Abstract
In this paper, the formation coordination control of discrete-time distributed leaderless multiple autonomous underwater vehicle (AUV) system with double independent position–velocity communication topology and control inputs on a nonconvex set is studied. Firstly, the problem of formation coordination control of multi-AUV system is transformed into the problem of formation consensus of multi-AUV system, and the consistent state of leaderless multi-AUV system formation was defined. Secondly, considering the existence of bounded communication delay and nonconvex control input constraints for multi-AUV system formation under weak communication conditions, a formation consistent constraint controller algorithm for discrete-time leaderless multi-AUV system with double independent communication topology is proposed by introducing constraint operators. By using the properties of graph theory, random matrix and SIA matrix, and selecting appropriate controller parameters, the multi-AUV system formation can reach the defined consensus state. Furthermore, the unbounded communication delay of multi-AUV system formation is studied. Finally, the simulation results show that the proposed controller constraint algorithm is effective.
1. Introduction
The multiple autonomous underwater vehicle (AUV) system is composed of multiple isomorphic or heterogeneous AUVs that are close to each other and can carry out information exchange and assistance. Compared with single AUV, multi-AUV system carrys different equipment, shares information, and coordinate to complete the set tasks, which can effectively increase the work scope of the task, reduce the working time, improve the work efficiency, and greatly reduce the possibility of the failure of the entire task due to the failure of single AUV [1,2]. However, the multi-AUV formation needs to design the corresponding assistance mechanism according to different task requirements to achieve the purpose of collaborative control. However, the dynamics characteristics of single AUV in the formation system, the interference of Marine environment and the interaction between different instructions are coupled. In addition, the coordination method among individuals in distributed multi-AUV system also brings many problems to the design of control system [3,4]. Therefore, the formation coordination problem of distributed multi-AUV system is studied in this paper.
Formation consensus of multi-AUV system means that multiple autonomous underwater vehicles reach a consensus on the value of information state through mutual negotiation among members in a certain network topology [5,6]. In the underwater survey task, the placement points of each member in the multi-AUV formation system are random and irregular, and the formation usually needs to be carried out according to the task requirements of the multi-AUV system [7,8]. This process is described and verified by the formation consensus problem of the multi-AUV system [9,10]. Therefore, in this paper, the problem of formation coordination control of multi-AUV system is transformed into the problem of formation consensus.
The multi-AUV system needs a lot of information interaction to realize the coordination and control among individuals during the execution of tasks. In underwater operation, the formation process of multi-AUV system mainly relies on underwater acoustic communication to coordinate the motion state of each member, to achieve fast and stable [11,12]. The limitations of acoustic wave bandwidth, frequency and distance in water limit the ability and timeliness of information exchange between the members of the multi-AUV formation. A large number of data packet loss and communication delay are difficult to ensure that AUV formation has an effective, complete and stable communication chain [13,14,15]. In addition, the limitations of the communication equipment carried by AUV and the interference of ocean noise on the underwater acoustic channel of AUV formation will lead to the distortion of the effective motion state information, and the AUV formation cannot converge due to the distortion of the state information. Therefore, weak communication conditions dominated by delay, data packet loss, communication interruption and ocean noise are inevitable problems in the field of AUV collaborative operation [16]. Therefore, the formation consensus problem of multi-AUV system with communication delay is analyzed in this paper.
When considering the formation consensus problem of multi-AUV systems, the position communication topology and velocity communication topology usually share the same communication topology [17,18]. In this case, if there is communication delay and communication packet loss, the position state and velocity state are affected simultaneously. Therefore, the double independent position–velocity communication topology is selected in this paper when considering the consensus of formation [19,20]. The so-called double independent position–velocity communication topology is to divide the motion state information transmitted among the members of the formation into pose state information and velocity state information, and the two parts of information are transmitted through the independent position communication topology and velocity communication topology, respectively. In this way, the influence of communication delay and packet loss between AUVs on formation consensus can be reduced, and the amount of single packet data in communication can be reduced [21].
In our previous work, a lot of research results have been obtained on formation consensus of multi-AUV system [22,23,24,25,26,27]. However, most of the research results are based on the system in an ideal environment, without considering that the system may be limited by various constraints [13,17]. Although the problem of nonconvex control constraints is studied in [27], it is limited to the consistency problem of multi-AUV system with velocity constraints in nonconvex sets, and the formation problem is not considered. In fact, due to various objective conditions, such as the constraints of different driving forces in different directions. The control input of multi-AUV formation system can not be arbitrarily large, and is usually limited to a set of constraints, which may be nonconvex [28,29]. The leader-follow coordination control problem of continuous-time multi-AUV formation with two independent topologies and time-varying delays has been studied in reference [22,23]. Although, in the leader following formation, the follower does not need to carry more self-positioning and navigation equipment, and can judge its corresponding state through the status information of the leader, the division of labor in the formation is too concentrated, and if the leader fails, the whole formation cannot work normally. According to different underwater task requirements and considering the state adjacency information of a single AUV, the formation of leaderless multi-AUV system is a kind of formation structure that can make corresponding actions that are beneficial to the overall movement trend [30,31]. Compared with the leader–follower formation, the above formation has the advantages of strong autonomy and high redundancy, and each AUV carries communication and positioning systems less related to the survey task, which reduces the overall survey payload of the formation of multi-AUV system.
