1. Introduction
A dynamic positioning (DP) system maintains a ship’s position and heading or moves a ship along a predetermined trajectory by employing its thruster system [
1]. In the 1960s, DP controllers were presented using conventional control methods [
2]. Additionally, research into DP nonlinear control design gained more attention in the 1990s. In [
3], a nonlinear observer backstepping controller was presented for DP systems, and its globally exponentially stable (GES) quality was illustrated via the Lyapunov stability theory. In [
4], a passive and GES nonlinear observer was developed using the nonlinear kinematic equation of motion to estimate low-frequency position, the velocities of ships, and environmental disturbances, where environmental disturbances were defined as slowly varying biases induced by wind, currents, and waves. By using the observers in [
4], a proportional derivative control law with estimates of environmental disturbances was presented; the designed controller achieves a GES position and heading tracking, and the performance of the control system was demonstrated by an experiment with a scaled ship model in [
5]. Thus far, disturbance observers [
4,
5,
6] have been applied to the designed DP controllers and can considerably attenuate the effects of environmental disturbances. To further improve control performance, some nonlinear techniques with various disturbance observers and adaptive strategies, such as the adaptive method [
6], backstepping [
7,
8], fuzzy logic [
9], and sliding mode control scheme [
10], have been introduced to the control design for DP ships with external disturbances. In [
6], a global output-feedback control scheme was proposed, whereby disturbances that act on DP for ships were taken as unknown constant disturbances and estimated by an adaptive algorithm. The approach presented in [
7] was similar in that it assumes that the disturbances are constant; however, this robust adaptive controller presented for DP systems requires the known upper bound of the disturbances.
In the above analyses, external disturbances are generally treated as invariants, or else knowledge about the nature of the disturbances is needed for control design. However, in practice, sea states are constantly changing and have limited energy, which determines that the disturbances acting on the DP systems of ships are unknown, time-varying, and bounded, and their boundedness cannot be calculated exactly. Taking into account unknown time-varying environmental disturbances, Du et al. [
8] developed an output-feedback control law for the DP system of a ship, which can achieve disturbance suppression using a high gain observer; however, during the design process, the system must be given prior information on the upper bounds of the disturbances. In [
9], a fuzzy DP control law was developed for a ship DP system with unmodeled dynamics and external disturbances, where the first derivative of the disturbance is not required to be close to zero. In [
10], a finite-time controller with a nonlinear disturbance observer was presented, where the proposed nonlinear disturbance observer did not require prior information on the disturbances and accurately determined the boundedness of the disturbance estimation errors.
As we can see from the examples given above, actuator dynamics tend not to be considered in control design [
8,
9,
10]. In practice, the control design for a ship DP system with unknown time-varying disturbances and actuator dynamics makes DP control more complicated. Therefore, in recent years, more research has focused on improving the dynamic characteristics and stability of DP control systems.
Other factors to consider relate to extreme sea states and input saturation. In [
11], a fuzzy control law was developed for a DP system with multiplicative noise, where the controller can achieve asymptotic state tracking by seeking the stability condition for the closed-loop system, subject to actuator saturation. In [
12], a guaranteed cost controller was proposed for the DP system of a marine surface vessel with external disturbances and input saturation; the magnitude constraints of the control inputs were transformed into linear matrix inequalities, which were achieved by seeking a feasible control objective. In [
13], a robust DP controller with a nonlinear disturbance observer was presented; here, input saturation was handled by the auxiliary system. Similarly, control schemes with the aid of an auxiliary system were proposed in [
14,
15,
16,
17]. In addition, Qiu et al. [
14] proposed a practical adaptive sliding-mode control scheme for an unmanned surface vehicle; however, the basic sliding mode controller only achieved asymptotic stability. In [
15], a finite-time control scheme was proposed to guarantee the boundedness of the position error, where the unknown varying-time disturbances were treated by an adaptive scheme with no prior information on the disturbances. The authors of [
13,
17] assumed both the maximum and the minimum generalized forces to be constant throughout the control process; however, the bound of generalized forces produced by the propulsion system is, in practice, time-varying because each actuator command is constrained by its thrust magnitude, the turning rate of the thrusters, and azimuth angles. Therefore, considering the effect of known magnitude, rate, or bandwidth constraints, Li et al. [
17] proposed an auxiliary system to handle input magnitude limitations and rate constraints; however, the magnitude and rate saturation limitations of thruster forces are considered constant in this simulation. Farrell et al. [
18] proposed a new backstepping controller, which used an online system to approximate the original system with physical limitations.
Therefore, to better reflect the physical characteristics of the thrusters, Fossen [
19] proposed actuator dynamics, which were widely applied in the design of controls [
16,
20,
21]. In [
20], a nonlinear vectorial backstepping control law was designed for ship DP systems using actuator dynamics, and the global exponential stability of the control system was demonstrated according to Lyapunov stability analysis. In [
21], an adaptive controller was designed to address uncertain parameters, and actuator dynamics were introduced to handle the input constraints.
The above-mentioned sources make the unreasonable assumption that the thruster saturation is a prior constant. Taking the thrust magnitude as an example: if the assumed constraint thrust magnitude is too large or too small, the performance of the system will be degraded, and instability could arise. Therefore, a joint-control scheme with control allocation was proposed in [
22,
23,
24,
25]; this system was applied to obtain information about whether or not the actuator is saturated. In [
22], an anti-wind-up PI strategy with control allocation was proposed for the DP system of a vehicle. Perez [
23] extended the work of [
22] and proved its closed-loop asymptotic stability for position regulation. However, environmental disturbance suppression was not considered. The research of [
24] proposed a model predictive control algorithm and yielded a near-optimal controller output for vehicle DP by solving the problem of continuous-time numerical optimization. In [
25], an output-feedback fault-tolerant controller was developed for vessel DP, where an auxiliary dynamic system was introduced to handle the effect of thruster faults and saturation constraints; however, the bound of each thruster saturation constraint was considered a known constant.
Furthermore, the DP control systems above are all asymptotically stable, which implies that the DP system achieves its control goal with infinite time. Finite-time control using the terminal sliding mode (TSM) method can speed convergence to equilibrium. Moreover, a closed-loop system with a finite-time controller generally shows better anti-disturbance and higher-accuracy performance. Therefore, due to its inherent robustness, finite-time DP control has been gradually gaining popularity [
10,
26,
27]. In [
26], a passive fault-tolerant controller was developed using a nonsingular integral terminal sliding mode, which achieves global finite-time convergence of tracking errors. In [
27], an adaptive nonsingular fast terminal sliding-mode control was proposed for a nonlinear system with external disturbances, which achieves finite-time tracking control at a fast convergence rate and ensures chattering-free dynamics.
In summary, we can see that there exist two important issues for DP control design: namely, disturbance suppression and actuator constraint. With regard to the first issue, sea states are known to be constantly changing and have limited energy. Previous research does not sufficiently reflect the time-varying of environmental disturbances because it either assumes that the upper bound of environmental disturbance is known or uses constant disturbances in simulation and only achieves asymptotic disturbance suppression. Concerning the second issue, actuator constraints are, in practice, undoubtedly important for DP control design. However, the time-varying nature of actuator saturation is ignored in many previous studies, such as [
13,
15,
18]. In other studies, such as [
19,
20,
21,
22,
23,
24,
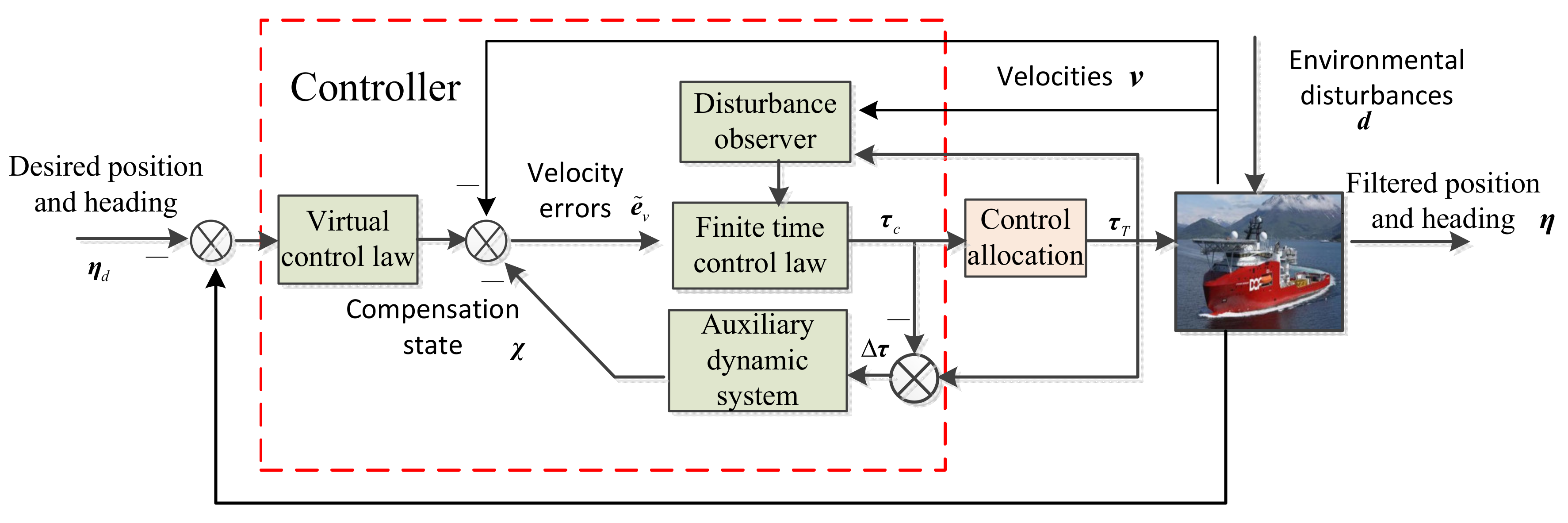
25], the physical properties of the thruster are not fully considered. Therefore, focusing on unknown time-varying disturbances and actuator constraints in this paper. We present a disturbance observer-based finite-time control scheme with control allocation for DP systems for ships. The finite-time disturbance observer is used to estimate the unknown time-varying disturbances, the control allocation is applied online to inform the controller about actuator saturation, and the auxiliary system dynamic is constructed to handle velocity deviation. Furthermore, the closed-loop system has finite-time stability. To the best of the authors’ knowledge, this is the first published study of DP control design that both considers finite-time disturbance suppression and presents an auxiliary dynamic system designed for a joint system. The main contributions of this paper are as follows:
- (i)
An adaptive finite-time disturbance observer is constructed to estimate unknown time-varying disturbances. It does not require prior information about the disturbances and can eliminate undesired chattering.
- (ii)
An auxiliary dynamic system is constructed to handle the input constraints. It reduces the tracking deviation caused by the mismatch between the forces produced by the thruster system and the desired control law.
- (iii)
By combining control design and control allocation, a finite-time control scheme with a disturbance observer and an auxiliary dynamic system is presented; this scheme can achieve disturbance suppression and handle actuator constraints. Due to the fast exponential reaching law, the controller reduces undesired chattering.
The paper is organized as follows. Preliminaries and problem formulations are described in
Section 2. The two finite-time disturbance observers, the control design, and the control allocation are given in
Section 3; in this section, we also propose the finite-time controller with a disturbance observer and an auxiliary dynamic system for ship DP systems. The results and discussion are presented in
Section 4. Conclusions are drawn in
Section 5.
4. Results and Discussions
To evaluate the effectiveness of the control scheme proposed in
Section 3, we present simulations of a cable-laying ship with a DP system. The main information about the ship is listed in
Table 1.
