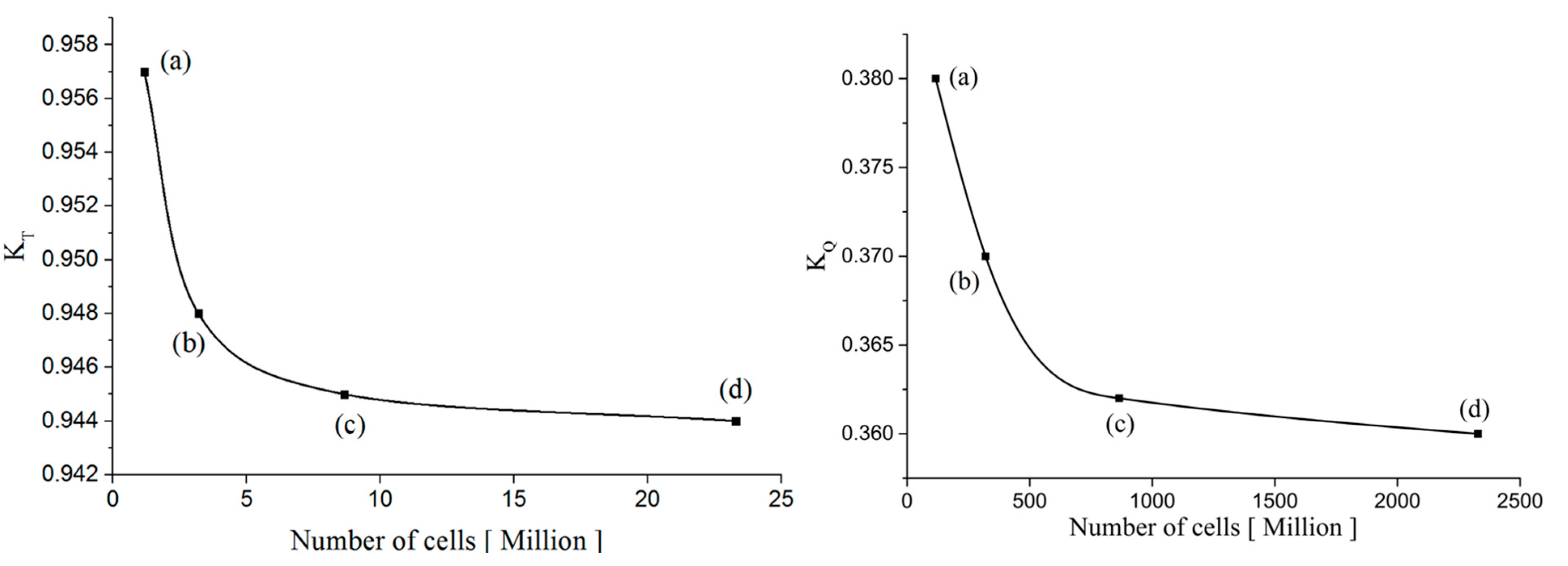
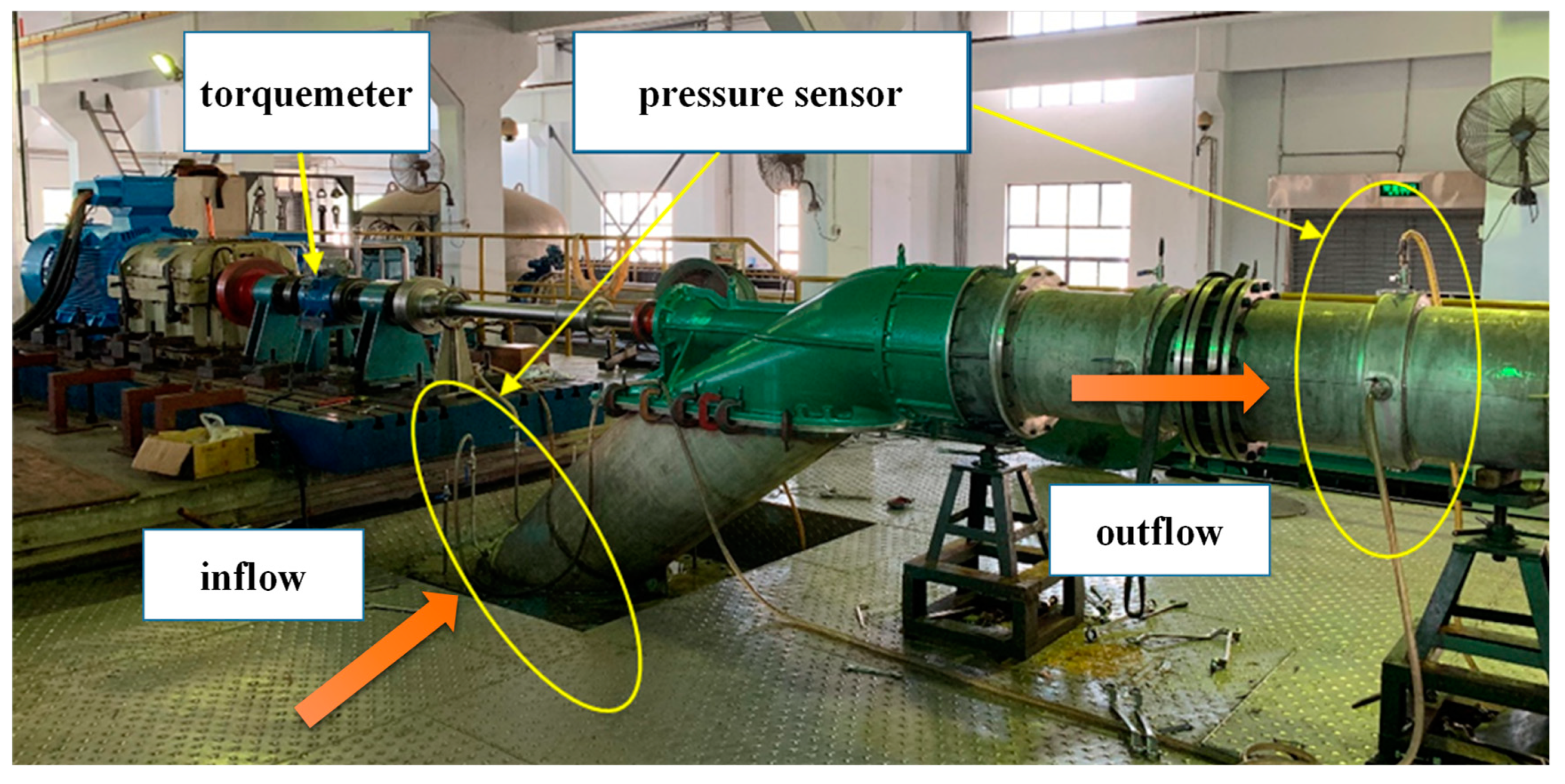
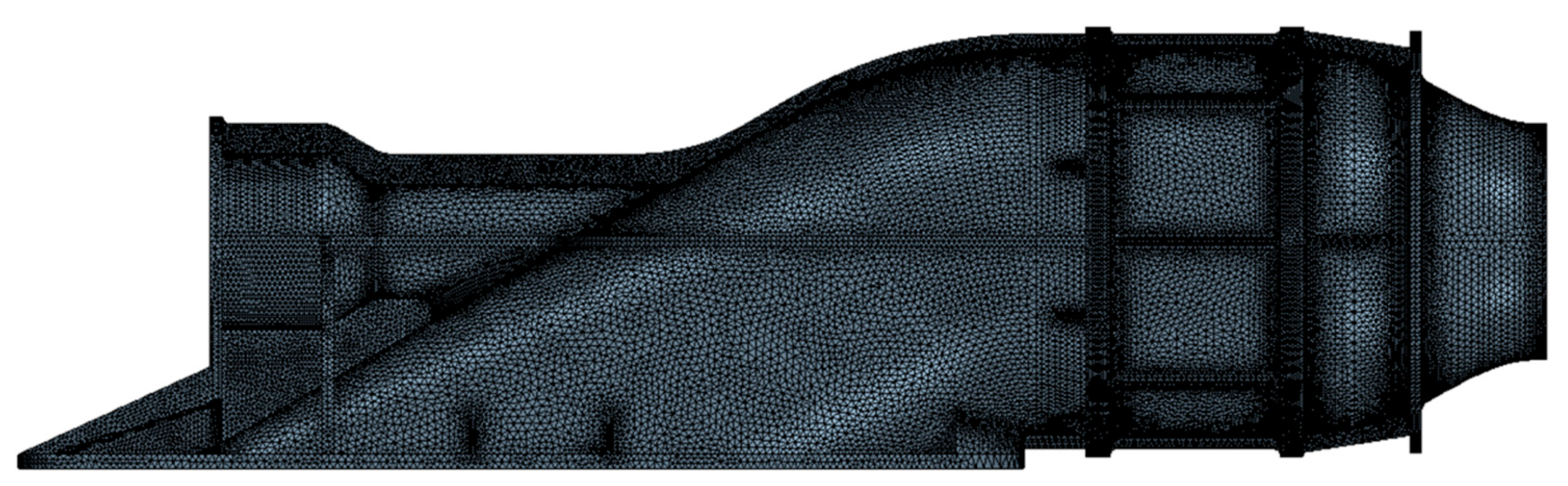
2.2.2. Grid Independence Study and Waterjet Bench Test
2.3. CFD-FEM Simulation Model
3. Analysis of Numerical Simulation Results
3.1. Pressure Fluctuation Characteristics
3.2. Unsteady Radial and Axial Force Analysis
3.3. Vibration Characteristics of the Waterjet