Therefore, in view of the above problems, the formation consensus problem of discrete-time distributed leaderless multi-AUV system with double communication topology and nonconvex control constraints is studied in this paper. The specific contributions of this paper are as follows.
- 1.
- The problem of formation coordination control of multi-AUV system is transformed into the problem of formation consensus of multi-AUV system, and the definition of formation consensus of leaderless multi-AUV system was given;
- 2.
- Under the condition that the communication delay of multi-AUV system formation with nonconvex control input constraints is bounded, a consensus constraint controller algorithm for discrete-time leaderless multi-AUV system formation with double independent position–velocity communication topology is proposed;
- 3.
- Combining the properties of the graph theory, random matrix and SIA matrix, it is proved that the formation of multi-AUV system can achieve the defined consensus objective by selecting the appropriate controller parameters and communication topology. On this basis, the unbounded communication delay of multi-AUV system formation is further studied.
The rest of this paper is arranged as follows. In Section 2, the notations, definitions, lemmas and model of multi-AUV system are introduced. In Section 3, the formation consensus of the leaderless multi-AUV system is discussed. In Section 3.1, the discrete time constrained controller algorithm under the condition of bounded communication delay is proposed, and in Section 3.2, it is extended to the case of unbounded communication delay. In Section 4, the conclusions of this paper are verified by simulation experiment. In Section 5, the conclusion and future work are drawn.
2. Preliminaries
2.1. Notations
The set of m dimensional real column vectors is represented as , the set of real matrices is represented as , the transpose of a vector and matrix are represented as and , the ith entry of the vector is represented as , the th entry of the matrix is represented as , the Euclidean norm of the vector is represented as , and the Kronecker product is represented as ⊗. The m dimensional unit matrix is represented as , the column vector with all 1 is represented as , the null vector and the null matrix are represented as and , respectively. The block diagonal matrix is represented as , the product of the matrices is represented as , and the sum is denoted by the symbol .
2.2. The Model of Multi-AUV System
In our previous work, the linearization process of symmetric AUV with 6 degrees of freedom has been considered, which will not be repeated in this paper. The system state of AUV is expressed as , then the linear model of AUV in multi-AUV formation system directly given as follows
where , , and represent the position state, speed state and control input of AUV, , respectively [22].
The formation of multi-AUV system usually adopts fixed formation in underwater tasks, and the relative position of each member has been fixed in the preset formation, including distance and angle. Then, there must be a relatively fixed reference point for the fixed formation, and let the vector denote the expected position of the AUV relative to in the three-dimensional space. In this paper, for the formation of the leaderless multi-AUV system, the relative fixed reference point of the formation is set to coincide with the vector reference point formed by the average state of each AUV during the transition from the disorder state to the fixed formation, as shown in Figure 1.
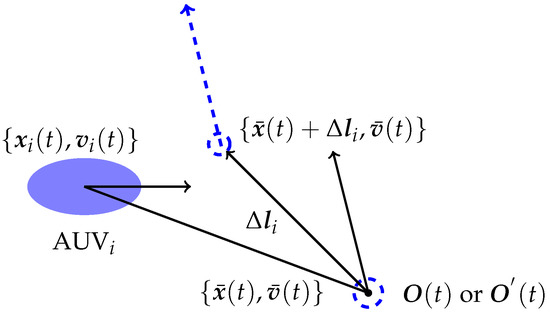
Figure 1.
The example of leaderless formation.
In the formation process, since the position state and velocity state of each AUV continue to change, the reference point always keeps moving. In addition, because the expected point of each AUV is fixed with respect to , it can be judged that if AUV can converge to , it must also converge to , where , . Then, the formation consensus of leaderless multi-AUV system is defined as follows.
Definition 1.
In the formation of leaderless multi-AUV system composed of n AUVs, the position state vector and velocity state vector of AUV at time t are and , respectively. If the formation satisfies the following formulas, it is said that the formation of leaderless multi-AUV system can achieve consensus and continuously ensure formation convergence and stability.
Let
according to the linearized model (1) and (2), the discrete-time model of AUV can be obtained as follows
where , , are the position state, speed state, control input of the ith AUV at time , T is the control period, k stands for the discrete-time index, In addition, satisfies the nonconvex constraint, that is, for any , is constrained on the non-empty nonconvex set . Therefore, the following assumptions are given regarding the set .
Assumption 1
([32]). For the non-empty bounded closed set , such that , there exist positive constants , , such that and . Here, the operator is defined by
The purpose of Assumption 1 is to find the largest vector in the set U that has the same direction as , as shown in Figure 2, where denotes any vector in the five-dimensional space.
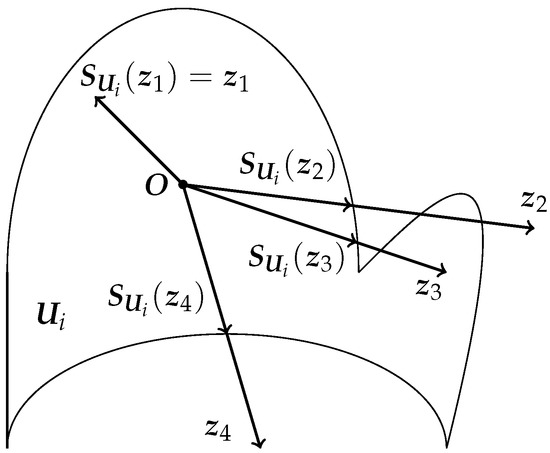
Figure 2.