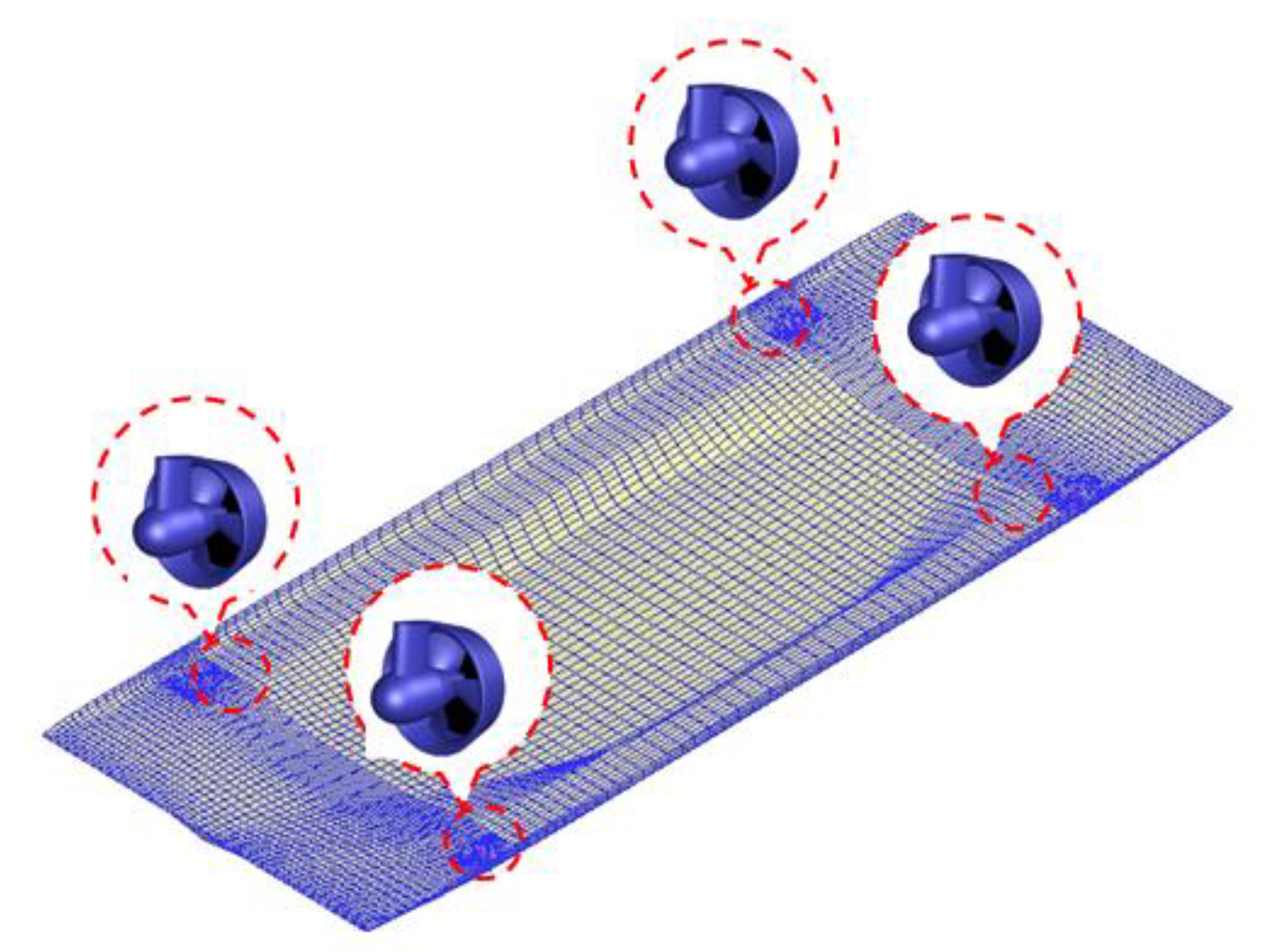
The ship is equipped with four same-type azimuth thrusters (two located aft and two in the fore). The four azimuth thrusters are fixed-pitch, with a maximum thrust of 65 kN in open water, and are symmetric along the longitudinal and transverse middle sections. The sketch of thruster positions is shown in
Figure 3.
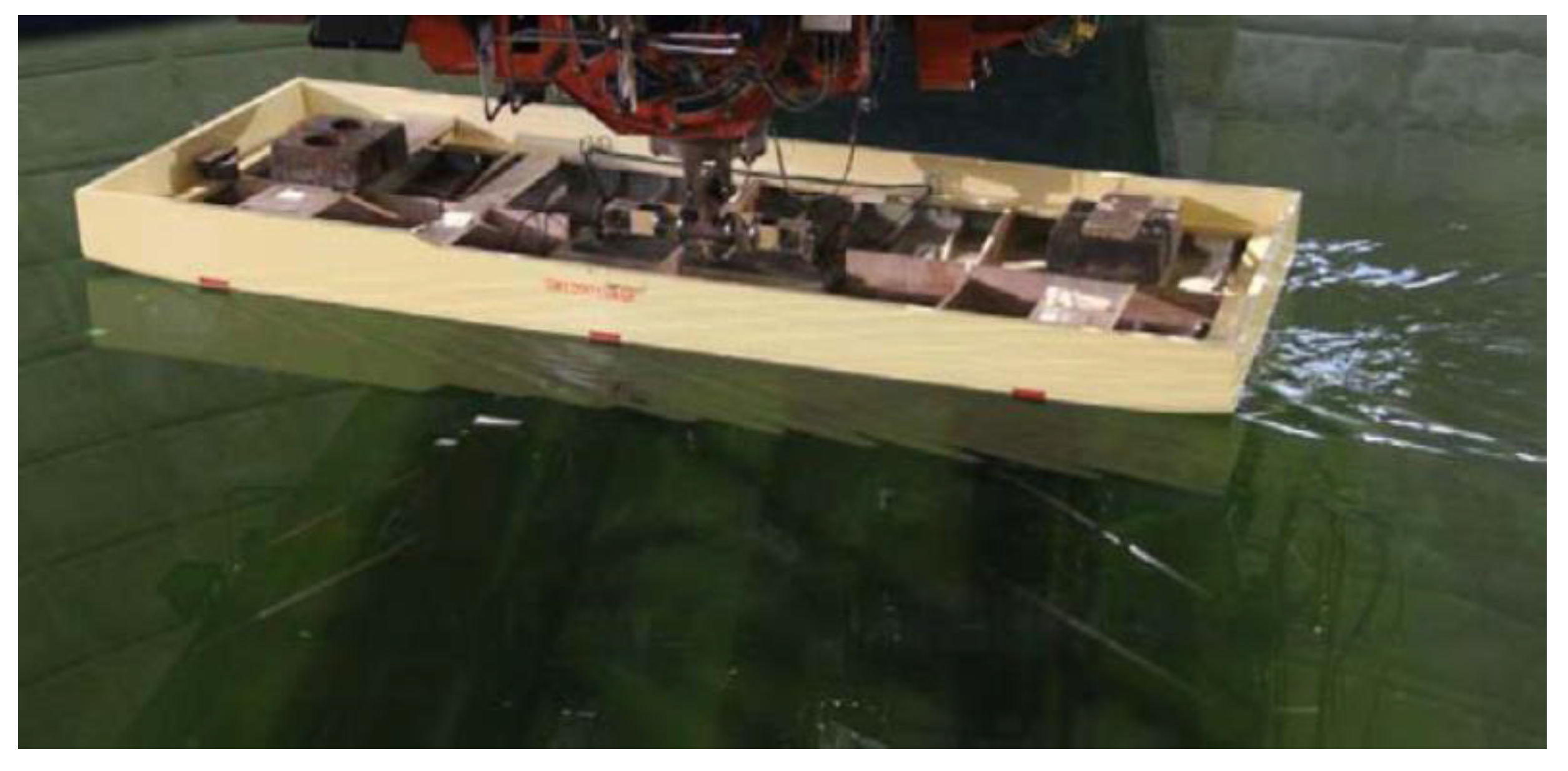
In order to obtain the inertia matrix
and the damping matrix
, a 1/25 captive model test was carried out at the China Ship Scientific Research Center (CSSRC). The test photo is shown in
Figure 4.
Additionally, the parameters of the ship’s dynamic model are given as follows:
The marine environmental parameters are given in
Table 2.
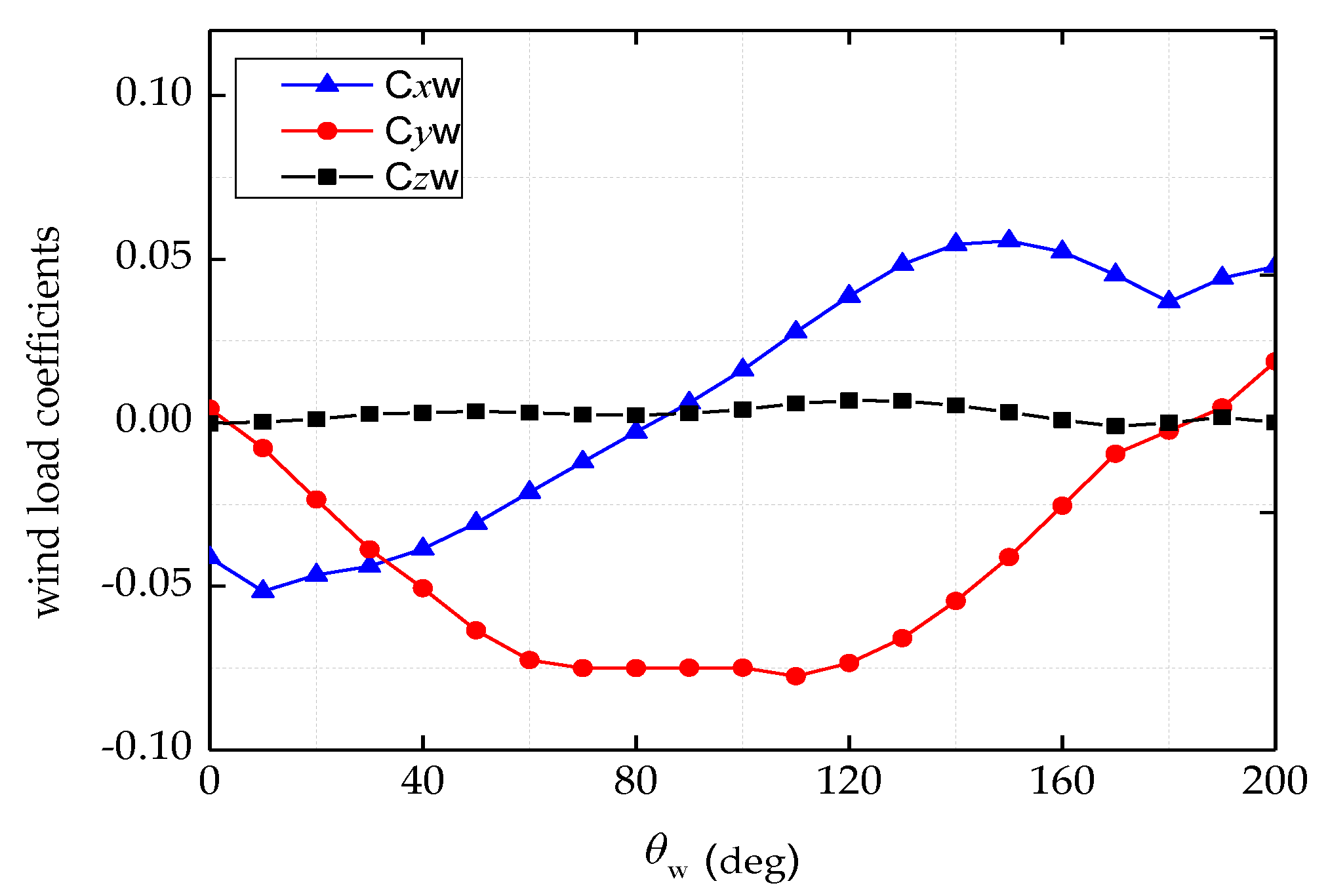
Wind, second-order wave, and current loads in the surge, sway, and yaw directions are defined as follows:
where
denotes the overall length of the ship,
is the air density, and
is the wind speed. The non-dimensional wind load coefficients
,
, and
are functions of the relative wind direction
.
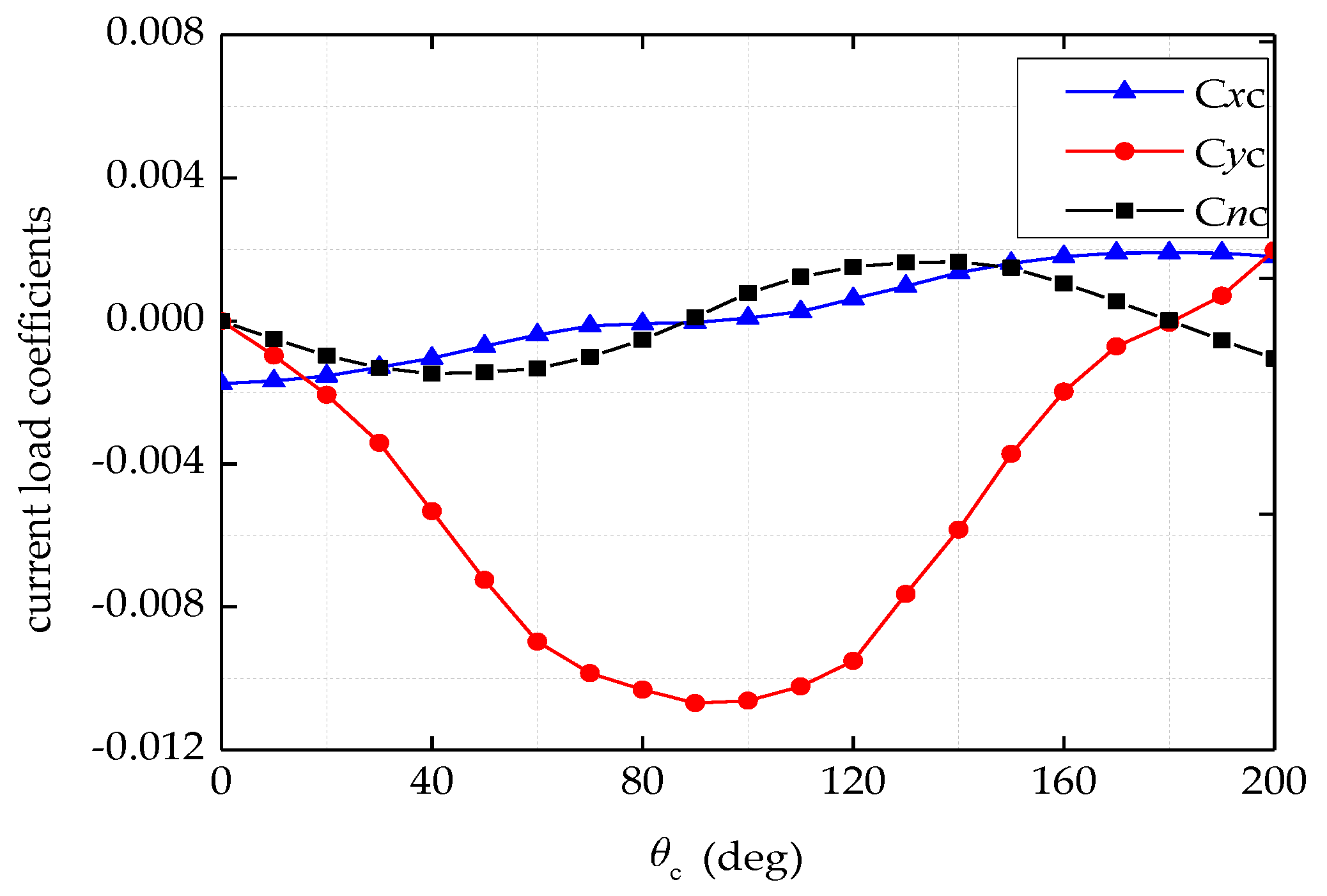
and
are the water density and the current speed, respectively. The non-dimensional current load coefficients
,
, and
are functions of the relative current direction
.