3.4. Vibration Tests
4. Influence of the Axial Gap
4.1. Influence on Performance
4.2. Influence on Vibration Characteristics
5. Conclusions
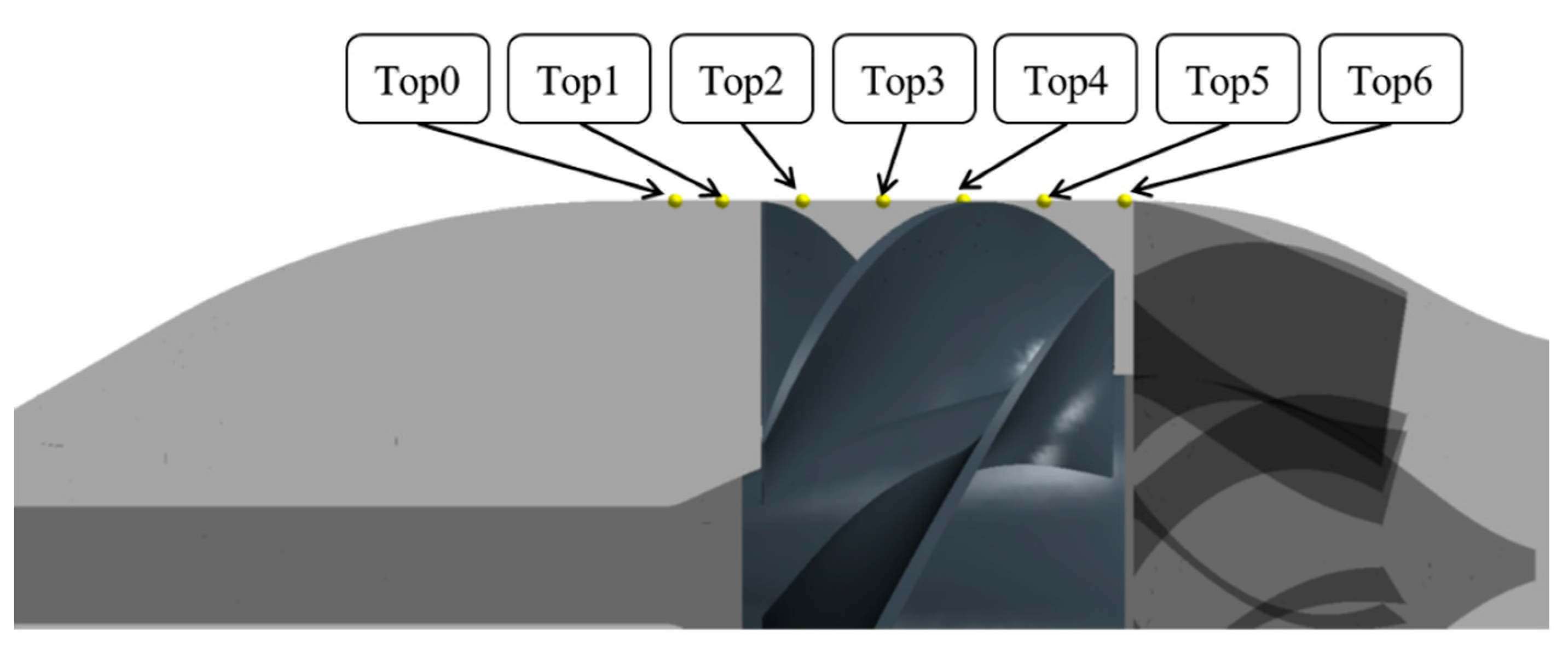
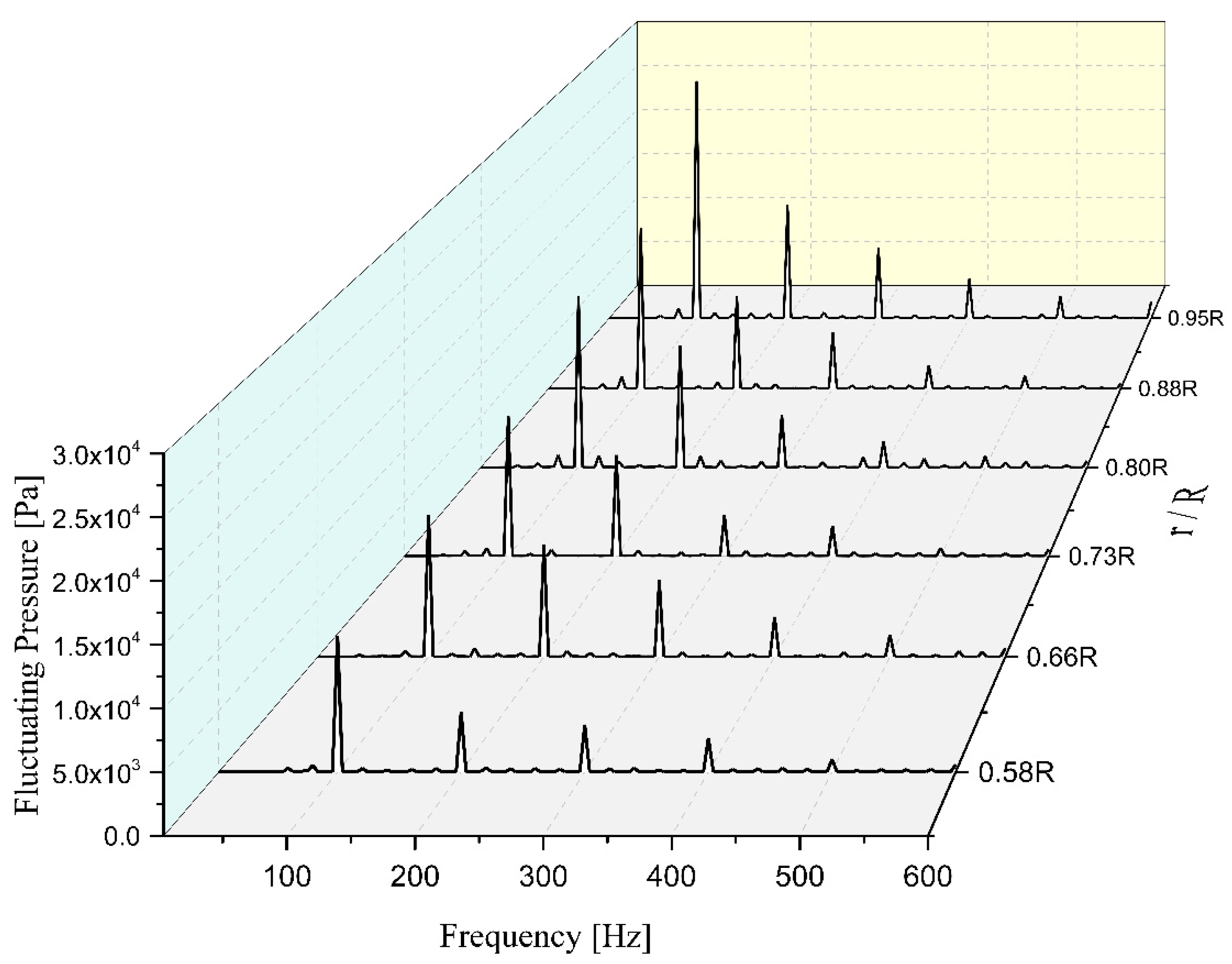
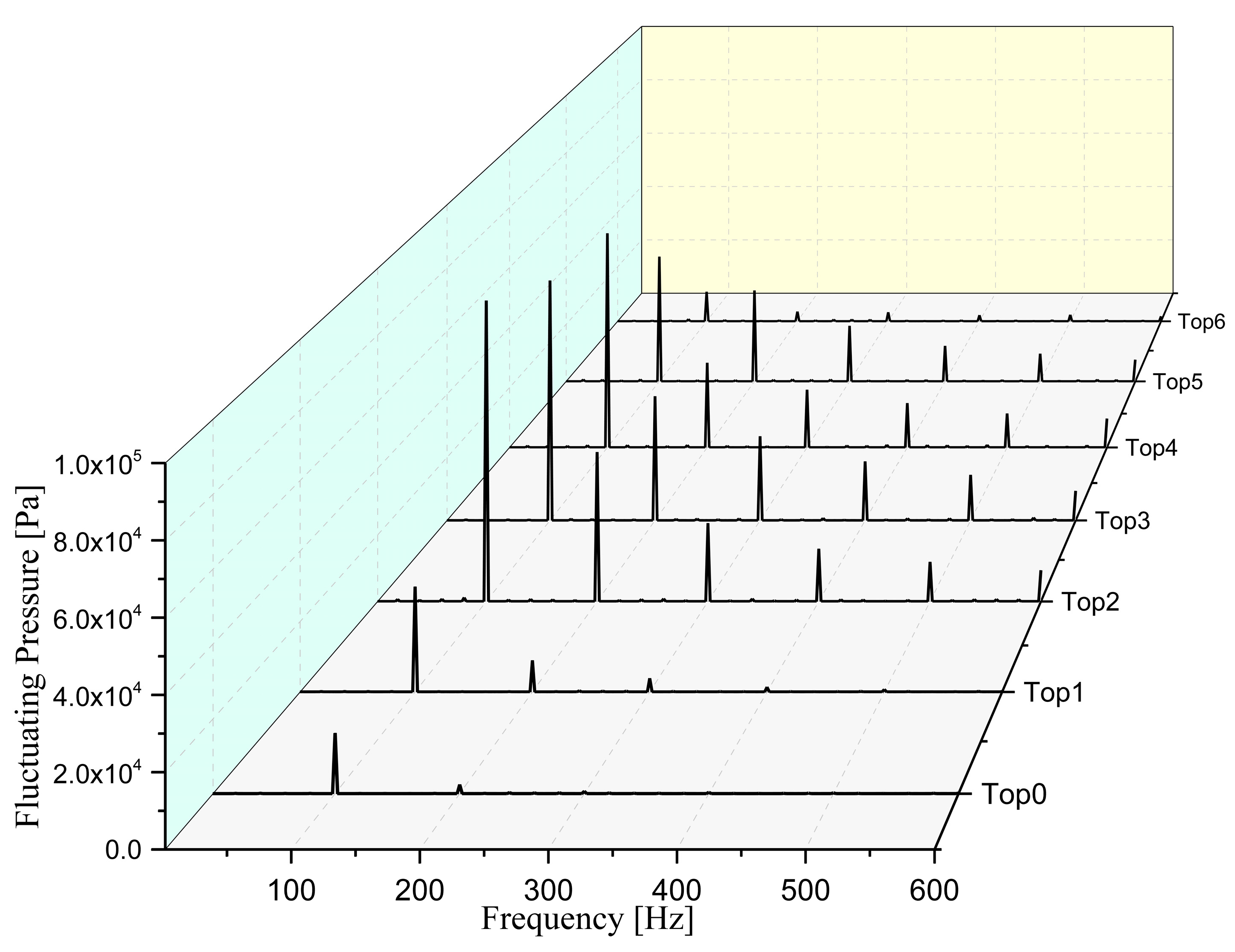
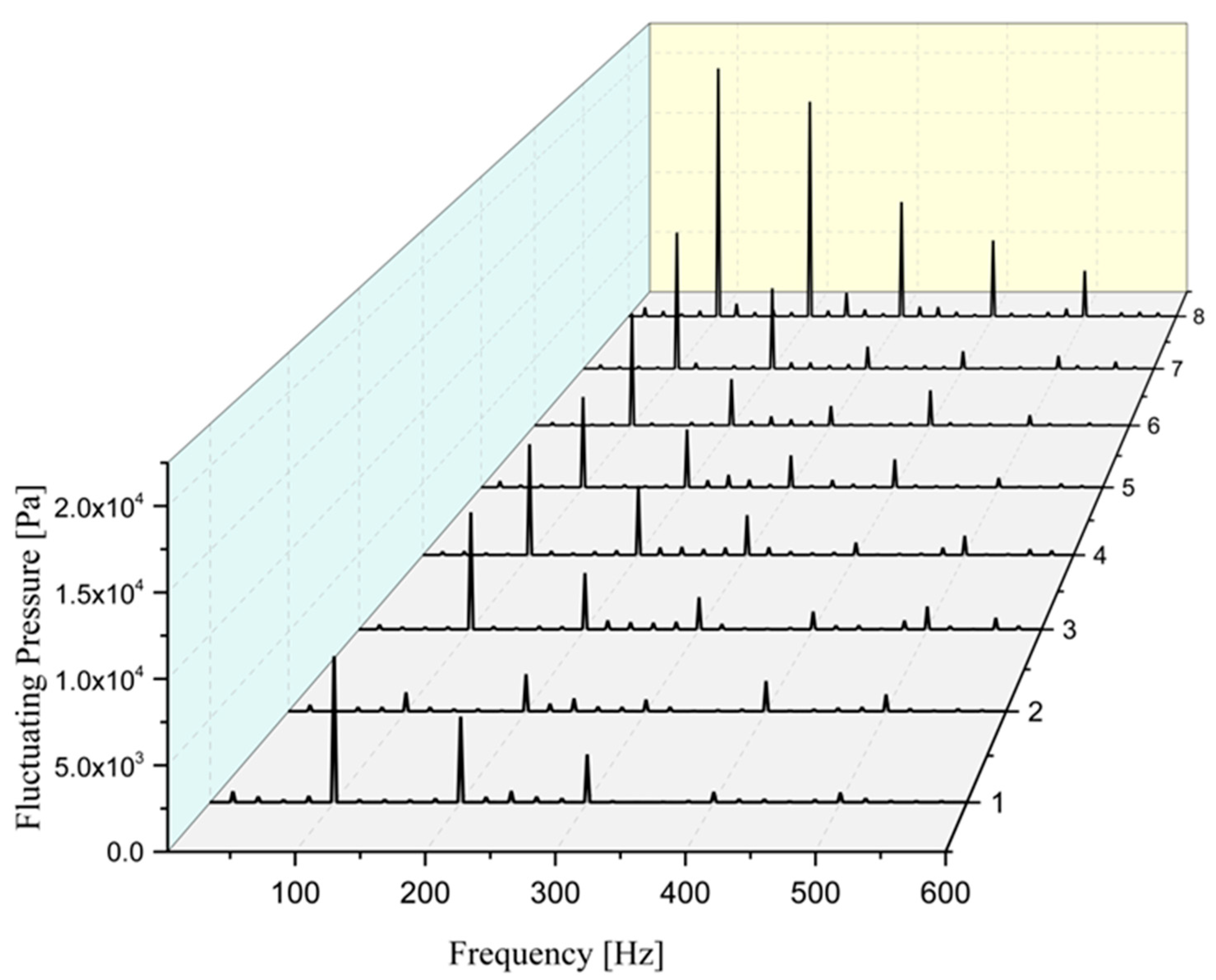
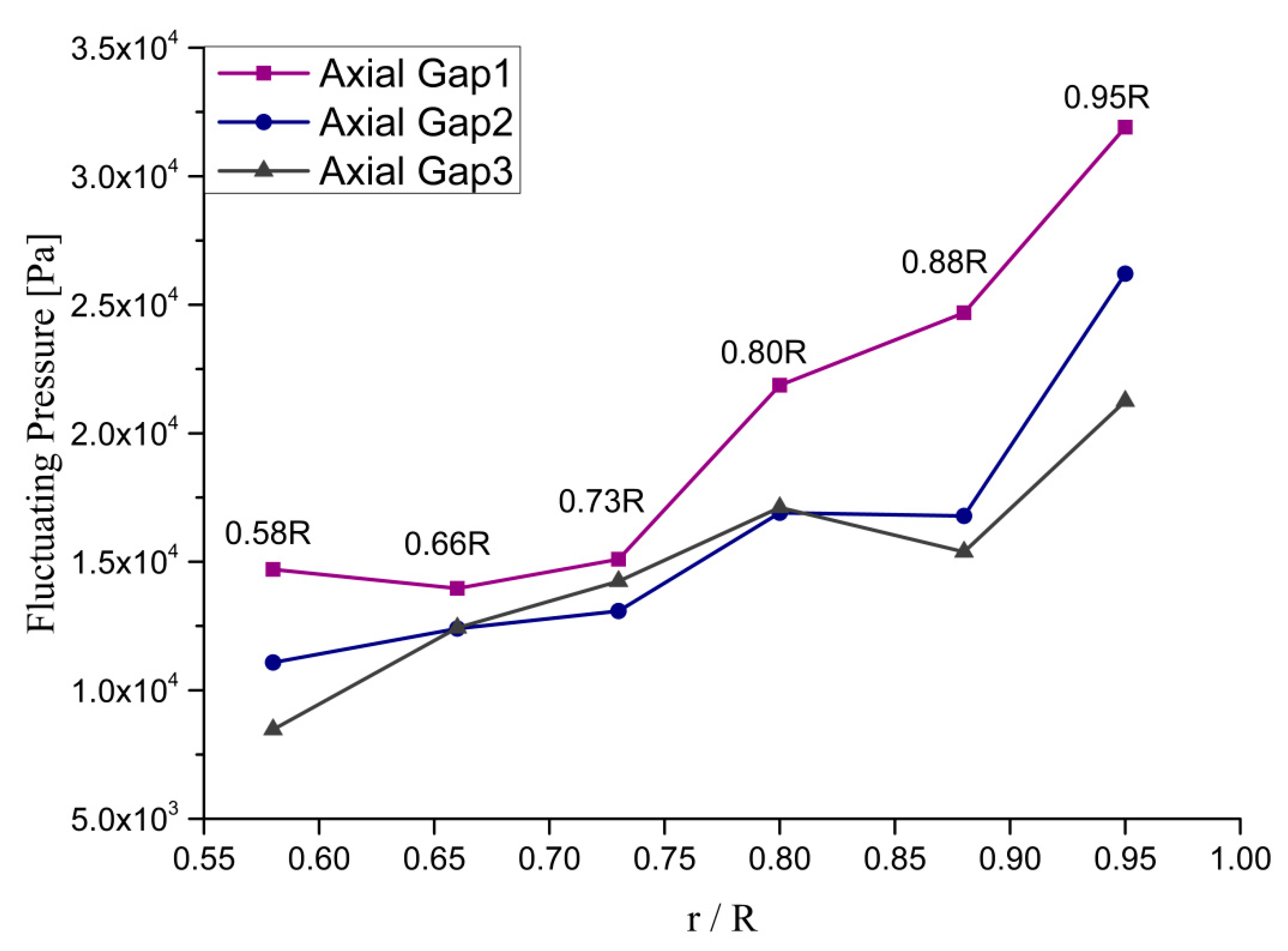