The example of the operator .
Through the above transformation (5) and (6), the coordination formation control problem shown in (3) and (4) can be equivalent to the consensus control problem with respect to and .
Define
then the coordination control objective of leaderless multi-AUV system formation to achieve consensus can be equivalently expressed as follows
Since this paper discusses the coordination control problem of formation under weak communication condition, that is, there is communication delay in formation process, let represent the communication delay between AUV and AUV at time , then the following definition is given about .
Definition 2.
In the discrete-time multi-AUV system, is the communication delay between AUV and AUV.
- 1.
- For any , if there exists a constant such that , then the multi-AUV system is said to be no communication delayed.
- 2.
- For any , if there exists a positive integer N such that , then the multi-AUV system is said to be communication delay bounded. In this case, is valued as followswhere is a non-negative integer, and satisfies , , and .
- 3.
- If there is , for any positive integer N, , then the multi-AUV system is said to be communication delay unbounded.
Compared with bounded communication delay, if is the unbounded communication delay, then AUV in the formation cannot receive the information transmitted by AUV at time , which will greatly affect the integrity of the formation and the accuracy of the position/velocity. With respect to Definition 2, for all , when , no communication delay can be regarded as a special case of bounded communication delay. Therefore, only two cases of bounded communication delay and unbounded communication delay are considered in this paper.
2.3. Graph Theory and Lemmas
Let be the digraph of the multi-AUV formation system with n members, where is the set of nodes, is the set of edges and is the adjacency matrix associated with the digraph, and . The Laplace matrix is defined as . The edge in the edge set of a digraph indicates that node j can receive the information of node i, where the node i is called the parent node and the node j is called the child node, if then , otherwise . Let represents the set of neighbors of node i. The combination of edges is called a directed path. The digraph is known as the directed tree if all nodes but one root node have a parent node and there is a directed path at the root to connect all other nodes. The digraph is strongly connected if there is a directed path between any two different nodes in the digraph. The union of a set of graphs is a graph composed of the union of nodes of graphs and the union of edge sets. A union of graphs is defined as a graph consisting of the union of nodes and the union of edge sets of these graphs.
For a nonnegative matrix , if , then is a random matrix. Furthermore, for a random matrix , if there is and only one eigenvalue satisfying and other eigenvalues satisfying , then random matrix is a SIA matrix.
Lemma 1
([33]). For the random matrix , if its diagonal elements are positive and the graph associated with has a spanning trees, the is a SIA matrix.
Lemma 2
([34]). For a finite SIA matrix set , the product matrix of any finite matrix matrix is also a SIA matrix, for an infinite number of matrices , then there exists a constant vector that satisfies .
Lemma 3
([35]). For nonnegative matrices , assuming that its diagonal elements are all positive, then there exists satisfying . If the graph associated with the matrix contains a spanning tree, then the graph associated with the matrix also contains a spanning tree.
3. Results
3.1. Formation Constrained Controller with Bounded Communication Delay
Let be the double independent position–velocity communication topology of formation, and be different communication delays and satisfy the delay bounded condition of Definition 2, namely, there are positive integers and , so that , . Then, the discrete-time constrained coordination controller of the leaderless multi-AUV system formation with double communication topology and the control input satisfying the nonconvex control constraints is given as follows
where and are the th element of position adjacency matrix and velocity adjacency matrix , respectively, and and are the gain of the coordination controller at time .
According to Assumption 1, (13) is nonlinear. Therefore, (13) will be linearized in the following. Define
where
Since and have the same direction, (13) can be written as
and for all , .
Now , , are transformed. Let
then the discrete-time multi-AUV system (7) and (8) with the constrained coordination controller (13) can be expressed as
where . Let , then m satisfies the inequality . Let be Laplace matrix with respect to communication topologies and , then , . , . When , the th entries of matrices and are the weights and of edges , respectively; otherwise, the th entries of and are zero. For matrices and , the th entry of and is if , the th entry is zero otherwise.
Further are transformed. Let
then
where , its specific representation is as follows.
Each block matrix in matrix can be, respectively, expressed as
where q is a positive integer, and . The other matrix blocks are 2n × 2n-order null matrices.
According to the above procedure, the consistency theorem for discrete-time multi-AUV formation system with nonconvex control inputs and double independent position–velocity communication topology is given below.
Theorem 1.
When the related parameters and communication topology meet the following conditions:
- 1.
- The position communication topology and speed communication topology have directed trees, respectively.
- 2.
- For all , , , where , , .
- 3.
- .
Proof of Theorem 1.
First, the random matrix is constructed. Let
where , , , , and the other matrix blocks are 2n × 2n-order null matrices. According to the conditions (2) and (3) given by Theorem 1 and the properties of random matrices, we know that is a random matrix.
When , the expansion of consists of these two forms and . Where is the matrix composed of infinite matrices , is the matrix composed of infinite matrices , , , , are matrices composed of finite matrices and , respectively, and . Furthermore, according to the conditions given by Theorem 1, it can be known that the communication topology associated with random matrix has a directed tree. Then, according to the definitions of random matrix and SIA matrix Lemma 1, is a SIA matrix. Thus, When , the matrix has the same row vectors.