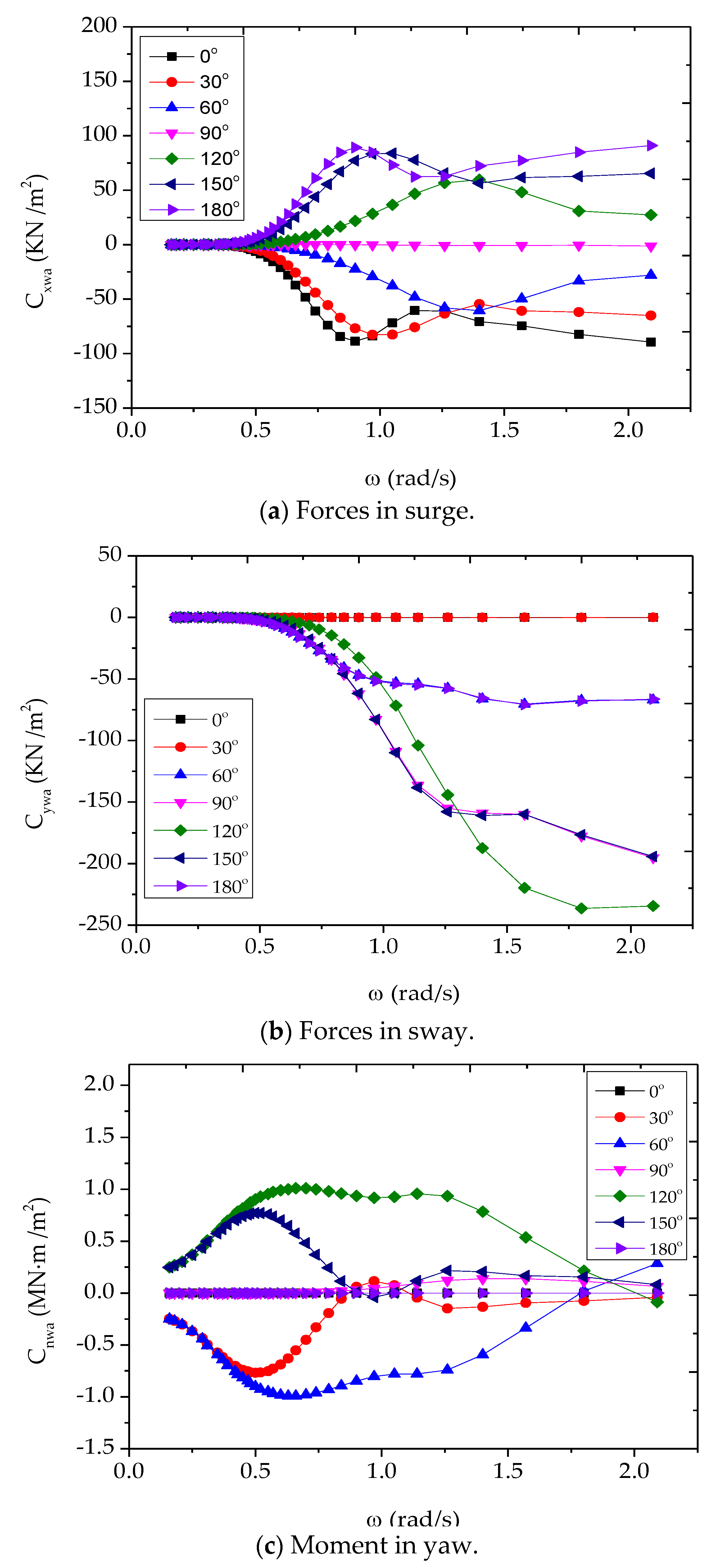
is the wave spectral density function, and
is the wave frequency. The second-order wave force transfer functions
,
, and
are functions of relative wave direction
and wave frequency
.
Wind and current load coefficients were obtained by a wind tunnel test in CSSRC. Second-order wave force transfer functions were obtained by numerical calculation using the software Advanced Quantitative Wave Analysis (AQWA). The results are shown in
Figure 5,
Figure 6 and
Figure 7.
The desired position and heading were set as . The initial states , , , and were selected.
In a simulation, the design parameters should be large in order to speed up the convergence rate; however, parameters that are too large will cause great fluctuation. The design parameters , , , and cannot be too large, because they play an important role when the errors are close to equilibrium. The parameter should satisfy , and its adjustment method is the same as that of , as shown in Remark 3.
Therefore, the disturbance observer parameters were chosen as
, , and .
The adaption update law parameter was chosen as .
The controller parameters were selected as , , , , , and .
The following simulations are performed in two parts. In
Section 4.1, the performance of the developed finite-time control law and the effectiveness of the designed disturbance observer are specifically evaluated, and the advantages of the ADO for unknown environmental disturbances are verified. In
Section 4.2, we evaluate the performance of the proposed controller with the ADO and the auxiliary dynamic system for the cable laying ship, subject to unknown environmental disturbances and actuator saturation.
4.1. DP System with Environmental Disturbance
Here, we assume that the control law is executed completely; that is,
and
. As such, the simplified finite-time control (SFTC) law is given by
In order to illustrate the performance of the SFTC scheme, a simulation comparison is presented by applying the nonsingular integral terminal sliding mode (NITSM) surface in [
10], where the NITSM control law is given by:
where
. A detailed description of this control law can be found in [
10]. The design matrices satisfy
; in simulation, the control gain
should be increased to ensure the desired convergence speed of the system. Correspondingly, the control gain
of the switching function needs to be as small as possible to ensure chattering reduction; however, a
value that is too small cannot guarantee a fast convergence rate of the state when the system is close to a steady state. Therefore, the control parameters were selected as
,
,
,
.
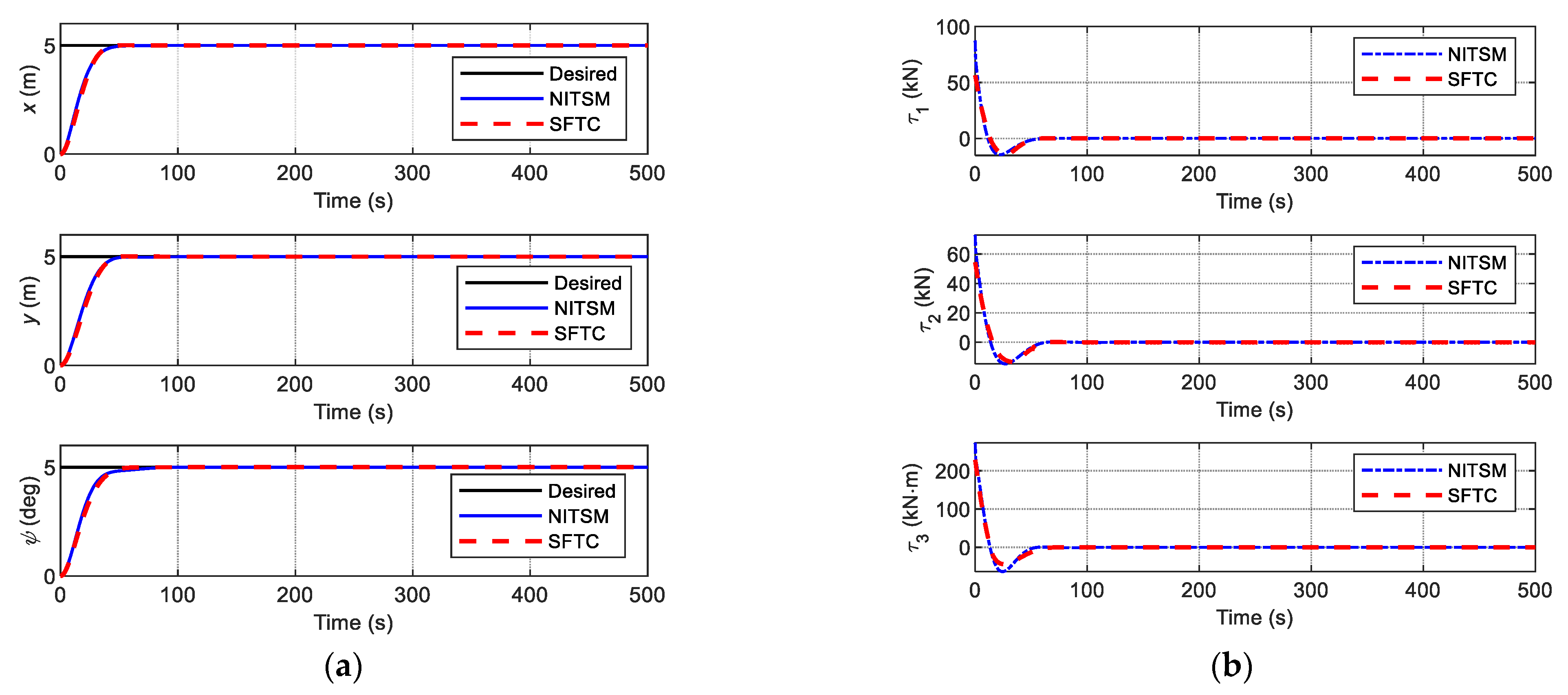
First, considering the ship DP without environmental action, i.e.,
, the comparison of the desired and actual position and heading of the ship are shown in
Figure 8a. It is obvious that both control schemes have satisfactory control performance, and the position and heading can track the predetermined trajectories at a fast convergence rate. Moreover, the control inputs, as shown in
Figure 8b, are all smooth, and the control inputs of the proposed SFTC scheme are much smaller than those of the NITSM control scheme.