- The dominant frequency of the fluctuating pressure in the waterjet thruster is the first BPF of the impeller. Therefore, the natural frequency of the main structure should avoid integer multiples of the BPF to improve the operational stability of the waterjet. The hydrodynamic loads near the tip of the blade are high and the flow in the blade tip clearance region is complex. The amplitude of the fluctuating pressure in the blade tip clearance region is significantly higher than that at the rotor outlet and the stator inlet. The maximum fluctuating pressure value is located at the tip clearance region, close to the blade inlet edge.
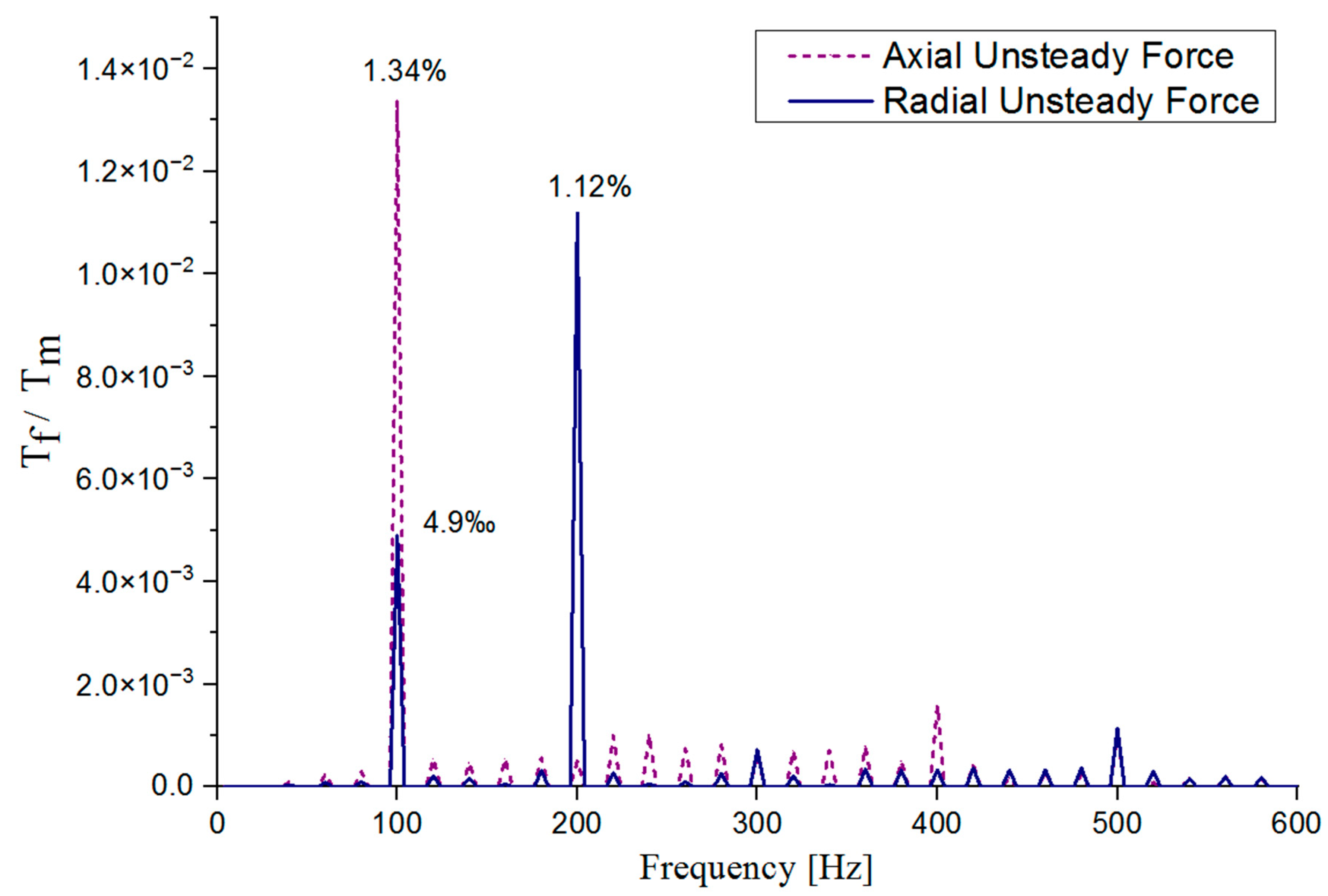
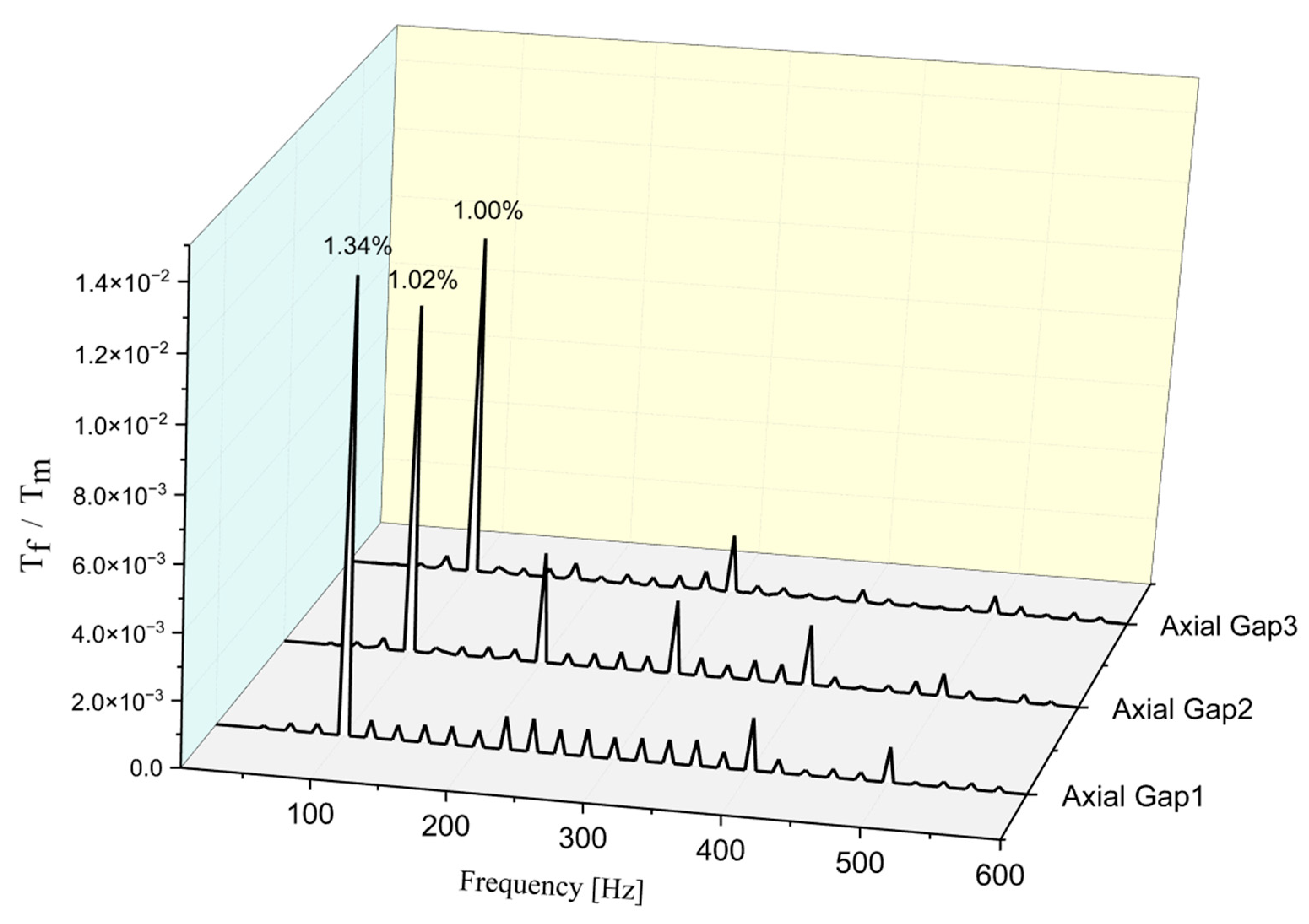
- The axial flow velocity at the inlet duct to the rotor decreases gradually from bottom to top. Unsteady radial and axial forces are generated during the pump’s rotation operation. The main frequency of the unsteady axial force of the impeller occurs at the 1× shaft frequency, and the amplitude is 1.34% of the blade thrust. The main frequency of the unsteady radial force of the impeller occurs at 2BPF, where the amplitude is 1.12% of the blade thrust.