Next, define
where , and the matrices each have the same row vectors, . Through matrix operation, the matrix can be obtained in the following form,
and for all , the matrix is the n-order matrix with the same row vectors. On the other hand, for the matrix , taking the infinite norm of , we can obtain the following inequality
where are nonnegative integers and .Therefore, it can be seen from (26) that
If the formation of the multi-AUV systems can achieve the consensus in Theorem 1, then it shows that the vectors and are bounded for all Therefore, the following assumption is given.
Assumption 2.
When the formation of multi-AUV systems can achieve the consensus in Theorem 1, assume that there are non-negative constants , which satisfy
for all .
In fact, in the process of formation tend to be more consistent, the coordinated control system of formation, the initial state of each unit in the formation, the controller gain, control period and communication topology are given in advance according to the conditions in Theorem 1, then vector and vector can be easily solved. At this time, the non-negative constant and can be found to make and . Therefore, Assumption 2 is easy to realize.
Corollary 1.
When the formation of multi-AUV systems can achieve the consensus in Theorem 1, for all , satisfies
where and .
Proof of Corollary 1.
By the definition of , for all when , , . Below from the numerator, denominator two aspects to discuss. Firstly, according to the assumption of constraint operator in Assumption 1, it can be known that . Secondly, according to the conditions in Theorem 1,
So for all ,
Corollary 1 is proved. □
In Theorem 1, Condition 1 states that if a formation can maintain the existence of a directed tree in its communication topology in the case of bounded communication delay and random communication delay, the preset communication topology of the formation is required to be relatively high. In general, when the multi-AUV formation system has communication delay, the communication topology cannot be guaranteed to have a directed tree. In view of this situation, another corollary about Theorem 1 is given below.
Corollary 2.
For the leaderless multi-AUV formation system (7) and (8) with bounded communication delay, the discrete-time constrained controller algorithm (13) is selected when the following conditions are satisfied
- 1.
- The union of position communication topologies the union of velocity communication topologies have directed trees, respectively,
- 2.
- For all , , , where , , .
- 3.
- .
the multi-AUV formation can achieve the set consensus state, and , .
Proof of Corollary 2.
Definition
According to the conditions of Theorem 1, It can be known that the communication topological directed spanning tree related to matrices . According to the proof process of Theorem 1, matrix is a random matrix, then according to Lemma 3, there exists , which satisfies
and the product matrix contains a directed spanning tree, so is a SIA matrix.
for any non-negative integer , there is
where . When , the expansion of the product matrix also consists of two forms of matrices and . Where matrix is the matrix composed of the product of infinite matrices, matrix is the matrix composed of the product of infinite matrices, and , , , and are product matrices composed of finite and matrices.
The proof of Theorem 1 shows that the product matrix . Therefore, only matrices of form are considered in the following. The product matrix can be expressed as
where the matrix is the matrix obtained by multiplying infinitely many matrices. According to the properties of SIA matrix, the product matrix has the same row vectors. Therefore, the product matrix has the same row vectors for every n rows. That is, when , the product matrix has the same row vector for every n rows. So for any , when , there is
Corollary 2 is proved. □
3.2. Formation Constrained Controller with Unbounded Communication Delay
Under the condition of weak communication, the multi-AUV formation system may have unbounded communication delay, that is, there exists , for any positive integer N, it satisfies , , that is to say, AUV in the formation cannot receive the information transmitted by AUV at time . For this case, its corresponding weight values are selected as and . Therefore, the communication topology , , associated with are not guaranteed to contain a spanning tree.
According to the definition of communication delay, assuming that and , satisfy the success of communication according to the probability and , respectively, there are positive integers , such that
If is chosen as a value very close to 1, then it can be assumed, for times communication between systems, at least one can be successful. Therefore, for the case of unbounded communication delay in Definition 2, is selected. In this case, the consensus problem of multi-AUV formation system with unbounded communication delay is transformed into the consensus problem of formation with bounded communication delay. Therefore, the following theorem is given for multi-AUV formation systems with unbounded communication delay.
Theorem 2.
For the leaderless multi-AUV formation system (7) and (8) with unbounded communication delay, the discrete-time constrained controller algorithm (13) is selected when the following conditions are satisfied
- 1.
- The union of position communication topologies the union of velocity communication topologies have directed trees, respectively,
- 2.
- For all , , , where , ,
- 3.
- .
the multi-AUV formation can achieve the set consensus state, and , .
The proof of Theorem 2 is the same as that of Corollary 2, so the explanation is not repeated.
In Theorem 2, the formation is only considered in the case of no communication delay and unbounded communication delay. However, in general, the formation may have no communication delay, bounded communication delay and unbounded communication delay during operation, and it is impossible to uniformly determine the communication delay bound in practice. At the same time, when the bounded communication delay is too large, the validity of the obtained data is too low. Therefore, in practical applications, a non-negative constant integer is usually selected to determine the bounded or unbounded communication delay. Therefore, the following assumption is given regarding the communication delay and .
Assumption 3.
For any , a non-negative constant integer is selected. Suppose that
- 1.
- when , are called the bounded communication delay of the multi-AUV formation system,
- 2.
- when , are called the unbounded communication delay of the multi-AUV formation system.
Suppose meet the requirements of successful communication, bounded communication delay and unbounded communication delay according to probability , and , respectively. Then, for any , there exist positive integers such that
and , . If is taken to be a value very close to 1, it can be assumed that, for the case of unbounded communication delay in Assumption 2, the formation can succeed in at least one of communications. Therefore, according to Assumption 3, the following corollary can be obtained.