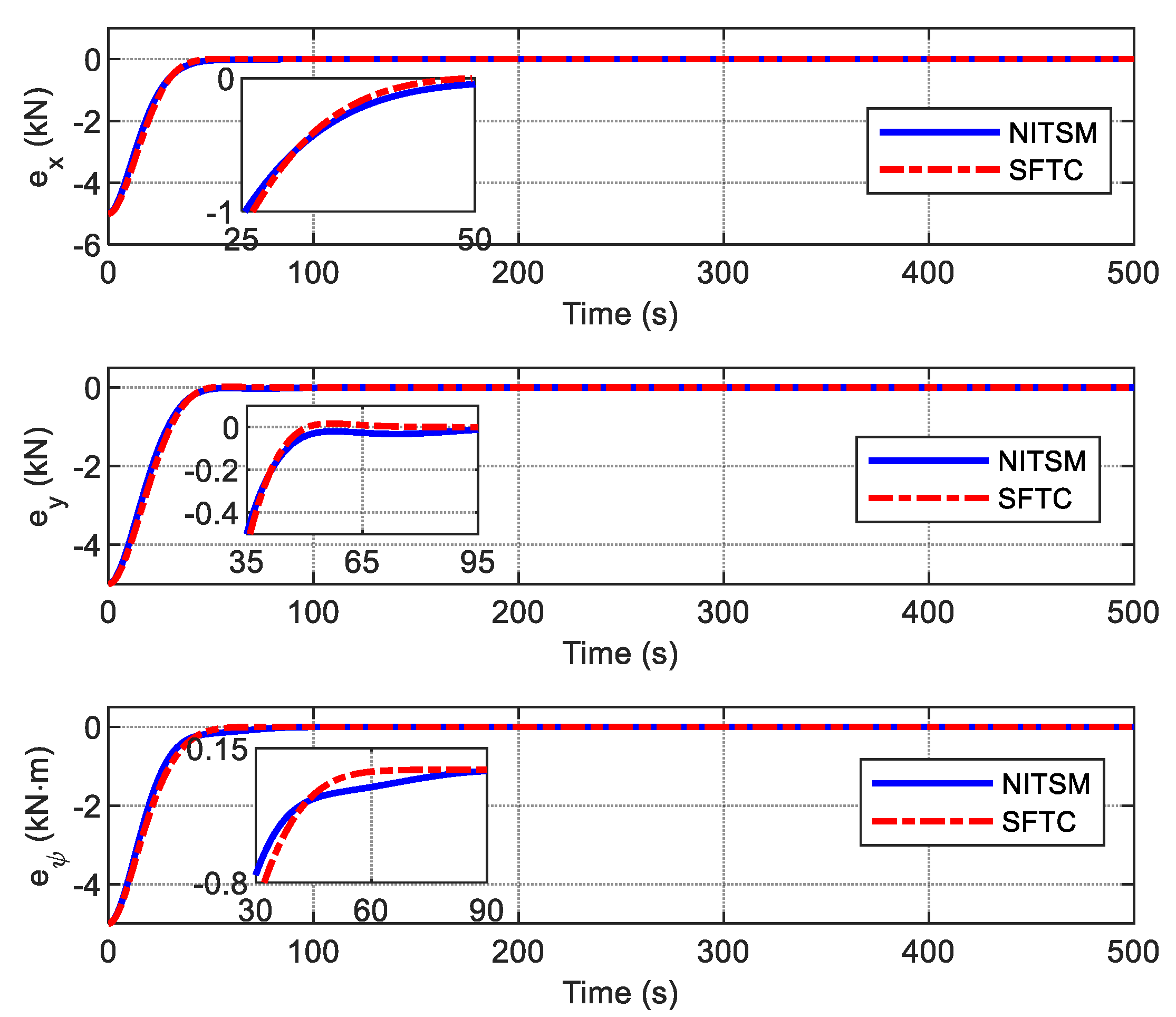
In order to better observe the dynamic response of trajectory tracking, time responses for the tracking errors are given in
Figure 9; this shows that the tracking errors converge to zero in finite time for the proposed SFTC scheme and the NITSM control scheme in [
10]. In the first 30 s, the convergence rate of tracking errors for the proposed SFTC scheme is slower than that of the NITSM control scheme, but as time progresses, it is obvious that the convergence rate for the SFTC scheme becomes faster. The reason for this is that the SFTC scheme with the exponential item can guarantee a fast convergence rate when the tracking errors are close to zero. However, the NITSM control scheme adopts a switching function approach law. Thus, if the tracking errors are required to converge to zero at a fast convergence rate, the selected design parameter
must be large enough; however, if the
parameter is too large, it will induce a chattering phenomenon in the control inputs. In summary,
Figure 8 and
Figure 9 verify that the proposed SFTC scheme achieves its aims of having a fast convergence rate and decreasing undesired chattering.
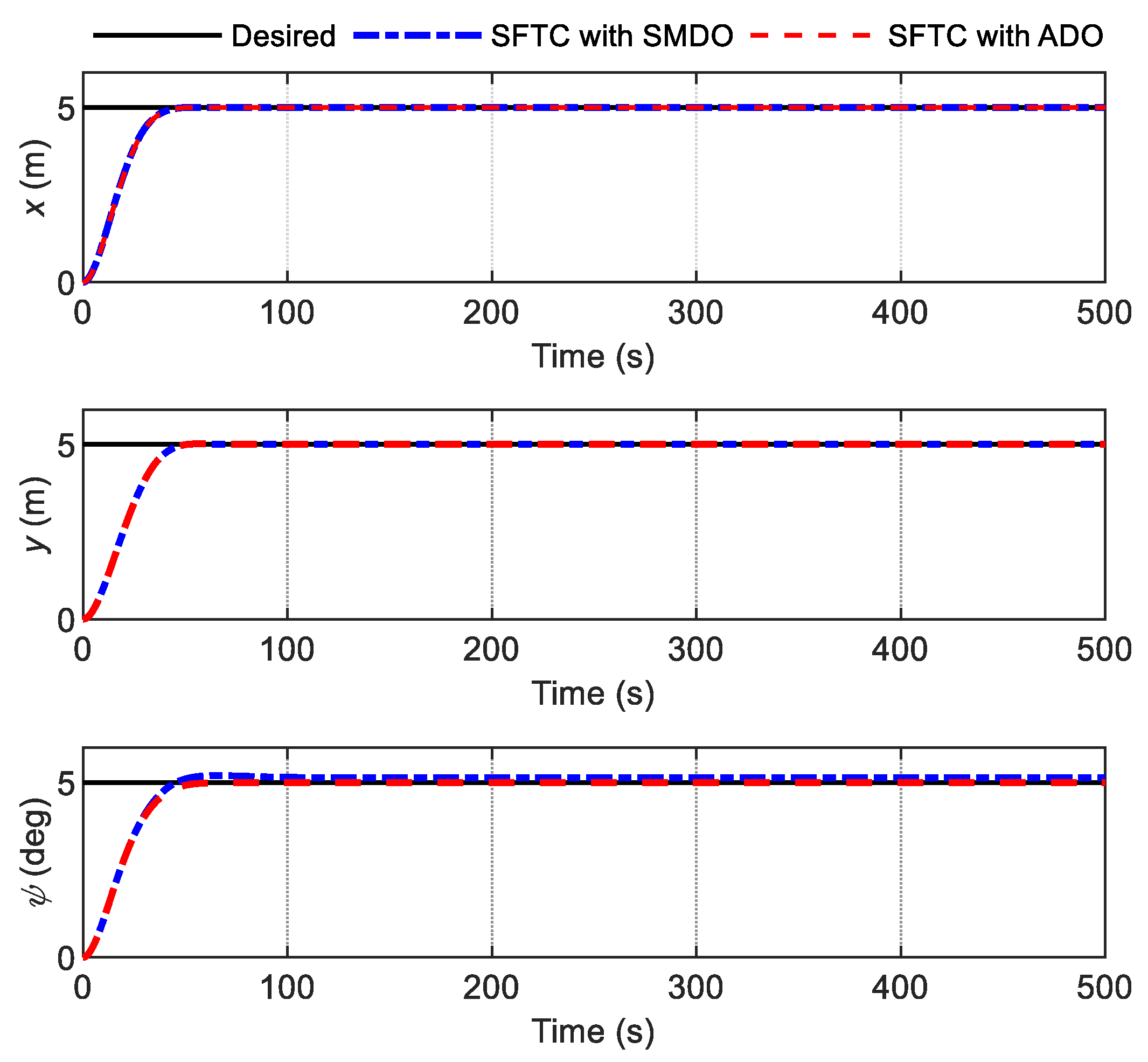
Then, taking into account the environmental parameters of Case 1, as shown in
Table 2, a comparison simulation is provided to evaluate the effectiveness of the two designed disturbance observers. The positioning results for the DP system under the proposed SFTC scheme are shown in
Figure 10. It is observed that the SFTC scheme with ADO achieves rapid convergence of position and heading tracking. However, the disturbance-suppression performance of the SFTC scheme with SMDO is poor; there exists significant heading-tracking steady-state errors of about 0.09 deg. This is because the upper bound value
selected in SMDO is much smaller than the actual disturbance
, as shown in
Figure 11, meaning that the environmental disturbances acting on the heading have not been effectively offset.
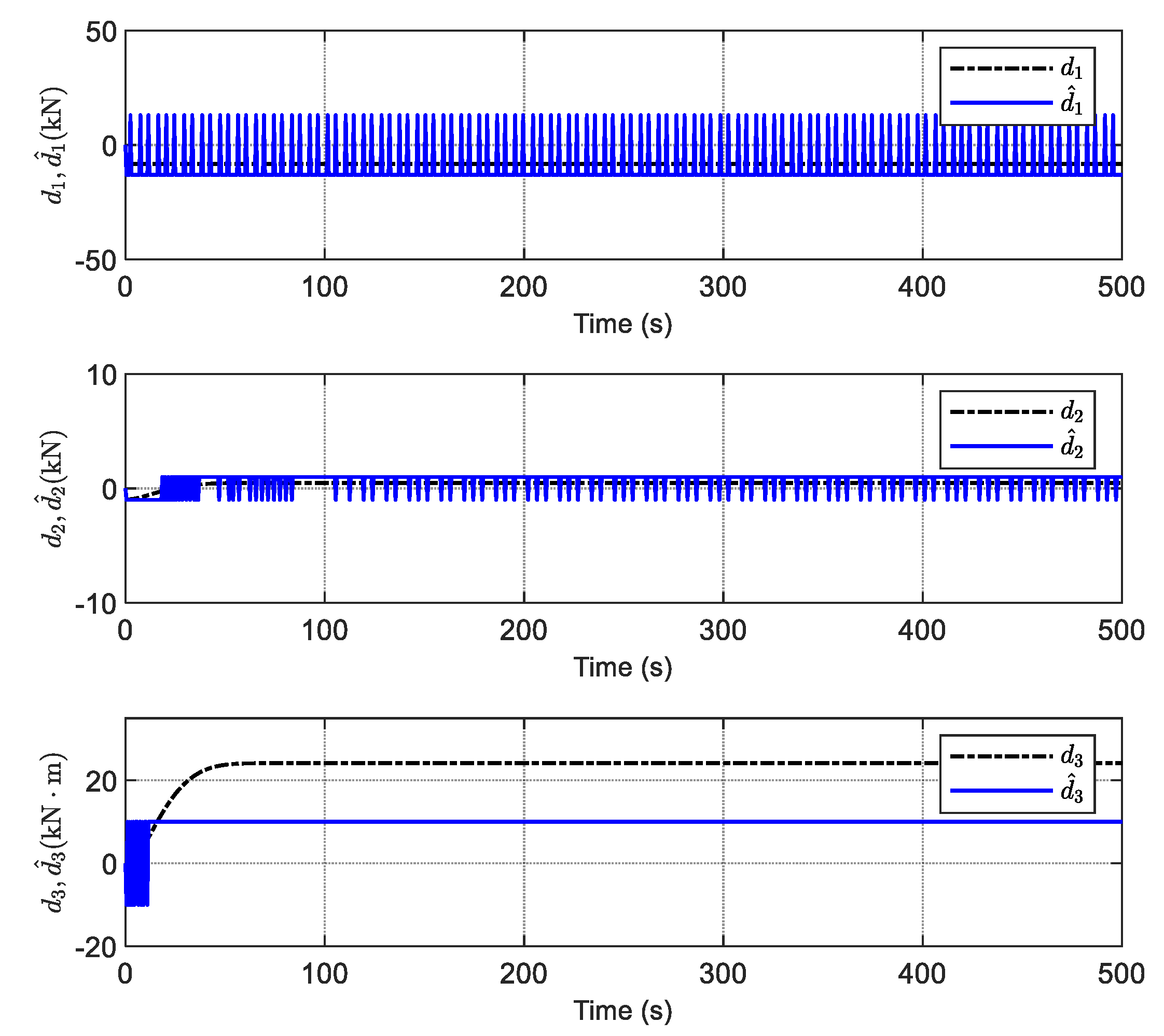
The estimation of disturbances via SMDO is given in
Figure 11, which shows that the high-frequency-switching observed values lead to undesired chattering. As has been established, the upper bound of the environmental disturbance required for the SMDO design cannot be calculated exactly, and if the selected upper bound is too large, it will lead to the chattering of the control inputs. However, if the selected upper bound is too small, it cannot effectively compensate for the disturbances. As shown in
Figure 11, it is obvious that the chosen
values are too large to cause chattering; however, the chosen
is too small to result in a large estimation error. All the analyses mentioned above will eventually lead to the degradation of the performance of the DP system under the SFTC scheme with SMDO, as shown by the blue dotted line in
Figure 10.