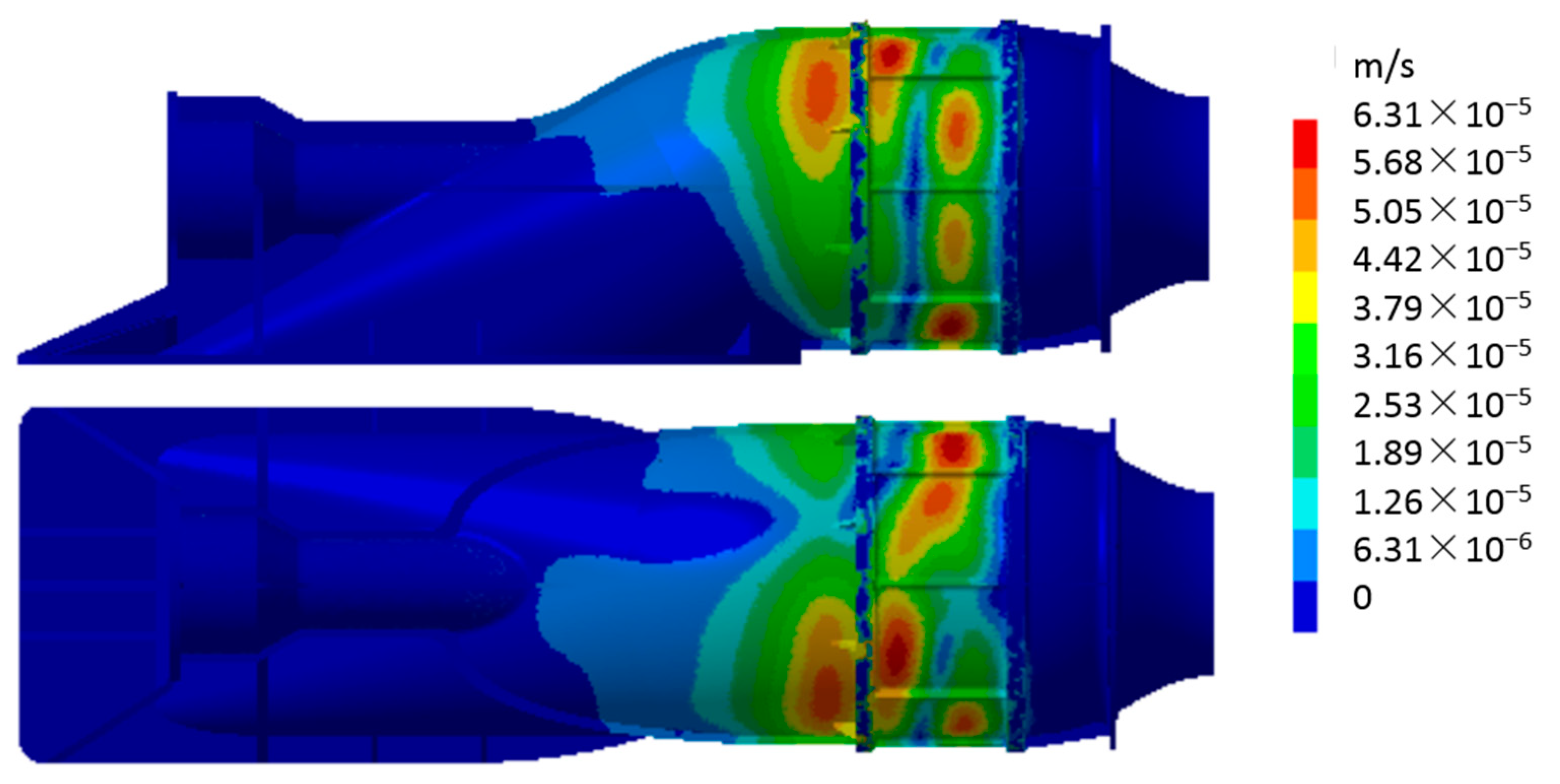
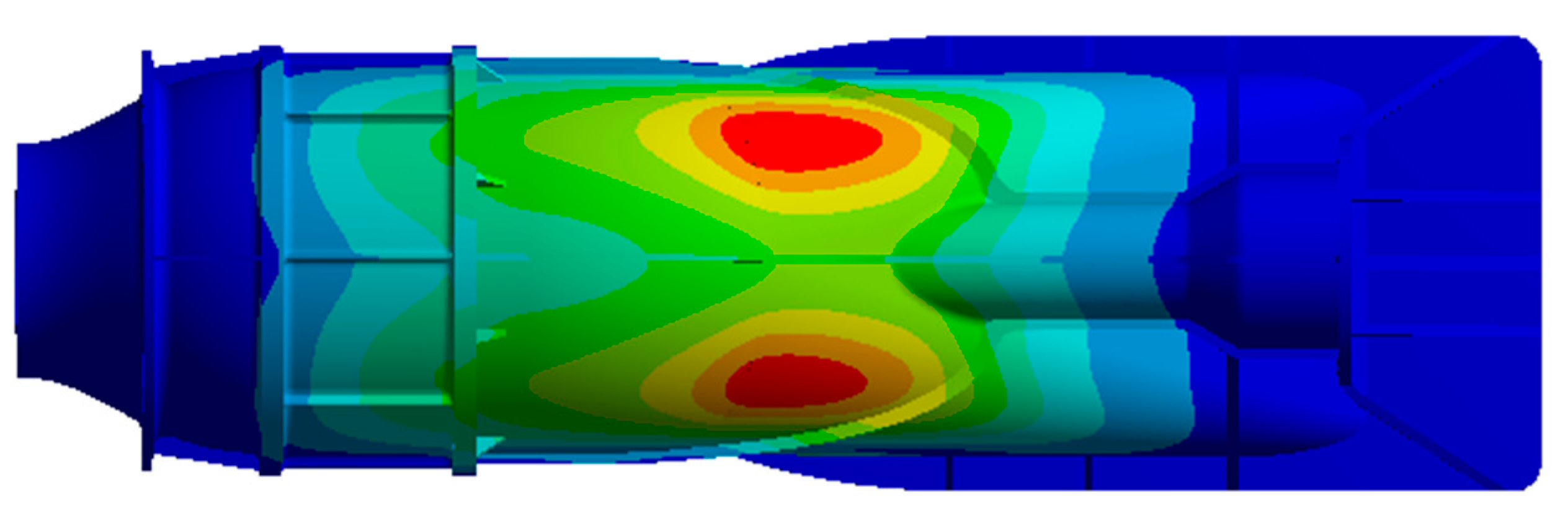
- At 1BPF, the maximum vibration velocity on the surface of the pump case occurs near the rotor section. This is consistent with the maximum fluctuating pressure here, and so this is the key position for vibration and noise control. For example, the flow-induced vibration of the structure can be weakened by increasing the wall thickness and adding stiffeners.