Corollary 3.
For the leaderless multi-AUV formation system (7) and (8) with communication delay, the discrete-time constrained controller algorithm (13) is selected when the following conditions are satisfied
- 1.
- The union of position communication topologies the union of velocity communication topologies have directed trees, respectively,
- 2.
- For all , , , where , , .
- 3.
- .
the multi-AUV formation can achieve the set consensus state, and ,
Proof of Corollary 3.
For all , meet Assumption 3, then the values of are selected as follows
At this time, the consensus problem of multi-AUV formation systems satisfying Assumption 3 is transformed into the consensus problem of formation systems with bounded communication delay. Therefore, the following proof procedure is the same as Corollary 2. □
4. Simulation
In this part, the above conclusions are mainly verified by simulation. Assume that the multi-AUV formation system consists of five AUVs, which are AUV, AUV, AUV, AUV and AUV, respectively. The position communication topology and velocity communication topology are selected as the communication structures shown in Figure 3. For the adjacency matrix and of and , when , ,, . The nonconvex control constraint set is selected as , . In this case, . The initial states are selected as , , , , , and . The control period and controller parameters are selected as , and . The relative expected positions are selected as , , , and . According to Assumption 3, the value of is random and is chosen as in this part. According to (31) and (32), the value of should be close to 1, so is selected. The values of , and are random, then when , . Further, suppose that when , , , when , , , , when , , , , , when , , , , , , where , respectively, represent the probability of , represents the probability of , at this point, . In this part, represents the ith component of , . Then the simulation structure of multi-AUV formation system (7) and (8) with constraint controller (13) under the condition of communication delay is shown in Figure 4, Figure 5, Figure 6, Figure 7 and Figure 8.
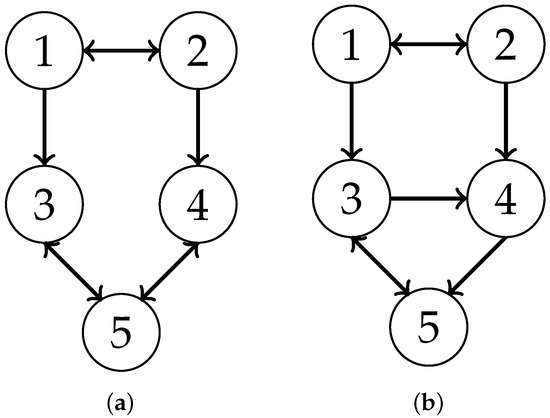
Figure 3.
The double independent position–velocity communication graph: (a) the position communication graph, (b) the velocity communication graph.
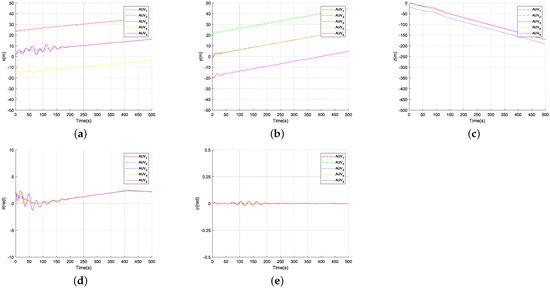
Figure 4.
The position state of the multi–AUV formation: (a) the x state of multi–AUV, (b) the y state of multi–AUV, (c) the z state of multi–AUV, (d) the state of multi–AUV, (e) the state of multi–AUV.
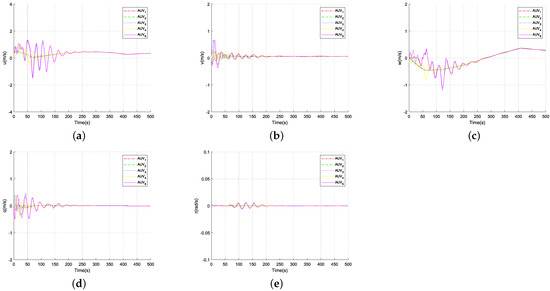
Figure 5.
The other states of the multi–AUV formation: (a) the u state of multi–AUV, (b) the v state of multi–AUV, (c) the w state of multi–AUV, (d) the q state of multi–AUV, (e) the r state of multi–AUV.
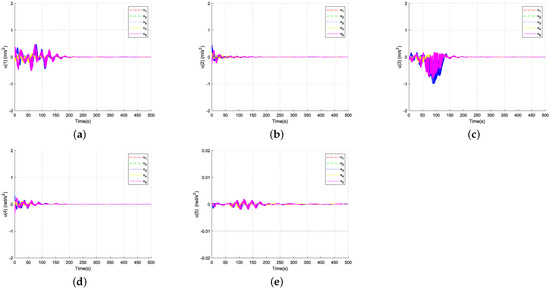
Figure 6.
The control input of the multi–AUV formation: (a) the state of multi–AUV, (b) the state of multi–AUV, (c) the state of multi–AUV, (d) the state of multi–AUV, (e) the state of multi–AUV.