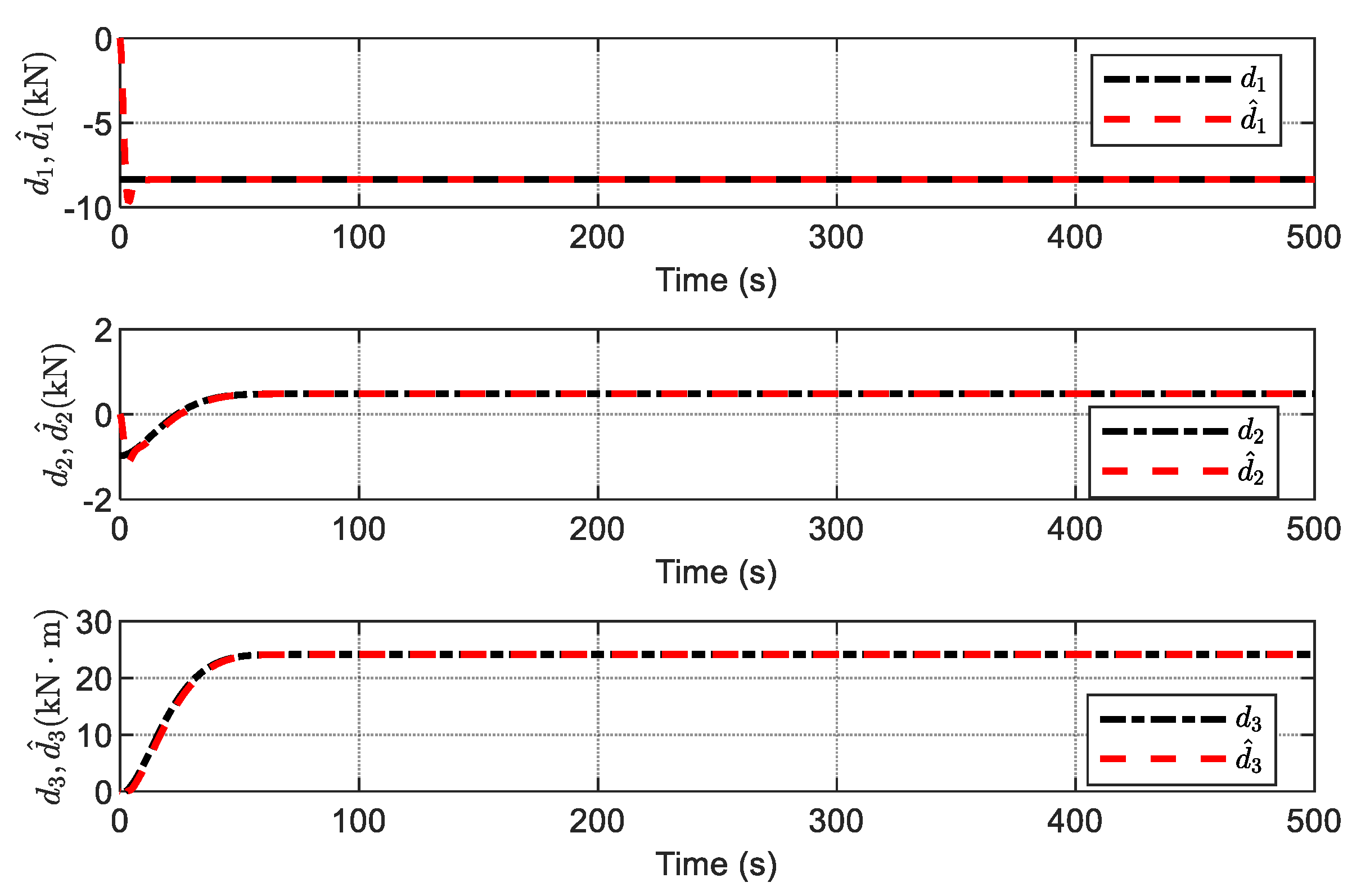
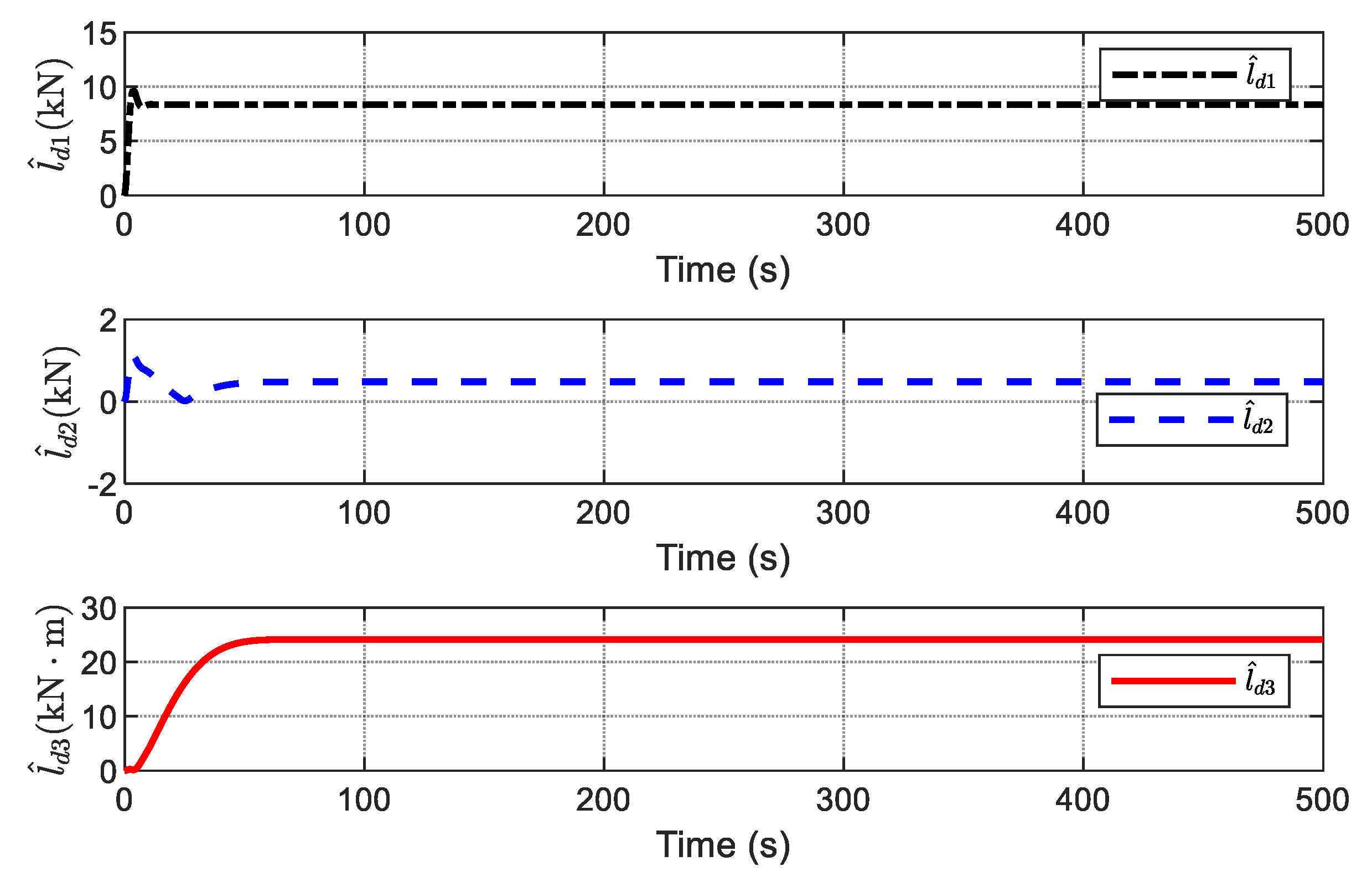
In order to eliminate the chattering, an adaptive scheme (namely, ADO) is introduced to modify the SMDO. The estimations of a disturbance generated using the ADO are shown in
Figure 12, achieving a decrease in chattering compared with the results shown in
Figure 11.
Figure 13 shows the estimation of the upper bounds of unknown disturbances. From
Figure 12 and
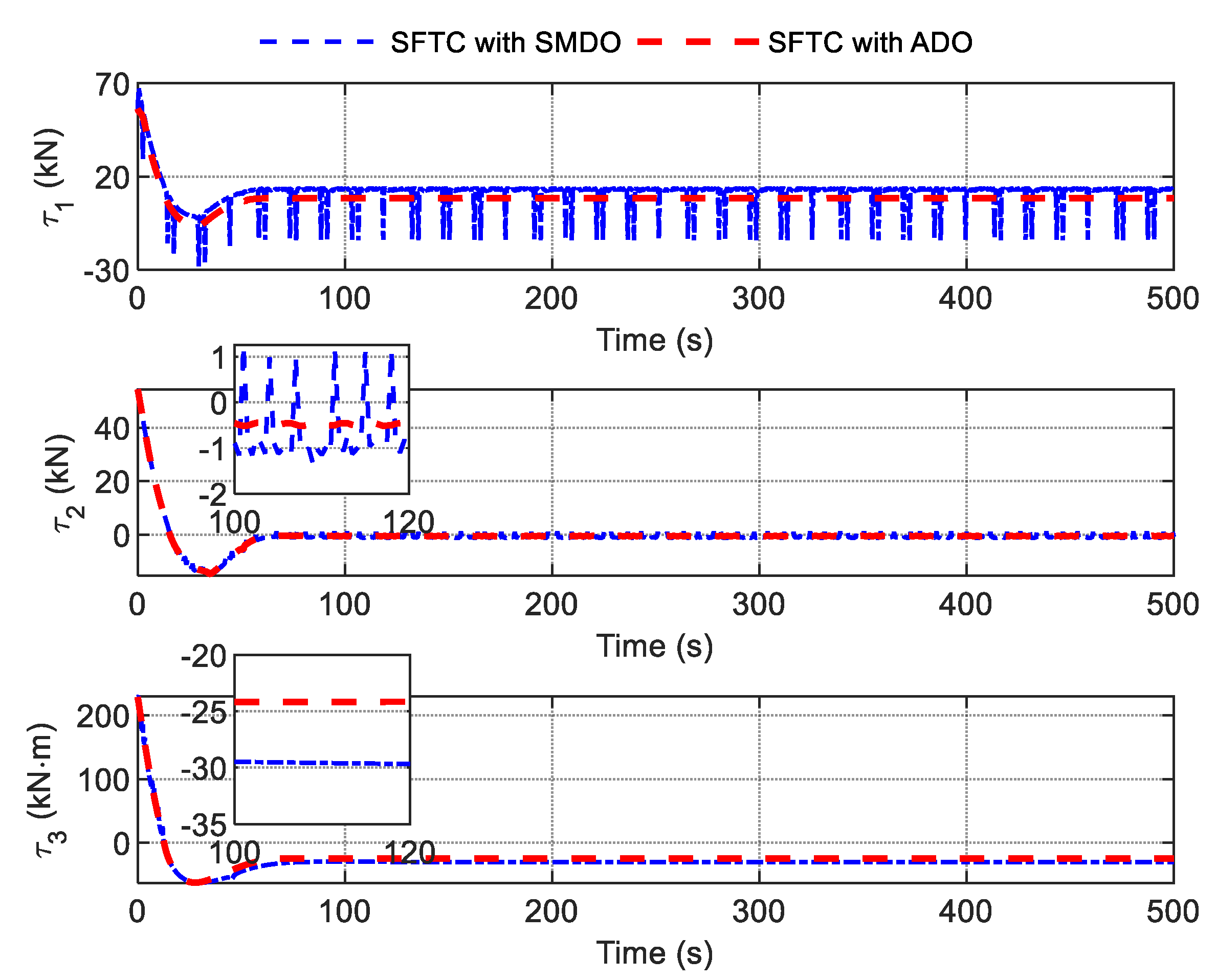
Figure 13, it is observed that the estimation of the upper bound is highly consistent with the absolute value of the estimation of disturbances; thus, the effectiveness of the ADO is verified. The command control inputs are shown in
Figure 14, which shows that the control inputs of the SFTC with ADO are much smoother than those of the SFTC with SMDO, and chattering is reduced. The above simulation results show that the proposed SFTC scheme with ADO is more effective for the DP system for ships in the presence of unknown time-varying disturbance.
4.2. DP System with Environmental Disturbances and Actuator Constraints
The objective of this subsection is to demonstrate the effectiveness of the proposed finite-time control scheme, which includes the designed ADO and the auxiliary dynamic system (29). Here, using the marine environmental parameters of Case 2, which are given in
Table 2, the system’s initial states and the parameters needed for the disturbance observer and controller are all the same as mentioned above. The DP system for ships has four actuators. The designed control law is distributed into each actuator. According to whether the proposed control scheme has the ADS, the simulations are carried out in the following two cases.
For simplicity, finite-time control is noted as FTC, and auxiliary dynamic system is noted as ADS in the following simulations.
Case 1: FTC with ADO.
Using the proposed FTC with ADO alone, the simulation results are shown in
Figure 15,
Figure 16 and
Figure 17. In
Figure 15, it can be observed that the curves of the actual position and heading of the ship fluctuate greatly; the time taken to reach the steady state (about 100 s) is much longer than the time (about 50 s) shown by the red dotted line in
Figure 10. The reason for this is that the errors between the actual and desired trajectories are too large in the initial stage; control inputs try to reduce these differences by responding quickly. However, the calculated command control inputs have not been exactly executed by the thrusters due to the physical limitations of the actuators, as shown in
Figure 16. The forces of each thruster are shown in
Figure 17, and it is observed that the forces required for each thruster cannot be produced due to the amplitude limitations of the turning rate of the thrusters in practice.