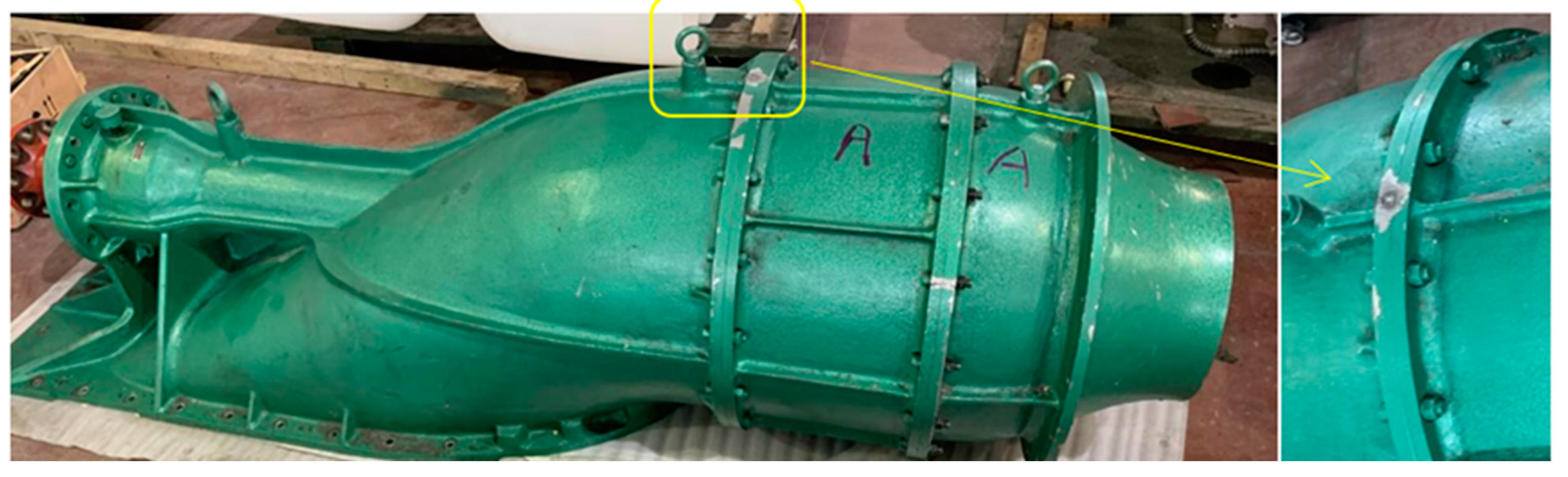
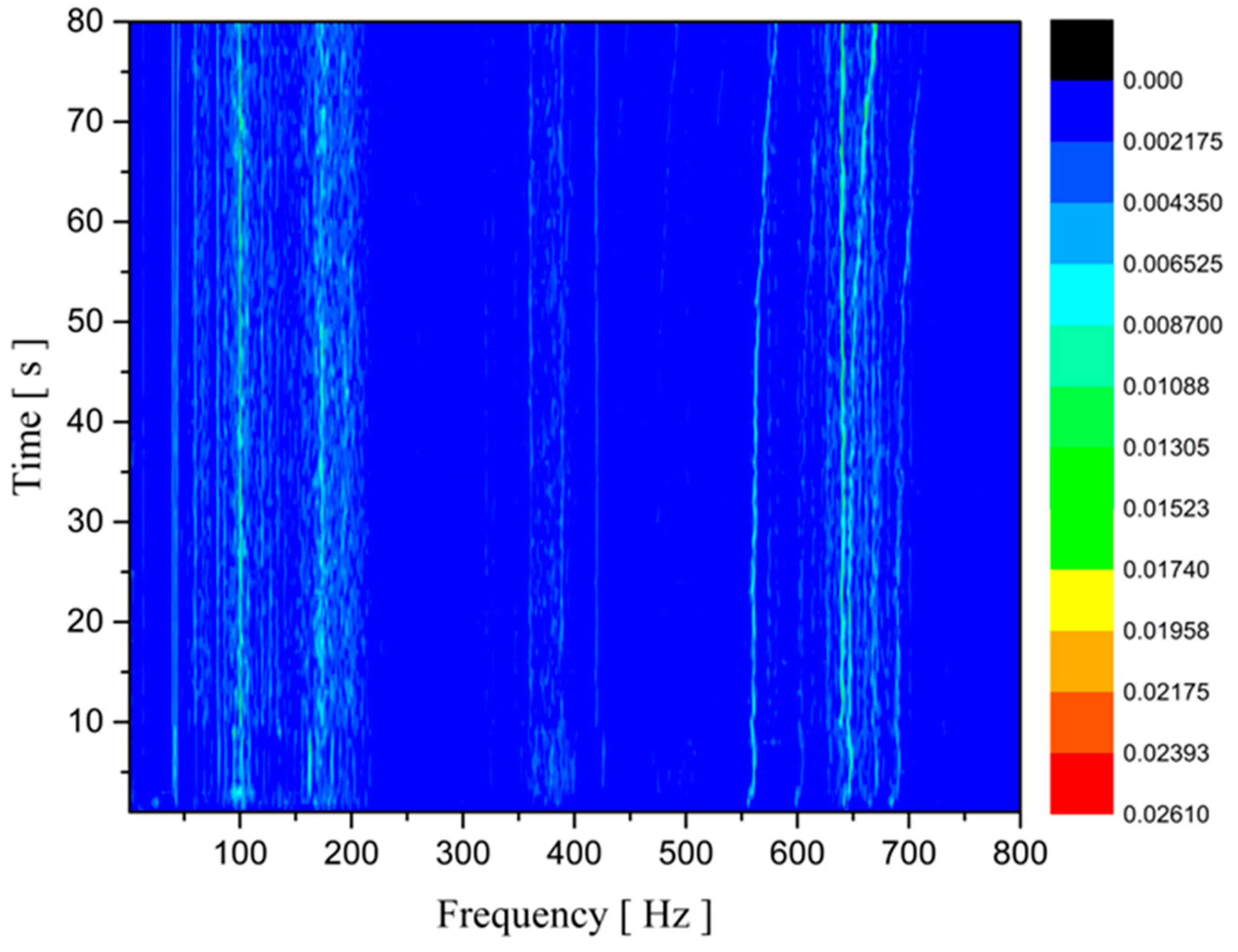
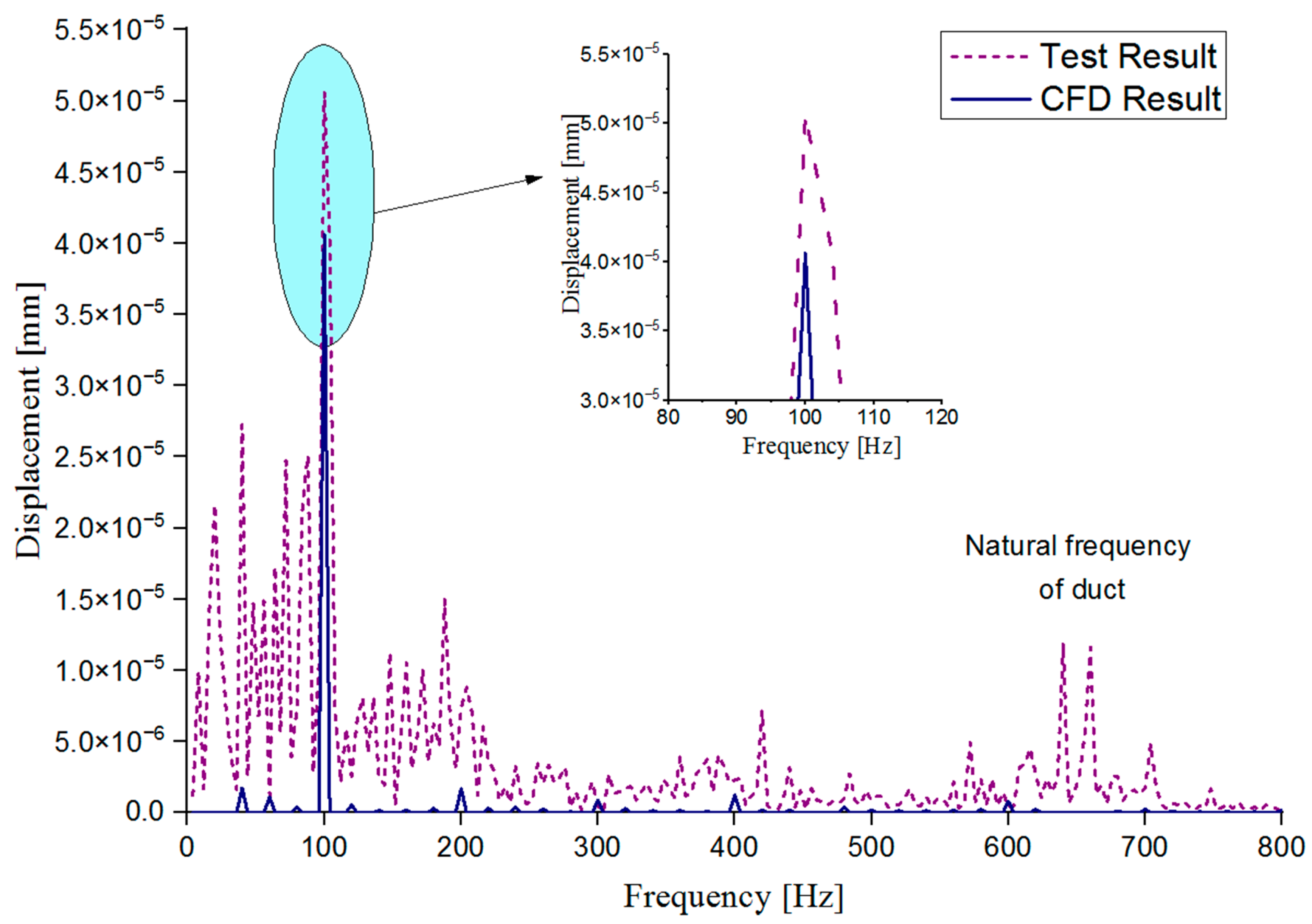
- On the pump case flange, there are more discrete line spectra in the measured vibration displacement response than in the numerical calculation results. This means that in the actual tests, there are more types of excitation, and the real physical mechanism is more complicated. At 1BPF, the test results are 25% higher than the numerical results.