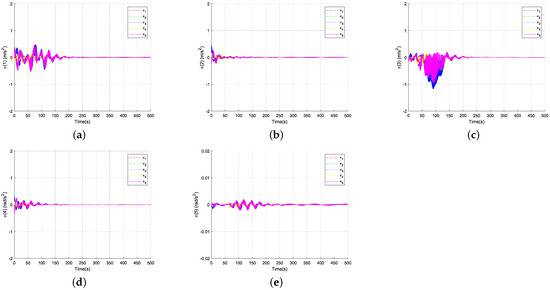
Figure 7.
The state of the multi–AUV formation: (a) the state of multi–AUV, (b) the state of multi–AUV, (c) the state of multi–AUV, (d) the state of multi–AUV, (e) the state of multi–AUV.
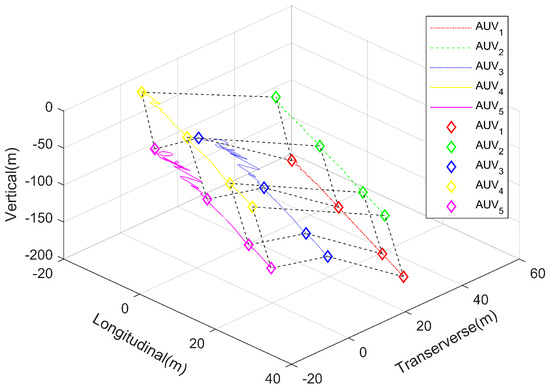
Figure 8.
The 3D trajectory of the multi–AUV formation.
It can be seen from Figure 4 and Figure 5 that the relevant states of the multi-AUV system can reach a consistent state after a period of adjustment. By comparing Figure 6 and Figure 7, the control inputs of the multi-AUV system formation can be controlled to meet the set nonconvex constraints. From Figure 9, it can be seen that the multi-AUV system can form a fixed formation after a period of adjustment and maintain the stability of the formation.
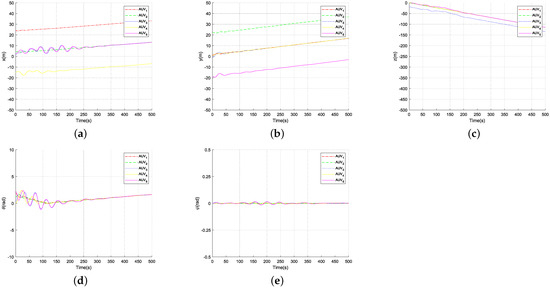
Figure 9.
The position state of the multi–AUV formation: (a) the x state of multi–AUV, (b) the y state of multi–AUV, (c) the z state of multi–AUV, (d) the state of multi–AUV, (e) the state of multi–AUV.
In order to compare with the traditional communication topology, the communication topology is selected for the multi-AUV formation system, as shown in Figure 3a. At this time, if communication delay exists, then both position information and velocity information have communication delay, that is, , where represents the communication delay from AUV to AUV at . When other values are consistent with the above double communication topology, is selected according to the above values of , then the simulation results of the formation are shown in Figure 9, Figure 10, Figure 11, Figure 12 and Figure 13.
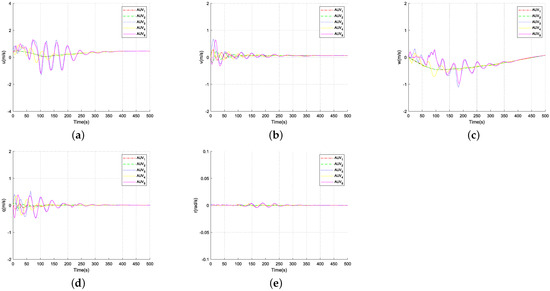
Figure 10.
The other states of the multi–AUV formation: (a) the u state of multi–AUV, (b) the v state of multi–AUV, (c) the w state of multi–AUV, (d) the q state of multi–AUV, (e) the r state of multi–AUV.
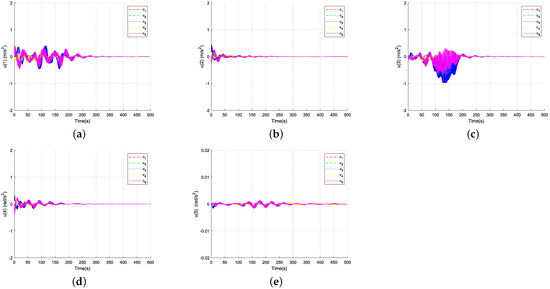
Figure 11.
The control input of the multi–AUV formation: (a) the state of multi–AUV, (b) the state of multi–AUV, (c) the state of multi–AUV, (d)The state of multi–AUV, (e) the state of multi–AUV.
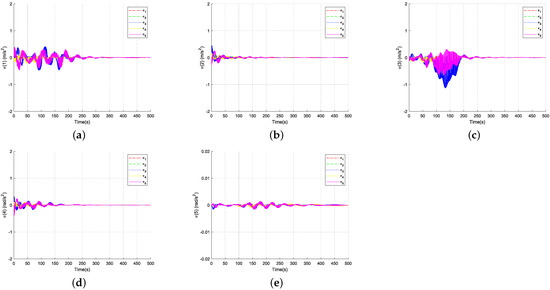
Figure 12.
The state of the multi–AUV formation: (a) the state of multi–AUV, (b) the state of multi–AUV, (c) the state of multi–AUV, (d) the state of multi–AUV, (e) the state of multi–AUV.