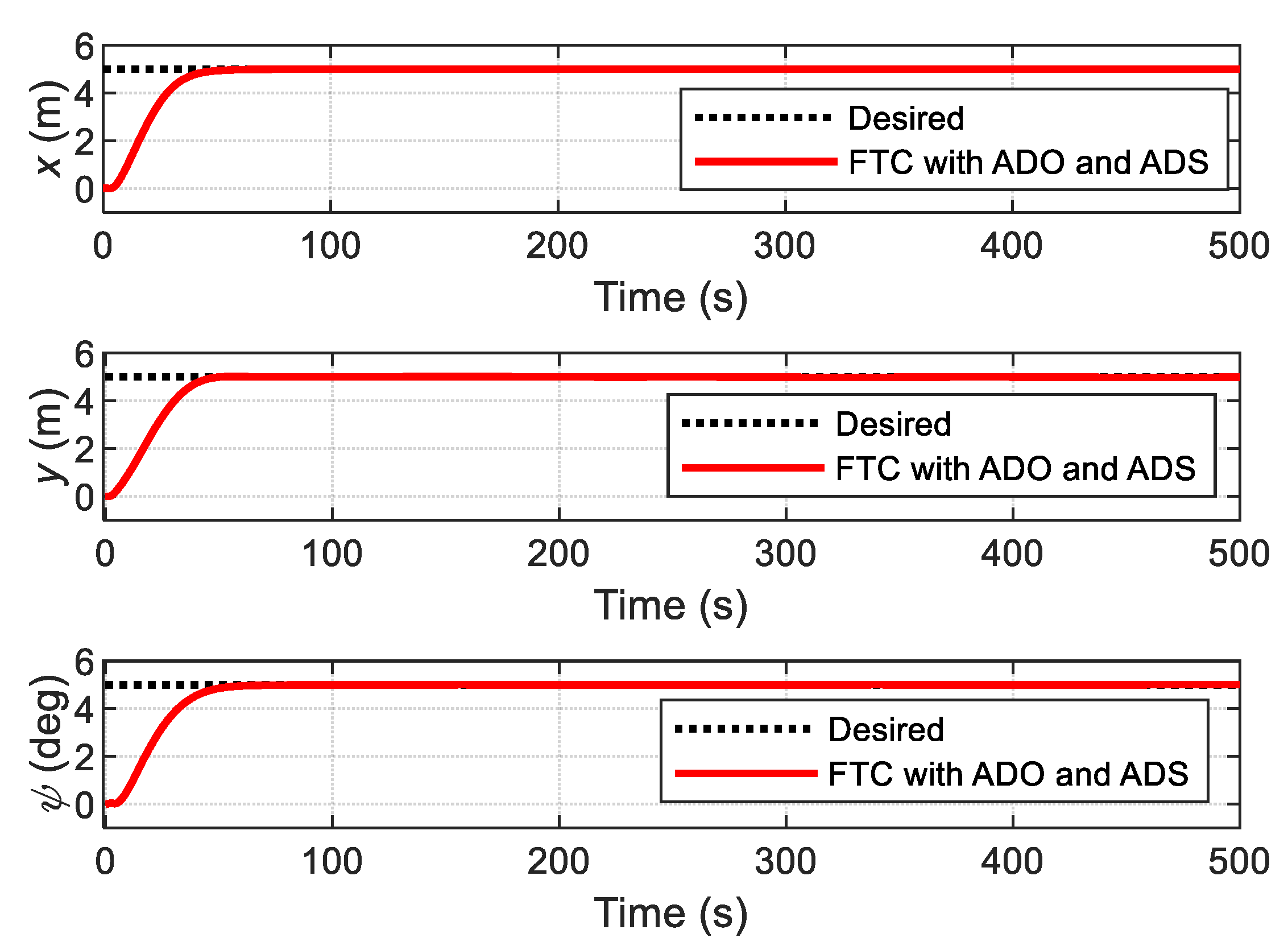
Case 2: FTC with ADO and ADS
The performance of the proposed FTC with ADO and ADS is evaluated, where the ADS is applied to deal with the actuator constraints, and its design parameter is selected as
. The curves of the position and heading of the ship are depicted in
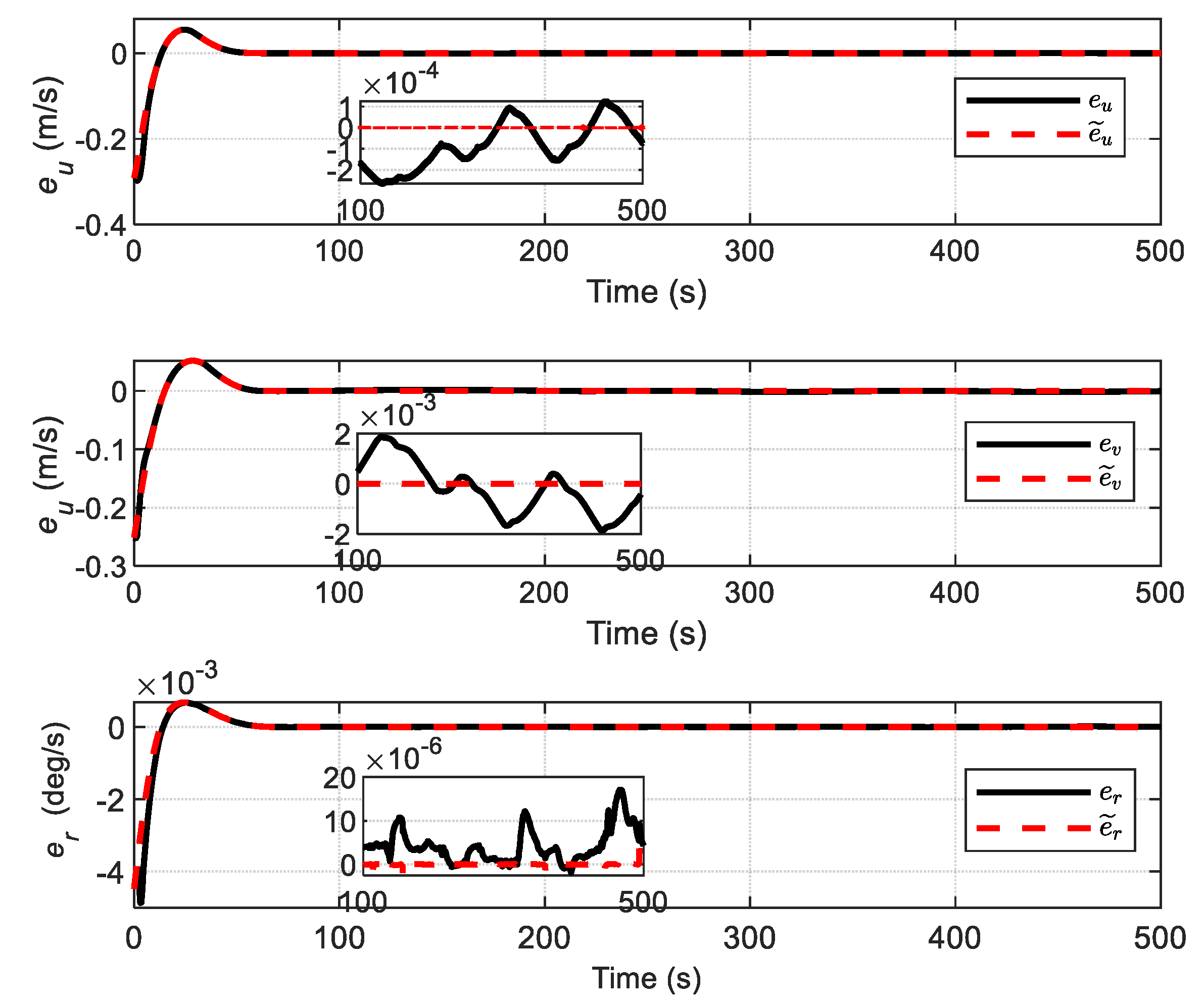
Figure 18; the position performance is found to be improved, in terms of convergence time, compared with that of FTC with ADO alone. Furthermore, the original velocity tracking errors
are iteratively compensated using the ADS so that the modified velocity tracking errors
are closer to zero, as shown in
Figure 19. Moreover, the deviations between
and
(that is, the state vector of ADS) are bounded, and the theoretical analysis is verified.
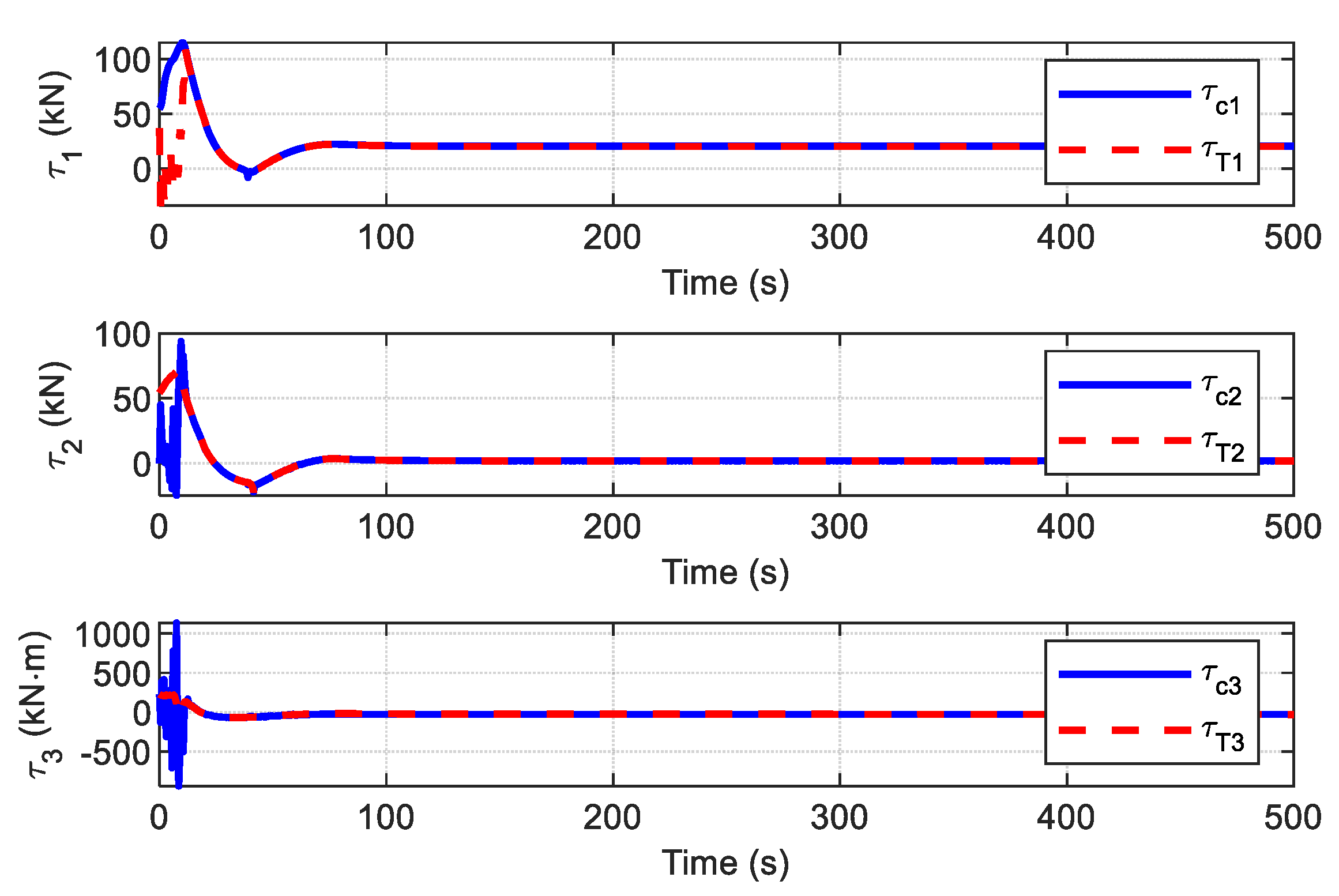
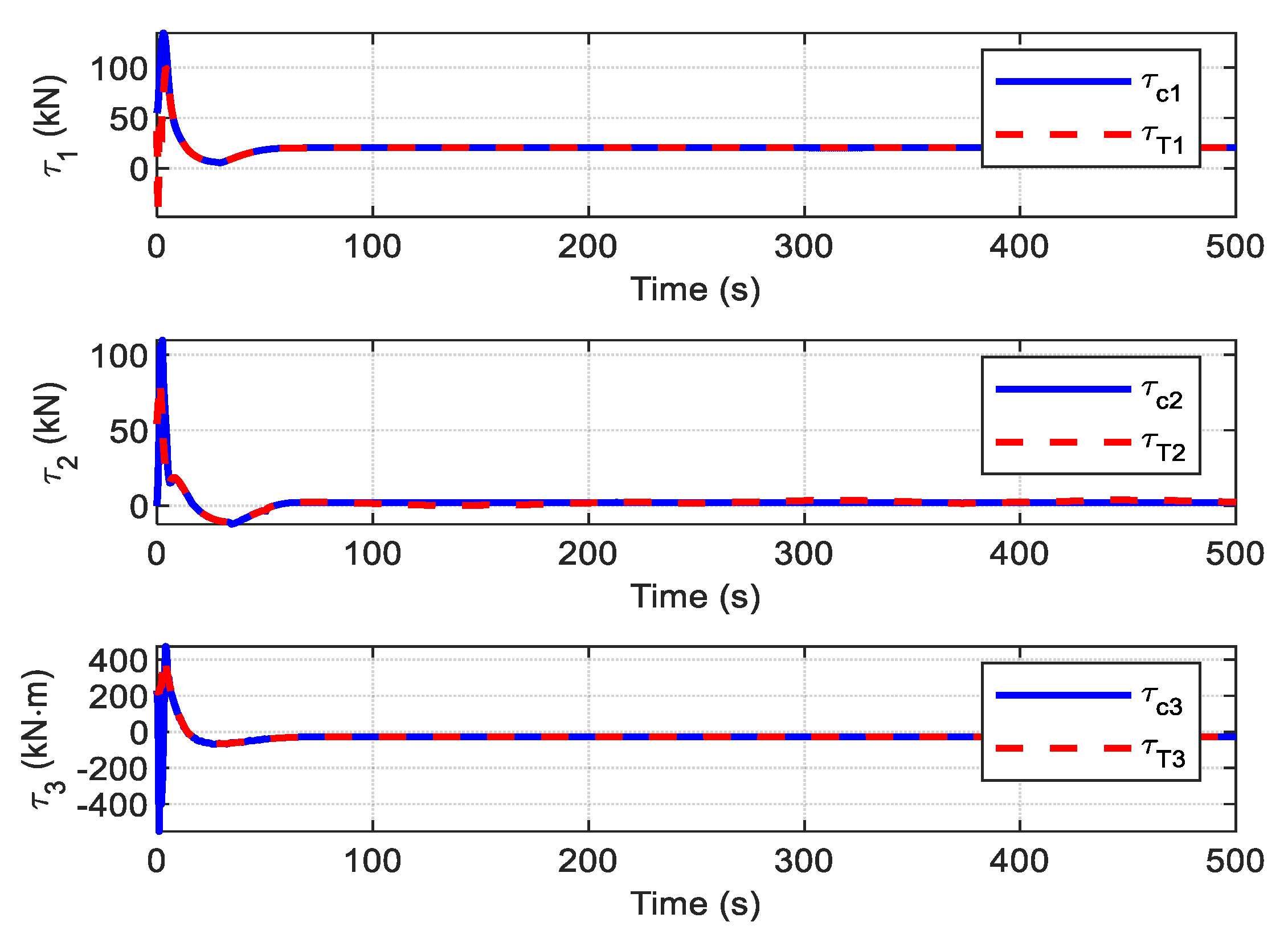
The command control law and the actual forces provided by the thrusters are shown in
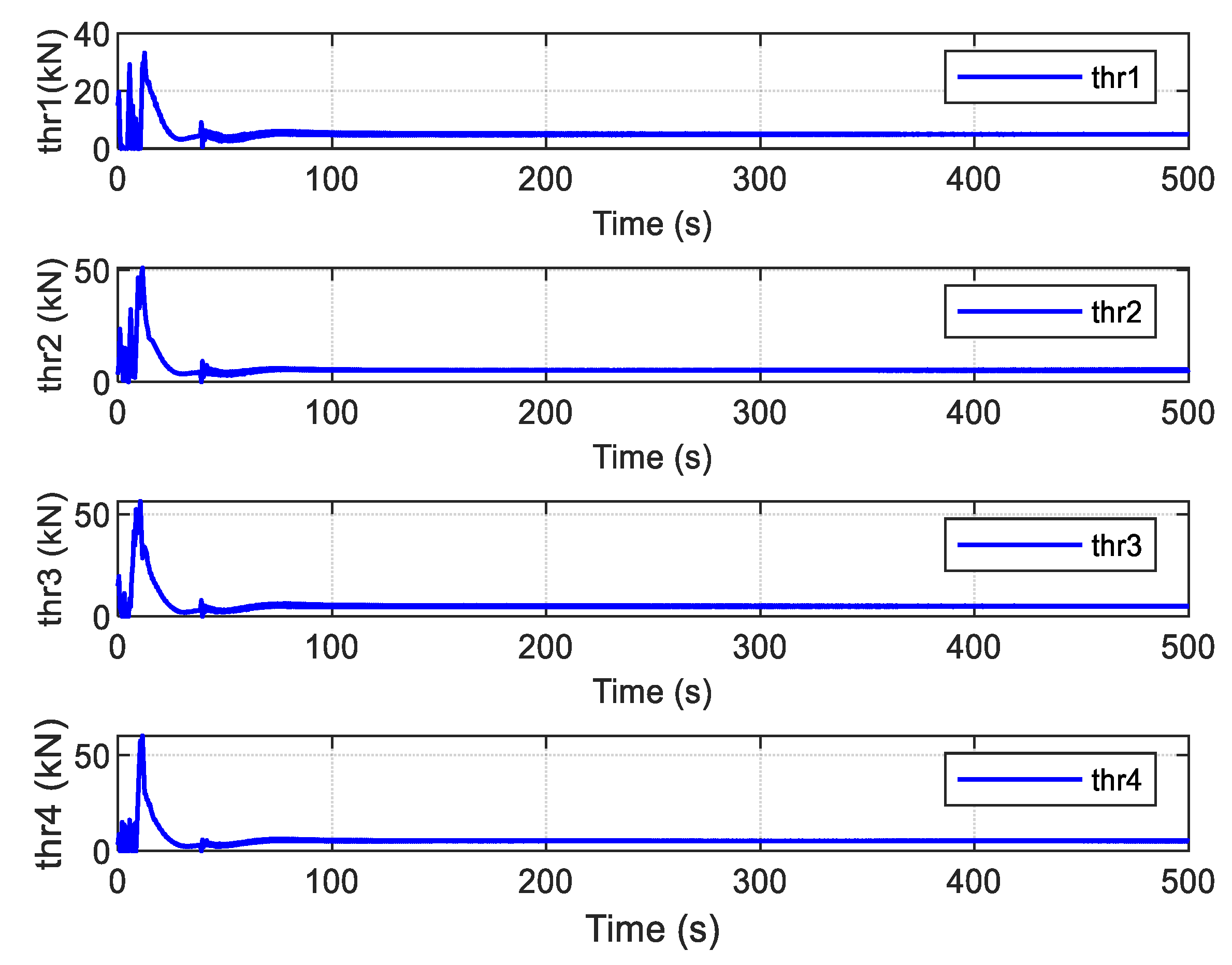
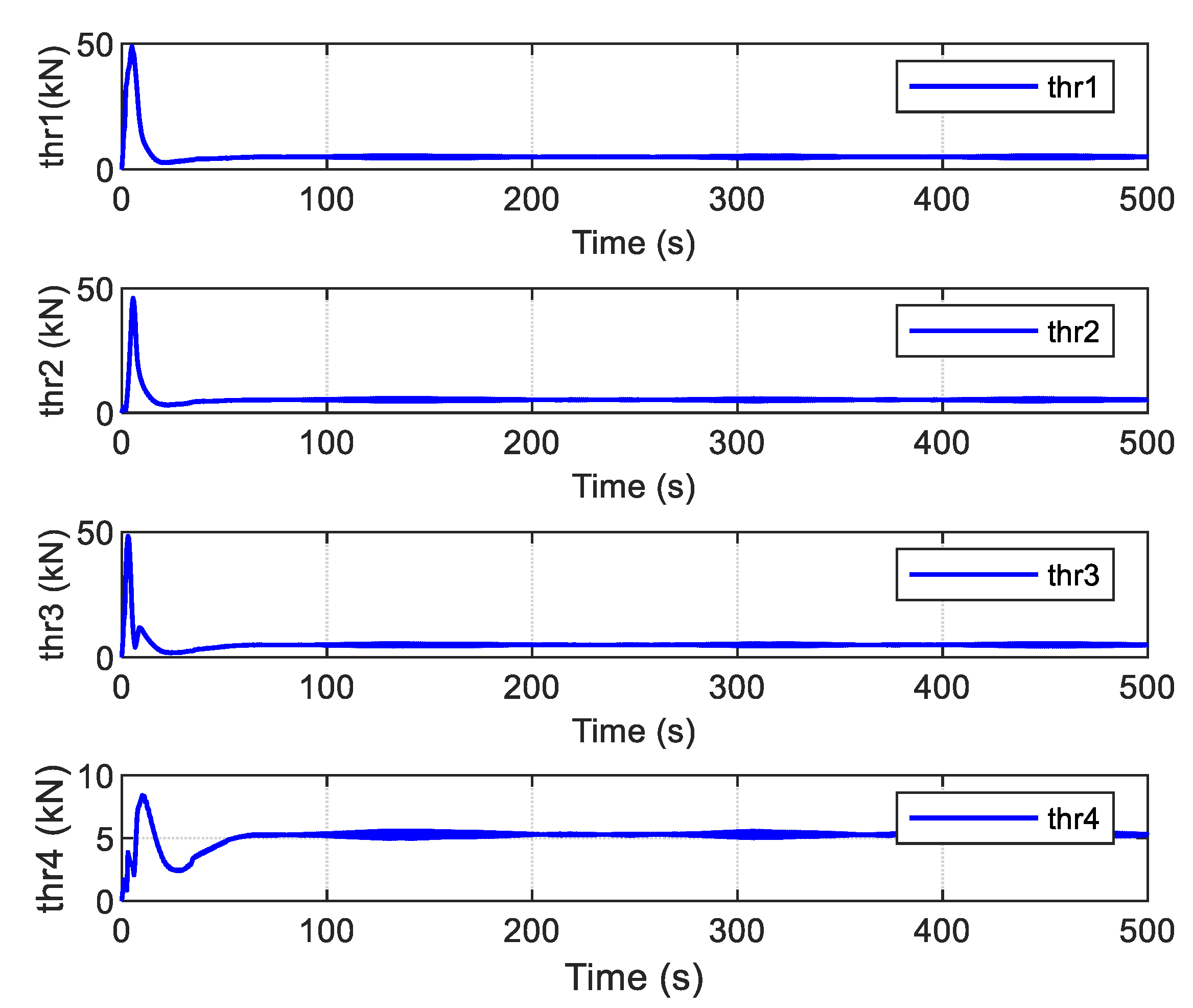
Figure 20. Compared with the FTC with ADO, it can be observed that the curves of the control law with the auxiliary term are much smoother in the initial stage and more easily executed by the thruster system. The forces of each thruster are given in
Figure 21, which shows that iterative compensation using the auxiliary dynamic system significantly modifies the control inputs and reduces the effect of actuator saturation.
In order to quantitatively evaluate the performance of the proposed FTC with ADO and ADS, the performance indices are summarized in
Table 3, where the performance indices
and
are used to evaluate the transient and steady-state performance of position errors, respectively.
is used to evaluate the response speed and fluctuation range of the control law. From
Table 3, it can be observed that the performance indices are much lower for the proposed control technique compared with the other method mentioned in Case 1; namely, FTC with ADO. Then, by comparing the simulation results, it can be concluded that the ADS is effective for handling the actuator constraints, and the performance of the proposed FTC with ADO and ADS is superior to that of the FTC with ADO.