- As the axial gap between the rotor and the stator increases, the fluctuating pressure on the leading edge of the stator decreases, and the unsteady axial and radial forces are reduced. In addition, the displacement response at the measuring point gradually decreases, which shows that increasing the axial gap is beneficial to weakening the flow-induced vibration response of the waterjet.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Nomenclature
| Volume force | |
| Pressure | |
| Torque of the impeller | |
| Q | Measured flow rate |
| T | Shaft torque |
| H | Pump head |
| Dr | Rotor Diameter |
| KQ | Torque coefficients |
| Shaft power | |
| Efficiency | |
| Static pressures | |
| Outlet velocities | |
| ΔT | Time step |
| BPF | Blade passing frequency |
| n | Rotation speed |
| KT | Thrust coefficients |
| Density of water |
References
- Erbe, C.; Marley, S.A.; Schoeman, R.P.; Smith, J.N.; Trigg, L.E.; Embling, C.B. The effects of ship noise on marine mammals—A review. Front. Mar. Sci. 2019, 6, 606. [Google Scholar] [CrossRef] [Green Version]
- Payne, R.; Webb, D. Orientation by means of long range acoustic signaling in baleen whales. Ann. N. Y. Acad. Sci. 1971, 188, 110–141. [Google Scholar] [CrossRef] [PubMed]
- ICES. Underwater Noise of Research Vessels: Review and Recommendations; Mitson, R.B., Ed.; ICES Cooperative Research Report No. 209; ICES: Copenhagen, Denmark, 1995; 61p, ISBN 978-87-7482-463-3. [Google Scholar] [CrossRef]
- U.S. Department of Homeland Security. 2017 Recreational Boating Statistics; Report No. COMDTPUB P16754.31; U.S. Department of Homeland Security: Washington, DC, USA, 2018. [Google Scholar]
- Erbe, C. Underwater noise of small personal watercraft (jet skis). J. Acoust. Soc. Am. 2013, 133, EL326–EL330. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Carlton, J. Marine Propellers and Propulsion; Elsevier Ltd.: Amsterdam, The Netherlands, 2007; pp. 357–358. [Google Scholar]
- Bulten, N.W.H. Numerical analysis of a waterjet propulsion system. Diss. Abstr. Int. 2006, 68, 5–199. [Google Scholar]
- Lu, Y.; Liu, H.; Wang, X.; Wang, H. Study of the operating characteristics for the high-speed water jet pump installed on the underwater vehicle with different cruising speeds. J. Mar. Sci. Eng. 2021, 9, 346. [Google Scholar] [CrossRef]
- Dai, C.; Zhang, Y.; Pan, Q.; Dong, L.; Liu, H. Study on vibration characteristics of marine centrifugal pump unit excited by different excitation sources. J. Mar. Sci. Eng. 2021, 9, 274. [Google Scholar] [CrossRef]
- Trivedi, C.; Cervantes, M.J. Fluid-structure interactions in Francis turbines: A perspective review. Renew. Sustain. Energy Rev. 2017, 68, 87–101. [Google Scholar] [CrossRef]
- Huang, R.; Ye, W.; Dai, Y.; Luo, X.; Wang, Y.; Du, T.; Huang, C. Investigations into the unsteady internal flow characteristics for a waterjet propulsion system at different cruising speeds. Ocean. Eng. 2020, 203, 107218. [Google Scholar] [CrossRef]
- Guo, J.; Chen, Z.; Dai, Y. Numerical study on self-propulsion of a waterjet propelled trimaran. Ocean. Eng. 2020, 195, 106655. [Google Scholar] [CrossRef]
- Gong, J.; Liu, J.G.; Dai, Y.X.; Guo, C.Y.; Wu, T.C. Dynamics of stabilizer fins on the waterjet-propelled ship. Ocean. Eng. 2021, 222, 108595. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, G.; Gong, J.; Yang, C. Numerical Simulation and Experimental Verification of the Nozzle Flow of a Waterjet Model. In Proceedings of the 32nd International Ocean and Polar Engineering Conference, Shanghai, China, 6–10 June 2022. [Google Scholar]
- Chesnakas, C.J.; Donnelly, M.J.; Pfitsch, D.W.; Becnel, A.J.; Schroeder, S.D. Performance Evaluation of the ONR Axial Waterjet 2 (AxWJ-2); Naval Surface Warfare Center Carderock Div Bethesda MD Total Ship Systems Directorate: West Bethesda, MD, USA, 2009. [Google Scholar]
- Dang, J.; Liu, R.; Pouw, C. Waterjet system performance and cavitation test procedures. In Proceedings of the SMP13-Third International Symposium on Marine Propulsion, Tasmania, Australia, 5–8 May 2013; pp. 87–96. [Google Scholar]
- Schmucker, H.; Flemming, F.; Coulson, S. Two-way coupled fluid structure interaction simulation of a propeller turbine. Int. J. Fluid Mach. Syst. 2010, 3, 342–351. [Google Scholar] [CrossRef]
- Wang, F.J.; Qu, L.X.; He, L.Y.; Gao, J.Y. Evaluation of flow-induced dynamic stress and vibration of volute casing for a large-scale double-suction centrifugal pump. Math. Probl. Eng. 2013, 2013, 831–842. [Google Scholar] [CrossRef] [Green Version]
- van Esch, B.; Cheng, L. Unstable operation of a mixed-flow pump and the influence of tip clearance. In Proceedings of the ASME-JSME-KSME 2011 Joint Fluids Engineering Conference, Hamamatsu, Japan, 24–29 June 2011; American Society of Mechanical Engineers: New York, NY, USA, 2011; pp. 79–87. [Google Scholar]
- Duan, X.; Tang, F.; Duan, W.; Zhou, W.; Shi, L. Experimental investigation on the correlation of pressure pulsation and vibration of axial flow pump. Adv. Mech. Eng. 2019, 11, 1687814019889473. [Google Scholar] [CrossRef] [Green Version]
- Huang, R.; Dai, Y.; Luo, X.; Wang, Y.; Huang, C. Multi-objective optimization of the flush-type intake duct for a waterjet propulsion system. Ocean. Eng. 2019, 187, 106172. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid ID | Maximum Cell Size on Blade Surface/Dr | First-Layer Cell Height from Blade Surface (mm) | Total Number of Cells (Million) |
|---|---|---|---|
| (a) | 1.4% | 0.32 | 1.17 |
| (b) | 1.0% | 0.23 | 3.20 |
| (c) | 0.71% | 0.16 | 8.65 |
| (d) | 0.5% | 0.11 | 23.28 |
| Mass Flow Rate (m3/s) | Head (m) | Power (kW) | Rotation Speed (r/min) | Pump Efficiency | Head Error | Power Error |
|---|---|---|---|---|---|---|
| 1.295 | 10.57 | 152.4 | 697.7 | 0.877 | 1.8% | 0.8% |
| 1.549 | 14.91 | 256.7 | 830.0 | 0.879 | 1.8% | 1.3% |
| 1.742 | 19.27 | 372.9 | 941.8 | 0.879 | 1.3% | 0.3% |
| Thrust (N) | Divided by A1 | Moment (N·m) | Divided by A1 | |
|---|---|---|---|---|
| A1 (Axial Gap 1) | 33,920.0 | 1.00 | 6509.5 | 1.00 |
| A2 (Axial Gap 2) | 32,305.2 | 0.95 | 6509.9 | 1.00 |
| A3 (Axial Gap 3) | 32,234.7 | 0.95 | 6478.2 | 1.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, Y.; Liu, Z.; Zhang, W.; Chen, J.; Liu, J. CFD-FEM Analysis of Flow-Induced Vibrations in Waterjet Propulsion Unit. J. Mar. Sci. Eng. 2022, 10, 1032. https://doi.org/10.3390/jmse10081032
Dai Y, Liu Z, Zhang W, Chen J, Liu J. CFD-FEM Analysis of Flow-Induced Vibrations in Waterjet Propulsion Unit. Journal of Marine Science and Engineering. 2022; 10(8):1032. https://doi.org/10.3390/jmse10081032
Chicago/Turabian StyleDai, Yuanxing, Zhenghao Liu, Wei Zhang, Jianping Chen, and Jianguo Liu. 2022. "CFD-FEM Analysis of Flow-Induced Vibrations in Waterjet Propulsion Unit" Journal of Marine Science and Engineering 10, no. 8: 1032. https://doi.org/10.3390/jmse10081032