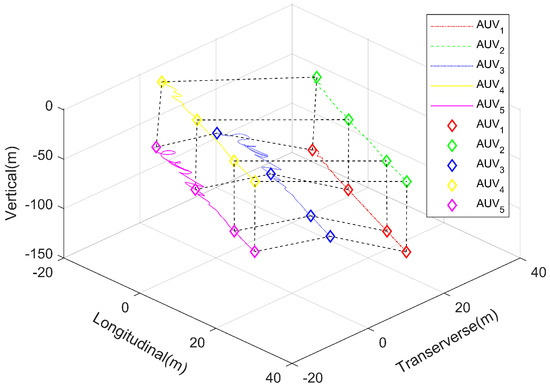
Figure 13.
The 3D trajectory of the multi–AUV formation.
From Figures 9–13, it can be seen that in the case of traditional communication topology, the constraint controller proposed in this paper can also realize the consensus of the formation of multi-AUV system when the relevant parameters and communication topology meet certain conditions. However, compared with the simulation results of the double independent position–velocity communication topology in Figures 4–8, it can be seen that the multi-AUV formation with the double communication topology has less influence, faster convergence speed and shorter convergence time under the condition of communication delay.
5. Conclusions
In this paper, the problem of formation coordinated control of discrete time leaderless multi-AUV system with double communication topology and nonconvex control input constraints is studied. First, the consensus state of the leaderless formation is constructed. Secondly, a constraint controller with bounded communication delay is proposed by introducing the constraint operator, which solves the problem of coordinated control of leaderless multi-AUV system formation nonconvex control input constraints. By using the related properties of graph theory and SIA matrix, selecting the appropriate parameters and communication topology, the formation of multi-AUV system can achieve the set consensus goal. On this basis, the cooperative control problem of multi-AUV system with unbounded communication delay is further extended to solve the problem of multi-AUV systems with control input constraint in nonconvex sets under weak communication conditions. Finally, the effectiveness of the proposed controller is verified by the simulation results, and the multi-AUV system can achieve the consensus of the formation and keep the formation unchanged. However, the disturbance of underwater environment to formation is not considered in this paper. In fact, there may be obstacles when the formation approaches a given consistency target, so this part should be considered in future research.
Author Contributions
Conceptualization, methodology, software, resources, investigation, data curation, writing—original draft preparation, writing—review and editing, validation, L.Y.; software, validation, C.Z.; formal analysis, validation, X.P.; writing—review and editing, validation, J.Z.; supervision, validation, project administration, funding acquisition, Z.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This work was partially supported by the National Nature Science Foundation of China under grant No.52071102.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yang, Y.; Xiao, Y.; Li, T. A survey of autonomous underwater vehicle formation: Performance, formation control, and communication capability. IEEE Commun. Surv. Tutor. 2021, 23, 815–841. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, C.; Zhang, M.; Yan, J.; Tian, W. Distributed event-triggered formation control for multi-AUV system via asynchronous periodic sampling control approach. Ocean Eng. 2022, 256, 111561. [Google Scholar] [CrossRef]
- Wang, C.; Cai, W.; Lu, J.; Ding, X.; Yang, J. Design, Modeling, Control, and Experiments for Multiple AUVs Formation. IEEE Trans. Autom. Sci. Eng. 2021, 19, 2776–2787. [Google Scholar] [CrossRef]
- Gao, Z.; Guo, G. Fixed-time sliding mode formation control of AUVs based on a disturbance observer. IEEE/CAA J. Autom. Sin. 2020, 7, 539–545. [Google Scholar] [CrossRef]
- Yan, T.; Xu, Z.; Yang, S.X. Consensus Formation Control for Multiple AUVSystems Using Distributed Bioinspired Sliding Mode Control. IEEE Trans. Intell. Veh. 2022, 1. [Google Scholar] [CrossRef]
- Fang, Z.; Jiang, D.; Huang, J.; Cheng, C.; Sha, Q.; He, B.; Li, G. Autonomous underwater vehicle formation control and obstacle avoidance using multi-agent generative adversarial imitation learning. Ocean Eng. 2022, 262, 112182. [Google Scholar] [CrossRef]
- Wu, X.; Gao, Z.; Yuan, S.; Hu, Q.; Dang, Z. A Dynamic Task Allocation Algorithm for Heterogeneous UUV Swarms. Sensors 2022, 22, 2122. [Google Scholar] [CrossRef]
- Xia, G.; Zhang, Y.; Zhang, W.; Chen, X.; Yang, H. Dual closed-loop robust adaptive fast integral terminal sliding mode formation finite-time control for multi-underactuated AUV system in three dimensional space. Ocean Eng. 2021, 233, 108903. [Google Scholar] [CrossRef]
- Yang, H.; Wang, Y. Formation optimization and control for maneuvering target tracking by mobile sensing agents. IEEE Access 2019, 7, 32305–32314. [Google Scholar] [CrossRef]
- Xia, G.; Zhang, Y.; Zhang, W.; Zhang, K.; Yang, H. Robust adaptive super-twisting sliding mode formation controller for homing of multi-underactuated AUV recovery system with uncertainties. ISA Trans. 2022, 130, 136–151. [Google Scholar] [CrossRef]