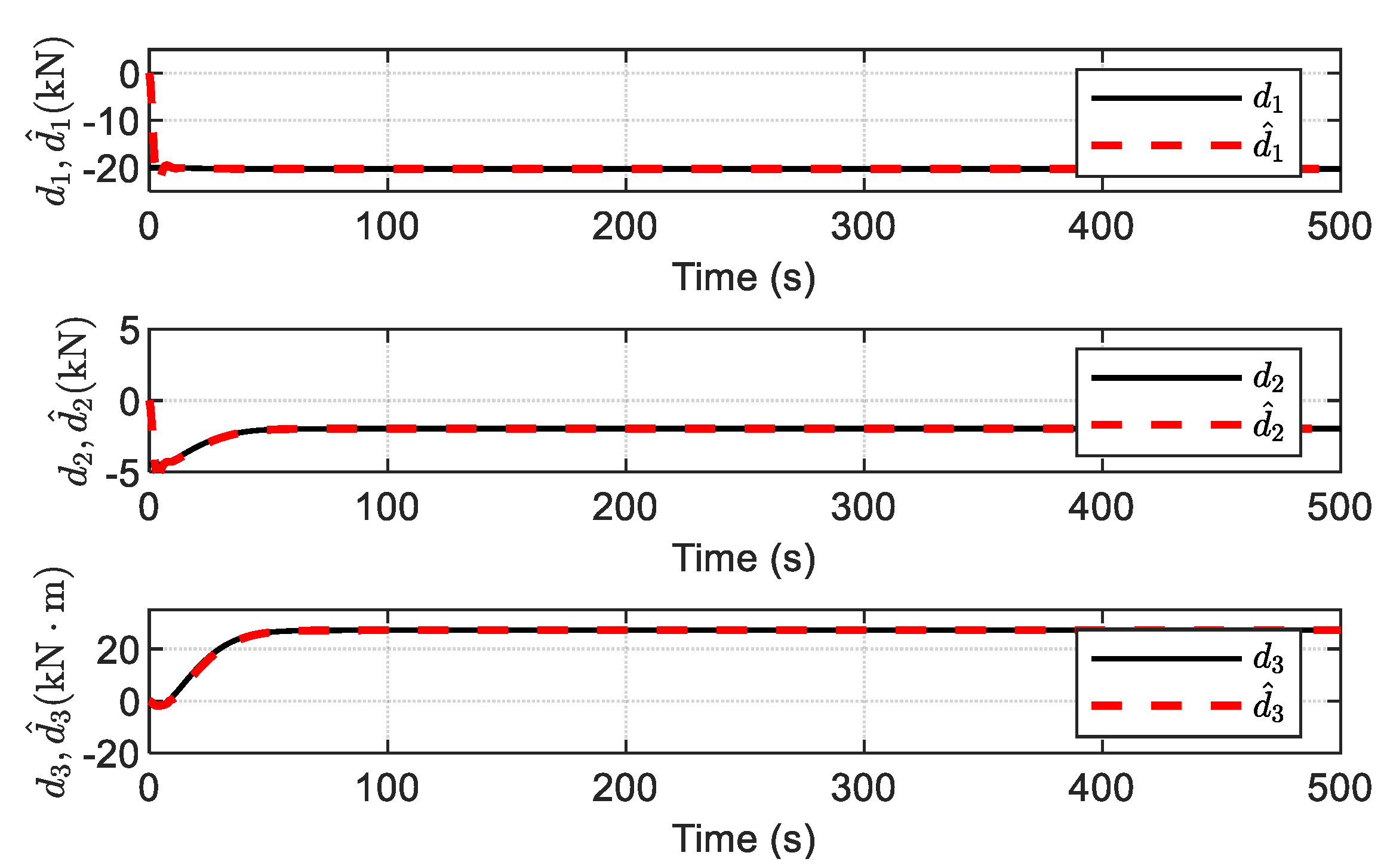
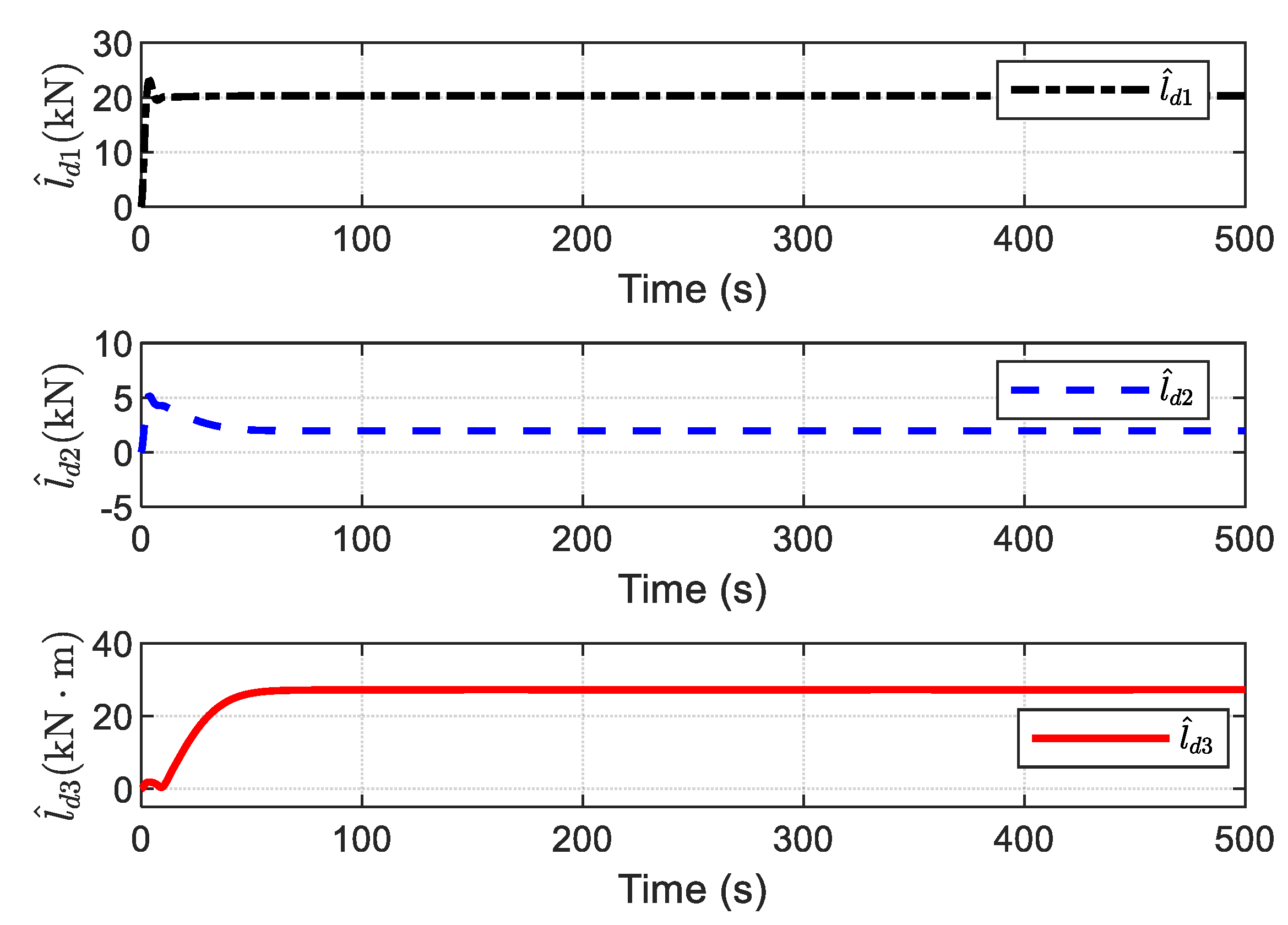
The estimation of disturbances, and the upper bound of the disturbances using the ADO, are given in
Figure 22 and
Figure 23, respectively. It is observed that the unknown varying-time disturbances can be accurately estimated by the ADO without readjusting its design parameters, and no prior information on the time-varying disturbances is required.
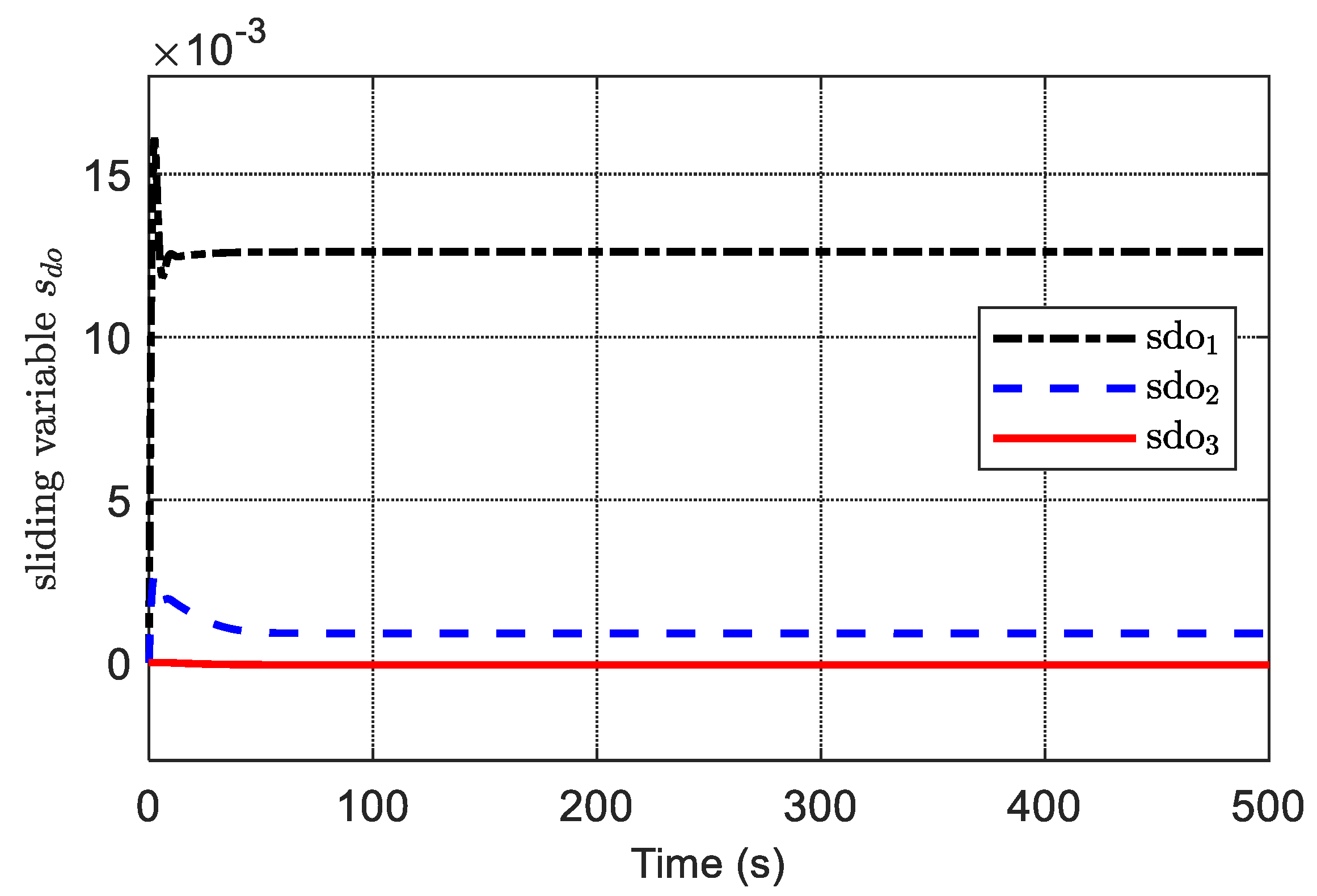
Furthermore, because the derivative of
is not strictly negative, the auxiliary sliding surface
of the ADO is bounded and converges into a region of origin, as is demonstrated in
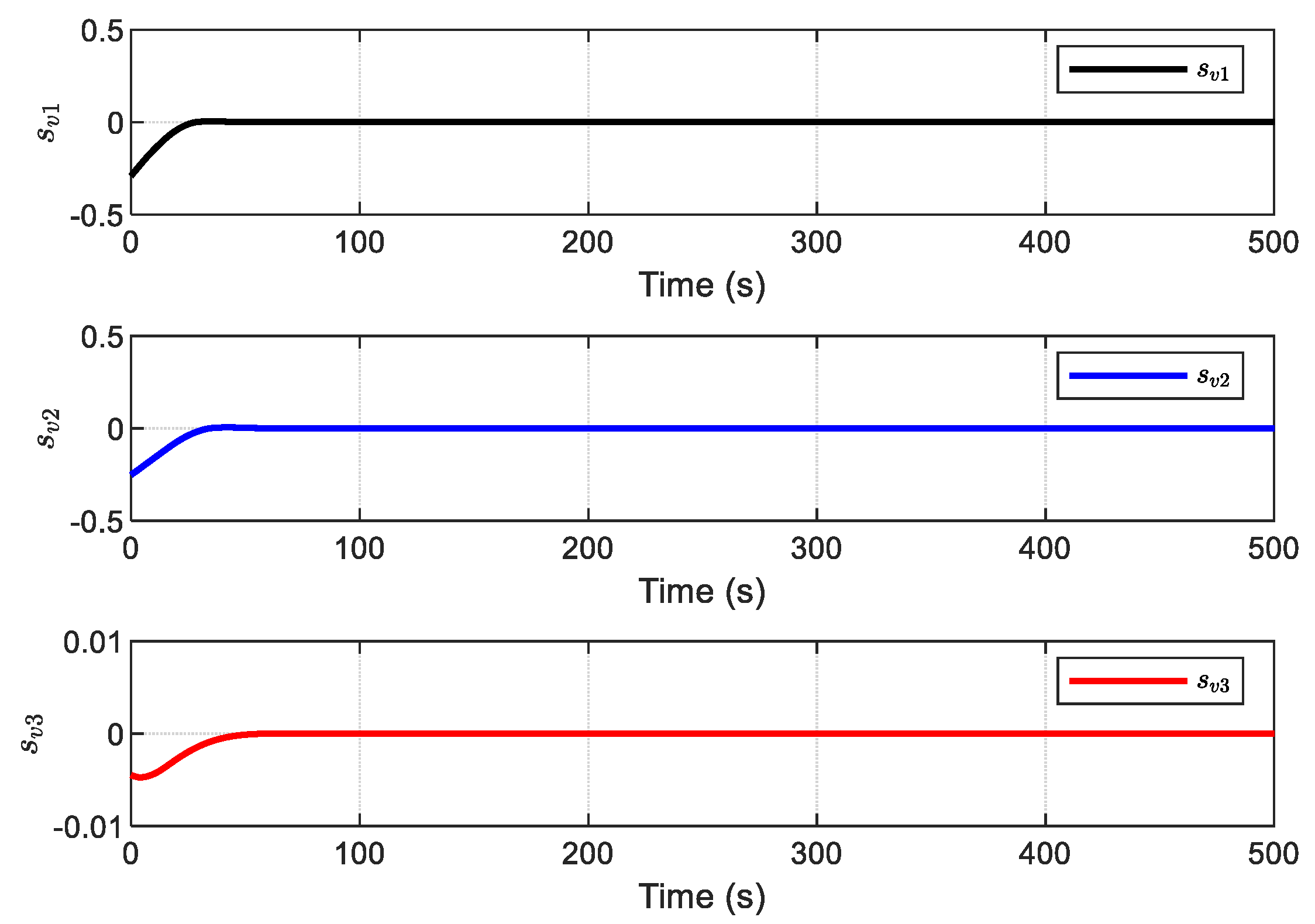
Figure 24. The sliding surface
is given in
Figure 25, and it is observed that the sliding surface converges to zero within about 50 s. This is because the exponential reaching law guarantees that the sliding surface is reachable at high speed.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}