- Hadi, B.; Khosravi, A.; Sarhadi, P. A review of the path planning and formation control for multiple autonomous underwater vehicles. J. Intell. Robot. Syst. 2021, 101, 67. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Y.; Li, W. Formation Control of a Multi-Autonomous Underwater Vehicle Event-Triggered Mechanism Based on the Hungarian Algorithm. Machines 2021, 10, 346. [Google Scholar] [CrossRef]
- Du, J.; Li, J.; Lewis, F.L. Distributed 3D Time-Varying Formation Control of Underactuated AUVs With Communication Delays Based on Data-Driven State Predictor. IEEE Trans. Ind. Inform. 2022, 31, 6272–6287. [Google Scholar] [CrossRef]
- Zhao, Z.; Hu, Q.; Feng, H.; Feng, X.; Su, W. A Cooperative Hunting Method for Multi-AUV Swarm in Underwater Weak Information Environment with Obstacles. J. Mar. Sci. Eng. 2022, 9, 1266. [Google Scholar] [CrossRef]
- Li, L.; Li, Y.; Zhang, Y.; Xu, G.; Zeng, J.; Feng, X. Formation Control of Multiple Autonomous Underwater Vehicles under Communication Delay, Packet Discreteness and Dropout. J. Mar. Sci. Eng. 2022, 10, 920. [Google Scholar] [CrossRef]
- Xin, B.; Zhang, J.; Chen, J.; Wang, Q.; Qu, Y. Overview of research on transformation of multi-AUV formations. Complex Syst. Model. Simul. 2021, 1, 1–14. [Google Scholar] [CrossRef]
- Qi, X.; Cai, Z. Three-dimensional formation control based on nonlinear small gain method for multiple underactuated underwater vehicles. Ocean Eng. 2018, 151, 105–114. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, J.; Tang, J. Path planning for autonomous underwater vehicle based on an enhanced water wave optimization algorithm. Math. Comput. Simul. 2021, 181, 192–241. [Google Scholar] [CrossRef]
- Yan, Z.; Liu, Y.; Yu, C.; Zhou, J. Leader-following coordination of multiple UUVs formation under two independent topologies and time-varying delays. J. Cent. South Univ. 2017, 24, 382–393. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, M.; Zhang, C.; Zeng, J. Decentralized formation trajectory tracking control of multi-AUV system with actuator saturation. Ocean Eng. 2022, 255, 111423. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, C.; Tian, W.; Zhang, M. Formation trajectory tracking control of discrete-time multi-AUV in a weak communication environment. Ocean Eng. 2022, 245, 110495. [Google Scholar] [CrossRef]
- Yan, Z.; Yang, Z.; Yue, L.; Wang, L.; Jia, H.; Zhou, J. Discrete-time coordinated control of leader-following multiple AUVs under switching topologies and communication delays. Ocean Eng. 2019, 172, 361–372. [Google Scholar] [CrossRef]
- Yan, Z.; Pan, X.; Yang, Z.; Yue, L. Formation control of leader-following multi-UUVs with uncertain factors and time-varying delays. IEEE Access 2019, 7, 118792–118805. [Google Scholar] [CrossRef]
- Yan, Z.; Yang, Z.; Pan, X.; Zhou, J.; Wu, D. Virtual leader based path tracking control for Multi-UUV considering sampled-data delays and packet losses. Ocean Eng. 2020, 216, 108065. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, C.; Tian, W.; Cai, S.; Zhao, L. Distributed observer-based formation trajectory tracking method of leader-following multi-AUV system. Ocean Eng. 2022, 260, 112019. [Google Scholar] [CrossRef]
- Zhou, J.; Zhao, X.; Chen, T.; Yan, Z.; Yang, Z. Trajectory tracking control of an underactuated AUV based on backstepping sliding mode with state prediction. IEEE Access 2019, 7, 181983–181993. [Google Scholar] [CrossRef]
- Yan, Z.; Yue, L.; Yang, Z. Coordinated Control of Multiple AUVs with Nonconvex Control Input Constraints. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2021; pp. 4849–4856. [Google Scholar]
- Wang, J.; Wang, C.; Wei, Y.; Zhang, C. Neuroadaptive sliding mode formation control of autonomous underwater vehicles with uncertain dynamics. IEEE Syst. J. 2019, 14, 3325–3333. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, F.; Li, Y.; Qiu, W. Design and numerical investigation of a multi-directional energy-harvesting device for UUVs. Energy 2021, 214, 118978. [Google Scholar] [CrossRef]
- Lin, X.; Tian, W.; Zhang, W.; Zeng, J.; Zhang, C. The leaderless multi-AUV system fault-tolerant consensus strategy under heterogeneous communication topology. Ocean Eng. 2021, 237, 109594. [Google Scholar] [CrossRef]
- Meng, C.; Zhang, X. Distributed leaderless formation control for multiple autonomous underwater vehicles based on adaptive nonsingular terminal sliding mode. Appl. Ocean. Res. 2021, 115, 102781. [Google Scholar] [CrossRef]
- Lin, P.; Ren, W.; Yang, C.; Gui, W. Distributed consensus of second-order multiagent systems with nonconvex velocity and control input constraints. IEEE Trans. Autom. Control 2017, 63, 1171–1176. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Distributed Consensus in Multi-Vehicle Cooperative Control: Theory and Applications; Springer: London, UK, 2007. [Google Scholar]
- Wolfowitz, J. Products of indecomposable, aperiodic, stochastic matrices. Proc. Am. Math. Soc. 1963, 14, 733–737. [Google Scholar] [CrossRef]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).